Автоматика и телемеханика, № 6, 2020
Управление в социально-экономических
системах
© 2020 г. М.И. ГЕРАСЬКИН, д-р экон. наук (innovation@ssau.ru)
(Самарский национальный исследовательский университет
имени академика С.П. Королева)
СВОЙСТВА ПРЕДПОЛОЖИТЕЛЬНЫХ ВАРИАЦИЙ
В НЕЛИНЕЙНОЙ МОДЕЛИ ОЛИГОПОЛИИ ШТАКЕЛЬБЕРГА
Рассматривается теоретико-игровая проблема выбора оптимальных
стратегий агентов рынка олигополии при линейной функции спроса и
нелинейных функциях издержек агентов. Исследуются предположитель-
ные вариации, т.е. предполагаемые агентом изменения действий контр-
агентов, оптимизирующие функции полезности последних. Доказаны
формулы расчета предположительных вариаций каждого агента, суммы
предположительных вариаций всех агентов окружения, исследованы зна-
ки предположительных вариаций для произвольного уровня лидерства
по Штакельбергу. Установлены следующие свойства предположительных
вариаций: 1) вариации отрицательны, если для всех агентов окружения
функции издержек либо выпуклы, либо вогнуты; 2) вариации положи-
тельны, если в окружении агенты с вогнутыми функциями издержек (т.е.
с положительным эффектом расширения масштаба), превалируют над
агентами с выпуклыми функциями издержек (т.е. с отрицательным эф-
фектом). Сумма предположительных вариаций агента: 1) отрицательна и
ограничена по модулю единицей, если агенты окружения преимуществен-
но имеют выпуклые функции издержек; 2) положительна и не ограниче-
на, если среди окружения преобладают агенты с вогнутыми функциями
издержек.
Ключевые слова: олигополия, игра Штакельберга, степенная функция из-
держек, многоуровневое лидерство.
DOI: 10.31857/S0005231020060074
1. Введение
На рынке олигополии действия агентов, максимизирующие их полезно-
сти, приводят к равновесию Нэша [1, 2] как решению соответствующей иг-
ры. Несмотря на то, что функции полезности агентов считаются известными
всем агентам, при моделировании олигополии имеет место фундаменталь-
ная проблема несовершенства информированности агента о действиях других
агентов (окружения). Проблема заключается в априорной неосведомленности
каждого агента о том, на основе какого предположения окружение выбирает
действия: предположения о неизменности действий агента, предположения о
наилучшем ответе агента на действия окружения, предположения о наилуч-
шем ответе агента на наилучший ответ окружения и т.д.
105
В теоретико-игровой модели рынка олигополии предположительные ва-
риации являются классическим инструментом [3] описания информирован-
ности агента о стратегиях других агентов (окружения). Предположительная
вариация характеризует предполагаемое агентом ответное изменение дей-
ствия (объема выпуска) контрагента, оптимизирующее функцию полезности
последнего при выбранном действии первого.
В линейной модели выбора оптимальных действий агентов рынка олигопо-
лии [4-10], в которой обратная функция спроса и функции издержек агентов
являются линейными, вычисление предположительных вариаций не вызы-
вает затруднений. В нелинейной модели [11-14], в которой обратная функ-
ция спроса линейная, а функции издержек агентов нелинейные, предположи-
тельные вариации в аналитическом виде получены только в играх с лидером
(лидерами) по Штакельбергу [15] первого уровня. В случае лидерства более
высоких уровней предположительные вариации находятся из систем нели-
нейных уравнений [16] на каждом уровне и для каждого агента.
В данной статье ставится задача вычисления предположительных вариа-
ций в аналитическом виде для произвольного уровня лидерства по Штакель-
бергу, что позволяет исследовать влияние уровня лидерства на характер по-
ведения игроков.
2. Методология
Рассматривается задача оптимального стратегического выбора олигопо-
листов, относящаяся к классу агрегативных игр [17, 18], в которых функция
полезности игрока зависит не только от его собственной стратегии, но и от
стратегий, выбранных окружением. В этом случае нелинейная модель выбора
оптимальных действий агента рынка олигополии имеет вид
{
}
Q∗i = arg maxΠi (Q,Qi) = arg max
(a - bQ)Qi - CFi - BiQβi
,
i
Qi≥0
Qi≥0
(1)
∑
i∈N, Q= Qi,
i∈N
где Qi, Πi
действие (объем выпуска) и функция полезности (прибыль)
i-го агента; N
множество агентов рынка; n количество агентов; Q
суммарный объем рынка; CFi > 0, Bi > 0, βi ∈ (0, 2) коэффициенты функ-
ций издержек вида Ci(Qi) = CFi + BiQβii, CF i интерпретируется как посто-
янные издержки; a > 0, b > 0 коэффициенты обратной функции спроса;
символом ¾∗¿ обозначены оптимальные значения. В общем случае функции
издержек агентов могут быть как вогнутыми при 0 < βi < 1, так и выпуклы-
ми при 1 < βi < 2; первый случай соответствует положительному эффекту
расширения масштаба и наблюдается на стадии становления фирмы, второй
случай, присущий зрелым фирмам, характеризует отрицательный эффект
расширения масштаба [19].
Равновесие Нэша в модели (1) определяется из необходимых условий экс-
тремума:
∂Πi (Qi,xij)
(2)
= 0, i, j ∈ N,
∂Qi
106
где xij = Q′
предположительная вариация в уравнении реакции i-го аген-
jQi
та, т.е. предполагаемое изменение выпуска j-го агента в ответ на единичный
прирост выпуска i-го агента.
Уровень лидерства агента по Штакельбергу определяются следующим
образом. Нулевой уровень, соответствующий ведомому η0-му агенту, имеет
место, если в η0-м уравнении системы (2) полагается x0η0j=0∀j∈N\η0,
где верхний индекс предположительной вариации обозначает уровень ли-
дерства r. Первый уровень лидерства η1-го агента возникает, если в η1-м
уравнении системы (2) вариации x1η1jвычисляютсядифференцированием
по Qη1
остальных (N - 1) уравнений (2), в которых полагается x0ij = 0
∀j ∈ N\i. Произвольный r-й уровень лидерства ηr-го агента возникает, ес-
ли в ηr-м уравнении системы (2) вариации xrηr jвычисляютсядифференци-
рованием по Qηr остальных (N - 1) уравнений (2), в которых полагается
xij = xr-1ij ∀j ∈ N\i.
Подмножество агентов окружения i-го агента, имеющих один и тот же уро-
вень лидерства, обозначено символом M = {l ∈ N\i}, число элементов этого
множества обозначено символом m = n - 1.
Для модели выбора действий (1) i-го агента на r-м уровне лидерства ре-
шения системы (2) удовлетворяют [16] системе уравнений
∑
Fri = a - bQ - bQi 1 +
xr
-BiβiQβi-1i = 0,
ij
(3)
j∈N\i
Qi > 0, i ∈ N,
при условии
(4)
gri = ui - Sri
< 0, i ∈ N,
с учетом следующих обозначений
βi-2
∑
Biβi (βi - 1) Q
i
(4а)
ui = -2 -
< 0, Sri =
xril
,
i∈N,
b
l∈N\i
где gri (•), i ∈ N непрерывные и дифференцируемые по Qi функции, харак-
теризующие выполнение достаточного условия максимума (условия унимо-
дальности) функции (1) i-го агента; ui (•), i ∈ N - функции, характеризую-
щие влияние нелинейности функций издержек агентов на унимодальность
функции полезности i-го агента (при ui = -2 система (3) является линейной);
Sri
величина суммы предположительных вариаций i-го агента относитель-
но действий окружения на r-м уровне лидерства; Fri (•), i ∈ N - непрерыв-
ные и дифференцируемые по Qi функции. Для последующих содержатель-
ных интерпретаций введем следующую трактовку1 условий (4): если функ-
ция Fri характеризует темп (или ¾скорость¿) изменения функции полезности
1 Здесь используется аналогия с терминологией, принятой в механике при решении за-
дачи о вертикальном равноускоренном движении тела, которое достигает максимальной
высоты подъема в случае, если ускорение гравитации g направлено противоположно на-
чальной скорости, т.е. отрицательно.
107
i-го агента на r-м уровне лидерства, то функцию gri можно назвать ¾уско-
рением¿ функции полезности агента. Поэтому согласно условию (4) функ-
ция полезности агента является унимодальной в окрестности стационарной
точки, определяемой уравнением (3), если ¾ускорение¿ функции полезности
отрицательно.
По сравнению с линейной моделью, для которой условие (4) имеет вид
gri = -2 - Sri < 0, i ∈ N, в нелинейной модели (1) функция полезности агента
может быть неунимодальной не только вследствие влияния действий окруже-
ния, т.е. ситуаций, когда Sri < -2, но и в результате положительного эффекта
расширения масштаба функции издержек агента. Поэтому введем предполо-
жение о том, что темп снижения предельных издержек при возрастающей
отдаче от масштаба (т.е., βi < 1) меньше, чем темп снижения цены при уве-
личении объема предложения
(5)
MC′iQ
=Biβi |βi - 1| Qβi-2i < b ∀βi
< 1,
i
где MCi = C′iQi = BiβiQβi-1i предельные издержки i-го агента. Предполо-
жение (5) гарантирует выполнение условия (4), если не выполнено условие
|Sri| < 1.
Поставим за
{
}
i-го агента xri = xrij , j ∈ N в аналитическом виде при произвольном зна-
чении r.
3. Результаты
Способ вычисления предположительных вариаций для различных уров-
ней лидерства сформулирован в виде утверждения, доказательство которого
приведено в Приложении.
Утверждение 1. В системе уравнений (3), соответствующей модели
выбора действий агентов (1) при линейной функции спроса и нелинейных
функциях издержек, предположительные вариации выпуска l-го агента в
уравнении i-го агента
а) на первом уровне лидерства (r = 1) вычисляются по формуле
∑
Δr
1
il
(6а)
xril =
,
l ∈ M, m = n - 1, если
=1 и zrj
= 0 ∀j ∈ M,
Δr
zr
i
j
j∈M
где
∏
∑
∏
Δri =
zrj -
zrj,
j=1\i
γ=1\i j=1\(γ,i)
∏
(
)
Δril =
zrj, zrj
=ψr uj -Sr-1
+ 1, ψ1 = 1, S0j = 0;
j
j=1\(l,i)
108
{) на втором }овне лидерства (r = 2) вычисляются как вектор x2i =
=
x2i1,x2i2,... ,x2im
, полученный в результате решения следующего мат-
ричного уравнения
(6b)
Ax2i
= B,
где матрица системы A = {alj, l, j ∈ M} и вектор свободных членов B =
= {bi1, bi2, . . . , bim} состоят из элементов
alj = uj - S1j ∀l = j,
[
]
∑
Ql uj + 2
βj - 2
alj = -1 -
(
)2 Δlj Δl +
Δ1
∀l = j,
lk
Qj uj + 1
Δ1
l
k∈M
[
]
∑
Ql ui + 2
βi - 2
bil = 1 -
(
)2 Δli Δl +
Δ1
,
l,j ∈ M;
lk
Qi ui + 1
Δ1
l
k∈M
в) на r-м уровне лидерства приближенно вычисляются по формуле (6а),
в которой следует положить
(
)
(ũ + 2)
2
β
1
ψr =
,
ϕr = ψr
,
ψr > 0,
1+ϕr-1
(ψr ũ + 1 - m)2
(
)
β-2
β
β-1
ũ = -2 -
,
b
r-1
∂x
iη
если производные предположительных вариаций
, i, η, ζ ∈ N вычислены
∂Qζ
при фиксированном значении Qi =Q, i ∈ N и при таких параметрах функ-
ций издержек, что в ε-окрестности (ε = o
β,B)) чисе
β > 0,B > 0 выпол-
няется условие
(
)
(6c)
Fri
Q,B
β
- Fri (Qi,Bi,βi) < ε, ε > 0, i ∈ N,
г) на любом уровне лидерства не зависят от действия i-го агента, и
зависимость этих вариаций от действий других агентов ослабляется с ро-
стом их действий
∂xriη
∂xriη
(6d)
= 0, lim
= 0 ∀i,η,ζ ∈ N.
∂Qi
Qζ→∞ ∂Qζ
д) погрешность δxri = xri - Xri вычисления предположительных вариа-
ций по формулам (6а) при r > 2 по сравнению с точным решением Xri ={}
= Xrij,j ∈ N системы Axri = B при Qi ≥Qi ∀i ∈ N, рассчитанная с при-
∑m
менением нормы ∥A∥ = max
|aij |, ограничена относительной величи-
j=1
1≤i≤m
ной
(
)
∥δxri∥
µ
ϕr-1 + ε
(6e)
≤
+µ
при µµ < 1,
∥xri∥
1-µµ
1-ε
109
где
[
]
∑
Ql
ε
βi - 2
ε= max
ψr
(
)2 Δli-1
Δr-1l +
Δr-1lk
,
i,l∈M
Qi (ψr (ε - 2) + 1)
Δr-1
l
k∈M
) 1
ϕr-1-ε
2-βi
(m - 1)
(Biβi |βi - 1|
µ=
,
Qi =
,
εb
min
uj - Sr-1j
+ (m - 1)(1 - ε)
1≤j≤m
Δr-1l,Δr-1li вычислены при uj = ε - 2,
max
uj - Sr-1j
+(m-1)(1+ ε)
1≤j≤m
µ=
число обусловленности матрицы A.
min
uj - Sr-1j
-(m-1)(1+ ε)
1≤j≤m
Формулы (6а) точно определяют в явном виде предположительные ва-
риации агентов на первом уровне лидерства, решение системы (6b) позво-
ляет точно определить эти величины на втором уровне лидерства. На тре-
тьем и последующих уровнях лидерства формулы (6а) позволяют прибли-
женно вычислить предположительные вариации в явном виде. В этом слу-
чае точность расчета предположительных вариаций базируется на выполне-
нии условия (6с), а также на свойстве (6d) слабого влияния действий других
агентов на предположительные вариации данного агента. Относительная по-
грешность приближенного расчета предположительных вариаций при r > 2
оценивается условием (6е).
