

Физика Земли, 2023, № 2, стр. 224-240
Переходный процесс на акваториях морского шельфа при работе с осевой и экваториальной электрическими установками и полевой эксперимент
Е. В. Агеенков 1, *, А. А. Ситников 2, **, В. В. Владимиров 2, И. Ю. Пестерев 2
1 Институт нефтегазовой геологии и геофизики им. А.А. Трофимука СО РАН
г. Новосибирск, Россия
2 ООО “Сибирская геофизическая научно-производственная компания”
г. Иркутск, Россия
* E-mail: AgeenkovEV@ipgg.sbras.ru
** E-mail: AAS@dnme.ru
Поступила в редакцию 22.03.2022
После доработки 16.08.2022
Принята к публикации 18.08.2022
- EDN: LGSTNS
- DOI: 10.31857/S0002333723020011
Аннотация
Рассмотрено изменение нестационарного электромагнитного (ЭМ) сигнала над проводящей поляризующейся землей, перекрытой морской водой, на измерительных линиях, расположенных в осевой и экваториальной области источника – импульсной горизонтальной электрической линии (ГЭЛ). Во время работы ГЭЛ в импульсном режиме в среде создается гальванический и вихревой ток. Если среда, на которую воздействует ГЭЛ гетерогенна, то оба влияния приводят к разделению связанных зарядов. После отключения источника, в такой среде возникают релаксационные (деполяризационные) процессы различной природы, проявляющиеся, в частности, в виде ЭМ сигнала. В итоге переходный процесс, регистрируемый заземленной линией после импульсного воздействия ГЭЛ, является, по меньшей мере, суперпозицией трех составляющих: становления ЭМ поля (СП), гальванически вызванной поляризации (ВПГ) и индукционно вызванной поляризации (ВПИ). Сигнал ВП, по мере уменьшения составляющей СП в общем сигнале, проявляется в переходном процессе изменением временных характеристик спада, вплоть до смены полярности сигнала. Как показано ранее численным моделированием для осевой области ГЭЛ, проявление сигнала ВПИ на поздних временах переходного процесса, для большей части геоэлектрических условий суши, незаметно на фоне проявления ВПГ [Агеенков и др., 2020]. Так же на основе этих расчетов видно, что в осевой области сигнал ВПГ проявляется в виде замедления скорости переходного процесса, а сигнал ВПИ – ускорения скорости спада вплоть до смены знака сигнала. При проведении полевых измерений аквальным дифференциально-нормированным методом электроразведки (АДНМЭ), использующим осевые электрические установки, фиксируются переходные процессы с изменением временных характеристик спада: он становится более затянутым или напротив, протекает быстрее и может сопровождаться сменой полярности сигнала. Т.е. отмечены разные по виду измеряемые сигналы, которые предположительно связаны с проявлением сигналов ВПГ или ВПИ. Актуальность публикации заключается в необходимости объяснить результаты натурных измерений, выполненных на акватории, понять связь протекания переходного процесса с геоэлектрическими условиями, существующими на акваториях. И в общем описать формирование переходной характеристики среды в осевой и экваториальной области ГЭЛ для условий аквальной геоэлектрики. Исследован расчетный сигнал для осевых и экваториальных электрических установок с несколькими разносами в условиях акватории морского шельфа при расположении установки на поверхности, внутри водной толщи, и на дне акватории – на геологических породах. Для осевых установок выполнены расчеты величин, использующихся в АДНМЭ: переходного процесса ΔU(t), конечной разности переходного процесса Δ2U(t) и трансформанты P1(t) – отношения Δ2U(t) к ΔU(t). Для экваториальных установок выполнены расчеты сигнала ΔU(t). Проведено сравнение сигналов 2-х слойной модели среды с поляризующимся и неполяризующимся основаниями.
ВВЕДЕНИЕ
Горизонтальная электрическая линия является одним из контролируемых излучателей, использующихся в электроразведке для создания искусственного ЭМ поля, воздействующего на геологическую среду. Отклик на это воздействие связан с внутренним строением среды. В импульсной электроразведке регистрируется процесс установления геоэлектромагнитного поля, и по его свойствам судят о распределении геоэлектрических параметров в Земле.
Выделяют два способа воздействия на среду: гальванический ток с заземлений и создание индуктивной связи с токовым контуром. Такой излучатель как токовая петля создает только индуктивную связь с объектом исследования. Другие излучатели: круговой электрический диполь на поверхности Земли и вертикальная электрическая линия внутри Земли, в одномерной среде, подавляют свое индуктивное воздействие на нее и считаются только гальваническими источниками [Могилатов, 2014]. ГЭЛ является излучателем смешанного типа [там же], воздействуя на Землю и гальваническим током, и индуктивной связью с токовым контуром. Гальванический ток стекает и вытекает из Земли через заземления. Токовый контур состоит из токоподводящих линий, соединяющих заземления с источником энергии, и гальванического тока, распределенного в геологической среде. Измерения горизонтальной компоненты электрического поля (Ex) осуществляются также заземленной линией.
Если среда, на которую воздействует ГЭЛ, гетерогенна, то и влияние гальванического тока, и индуктивная связь среды с токовым контуром приводят к разделению связанных зарядов. После ослабления поляризующего воздействия, в такой среде возникает совокупность релаксационных (деполяризационных) процессов различной природы, проявляющихся, в частности, в виде ЭМ сигнала. В итоге переходный процесс, регистрируемый заземленной линией после импульсного воздействия ГЭЛ, является, по меньшей мере, суперпозицией трех составляющих: СП, ВПГ и ВПИ. Составляющие, связанные с ВП, хоть и вызваны разным воздействием источника, определяются распределением одних и тех же поляризационных свойств среды.
ЭМ сигнал релаксационных процессов при расчетах учитывается введением частотно зависимого УЭС [Pelton et al., 1978] или использованием временной зависимости спада ВП [Комаров,1980; Кормильцев, 1980].
В полевых измерениях переходного процесса сигнал становления визуально выделяется, и его поведение хорошо изучено и описано в работах [Табаровский, 1975; Матвеев, 1990; Strack, Vozoff, 1996; West, Macnae, 2008; и др.]. Сигнал ВП, связанный с гальваническим током во время импульса, тоже визуально заметен в переходном процессе во время поздней стадии становления, и хорошо изучен в методе ВП [Комаров, 1980] и других методах [Легейдо и др., 1995; 1997; Моисеев, 2002]. В то же время сигнал ВП, связанный с вихревым током, индуцированным ГЭЛ, для большинства геоэлектрических разрезов незаметен в переходном процессе, и эта тема незначительно затрагивается в литературе по электроразведке [Легейдо, 1998; Моисеев, 2002].
