

Акустический журнал, 2023, T. 69, № 3, стр. 374-385
Импульсный корреляционный расходомер газа с накладными датчиками
А. Д. Мансфельд a, Г. П. Волков a, *, Р. В. Беляев a, А. Г. Санин a, Д. В. Мороскин b
a ИПФ РАН
603950 Нижний Новгород, ул. Ульянова 46, Россия
b ООО “УЛЬТРАМЕТР”
607188 Саров, Южное шоссе 12, корп. 15А, Россия
* E-mail: volkov@ipfran.ru
Поступила в редакцию 26.05.2022
После доработки 26.05.2022
Принята к публикации 22.09.2022
- EDN: YJRAYJ
- DOI: 10.31857/S0320791922700034
Аннотация
Создан и исследован усовершенствованный импульсный корреляционный расходомер газа с накладными датчиками для измерения течений газа в трубах. Работа подобных устройств основана на измерении скорости движения вихрей в турбулентном потоке. Обсуждаются проблемы выделения слабого полезного сигнала, прошедшего через газ, на фоне помех от сигналов, распространяющихся по стенке трубы. Предложена схема корреляционного расходомера с импульсным зондированием и возможностью автоматического поиска полезного сигнала на фоне помех. Продемонстрирована работа расходомера на фоне вибраций стенки трубы и на фоне капель жидкости, находящихся в потоке.
ВВЕДЕНИЕ
Проблема измерения расхода газа является весьма важной для целого ряда применений. Существует множество вариантов ультразвуковых расходомеров, измеряющих расход газа при его течении в трубах [1, 2]. Большинство из них используют врезные ультразвуковые преобразователи, имеющие непосредственный контакт с измеряемым потоком. Как правило, в этих приборах используют так называемый времяпролетный метод измерения, который заключается в измерении времени распространения ультразвуковой волны вверх и вниз по течению газа с помощью врезных датчиков с последующим вычислением скорости потока.
Менее распространен второй тип времяпролетных расходомеров – это расходомеры с накладными датчиками, например, расходомеры фирмы Controlotron. Преимуществом последних является отсутствие непосредственного контакта преобразователя (датчика) с потоком, а следовательно, возможность измерения без подготовки трубы и без врезки в стенку трубы. Соответственно, отсутствуют воздействия на датчики со стороны потока (загрязнение, абразивное воздействие летящих частиц в потоке), а также воздействие на поток со стороны датчиков. Поэтому вызывает интерес использование приборов с накладными датчиками, не имеющими контакта с исследуемой средой. Однако использование накладных датчиков имеет специфические проблемы, особенно при зондировании газовых потоков. Во-первых, при использовании накладных датчиков уровень сигнала, проходящего в газ через стальную стенку, очень мал, т.к. мал коэффициент прохождения через границы “металлическая стенка–газ”. Мероприятия, позволяющие измерять слабые сигналы на фоне сигналов, распространяющихся по стенке трубы, описаны в работах [3–5].
Существует два типа приборов с накладными датчиками – времяпролетный и корреляционный [4, 5].
Времяпролетный метод, как и в случае врезных датчиков, основан на зондировании потока ультразвуковыми импульсами с измерением времени распространения вверх и вниз по потоку. Особенность времяпролетного метода с накладными датчиками состоит в том, что при зондировании (излучении и приеме) используются волны Лэмба, распространяющиеся по стенке трубы. По мере распространения лэмбовской волны по стенке происходит “подкачка” продольной волны в газ, что дает выигрыш в уровне полезного сигнала. Для вычисления искомой скорости потока с помощью времяпролетного расходомера необходимо знать скорость волны Лэмба. Понятно, что точность измерения зависит от величины скорости распространения волны Лэмба, которая зависит от типа волны (А0 или S0), от рабочей частоты, от толщины и материала, от температуры стенки. Соответственно, скорость волны Лэмба должна контролироваться с высокой точностью.
Корреляционный расходомер, описанный ниже, имеет некоторые преимущества перед времяпролетным, т.к. результат не зависит от скорости звука, распространяющегося по стенке. Описания подобных корреляционных расходомеров приведены в целом ряде статей [6–10]. В основу корреляционного метода положена регистрация прохождения вихрей газа через ультразвуковые пучки. Из этого понятно, что при отсутствии обтекаемых тел измерения возможны лишь при турбулентном течении газа в трубе. Взаимодействие ультразвука с вихревой дорожкой исследовано в работе [11]. Отметим, что для возникновения турбулентного режима в трубе необходимо, чтобы число Рейнольдса превышало 2000 [12, 13]. Соответственно, подобные измерения невозможны для потока с малым числом Рейнольдса. В настоящей работе разработан и исследован корреляционный расходомер с накладными датчиками (преобразователями), измеряющий скорость газа по скорости переноса вихрей турбулентным потоком на основе импульсного зондировании потока. Использование корреляционного расходомера для измерения скорости потока описано в нашей статье [10]. Здесь более подробно описана схема прибора и описаны некоторые лабораторные и натурные эксперименты.