В (6а) введено обозначение параметра типа i-го агента на r-м уровне ли-
дерства:
(
)
gr-1i
zri = ψr
ui - Sr-1i
+1=ψrgr-1i +1=
+ 1.
1+ϕr-1
Поскольку величина ϕr приближенно выражает сумму производных пред-
положительных вариаций (как показано в доказательстве утверждения 1),
то содержательное значение параметра типа следующее: если zri < 0, то
(
)
gr-1i < -
1+ϕr-1
, т.е. на (r - 1)-м уровне лидерства ¾ускорение¿ функции
полезности агента меньше суммы темпов изменения предположительных ва-
риаций действий агентов окружения, в противном случае zri > 0. Поскольку
при прочих равных условиях (т.е. одинаковых значениях Bi, Qi и Sr-1i) зна-
чение функции gr-1i определяется согласно (4) вогнутостью (выпуклостью)
функции издержек агента, то gr-1i больше в случае 0 < βi < 1, чем в случае
1 < βi < 2. Следовательно, тип агента zri > 0 соответствует положительному
эффекту расширения масштаба, а тип агента zri < 0 присущ отрицательному
эффекту.
Согласно (6а), предположительные вариации зависят от значений функ-
ции ui. Кроме того, формулы (6а) представляют собой рекуррентные соот-
ношения, поскольку предположительные вариации i-го агента на r-м уровне
110
лидерства зависят от сумм предположительных вариаций остальных аген-
тов на предыдущем (r - 1)-м уровне лидерства, т.е. от величины Sr-1j =
∑
фигури-
= l∈N\jxjl1.Посколькусуммапредположительныхвариаций
i
рует в уравнении i-го агента системы уравнений (3) и влияет на результи-
рующее равновесие Нэша, то эта величина имеет важное практическое и тео-
ретическое значение. Поэтому определим в виде следующего утверждения
способ нахождения суммы предположительных вариаций в уравнении каж-
дого агента.
Утверждение 2. Сумма предположительных вариаций действий
агентов окружения, принадлежащих подмножеству M, в
уравнении
реакции i-го агента системы уравнений (3) на уровне лидерства r
а) вычисляется по формуле
∑
1
1
(7а)
Sri =
xril =
,
sri =
∑
,
S0i
= 0, i ∈ N,
1
sri - 1
l∈M
zrj
j∈M
б) имеет следующие знаки:
S1i < 0 ∀m ≥ 1,
< 0 ∀zrj < 0, i,j = 1,2,(
)
Sr-1
<0 ∀ zrj >0∧
<|uj| ,
Sr
i
при m = 1,
i
(
)
(7b)
>0 ∀ zrj >0∧
Sr-1i
>|uj|
< 0 ∀sri < 0,
Sri
< 0 ∀(sri > 0 ∧ υr < υmax),
при m > 1;
> 0 ∀(sri > 0 ∧ υr > υmax)
в) ограничена
<1∀m≥1,
S1i
{
1 ∀zr
< 0,
(
j
|Sri| <
) при m = 1,
max i-1
(7c)
Smaxi∀ zrj > 0 ∧
Sr
< |uj|
i
{
1∀sri < 0,
|Sri| <
m
при m > 1;
∀sri > 0
m-1-υr
причем при m > 1, r > 1, если Sri < 0, то
m
(7d)
υr ∈ (0,υmax) ,
|Sri| <
;
m-1-υmax
г) не зависит от действия i-го агента, и зависимость Sri от действий
других агентов ослабляется с увеличением их действий:
∂Sri
∂Sri
(sri)2
ψr
= 0,
=
(
)2 βj (βj - 1) (βj - 2) Qjj-3,
∂Qi
∂Qj
(sri
- 1)2
b zr
j
(7e)
∂Sri
lim
= 0, i, j ∈ N,
Qj→∞ ∂Qj
111
где
(
√
)2
r
ψ
ψmax
1+
ψmax
υr =
,
υ2 = 0, υmax =
√
,
m
-1
m
ψmax
1+υr-1
ψmax = arg maxψr, rmaxi = arg max r,
r>1
|Sr-1i|<|uj |
1
Smaxi =
.
max i-1
ψrmax i
uj - Sr
j
Из утверждения
2
следует, что сумма предположительных вариа-
ций в уравнении реакции агента отрицательна за исключением случаев
zrj > 0 ∧
Sr-1
>|uj| при m = 1, а также sri > 0 ∧ υr > υmax при m > 1, возни-
i
кающих на высоких уровнях лидерства агента (при r > rmaxi или υr > υmax
соответственно) и при положительных эффектах расширения масштаба у
