Автоматика и телемеханика, № 1, 2019
Линейные системы
© 2019 г. В.Н. ТИМИН, канд. техн. наук (timin.victor@rambler.ru),
А.Ю. КУСТОВ, канд. физ.-мат. наук (arkadiykustov@yandex.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва),
А.П. КУРДЮКОВ , д-р техн. наук (akurd@ipu.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва,
МГТУ им. Н.Э. Баумана, Москва),
Д.А. ГОЛЬДИН, канд. техн. наук (goldind@ipu.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва),
Ю.А. ВЕРШИНИН (vershy@coventry.ac.uk)
(Университет Ковентри, Великобритания)
СУБОПТИМАЛЬНАЯ АНИЗОТРОПИЙНАЯ ФИЛЬТРАЦИЯ
ДЛЯ ЛИНЕЙНЫХ ДИСКРЕТНЫХ НЕСТАЦИОНАРНЫХ СИСТЕМ
С НЕЦЕНТРИРОВАННЫМ ВНЕШНИМ ВОЗМУЩЕНИЕМ1
Рассмотрена задача робастной анизотропийной фильтрации для линей-
ной дискретной нестационарной системы на конечном временном интер-
вале. Предполагается, что внешние возмущения, действующие на объект,
имеют ограниченную сверху анизотропию и дополнительно удовлетво-
ряют двум ограничениям на моменты. Решение задачи фильтрации ос-
новано на критерии ограниченности анизотропийной нормы в обратном
времени и сводится к поиску решения задачи выпуклой оптимизации. На
численном примере проиллюстрирована работа субоптимального анизо-
тропийного оценивателя.
Ключевые слова: анизотропийная фильтрация, нестационарные систе-
мы, нецентрированные случайные возмущения, выпуклая оптимизация,
линейные матричные неравенства.
DOI: 10.1134/S000523101901001X
1. Введение
Одной из фундаментальных задач теории управления и обработки сигна-
лов является задача оценивания выхода системы (в смысле минимизации же-
лаемого критерия качества). К ее решению применялись различные методы
(например, калмановская или H2-фильтрация и H∞-фильтрация [1-3]), ко-
торые используют различные предположения о модели процесса и свойствах
возмущающего сигнала. Каждая из этих теорий имеет некоторые недостат-
ки, ввиду чего были предприняты попытки их обобщения, которые привели
в том числе к появлению теории смешанной H2/H∞-фильтрации (см., напри-
мер, [4-6]). Решение задач H2-, H∞- и смешанной H2/H∞-фильтрации осно-
вывается в основном на решении уравнений Риккати (см., например, [7, 8]) и
линейных матричных неравенств (см., например, [9-11]).
1 Работа частично выполнена при финансовой поддержке Российского фонда фундамен-
тальных исследований (проект РФФИ № 17-08-00185 А) и проекта DIONICOS “Dynamics of
and in Complex System” университета Ковентри, проводимого в рамках программы CORDIS
“Community Research and Development Information Service” (Marie Curie Action) (ID 612707).
3
Для линейных дискретных стационарных систем в отсутствие знания о
вероятностном распределении внешнего возмущения в 1994 г. был предло-
жен стохастический подход к H∞-оптимизации, учитывающий возможную
неопределенность в возмущении и позднее названный анизотропийной тео-
рией [12-17].
Задача анизотропийного анализа робастного качества нестационарных си-
стем была решена в [18]. Аналогичный результат в терминах связанных урав-
нений Риккати в прямом и обратном времени для случая нецентрированного
возмущения изложен в [19]. Решение задачи оптимальной анизотропийной
фильтрации для линейных дискретных нестационарных систем на конечном
горизонте было получено И.Г. Владимировым в 2001 г. [20]. Для нахождения
оптимального анизотропийного оценивателя необходимо решить разностное
уравнение Риккати в прямом времени при ограничении в виде алгебраиче-
ского уравнения специального вида.
На основе изложенных в [21] результатов в [22] решена задача субопти-
мальной анизотропийной фильтрации на конечном горизонте в терминах раз-
ностных линейных матричных неравенств в частном случае равенства раз-
мерностей оцениваемого выхода и внешнего возмущения. В [23] в общем слу-
чае сформулированы и доказаны достаточные условия ограниченности ани-
зотропийной нормы в терминах разностных линейных матричных неравенств
в прямом времени. На их основе поставлена и решена задача субоптималь-
ной анизотропийной фильтрации на конечном временном интервале в пря-
мом времени при отсутствии ограничений на первые два момента внешнего
возмущения.
В [24] решены задача анизотропийного анализа и задача синтеза субопти-
мального анизотропийного управления для нестационарной системы с нецен-
трированным возмущением, на первый и второй момент которого были на-
ложены дополнительные условия. Решение задачи анализа было получено в
терминах прямого времени, а затем использовано для синтеза регулятора.
Здесь стоит сразу отметить, что использование полученного решения задачи
анализа (в терминах прямого времени) для решения задачи синтеза оценива-
теля затруднено, в связи с чем необходимо получить аналогичное решение в
обратном времени.
Структура данной работы следующая. В разделе 2 приводятся обозна-
чения и сокращения, кратко излагаются базовые сведения по анизотропий-
ной теории. Критерий ограниченности анизотропийной нормы для линейной
нестационарной системы изложен в разделе 3. Постановка и решение зада-
чи анизотропийной фильтрации излагаются в разделе 4. В разделе 5 на чис-
ленном примере по предложенному алгоритму синтезирован анизотропийный
оцениватель.
2. Предварительные сведения
2.1. Сокращения и обозначения
В статье используются следующие сокращения и обозначения: Rm - мно-
жество векторов длины m с действительными компонентами; Rn×m - множе-
ство матриц размера n × m с действительными компонентами; Lm2 - множе-
4
ство интегрируемых с квадратом случайных векторов со значениями в Rm;
E[·] - оператор математического ожидания; |x| - евклидова норма вектора x;
XT - транспонирование матрицы или вектора X; 0n×m и Im - нулевая и
единичная матрицы размеров n × m и m × m соответственно (для просто-
ты 0 и I, если размерность ясна из контекста); A ≻ B (A ≽ B) означает,
что A - B - положительно (неотрицательно) определенная матрица; trA -
след квадратной матрицы A; det A - определитель квадратной матрицы A;
∗ - симметричный относительно главной диагонали член матрицы; п.р.в. -
плотность распределения вероятности.
2.2. Анизотропийная норма матрицы
В этом разделе приведены определения анизотропии случайного вектора
и анизотропийной нормы матрицы, а также описан математический инстру-
мент ее вычисления.
Рассмотрим два случайных вектора W ∈ Lm2 и Z ∈ Lp2, которые связа-
ны друг с другом посредством матрицы F ∈ Rp×m как Z = F W . Сред-
неквадратичный коэффициент усиления матрицы F определяется как
√
E|F W |2
Q(F, W ) =
. Если никаких дополнительных ограничений на класс
E|W |2
векторов-входов W ∈ Lm2 нет, то максимальное значение Q(F, W ) равно H∞-
норме (т.е. наибольшему сингулярному числу) матрицы F :
√
sup
Q(F, W ) = ∥F ∥∞ = max (λi(FTF )).
