Автоматика и телемеханика, № 8, 2020
© 2020 г. С.П. ГОРБИКОВ, д-р физ.-мат. наук(gorby50@yandex.ru)
(Нижегородский государственный архитектурно-строительный университет)
ВСПОМОГАТЕЛЬНЫЕ СКОЛЬЗЯЩИЕ ДВИЖЕНИЯ
ВИБРОУДАРНЫХ СИСТЕМ
В системах управления движением известны режимы с учащающимися
переключениями. Для систем с ударами (своеобразного класса импульс-
ных систем) аналогом этих режимов являются движения с бесконечным
числом ударных взаимодействий за конечное время. Для таких движений
предлагается описание с помощью гладких дифференциальных уравне-
ний. Приводятся примеры применения подобного описания.
Ключевые слова: ударное взаимодействие, локальная особенность, беско-
нечноударные движения, вспомогательные скользящие движения, точеч-
ное отображение.
DOI: 10.31857/S0005231020080061
1. Введение
Ю.И. Неймарк еще в 1953 г. провел уникальное исследование [1], на кото-
рое авторы прикладных работ до сих пор ссылаются. Он выполнил характер-
ное для него теоретическое исследование, которое имело сугубо практическое
значение.
В [1] изучается процесс вибропогружения в случае упругого грунта; от-
крыт новый эффект вибраций: они способны снижать сопротивление при
внедрении в грунт. Результаты действия вибраций на технические системы
описаны в монографии [2]. При изучении виброударных систем (когда к дей-
ствию вибраций добавляются удары) исследователи занимаются:
методами расчета виброударных систем (например, [3, 4 и др.]);
разработкой моделей, методов синтеза и анализа динамики виброударных
систем различного типа (например, [5-7 и др.]).
Более подробное представление о современном состоянии теории вибро-
ударных систем можно получить, например, из [8].
В то же время в теории виброударных систем известны движения, при
которых за конечный промежуток времени траектория бесчисленное число
раз попадает на многообразие разрыва. Это бесконечноударные движения
[9, c. 291; 10; 11], т.е. движения с бесконечным числом ударных взаимодей-
ствий за конечное время.
В [12] предлагается наиболее общая модель динамических систем с удар-
ными взаимодействиями (виброударных систем), включающая в том числе
и системы, используемые в [11]. Для введенных систем (в одном общем слу-
чае) в [12] дается описание бесконечноударных движений с помощью глад-
ких дифференциальных уравнений. Интегральные кривые этих уравнений
получили название вспомогательные скользящие движения. В [13] предла-
гаются гладкие дифференциальные уравнения, описывающие движения ука-
занных систем на границе области существования бесконечноударных дви-
63
жений. В [14] описаны локальные особенности данных динамических систем.
В [15, 16] устанавливается топологическая эквивалентность указанных ло-
кальных особенностей.
В настоящей работе предлагаются гладкие дифференциальные уравнения,
описывающие движения динамических систем с ударными взаимодействия-
ми в окрестности локальной особенности шестого типа [14], т.е. такой точки
на гиперповерхности S = 0 удара, в которой первая и вторая производная
(в силу дифференциальных уравнений движения) от гиперповерхности уда-
ра равна нулю, а третья производная отрицательна (движение системы
происходит в области S ≥ 0). Приводятся примеры применения таких урав-
нений. Даны также примеры использования дифференциальных уравнений,
которые были приведены в [12] и действуют в окрестности локальной особен-
ности четвертого типа, т.е. такой точки на гиперповерхности S = 0, в которой
первая производная (в силу дифференциальных уравнений движения) от ги-
перповерхности удара равна нулю, а вторая производная отрицательна.
При выполнении работы [12] Ю.И. Неймарк предложил идею об описа-
нии бесконечноударных движений с помощью дифференциальных уравне-
ний. Эта идея сразу решала проблему о единственности предельной точки
бесконечноударного движения и кривой, в которой начинаются, продолжа-
ются бесконечноударные движения, заканчивающиеся в выделенной точке.
Оказывается, что эта же идея работает и для локальной особенности пятого
и шестого типа. Идеи Ю.И. Неймарка всегда благотворны и имеют далекое
идущее будущее.
2. Рассматриваемый класс динамических систем
Далее предполагается [12], что мгновенные ударные взаимодействия про-
исходят на гиперповерхности xn = 0, по достижении которой фазовые пере-
менные x1, . . . , xn-1 меняются скачкообразно (переменная xn остается равной
нулю) в соответствии с формулами
(
)
(
)
x1 = H1
x-1,... ,x-n-1
=x-1H11
x-1,... ,x-n-1
,
(1)
(
)
(
)
xi = Hi
x-1,... ,x-n-1
=x-i +x-1H1i
x-1,... ,x-n-1
,
i = 2,n - 1,
а при xn > 0 изменение фазовых переменных подчиняется дифференциаль-
ным уравнениям вида
dxi
= ˙xi = Φi(x1, . . . , xn), i = 1, n - 1,
dt
(2)
dxn
= ˙xn = Φn(x1, . . . , xn) = x1Φn1(x1, . . . , xn) + xnΦnn(x1, . . . , xn).
dt
Фазовое пространство системы составляют точки (x1, . . . , xn-1, xn ≥ 0).
При этом выполняются следующие условия: -1 < H11(0, x-2, . . . , x-n-1) < 0;
H11(x-1,x-2,... ,x-n-1) < 0; Φn1(x1,... ,xn-1,0) > 0; t - время. Здесь функ-
ции H1j , j = 1, n - 1, определены и являются гладкими класса Cm, m ≥ 5, в
малых окрестностях точек (x-1 ≤ 0, x-2, . . . , x-n-1) пространства Rn-1, а функ-
ции Φj , j = 1, n - 1, Φn1, Φnn определены и являются гладкими класса Cm в
малых окрестностях точек (x1, . . . , xn-1, xn ≥ 0) пространства Rn.
64
Следует отметить, что специфический вид уравнений (2) и условие типа
неравенства на функцию Φn1 означает лишь, что на гиперповерхности xn = 0
согласно (2), xn = x1Φn1(x1, . . . , xn-1, 0). Поэтому фазовые траектории систе-
мы (2) при x1 = 0 касаются гиперповерхности xn = 0, при возрастании време-
ни t они выходят из точек (x1 > 0, x2, . . . , xn-1, xn = 0), а при уменьшении t
из точек (x1 < 0, x2, . . . , xn-1, 0).
Указанный вид (1) ударных взаимодействий подразумевает лишь, что при
достижении гиперповерхности xn = 0 фазовой траекторией со скоростью из-
менения последней переменной, равной xn = 0, ударные взаимодействия не
меняют (так как в этот момент x1 = 0) значений фазовых переменных, а усло-
вия в виде неравенств на функцию H11 означают потерю абсолютной величи-
ны скорости изменения переменной xn после ударных взаимодействий. Пере-
менная xn соответствует расстоянию (по нормали) между соударяющимися
телами.
Если какая-то переменная xj не изменяется при ударе, то соответствующая
функция H1j в формулах (1) равна нулю.
Далее на двух задачах показывается, как можно виброударные системы
привести к виду (1)-(2).
Пример 1 (виброударный механизм [17, с. 263]). При изучении движения
простейшего виброударного механизма уравнение движения (под действием
синусоидальной F sin ωt и постоянной P сил) ударной массы M, подвешен-
ной на пружине (коэффициент ее упругости равен k), в промежутках между
ударами (при x < x0) имеет вид
Md2x/dt2 + kx = P + F sin ωt.
При x = x0 происходит мгновенный удар массы M о неподвижный ограни-
читель, в результате чего меняется только скорость движения массы
dx/dt+ = -Rdx/dt-,
0 ≤ R ≤ 1,
где dx/dt- и dx/dt+ - соответственно доударные и послеударные значения
скорости.
Осциллятор с предварительным натягом. При kx0 - P < 0 указанную
выше систему заменой переменных и параметров
k
F
Mω2(x - x0)
t=ωτ-π, λ2 =
,
W =
,
q=
Mω2
P -kx0
kx0 - P
можно привести к следующему виду.
В трехмерном фазовом пространстве переменных q,
˙q = dq/dt, t при q > 0
уравнение движения имеет вид
q+ λ2q = W sint - 1,
q= d2q/dt2, W > 0,
0 < λ.