Ранее опубликованы теоретические исследования поведения переходного процесса горизонтального электрического дипля (ГЭД) [Мезенцев, 1990; Левченко, 1992]. В этих работах показана теоретическая возможность смены знака сигнала для осевой установки над горизонтально-слоистой средой в присутствии неполяризующегося перекрытия, если величина разноса (r) меньше или порядка мощности перекрытия (h1). При зондированиях с экваториальной дипольной установкой для 3-х слойных моделей, когда УЭС промежуточного слоя отличается от сопротивления вмещающей среды, отмечается усложнение характера кривых спада Ex: переходный процесс после выключения тока может быть знакопостоянным или сопровождаться одно-, двух- и даже трехкратной сменой знака сигнала. Это объясняется, в первую очередь, не взаимодействием токов индукции и ВП, а сложным характером поведения вихревой составляющей суммарного поля.
Один из вариантов полевой экваториальной установки и ее сигналов становления описан в работе [Петров, 2000]. Натурные исследования с ГЭЛ на акваториях проводились с конца 80-х гг. с экваториальной установкой (см. например, [Вишняков и др., 1988]), с симметричной и дипольной [Небрат, 1990].
В публикации [Кожевников, Антонов, 2009] авторы сравнивают индукционный и гальванический источник, использующиеся в методе переходных процессов (МПП) и в методе вызванной поляризации (ВП) для воздействия на геологическую среду, которой свойственно поляризоваться после внешнего ЭМ воздействия. Индукционный способ возбуждения и измерения процессов ВП, несмотря на очевидные технологические преимущества, считается заведомо менее эффективным по сравнению с гальваническим. В масштабе времени, в котором протекают медленные процессы ВП, первичное вихревое электрическое поле, создаваемое при выключении установившегося тока в генераторной петле, воздействует на среду относительно недолго. За это время среда поляризуется незначительно. Если поляризация устанавливается медленно, скорость затухания токов ВП и создаваемого им магнитного поля мала. Поэтому, в соответствии с законом Фарадея, магнитное поле этих токов индуцирует в приемной петле ЭДС низкого уровня. Таким образом, по сравнению с гальваническим методом ВП [Комаров, 1980] при возбуждении и измерении ВП индукционным способом имеет место двойная “потеря” эффективности.
Можно предположить, что воздействие гальванического и вихревого токов будет аналогично по интенсивности и продолжительности, описанному выше для гальванического и индуктивного источников. Поэтому, при натурных измерениях более интенсивный и продолжительный сигнал гальванически вызванной поляризации оставляет “на втором плане” сигнал индукционно вызванной поляризации.
Ранее, для условий наземных измерений численным экспериментом показана, теоретическая возможность распознавания ВПИ в переходном процессе по визуальному признаку [Агеенков и др., 2020]. Была использована синтетическая утрированная модель из класса одномерных моделей, в которой проводящий сильно поляризующийся слой был помещен под проводящий и высокоомный неполяризующиеся горизонты.
Однако ситуация изменяется для условий акваторий шельфа. Численными расчетами для таких условий [Агеенков и др., 2021; 2022] было показано проявление сигнала ВПИ для геоэлектрических моделей, когда проводящая неполяризующаяся вода перекрывает проводящее поляризующееся геологическое основание.
Эти теоретические расчеты объясняют результаты показанных ниже натурных измерений, выполненных на акватории. Когда во время измерений переходного процесса электрической установкой в осевой области источника фиксируются сигналы с изменением скорости спада как с ее замедлением, так и с ускорением вплоть до смены знака в поздней стадии переходного процесса (т.е. разные по виду измеряемые сигналы).
Актуальность публикации состоит в необходимости объяснения результатов натурных измерений, выполненных на акватории, понимании связи протекания переходного процесса с геоэлектрическими условиями, существующими на акваториях, позволяющими проявляться сигналу ВПИ в измерениях заземленной линией и в общем описании формирования переходной характеристики среды в осевой и экваториальной области источника после импульсного воздействия ГЭЛ для геоэлектрических условий акваторий.
В работе исследован расчетный сигнал для осевых и экваториальных электрических установок с несколькими разносами в условиях акваторий морского шельфа при расположении установки на поверхности и внутри водной толщи и на дне акватории – на геологических образованиях. Для осевых установок выполнены расчеты величин, использующихся в АДНМЭ: переходный процесс ΔU(t), конечная разность переходного процесса Δ2U(t) и трансформанта P1(t) – отношение Δ2U(t) к ΔU(t). Для экваториальных установок выполнены расчеты переходного процесса ΔU(t).
Проведено сравнение сигналов для неполяризующейся модели и модели с поляризующимся основанием. Определены характеристики, влияющие на вид переходного процесса – это высота установки над геологическими образованиями и разнос. Проведенное исследование позволяет сделать выводы: для условий акваторий в осевой области ГЭЛ сигнал ВП двояко проявляется в переходном процессе как связанный с гальваническим (ВПГ), так и с вихревым током (ВПИ). Причина этому – особая среда, которую создают сильно проводящая вода и проводящее поляризующееся основание (геологические породы). Такая среда позволяет в переходном процессе, созданном заземленной линией, проявляться сигналу ВПИ. Это происходит для измерений в осевой области электрического источника при определенной высоте установки над геологическими образованиями. Если установка находится непосредственно на геологических образованиях, то сигнал ВП проявляется как сигнал ВПГ. Ранее, при практических измерениях, проявление ВПИ рассматривалось как проявление помех. Но этот сигнал моделируемый и его можно рассматривать как информацию о ВП, равную информации об этом процессе, извлекаемую из сигнала гальванически вызванной поляризации. Показаны полевые измерения АДНМЭ с разным визуальным протеканием сигнала, полученным во время переходного процесса. Для экваториальных установок показано, что проявление ВПГ и ВПИ в переходном процессе одинаково, в виде сигнала противоположной полярности относительно сигнала СП.
РЕЗУЛЬТАТЫ НАТУРНЫХ ИЗМЕРЕНИЙ АДНМЭ, ВЫПОЛНЕННЫХ НА АКВАТОРИЯХ
Во время переходного процесса существенное влияние на измерения оказывает сигнал СП. При измерениях во временной области после выключения тока в течение некоторого времени происходит становление ЭМ поля в земле и для определенных времен наблюдается суперпозиция индукционных и поляризационных эффектов [Уэйт, 1987; Антонов, Шеин, 2007; 2008]. Снижение влияния СП позволяет подчеркнуть сигнал ВП. Один из способов уменьшения проявления сигнала индукции в сигнале переходного процесса, при работе в осевой области ГЭЛ – трансформация измерений 3-х электродной измерительной линии M1M2M3. Такие измерительные линии и трансформанты используются для изучения ВП при наземных измерениях ДНМЭ [Легейдо и др., 1995; 1997; Легейдо, 1998; Агеенков и др., 2012].