W ∈Lm2
i=1,m
С другой стороны, если W принадлежит классу Gm(0; λIm) гауссовских слу-
чайных векторов с нулевым средним и скаля(ной к)вариационной матрицей
cov(W ) = λIm с п.р.в. pλ(w) = (2πλ)-m/2 exp
-|w|2
, где λ > 0, то значение
2λ
Q(F, W ) оказывается равным масштабированной H2-норме (т.е. масштабиро-
ванной фробениусовой норме) матрицы F :
√
∥F ∥2
tr(FTF )
Q(F, W ) =
,
если W ∼ Gm(0; λIm)
∀ λ > 0.
√m=
m
Первой работой по анизотропийной теории для линейных дискретных ста-
ционарных систем является статья [13] (версия для конференции появилась
раньше — в 1994 г. [12]). Ее распространение на линейные дискретные неста-
ционарные системы проведено в [18]. В рамках стохастического подхода, ле-
жащего в основе этих работ, предполагается, что случайные векторы W име-
ют абсолютно непрерывные распределения вероятностей (с п.р.в. f) и конеч-
ные вторые моменты, и определенная для них анизотропия
)
m
( 2πe
A(W ) = minD(f||pλ) =
ln
E|W |2
- h(W )
λ>0
2
m
не превосходит заданный пороговый уровень a ≥ 0, где минимум относи-
тельной энтропии D(f||pλ) (или информационного уклонения Кульбака-
5
Лейблера) случайного вектора W с п.р.в. f относительно гауссовского слу-
чайного вектора с п.р.в. pλ достигается при λ∗ = E|W |2/m. Здесь h(W ) =
= -E [ln f(x)] - дифференциальная энтропия случайного вектора W.
Потребуем дополнительно, что имеют место следующие ограничения на
первый и второй моменты случайного вектора W :
(1)
|EW | ≥ τ, E(|W - EW |2
) ≤ σ,
где τ ≥ 0 и σ > 0 - известные числа. Воспользовавшись свойством масштаб-
ной инвариантности анизотропии, утверждающим, что A(rW ) = A(W ) для
любого неслучайного числа r = 0, без ограничения общности положим, что
τ2 + σ = 1. Таким образом, для определения ограничений (1) достаточно
знания значения τ ∈ [0; 1), а значение второго момента (отмасштабирован-
ного оговоренным образом случайного вектора) будет ограничено числом
σ=1-τ2.
Максимальное значение функционала Q(F, W ) на множестве случайных
векторов c ограниченной числом a ≥ 0 анизотропией A(W ) и ограниче-
ниями (1) на первый и второй моменты с условием τ2 + σ = 1 называется
(a, τ)-анизотропийной нормой матрицы F . Для нее далее используется обо-
значение
(2)
|||F |||a,τ =
sup
Q(F, W ).
W ∈Lm2: (1) ∧ A(W )≤a
Для работы с (a, τ )-анизотропийной нормой матрицы F более удобно поль-
зоваться следующей формулой, эквивалентной определению (2):
{√
|||F |||a,τ = sup
tr(ΛΣ) + ∥F ∥2∞τ2 : trΣ = 1 - τ2,
Σ=ΣT ≻0
}
1
1
-
ln(1 - τ2) ≤ -
ln det (mΣ) ≤ a
,
2
2
где Λ = FTF .
Анизотропийная норма матрицы количественно отражает ее возможности
к усилению случайных векторов-входов, чьи распределения и статистические
характеристики известны лишь с точностью до ограничений (1) на первые два
момента и ограничения на анизотропию A(W ) ≤ a. Последнее ограничение
выступает своего рода компромиссом между двумя граничными случаями -
когда известно, что вектор-вход является неслучайным (т.е. имеет распреде-
ление вероятностей, полностью “сконцентрированное” в наихудшем направ-
лении; это имеет место в H∞-теории), и когда известно, что вектор-вход с
одинаковой вероятностью может принять значения в любых направлениях
(т.е. когда с точностью до умножения на ненулевое неслучайное число он
имеет стандартное нормальное распределение; это имеет место в H2-теории).
Замечание 1. Далее на (a,0)-анизотропийную норму будем ссылаться
посредством обозначения |||F |||a, где условие τ = 0 для краткости опущено.
6
2.3. Вычисление анизотропийной нормы нестационарной системы,
представленной в пространстве состояний
Рассмотрим объект, заданный линейной дискретной нестационарной си-
стемой F на временном интервале k = 0, . . . , N,
{ x
(3)
F ∼k+1 =Akxk +Bkwk,
zk = Ckxk + Dkwk
с начальным условием x0 = 0. Здесь xk ∈ Rn - вектор состояния, wk ∈ Rmw -
вектор внешнего возмущения, zk ∈ Rpz - вектор выхода. Вещественные мат-
рицы Ak, Bk, Ck, Dk, зависящие от дискретного времени k, имеют согласо-
ванные с векторами размерности. Система (3) на каждом шаге дискретного
времени k определяется четверкой матриц Fk = (Ak, Bk, Ck, Dk) и ассоцииру-
ется с блочной нижнетреугольной матрицей
F0:N = block
(fij) ∈ Rpz(N+1)×mw (N+1)
0≤i,j≤N
с элементами-блоками
⎧
⎨CiTi,j+1Bj, если i > j,
fi,j =
Dj,
если i = j,
⎩
0,
если i < j,
где Ti,j = Ai-1Ti-1,j и Tj,j = In.
Матрица F0:N задает вход-выходные соотношения системы F в виде
Z0:N = F0:N W0:N, где для краткости записи введены обозначения W0:N =
= (wT0 , . . . , wTN )T и Z0:N = (zT0 , . . . , zTN )T. Согласно описанной эквивалентно-
сти в представлениях, под нормой системы F имеется в виду соответствую-
щая норма матрицы F0:N , в частности, ∥F ∥2 = ∥F0:N ∥2, |||F |||a,τ = |||F0:N |||a,τ
и ∥F ∥∞ = ∥F0:N ∥∞. Для гарантированного выполнения строгого неравен-
ства ∥F ∥2/√m < ∥F∥∞, где m = mw(N + 1), предполагается, что справедли-
во неравенство pz < mw.
В следующей теореме приведены формулы вычисления (a, τ)-анизотро-
пийной нормы |||F |||a,τ нестационарной системы в пространстве состояний.