Если при достижении поверхности q = 0 значение dq/dt =
q=
˙q- < 0, то в
системе происходит мгновенное ударное взаимодействие по формуле
q+ = -Rq-,
где
q- и
˙q+ - соответственно доударные и послеударные значения скорости.
65
Поэтому при x1 =
˙q, x2 = t, x3 = q эта система принимает вид (1)-(2), где
уравнения (1) имеют вид
q+) = x1 = -Rx-1 = (-Rq-),
(t+) = x2 = x-2 = (t-),
а уравнения (2) - вид
x1 = -λ2x3 + W sin x2 - 1,
x2 = 1,
x3 = x1.
Осциллятор с зазором. При kx0 - P > 0 заменой переменных и парамет-
ров
k
F
Mω2(x0 - x)
t=ωτ-π, λ2 =
,
V =
,
q=
Mω2
kx0 - P
kx0 - P
уравнение виброударного механизма можно привести к виду
q+ λ2q = V sint + 1,
q= d2q/dt2, V > 0,
0 < λ,
который справедлив при q > 0. Условия удара в этом случае остаются преж-
ними.
Поэтому при той же самой замене x1 =
˙q, x2 = t, x3 = q система принимает
вид (1)-(2), где уравнения удара (1) остаются прежними, а уравнения (2)
принимают вид
x1 = -λ2x3 + V sin x2 + 1,
x2 = 1,
x3 = x1.
Далее для описания поведения фазовых траекторий вводится точеч-
ное отображение T = T2T1 части многообразия xn = 0, x1 ≥ 0 в себя.
Отображение T1 переводит точку (x1 ≥ 0, x2, . . . , xn-1, 0) в точку (x1 ≤ 0,
x2,... ,xn-1,0) по траекториям системы (2); T2 - отображение, задаваемое
формулами (1) ударных взаимодействий.
В то же время для любой функции Z используются обозначения
Z = Z(x1,...,xn-1), Z(M1) = Z(x1,..., xn-1),
где M1 = T (M) = (x1, . . . , xn-1), M = (x1 ≥ 0, x2, . . . , xn-1).
3. Особенности четвертого типа
Здесь рассматривается четвертый тип [14] локальных особенностей, т.е. та-
кая точка M∗ на гиперповерхности S = 0 удара, в которой первая производ-
ная (в силу дифференциальных уравнений движения) от гиперповерхности
удара равна нулю, а вторая производная отрицательна (движение системы
происходит в области S > 0).
Тогда в точке M∗ выполняются условия
∑
∂Φn
(3)
xn = 0,
xn = Φn(x1,... ,xn) = 0,
xn =
Φk
< 0.
∂xk
k=1
66
Прежде всего в [12] доказывается следующая лемма.
Лемма 3.1. Для любой точки M∗ можно указать при R=-H11(0,x∗2,
...,x∗n-1) = 0 такую малую окрестность на многообразии xn = 0, из каждой
точки которой при x1 > 0 выходит фазовая траектория, соответствующая
бесконечноударному движению. Это движение оканчивается в некоторой
точке многообразия x1 = 0,xn = 0.
Затем доказано следующее утверждение.
Теорема 3.1. Для любой такой точки M∗ существует окрестность на
многообразии xn = 0, из каждой точки M которой при x1 > 0 выходит фа-
зовая траектория, соответствующая бесконечноударному движению. Это
движение оканчивается в некоторой точке многообразия xn = 0, x1 = 0.
При этом все точки Mj = Tj (M), j = 1, 2, 3, . . . , лежат на одной и той же
проходящей через M интегральной кривой (“вспомогательные скользящие
движения”) системы дифференциальных уравнений
dxi
(4)
= fi(x1,... ,xn-1
),
i = 2,n - 1,
dx1
где функции fi ∈ Cm-2.
Для доказательства теоремы находится вид отображения T
x1 = Rx1 + x1ϕ1 = g1,
(5)
xi = xi + x1(ci + ϕi) = gi, i = 2,n - 1,
где
R = -H11(0,x∗2,...,x∗n-1) (0 < R < 1), ci = -bi - 2aia-11,
bi = H1i(0,x∗2,... ,x∗n-1), ϕj(0,x∗2,... ,x∗n-1) = 0, j = 1,n-1, ϕj ∈ Cm-1,
aj = Φj(0,x∗2,... ,x∗n-1,0), j = 1,n - 1.
Функции fi из (4) находятся из тождеств
∑
∑
∂gi
∂gi
∂g1
(6)
+
fj = fi(M1)∂g1 +
fj
,
i = 2,n - 1,
∂x1
∂xj
∂x1
∂xj
j=2
j=2
где fi = ci/(R - 1)
fi и
fi = 0 при M = M∗.
Функциональные уравнения (6) составляются аналогично тому, как и со-
ответствующие уравнения, используемые при доказательстве теоремы в [13].
Для нахождения при достаточно малых x1, xi - x∗i, i = 2, n - 1, решения
уравнения (6) можно указать, используя (5), следующий итерационный про-
цесс:
∑
∂ϕi
∂ϕi
fs+1
= -ci - ϕi - x1
+
fs+
i
j
∂x1
∂xj
j=2
∑
∂ϕ1
∂ϕ1
,i=2,n-1,s=0,1,2,...
+fs
i
(M1)R + ϕ1 + x1
+
fsj
∂x1
∂xj
j=2
67
Доказательство теоремы 3.1 опирается на доказательство сходимости это-
го процесса и гладкости его решения.
Далее приводятся примеры применения полученного описания бесконеч-
ноударных движений.
3.1. Нахождение предельных значений
бесконечноударных движений
Пусть траектория системы
(1)-(2), выходящая из точки M(x1 > 0,
x2,... ,xn-1) многообразия xn = 0, представляет собой бесконечноударное
движение, оканчивающееся в точке M∗(0, x∗2, . . . , x∗n-1) многообразия (3). То-
гда координаты точки M∗ можно найти следующим образом.
Если x1 достаточно мало, то в качестве точки M∗ можно взять точку
(0, x2, . . . , xn-1), и уравнение (4) в силу (6) примет вид
dxi
∂fi(0,x2,... ,xn-1)
= fi(0,x2,... ,xn-1) + x1
+...=
dx1
∂x1
ci(x2,... ,xn-1)
=
+ ..., i = 2,n - 1,
R-1
где
ci = -H1i(0,x2,... ,xn-1) - 2Φi(0,x2,... ,xn-1,0)[Φ1(0,x2,... ,xn-1,0)]-1,
R = -H11(0,x2,...,xn-1),
многоточие в формулах означает наличие членов более высокого порядка
малости по x1 относительно рядом стоящих. Отсюда
∫0
ci
(7)
x∗i = xi + fi(x1,... ,xn-1)dx1 = xi +
x1
+ ..., i = 2,n - 1.
1-R
x1
Если t не входит в список переменных xi, то для нахождения време-
ни t∗ окончания бесконечноударного движения достаточно, полагая yi = xi,
i = 1,n - 1, yn+1 = xn, yn = t, рассмотреть относительно переменных y1,
...,yn+1 новую систему с ударными взаимодействиями, которая имеет вид
(1)-(2). В новой системе уравнения (1) примут вид
(
)
yi = Hi
y-1,... ,y-n-1,y-n+1
,
i = 1,n - 1,
(
)
yn = yn, yn+1 = Hn
y-1,... ,y-n-1,y-n+1
,
уравнения (2), определенные в области yn+1 > 0, вид
yi = Φi (y1,... ,yn-1,yn+1), i = 1,n - 1,
yn = 1,
yn+1 = Φn (y1,... ,yn-1,yn+1),
а ударное взаимодействие происходит на гиперплоскости yn+1 = 0. В новой
системе формула (7) применима для переменной yn, откуда
2
t∗ = t +
x1 + ... ,
(R - 1)Φ1(0, x2, . . . , xn-1, 0)
где t
время, соответствующее выходу фазовой траектории из точки M,
многоточие означает наличие членов не ниже 2-го порядка по x1.
68
3.2. Численное исследование бесконечноударных движений
На многообразии xn = 0 могут существовать вспомогательные скользящие
движения гладкие кривые, проходящие через каждую точку M∗ многооб-
разия x1 = 0, xn = 0, xn < 0. Из любой точки такой кривой выходят фазовые
траектории бесконечноударных движений, оканчивающихся в одной и той же
точке M∗. Чтобы приближенно отыскать эту кривую, достаточно найти при
действии обратных отображений T-1, T-2, T-3, . . . образы точки M, лежа-
щей вблизи M∗, и ряда точек, лежащих на прямой, проходящей через точки
M и T-1(M).