ПРИНЦИП РАБОТЫ КОРРЕЛЯЦИОННОГО РАСХОДОМЕРА
В корреляционном расходомере измерение производится двумя ультразвуковыми пучками, проходящими поперек трубы через стенки трубы и зондируемый поток. Каждый пучок принимается своим приемным датчиком, так что обрабатываются сигналы, принимаемые в двух каналах. Сигналы ультразвуковых пучков, пересекающих турбулентный поток газа, модулируются по фазе и амплитуде из-за флуктуаций скорости потока. Флуктуации принятых сигналов (фазы и/или амплитуды) в каждом из каналов выделяются и затем подвергаются взаимно-корреляционной обработке. Далее производится измерение времени задержки корреляционного пика относительно нуля.
На рис. 1 показано схематическое расположение ультразвуковых пучков при зондировании и получающаяся функция взаимной корреляции в результате обработки принимаемых сигналов. На рис. 1б показаны осциллограммы сигналов, прошедших через крупномасштабные турбулентные структуры в двух каналах с задержкой по времени. На рис. 1в показана взаимно корреляционная функция (ФВК). Далее производится измерение времени задержки τ корреляционного пика относительно нуля. По расстоянию L (рис. 1а) и по времени τ (рис. 1в) определяется скорость потока:
Рис. 1.
Зондирование газового течения внутри трубы: (а) – расположение датчиков и зондирующих пучков; (б) – осциллограммы в каналах, (в) – соответствующая функция взаимной корреляции (ФВК).
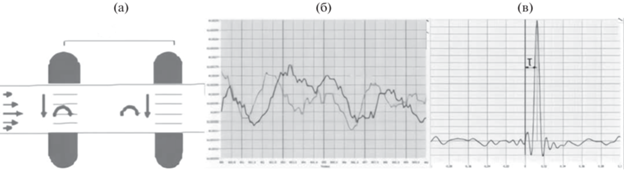
Выбросы в ФВК слева и справа от основного пика (рис. 1в) вызваны наличием некоррелированных флуктуаций на трассах прохождения зондирующих пучков.
Корреляционный метод, как это будет показано ниже, имеет следующие достоинства по сравнению с времяпролетным режимом:
– независимость результата измерения от скорости звука в газе и скорости волны Лэмба в стенке трубы (использование волны Лэмба необязательно);
– слабая зависимость некоррелированных сигналов, полученных в разных зондирующих ультразвуковых пучках, например, при наличии капель жидкости в потоке;
– возможность устранения помех, связанных с вибрацией стенки, создаваемых различными механизмами.
Вместе с тем, основной проблемой расходомеров с накладными датчиками является наличие, наряду с очень слабым полезным сигналом, прошедшим через газ, очень сильных сигналов, распространяющихся по стенке трубы (далее “стеночные” сигналы). На это обращали внимание в работе [6], где производилось измерение потока жидкости в пластиковой трубе. При зондировании потока газа в металлической трубе ситуация усугубляется многократно. Коэффициент прохождения К при прохождении звука через границу “сталь–газ” при z2 $ \gg $ z1:
(2)
$K = {{4{{z}_{1}}} \mathord{\left/ {\vphantom {{4{{z}_{1}}} {{{z}_{2}}}}} \right. \kern-0em} {{{z}_{2}}}},$В сравнении с уменьшением сигнала, связанным с отражением на границах “сталь–газ”, снижение амплитуды прошедшего сигнала за счет поглощения при зондировании воздушного потока (см. Таблицу 1) невелико. При работе с метаном (важный для практики случай), в отличие от ситуации с поглощением в воздухе, имеет место существенное снижение амплитуды прошедшего сигнала, связанное с релаксационным механизмом поглощения звука. Теоретическая зависимость поглощения от частоты и давления представлена в работе [14].
В Таблице 1, в соответствии с зависимостью поглощения от давления и частоты, показано снижение уровня сигнала при зондировании воздуха и метана. Вычисления поглощения проводились при атмосферном давлении газа на частоте 500 кГц [14]. При атмосферном давлении метана измерения затруднены из-за низкого уровня принятого сигнала. Однако при увеличении давления коэффициент поглощения в метане существенно уменьшается и, при давлении несколько атмосфер, появляется возможность регистрации сигнала в метане. Снижение коэффициента поглощения возможно и с понижением частоты зондирования.
Вторая проблема устройств с накладными датчиками – это наличие сильной помехи, приходящей на приемник за счет того, что излученный (зондирующий) акустический сигнал распространяется не только сквозь поток, но и по стенке трубы [5]. Передающий датчик излучает в стенку трубы продольную волну, которая частично преобразуется в волну Лэмба и многократно циркулирует в стенке. Стеночная волна, пробегая по стенке, преобразуется снова в продольную волну, которую приемный датчик также принимает. В результате в момент приема полезного сигнала, прошедшего через газ, приемник принимает также и стеночный сигнал. Уровень сигнала, пришедшего на приемник по стенке, существенно больше уровня полезного сигнала даже в том случае, когда стеночный сигнал многократно циркулирует по стенке (рис. 3). За счет прохождения через границу “металл–газ” уровень полезного сигнала, дошедшего до приемника, ослабляется примерно на 60 дБ по сравнению с сигналом, прошедшим по стенке.