Теорема 1
[19]. Пусть даны число a ≥ -m2 ln(1 - τ2), где τ ∈ [0; 1),
и система F с представлением в пространстве состояний
(3). Тогда
(a, τ)-анизотропийная норма системы F вычисляется согласно правилу
|||F |||a,τ = N (A-1(a)), где
(
)1/2
Φ(q) - 1
(4)
N (q) =
N0(q)(1 - τ2) + ∥F∥2∞τ2
,
N0(q) =
,
qΦ(q)
m
m
(5)
A(q) = A0(q) -
ln(1 - τ2), A0(q) =
(ln Φ(q) - Ψ(q)) ,
2
2
1
∑
1
∑
(6)
Φ(q) =
tr(LkPkLTk + Sk), Ψ(q) =
ln det Sk.
m
m
k=0
k=0
7
Семейства матриц {Lk}Nk=0, {Sk}Nk=0 связаны с решением {Pk}Nk=0 разност-
ного уравнения Ляпунова
Pk+1 = (Ak + BkLk)Pk(Ak + BkLk)T + BkSkBTk, P0 = 0
и решением {Qk}Nk=0 разностного уравнения Риккати
Qk = ATkQk+1Ak + qCTkCk + LTkS-1kLk, QN+1 = 0
выражениями
Sk = (Im - BTkQk+1Bk - qDTkDk)-1,
Lk = Sk(BTkQk+1Ak + qDTkCk),
где q = A-1(a).
Замечание 2. В силу зависимости функции N(q) от ∥F∥∞ к приведен-
ным в теореме выражениям формально необходимо добавить формулу вы-
числения H∞-нормы системы F . А в рамках условия ограниченности ани-
зотропийной нормы |||F |||a, о котором пойдет речь далее, добавить условие
ограниченности ∥F ∥∞.
Замечание 3. При τ = 0 формулы (4)-(6) задают правило вычис-
ления (a, 0)-анизотропийной нормы системы F , при этом N (q) = N0(q),
A(q) = A0(q) и |||F |||a = N0(A-10(a)).
3. Критерий ограниченности анизотропийной нормы
В данном разделе сформулирован критерий ограниченности анизотропий-
ной нормы нестационарной системы в терминах обратного времени. Перво-
начально критерий ограниченности анизотропийной нормы нестационарной
системы был сформулирован и доказан Максимовым Е.А., а чуть позже пере-
формулирован Владимировым И.Г. в терминах прямого времени [21]. Однако
результаты проделанной Максимовым Е.А. работы так и не были опублико-
ваны в связи с его безвременной кончиной, поэтому кратко и без доказатель-
ства приводятся (с некоторыми изменениями) в данном разделе. Для начала
сформулируем вспомогательное утверждение, вытекающее из теоремы 1 и
замечания 3.
Теорема 2
[24]. Пусть задана линейная дискретная нестационарная
система F с моделью в пространстве состояний (3). Пусть также заданы
числа τ ∈ [0; 1), a ≥ -m2 ln(1 - τ2) и γ > 0. Следующие утверждения эквива-
лентны:
• (a, τ)-анизотропийная норма |||F |||a,τ системы F ограничена числом γ, т.е.
|||F |||a,τ ≤ γ;
• существуют такие числа γ1 > 0 и γ2 > 0, что |||F |||b ≤ γ1, ∥F ∥∞ ≤ γ2 и
γ21(1 - τ2) + γ22τ2 ≤ γ2, где b = a +m2 ln(1 - τ2).
8
Из этой теоремы, в частности, следует, что критерий ограниченности
нестационарной системы с нецентрированным возмущением связан с крите-
рием ограниченности той же системы с центрированным возмущением (вер-
нее, с возмущением, удовлетворяющим условию τ = 0 и соответствующим об-
разом измененным ограничением на анизотропию) и его предельным случаем
lim
|||F |||a = ∥F ∥∞.
a→∞
В теореме ниже приведен критерий ограниченности анизотропийной нор-
мы для нестационарной системы вида (3) с центрированным возмущени-
ем в терминах обратного времени. Принимая во внимание обозначение
Fk = (Ak, Bk, Ck, Dk) для четверки матриц системы (3), для краткости из-
ложения введем функцию
Φ(Fk, q, R) = ATkRAk + qCTkCk +
+ (ATk RBk + qCTk Dk)(Im - BTk RBk - qDTk Dk)-1(BTk RAk + qDTk Ck).
Еще раз отметим, что основа этого утверждения принадлежит Е.А. Макси-
мову.
Теорема 3. Пусть задана линейная дискретная нестационарная систе-
ма F с моделью в пространстве состояний (3). Пусть также заданы числа
a ≥ 0 и γ > 0. Следующие утверждения эквивалентны:
• a-анизотропийная норма системы F ограничена числом γ, т.е. |||F |||a ≤ γ;
• существует такое число q ≥ 0, что разностное уравнение Риккати Rk =
= Φ(Fk,q,Rk+1), RN+1 = 0, имеет симметричное положительно опреде-
ленное решение Rk = RTk ≻ 0, удовлетворяющее неравенствам
Sk = Im - BTkRk+1Bk - qDTkDk ≻ 0,
∑
ln det Sk ≥ m ln(1 - qγ2) + 2a.
k=0
Доказательство. Доказательство данной теоремы включает в себя
часть результатов работ [18, 21], которые не дублируются здесь, но к которым
даются соответствующие отсылки. Все доказательство формально состоит из
четырех частей. Во-первых, в [21] получены условия ограниченности анизо-
тропийной нормы нестационарной системы в терминах прямого времени, но
ход доказательства (до формулы (32)) сохраняет силу и в рассматриваемом
здесь случае. Это в том числе приведет к тому, что решение задачи напрямую
будет связано с матрицей Σ(q) = (I - qFT0:N F0:N )-1, характеризующей “наи-
худшее” входное возмущение. Во-вторых, матрицу Σ(q) = (I - qFT0:N F0:N )-1
можно факторизовать как Σ(q) = G0:N GT0:N , что приводит к матричному
уравнению qFT0:N F0:N + G-T0:N G-10:N = I, представимому в более компактном
виде
[√
]
qF
0:N
ΘTΘ = I, Θ =
G-1
0:N
9
Матрица Θ отождествима с системой с (A, B, C, D)-представлением
⎡
⎤
Ak
B
k
√
⎢
qCk
√qD
k
⎥
Θ∼
⎣
⎦.
-S-1/2kLk S-1/2
k
В-третьих, если воспользоваться леммой 7 работы [18], то для выполнения
условия ΘTΘ = I достаточно потребовать существования решения уравне-
ния Риккати Rk = Φ(Fk, q, Rk+1), RN+1 = 0, причем использованные выше
вспомогательные матрицы Lk и Sk имеют вид
Lk = S-1k(BTkRk+1Ak + qDTkCk),
Sk = (Im - BTkRk+1Bk - qDTkDk).
Наконец, возвращаясь снова к [21] (к заключительной части доказательства),
получаем, что условие ограниченности анизотропии вектора W0:N входных
сигналов может быть переписано в виде
∑
ln det Sk ≥ m ln(1 - qγ2) + 2a,
k=0
что завершает доказательство.
В [24, теорема 3] был приведен похожий результат, но, поскольку в ней
решалась задача управления, его формулировка дана в терминах решения
уравнений Риккати в прямом (а не обратном) времени.
Следующая теорема устанавливает достаточные условия ограниченно-
сти анизотропийной нормы нестационарной системы в терминах разностных
неравенств Риккати в обратном времени.