Например, при соответствующих предположениях в случае перемещения
с подбрасыванием движение частицы по нормали к плоскости вибротранс-
портирования описывается, если только q > 0, в виде [18, с. 23]
d2q
= q= W sint - 1, W > 0.
dt2
Если при достижении многообразия q = 0 значение нормальной составляю-
щей скорости равно
q=
˙q- < 0, то в системе происходят мгновенные ударные
взаимодействия по формулам [18, с. 24]
q+ = -Rq-,
0 < R < 1.
По аналогии с примером 1 при замене переменных x1 =
˙q, x2 = t, x3 = q
данная система примет вид (1)-(2), где Φ1 = W sin x2 - 1, Φ2 = 1, Φ3 = x1,
H11 = -R, H12 = 0, n = 3. При значениях параметров R = 0,5, W = 0,5 все
точки многообразия x1 = 0, xn = x3 = 0 являются локальными особенностя-
ми, в силу (3), четвертого типа (так как в этом случае xn = q = 0, xn =
˙q = 0,
xn = q = W sin t - 1 < 0).
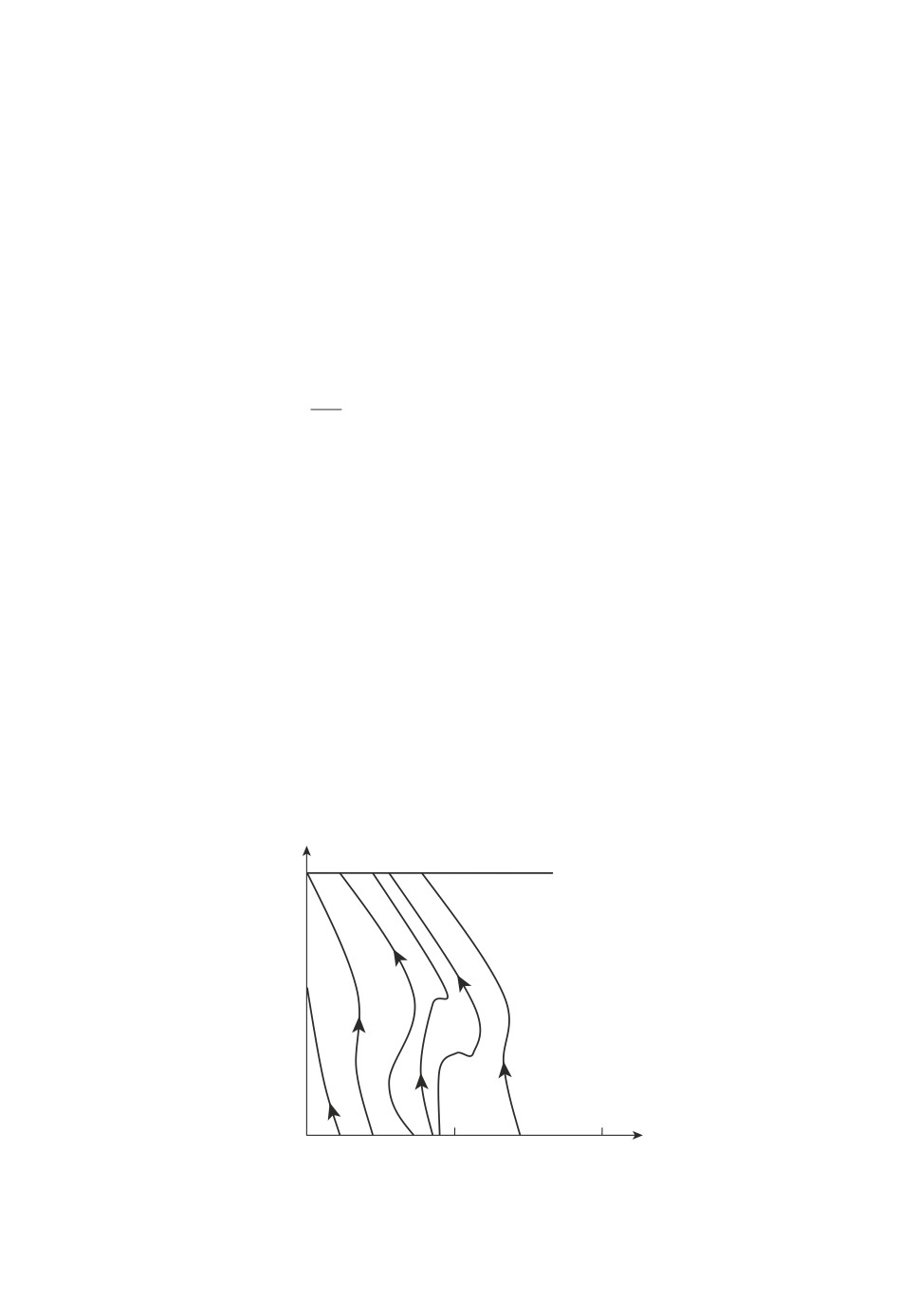
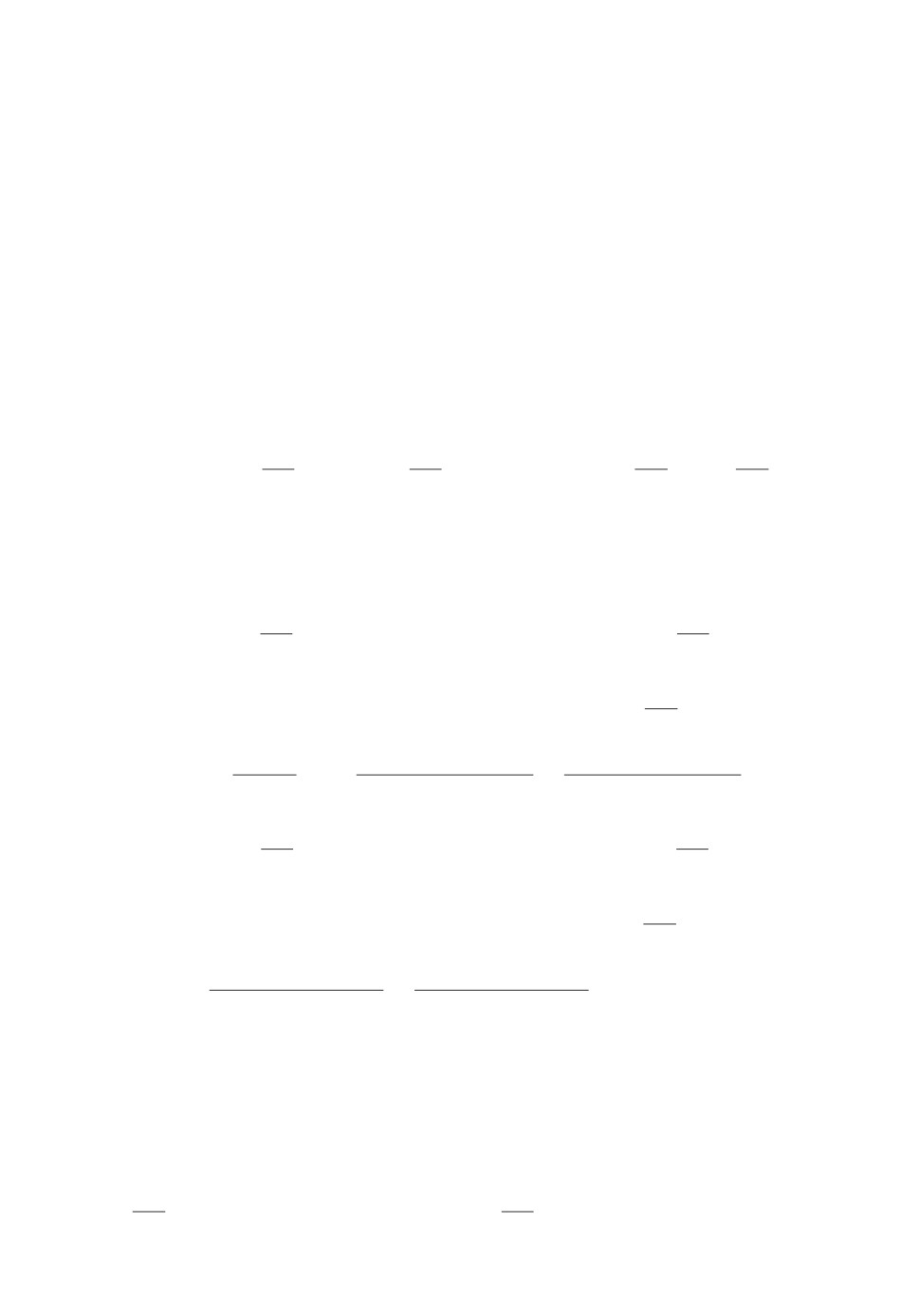
Часть фазовых кривых вспомогательных скользящих движений была по-
лучена в этом случае указанным выше способом. Две из них представлены
на рис. 1, где точки (q,t = 0) и (˙q,t = 2π) предполагаются отождествленны-
ми. Все фазовые траектории, начинающиеся в точках одной кривой вспо-
t
2p
0
3
6
q
Рис. 1. Вид двух траекторий вспомогательных скользящих движений одной
системы виброперемещения при R = 0,5, W = 0,5.