Сигнал, принятый приемником, можно записать следующим образом:
(3)
$\begin{gathered} {{U}_{{1,2}}}\left( t \right) = {{A}_{{1,2}}}{\text{cos}}\left( {{{\omega }}t + {{{{\psi }}}_{{1,2}}}} \right) + \\ + \,\,{{a}_{{1,2}}}\left( t \right){\text{cos}}\left( {{{\omega }}t + {{{{\varphi }}}_{{1,2}}}\left( t \right)} \right), \\ \end{gathered} $Таким образом, в соответствии с (3), в принимаемом сигнале присутствуют две компоненты, сильно отличающиеся по амплитуде: слабые полезные сигналы, прошедшие через газ, и мощные помехи от сигналов, прошедших по стенке. Наличие последних – основная проблема расходомеров с накладными датчиками.
Для построения корреляционной функции можно использовать как флуктуации фазы ${{\varphi }}\left( t \right)$, так и флуктуации амплитуды сигнала a(t). Сигналы с выходов фазовых детекторов для двух сигналов, стеночного и полезного, выражаются следующим образом:
(4)
${{U}_{{\sin }}}\left( t \right) = \overline {A\sin \left( {\omega t + \psi } \right) + a\left( t \right)\sin \left( {\omega t + \varphi \left( t \right)} \right)} ,$(5)
${{U}_{{\cos }}}\left( t \right) = \overline {A\cos \left( {\omega t + \psi } \right) + a\left( t \right)\cos \left( {\omega t + \varphi \left( t \right)} \right){\kern 1pt} } .$Черта сверху – усреднение по времени τхар $ \gg $ T $ \gg $ $\frac{{2\pi }}{\omega }$, где τхар – характерное время флуктуаций скорости потока. В результате усреднения устраняется сигнал с удвоенной частотой. Остаются постоянная составляющая, связанная со стеночным сигналом, и переменная составляющая, связанная с флуктуациями сигнала, прошедшего через турбулентный поток. Удаляя постоянную составляющую, теперь легко разделить амплитудные и фазовые флуктуации. В каждом канале получаются низкочастотные сигналы следующего вида:
(6)
${{U}_{{{\text{нч}},{\text{sin}},1,2}}} = a{{\left( t \right)}_{{1,2}}}\sin \left[ {{{\varphi }_{{1,2}}}\left( t \right) + {{\psi }_{{1,2}}}} \right],$(7)
${{U}_{{{\text{нч}},{\text{cos}},1,2}}} = a{{\left( t \right)}_{{1,2}}}\cos \left[ {{{\varphi }_{{1,2}}}\left( t \right) + {{\psi }_{{1,2}}}} \right].$В случае корреляционной обработки выделенных “фазовых” флуктуаций возникают различающиеся набеги фаз в каналах. Это может происходить из-за возможной небольшой разницы внутренних диаметров трубы, а также из-за разности частотных характеристик преобразователей в каналах. Например, при диаметре трубы 0.1 м и при разнице внутренних диаметров трубы в 0.5% (вполне реальная разница!) на частоте 500 кГц разница фазовых набегов в каналах порядка 1.5π. В результате этого происходит изменение взаимно-корреляционной функции, вплоть до инверсии пика. Подобная ситуация представлена на рис. 2. В промежуточном случае, когда сдвиг фазы порядка π/2, определить задержку становится невозможным. Разница в каналах также может происходить из-за небольшой разницы резонансных частот преобразователей.

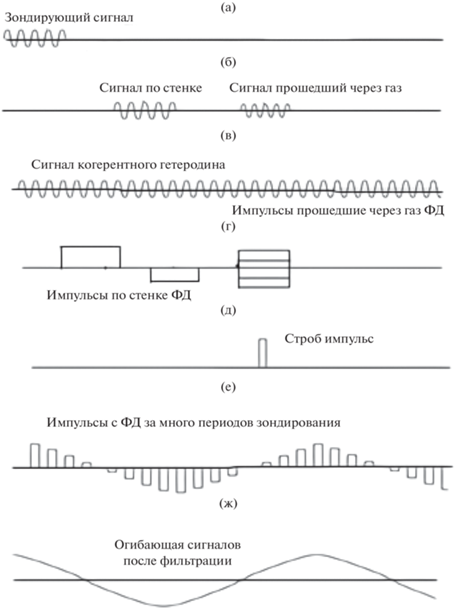
Рис. 3.
Осциллограммы сигналов в импульсно-когерентном расходомере. (а) – Зондирующий сигнал, (б) – сигналы, принятые приемником, (в) – сигнал когерентного гетеродина, (г) – импульсы с фазового детектора сигналов, прошедших по стенке и через газ, (д) – строб-импульс, (е) – сигналы, запомненные в УВХ за несколько периодов, (ж) – огибающая сигнала после детектировании.