Теорема 4. Пусть задана линейная дискретная нестационарная систе-
ма F с моделью в пространстве состояний (3). Пусть также заданы числа
τ ∈ [0;1), a ≥ -m2 ln(1 - τ2) и γ > 0. Следующие утверждения эквивалент-
ны:
• (a, τ)-анизотропийная норма |||F |||a,τ системы F ограничена числом γ, т.е.
|||F |||a,τ ≤ γ;
• существуют такие числа γ1 > 0 и γ2 > 0, связанные условием γ21(1 - τ2) +
+γ22τ2 ≤ γ2, и такое число q ≥ 0, что разностные неравенства Рикка-
ти Pk ≻ Φ(Fk,q,Pk+1), PN+1 = 0
Pk ≻ Φ(Fk,q
Pk+1),
PN+1 = 0 имеют
положительно определенные решения Pk ≻ 0
Pk ≻ 0, удовлетворяющие
неравенствам
Qk = Im - BTkPk+1Bk - qDTkDk ≻ 0,
∑
ln det Qk ≥ m ln(1 - τ2) + 2b,
k=0
где b = a +m2 ln(1 - τ2).
10
Доказательство теоремы основано на хорошо известных свойствах моно-
тонности решения разностных уравнений Риккати.
Следующим стандартным в рамках анизотропийной теории шагом являет-
ся переход от строгих формул вычисления анизотропийной нормы с исполь-
зованием решения уравнений Риккати к условию ее ограниченности, опираю-
щемуся на матричные неравенства Риккати, полученные из соответствующих
уравнений в силу свойства монотонности их решения. К полученным неравен-
ствам применяется лемма Шура, в результате чего имеем достаточные усло-
вия ограниченности анизотропийной нормы в терминах линейных матричных
неравенств. Данные выкладки достаточно громоздки и потому опущены, но
их аналоги, связанные с решением задачи управления, можно проследить
в [24]. Таким образом, достаточные условия ограниченности анизотропийной
нормы нестационарной системы имеют следующий вид.
Теорема 5. Пусть задана линейная дискретная нестационарная си-
стема F с моделью в пространстве состояний (3). Пусть также зада-
ны b = a +m2 ln(1 - τ2) ≥ 0 и γ > 0. Анизотропийная норма системы удо-
влетворяет ограничению |||F |||b ≤ γ, если существуют число η ≥ 0 и такие
положительно определенные матрицы Mk и Ψk, что линейные матричные
неравенства
⎡
⎤
Mk
∗
∗
∗
⎡
⎤
⎢
⎥
MN
∗
∗
⎢
0
ηIm
∗
∗⎥
⎢
⎥
⎢
⎥≻0
при k < N,
⎣ 0
ηIm
∗⎦ ≻ 0,
⎢
⎥
⎣Mk+1Ak Mk+1Bk Mk+1
∗⎦
CN DN Ip
Ck
Dk
0
Ip
⎤
⎡ηIm - Ψk
∗
∗
[
]
ηIm - ΨN
∗
⎢
⎥
⎣ Mk+1Bk Mk+1
∗⎦≻0
при k < N,
≻0
DN Ip
Dk
0
Ip
разрешимы, а их решения дополнительно удовлетворяют условию
(
)
2b
exp
-
(det Ψk)1/mw ≥ η - γ2.
m
На основе сформулированной выше теоремы найдем коэффициенты суб-
оптимального анизотропийного оценивателя для нестационарной системы.
4. Постановка и решение задачи фильтрации
Постановка и решение задачи субоптимальной анизотропийной фильтра-
ции на конечном горизонте в прямом времени для случая τ = 0 была пред-
ставлена с доказательствами, рассмотрением предельных случаев и анализом
численного примера в [23].
11
Рассмотрим линейную дискретную нестационарную систему F , заданную
на конечном интервале времени k = 0, . . . , N, следующего вида:
xk+1 = Akxk + Bkwk,
(7)
yk = Cy,kxk + Dy,kwk,
zk = Cz,kxk + Dz,kwk,
где xk ∈ Rn - вектор состояния, wk ∈ Rmw - вектор внешнего возмущения,
yk ∈ Rpy - измеряемый выход, zk ∈ Rpz - оцениваемый выход. Вещественные
матрицы Ak, Bk, Cy,k, Dy,k, Cz,k, Dz,k имеют согласованные с векторами раз-
мерности. На множество сигналов внешнего возмущения наложено ограни-
чение в виде уровня анизотропии A(W ) ≤ a и задано число τ ∈ (0; 1).
Систему-оцениватель векторов zk будем искать в виде
(8)
xk+1 = (Ak - KkCy,k)xk + Kkyk,
zk = (Czk - LkCy,k)xk + Lkyk,
где xk - состояние оценивателя, а Kk и Lk - матрицы, подлежащие нахожде-
нию.
Система Tzw, связывающая на интервале времени k = 0, . . . , N векторы wk
внешнего возмущения системы (7) и векторы ошибки zk = zk - zk, имеет вид
xk+1 = (Ak - KkCy,k)xk + (Bk - KkDy,k)wk,
zk = (Cz,k - LkCy,k)xk + (Dz,k - LkDy,k)wk,
где xk = xk - xk - вектор ошибки состояния.
Задача 1. Для заданной системы F с моделью в пространстве состоя-
ний (7), числа τ ∈ (0;1) и уровня анизотропии a ≥ -m2 ln(1 - τ2) найти па-
раметры оценивателя с моделью в пространстве состояний (8), миними-
зирующие значение γ, где
|||Tzw|||a,τ ≤ γ.
Применим к системе Tzw утверждение теоремы 5. Тогда для ограниченно-
сти анизотропийной нормы системы в ошибках должны существовать число
η ≥ 0 и положительно определенные матрицы Mk и Ψk, удовлетворяющие
линейным матричным неравенствам
⎡
⎤
Mk
∗
∗
∗
⎢
⎥
⎢
0
ηIm
∗
∗⎥
⎢
⎥≻0
при k < N,
⎢
⎥
⎣Mk+1(Ak - KkCy,k) Mk+1(Bk - KkDy,k) Mk+1
∗⎦
Cz,k - LkCy,k
Dz,k - LkDy,k
0
Ip
12
⎡
⎤
MN
∗
∗
⎢
⎥
⎣
0
ηIm
∗⎦ ≻ 0,
Cz,N - LN Cy,N Dz,N - LNDy,N Ip
⎡
⎤
Mk
∗
∗
∗
⎢
⎥
⎢
0
γ22Im
∗
∗⎥
⎢
⎥≻0
при k < N,
⎢
⎥
⎣Mk+1(Ak - KkCy,k) Mk+1(Bk - KkDy,k) Mk+1
∗⎦
Cz,k - LkCy,k
Dz,k - LkDy,k
0
Ip
⎡
⎤
MN
∗
∗
⎢
⎥
⎣
0
γ22Im
∗⎦ ≻ 0,
Cz,N - LN Cy,N Dz,N - LNDy,N Ip
⎡
⎤
ηIm - Ψk
∗
∗
⎢
⎥
⎣Mk+1(Bk - KkDy,k) Mk+1
∗⎦≻0
при k < N,
(Dz,k - LkDy,k)
0
Ip
[
]
ηIm - ΨN
∗
≻ 0,
Dz,N - LNDy,N Ip
причем их решения должны удовлетворять условиям
(
)
2b
γ21(1 - τ2) + γ22τ2 ≤ γ2, exp
-
(det Ψk)1/mw ≥ η - γ21.