69
могательных скользящих движений, представляют собой бесконечноударные
движения, оканчивающиеся в точке пересечения этой кривой с осью t. Стрел-
ками (на кривой) указано направление движения (вдоль кривой) точек пе-
ресечения этой кривой с бесконечноударными движениями (при увеличении
времени).
4. Особенности качественной структуры фазового пространства
в малой окрестности локальной особенности шестого типа
В малой окрестности рассматриваемой локальной особенности M∗ шестого
типа общие уравнения движения виброударных систем могут быть заменой
переменных приведены к следующему виду. Мгновенное ударное взаимодей-
ствие происходит на гиперповерхности xn = 0, по достижении которой фазо-
вые переменные x1, . . . , xn-1 меняются скачкообразно (переменная xn остает-
ся равной нулю) согласно (1), а при xn > 0 изменение фазовых переменных
подчиняется дифференциальным уравнениям
x1 = dx1/dt = x1Φ11(x1,... ,xn) + x2Φ12(x1,... ,xn) +
+ xnΦ1n(x1,... ,xn) = Φ1,
(8)
xi = dxi/dt = Φi(x1,... ,xn), i = 2,... ,n - 1,
xn = dxi/dt = x1Φn1(x1,... ,xn) + xnΦnn(x1,... ,xn) = Φn.
Здесь: Φn1(x1, . . . , xn-1, 0) > 0, Φ12(0, x2, . . . , xn-1, 0) > 0, Φ2(0, . . . , 0) < 0,
t - время. Функции Φi, i = 2,...,n - 1, Φ11,Φ12,Φ1n,Φn1,Φnn принадлежат
классу Cm(Ω), m ≥ 5, где Ω - некоторая малая окрестность точки (x1 =
= 0, . . . , xn = 0) в Rn, а функции H1j ∈ Cm(Ω0), j = 1, . . . , n - 1, где Ω0 -
некоторая малая окрестность точки (x-1 = 0, . . . , x-n-1 = 0) на многообразии
xn = 0, x1 ≤ 0. Точка M∗ = (0,... ,0) является рассматриваемой здесь ло-
кальной особенностью.
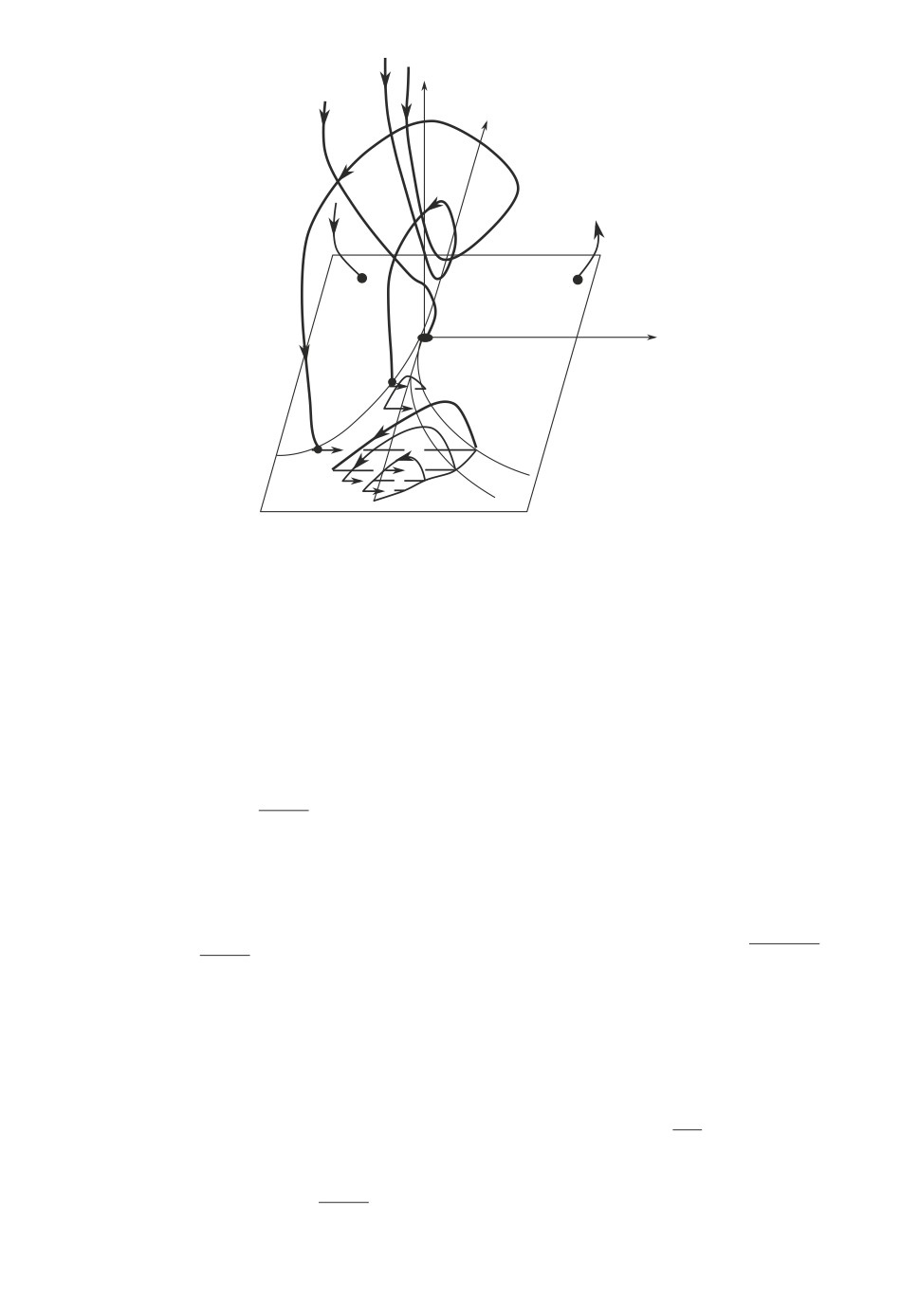
В силу (8) в точках многообразия x1 = 0, xn = 0 при x2 > 0 выполняются
соотношения
xn = 0,
xn = x2Φ12(0,x2,... ,xn-1,0)Φn1(0,x2,... ,xn-1,0) > 0,
при x2 < 0 - соотношения xn = 0, xn < 0. В точке M∗ = (0, . . . , 0) имеют место
соотношения
(9)
xn = 0,
xn = 0, x···n = Φ2(0,... ,0)Φ12(0,... ,0)Φn1
(0, . . . , 0) < 0.
Поведение фазовых траекторий системы (1), (8) в окрестности точки M∗
показано на рис. 2.
В малой окрестности точки M∗, рассматриваемой локальной особенно-
сти шестого типа, фазовые кривые системы (8) определяют точечное отоб-
ражение T1 многообразия xn = 0, x1 ≥ 0 в многообразие xn = 0, x1 ≤ 0. Это
происходит в силу теоремы о непрерывной зависимости решений дифферен-
циальных уравнений от начальных условий и в силу (9). Поэтому для то-
чек (x1 ≥ 0, x2, . . . , xn-1) из малой окрестности начала координат определено
отображение T = T2T1 многообразия xn = 0, x1 ≥ 0 в себя.