агента (агентов) окружения. Кроме того, из утверждения 2 вытекают сле-
дующие выводы о величине суммы предположительных вариаций: 1) вели-
чина Sri по модулю не превышает единицы при r = 1, а также если sri < 0,
что выполняется, когда значения всех (или большинства, если эти значения
незначительно отличаются) параметров zrj отрицательны; 2) если sri > 0, то
при r > 1 величина Sri по модулю может превышать единицу; 3) если sri > 0,
то с увеличением m верхняя граница модуля величины Sri уменьшается.
Таким образом, в дуополии (m = 1) и триполии (m = 2) при положитель-
ном для всех фирм эффекте расширения масштаба, т.е. |uj | < 2, возможны
случаи, когда на высоких уровнях лидерства модуль величины Sri больше
единицы.
Сумма предположительных вариаций i-го агента согласно (7а) зависит от
знака параметра sri, который есть функция параметров типа агентов zrj, зави-
сящих, в свою очередь, от суммы предположительных вариаций в уравнении
реакции агента на предыдущем уровне лидерства. Сумма предположитель-
ных вариаций i-го агента согласно (7b), как правило, отрицательна, а ее наи-
большее абсолютное значение по (7с) также зависит от знака параметра sri и
от параметра нелинейности ψr через υr согласно (7d), что будет исследовано
ниже при моделировании. Согласно (7е) изменение суммы предположитель-
ных вариаций с увеличением действия агента окружения зависит от типа
эффекта расширения масштаба последнего, т.е.
∂Sri
{ < 0, если βj > 1,
∂Qj
> 0, если βj < 1.
Положительность (отрицательность) предположительной вариации вы-
пуска агента окружения в уравнении (3) i-го агента означает, что окружение
увеличивает (уменьшает) свое действие в ответ на прирост действия данного
агента. Поэтому знак предположительной вариации определяет тип агента
окружения, который, как вытекает из следующего утверждения, может быть
различным.
112
Утверждение 3. Предположительные вариации выпуска l-го агента в
уравнении (3) i-го агента имеют следующие знаки:
(8а)
x1il
< 0, l ∈ M,
(
)
(
)
xril < 0, если
zrj < 0∀j ∈ M
∨
zrj > 0∀j ∈ M
∨
(8b)
1
∨zrθ|θ∈Θ > 0 ∧ zrθ|θ∈¯Θ < 0 ∧ 1
>1+
,
srΘ
sr¯
Θ
1
xril > 0, если zrθ|θ∈Θ > 0 ∧ zrθ|θ∈¯Θ < 0 ∧ 1
<1+
,
srΘ
(8с)
sr¯
Θ
l ∈ M, r > 1,
где
{
}
{
}
Θ=θ∈M:zr
Θ= θ∈M :zrθ >0 ,
θ
<0
и введены обозначения
1
1
srΘ =
∑
,
sr¯Θ =
∑
1
1
zr
zr
θ
θ
θ∈Θ
θ∈Θ
Согласно (8а), (8b) предположительные вариации, как правило, отрица-
тельны, т.е. на увеличение действия окружения типичный агент реагирует
уменьшением своего действия. Однако из условия (8с) следует, что могут су-
ществовать агенты противоположного типа, отвечающие на увеличение дей-
ствия окружения симметрично, которых назовем атипичными. Атипичным
согласно (8с) является агент, в окружении которого агенты, имеющие zrj < 0,
преобладают над агентами, имеющими zrj > 0. Отметим, что в линейной мо-
дели олигополии, в которой uj = -2 и все zrj < 0, атипичные агенты невоз-
можны.
4. Моделирование
На выполнение достаточных условий оптимальности (4), а также на пред-
положительные вариации согласно (6а) существенное влияние оказывает
функция
βi-2
Biβi (βi - 1) Q
i
ui (Qi) = -2 -
,
Qi > 0,
b
зависящая от параметров функций издержек агентов Bi > 0, βi ∈ (0, 2) и от