m
Проведем замену Mk+1Kk = Yk+1, в результате чего получим следующую
задачу выпуклой оптимизациии, в соответствии с решением которой опреде-
ляются матрицы Kk и Lk оценивателя:
γ2 →
min
Mk,Yk,Ψk,η,γ1,γ2
при ограничениях
Mk = MTk ≻ 0, Ψk = ΨTk ≻ 0, η ≥ 0,
⎡
⎤
Mk
∗
∗
∗
⎢
⎥
⎢
0
ξImw
∗
∗
⎥
⎢
⎥≻0
при k < N,
⎢
⎥
⎣Mk+1Ak - Yk+1Cy,k Mk+1Bk - Yk+1Dy,k Mk+1
∗
⎦
Cz,k - LkCy,k
Dz,k - LkDy,k
0
Ipz
⎡
⎤
MN
∗
∗
⎢
⎥
⎣
0
ξImw
∗
⎦ ≻ 0,
Cz,N - LNCy,N Dz,N - LNDy,N Ipz
13
где в последних двух семействах матричных неравенств должны быть сдела-
ны подстановки ξ = η и ξ = γ22,
⎡
⎤
ηImw - Ψk
∗
∗
⎢
⎥
⎣Mk+1Bk - Yk+1Dy,k Mk+1
0
⎦≻0
при k < N,
Dz,k - LkDy,k
0
Ipz
[
]
ηImw - ΨN
∗
≻0,
Dz,N - LNDy,N Ipz
(
)
γ21(1 - τ2) + γ22τ2 ≤ γ2, exp
-2bm
(det Ψk)1/mw ≥ η - γ21.
Если решение этой задачи найдено, то матрицы Kk оценивателя находятся
как Kk = M-1k+1Yk+1.
5. Пример
В рамках примера рассмотрим систему
x1,k+1 = -0,3x2,k + sin(3k)wk,
x2,k+1 = 0,2(1 + sin(3k))x1,k - 0,3x2,k - 0,03wk,
zk = 0,5x1,k + 0,5sin(3k)x2,k,
y1,k = (-2 + 0,3sin(5k))x1,k + 0,5x2,k + 0,1sin(3k)wk,
y2,k = x2,k + 0,2wk
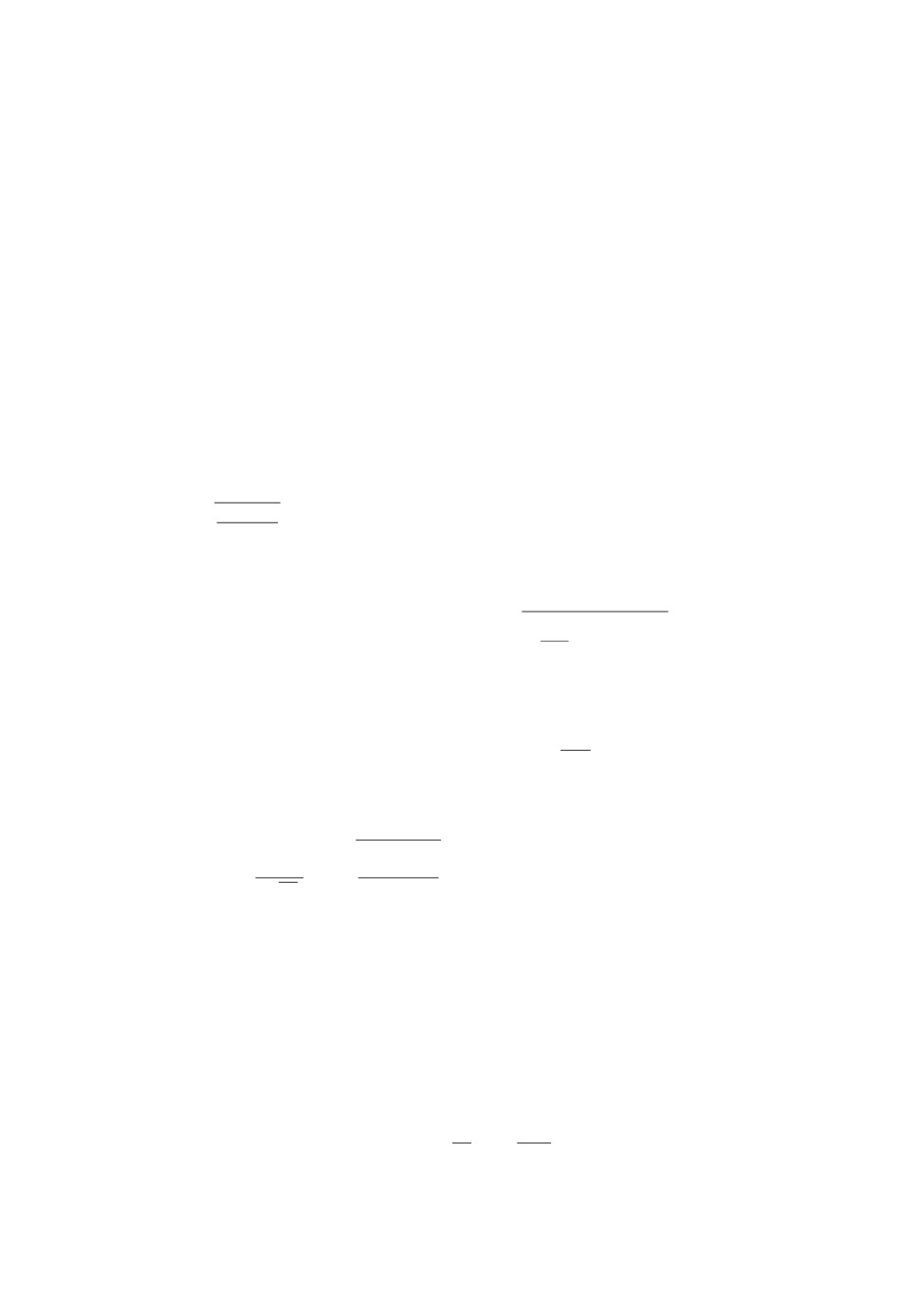
с начальным состоянием x1(0) = 0,26, x2(0) = -0,2.
0,25
0,1
x1
x2
0,2
0,05
0,15
0
-0,05
0,1
-0,1
0,05
-0,15
0
-0,2
0
0,2
0,4
0,6
0,8
0
0,2
0,4
0,6
0,8
Рис. 1. Динамика переменных x1 и x2 в отсутствие внешнего возмущения
(представлена только первая секунда времени).