На акваториях АДНМЭ использует осевые установки с длиной источника от 300 до 1000 м, ряд 3-х электродных измерительных линий от 200 до 600 м с разносом от 600 до 1500 м [Ситников и др., 2017; Марков и др., 2021]. На каждой паре измерительных линий M1M2M3 проводятся измерения сигнала переходного процесса ΔU(t) (1) между электродами M1–M3 и конечной разности переходного процесса Δ2U(t) (2) между электродами M1–M2 и M2–M3. После обработки сигналов ΔU(t) и Δ2U(t), рассчитывается отношение конечной разности сигнала переходного процесса к сигналу переходного процесса – трансформанта P1(t) на линии M1M2M3 (3) [Легейдо и др., 1995; 1997; Легейдо, 1998].
(1)
$\Delta U{{\left( t \right)}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{3}}}}}}} = \,\,~\Delta U{{\left( t \right)}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}}}} + ~\Delta U{{\left( t \right)}_{{{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}},$(2)
${{\Delta }^{2}}U{{\left( t \right)}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}} = \,\,~\Delta U{{\left( t \right)}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}}}} - \,\,~\Delta U{{\left( t \right)}_{{{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}},$(3)
$\begin{gathered} P1{{\left( t \right)}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}} = \,\,~\frac{{{{\Delta }^{2}}U{{{\left( t \right)}}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}}}}{{\Delta U{{{\left( t \right)}}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{3}}}}}}}}} = \\ = \,\,~\frac{{\Delta U{{{\left( t \right)}}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}}}} - ~\Delta U{{{\left( t \right)}}_{{{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}}}}{{\Delta U{{{\left( t \right)}}_{{{{{\text{M}}}_{{\text{1}}}}{{{\text{M}}}_{{\text{2}}}}}}} + ~\Delta U{{{\left( t \right)}}_{{{{{\text{M}}}_{{\text{2}}}}{{{\text{M}}}_{{\text{3}}}}}}}}}. \\ \end{gathered} $В полученной таким образом трансформанте P1(t), в поздней стадии становления в общем переходном процессе ослабляется сигнал, связанный с вихревым током.
Для понимания поведения измеряемых величин на 3-х электродной установке, расположенной в осевой области ГЭЛ, приведены примеры ПП для двух геоэлектрических моделей. Для одной из них сигнал ВП, главным образом, связан с гальваническим током, для другой с вихревым.
На основе расчетного переходного процесса между электродами M1–M2 и M2–M3 формировался сигнал ΔU(t), Δ2U(t) и трансформанта P1(t). В такой трансформации величина, дифференцированная в пространстве, будет давать значения отличные от нуля, а распределенная однородно будет иметь нулевые значения.
Изменение Р1(t) во время переходного процесса тесно связано с изменением плотности тока и ее пространственной неоднородности в земле. Плотность тока определяет переходный процесс ΔU(t) на измерительной линии, а пространственная неоднородность – определяет конечную разность переходного процесса Δ2U(t). Рисунок 1 демонстирует пример, как выглядят графики ΔU(t), Δ2U(t) и Р1(t) над неполяризующейся и поляризующейся землей при преобладании гальванического возбуждения поляризационных процессов. Для расчетов использовалась осевая установка с длиной источника (AB) – 500 м, длиной измерительных линий (M1M2 и M2M3) – по 500 м, разносом (r) – 1250 м и модель полупространства с УЭС 50 Ом ⋅ м, характерным для геоэлектрических условий суши. Учет эффекта ВП осуществлен введением частотно зависимого УЭС формулой Коула–Коула (4) [Pelton et al., 1978]:
(4)
$\rho \left( \omega \right) = \,\,~{{\rho }_{{0~}}}\left( {1 - ~\eta {\kern 1pt} ~\left( {1~ - ~\frac{1}{{1 + \,\,~{{{\left( {i\omega \tau } \right)}}^{c}}}}} \right)} \right),$Рис. 1.
Решение ЭМ прямой задачи в осевой области источника во время пропускания тока и переходного процесса: (а) – разность потенциалов (ΔU0) и вторая конечная разность потенциалов (Δ2U0), переходный процесс (ΔU(t)) и конечная разность переходного процесса (Δ2U(t)); (б) – трансформанта Р0 и Р1(t). Обозначения графиков: 1 и 3 – ΔU0 и ΔU(t); 2 и 4 – Δ2U0 и Δ2U(t); 5 и 6 – Р0 и Р1(t) над неполяризующейся (η = 0) и поляризующейся (η = 5%) землей, соответственно (см. работу [Легейдо, 1998]).

Объяснить поведение графиков можно следующим образом. Во время изменения тока источника в проводящей среде возникает вихревой ток. Для ГЭЛ в начале переходного процесса структура вихревого тока будет повторять структуру гальванического тока, установившуюся во время пропускания тока (ПТ). Процесс становления ЭМ поля связан с растеканием кольца основной плотности вихревых токов вниз и вширь и стремление к равномерному распределению в земле [Strack, 1992]. Поэтому пространственная неоднородность ЭМ поля, связанного с вихревым током, будет уменьшаться, а в поздней стадии становления, стремиться к нулю. Конечная разность переходного процесса Δ2U(t), обусловленная вихревым током, будет стремиться к нулю в поздней стадии становления. Это показано на рис. 1а, значения Δ2U(t) (график 2) резко уменьшаются после времени 0.01 с.
Пространственная неоднородность тока ВПГ (и ЭМ отклика, созданного им) сохраняется на протяжении всего переходного процесса и зависит от расстояния до источника, повторяя плотность гальванического тока. На рис. 1а (график 4) изменения Δ2U(t) приобретают другой характер после времени 0.01 с, когда пространственная неоднородность тока гальванически вызванной поляризации начинает преобладать над пространственной неоднородностью вихревого тока.
Из-за различий в растекании в земле вихревого тока и тока гальванически вызванной поляризации переходный процесс ΔU(t) и Δ2U(t) на 3-х электродной измерительной установке, расположенной в осевой области источника, над неполяризующейся и поляризующейся средой будет существенно различаться (рис. 1а).
Трансформанта Р1(t), полученная на основе расчетов в осевой области заземленной линии, в поздней стадии становления подавляет составляющую сигнала, связанную с диффузией вихревых токов. В поздней стадии плотность вихревых токов выравнивается в нижнем полупространстве и пространственная неоднородность ЭМ поля, создаваемая вихревым током, стремится к 0. Поэтому на этой стадии переходного процесса трансформанта P1(t) для рассмотренных геоэлектрических условий определяется полем гальванически вызванной поляризации (рис. 1б).