параметра функции рыночного спроса b > 0. Анализ [20] телекоммуникаци-
онных компаний РФ (табл. 1) показал, что коэффициент издержек Bi ∈ (1, 3),
113
Таблица 1. Коэффициенты функции спроса на голосовой трафик и
функций издержек телекоммуникационных компаний РФ, CFi = 0,
i = 1,2,3
Статистическая модель
a
b
Bi βi
Функция спроса
1,77
0,0009
Функция издержек ПАО ¾МТС¿
2,41
0,76
Функция издержек ПАО ¾МегаФон¿
1,36
0,85
Функция издержек ПАО ¾ВымпелКом¿
2,46
0,81
если Qi ∈ (0, 500) млрд. мин., параметр b = 0,0009 руб./мин., т.е. имеет место
соотношение σ =Bib≈1000.
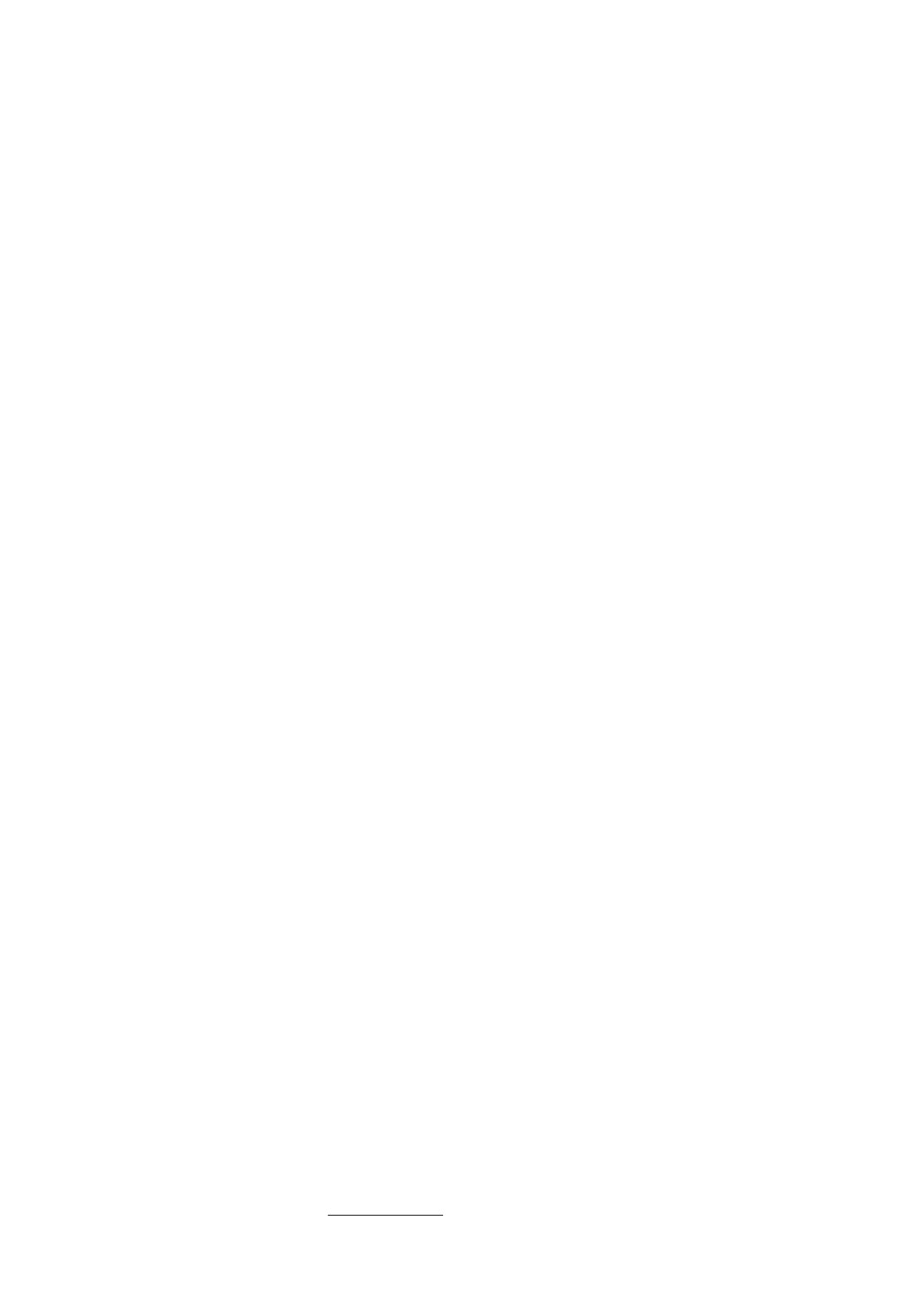
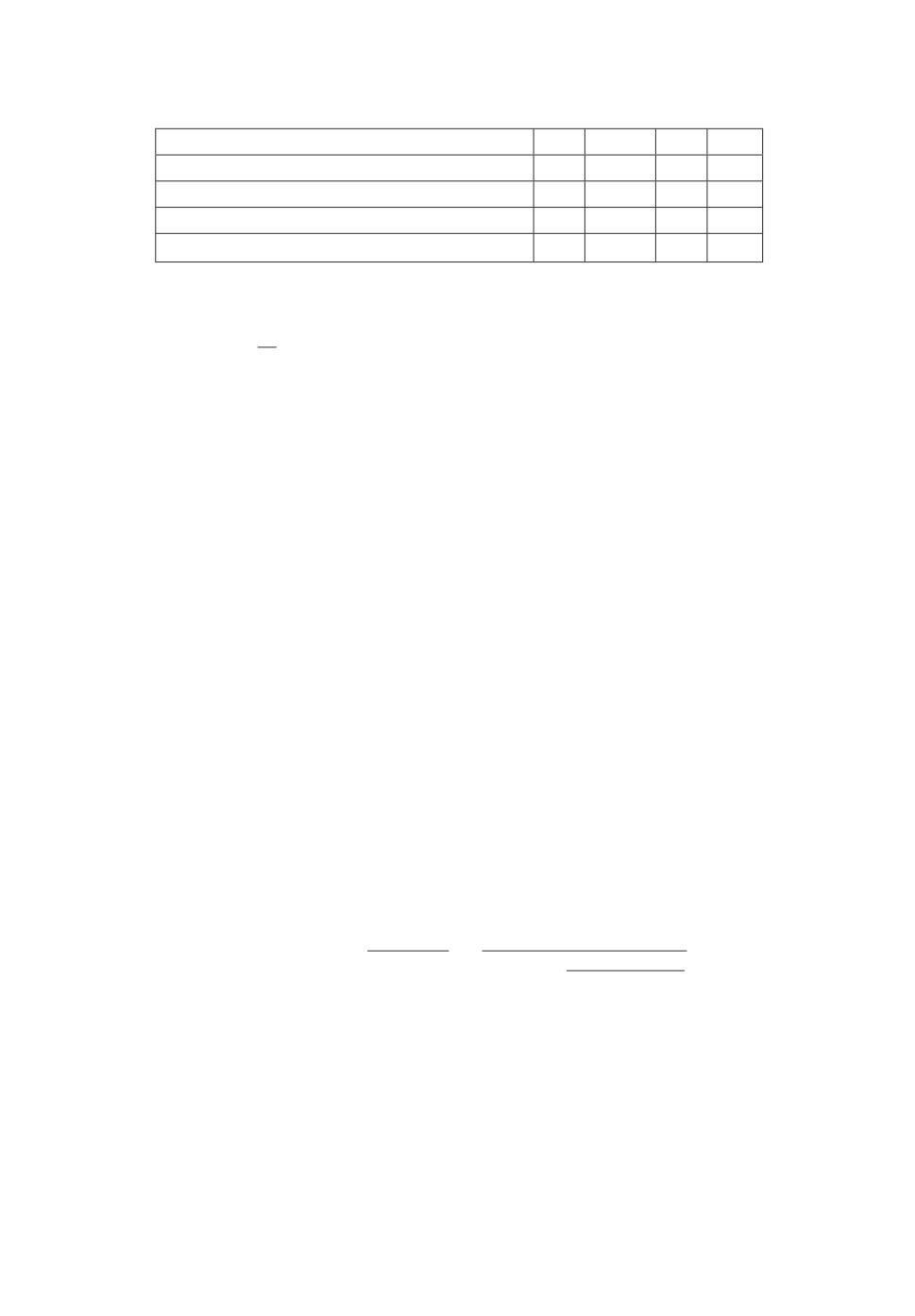
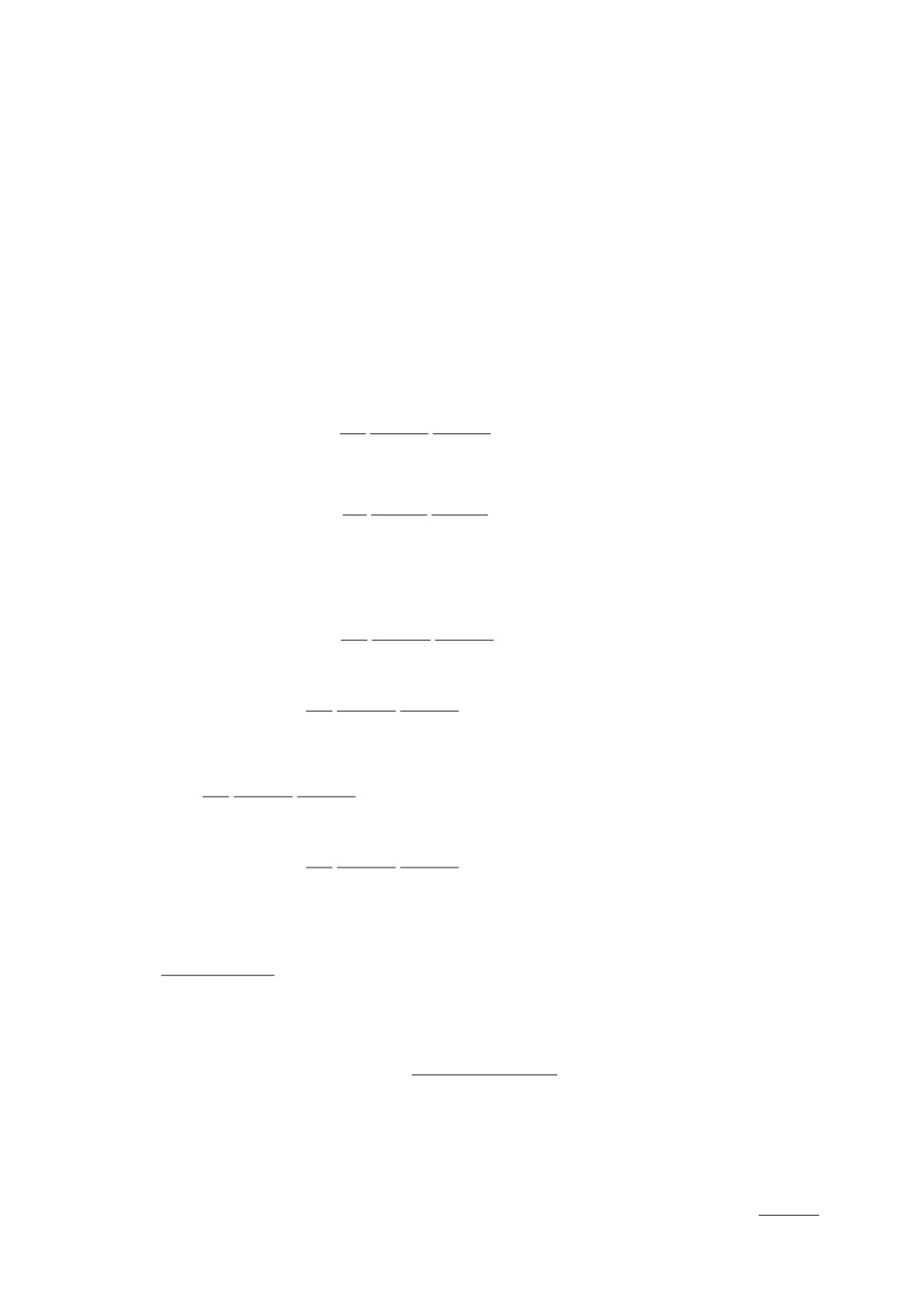
Поэтому исследуем следующую двухпараметрическую функцию ui (Qi) ≈
≈ - 2 - σβi (βi - 1)Qβi-2i в диапазоне Qi ∈ (100,500) млрд. мин. при различ-
ных значениях параметров σ, βi. Из анализа графиков функции ui (Qi), пред-
ставленных на рис. 1, следует, во-первых, что условие (4) не выполняется при
малых значениях Qi в случае высоких значений коэффициента издержек (при
σ = 5000), но даже в этом случае условие (4) выполняется при Qi ≥ 150. Во-
вторых, условие (5) в виде |uj| ≥ 1∀βj ∈ (0, 2) может не выполняться также
при малых значениях Qi в случае высоких значений коэффициента издер-
жек (при σ = 5000) и если βj < 1, но выполняется при достаточно больших
значениях Qi ≥ 250. В-третьих, в определенном диапазоне значений Qi аген-
ты в зависимости от значения параметра βj делятся на два типа агенты
с положительным эффектом расширения масштаба при βj < 1 и агенты с
отрицательным эффектом расширения масштаба при βj > 1:
{
≥ 2 ∀βj ≥ 1,
|uj|
∈ [1, 2) ∀βj < 1.
В-четвертых, при достаточно высоких значениях выпусков, т.е. Qi ≥ 250, и ес-
ли коэффициенты издержек близки к соотношению σ = 1000, функция ui (Qi)
принадлежит диапазону -2,76 ≤ ui (Qi) ≤ -1,76.
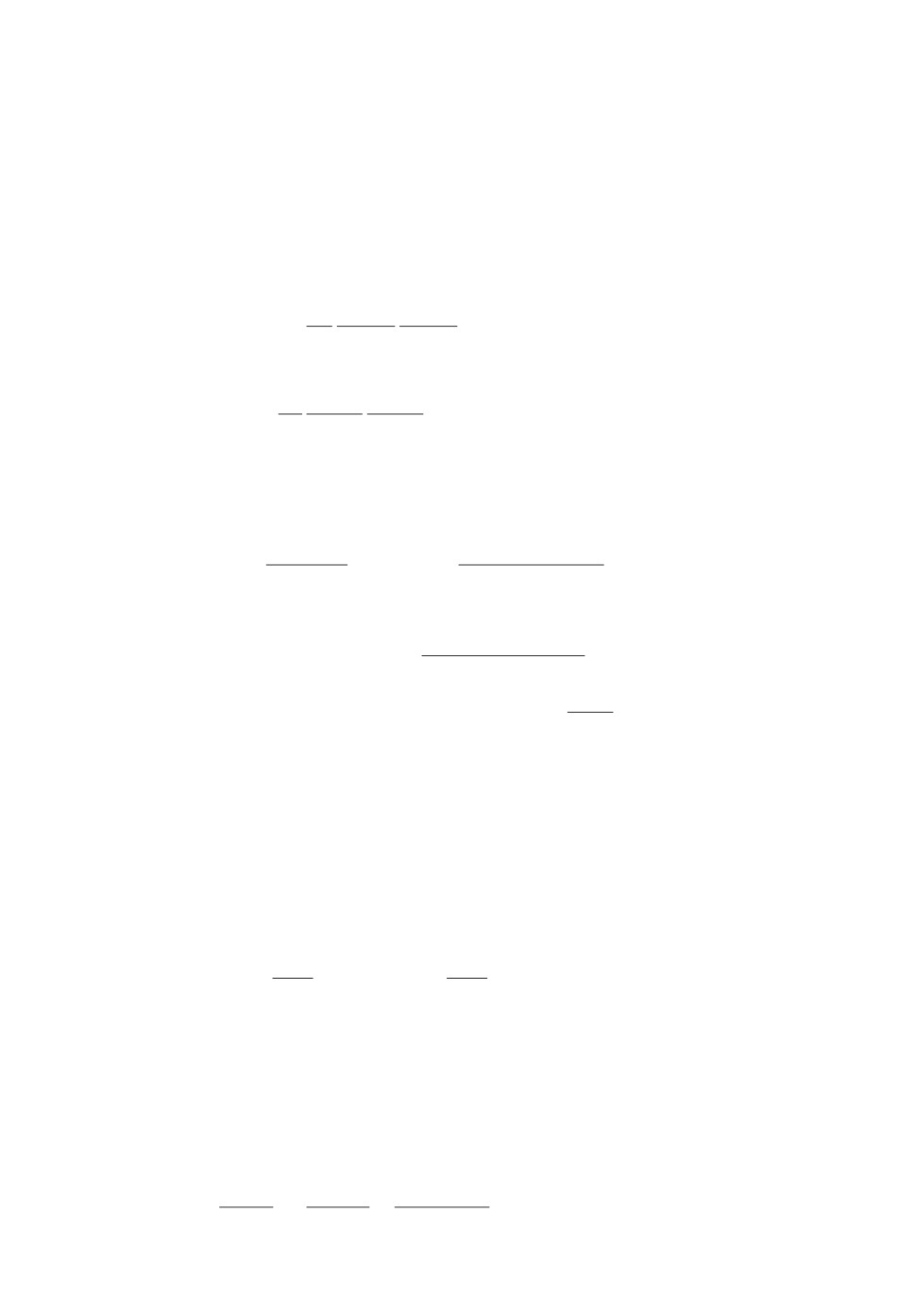
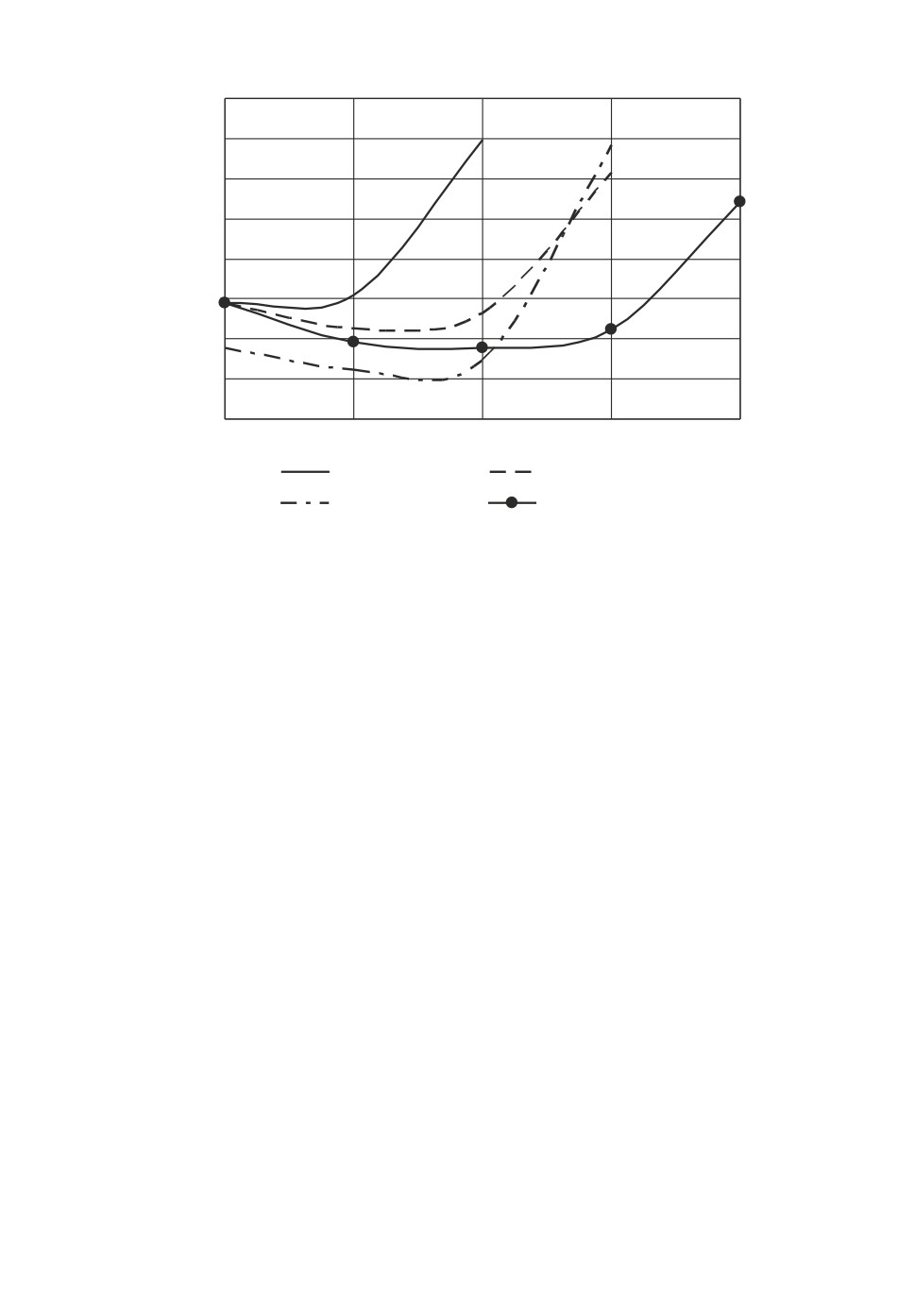
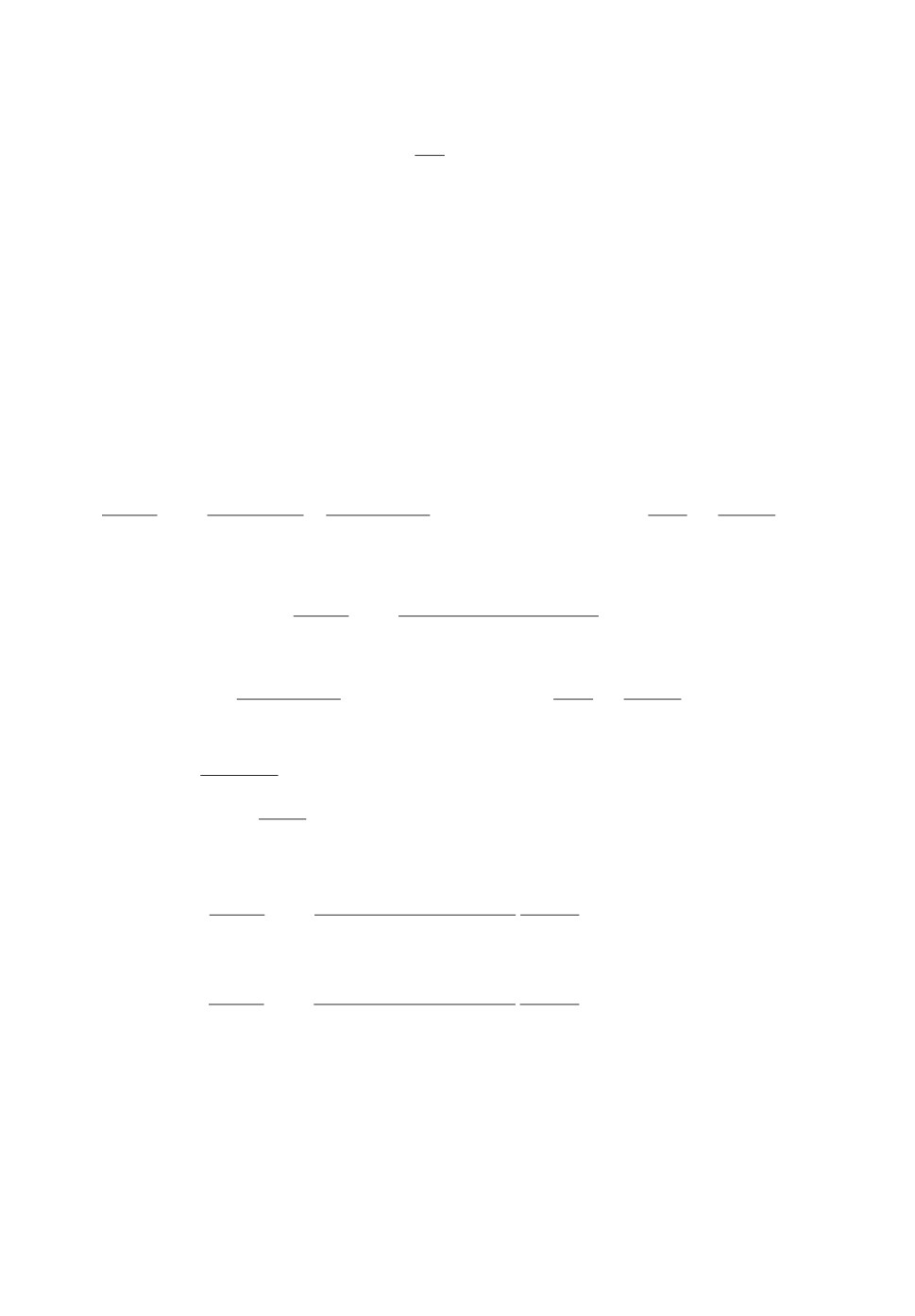
Исследуем характер функции
1
1
ψr (ũ,β,m) =
=
(ũ+2)(2-β)
1+ϕr-1
1+ψr-1
(ψr-1 ũ+1-m)2
в более широком по сравнению с вышеопределенным диапазоне значений
-5 ≤ ũ ≤ -1. Значение r практически не влияет на величину ψr (отклоне-
ние ψr от ψr-1 не превышает 1%), поэтому на рис. 2 показаны виды функции
ψr (ũ,β,m) при r = 1. Анализ рис. 2 показывает, что ψr ≈ 1, т.е. ϕr ≈ 0, что
подтверждает несущественное влияние производных предположительных ва-
риаций (6d) на точность формул (6а) в случаях r > 2, поскольку (как пока-
зано в доказательстве утверждения 1) параметр ϕr приближенно выражает
сумму производных предположительных вариаций; причем чем больше m,
тем меньше проявляется это влияние.
114
Рис. 1. Виды функции ui (Qi).
y
1,1
1,0
0,9
0,8
0,7
2
3
4
5
m
b = 0,8, u~ = -1
b = 0,7, u~ = -1
b = 1,1, u~ = -2,8
b = 1,2, u~ = -2,8
b = 0,8, u~ = -1,8
b = 0,7, u~ = -1,8
b = 1,1, u~ = -5
b = 1,2, u~ = -5
Рис. 2. Виды функции ψr (ũ, β, m).
115
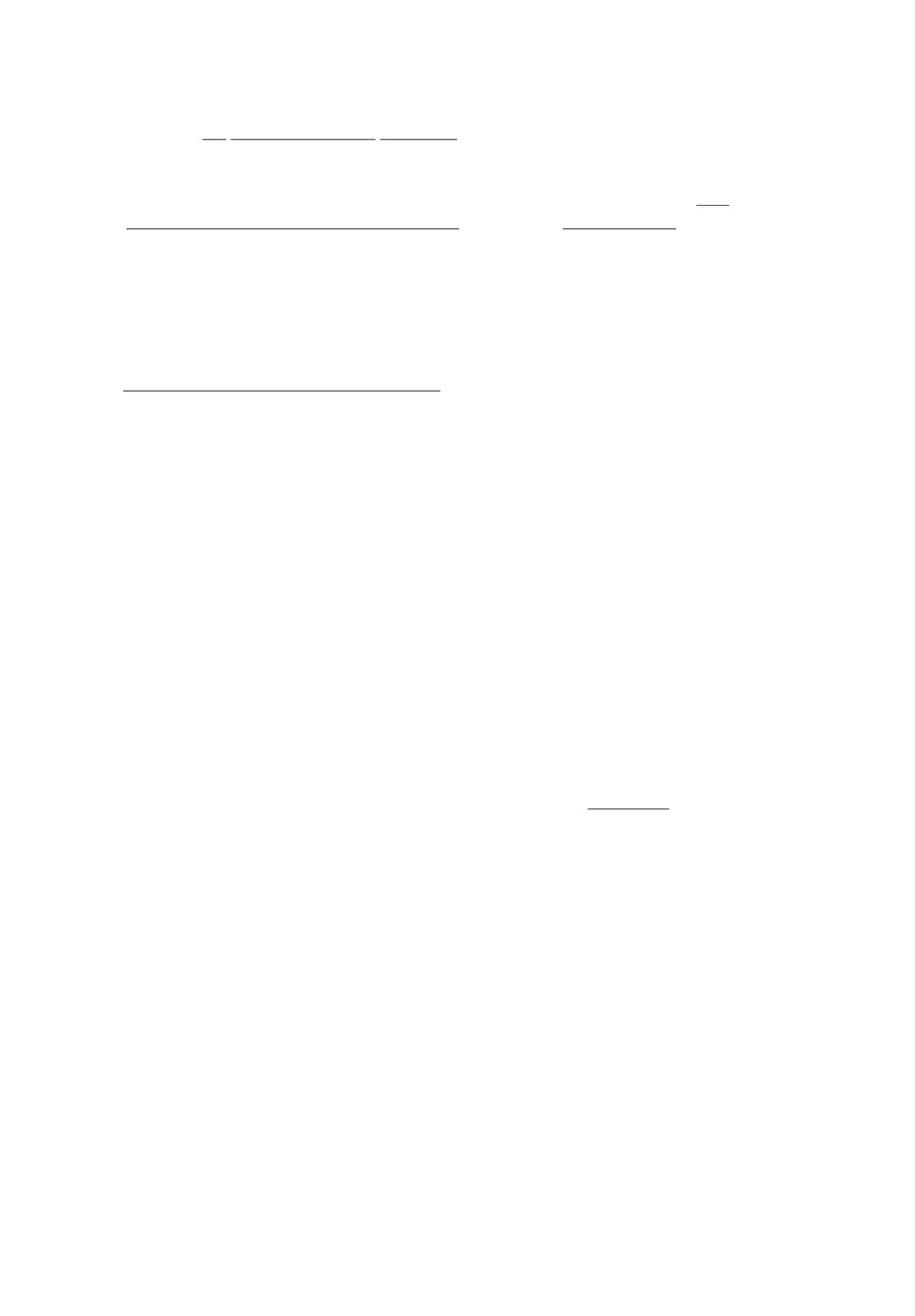
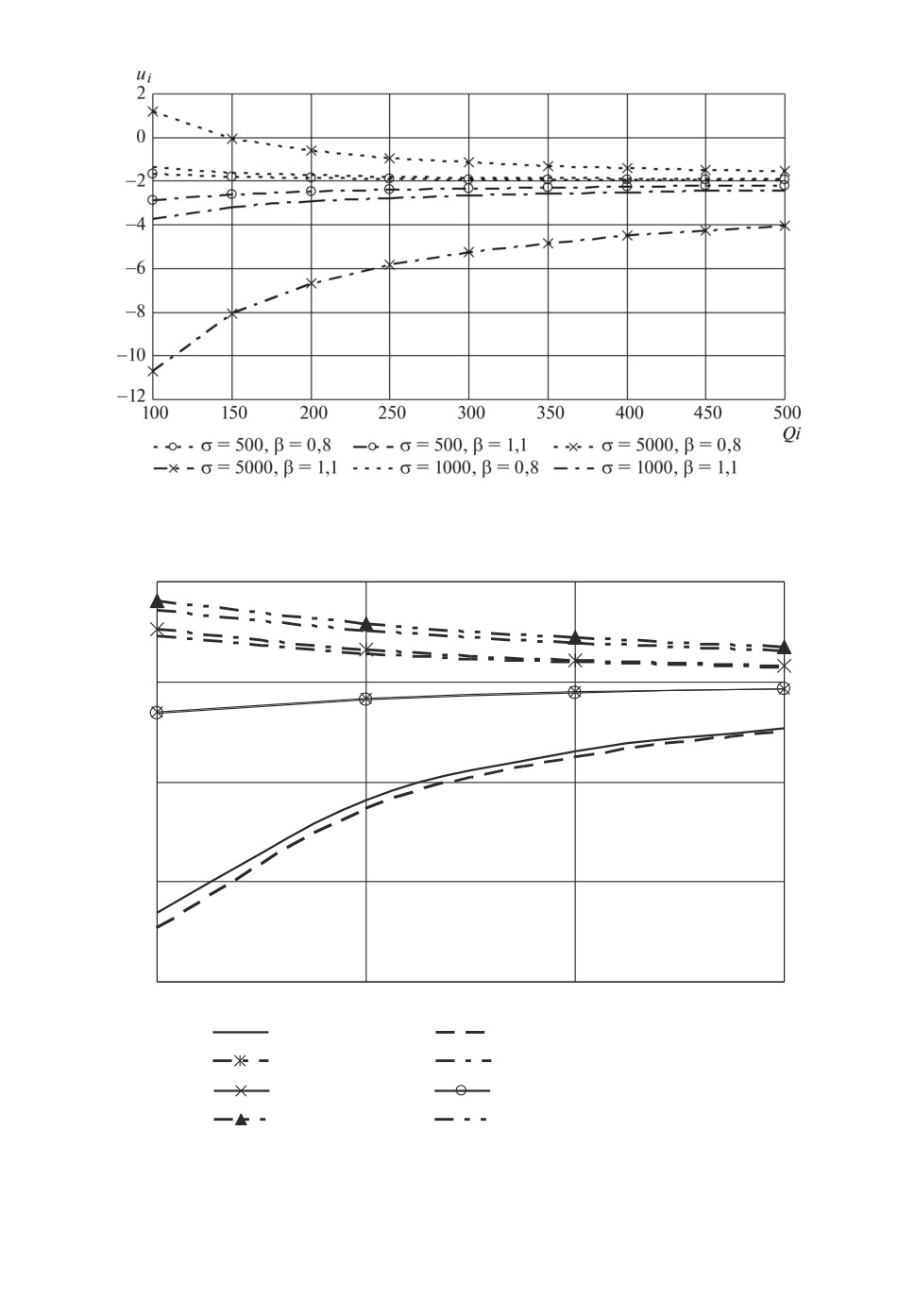
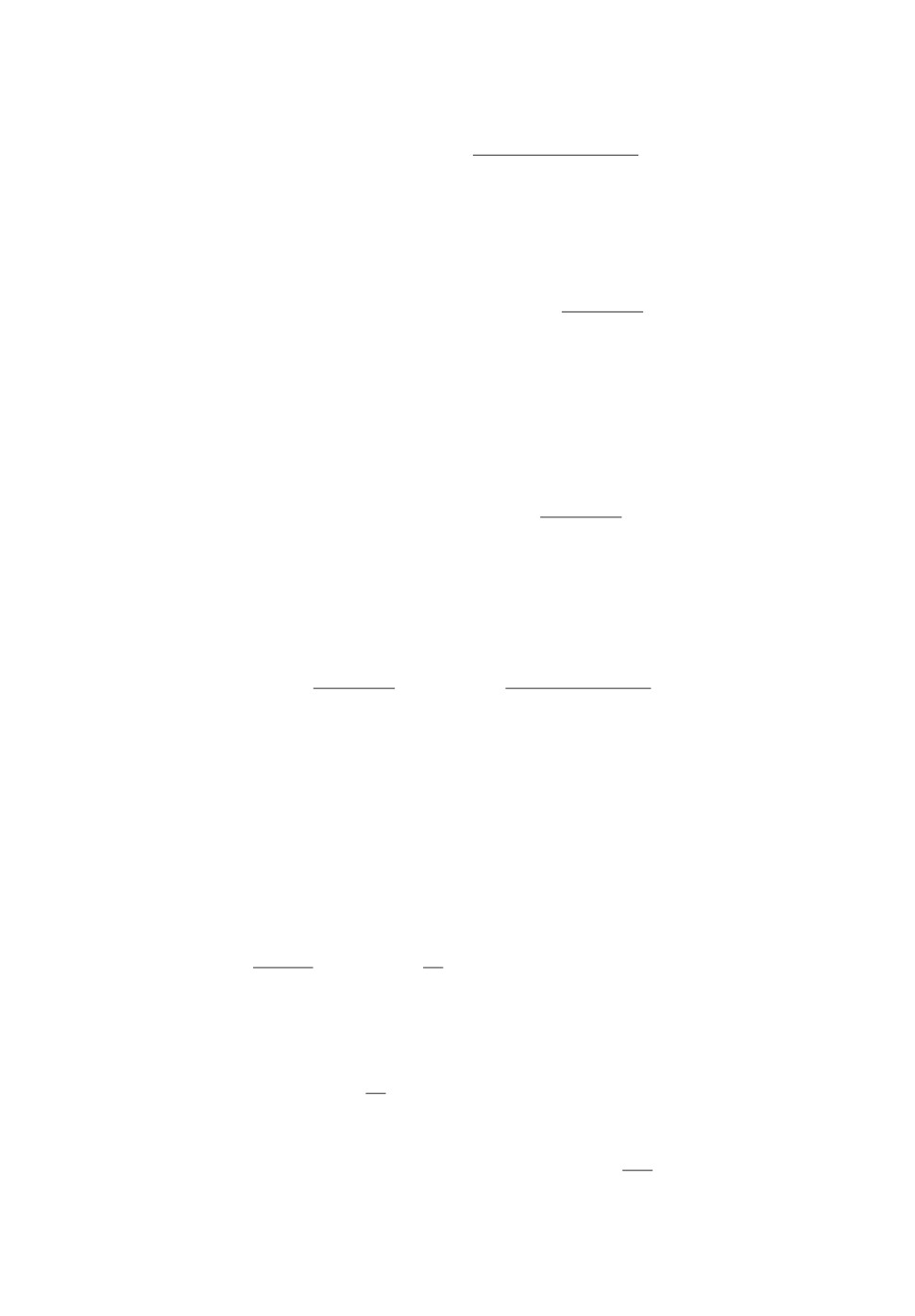
Рис. 3. Зависимость суммы предположительных вариаций от уровня лидер-
ства и количества агентов при uj = -1,8.