14
w (τ = 0,03)
w (τ = 0,7)
2,5
2
1,5
1
0,5
0
-0,5
-1
-1,5
0
1
2
3
4
5
6
7
8
9
Рис. 2. Внешнее возмущение w. Случаи τ = 0,03, a = 10 и τ = 0,7, a = 40.
x1
^
x1
3
~
x
1
2
1
0
-1
-2
-3
0
1
2
3
4
5
6
7
8
9
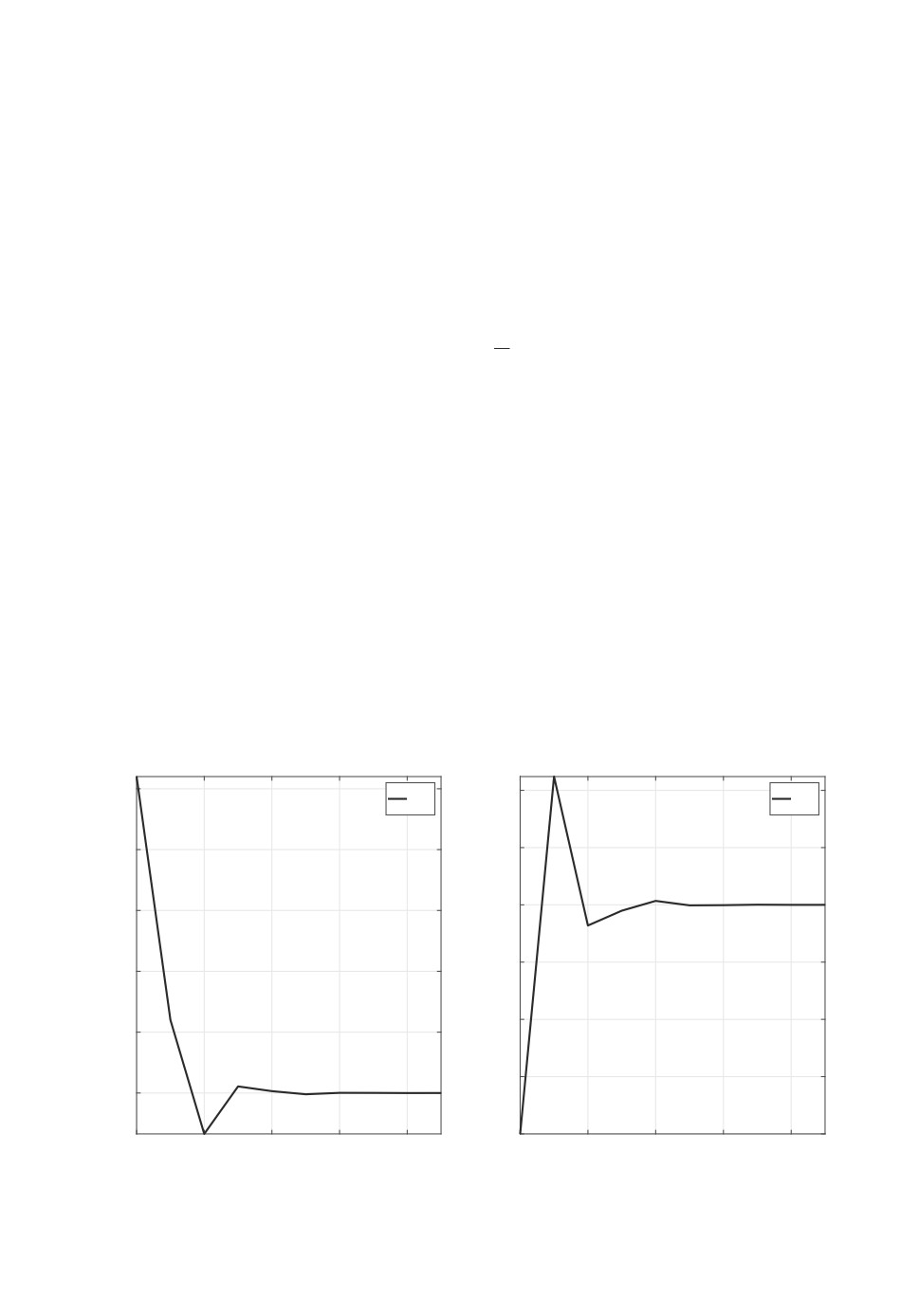
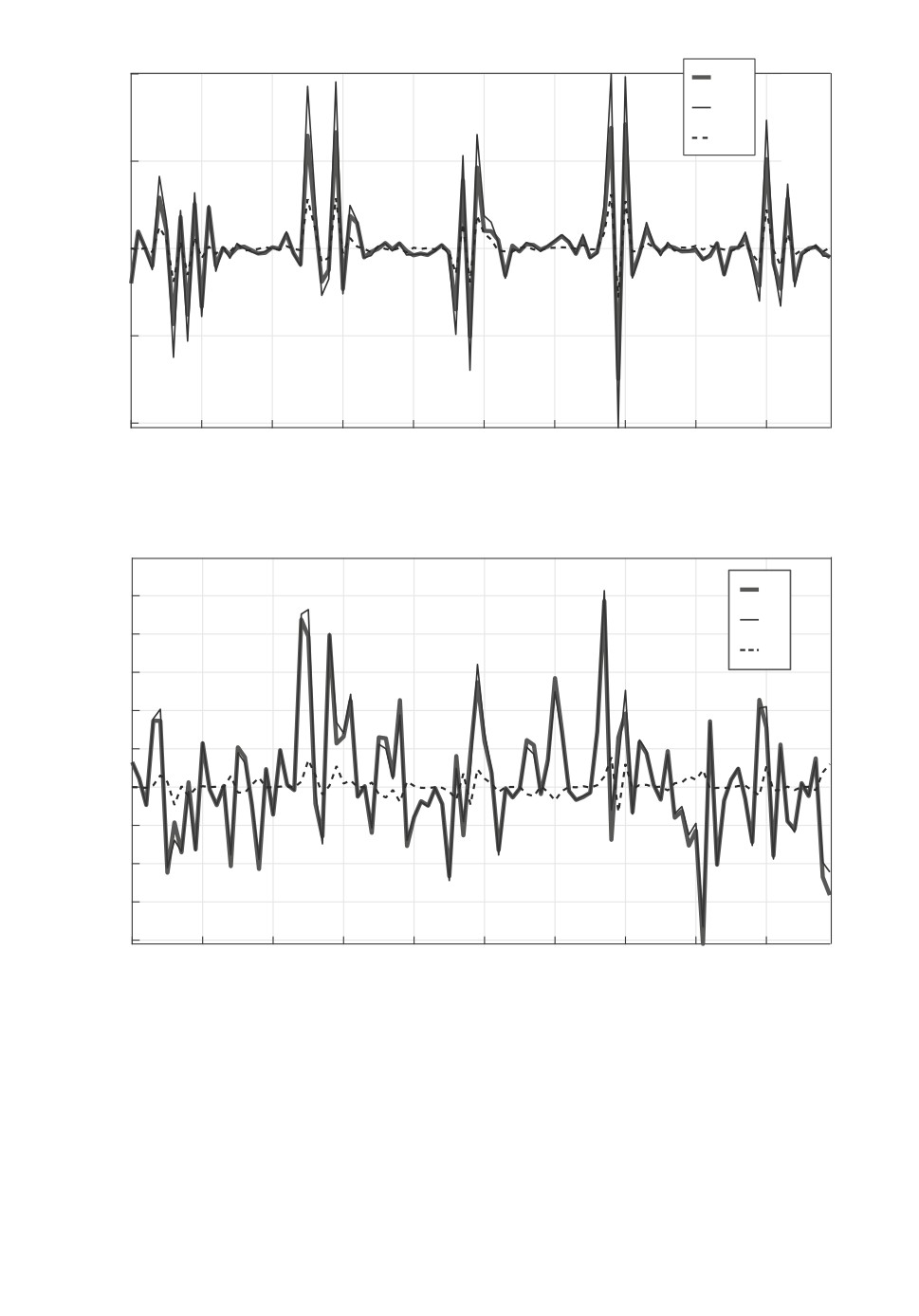
Рис. 3. Динамика переменной x1. Случаи τ = 0,03, a = 10.