Используя формулу Тейлора для разложения по степеням t функций
xi(t) = ϕi(t,x1,... ,xn-1), i = 1,n, представляющих решение системы (8), про-
70
xn
x2 - xn - 1
M *
x1
M1
M2
n1
n2
Рис. 2. Здесь сплошными линиями обозначены траектории системы (8), а
штриховыми соединены образы и прообразы фазовых точек при отобра-
жении (1).
ходящее при t = 0 через точку (x1 > 0, x2, . . . , xn-1, 0), можно найти вид отоб-
ражения T :
[
(
)
x1 = x1 + t x2(a12 + ...) + x1(a11 + ...)
+
(
)
]
a2a12
+t2
+...
+ t3A1 (-R + ...) = g1(x1,... ,xn-1,t),
2
(10)
[
(
)
xi = xi + t(ai + ...) + Ait2 + x1 + t x2(a12 + ...) + x1(a11 + ...) +
(
)
]
a2a12
+t2
+...
+ A1t3 (bi + ...) = gi(x1,... ,xn-1,t), i = 2,n - 1,
2
где
bi = H1i(0,... ,0),
0 < R = -H11(0,...,0) < 1,
а величина t > 0 находится из уравнения
[
(
)]
a12
gn(x1,... ,xn-1,t) = x1(1 + ...) + t x1(ã + ...) + x2
+...
+
2
(11)
(
)
a12a2
+t2
+...
+ t3An(x1,... ,xn-1,t) = 0.
6
71
Здесь: ai = Φi(0, . . . , 0), aij = Φij(0, . . . , 0), i, j = 1, n, a2 < 0, a12 > 0; ã - неко-
торое число; 0 < θi < t, i = 1, n; Aj (j = 1, n) - некоторые функции, огра-
∑n-1
ниченные на множестве
|xi| ≤ r, |t| ≤ r1 (числа r, r1 > 0); gi ∈ Cm,
i=1
i = 1,n - 1.
Теперь можно найти уравнение для множества ν1(образ множества xn = 0,
x1 = 0, x2 ≥ 0 при отображении T):
(
)
3a12
x1 = x22
-
R+...
= x22ν1(x2,...,xn-1)=ν1,
8a2
(12)
ν1 ∈ Cm-2,
0 < R = -H11(0,...,0) < 1,
∑n-1
где x2 = x2(-2 + . . .) ≤ 0 при
|xi| ≤ r1 и r1
достаточно мало.
i=2
Рассматривая множества
∑
|xi| ≤ r,
0 < x1 ≤ x22νN(x2,...,xn-1) = νN, x2 < 0,
i=2
где x1 = νN - образ многообразия x1 = 0, xn = 0, x2 ≥ 0 при действии отоб-
ражения TN , можно легко доказать следующее утверждение.
Лемма 4.1. Существуют такие достаточно малые числа r и r0
(r, r0 > 0), что из каждой точки множества Gr
∑
(13)
|xi| ≤ r; xn = 0; x1 > 0 или x1 = 0, x2
> 0,
i=1
выходит фазовая траектория системы (1), (8), представляющая собой бес-
конечноударное движение, которое оканчивается в точках многообразия
∑
xn = 0, x1 = 0, x2 < 0,
|xi| ≤ r0.
i=2
5. Описание бесконечноударных движений в случае
локальной особенности шестого типа
Бесконечноударные движения, о которых говорится в теореме 4.1, допус-
кают описание с помощью гладких дифференциальных уравнений. Их ин-
тегральные кривые вспомогательные скользящие движения. (На рис. 1
кривая, проходящая через точки M1 и M2, изображает траекторию таких
движений).
Для этого можно произвести замену координат
(14)
x1 = y1y22, xi = yi
,
i = 2,...,n - 1.
Для любого y01 > 0 существуют такие величины r∗ = r∗(y01) > 0 и δ∗ =
= δ∗(y01) > 0, что при условиях
∑
(15)
y01 - δ∗ ≤ y1 ≤ y01 + δ∗,
|yi| ≤ r∗, y2
<0
i=2
72
отображение T имеет вид
[
][
]-2
y1 =
G1(y1, t) + q1(y1,... ,yn-1, t)
G2(t) + q2(y1,... ,yn-1, t)
=
= y1g1(y1,...,yn-1) = q1(y1,... ,yn-1),
(
)
y2 = y2
G2(t) + q2(y1,... ,yn-1, t)
=
(16)
= y2 + y2y1gi(y1,... ,yn-1) = q2(y1,...,yn-1),
yi = yi + y2 qi(y1, . . . , yn-1,t) =
= yi + y2y1gi(y1,...,yn-1) = qi(y1,...,yn-1), i = 3,...,n - 1,
где t находится из уравнения
(17)
Gn(y1,t) + qn(y1, . . . , yn-1,t) = qn(y1, . . . , yn-1) = 0,
t∈Cm-2иимеетвсилу(17)вид
t= t(y1,y2,... ,yn-1),
t(y01, 0, . . . , 0) = 3(y0 - 1)(2a2)-1,
(18)
√
y0 =
1 - 8a2y01(3a12)-1.
Здесь
qj ∈ Cm-2, j = 1, . . . , n;
qk(y1, 0, . . . , 0,t) ≡ 0, k = 1, 2, n;
qi(y1, 0, . . . , 0,t) ≡ ait, i = 3, . . . , n - 1;
(
)
G1 = -R
y1 + a12t+ a2a12t2/2
,
G2 = 1 + a2t,
Gn = y1 + a12t/2 + a2a12t2/6,
g1(0,... ,0) = R,
g2(0,... ,0) = -2a2a-112,
gi(0, . . . , 0) = -2aia
2
Теорема 5.1. Существуют и единственны такие функции fi и суще-
ствует такая величина r∗1 > 0, что при всех 0 < r ≤ r∗1 для любой точки M
множества Dr, задаваемого условиями
∑
(19)
0 < x1, x1 = ax22, x2 < 0,
|xi| ≤ r - a,
0 < a ≤ r, xn
= 0,
i=2
справедливо следующее:
все точки Mj = Tj(M), j = 1, 2, 3, . . . , лежат на проходящей через M ин-
тегральной кривой системы дифференциальных уравнений
dyi
(20)
= fi (y1,... ,yn-1
),
i = 2,...,n - 1,
dy1
где
fi = y2f˜i ∈ Cm-4(Dr1),
73
Dr1 - множество, задаваемое неравенствами
∑
(21)
|yi| ≤ r, y1 ≥ 0, y2
≤ 0.
i=1
Пусть Er обозначает множество точек, координаты которых удовлетворя-
ют условиям
∑
(22)
|xi| ≤ r, xn = 0,
0 < x1 ≤ ν1(x2,...,xn-1), x2
< 0,
i=2
где функция ν1 определяется в (12).
Теорема 5.2. Существуют и единственны такие функции fi и суще-
ствует такая величина r∗2 > 0, что для любой точки M множества Er2,
задаваемого условиями (22) при r = r∗2, справедливо следующее:
все точки Mj = Tj(M), j = 1, 2, 3, . . . , лежат на проходящей через M
интегральной кривой системы дифференциальных уравнений (20), где fi ∈
∈Cm-4, fi = y2f˜i
fi ∈ Cm-5.
Доказательство теорем см. в Приложении.
6. Применение полученного описания
локальной особенности шестого типа
6.1. Нахождение предельных значений бесконечноударных движений
В силу (П.10) система (20) дифференциальных уравнений имеет вид
dyi
= fi(y1,... ,yn-1) =
dy1
(
)
[
]
=y2
- 2ai/
a12(1 - R)
+...
,
i = 2,...,n - 1.
Поэтому предельные значения бесконечноударных движений, начинающихся
в точке (y1, . . . , yn-1), равны
∫0
y∗i = yi + fi(y1,... ,yn-1)dy1 =
y1
(
)
2ai
=yi +y1y2
+...
,
i = 2,n - 1,
a12(1 - R)
многоточие в формулах означает наличие членов более высокого порядка
малости по y2 . . . , yn-1 относительно рядом стоящих.