Сделаем оценку изменения фазы при прохождении через турбулентный поток:
(8)
${{\varphi }}\left( t \right) = \frac{{2{{\pi }}fD}}{{c\left( {1 + \frac{{v\left( t \right)}}{с}} \right)}} \approx \frac{{2{{\pi }}fD}}{c}\left( {1--{\text{\;}}\frac{{v\left( t \right)}}{c}} \right),$Так, при измерении потока воздуха в трубе (с = = 330 м/с) при f = 500 кГц, D = 0.1 м, для скорости $v\left( t \right) = 2$ м/с и уровня турбулентности 5% (амплитуды продольных и поперечных флуктуаций скорости равны [12, 13]), из (9) при данных параметрах получим $\Delta {{\varphi }}\left( t \right) \sim \pi $. При увеличении скорости потока при измерении фазы возникает неоднозначность в определения фазы. Таким образом, использование измерения флуктуаций фазы непригодно для реальных условий. Поэтому для вычисления взаимно корреляционной функции далее используются амплитудные флуктуации. Однако при непосредственном детектировании сигнала U(t) и после устранения постоянной составляющей и сигналов с удвоенной частотой несущей сигнал на выходе имеет вид:
(10)
${{U}_{{1,2{\text{дет}}}}}\left( t \right) = {{a}_{{1,2}}}\left( t \right){{A}_{{1,2}}}\cos \left[ {{{\psi }_{{1,2}}}\left( t \right)--~{{\varphi }_{{1,2}}}\left( t \right)} \right].$Как видно из выражения (10), при детектировании флуктуации амплитуды и фазы сложно связаны. Кроме того, амплитуда зависит от фазы стеночного сигнала. Взаимно корреляционная функция при этом сложно (неоднозначно) зависит от скорости потока. Поэтому флуктуации требуется разделить. Это можно сделать с помощью фазового детектирования и последующего суммирования квадратур сигналов в каждом из каналов. Подобная схема выделения амплитудных флуктуаций представлена в работе [6], где проводились измерения скорости жидкости в пластиковых и стеклянных трубках. Измерения проводились при использовании непрерывного зондирующего сигнала.
Сигналы, прошедшие в разных частях поперечника ультразвукового пучка, приобретают фазовые флуктуации. Эти сигналы, дойдя до приемного датчика, суммируются как сигналы со случайными фазами, что приводит к флуктуациям амплитуды. Сигнал, принимаемый датчиком, изменяется по амплитуде и в какие-то моменты может полностью исчезать. Таким образом, в отличие от сигналов, распространяющихся по стенке, амплитуда сигнала, прошедшего через газ, сильно флуктуирует. Это позволяет выделить полезный (переменный по времени) сигнал на фоне помех, связанных со стеночными сигналами (постоянная составляющая продетектированного сигнала). В данной работе рассмотрены и продемонстрированы варианты снижения помех, связанных с возникновением стеночных сигналов, в том числе:
– представлена схема корреляционного расходомера, использующая импульсно-когерентный режим локации, который существенно улучшает отношение сигнал/помеха и расширяет динамический диапазон принимаемых сигналов;
– показана возможность устранения периодических помех, связанных с вибрацией стенки трубы.
ИМПУЛЬСНЫЙ РЕЖИМ ЗОНДИРОВАНИЯ
Хорошим действенным методом увеличения уровня полезного сигнала и снижения влияния стеночных сигналов является применение импульсного режима зондирования. Важным преимуществом импульсного режима является возможность увеличения амплитуды зондирующего сигнала по сравнению с амплитудой зондирования при непрерывном излучении. В непрерывном режиме увеличение амплитуды зондирующего сигнала приводит к перегреву излучающих датчиков и даже к выходу их из строя. В импульсном режиме можно (за счет скважности) существенно увеличить амплитуду зондирующего сигнала. В нашем случае используются зондирующие импульсы с длительностью 8–10 периодов несущей частоты и с амплитудой до 150 В. Это во много раз больше возможного значении амплитуды при непрерывном зондирующем сигнале. В обоих случаях частотная полоса и, соответственно, КПД пьезопреобразователей одинаковы, т.к. они нагружены на металлическую поверхность и тем самым демпфированы естественным образом. Необходимая частотная полоса полезного сигнала после детектирования, и, соответственно, уровень шума приемного усилителя, должна определяться временем пролета турбулентных структур через ультразвуковые пучки и одинакова при непрерывном или импульсном режимах зондировании.
В работе [6], а также в приборе CTF878 используется режим с непрерывным излучением. В этом случае сигналы, распространяющиеся по стенке, суммируются в приемном устройстве. Поэтому отношение “полезный сигнал/помеха” мал. В импульсном режиме это отношение существенно выше, т.к. сигналы помехи принимаются только в момент, когда приходит полезный сигнал, прошедший через газ. Сигналы, пришедшие в другие моменты времени, блокируются и не поступают на дальнейшую обработку. Таким образом, существенно повышается отношение сигнал/помеха [4].