Для расчета были выбраны следующие данные: интервал времени
T = 10 с, шаг дискретизации Δt = 0,1 с, значения анизотропии возмущения
при τ = 0,03 выбираются равными a = 0,05, a = 10 и a = 100 соответственно,
значения анизотропии возмущения при τ = 0,7 выбираются равными a = 35,
a = 40 и a = 100 соответственно. Расчеты произведены в среде программиро-
вания MATLAB с использованием пакетов Yalmip и Sedumi [25, 26].
15
1
x2
^
x2
~
x
2
0,5
0
-0,5
-1
0
1
2
3
4
5
6
7
8
9
Рис. 4. Динамика переменной x2. Случаи τ = 0,03, a = 10.
z
0
^
0,8
z~
0,6
0,4
0,2
0
-0,2
-0,4
-0,6
-0,8
0
1
2
3
4
5
6
7
8
9
Рис. 5. Динамика переменной z. Случаи τ = 0,03, a = 10.
На рис. 1 показаны переменные x1 и x2 системы (в первую секунду вре-
мени) в отсутствие внешних возмущений. На рис. 2 показаны используемые
при моделировании возмущения w для случаев τ = 0,03, a = 10 и τ = 0,7,
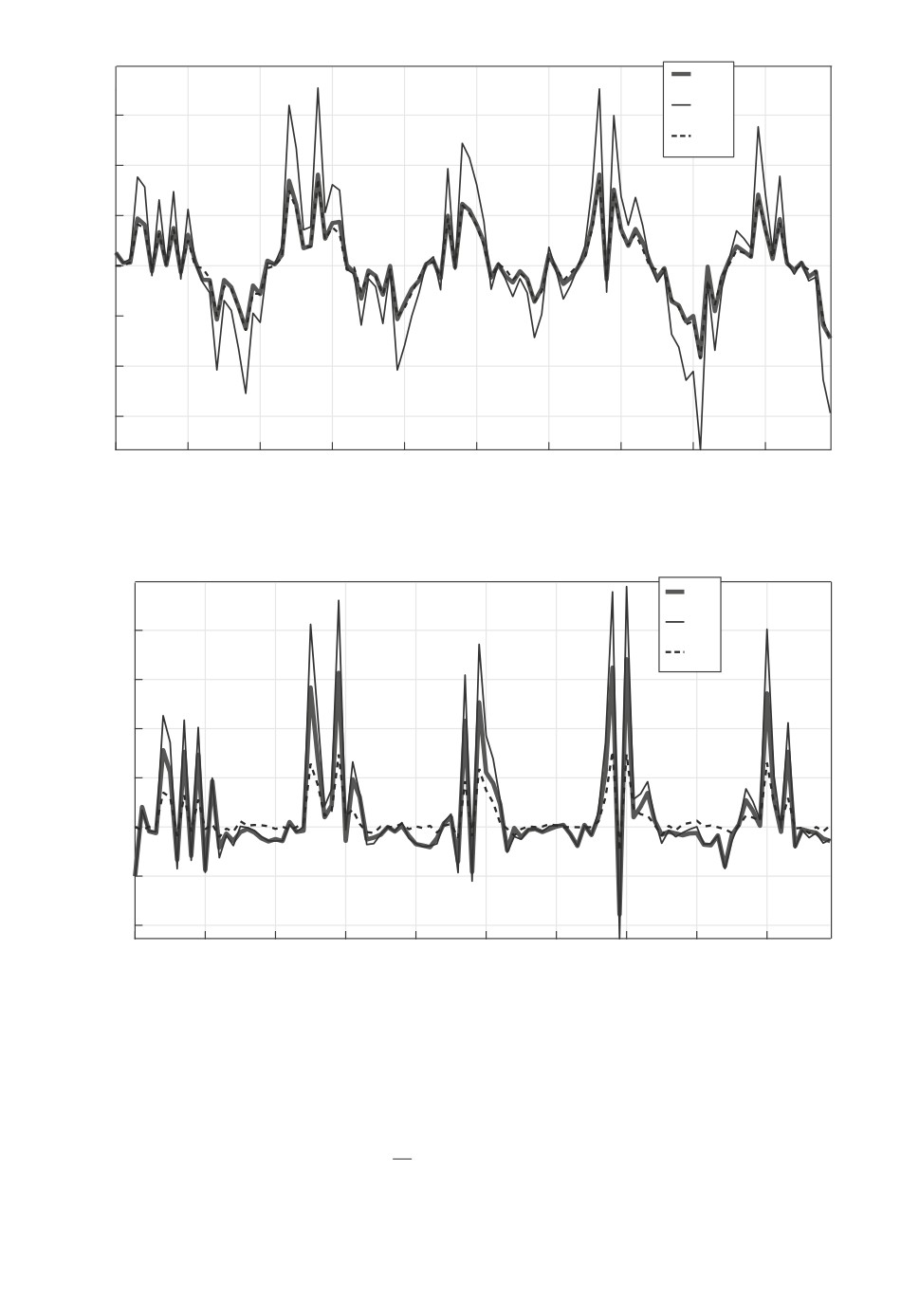
a = 40. На рис. 3 показаны переменная x1, ее оценка и ошибка оценивания;
на рис. 4 - переменная x2, ее оценка и ошибка оценивания; на рис. 5 - выход z,
а также его оценка и ошибка оценивания. Все графики приведены для случая
τ = 0,03, a = 10. На рис. 6-8 приведены аналогичные переменные для случая
16
x1
^
x1
3
~
x
1
2
1
0
-1
-2
-3
0
1
2
3
4
5
6
7
8
9
Рис. 6. Динамика переменной x1. Случаи τ = 0,7, a = 40.
x2
^
x2
0,8
~
x
2
0,6
0,4
0,2
0
-0,2
-0,4
0
1
2
3
4
5
6
7
8
9
Рис. 7. Динамика переменной x2. Случаи τ = 0,7, a = 40.
τ = 0,7, a = 40. Из рисунков следует, что анизотропийный оцениватель адек-
ватно оценивает выход системы как при наличии (почти) центрированного
возмущения, так и в случае нецентрированного.
Для сравнения значений анизотропийной нормы системы для разных слу-
чаев с ее границами (∥Tzw∥2/√m = 0,0511, ∥T˜zw∥∞ = 0,0970) приведена таб-
лица, из которой наглядно видно, что анизотропийная норма занимает про-
межуточное положение между масштабированной H2- и H∞-нормами.