Время t∗ окончания бесконечноударного движения, в силу рассуждений
раздела 3.1, имеет вид
(
)
2
t∗
=t+y1y2
+
a12(1 - R)
74
t
t
2p
2p
4
4
t2
2
2
t1
t1
0
2
q
0
2
q
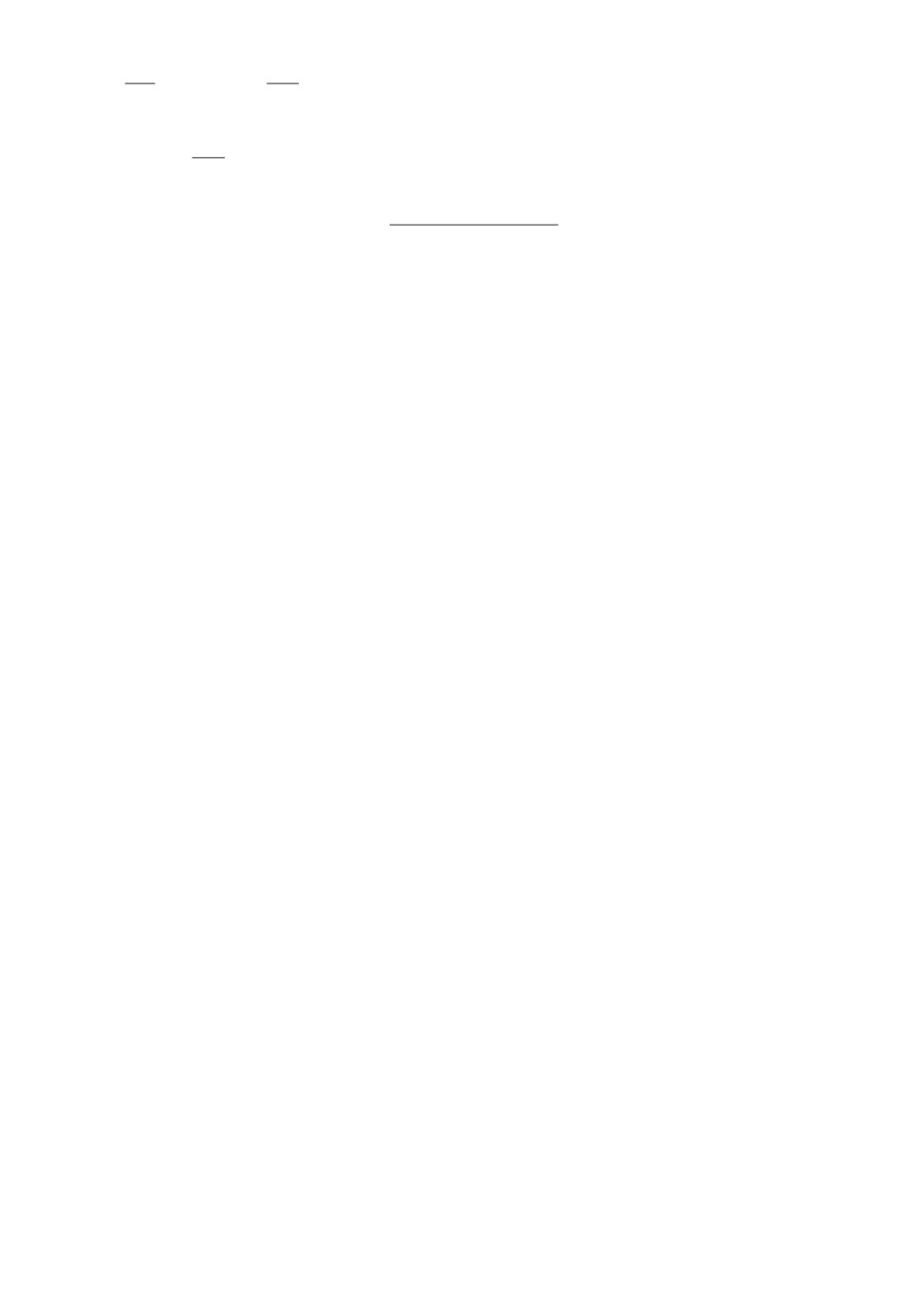
Рис. 3. Область бесконечноудар-
Рис. 4. Вид трех траекторий вспо-
ных движений (заштрихована) од-
могательных скользящих движений
ной системы виброперемещения.
одной системы виброперемещения.
6.2. Численное исследование бесконечноударных движений
Здесь на примере конкретной задачи из раздела 3.2 показаны при R = 0,5,
W = 3:
область бесконечноударных движений [14] (рис. 3), в которой реализуются
указанные ниже траектории;
вспомогательные скользящие движения (рис. 4), включая траекторию,
проходящую через точку (
˙q = 0,t1 = arcsin(W-1)) - локальную особенность
5-го типа.
Стрелки на рис. 4 имеют тот же самый смысл, что и на рис. 1. Точка
(˙q = 0,t2),t2 = π - t1, представляет собой локальную особенность 6-го типа,
точки (
˙q = 0,t2 < t ≤ 2π) - локальные особенности 4-го типа.
7. Заключение
В результате проведенного исследования предлагается описание движений
виброударной системы наиболее общего вида, состоящих из ударных дви-
жений (разностные уравнения) и безударных движений (дифференциальные
уравнения). Такой синтез движений разных типов представляет основную
трудность для описания движений виброударных систем. Эти разнотипные
движения чередуются бесчисленное число раз, а описанный здесь результат
таких чередований гладкие дифференциальные уравнения (хотя даже про-
стейшие виброударные системы до сих пор не имеют полного описания).
Такое описание необходимо для правильного и грамотного вычисления
протекающих процессов в виброударных системах, в частности бесконечно-
ударных движений, для подсчета всевозможных характеристик движений в
75
указанных системах (например, как это было сделано в [20] при расчете сред-
ней скорости виброперемещения, включая режимы, имеющие участки беско-
нечноударных движений). А для этого требуется знание момента (и времени)
окончания бесконечноударных движений.
ПРИЛОЖЕНИЕ
Доказательство теоремы 5.1. Далее для любой функции ϕ(y1,
...,yn-1) используются обозначения
ϕ = ϕ(y1,...,yn-1), ϕ(M1) = ϕ(y1,..., yn-1),
где
M1 = T(M) = (y1,... , yn-1), M = (y1 ≥ 0,y2,... ,yn-1).
Для нахождения fi, i = 2, . . . , n - 1, составляются функциональные урав-
нения точно так же, как и при доказательстве теоремы в [13]. В данном случае
соответствующие функциональные уравнения имеют вид
∑
∑
∂qi
∂qi
∂q1
(Π.1)
+
fj = fi(M1)∂q1 +
fj
,
i = 2,...,n - 1,
∂y1
∂yj
∂y1
∂yj
j=2
j=2
а отображение T задается формулами (15). Уравнения (П.1) можно перепи-
сать в виде
(
)
∑
∂q2
∂q2
∂q2
q2y2 + y2y1
+
y2y1
fj +
1+y1q2 +y1y2
f2 =
∂y1
∂yj
∂y2
j=3
∑
∂q1
∂q1
= f2(M1)q1 + y1
+
y1
fj,
∂y1
∂yj
j=2
∑
∂qi
∂qi
(Π.2)
qiy2 + y1y2
+
y2y1
fj +
∂y1
∂yj
j=3,j=i
(
)
(
)
∂qi
∂qi
+ y1qi +y1y2
f2 +
1+y2y1
fi =
∂y2
∂yi
∑
∂q1
∂q1
= fi(M1)q1 + y1
+
y1
fj , i = 3,... ,n - 1.
∂y1
∂yj
j=2
Решение уравнений (П.2) можно искать в такой форме:
(Π.3)
fi = y2f˜i
,
i = 2,...,n - 1.
76
Тогда (П.2) примут вид
(
)
∂q2
∑
∂q2
∂q2
q2 + y1
+
y1y2
fj +
1+y1q2 +y1y2
f2 =
∂y1
∂yj
∂y2
j=3
∑
∂q1
∂q1
=
f2(M1)(1 + y1q2)q1 + y1
+
y1y2
fj,
∂y1
∂yj
j=2
∑
(Π.4)
∂qi
∂qi
qi + y1
+
y1y2
fj +
∂y1
∂yj
j=3, j=i
(
)
(
)
∂qi
∂qi
+ y1qi +y1y2
f2 +
1+y2y1
fi =
∂y2
∂yi
∑
∂q1
∂q1
=
fi(M1)(1 + y1q2)q1 + y1
+
y1y2
fj , i = 3,... ,n - 1.