Импульсный режим является основным отличием схемы нашего расходомера от прибора, описанного в [6]. Важным достоинством импульсного режима, кроме того, является возможность работы двух приемных каналов независимо друг от друга на одной частоте. Это становится возможным за счет того, что при двух приемных трактах сигналы попадают на приемники в разные моменты времени.
В нашем случае используется так называемый импульсно-когерентный режим локации (см., например, [15, 4 ]). Принцип работы импульсно-когерентного зондирования иллюстрируется на рис. 3.
Частота повторения зондирующих импульсов Fповт выбирается из следующих соображений. Период должен быть не менее $\frac{1}{{{{F}_{{{\text{повт}}}}}}} = {{T}_{{{\text{повт}}}}} > \frac{D}{c}$. С другой стороны, частота повторения должна быть как минимум вдвое выше максимальной частоты флуктуаций, определяемой шириной спектра флуктуации. Полагая, что размеры крупномасштабных структур порядка $\frac{D}{2}$ и скорость потока V0, получаем ${{F}_{{{\text{повт}}}}} > \frac{{4{{V}_{0}}}}{D}$ . Таким образом, частота повторения должна быть в диапазоне:
Зададим в качестве примера следующие значения: D = 0.1 м, V0 = 50 м/с; в этом случае частота повторения 1 кГц < Fповт < 3 кГц.
Функциональная схема корреляционного расходомера, работающего в импульсном режиме, показана на рис. 4. Зондирование потока производится радиоимпульсами, “вырезанными” из сигнала гетеродина рис. 3а. Прошедшие принятые сигналы (рис. 3б) после усиления поступают на фазовые детекторы ФД1 и ФД2, на которые поступают сигналы гетеродинов (рис. 3в). На выходах ФД появляются видеоимпульсы, амплитуда которых пропорциональна амплитуде усиленного сигнала, умноженного на косинус (или синус) сдвига фазы между сигналом гетеродина и принятым сигналом.
Рис. 4.
Функциональная схема корреляционного расходомера, работающего в импульсном режиме. УМ – усилитель мощности зондирующего сигнала, УВЧ – усилитель высокой частоты (приемник), ФД1 и ФД2 – фазовые детекторы, УВХ – устройства выборки-хранения.
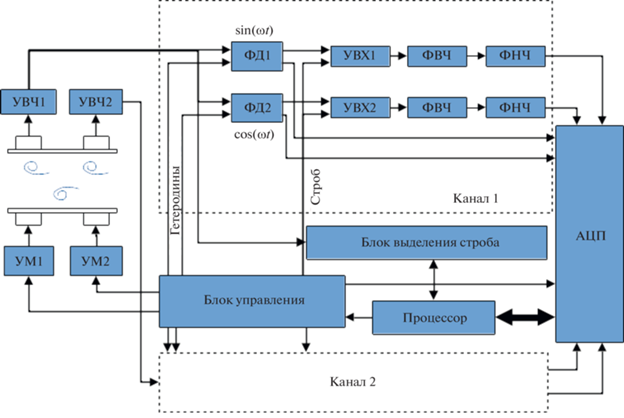
Для дальнейшей обработки в каждом канале используются два гетеродинных сигнала, сдвинутых один от другого по фазе на 90°. Это необходимо для того, чтобы избежать появления слепых фаз, которые появляются в результате фазового детектирования. После выделения сигналов по команде строб-импульса устройство выборки-хранения (УВХ) запоминает величину сигнала на период повторения импульсов, до следующего такта зондирования. Стационарные сигналы (стеночные) на выходе УВХ выделяются в виде постоянной составляющей и не проходят на дальнейшую обработку. Полезные сигналы, прошедшие через турбулентный поток, проходят далее, фильтруются ФНЧ и поступают на АЦП. Таким образом, здесь осуществляется разделение стационарных стеночных сигналов и полезных сигналов, прошедших через газ. В результате, после фильтрации, на входы АЦП из каждого канала передаются два уже непрерывных сигнала, которые и обрабатывают далее.
КАК ОПРЕДЕЛИТЬ ПОЛОЖЕНИЕ СТРОБ-ИМПУЛЬСА
Особенностью данной схемы является автоматическое определение положения измерительного объема, т.е. положение стробирующего импульса. Время распространения ультразвукового импульса через газ в трубе неизвестно, когда не известен состав газа, его температура и влажность. Поэтому для выделения полезного сигнала из смеси “стеночных” сигналов требуется определить положение (задержку от начала зондирования) строб-импульса. Невозможно также обнаружить по осциллограмме момент прихода полезного сигнала (рис. 5а), т.к. полезный сигнал тонет в стеночных сигналах. Необходимо правильно установить положение строб-импульса и в дальнейшем поддерживать его задержку при изменении скорости звука.
Рис. 5.
Осциллограммы сигналов для определения положения импульса стробирования. (а) – Радиосигнал с выхода фазового детектора, (б) – видеосигнал с выхода фазового детектора, (в) – сигнал после череспериодного вычитания, (г) – строб-импульс.