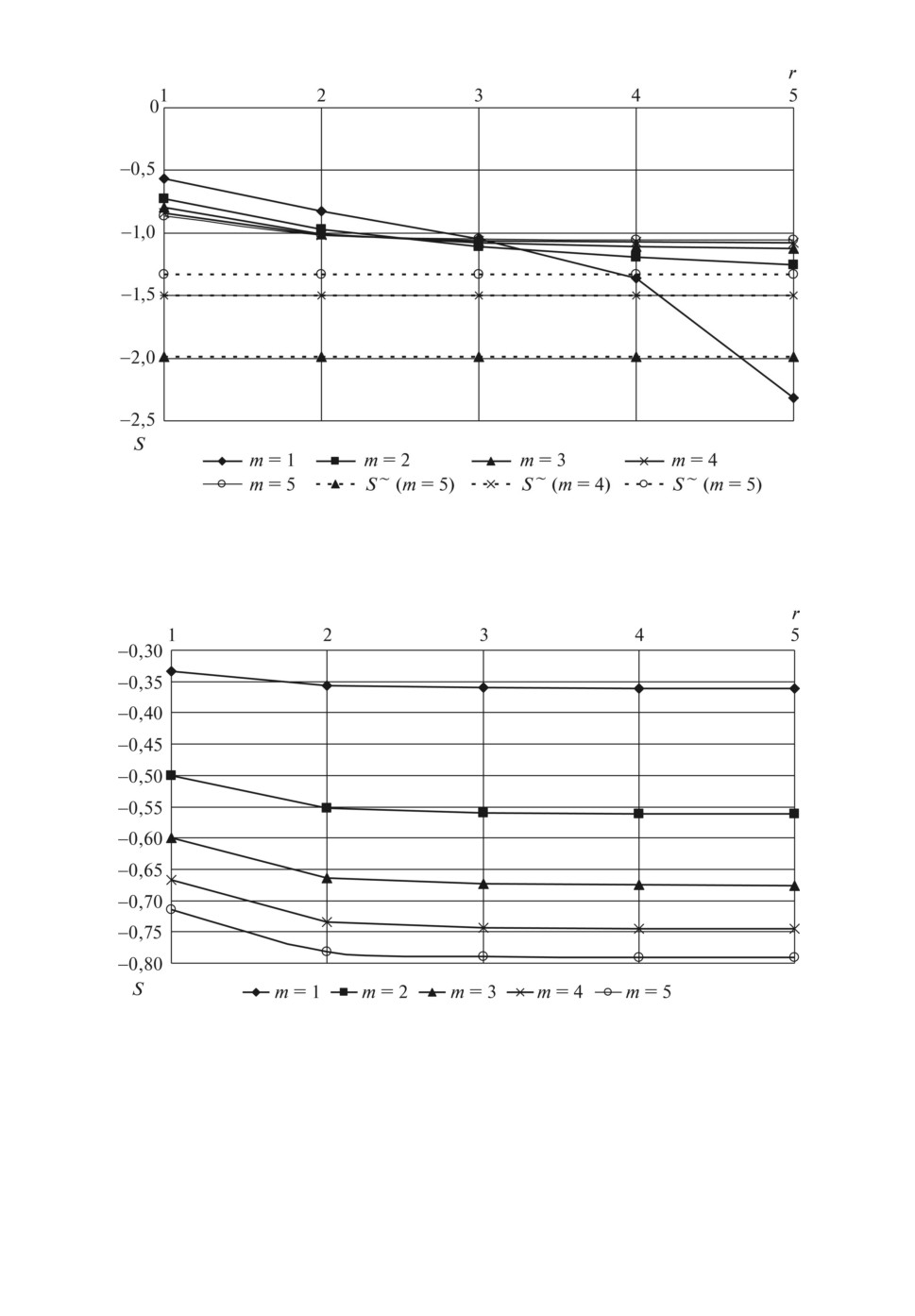
Рис. 4. Зависимость суммы предположительных вариаций от уровня лидер-
ства и количества агентов при uj = -1,8.
{
< 1 ∀β ∈ (0,1),
Также из рис. 2 следует, что ψr
т.е. тип эффекта рас-
> 1 ∀β ∈ (1,2),
ширения масштаба сказывается на знаках предположительных вариаций, за-
висящих от параметров zrj, не только через значение параметра ui, но и в
результате различных значений ψr.
116
Таблица 2. Анализ предположительных вариаций
Параметры окружения 4-го агента
Тип ситуации
x43
z1
z2
z3
1
0,8
0,6
0,5
-0,511
2
-0,8
-0,6
-0,5
-0,338
3
-0,8
0,6
0,5
-1,412
4
-0,8
-0,6
0,5
1,043
5
-1,8
-0,6
0,5
1,636
На рис. 3, 4 проведен анализ формулы (7а) суммы предположительных ва-
риаций агента и ограничения (7с) в зависимости от уровня лидерства и коли-
чества агентов для двух характерных случаев: 1) случай |uj | ∈ [1, 2) ∀βj < 1
рассмотрен на рис. 3 на примере uj = -1,8 ∀j ∈ N при ψr = 0,98; 2) случай
|uj| ≥ 2 ∀βj ≥ 1 показан на рис. 4 на примере uj = -3 ∀j ∈ N, поскольку при
uj < -3 зависимость Sri от r не проявляется, при ψr = 1,05. Предельная ве-
личина суммы предположительных вариаций в (7с) обозначена символом S∼.
Графики (рис. 3, 4) показывают, что с увеличением уровня лидерства r мо-
дуль суммы предположительных вариаций растет, а величина Sri имеет отри-
цательный знак согласно (7b), и подтверждают, что в случае |uj| ∈ [1, 2) огра-
ничение |Sri| < S∼ =mm-1-υr выполняется при m ≥ 2, а для случая |uj | ≥ 2
ограничение |Sri| ≤ 1 ∀r выполняется при m ≥ 1.
Пример типичного и атипичного агентов представлен в табл. 2 для систе-
мы четырех агентов: в ситуациях 1-3 четвертый агент является типичным,
т.е. x43 < 0, поскольку в ситуации 1 zj > 0, j = 1, 2, 3, в ситуации 2 zj < 0,
j = 1,2,3, в ситуации 3 сумма положительных z2,z3 больше модуля z1; в
ситуациях 4, 5 четвертый агент является атипичным, т.е. x43 > 0, так как
модуль суммы отрицательных z1, z2 больше z3, причем с ростом этого превы-
шения значение x43 увеличивается.