Индукционно вызванная поляризация в осевой области ГЭЛ проявляется в смене знака ΔU(t) [Легейдо, 1998], а для 3-х электродной измерительной установки в смене знака второй конечной разности сигнала переходного процесса Δ2U(t) и трансформанты Р1(t) [Агеенков и др., 2020]. Рисунок 2 показывает, как выглядят графики ΔU(t), Δ2U(t) и Р1(t) над неполяризующейся и поляризующейся землей с преобладанием индукционного возбуждения поляризационных процессов. Нужно отметить, что в этой публикации за положительный сигнал принят сигнал на измерителе, расположенном в осевой области источника, во время пропускания тока, и все изменения знака сигнала описываются относительно него. Для расчетов использовалась установка, описанная выше, и синтетическая модель, использовавшаяся в первом примере (см. рис. 1), усложненная введением высокоомного экрана с поляризуемостью свойственной только среде под экраном (табл. 1). Завышенное значение поляризуемости третьего слоя используется в эксперименте для увеличения эффекта ВП, связанного с ним. Модели, использовавшиеся в этих примерах, не характерны для условий акваторий, но ярко показывают визуальные различия в проявлении сигналов ВПГ и ВПИ в переходном процессе на заземленной линии и служат исключительно для этих разьяснений.
Рис. 2.
Решение ЭМ прямой задачи в осевой области источника во время пропускания тока и переходного процесса: (а) – разность потенциалов (ΔU0) и вторая конечная разность потенциалов (Δ2U0), переходный процесс (ΔU(t)) и конечная разность переходного процесса (Δ2U(t)); (б) – трансформанта Р0 и Р1(t). Обозначения графиков: 1 и 3 – ΔU0 и ΔU(t); 2 и 4 – Δ2U0 и Δ2U(t); 5 и 6 – Р0 и Р1(t) над неполяризующейся (η = 0) и поляризующейся в подэкранной толще (η = 50%) землей, соответственно (см. работу [Агеенков и др., 2020]).

Таблица 1.
Модель среды с преобладанием индукционного возбуждения поляризационных процессов
| Слой | Удельное электрическое сопротивление ρ, Ом ⋅ м |
Коэффициент поляризуемости η, % |
Постоянная времени τ, с |
Показатель степени c, б.р. |
Мощность слоя h, м |
|---|---|---|---|---|---|
| 1 | 50 | 0 | 300 | ||
| 2 | 1000 | 0 | 500 | ||
| 3 | 50 | 50 | 1 | 0.5 | ∞ |
Основная плотность гальванического тока, для используемой установки, будет сосредоточена выше высокоомного экрана. В середине источника на глубине от 1/4 до 1/10 длины AB [Матвеев, 1990], т.е. от 50 до 125 м. Вихревой ток, проникая под высокоомный экран, начинает распространяться под ним и поляризовать среду. По мере затухания вихревого тока, среда возвращается в первоначальное состояние, что сопровождается возникновением тока ВПИ. Этот ток следует “тенью” за вихревым током, но имеет противоположное направление. Пространственная дифференциация тока ВПИ повторяет, существовавшую до его возникновения, дифференциацию вихревого тока с задержкой во времени, определяющейся геоэлектрическими свойствами среды (УЭС, постоянной времени поляризационного процесса) (4).
На графике 4 (рис. 2а) видно, что ВПИ начинает проявляться со времени около 10 мс – значения Δ2U(t) начинают уменьшаться вплоть до смены знака сигнала на времени 30 мс, что вызывает и смену знака трансформанты. Смена знака ΔU(t) (рис. 2а, график 3) происходит позднее – на времени 500 мс, с этим связан разрыв графика Р1(t) и вторая смена знака трансформанты, ее значения вновь становятся положительными (рис. 2б, график 6). До времени примерно 1 с значения Δ2U(t) превышают значения ΔU(t), поэтому трансформанта больше 1 – эта часть графика и большие отрицательные значения не показаны на графике 6 (см. рис. 2б). Регистрацию сигнала ВПИ, имеющего противоположную полярность, относительно знака сигнала СП, отмечают при работе с индуктивными установками [Кожевников, 2012; Каменецкий и др. 2014; и др.].
Описанные теоретические сигналы показывают, как проявляются временные интервалы преобладания СП, ВПГ и ВПИ во время переходного процесса на 3-х электродной измерительной линии, расположенной в осевой области ГЭЛ.
In situ получены трансформанты со схожим изменением сигнала. Полевые измерения АДНМЭ были выполнены на акватории глубиной порядка 600 м. Использовалась установка с AB – 800 м, имеющей наклон внутри водного слоя – электрод A заглублен на 50 м, элетрод B на 200 м и с измерительной частью, погруженной в водный слой практически горизонтально на глубину 250–300 м, M1M2 = M2M3 – 400 м. Т.о. высота измерительной части над морским дном составляла 300–350 м. Измерения переходной характеристики выполнялись со 100 мс до 12 с Длина линии съемки составляла 25000 м.
На графиках натурных измерений на поздних временах трансформанты P1(t) отмечаются отрицательные значения на нескольких участках линии (рис. 3). Временной интервал отрицательных значений достаточно продолжительный с 3 до 12 с. Пространственная протяженность таких участков составляет 2000–5000 м (рис. 4), учитывая расстояние между точками пространственного осреднения записи [Ситников и др., 2017] принятой в 1000 м.
Рис. 3.
План графиков измеренного сигнала P1(t). Временная ось показана для первого графика, остальные кривые даны в аналогичном временном интервале.


Есть на этой линии и участки с ярко выраженными положительными значениями P1(t) на поздних временах. Протяженность этих участков 2000 и 3000 м.
Распределение отрицательных и положительных значений на линии съемки носит не случайный характер, поэтому, можно предположить, что они связаны с изменениями поляризационных свойств геологической среды и глубиной залегания поляризующегося объекта.