Для реализации используется режим череспериодного вычитания сигналов. Подобный режим селекции движущих целей применяется в радиолокации. Реализация череспериодного режима производится следующим образом. Сигнал с выхода фазового детектора запоминается и вычитается через период повторения, после следующей посылки импульсов.
Стационарные стеночные сигналы вычитаются и подавляются, а сигналы, прошедшие через турбулентный поток из-за флуктуации, выделяются. Затем формируется строб-импульс, используемый для выделения полезного сигнала из последовательности принятых импульсов. Этот режим является вспомогательным, включается при начальной установке прибора и далее включается периодически.
На осциллограмме рис. 5а показана последовательность принятых импульсов (полезный сигнал здесь не виден). На рис. 5б показана осциллограмма после фазового детектора, на рис. 5в представлен результат череспериодного вычитания. На рис. 5в показан выделенный в результате череспериодного вычитания импульс, определяющий положение строб-импульса, а на рис. 5г – собственно выделенный строб импульс, который используется для выделения полезного сигнала из смеси сигналов. Таким образом, выделенный стробирующий импульс из смеси стеночных импульсов далее используется для выделения полезного сигнала.
ЦИФРОВАЯ ОБРАБОТКА ПРОДЕТЕКТИРОВАННЫХ СИГНАЛОВ
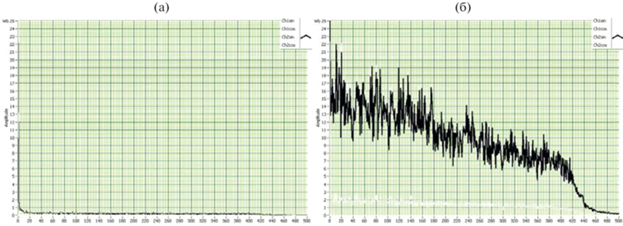
Оцифрованные АЦП сигналы далее обрабатывают следующим образом: в соответствии с выражением (12) вычисляются текущие амплитуды сигналов в обоих каналах. Далее производится динамическая фильтрация сигналов. Спектры сигналов представлены на рис. 6. Для этого производится анализ ширины спектра сигнала и далее производится фильтрация сигналов в выбранном частотном диапазоне, в том числе, удаление помех, связанных с вибрацией стенки трубы. Из рис. 6 видно, что интенсивность полезного сигнала существенно больше интенсивности шума, что достигается благодаря применению импульсного режима с большой амплитудой зондирующего сигнала.
Рис. 6.
Спектры сигналов после фильтрации: (а) – спектр сигнала при отсутствии потока (шум), (б) – спектр пульсаций амплитуды при наличии потока.
Для того чтобы корреляционная функция не изменялась при изменении скорости звука в газе, используется взаимно-корреляционная обработка огибающих сигналов. Форма взаимно корреляционной функции была показана на рис. 1в. Ситуация, подобная рис. 2, невозможна при обработке сигналов огибающей. Огибающая вычисляется в следующим виде:
(13)
$A\left( t \right) = \sqrt {U_{{{\text{нч}},{\text{sin}}}}^{2} + U_{{{\text{нч}},{\text{cos}}}}^{2}} .$Функция взаимной корреляции амплитудных флуктуаций вычисляется в соответствии с выражением:
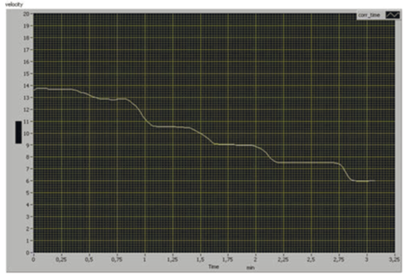
Далее производится накопление реализаций взаимно корреляционных функций для повышения отношения сигнал/шум. Необходимость накопления связана с тем, что мгновенные реализации ФВК флуктуируют из-за флуктуаций потока. По полученной усредненной ФВК определяется положение пика функции, а затем вычисляется скорость в соответствии с выражением (1) и строится осциллограмма скорости потока. Кроме того, для устранения случайных выбросов в осциллограммах применяется медианная фильтрация. На рис. 7 в качестве иллюстрации представлена осциллограмма измеряемой скорости потока при ступенчатом изменении расхода.
ПОДАВЛЕНИЕ СТЕНОЧНЫХ СИГНАЛОВ С ПОМОЩЬЮ ДЕМПФИРУЮЩИХ НАКЛАДОК
Как уже говорилось, стационарные стеночные сигналы в результате обработки выделяются в виде постоянной составляющей, которая затем легко отделяется. Однако стеночные сигналы перестают быть стационарными, например, при наличии вибраций стенки, а также при появлении капель жидкости на внутренней поверхности трубы. В обоих случаях происходит амплитудная и фазовая модуляции стеночных сигналов. В результате, наряду с полезным флуктуирующим сигналом, прошедшим через газ, выделяются и сильные помехи в виде переменных сигналов, которые существенно затрудняют проведение измерений, а иногда даже исключают их возможность.