17
z
1
^
~
0,8
0,6
0,4
0,2
0
-0,2
-0,4
-0,6
-0,8
0
1
2
3
4
5
6
7
8
9
Рис. 8. Динамика переменной z. Случаи τ = 0,7, a = 40.
Значения анизотропийной нормы для различных пар (a, τ)
τ
0,03
0,7
a
0,05
10
100
35
40
100
|||Tzw|||a,τ
0,0513
0,0683
0,0931
0,0791
0,0818
0,0930
6. Заключение
В работе кратко приводятся результаты, касающиеся вычисления и кри-
терия ограниченности анизотропийной нормы нестационарной системы. На
их основе приводится решение задачи синтеза субоптимального анизотро-
пийного оценивателя в обратном времени. Показано, что решение этой за-
дачи соответствует решению некоторой задачи выпуклой оптимизации. Для
демонстрации качества работы оценивателя для простой системы приведен
численный пример.
СПИСОК ЛИТЕРАТУРЫ
1. Anderson B.D.O., Moore J.B. Optimal filtering. Englewood Cliffs. N.J.: Prentice
Hall, 1979.
2. Hassibi B., Sayed A., Kailath T. Indefinite Quadratic Estimation and Control:
A Unified Approach to H2 and H∞ Theories. SIAM, Philadelphia, 1999.
3. Simon D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches. New
Jersey: John Wiley and Sons, 2006.
4. Zhou K., Glover K., Bodenheimer B., Doyle J. Mixed H2 and H∞ performance
objectives I: Robust performance analysis // IEEE Trans. Automat. Control. 1994.
V. 39. P. 1564-1574.
5. Haddad W.M., Bernstein D.S., Mustafa D. Mixed-norm H2/H∞ regulation and
estimation: the discrete-time case // Syst. Control Lett. 1991. V. 16. No.
4.
P. 235-247.
18
6.
Khargonekar P.P., Rotea M.A., Baeyens E. Mixed H2/H∞ filtering // Int. J. Robust
Nonlinear Control. 1996. V. 6. P. 313-330.
7.
Bernstein D.S., Haddad W.M. Steady-state Kalman filtering with an H∞ error
bound // Syst. Control Lett. 1989. V. 12. P. 9-16.
8.
Limebeer D.J.N., Anderson B.D.O., Hendel B. Mixed H2/H∞ filtering by the theory
of Nash games/ Proc. Workshop Robust Control. Tokyo. Japan. 1992. P. 9-15.
9.
Huaizhong Li., Minyue Fu. A Linear Matrix Inequality Approach to Robust H∞
Filtering // IEEE Trans. Signal Proc. 1997. V. 45. No. 9. P. 2338-2350.
10.
Wang Z., Unbehauen H. Robust H2/H∞ state estimation for systems with error
variance constraints: The continuous-time case // IEEE Trans. Automat. Control
1999. V. 44. P. 1061-1065.
11.
Palhares R.M., Peres P.L.D. LMI approach to the mixed H2/H∞ filtering design
for discrete-time uncertain systems // IEEE Trans. Aerospace Electron. Syst. 2001.
V. 37. No. 1. P. 292-296.
12.
Semyonov A.V., Vladimirov I.G., Kurdjukov A.P. Stochastic approach to H∞-op-
timization
// Proc.
33
IEEE Conf. Decision Control. Florida(USA).
1994.
P. 2249-2250.
13.
Владимиров И.Г., Курдюков А.П., Семенов А.В. Стохастическая проблема
H∞-оптимизации // Докл. РАН. 1995. Т. 343. № 5. C. 607-609.
14.
Владимиров И.Г., Курдюков А.П., Семенов А.В. Анизотропия сигналов и энтро-
пия линейных стационарных систем // Докл. АН. 1995. Т. 342. № 5. С. 583-585.
15.
Vladimirov I.G., Kurdjukov A.P. Semyonov A.V. On computing the anisotropic
norm of linear discrete-time-invariant systems // Proc. 13 IFAC World Congr., San-
Francisco, California, USA, June 30-July 5. 1996.
16.
Vladimirov I.G., Kurdjukov A.P., Semyonov A.V. State-space solution to anisotropy-
based stochastic H∞-optimization problem // Proc. 13 IFAC World Congr. San-
Francisco(USA). 1996. P. 427-432.
17.
Vladimirov I.G. Anisotropy-based optimal filtering in linear discrete time invariant
systems // CADSMAP Res. Report 01-03, 2001, arXiv: 1412.3010 [completed in
2001].
18.
Владимиров И.Г., Даймонд Ф., Клоеден П. Анизотропийный анализ робастного
качества линейных нестационарных дискретных систем на конечном временном
интервале // АиТ. 2006. № 8. C. 92-111.
Vladimirov I.G., Diamond P., Kloeden P. Anisotropy-based Robust Performance
Analysis of Finite Horizon Linear Discrete Time Varying Systems // Autom. Remote
Control. 2006. V. 67. No 8. P. 1265-1282.
19.
Кустов А.Ю., Тимин В.Н. Анизотропийный анализ нестационарных систем на
конечном интервале времени при нецентрированном возмущении // АиТ. 2017.
№ 6. С. 18-35.
Kustov A.Yu., Timin V.N. Anisotropy-based Analysis for Finite Horizon Time-
varying Systems with Non-centered Disturbances // Autom. Remote Control. 2017.
V. 78. No. 6. P. 974-988.
20.
Vladimirov I., Diamond P. Robust filtering in finite horizon linear discrete time
varying systems by minim um anisotropic norm criterion // CADSMAP Res. Report
01-05, 2001. [completed in 2001].
21.
Maximov E.,A., Kurdyukov A.P., Vladimirov I.G. Anisotropic Norm Bounded Real
Lemma for Linear Time-Varying System // Preprint 18-th IFAC World Congr.
Milano. 2011. P. 4701-4706.
19
22. Yaesh I., Stoica A.-M. Linear Time-Varying Anisotropic Filtering its Application to
Nonlinear Systems State Estimation // Proc. Eur. Control Conf. Strasburg. 2014.
June 24-27. P. 975-980.
23. Тимин В.Н., Курдюков А.П. Субоптимальная анизотропийная фильтрация на
конечном горизонте // АиТ. 2016. № 1. С. 5-29.
Timin V.N., Kurdyukov A.P. Suboptimal Anisotropic Filtering in a Finite Horizon //
Autom. Remote Control. 2016. V. 77. No. 1. P. 1-20.
24. Kustov A.Yu., Timin V.N. Suboptimal Anisotropy-based Control for Linear Discrete
Time Varying Systems with Noncentered Disturbances // Proc. 13th IFAC World
Congr., Toulouse, France, July 9-14. 2017. P. 6296-6301.
25. Lofberg J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB // Proc.
CACSD Conf. Taipei, Taiwan. 2004.
26. Sturm J.F. Using SeDuMi 1.02, a MATLAB Toolbox for Optimization Over
Symmetric Cones // Optim. Methods Software. 1999. V. 11. P. 625-653.
Статья представлена к публикации членом редколлегии П.С. Щербаковым.
Поступила в редакцию 29.12.2017
После доработки 26.04.2018
Принята к публикации 08.11.2018
20