ОПИСАНИЕ ЧИСЛЕННОГО ЭКСПЕРИМЕНТА
В основе теоретической части исследования лежат результаты решения прямой задачи от одномерной проводящей поляризующейся среды для горизонтальной электрической компоненты неустановившегося ЭМ поля. Для расчетов сигнала на осевых установках использовался метод линейной фильтрации решения задачи ЭМ становления [Петров, 2000]. При расчетах первоначально вычислялась частотная характеристика сигнала в широком диапазоне частот, затем путем преобразования Фурье получалось решение во временной области. ВП среды учитывалась частотно зависимым УЭС (4). На экваториальных установках сигнал рассчитывался программой [Персова и др., 2009; Соловейчик и др., 2011], которая позволяет раздельно моделировать процессы становления ЭМ поля и вызванной поляризации, возбуждаемые электрической линией. ЭДС ВП описывалась формулой В.В. Кормильцева (5) [Кормильцев, 1980]:
(5)
$\beta \left( t \right) = ~\exp \left( {\frac{t}{{{{T}_{0}}\sqrt \pi }}} \right){\text{erfc}}\left( {\sqrt {\frac{t}{{{{T}_{0}}\sqrt \pi }}} } \right),$Для численного эксперимента была выбрана простая среда – двухслойное полупространство. Первый слой – морская вода сильно проводящая неполяризующаяся мощностью h1 от 50 до 250 м с УЭС 0.25 Ом ⋅ м. Основание – геологические образования проводящие поляризующиеся с УЭС 1.5 Ом ⋅ м и поляризуемостью η 0 или 15% (см. рис. 5), временем релаксации τ 0.5 с, показателем степени с 0.5 б.р. (табл. 2, табл. 3).
Рис. 5.
Схема осевых электрических установок: AB – источник; M1M2M3, M2M3M4, M3M4M5, M4M5M6, M5M6M7, M6M7M8, M7M8M9, M8M9M10 – трехэлектродные измерительные линии; r – разнос (расстояние между центром источника и центром трехэлектродной измерительной линии).

Таблица 3.
Модель проводящей среды с поляризующимся основанием
| Слой | Удельное электрическое сопротивление ρ, Ом ⋅ м |
Коэффициент поляризуемости η, % |
Постоянная времени τ, с |
Показатель степени c, б.р. |
Мощность слоя h, м |
|---|---|---|---|---|---|
| 1 | 0.25 | 0 | – | – | 50–250 и 600 |
| 2 | 1.5 | 15 | 1 | 0.5 | ∞ |
Для численного эксперимента использовалось несколько осевых установок с длиной источника AB, равной 50, 100, 250, 500, 1000 и 2000 м, рядом измерительных линий с длиной, равной длине источника, расположенных в осевой области на разносах, выраженным в единицах длины источника: (3/2)AB, 2AB, (5/2)AB, 3AB, (7/2)AB, 4AB, (9/2)AB, 5AB (рис. 5, табл. 4). Таким образом, рассматривались установки, для которых разнос зависит от длины источника. Установки размещались на поверхности водного слоя, в его середине и на поверхности основания (земли) (см. рис. 5).
Таблица 4.
Характеристики осевых установок численного эксперимента
| Длина источника AB, м | Разносы r, м | Длина измерителя M1–M2, M2–M3, м |
|---|---|---|
| 50 | 75, 100, 125, 150, 175, 200, 225, 250 | 25, 25 |
| 100 | 150, 200, 250, 300, 350, 400, 450, 500 | 50, 50 |
| 250 | 375, 500, 625, 750, 875, 1000, 1125, 1250 | 125, 125 |
| 500 | 750, 1000, 1250, 1500, 1750, 2000, 2250, 2500 | 250, 250 |
| 1000 | 1500, 2000, 2500, 3000, 3500, 4000, 4500, 5000 | 500, 500 |
| 2000 | 3000, 4000, 5000, 6000, 7000, 8000, 900, 10 000 | 1000, 1000 |
На осевых многоразносных установках на каждой трехэлектродной измерительной линии проводились расчеты переходного процесса ΔU(t), конечной разности сигнала переходного процесса Δ2U(t) и трансформанты Р1(t).
На экваториальных многоразносных установках (рис. 6, табл. 5) на каждой измерительной линии рассчитывался переходный процесс ΔU(t). Использовались экваториальные установки с длиной источника 50, 100, 250, 500, 1000 и 2000 м и приемников – измерительных линий MN, равных половине длины источника, расположенных на разносах: (2/10)AB, (3/10)AB, (4/10)AB, (5/10)AB, (6/10)AB, (7/10)AB, (8/10)AB, (9/10)AB, AB
Рис. 6.
Схема экваториальной электрической установки: AB – источник; MN –измерительные линии; r – разнос (расстояние между центром источника и центром измерительной линии).

Таблица 5.
Характеристики экваториальных установок численного эксперимента
| Длина источника AB, м | Разносы r, м | Длина измерителя MN, м |
|---|---|---|
| 50 | 10, 15, 20, 25, 30, 35, 40, 45, 50 | 25 |
| 100 | 20, 30, 40, 50, 60, 70, 80, 90, 100 | 50 |
| 250 | 50, 75, 100, 125, 150, 175, 200, 225, 250 | 125 |
| 500 | 100, 150, 200, 250, 300, 350, 400, 450, 500 | 250 |
| 1000 | 200, 300, 400, 500, 600, 700, 800, 900, 1000 | 500 |
| 2000 | 400, 600, 800, 1000, 1200, 1400, 1600, 1800, 2000 | 1000 |
Сигнал рассчитывался на времени от 1 мс до 16 с после бесконечного импульса тока (импульс возбуждения – функция Хевисайда).
РЕЗУЛЬТАТЫ ЧИСЛЕННОГО ЭКСПЕРИМЕНТА ДЛЯ ОСЕВЫХ УСТАНОВОК
Необходимо отметить, что оказалось удобно анализировать расчеты, используя не глубину погружения установки в водный слой, а высоту установки над дном акватории (поляризующимся основанием), поэтому дальнейшее изложение и выводы построены на основании такой терминологии.
В переходном процессе на осевых установках выделяется ранняя стадия переходного процесса (РСПП). Ее продолжительность зависит от разноса. Для осевой установки разнос зависит от длины источника, т.к. складывается из половины длин питающей и измерительной линий. Для установки с длиной источника 50 м на ближних разносах 75 и 100 м РСПП не отмечается в расчетном сигнале, начинающемся с 1 мс. Для такого удаления от источника эта стадия переходного процесса закончилась раньше начала расчетов сигнала. На разносах порядка 1000 м РСПП длится до 100 мс, разносе около 3000 – до 1 с, а на разносах порядка 10 000 м – до 7–8 с.
Результаты расчетов представлены в виде графиков P1(t) на всех разносах и всех высотах установки над дном акватории для поляризующегося и неполяризующегося основания. Графики для донных установок показаны сплошной линией, для установок, расположенных в середине водной толщи – широким пунктиром, для установок, расположенных на поверхности водного слоя – пунктирной линией (рис. 7 и рис. 8). Тонкими серыми линиями показаны графики для модели с неполяризующимся основанием.
Рис. 7.