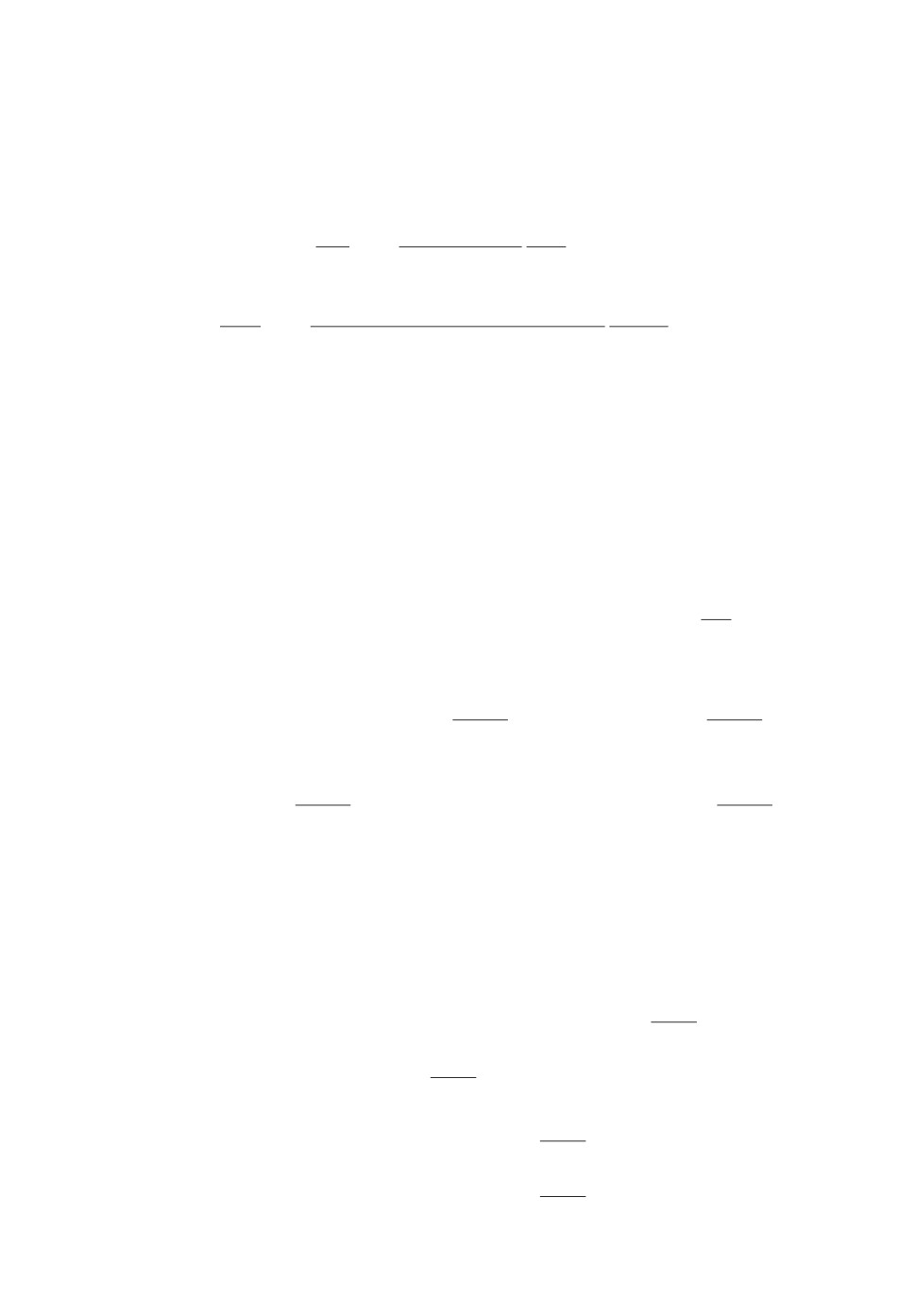
Проанализируем погрешность вычислений предположительных вариа-
ций по формулам (6а) при r > 2 на основе модели (6е). С целью ана-
лиза влияния на погрешность ключевых факторов рассмотрим упрощен-
Q≥ Qi
ную ситуацию при одинаковых значениях действий всех агентов
∀i ∈ N, т.е. при равных значениях ui = u ∀i ∈ N, при одинаковых значени-
ях сумм предположительных вариаций, равных S, т.е. Sr-1i = S ∀i ∈ N, а
также при ψr = 1, т.е. ϕr-1 = 0. Рассчитаем определители Δr-1l, Δr-1li при
uj = ε - 2, в этом случае zrj = ε - S - 1, поэтому Δril = (ε - S - 1)m-1, Δri =
(βi-2)
ε-S-1
= (ε - S - 1)m-1 (ε - S - 1 - m), тогда ε = maxε
, где мак-
ε-1
(ε-S-1-m)2
i∈M
симум имеет место пр
β = minβi. Число обусловленности матрицы A при
i∈N
одинаковых значениях u, S составляет µ =|u-S|+(m-1)(1+ε)|u-S|-(m-1)(1+¯ε) соответственно,
(m-1)ε
µ=
. Норма относительной погрешности (6е) в этом случае
|u-S|+(m-1)(1-ε)
(
)
ε
ограничена величиной δmax =µ
+µ . Пр
β = 0,7 и ε = 0,01 моде-
1-µµ
1-ε
лирование зависимости δmax от числа агентов окружения m, величины u и
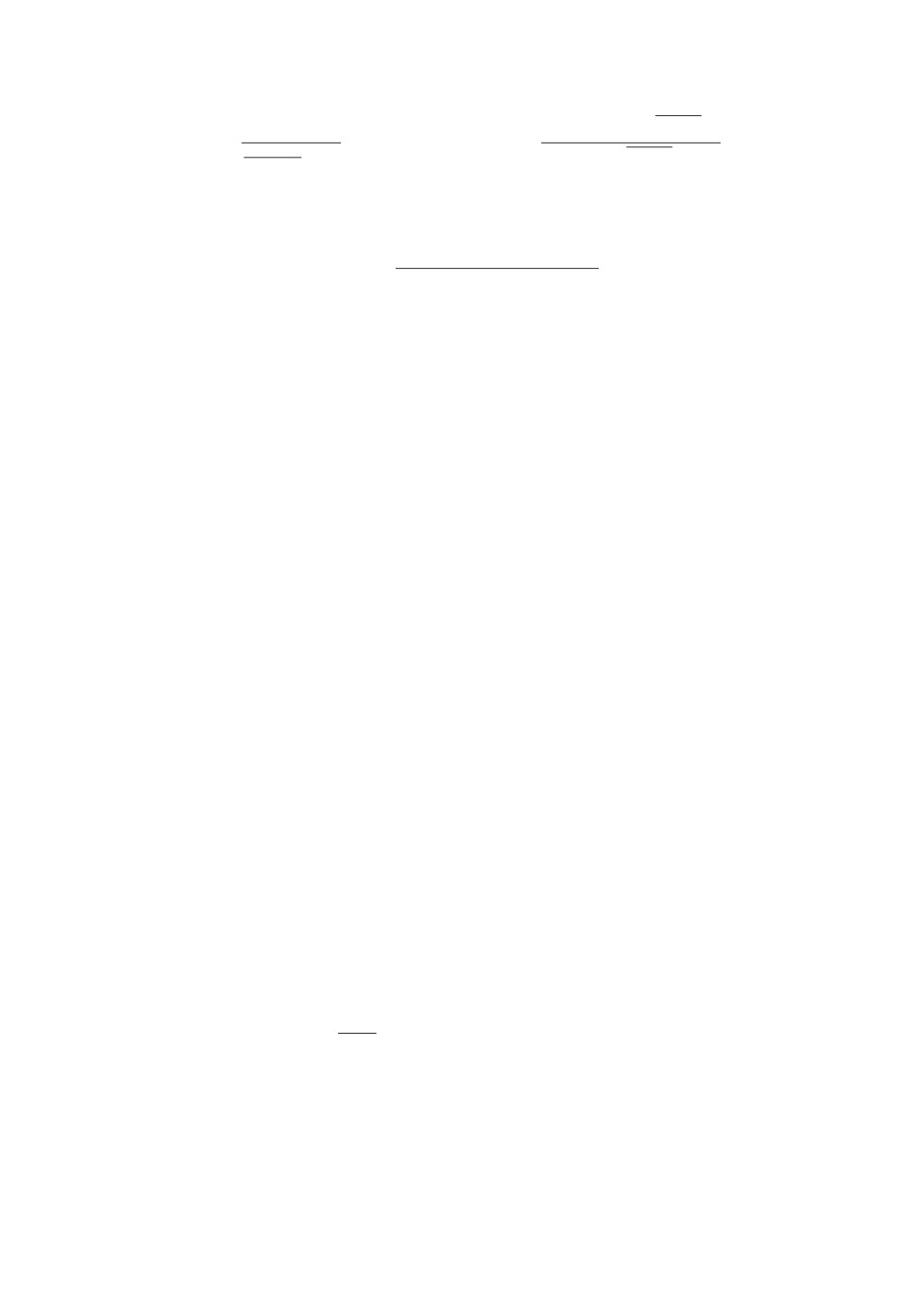
суммы предположительных вариаций S представлено на рис. 5.
117
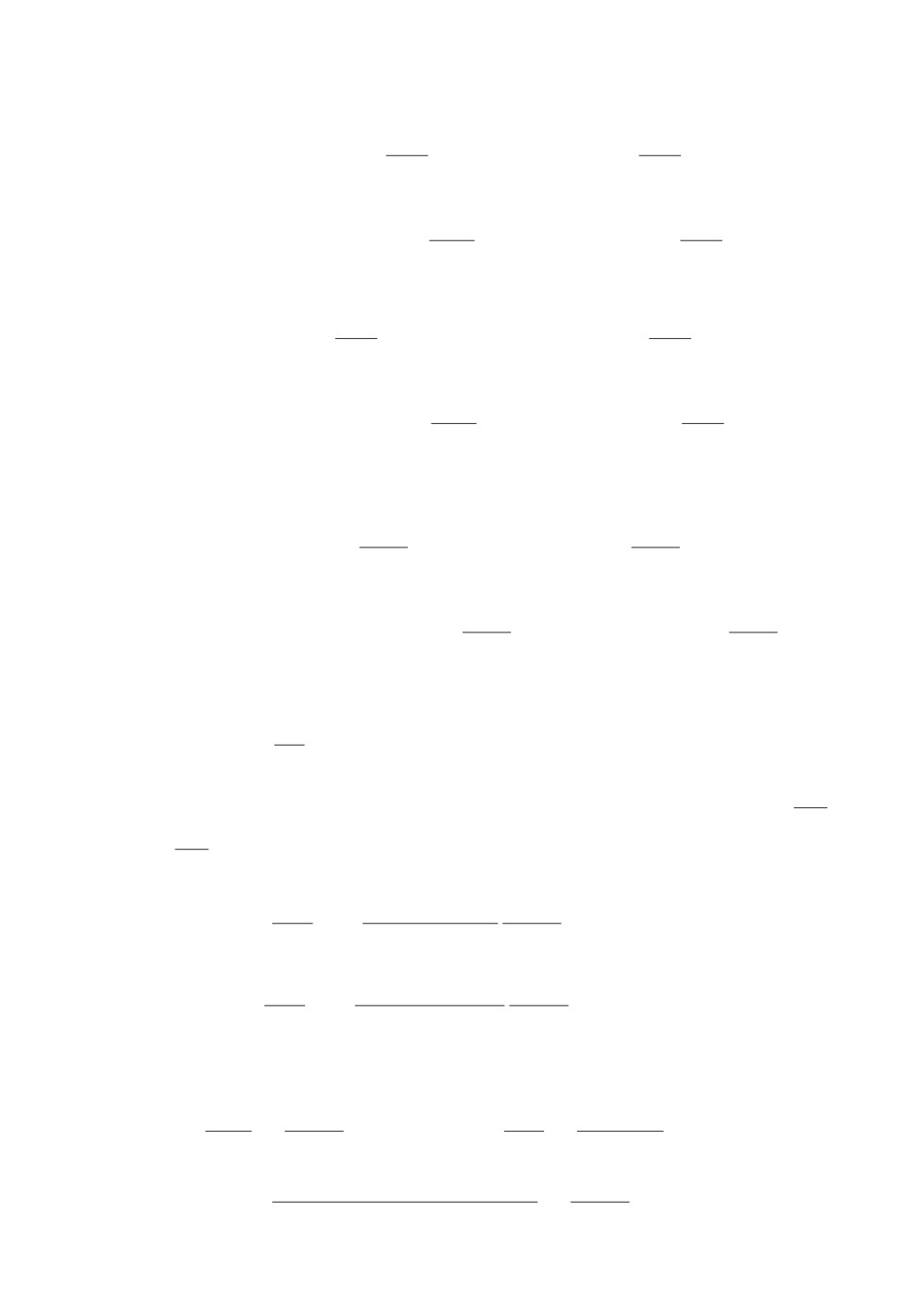
dmax
0,008
0,007
0,006
0,005
0,004
0,003
0,002
0,001
0
1
2
3
4
5
m
S = -0,5, u = -3
S = -0,8, u = -4
S = -0,5, u = -4
S = -0,5, u = -5
Рис. 5. Зависимость точности приближенного вычисления предположитель-
ных вариаций от числа агентов m, величины u и суммы предположительных
вариаций S.
Анализ рис. 5 показывает, во-первых, удовлетворительную точность (по-
грешность менее 1%) приближенных вычислений предположительных вариа-
ций по формулам (6а) при r > 2; во-вторых, рост погрешности начиная с
некоторого значения m, снижение погрешности при увеличении модуля u и
модуля S; в-третьих, границы применимости формулы числа обусловленно-
сти в зависимости от модуля u (на рисунке линии прерваны начиная с такого
значения m, при котором формула некорректна, так как матрица системы
теряет свойство строгого диагонального преобладания [23]).
5. Заключение
В нелинейной модели олигополии нахождение предположительных вариа-
ций представляет собой достаточно сложную вычислительную задачу, поэто-
му первым результатом статьи является устранение этой технической слож-
ности. Наряду с этим получение явной формулы предположительных вариа-
ций позволяет анализировать характер их изменения при вариациях действий
агентов, что необходимо для вычисления равновесий при наличии лидеров по
Штакельбергу второго и более высоких уровней.
Аналитическая формула суммы предположительных вариаций позволяет
выявить синтетическое влияние действий окружения каждого агента на па-
раметры возможного равновесия в игре при вариациях его действий. Кроме
того, определено ограничение на модуль суммы предположительных вариа-
ций, которое позволяет оценить диапазоны возможных равновесий.
118
Анализ знаков предположительных вариаций показал возможность суще-
ствования в нелинейной игре олигополии агентов, проявляющих нетипичные
свойства: на увеличение действия окружения такие агенты реагируют увели-
чением своего действия. Обобщая результаты статьи, отметим, что предполо-
жительные вариации широко используются [18, 24] в анализе агрегативных
игр, однако отсутствие надежных методов вычисления этих величин и их
производных в случае нелинейных функций полезности агентов препятство-
вало исследованию проблемы многоуровневого лидерства по Штакельбергу.
По сравнению с известными результатами, проведенные исследования позво-
лили сделать следующие выводы.
Предположительные вариации агента олигополии относительно действий
окружения на некотором уровне лидерства зависят от предположительных
вариаций остальных агентов на предыдущем уровне лидерства. Это озна-
чает, что повышение информированности агента является фундаментальной
причиной роста его уровня лидерства.
Реакция агента на действия окружения выражается в увеличении или
уменьшении своего действия (объема выпуска), что количественно характе-
ризуется величиной и знаком суммы предположительных вариаций. Показа-
но, что сумма предположительных вариаций агента олигополии при отрица-
тельном эффекте расширения масштаба агентов окружения отрицательна, а
абсолютная величина ограничена единицей; при положительном эффекте и
высоких уровнях лидерства этот параметр может быть положительным и не
ограниченным в дуополии и триполии.
ПРИЛОЖЕНИЕ
Доказательство утверждения 1. Вектор предположительных ва-
риаций в уравнении реакции i-го агента (далее, i-й вектор вариаций) вычис-
ляется из решения следующей системы [20], записанной по уравнениям (3)
остальных m = n - 1 агентов:
∑
∂Fk ∂Qj
∂Fk
(Π.1)
+
= 0, i ∈ N\k,
∂Qj ∂Qi
∂Q
i
j∈N\i
которая при r = 1 (т.е. если в уравнениях (3) положить x0ij = 0) имеет вид
u1x1i1 - x1i2 - ... - x1im = 1,
-x1i1 + u2x1i2 - ... - x1im = 1,
-x1i1 - x1i2 - ... + umx1im = 1,
или
(Π.2)
(
)
ψ1
u1 - S01
x1i1 - x1i2 - ... - x1im = 1,
(
)
−x1i1 + ψ1
u2 - S02
x1i2 - ... - x1im = 1,
(
)
-x1i1 - x1i2 - ... + ψ1
um - S0m
x1im = 1,
119
где
∑
ψ1 = 1, S0i =
x0il = 0,
l∈M
верхний индекс обозначает r.
Отметим следующее свойство функций ui (•), i ∈ N: из (4) и (5) следует,
что
{
≥ 2 ∀βj ≥ 1,
(Π.3)
uj < 0,
|uj|
⇒ |uj | ≥ 1 ∀βj
∈ (0,2) .
∈ [1, 2) ∀βj < 1
Доказательство формулы (6а) при r = 1 приводится аналогично доказа-
тельству формулы (11) в статье [16], но для системы вида (П.2), в которой
знаки коэффициентов перед членами x1ij, i = j, а также знаки свободных
членов изменены на противоположные, поскольку в отличие от цитируемой
статьи в формуле (1) параметр b > 0. Поэтому при r = 1 получим формулу
m
(uj + 1)
j=1\(l,i)
x1il =
,
∏
∑
∏
(um-1um - 1)
(uj + 1) -
(uj + 1)
j=1\i
γ=1\i j=1\(γ,i)
в которой знаменатель (главный определитель системы (П.2) для i-го вектора
вариаций) обозначим символом Δ1i и представим в виде
∏
∑
∏
Δ1i =
(uj + 1) -
(uj + 1) =
j=1\i
γ=1\i j=1\(γ,i)
∏
(
(
)
)
∑
∏ (
(
)
)
=
ψ1
uj - S0j
+1
-
ψ1
uj - S0j
+1
,
j=1\i
γ=1\i j=1\(γ,i)
а числитель (l-й вспомогательный определитель) обозначим
∏
∏
(
(
)
)
Δ1il =
(uj + 1) =
ψ1
uj - S0j
+1
,
j=1\(i,l)
j=1\(i,l)
где верхний индекс r, т.е.