Поэтому желательно дополнительно к импульсному режиму подавить стеночные сигналы, распространяющиеся по стенке. Это можно сделать, демпфируя трубу с помощью наружных накладных демпферов, например, на основе резиновых материалов. На рис. 8 показаны осциллограммы стеночных сигналов до и после наложения на трубу демпфирующего материала.
Рис. 8.
Подавление стеночных сигналов демпфированием стенки трубы. (а) – Стеночные сигналы без демпфирования стенки трубы; (б) – через нескольких часов после наложения демпфера при постепенном затвердевании демпфирующего покрытия; (в) – через сутки после наложения демпфера.

В эксперименте удается уменьшить уровень стеночных помех более чем на порядок с помощью покрытий на основе цемента. Недостатком данного метода является довольно продолжительная процедура изготовления такого демпфера, занимающая десятки часов, и, вследствие этого, может быть использована лишь при долговременных стационарных условиях измерений. Естественно, существуют и другие материалы для демпфирования, но, как показывают эксперименты, они имеют меньший эффект подавления. Кроме того, как правило, эти материалы содержат know-how, которые в рекламах не оглашаются.
ПОДАВЛЕНИЕ ПЕРИОДИЧЕСКИХ ПОМЕХ
Очень часто в реальных ситуациях имеют место вибрации трубы, например, при работе компрессоров. Естественно, функция взаимной корреляции при этом существенно изменяется. Вибрации стенок трубы приводят к модуляции акустического контакта между стенкой трубы и установленными на ней датчиками. В результате этого сигналы, прошедшие по вибрирующей стенке, становятся нестационарными. На рис. 9 показан образец спектра принимаемого сигнала при наличии вибраций трубы. В данном случае источником вибрации был работающий компрессор.
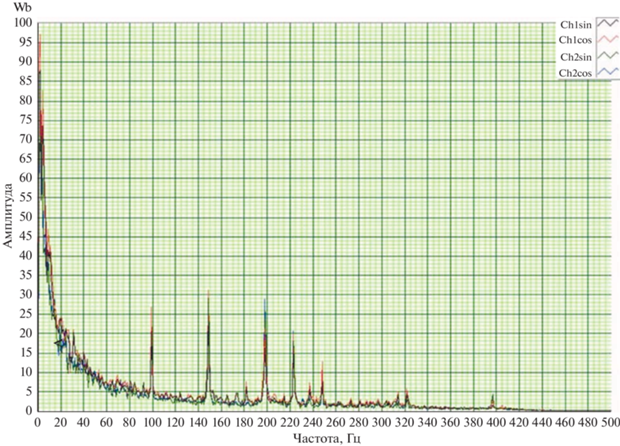
Спектральные составляющие помех, возникающих из-за вибраций, как правило, узкополосные и представлены в виде острых пиков (выбросов) на спектрограмме.
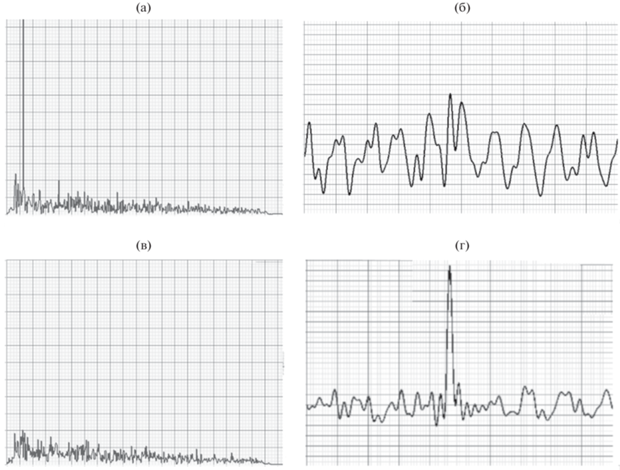
На рис. 10 продемонстрированы результаты лабораторного эксперимента по устранению вибрационной помехи. Помеху при этом генерировал вибратор вибростенда. На рис. 10 показаны спектры и взаимно корреляционные функции при наличии вибрационной помехи. Подавление пиков помехи в спектре производилось программным образом. Как видно из рис. 10б, главный корреляционный пик не выделяется и измерения невозможны. При программном подавлении помехи пик ФВК хорошо наблюдается (рис. 10г) и может быть использован при измерении скорости.
ИЗМЕРЕНИЯ В УСЛОВИЯХ ПОЯВЛЕНИЯ КАПЕЛЬ ЖИДКОСТИ В ПОТОКЕ
Появление капель жидкости в потоке является довольно частой ситуацией, особенно при измерениях расхода попутного газа. Появление небольшого количества мелких капель практически не влияет на форму функции корреляции. Более того, амплитуда пика функции взаимной корреляции может даже увеличиваться. При увеличении количества жидких частиц увеличиваются боковые ФВК (рис. 11).
Рис. 11.
(а) – ФВК при отсутствии капель; (б) – ФВК при наличии капель в потоке, увеличение боковых лепестков ФВК, (в) – ФВК при наличии потока жидкости по стенке.