Трансформанта P1(t) в зависимости от разноса и высоты установки над дном моря. Длина источника: 50 м. Длина разносов: 75, 100, 125, 150, 175, 200, 225, 250 м. Высота установки: 250, 125 и 0 м, при глубине акватории 250 м. Тонкими серыми линиями показан сигнал P1(t) для проводящей неполяризующейся среды. Индексы кривых: в области ранних времен – приведенная высота для установки, расположенной на поверхности воды; в области поздних времен - приведенная высота для установки, расположенной в середине водной толщи.
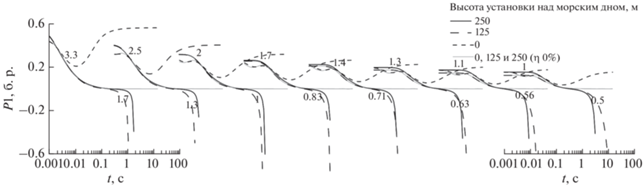
Рис. 8.
Трансформанта P1(t) в зависимости от разноса и высоты установки над дном моря. Длина источника: 250 м. Длина разносов: 375, 500, 625, 750, 875, 1000, 1125, 1250 м. Высота установки: 250, 125 и 0 м, при глубине акватории 250 м. Тонкими серыми линиями показан сигнал P1(t) для проводящей неполяризующейся среды. Индексы кривых: в области ранних времен – приведенная высота для установки, расположенной на поверхности воды; в области поздних времен – приведенная высота для установки, расположенной в середине водной толщи.

Нужно отметить основные тенденции проявления сигнала ВП в переходном процессе по визуальным признакам, одно из таких – увеличение или уменьшение, вплоть до смены знака, амплитуды трансформанты P1(t) на поздних временах в сравнении с трансформантой от неполяризующейся модели. Для установок, находящихся на дне, то есть на поверхности поляризующегося основания, сигнал ВП проявляется в виде сигнала ВПГ для всех разносов. Когда между поляризующимся основанием и установкой появляется неполяризующийся слой (при подъеме установки над дном), на разносах, расположенных ближе к источнику, ВП проявляется в виде сигнала ВПИ. Чем выше поднимается установка над дном, тем обширнее область ВП, связанная с вихревым током. При увеличении разноса интенсивность проявления сигнала ВП уменьшается, а при еще большем его увеличении сигнал ВП проявляется как сигнал ВПГ. Нужно напомнить, что в рассматриваемых установках длина источника определяет разносы установки, поэтому разнос подразумевается как величина, зависящая от длины источника. Таким образом, на основе выполненных расчетов видно, что от высоты установки над дном моря и от разноса зависит вид проявления сигнала ВП в сигнале переходного процесса – проявление его в виде сигнала ВПГ или ВПИ.
Сравнить поведение сигналов для установок разного размера для разной глубины акватории оказалось возможным на основе отношения высоты установки к разносу (приведенная высота установки) – Δhr = Δh/r (где Δh – это толщина водного слоя, отделяющего установку от геологических образований, а r – расстояние между центрами источника и трехэлектродной измерительной линии).
Графики (см. рис. 7 и рис. 8) обозначены значением приведенной высоты (Δhr). На более ранних временах показан индекс для установки, расположенной на поверхности воды, на более поздних временах – индекс (курсивом) для установки, расположенной в середине водной толщи. Для установок, находящихся на дне акватории, приведенная высота равна нулю – индекс не приводится. Эта величина возрастает при подъеме установки над дном и уменьшается при удалении измерителя от источника, то есть при увеличении разноса.
Для осевых установок удалось выделить области, в которых ВП проявляется в виде сигнала ВПГ или ВПИ и происходит переход от одного вида проявления сигнала ВП к другому. Характер проявления сигнала ВП в сигнале переходного процесса в осевой области источника определяется приведенной высотой установки. Возможно выделить интервалы приведенной высоты, для которых одинаково проявление сигнала ВП. Они описаны ниже.
Если приведенная высота установки имеет значения от 0 до 0.2 (небольшая высота или большие разносы), то сигнал ВП проявляется в виде сигнала ВПГ – положительные значения трансформанты P1(t) во время поздней стадии переходного процесса.
Если Δhr имеет значения больше 0.3 (большая высота или малые разносы), то сигнал ВП проявляется в виде сигнала ВПИ – отрицательные значения трансформанты P1(t) во время поздней стадии переходного процесса.
Если Δhr имеет значения от 0.2 до 0.3, то значения трансформанты P1(t) во время поздней стадии переходного процесса близки к нулю – можно предположить, что составляющие сигнала ВП, связанные с гальваническим и вихревым током, компенсируют друг друга. При таком положении измерителя изучение процессов ВП становится затруднительным.
Расчеты, выполненные для объяснения результатов полевого эксперимента, для модели с глубиной моря 600 м сохраняют выделенные тенденции характера проявления сигнала ВП.
РЕЗУЛЬТАТЫ ЧИСЛЕННОГО ЭКСПЕРИМЕНТА ДЛЯ ЭКВАТОРИАЛЬНЫХ УСТАНОВОК
Расчеты для экваториальных установок представлены в виде переходных процессов на измерителях на разных разносах от источника (рис. 9). Установки располагались на дне, в середине водной толщи и на поверхности водной толщи.
Рис. 9.
Абсолютные значения переходного процесса ΔU(t) для экваториальной установки с АВ = 250 м и измерителями MN = 125 м с разносом от 50 до 225 м в зависимости от и ее высоты над дном моря. Знаками “+” и “–” показаны сигналы разных знаков. Положительный знак соответствует знаку сигнала во время импульса для измерителя в осевой области источника.

Нужно отметить схожесть характера изменения сигналов на ранних временах для донной и погруженной установки. Для большинства разносов этих установок присутствует асимптота РСПП, по знаку соответствующая сигналу во время ПТ. С течением времени сигнал на донной и погруженной установках изменяет полярность – становится положительным. С увеличением разноса смена знака происходит позднее. После смены знака сигнала наблюдается спад установления поля.
Для поверхностной установки асимптота на ранних временах тоже присутствует, но имеет знак, противоположный знаку сигнала во время ПТ, т.е. сигнал асимптоты положительный. Для такой установки присутствует отрицательная асимптота на ранних временах только при длине источника 1000 и 2000 м на больших разносах (соответственно это разносы 900 и 1000 м и 1200, 1400, 1600, 1800 и 2000 м), Отрицательная асимптота так же заканчивается сменой знака сигнала (он становится положительным), после чего начинается спад.