Δ1il
x1il =
Δ1
i
120
При r = 2 система (П.1) имеет вид
∑
∂x11j
∑
∂x11j
u1 - S1
-Q1
x2
-1 + Q1
x2
-...
1
i1
i2
∂Q1
∂Q2
j∈N\1
j∈N\1
∑
∂x11j
∑
∂x11j
x2
... - 1 + Q1
im
=1+Q1
,
∂Qm
∂Qi
j∈N\1
j∈N\1
∑
∂x12j
∑
∂x12j
-1 + Q2
x2
+u2 - S1
-Q2
x2
-...
i1
2
i2
∂Q1
∂Q2
j∈N\2
j∈N\2
(Π.4)
∑
∂x12j
∑
∂x12j
x2
... - 1 + Q2
im
=1+Q2
,
∂Qm
∂Qi
j∈N\2
j∈N\2
∑
∂x1mj
∑
∂x1mj
x2
x2
-1 + Qm
i1
-1 + Qm
i2
-...
∂Q1
∂Q2
j∈N\m
j∈N\m
∑
∂x1mj
∑
∂x1
x2
... - um - S1m - Qm
=1+Qm
mj .
im
∂Qm
∂Qi
j∈N\m
j∈N\m
На главной диагонали матрицы системы (П.4) под знаком суммы стоят
производные типа∂Qil∂i = 0, i = l, так как в этом случае Δil, Δi не зависят
от Qi. Вне главной диагонали матрицы системы (П.4), а также в столбце
∂x1iη
свободных членов под знаком суммы стоят производные двух типов: а)
,
∂Qζ
∂x1iη
η = ζ, б)
, вычисление которых с учетом (6а) дает:
∂Qη
∂x1iη
Δ1iηΔ1iζ
uζ + 2
=-
(
)
(βζ - 2) ,
2
∂Qζ
Qζ
(uζ + 1)
Δ1i
(
)
(Π.5)
Δ1iη Δ1i + Δ1
∂x1iη
iη
uη + 2
=-
(
)
(βη - 2) ,
2
∂Qη
Qη
(uη + 1)
Δ1i
так как
∂Δ1iη
Δ1iη
∂Δ1i
Δ1i + Δ1iζ
=
u′ζQ
,
η=ζ,
=
u′
,
ζ
ζQζ
∂Qζ
uζ + 1
∂Qζ
uζ + 1
βζ-3
Bζβζ (βζ - 1) (βζ - 2) Qζ
uζ + 2
u′ζQ
=
=
(βζ - 2) .
ζ
b
Qζ
121
Введем вектор-столбец переменных системы (П.4) xri = {xri1, xri2, . . . , xrim},
вектор-столбец свободных членов Br = {bri1, bri2, . . . , brim} и матрицу системы{}
Ar = arlj,l,j ∈ M
, где верхний индекс r обозначает уровень лидерства. Из
(П.5) следует, что система (П.4) при r = 2 имеет вид матричного уравнения
(Π.6)
A2xri = B2,
коэффициенты которого вычисляются по формулам
(
)
a2lj = uj - S1j ∀l = j, a2lj = -
1 + ϕ1lj (Q)
∀l = j,
(Π.7)
b2l = 1 + ϕ1li (Q), l,j ∈ M,
где
[
]
Ql uj + 2
βj - 2
∑
ϕ1lj (Q) = -
(
)2 Δlj Δl +
Δ1
,
lk
Qj uj + 1
Δ1
l
k∈M
[
]
∑
Ql ui + 2
βi - 2
ϕ1li (Q) = -
(
)2 Δli Δl +
Δ1
lk
Qi ui + 1
Δ1
l
k∈M
Например, при m = 2 эта система имеет вид
[
]
(
)
Q1 u2 + 2
β2 - 2
(
)
u1 - S11
x2i1 - 1-
(
)2 Δ12
Δ11 + Δ112 + Δ113
x2i2 =
Q2 u2 + 1
Δ1
1
Q1 u3 + 2
β3 - 2
(
)
=1-
(
)2 Δ13
Δ11 + Δ112 + Δ113
,
Q3 u3 + 1
Δ1
1
[
]
Q2 u1 + 2
β1 - 2
(
)
(
)
- 1-
(
)2 Δ21
Δ12 + Δ121 + Δ123
x2i1 +
u2 - S12
x2i2 =
Q1 u1 + 1
Δ1
2
Q2 u3 + 2
β3 - 2
(
)
=1-
(
)2 Δ23
Δ12 + Δ121 + Δ123
Q3 u3 + 1
Δ1
2
При условии (6с) в точке Qi =Q, i ∈ N можно записать ui = ũ (где ũ =
β-2
β
β-1)Q
= -2 -
), значит, в коэффициентах (П.7) параметр ϕ1lj (Q) одина-
b
ковый для всех уравнений системы (П.6) и равен
(
)
(ũ + 2)
β-2
ϕ1lj (Q) = ϕ1 = -
,
l,j ∈ M,
(ũ + 1 - m)2
поскольку в этом случае Δ1il = (ũ + 1)m-1, Δ1i = (ũ + 1)m-1 (ũ + 1 - m). По-
этому формулы коэффициентов (П.7) можно записать в виде
(
)
1
a2lj = ψ2
uj -S1j
∀l = j, a2lj = -1 ∀l = j, b2l = 1, l,j ∈ M, ψ2 =
1+ϕ1
122
Система (П.6) с этими коэффициентами аналогична (П.2), поэтому решение
имеет вид
Δ2il
x2il =
,
l,j ∈ M,
Δ2
i
где
∏
(
(
)
)
∑
∏ (
(
)
)
Δ2i =
ψ2
uj - S1j
+1
-
ψ2
uj - S1j
+1
,
j=1/i
γ=1\i j=1\(γ,i)
∏
(
(
)
)
Δ2il =
ψ2
uj - S1j
+1
j=1\(i,l)
Применим формализм математической индукции. При (r - 1) производ-
ные вида (П.5), вычисленные от предположительных вариаций на (r - 2)-м
уровне лидерства, имеют вид
(
)
(
)
∂ψr-2
Q
(
)
∂xr-2iη
Δr-2iηΔr-2iζ
∂uζ
∂Sr-3ζ
=-
uζ - Sr-3
+ψr-2
-
,
(
)2
ζ
∂Qζ
∂Qζ
∂Qζ
∂Qζ
Δr-2i
(
)
∂xr-2iη
Δr-2iη Δr-2i + Δr-2
iη
=-
(
)2
×
∂Qη
Δr-2
i
(
)
(
)
∂ψr-2
Q
(
)
∂uη
∂Sr-3η
.
×
uη - Sr-3η
+ψr-2
-
∂Qη
∂Qη
∂Qη
Поскольку∂ψr-2(Q) = 0, ζ ∈ M, так как производные вычислены в точке∂Q
ζ
r-3
Qi =Q, i ∈ N, и∂Sζ
= 0, так как при вычислении вариаций на (r - 2)-м
∂Qζ
уровне величина Sr-3ζ является константой, из этих формул следует, что
∂xr-2iη
Δr-2iηΔr-2iζ
uζ + 2
=-
(
)
(βζ - 2) ψr-2,
2
∂Qζ
Qζ
(ψr-2uζ + 1)
Δr-2i
(Π.8)
(
)
Δr-2iη Δr-2i + Δr-2
∂xr-2iη
iη
uη + 2
=-
(
)
(βη - 2) ψr-2.
2
∂Qη
Qη
(ψr-2uη + 1)
Δr-2i
Следовательно, для матричного уравнения
(Π.9)
Ar-1xr-1i = Br-1
коэффициенты вычисляются по формулам, аналогичным формулам (П.7),
(
)
ar-1lj = uj - Sr-2j ∀l = j, ar-1lj = -
1 + ϕr-2lj(Q)
∀l = j,
br-1l = 1 + ϕr-2li (Q) , l,j ∈ M,
123
и параметр ϕr-2lj (Q) равен
(
)
(ũ + 2)
β-2
(Π.10)
ϕr-2lj (Q) = ϕr-2 = -ψr-2
,
l,j ∈ M.
(ψr-2ũ + 1 - m)2
Поэтому коэффициенты системы (П.9) можно записать в виде
(
)
ar-1lj = ψr-1 uj - Sr-2
∀l = j, ar-1lj = -1 ∀l = j,
j
(Π.11)
1
br-1l = 1, l,j ∈ M, ψr-1 =
1+ϕr-2
По индукции из формул (П.9), (П.11) следует, что для произвольного зна-
чения r система (П.1) имеет вид Arxri = Br с коэффициентами, аналогичны-
ми (П.11), т.е.
(
)
arlj = ψr uj - Sr-1
∀l = j, arlj = -1 ∀l = j,
j
(П.11а)
1
brl = 1, l,j ∈ M, ψr =
1+ϕr-1
Поэтому решение этой системы имеет такую же форму, как решение систе-
мы (П.2), но параметр ψr по индукции из формул (П.10), (П.11), вычисляется
по формуле
(
)
(ũ + 2)
2
β
1
(Π.12)
ψr =
,
ϕr = ψr
1+ϕr-1
(ψr ũ + 1 - m)2
(
)
Поскольку (ũ + 2)
2
β
≪(ũ+1-m)2 ∀m ≥ 2 ∧ |ũ| ≥ 1, то ϕr ≈0, ψr ≈1,
что является основанием слабого влияния производных предположительных
вариаций (6d) на точность формул (6а) при r > 2.
Существование решения системы Arxri = Br не зависит от существования
решения системы (3) и определяется по теореме Крамера [21]: система име-
ет единственное решение, если главный определитель Δri = 0. Из формулы
главного определителя следует, что
∑
Δri
1
∑
=1-
при zrj = 0 ∀j ∈ M,
r
zr
z
j
j∈M
j
j∈M
поэтому условие существования решения системы Arxri = Br имеет вид
∑
1
= 1 ∧ zrj = 0 ∀j ∈ M.
zrj
j∈M
Докажем условие (6d): из формул (6а) следует, что∂xil = 0, i = l, так как∂Q
i
в этом случае Δril, Δri не зависят от Qi. Вторая часть условия (6d) дока-
зывается следующим образом. При больших значениях действий, т.е. при
124
Qζ → ∞, когда lim
uζ = -2, определители Δri, Δriζ
суть конечные чис-
Qζ→∞
ла, вычисляемые по формулам Δri = (λr)m-1 (λr - m), Δriζ = (λr)m-1, где
(
)
r-1
λr = ψr
-2 - Sr-1
+ 1, поскольку модуль величины Sζ
ограничен неко-
ζ
торым конечным числом, как будет показано в утверждении 2. В этом случае
согласно формулам (П.8) производные предположительных вариаций по дей-
∂xriη
ψrΔriηΔriζ
uζ+2
ствиям других агентов
=-
(βζ - 2) имеют вид
∂Qζ
Qζ
(ψruζ+1)(Δri
)2
m-1
∂xriη
ψr (λr)m-1 (λr)
uζ + 2
lim
=-
[
]
(βζ - 2) .
2
Qζ→∞ ∂Qζ
Qζ
(ψruζ + 1) (λr)m-1 (λr - m)
При конечных значениях ψr и Qζ → ∞ (т.е. uζ → -2) этот предел равен нулю.
Рассмотрим проблему оценки точности вычисления предположительных
вариаций по формулам (6а) при r > 2. Пусть решение точной системы{}
αrXri = βr обозначено вектором Xri = Xrij,j ∈ N , решение приближенной
{
}
системы (αr + δαr) xri = βr + δβr
вектором xri = xrij, j ∈ N
, отклоне-
ние матрицы точной системы от матрицы приближенной системы симво-
лом δαr, отклонение вектора свободных членов символом δβr. Например,
при m = 2, i = 3 точная система (как следует из (П.4) с учетом∂xil = 0, i = l)∂Q
i
и приближенная система имеют вид
[
]
∑
∂xr-11j
∑
∂xr-11j
u1 - Sr-11
xr
-1 + Q1
xr
=1+Q1
,
i1
i2
∂Q2
∂Q3
j∈N\1
j∈N\1
∑
∂xr-12j
[
]
∑
∂xr-12j
-1 + Q2
xr
+
u2 - Sr-12
xr
=1+Q2
,
i1
i2
∂Q1
∂Q3
j∈N\2
j∈N\2
(
)
(
)
u1 - Sr-11
xri1 -
1+ϕr-1
xri2 = 1 + ϕr-1,
(
)
(
)
−
1+ϕr-1
xri1 +
u2 - Sr-12
xri2 = 1 + ϕr-1.
Поэтому матрица δαr и вектор δβrв данном случае следующие:
∑
∂xr-11j
0
ϕr-1 - Q1
∂Q2
j∈N\1
δαr =
∑
∂xr-12j
,
ϕr-1 - Q2
0
∂Q1
j∈N\2
∑
∂xr-11j
ϕr-1 - Q1
∂Q3
j∈N\1
δβr =
∑
∂xr-12j
.