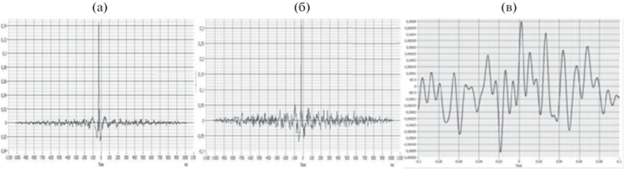
С ростом количества воды в потоке, когда на внутренней стенке трубы появляется пленка воды, пик ФВК пропадает. Появление капель на стенке трубы приводит к изменению распространения стеночных сигналов. Турбулентный поток газа, действующий на капли на стенке, приводит к модуляции стеночного сигнала, который становится нестационарным. На рис. 11в показан вид функции взаимной корреляции, полученной при наличии сильных потоков жидкости на внутренней стенке трубы.
Очевидно, что для измерений в условиях появления капель жидкости в потоке, как и в случае вибраций стенки, необходимо как можно больше ослаблять стеночные сигналы.
РЕЗУЛЬТАТЫ И ВЫВОДЫ
Рассмотрены и продемонстрированы варианты снижения помех, связанных с возникновением стеночных сигналов, в том числе:
– представлена схема корреляционного расходомера, использующая импульсно-когерентный режим локации и существенно улучшающая отношение сигнал/шум и сигнал/помеха и расширяющая динамический диапазон принимаемых сигналов;
– показана возможность устранения периодических помех, связанных с вибрацией стенки трубы;
– продемонстрирована возможность работы с газовыми течениями, содержащими капли жидкости.
Работа профинансирована Министерством науки и высшего образования РФ в рамках государственного задания ИПФ РАН, проект № 0030-2021-0014.
Список литературы
Lynnworth L.C., Yi Liu. Ultrasonic flowmeters: Half-century progress report, 1955-2005 // Ultrasonics. 2006. V. 44. P. 1371–1378.
Биргер Г.И., Бражников Н.И. Ультразвуковые расходомеры. М.: Металлургия, 1964. 382 с.
Мансфельд А.Д., Трусилло С.В., Агуреев В.А., Карюк В.М. Способ измерения расхода газа в трубопроводах и устройство для его осуществления // Патент РФ № 2313068, 2007, Оп. в Б.И. № 35.
Мансфельд А.Д., Санин А.Г., Волков Г.П., Беляев Р.В., Мороскин Д.В. Ультразвуковые расходомеры газа с накладными датчиками // Ученые Записки Физического Факультета МГУ. 2017. № 5. 1751201. С. 1–4.
Мансфельд А.Д., Волков Г.П., Агуреев В.А., Трусилло С.В., Карюк В.М., Мороскин Д.В. Повышение помехозащищенности ультразвуковых газовых расходомеров с накладными датчиками // Датчики и системы. 2011. № 2. С. 28–32.
Coulthard J. Ultrasonic cross-correlation flowmeters // Ultrasonics. 1973. V. 11. № 2. P. 83–88.
Jacobson S.A., Denbigh P.N., Naude D.E.H. A new method for demodulation of ultrasonic signals for cross-correlation flowmeters // Ultrasonics. 1985. V. 23. № 3. P. 128–131.
Worch A. A clamp-on ultrasonic cross correlation flow meter for one-phase flow // Measurement Science and Technology. 1998. V. 9. P. 622–630.
Lysak P.D., Jenkins D.M., Capone D.E., Brown W.L. Analitical model of an ultrasonic cross-correlation flow meter. Pt. 1: Stochastic modeling of turbulence // Flow measurement and Instrumentation. 2008. V. 19. P. 1–7.
Мансфельд А.Д., Волков Г.П., Беляев Р.В., Санин А.Г., Громов П.Р., Климкина Н.Е. Особенности измерения скорости потока газа в трубах ультразвуковым корреляционным методом // Акуст. журн. 2021. Т. 67. № 2. С. 203–209.
Езерский A.Б., Громов П.Р., Соустов П.Л., Чернов В.В. Акустическая диагностика вихревой структуры, возникающей при обтекании воздушным потоком решетки цилиндров // Акуст. журн. 2005. Т. 51. № 2. С. 212–220.
Шлихтинг Г. Теория пограничного слоя / Пер. Вольперта Г.А. под ред. Лойцанского Л.Г. М: Наука, 1969. 724 с.
Брэдшоу П. Введение в турбулентность и ее измерение / Пер. с англ. под ред. Глушко Г.С. М.: Мир, 1974. 279 с.
Dain Y., Lueptow R.M. Acoustic attenuation in a three-gas mixture: Results // J. Acoust. Soc. Am. December 2001. V. 110. № 6. P. 2974–2979. https://doi.org/10.1121/1.1413999
Финкельштейн М.И. Основы радиолокации: Учебник для вузов. Издание 2-е, перераб. и дополн. М: Радио и связь, 1983. 536 с.
Дополнительные материалы отсутствуют.
Инструменты
Акустический журнал