На поздних временах для кривых в присутствии поляризующегося основания вновь наблюдается смена знака, так проявляется сигнал ВП. Вид сигнала ВП не зависит от высоты установки над дном, поэтому можно предположить, что сигнал вызванной поляризации, связанный с гальваническим и вихревым токов, для экваториальной установки проявляется одинаково. При подъеме установки увеличивается лишь время смены знака сигнала, чем дальше от поляризующегося основания, тем на более поздних временах происходит смена знака. Причем, чем меньше разнос, тем различие начала проявления ВП во времени становится больше. Так для установки с длиной источника 50 м минимальный разнос 25 м и для этих измерителей разница во времени смены знака самая большая, а для установки с длиной источника 2000 м минимальный разнос 1000 м и время смены знака одинаково для всех высот установки над дном.
Расчеты, выполненные для объяснения результатов полевого эксперимента, для модели с глубиной моря 600 м сохраняют описанные изменения сигнала, связанные как со сложным характером поведения вихревой составляющей, так и с проявлением сигнала ВП.
ИНТЕРПРЕТАЦИЯ РЕЗУЛЬТАТОВ ЧИСЛЕННОГО ЭКСПЕРИМЕНТА
На основании выполненных расчетов можно описать протекание переходного процесса для геоэлектрических условий акваторий вокруг ГЭЛ. Нестационарный ЭМ сигнал на измерительной линии создается целым рядом процессов. Работа источника заключается в подаче импульсов тока, разделенных между собой измерительной паузой, в связи с этим процессы, порождающие ЭМ сигнал на измерителе, начинаются во время включения тока и продолжаются во время токового импульса, выключения тока и после отключения источника (во время измерительной паузы). Для ГЭЛ образуется осевая и экваториальная области источника, различающиеся направлением тока во время импульса. Соответственно сигнал на измерителях, расположенных в этих областях, будет по-разному изменяться во время работы источника и измерительной паузы.
Известно, что при включении источника постоянного тока в окружающем пространстве мгновенно устанавливается потенциальное электрическое поле. В проводящей среде под воздействием установившегося эл. поля приходят в движение свободные и связанные электрические заряды, создающие гальванический ток. Связанные заряды могут смещаться на ограниченное расстояние, поэтому гальванический ток в начале импульса больше по амплитуде, а затем, по мере прекращения движения связанных зарядов, уменьшается. Вокруг токовых линий, в соответствии с законом индукции Фарадея, возникает вихревое магнитное поле, которое во время нарастания магнитного потока создает ЭДС индукции, препятствующее этому нарастанию. Под действием ЭДС индукции в среде возникает вихревой электрический ток, направленный против направления гальванического тока.
После прекращения движения связных зарядов в среде течет гальванический ток, определяющийся только свободными зарядами (ток проводимости). Знак сигнала на заземленной измерительной линии во время течения тока проводимости для осевой и экваториальной области будет иметь разные знаки. Для одномерных сред области разных знаков разделяют условные линии, проведенные под углом 45° к оси источника в местах заземлений A и B (рис. 10).
Рис. 10.
Знак сигнала на измерителях MN, расположенных параллельно оси источника, в осевой и экваториальной области источника AB, во время пропускания тока.

При отключении источника, во время РСПП (рис. 11), установившееся распределение плотности гальванического тока изменяется не сразу. В соответствии с законом индукции, в среде возникает высокочастотное переменное магнитное поле, препятствующее уменьшению магнитного потока стационарного магнитного поля. Переменное магнитное поле индуцирует вихревой ток, направленный в том же направлении, что и гальванический ток. Направление вихревого и гальванического тока будет совпадать везде, кроме области вблизи провода ГЭЛ, соединяющего источник и заземления от источника, что отражается в знаке сигнала (табл. 6). В этой области вихревой ток будет направлен так же, как ток в проводе во время импульса, замыкая кольцо вихревых токов. В этот момент релаксация связных зарядов, смещенных гальваническим током еще не начинается, она начнется по мере затухания появившихся вихревых токов, по мере завершения РСПП.
Рис. 11.
Переходный процесс на измерителях MN, расположенных параллельно оси источника, в осевой (а) и экваториальной (б) области источника AB.

Таблица 6.
Знак сигнала на измерительных линиях, расположенных в осевой и экваториальной области ГЭЛ
| Процесс, образующий сигнал на измерительной линии | Осевая область ГЭЛ | Экваториальная область ГЭЛ |
|---|---|---|
| ПТ | + | – |
| РСПП | + | – |
| СП | + | + |
| ВПГ | + | – |
| ВПИ | – | – |
Нужно отметить, что после отключения источника, сигнал на измерительных линиях определяется вихревым электрическим полем, т.к. потенциального поля уже нет, нет стока и истока электрических зарядов.
По мере затухания высокочастотного магнитного поля, вследствие тепловых потерь, в земле начинается два явления сопровождающихся ЭМ сигналом. Во-первых, вихревые токи начинают просачиваться в среде вширь и вглубь (диффузия вихревого тока), создавая становление ЭМ поля в проводящей среде. Область, где направление вихревого тока соответствовала направлению тока в проводе быстро распространится по всей экваториальной области и на измерителе сменится знак сигнала (см. табл. 6).
Во-вторых, начинается релаксация связанных зарядов различной природы, проявляющаяся, в частности, в виде тока ВПГ (тока деполяризации), создающего ЭМ сигнал (см. табл. 6). Сигнал ВПГ по знаку соответствует сигналу во время пропускания (см. рис. 1).
Во время становления вихревые токи действуют на связанные заряды в новых областях среды, а по мере затухания вихревых токов в этих областях происходит релаксация связанных зарядов. В противоположном направлении начинают течь вихревые токи ВПИ, создавая сигнал ВПИ (см. табл. 6). Можно предположить, что сигналы ВПГ и ВПИ образуются в несколько других областях, область образования сигнала ВПГ переходит в область образования сигнала ВПИ. Вторая область более обширная (вглубь и вширь так же, как и область просачивания вихревых токов больше области, где была основная плотность гальванического тока). Мы придерживаемся мнения, что изменение знака ПП на поздних временах для измерителей в осевой области источника связано с проявлением ВПИ и объясняем это следующее протекание физического процесса в условиях морских акваторий. Проводимость воды для рассматриваемой модели в 6 раз выше проводимости земли, в этом случае основная плотность гальванического тока сосредоточится в воде. После выключения источника в этой области будет индуцирована повышенная плотность вихревого тока, первоначально он будет удерживаться в соленоидальной ловушке, а со временем, в связи с тепловыми потерями, начнет просачиваться в землю и поляризовать эти толщи, по мере затухания вихревого тока начнет возникать индукционно вызванный ток противоположного направления и создавать на измерителе сигнал противоположного знака.