ϕr-1 - Q2
∂Q3
j∈N\2
125
Погрешность приближения δxri = xri - Xri оценивается по норме вектора, и
относительная погрешность вычисляется по следующей формуле [22]:
)
∥δxri∥
µ (αr)
( ∥δβr∥
∥δαr∥
≤
+
∥xri∥
∥βr∥
∥αr∥
1 - µ(αr) ∥δαr∥
∥αr ∥
∥δαr∥
при µ (αr)
<1
и
∥αr∥ = 0,
∥αr∥
1
где символом ∥•∥ обозначена норма, символом µ (αr) = ∥αr∥(αr)-
обо-
значено число обусловленности матрицы αr. Для вычисления нормы матри-
∑m
цы α = {αij , i, j = 1, . . . , m} используем формулу ∥α∥ = max
|αij|. При
j=1
1≤i≤m
больших действиях в силу свойства (6d) матрица αr имеет строгое диагональ-
ное преобладание, т.е. для каждой строки диагональный элемент ui - Sr-1i по
∑m
модулю больше суммы модулей остальных элементов, или |αii| >
|αij|,
j=1\i
∀i = 1,... ,m. В этом случае число обусловленности матрицы αr имеет [23]
∑
m
max|αii|+
|αij |
j=1\i
i
следующую оценку: µ (αr) <
∑m
min|αii|-
|αij |
i
j=1\i
Пусть при Qi ≥ Qi в элементах вне главной диагонали матрицы αr и
в элементах вектора βr второе слагаемое не превышает по модулю мало-
го числа
ε∈ (0,1), т.е. эти элементы не превышают величины 1 + ε, где
(
)
1
Biβi|βi-1|
2-βi
Qi ≥
определено из условия |ui + 2| ≤ ε, и на базе форму-
εb
лы ϕrli (Q) в (П.7) с учетом обобщения в (П.8) получим
[
]
∑
Ql
ε
βi - 2
ε≥
ψr
(
)2 Δr-1
Δr-1l +
Δr-1lk
∀i, l ∈ M.
li
Qi (ψr (ε - 2) + 1)
Δr-1
l
k∈M
В этом случае
max
uj - Sr-1j
+ (m - 1)(1 + ε)
1≤j≤m
∥δβr∥ ≤
ϕr-1 + ε,
µ (αr) <
,
min
uj - Sr-1j
- (m - 1)(1 + ε)
1≤j≤m
ϕr-1+ε
∥δβr∥
∥βr∥ ≥ 1 - ε,
≤
,
∥δαr∥ ≤ (m - 1)ϕr-1 + ε,
∥βr∥
1-ε
∥αr∥ ≥ min
uj - Sr-1j
+ (m - 1)(1 - ε),
1≤j≤m
∥δαr∥
(m - 1)ϕr-1 - ε
≤ µ=
∥αr∥
min
uj - Sr-1j
+ (m - 1)(1 - ε)
1≤j≤m
Тогда погрешность соответствует (6е).
■
(
)
Доказательство утверждения 2. Обозначим zrj
=ψr uj-Sr-1
+ 1.
j
Вначале рассмотрим частный случай m = 1, когда, как следует из (П.2), Sri =
126
1
1
=xr
=
, i, j = 1, 2. При r = 1 по (6а) ψ1 = 1, S0j = 0, зна-
ij
= zrj
−1
ψr(uj-Sr-1j)
чит z1j = uj + 1, поэтому S1i =1u
< 0, так как согласно (П.3) uj < -2 при
j
<1.Приr>1возможны
βj ≥ 1 и -2 < uj < -1 при βj < 1. Значит,
S1i
два случая: 1) zrj < 0, тогда Sri < 0, |Sri| < 1; 2) zrj > 0, тогда из неравен-
(
)
(
)
ства zrj
=ψr uj -Sr-1
+ 1 > 0 следует, что ψr uj - Sr-1
> -1, значит,
j
j
|Sri| > 1; условие Sri < 0 выполняется в случае, если
Sr-1j < |uj|, т.е. при
max i-1
таких r < rmaxi, что
Sr
< |uj|, при этом условии имеется ограничение
j
1
|Sri| <
. Неравенства являются строгими, так как по усло-
max i-1
ψrmax i
uj-Sr
j
виям (6а) zrj = 0.
В общем случае суммирование формул (6а) по всем агентам окружения
i-го агента приводит к формуле
∑
∏
zrj
∑
γ=1\i j=1\(γ,i)
1
Sri =
xril
=
=
,
∏
∑
∏
sri - 1
l∈M
zrj -
zr
j
j=1\i
γ=1\i j=1\(γ,i)
где
1
sri =
∑
,
i∈N.
1
zr
j
j∈M
При r = 1 из (П.3) следует, что z1j = uj + 1 < 0 ∀j ∈ M, поэтому s1i < 0, i ∈ N,
<1,i∈N.
значит, S1i < 0,
S1i
При r = 2 возможны два случая:
1) все z2j < 0 ∀j ∈ M, тогда, аналогично случаю r = 1, имеем: s2i < 0,
S2
<1,i∈N;
S2i < 0,
i
2) существует несколько значений z2j > 0, так что s2i > 0; тогда z2j < 1, по-
<1;следовательно,наибольшеезначениеs2
скольку |ui| ≥ 1,
S1i
> 0 огра-
i
ничено величиной s2i <1m (равенство имеет место, если все z2j = 1, но по усло-
∑
1
< m
виям (6а)j∈Mz
r
= 1), поэтому при m > 1, S2i < 0,
S2i
,i∈N.
j
m-1
При r = 3 во втором случ(, при ана)гичных рассуждениях, имеет место
ограничение 0 < z3j
<1+ψ3
-1 +m
, сле-
m-1
−1
−1
дователно наибольшее значение s3i > 0 ограничено величиной1+υ3m,поэтому
< m
S3i < 0,
S3i
. При r = 4 во втором случае, имеет место ограничение
m(-1-υ3
)
0<z4j
<1+ψ4
-1 +m
=1
m
=1+υ4,υ4
m
,
поэтому
m-1-υ3
-1
-1
1+υ3
1+υ3
S4
< m
< 0,
. При про-
s4i > 0 ограничено величиной1+υ4m,значит,
i
i
m-1-υ4
извольном r, аналогично рассуждая, получим наибольшее по модулю значе-
1
ние Srimax =
1+υr
m
> 0, поэтому |Sri | <mm-1-υr .
-1
= m1+υr-mприυr
-1
m
1+υr-1
127
Ограничение Sri < 0 выполняется в случае m - 1 - υr > 0, откуда следует,
(
)
m
что m > 1
m
, (m - 1)
-1
> ψr; так как υr > 0, то послед-
-1
1+υr-1
1+υr-1
(
)2
m
нее неравенство выполняется, если
-1
> ψr, откуда вытекает, что
1+υr-1
υr-1 <√
- 1; подставим это выражение в формулу υr, получим мак-
1+ ψr
2
симальное значение υmax, при котором Sri < 0: υmax =ψmax(√√ψmax)
, где
m
ψmax
m
ψmax = arg maxψr. Следовательно, |Sri| <
r>1
m-1-υmax
Условие (7е) следует из дифференцирования выражения (7а): поскольку
1
1
-1
-1
sri =
∑
1
∂zrj ,
не зависит от Qi, то∂Qi∂i =0;∂Qij =-
(∑
j∈M zr
(sri -1)2
1
)2 (zrj)2 ∂Qj
j
j∈M zr
j
∂zrj
где производная
∂Qj
= ψr ∂Qj∂j ; поскольку из (7с) следует, что si, а значит, и zj,
2
(sri)
ψr
суть конечные величины, то lim
βj (βj - 1) (βj - 2) Qβj-3j = 0.
Qj→∞ (sri-1)2 b(zrj)2
■
Доказательство утверждения 3. Из формулы (6а) следует, что
m
zrj
j=1\(l,i)
1
xril =
=
=
∏
∑
∏
∑
zrl
zrj
-
zr
zrl - 1 -
j
zr
j
(Π.13)
j=1\i
γ=1\i j=1\(γ,i)
j=1\(l,i)
1
=
(
)
∑
1
zr
1-
-1
l
zr
j
j=1\(l,i)
Например, для случая m = 3, i = 4, l = 3 это выражение имеет вид xr43 =
1
=
(
)
. При r = 1 zrj < 0 ∀j ∈ M, тогда из (П.13) следует, что
1
zr
1-z
r
-1
-1
3
zr
1
2
x1il < 0. При r > 1 возможны следующие случаи:
1) все zrj < 0 ∀j ∈ M, тогда из (П.13) следует, что xril < 0 ∀r ≥ 1;
2) все zrj > 0 ∀j ∈ M, r > 1, тогда из (П.13) следует, что xril < 0 ∀r > 1,
(
)
∑
m
1
так как zr
1-
- 1 < 0, поскольку это равносильно следующем
l
j=1\(l,i) zr
j
∑m
∑m
1
1
неравенствам: 1 -
<1zr
⇒1<
⇒1sr > 1, а из доказа-
j=1\(l,i) zrj
j=1\i zrj
l
i
тельства 2 следует, что sri < 1 при m > 2;
3) существуют zrθ|θ∈Θ > 0 ∧ zrθ|θ∈¯Θ < 0, θ ∈ M, r > 1, тогда из предыду-
(
)
∑
m
1
щего рассуждения следует, что для выполнения zr
1-
-1<0
l
j=1\(l,i) zr
j
∑
∑
1
1
1
1
необходимо, чтобы выполнялось 1 <j∈Θz
r
r
, т.е.
>1+
; в
+ j∈Θ z
srΘ
j
j
|sr¯Θ|
противном случае будет (8с).
■
128
СПИСОК ЛИТЕРАТУРЫ
1.
Nash J. Non-cooperative Games // Ann. Math. 1951. No. 54. P. 286-295.
2.
Cournot A.A. Researches into the Mathematical Principles of the Theory of Wealth.
London: Hafner, 1960. (Original 1838).
3.
Bowley A.L. The Mathematical Groundwork of Economics. Oxford: Oxford Univers.
Press, 1924.
4.
Karmarkar U.S., Rajaram K. Aggregate Production Planning for Process Indus-
tries under Oligopolistic Competition // Eur. J. Oper. Res. 2012. V. 223. No. (3).
P. 680-689.
5.
Ledvina A., Sigar R. Oligopoly Games under Asymmetric Costs and an Application
to Energy Production // Math. Financ. Econom. 2012. V. 6 (4). P. 261-293.
6.
Currarini S., Marini M.A. Sequential Play and Cartel Stability in Сournot
Oligopoly // Appl. Math. Scie. 2013. No. 7 (1-4). Р. 197-200.
7.
Vasin A. Game-theoretic Study of Electricity Market Mechanisms // Procedia Com-
put. Sci. 2014. No. 31. Р. 124-132.
8.
Sun F., Liu B., Hou F., Gui L., Chen J. Cournot Equilibrium in the Mobile Vir-
tual Network Operator Oriented Oligopoly Offloading Market // IEEE Int. Conf.
Commun., ICC 2016. No. 7511340.
9.
Geraskin M. Game-theoretic analysis of Stackelberg oligopoly with arbitrary rank
reflexive behavior of agents // Kybernetes. 2017. V. 46(6). Р. 1052-1067.
10.
Geraskin M. Equilibria in the Stackelberg Oligopoly Reflexive Games with Different
Marginal Costs of Agents // Int. Game Theory Rev. 2019. V. 21. No. 2. Р. 1950002
(1-22).
11.
Naimzada A.K., Sbragia L. Oligopoly Games with Nonlinear Demand and Cost Func-
tions: Two Boundedly Rational Adjustment Processes // Chaos, Solit. Fractal. 2006.
V. 29 (3). P. 707-722.
12.
Askar S., Alnowibet K. Nonlinear Oligopolistic Game with Isoelastic Demand Func-
tion: Rationality and Local Monopolistic Approximation // Chaos, Solit. Fractal.
2016. No. 84. P. 15-22.
13.
Naimzada A., Tramontana F. Two Different Routes to Complex Dynamics in an
Heterogeneous Triopoly Game // J. Differ. Equat. Appl. 2015. V. 21. No. 7. P. 553-
563.
14.
Cavalli F., Naimzada A., Tramontana F. Nonlinear Dynamics and Global Analysis
of a Geterogeneous Cournot Duopoly with a Local Monopolistic Approach Versus a
Gradient Rule with Endogenous Reactivity // Commun. Nonlin. Sci. Numer. Simu-
lat. 2015. No. 23 (1-3). P. 245-262.
15.
Stackelberg H. Market Structure and Equilibrium: 1st Edition. Translation into En-
glish, Bazin, Urch & Hill, Springer, 2011. (Original 1934)
16.
Гераськин М.И., Чхартишвили А.Г. Теоретико-игровые модели рынка олигопо-
лии с нелинейными функциями издержек агентов // АиТ. 2017. № 9. С. 106-130.
Geraskin M.I., Chkhartishvili A.G. Game-Theoretic Models of an Oligopoly Mar-
ket with Nonlinear Agent Cost Functions // Autom. Remote Control. 2017. V. 78.
No. (9). P. 1631-1650.
17.
Corchуn L.C. Comparative statics for aggregative games the strong concavity case //
Math. Social Sci. 1994. V. 28 (3). Р. 151-165.
18.
Possajennikov A. Conjectural variations in aggregative games: An evolutionary per-
spective // Math. Social Sci. 2015. No. 77. Р. 55-61.
129
19. Walters A.A. Production and cost functions: and econometric survey // Economet-
rica. 1963. V. 31. No. 1. Р. 23-44.
20. Гераськин М.И. Моделирование рефлексии в нелинейной модели трехагентной
олигополии Штакельберга для телекоммуникационного рынка России // АиТ.
2018. № 5. С. 83-106.
Geraskin M.I. Modeling Reflexion in the Non-Linear Model of the Stakelberg Three-
Agent Oligopoly for the Russian Telecommunication Market // Autom. Remote Con-
trol. 2018. V. 79. No. 5. Р. 841-859.
21. Korn G., Korn T. Mathematical Handbook for Scientists and Engineers: Defini-
tions, Theorems, and Formulas for Reference and Review. N.Y.: McGraw-Hill Book
Company, 1968.
22. Петров И.Б., Лобанов А.И. Лекции по вычислительной математике. М.:
Интернет-университет Информационных Технологий: БИНОМ 2006. 523 c.
23. Varah J.M. A lower bound for the smallest singular value of a matrix // Linear
Algebra Its Appl. 1975. V. 11(1). P. 3-5.
24. Reddy Rachapalli S., Kulshreshtha P. Evolutionarily stable conjectures and social
optimality in oligopolies // Theoret. Econ. Lett. 2013. V. 3. No. 1. P. 12-18.
Статья представлена к публикации членом редколлегии М.В. Губко.
Поступила в редакцию 23.09.2019
После доработки 25.12.2019
Принята к публикации 30.01.2020
130