∂y1
∂yj
j=2
Уравнения (П.4) удобнее записать в виде
∑
∑
(Π.5)
ψi0
fi +
ψijf˜j
fi(M1)ψ10 +
ψ1jf˜j
,
i = 2,...,n - 1,
j=2
j=2
где
ψ10(y1 = 0,... ,yn-1 = 0) = R, ψk0(0,... ,0) = -2aka-112, k = 2,... ,n - 1;
ψij(0,... ,0) = 0, i = 1,... ,n - 1, j = 2,... ,n - 1;
ψij ∈ Cm-4, i = 1,... ,n - 1, j = 0,2,3,... ,n - 1.
Теперь для нахождения при достаточно малых yi, i = 1, . . . , n - 1, решения
уравнений (П.5) можно указать следующий итерационный процесс:
∑
∑
fs+1i = -ψi0 -
ψijf˜sj
fsi(M1)ψ10 +
ψ1jf˜s,
j
(Π.6)
j=2
j=2
i = 2,...,n - 1, s = 0,1,2,...
а) C х о д и м о с т ь п р о ц е с с а (П.6). Пусть норма непрерывных в Dr1 век-
торных функци
fs =
fs2,...
fsn-1) равна
{
}
∑
(Π.7)
fs∥ = max
fsi|
,
M ∈Dr
1
i=2
где Dr1 - множество, задаваемое неравенствами (21); r - некоторая величина,
подлежащая определению; r ≤ r0; r0 - величина, определяемая в лемме 4.1.
77
Тогда для двух серий непрерывных векторных функци
fs =
fs2,...
fsn-1)
и hs = (hs2,...,hsn-1), получаемых из (П.6), имеет место
∑
[
]
fs+1i -hs+1i = -
ψij
fsj -hsj) + ψ10
fsi(M1) -hsi(M1)
+
j=2
∑
[
]
+ ψ1j
fsi(M1
fsj -hsi(M1)hsj +hsi(M1
fsj -hsi(M1
fs
=
j
j=2
∑(
)
=
-ψij +hs(M1)ψ1j
fsj -hsj) +
i
j=2
∑
(
)
+ψ10 + ψ1jf˜s
fsi(M1) -hsi(M1)
j
j=2
Отсюда,
∑
∑∑
fs+1i -hs+1i
≤
ψij +hsi(M1)ψ1j
fsj -hsj+
-
i=2
j=2 i=2
∑
∑
+
ψ10 +
ψ1jf˜sj
fsi(M1) -hsi(M1).
j=2
i=2
Поэтому
∑∑
(Π.8)
fs+1 -hs+1
≤ max
fsi -hsi+
ψ
ji -hj(M1)ψ1i
M ∈Dr1
i=2 j=2
∑
∑
+
ψ10 +
ψ1jf˜sj
fsi(M1) -hsi(M1)
.
j=2
i=2
Используя (16), можно установить, что M1 = T (M) ∈ Dr1, если M ∈ Dr1.
Поэтому для любой непрерывной функции ϕ(y1, . . . , yn-1)
(Π.9)
max
|ϕ(M1)| ≤ max
|ϕ(M)|.
M ∈Dr1
M ∈Dr
1
Если
fi,
fi ∈ C0(Dr1), i = 2,... ,n - 1, удовлетворяют уравнениям (П.6), то
справедливо
fi = -2ai[a12(R - 1)]-1
fi,
где
fi(y1 = 0,... ,yn-1 = 0) = 0.
78
Поэтому можно считать, что
hs
fsi = 2ai[a12(1 - R)]-1
fsi,
= 2ai[a12(1 - R)]-1 + ĥsi,
i
(Π.10)
i = 2,...,n - 1, s = 0,1,2,...,
гд
fsi,ĥsi - непрерывные функции
fsi(y1 = 0,... ,yn-1 = 0) =ĥsi(y1 = 0,...
...,yn-1 = 0) = 0.
Пусть при M ∈ Dr1 имеют место неравенства
(Π.11)
fsi| < K,
|ĥsi
| < K, i = 2,...,n - 1,
где K - некоторая положительная величина, s = 0. Тогда, используя вытека-
ющие из (П.6) равенства
∑ (
)
fs+1i = -ψi0 + ψi0
- ψij
2aj [a12(1 - R)]-1
fsj
+
yj=0,j=1,...,n-1 j=2
[
(
)
+ 2ai[a12(1 - R)]-1
fsi(M1) ψ10 - ψ10|yj=0,j=1,...,n-1 +
]
∑ (
)
+ ψ1j
2aj [a12(1 - R)]-1
fs
+
fsi(M1),
j
j=2
i = 2,...,n - 1, s = 0,1,2,... ,
и уменьшая (при необходимости) в (21) величину r, можно добиться выпол-
нения (П.11) во всем множестве Dr1 при любых s.
Возвращаясь теперь к (П.8), можно с помощью (П.9)-(П.11) так подобрать
множество Dr∗∗1 = D1∗∗
f0,h0) (за счет уменьшения в (21) величины r), что
в норме (П.7)
(Π.12)
fs+1 -hs+1
≤ 0,5(1 + R)
fs -hs, s = 0,1,2,
Неравенство (П.12) гарантирует существование (в силу [19, с. 103] полно-
Dr
ты пространства непрерывных в
функций) решени
fi, i = 2,... ,n - 1,
1
уравнений (П.4) в классе C0 (непрерывных функций) в замкнутом множе-
f0,h0).
стве Dr∗∗1
б) Г л а д к о с т ь р е ш е н и я. Поскольку отображение (16) имеет вид (П.1)
из [13], а роль множества Dr в формулировке и доказательстве теоремы в [13]
может играть множество Dr1, задаваемое неравенствами (21) данной работы
и обладающее аналогичным свойством (T (Dr1)⊂Dr1), то имеют место установ-
ленные при доказательстве теоремы [13] единственность решения уравнений
(П.1) данной работы и следующее свойство
fi ∈ Cm-4(Dr∗1), i = 2,... ,n - 1,
79
при соответствующем значении r∗, где в силу единственности и (П.3) fi =
=y2f˜i.
Поэтому значение r∗1 = min{r∗, r∗∗, r∗} удовлетворяет заключению теоре-
мы.
Теорема 5.1 доказана.
Доказательство теоремы 5.2. Как было сказано ранее, для любого
y01 > 0 существуют такие величины r∗ = r∗(y01), δ∗ = δ∗(y01), что при услови-
ях (15) отображение T принимает вид (16), (17). Составляя, как и ранее [13],
функциональные уравнения для нахождения правых частей дифференциаль-
ных уравнений (20), можно прийти к (П.1). По теореме 5.1 решение этих
fi ∈ Cm-4,
уравнений при (y1, . . . , yn-1) ∈ Dr11 существует и имеет вид fi = y
fi ∈ Cm-5, i = 2,... ,n - 1, причем отображение T принимает вид (16).
Из (П.1) при fi = y2f˜i, i = 2, . . . , n - 1, следует
)
∑
(∂qi
∂qi
- y2f˜i(M1)∂q1
fj = y-12 y2f˜i(M1)∂q1
-y-1
,
2
(Π.13)
∂yj
∂yj
∂y1
∂y
1
j=2
i = 2,...,n - 1.
Отсюда, используя (16), можно получить
]
∑
(
)
[∂q2
∂q1
˜ =
- y2 G2(t) + q2(y1,...,yn-1,t)
f2(M1)
∂yj
∂y
j
j=2
(
)
∂q1
= G2(t) + q2(y1,... ,yn-1, t)
f2(M1)
-
∂y1
)
(∂G2(t)
∂q2(y1,... ,yn-1, t)
∂q2(y1,... ,yn-1, t)
-
t′
+
+
t′
,
y1
y1
∂t
∂y1
∂t
(Π.14)
]
∑
(
)
[∂qi
∂q1
˜ =
-y2
G2(t) + q2(y1,... ,yn-1, t)
fi(M1)
∂yj
∂y
j
j=2
(
)
∂q1
= G2(t) + q2(y1,... ,yn-1, t)
fi(M1)
-
∂y1
)
(∂qi(y1,...,yn-1,t)
∂qi(y1,... ,yn-1, t)
-
+
t′
,
i = 3,...,n - 1.
y1
∂y1
∂t
На (П.14), т.е. и на (П.13), можно смотреть как на линейную систему отно-
сительно неизвестны
fi, i = 2,... ,n - 1, при условии, что величин
fi(M1),
i = 2,...,n - 1, известны.
В силу (16)-(18) в точке M0 = (y1 = y01, y2 = 0, . . . , yn-1 = 0) соответствую-
щие производные имеют значения
∂q2
∂q2
=1+a2t
= (3y0 - 1)/2,
= 0, j = 3, . . . , n - 1,
∂y2
M0
∂yj
M0
M0
80
∂qi
∂qi
= 1,
= 0, j = 3, 4, . . . , i - 1, i + 1, i + 2, . . . , n - 1,
∂yi
∂yj
M0
M0
∂qi
=ait
= 3ai(y0 - 1)(2a2)-1, i = 3, . . . , n - 1,
∂y2
M0
M0
где
√
y0 =
1 - 8a2y01(3a12)-1 > 1.
Отсюда, главный определитель Δ системы (П.13), который является
непрерывной функцией переменных y1, . . . , yn-1, в точке M0 имеет значение
Δ
= (3y0 - 1)/2 = 0.
M0
Поэтому при достаточно малых r∗ и δ∗ для всех значений переменных
y1,... ,yn-1, удовлетворяющих неравенствам (15), имеет место неравенство
(Π.15)
Δ = 0,
т.е. из системы (П.13) можно однозначно найти
fi ∈ Cm-5, i = 2,... ,n - 1,
зна
fi(M1) ∈ Cm-5.
С другой стороны, согласно сказанному в разделе 4, существует такое ма-
лое r∗ > 0, что при
∑
0 < x1 ≤ r∗x22, x2 < 0,
|xi| ≤ r∗
i=2
отображение T в координатах (14) имеет вид (16). Отсюда главный опре-
делитель Δ системы (П.13) в точке M00 = (y1 = 0, y2 = 0, . . . , yn-1 = 0) равен
Δ
= 1 = 0.
M0
0
Поэтому при достаточно малых r∗∗ иδ∗ для всех значений переменных
y1,... ,yn-1, удовлетворяющих неравенствам
∑
0≤y1 ≤δ∗,
|yi| ≤ r∗∗, y2 ≤ 0,
i=2
имеет место неравенство (П.15).
[
]
В силу компактности отрезка A =
δ∗, -3a12R(4a2)-1
найдется конеч-
ное число точек y01 этого отрезка таких, что совокупность интервалов
(y01 - δ∗(y01), y01 + δ∗(y01)), определяемых условиями (П.15) и (15), образует ко-
нечное подпокрытие отрезка A. Поэтому существуют такое малое значение
r∗∗1 > 0, минимальное из значений r∗ = r∗(y01) из (15) и значения r∗∗, что при
выполнении условий
∑
(Π.16)
0 ≤ y1 ≤ -3a12R(4a2)-1, y2 ≤ 0,
|yi| ≤ r∗∗1
i=2
имеет место неравенство (П.15).
81
Имеет место следующее.
Утверждение П.1. Существует такое целое P > 0 и такое малое
r∗2 > 0, что образ TP (Er2) множества Er2, задаваемого неравенствами (22)
при r = r∗2, лежит внутри множества Dr11.
Здесь величина r∗1 определяется в теореме 5.1, множество Dr1 задается
∑
условиями (21), r∗2 ≤ r∗∗1, причем при
|yi| ≤ r∗2, y2 ≤ 0 имеет место
i=2
ν1(y2,... ,yn-1) ≤ -3a12R(4a2)-1.
При этом, все образы T (Er2 ), T2(Er2 ), . . . , TP (Er2 ) множества Er2 и само
множество Dr11 лежат внутри множества (П.16).
Тогда в силу справедливости (П.15) и теоремы 5.1 в любой точке мно-
жества Er2 можно найти из системы (П.13) значения функций
fi ∈ Cm-5,
i = 2,...,n - 1.
Теперь можно доказать, что функции fi = y2f˜i, единственное решение
уравнений (П.1), являются более гладкими (единственность функций fi уста-
навливается от противного с использованием утверждения П.1 и теоре-
мы 5.1). Точнее, используя соотношения fi = y2f˜i, можно повторить прове-
денные выше рассуждения (но уже относительно функций fi, i = 2, . . . , n - 1)
и получить, что при достаточно малом r = r∗2 в любой точке множества Er2
можно найти из системы (П.1) значения функций fi ∈ Cm-4.
Теорема 5.2 доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Неймарк Ю.И. Теория вибрационного погружения и вибровыдергивания. Ин-
женерн. сб. М.: АН СССР, 1953. Т. 16. С. 13-48.
2. Блехман И.И. Вибрационная механика и вибрационная реология (теория и при-
ложения). М.: ФИЗМАТЛИТ, 2018.
3. Асташев В.К., Крупенин В.Л. Нелинейная динамика ультразвуковых техноло-
гических процессов: учебник / В.К. Асташев, В.Л. Крупенин; Моск. гос. ун-т
печати им. Ивана Федорова. М.: МГУП им. Ивана Федорова, 2016.
4. Бурд И.Ш., Крупенин В.Л. Усреднение в квазиконсервативных системах: маят-
никовые и виброударные системы. Библиотека ВНТР. М.: Белый ветер, 2016.
5. Блехман И.И., Блехман Л.И., Васильков В.Б. и др. Об износе оборудования в
усовиях вибрации и ударных нагрузок // Вестн. научн.-техн. развития. 2018.
№ 11 (135). С. 3-14.
6. Вульфсон И.И. Устранение возникающих из-за зазоров виброударных режи-
мов при учете характеристик электродвигателя // Вестн. научн.-техн. развития.
2019. № 2 (138). С. 9-14.
7. Маркеев А.П., Сухоручкин Д.А. Об устойчивости поступательного движения
твердого тела с ударами о горизонтальную плоскость // ДАН. 2016. Т. 466. № 5.
С. 550-554.
8. Динамика виброударных (сильно нелинейных) систем. XVIII Междунар. сим-
поз. посв. 100-летию со дня рождения д-ра техн. наук А.Е. Кобринского / Под
ред. В.К. Асташева, В.Л. Крупенина, Г.Я. Пановко, К.Б. Саламандра. М. 2015.
Ин-т машиноведения им. А.А. Благонравова РАН. 332 с.
82
9.
Мак-Миллан В.А. Динамика твердого тела: Пер. с англ. М.: Изд-во иностр. лит-
ры, 1951.
10.
Фейгин М.И. Скользящий режим в динамических системах с ударными взаимо-
действиями // Прикл. математика и механика. 1967. Вып. 3. С. 533-536.
11.
Нагаев Р.Ф. Механические процессы с повторными затухающими соударениями.
М.: Наука, 1985.
12.
Горбиков С.П., Неймарк Ю.И. Вспомогательные скользящие движения дина-
мических систем с ударными взаимодействиями / Дифференциальные и инте-
гральные уравнения: Межвуз. сб. Горький, 1981. С. 59- 64.
13.
Горбиков С.П. Дифференциальные уравнения, определяемые динамическими
системами с ударными взаимодействиями на границе области существования
бесконечноударных движений // Дифференц. уравнения. 1998. Т. 34. № 1.
С. 18-23.
14.
Горбиков С.П. Особенности строения фазового пространства динамических си-
стем с ударными взаимодействиями // Изв. АН СССР. Механика твердого тела.
1987. № 3. С. 23-26.
15.
Горбиков С.П. Локальные особенности динамических систем с ударными взаи-
модействиями // Мат. заметки. 1998. Т. 64. Вып. 4. С. 531-542.
16.
Горбиков С.П. Топологическая эквивалентность одного типа локальных особен-
ностей динамических систем с ударными взаимодействиями // Мат. заметки.
2001. Т. 70. Вып. 2. С. 181-194.
17.
Неймарк Ю.И. Метод точечных отображений в теории нелинейных колебаний.
М.: Наука, 1972.
18.
Нагаев Р.Ф. Периодические режимы вибрационного перемещения. М.: Наука,
1978.
19.
Михайлов В.П. Дифференциальные уравнения в частных производных. М.: Нау-
ка, 1976.
20.
Горбиков С.П., Неймарк Ю.И. Результаты расчета средней скорости вибро-
транспортирования // Машиноведение АН СССР. 1987. № 4. С. 39-42.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 10.10.2019
Принята к публикации 30.01.2020
83