Существует и другая точка зрения на природу смены знака сигнала осевой установки на поздних временах, описанная в публикации [Агеев и др., 2006], ее авторы считают, что смена знака сигнала связана с зарядами, существующими на границе неполяризующейся и поляризующейся среды и имеющими гальваническую природу, т.е. образовавшимися во время пропускания тока (зарядки среды).
ЗАКЛЮЧЕНИЕ
Проведенное исследование позволяет сделать вывод – по нашему мнению на акватории сильно проводящая вода и проводящее поляризующееся основание (геологические породы) создают особую среду, которая позволяет в переходном процессе, созданном заземленной линией, проявляться сигналу ВПИ. Это происходит для измерений электрической установкой в осевой области источника при определенной высоте установки над геологическими образованиями. Если установка находится непосредственно на геологических породах, то сигнал ВП проявляется как сигнал ВПГ. Т.е. особые геоэлектрические условия на акватории в осевой области источника позволяют проявляться сигналу ВПИ визуально.
Ранее, при практических измерениях, проявление ВПИ рассматривалось как проявление помех. Но этот сигнал моделируемый и его можно рассматривать как информацию о ВП.
В экваториальной области проявление ВП носит общий характер и по виду сигналы ВПГ и ВПИ не различаются
Можно утверждать, что в переходном процессе, созданном электрической линией, главным образом, конкурируют сигналы СП, ВПГ и ВПИ, но только для условий, когда среда состоит из верхнего проводящего неполяризующегося слоя и поляризующегося основания, по нашему мнению, возможно выделить проявление сигнала ВПИ в измерениях переходного процесса. Такие условия характерны для акваторий.
Вид проявления ВП в сигнале переходного процесса (в виде сигнала ВПГ или ВПИ) для осевой установки определяется отношением высоты установки над дном приведенной к разносу (Δhr = = Δh/r).
В зависимости от Δhr, сигнал ВП в трансформанте P1(t) может проявляться в виде восходящей ветви на поздних временах, а может быть в виде нисходящей ветви, переходящей в отрицательные значения P1.
Если Δhr имеет значения от 0 до 0.2 (небольшая высота или большие разносы), то сигнал ВП проявляется в виде сигнала ВПГ – положительные значения трансформанты P1(t) во время поздней стадии переходного процесса.
Если Δhr имеет значения больше 0.3 (большая высота или малые разносы), то сигнал ВП проявляется в виде сигнала ВПИ – отрицательные значения трансформанты P1(t) во время поздней стадии переходного процесса.
Если Δhr имеет значения от 0.2 до 0.3, то значения трансформанты P1(t) во время поздней стадии переходного процесса близки к 0.
Значением высоты установки над землей, приведенной к разносу, можно прогнозировать вид проявления сигнала ВП в сигнале переходного процесса. Визуальное представление значений Δhr показано на рис. 12. Светлой областью выделены значения больше 0.3 – определяющие индукционный характер сигнала ВП. Областью белого цвета, ограниченной изолиниями 0.2 и 0.3, показаны приведенные высоты, на которых сигналы ВП индукционной и гальванической природы компенсируют друг друга. И, соответственно, темной областью показаны значения Δhr где в сигнале ВП преобладает гальваническая составляющая.

Однако некоторые исследователи [Агеев и др., 2006] смену знака ПП в осевой области источника связывают с релаксацией зарядов на границе сред (неполяризующейся и поляризующейся), имеющих гальваническую природу.
Еще один вывод, который можно сделать на основании проведенных расчетов, имеющий значение для практической реализации изучения ВП для осевых и экваториальных установок: при увеличении длины источника увеличивается продолжительность во времени РСПП, которая не зависит от высоты установки над дном, при этом сокращается продолжительность времени для изучения процесса ВП.
Расчеты, выполненные для объяснения результатов полевого эксперимента, для модели с глубиной моря 600 м сохраняют описанные изменения сигнала для осевой и экваториальной области источника, связанные как со сложным характером поведения вихревой составляющей, так и с проявлением сигнала ВП.
Список литературы
Агеев В.В., Каринский С.Д., Светов Б.С. Становление электромагнитного поля в поляризующейся среде и определение параметров Cole-Cole // Геофизика. 2006. № 5. С. 40–45.
Агеенков Е.В., Давыденко Ю.А., Фомицкий В.А. Влияние неосевого расположения приемной и питающей электрических линий на результаты дифференциально-нормированного метода электроразведки // Геология и геофизика. 2012. Т. 53 (1). С. 150–157.
Агеенков Е.В., Ситников А.А., Пестрев И.Ю., Попков А.В. О проявлении процессов индукционного становления и вызванной поляризации при работе с осевой и симметричной электрическими установками // Геология и геофизика. 2020. Т. 61. № 7. С. 976–991. https://doi.org/10.15372/GiG2019151
Агеенков Е.В., Ситников А.А., Воднева Е.Н. Проявление сигнала вызванной поляризации на многоразносных установках в условиях акваторий с глубиной моря до 100 м // Науки о Земле и недропользование. 2021. Т. 44. № 3. С. 301–311.
Агеенков Е.В., Ситников А.А., Воднева Е.Н. Результаты математического моделирования переходных процессов для условий акваторий морского шельфа // Геология и геофизика. 2022. Т. 63. № 7. С. 971—987.
Антонов Е.Ю., Шеин А.Н. Разделение эффекта становления и явления вызванной поляризации при зондировании поляризующихся сред методом переходных процессов. Сборник материалов международного научного конгресса “Гео-Сибирь-2007”. 25–27 апреля 2007 г. Новосибирск: СГГА. 2006. С. 231–218.
Антонов Е.Ю., Шеин А.Н. Способы повышения качества инверсии данных нестационарных электромагнитных зондирований // Геология и геофизика. 2008. № 10. С. 1046–1062.
Вишняков А.Э., Лисицын Е.Д., Яневич М.Ю. Влияние временных параметров вызванной поляризации залежей углеводородов на переходные процессы электромагнитного поля. Техника и методика геофизических исследований Мирового океана. Сборник научных трудов. ПГО “Севморгеология”. 1988. С. 124–132.
аменецкий Ф.М., Тригубович Г.М., Чернышев А.В. Три лекции о вызванной поляризации геологической среды. Мюнхен: Вела Ферлаг. 2014. 58 с
Кожевников Н.О., Антонов Е.Ю. Импульсная индуктивная электроразведка поляризующихся сред // Геофизический журнал. 2009. Т. 31. № 4. С. 104–118.
Кожевников Н.О. Быстропротекающая индукционно-вызванная поляризация в мерзлых породах // Геология и геофизика. 2012. Т. 53. № 4. С. 527–540.
Комаров В.А. Электроразведка методом вызванной поляризации. Л.: Недра. 1980. 391 с.
Кормильцев В.В. Переходные процессы при вызванной поляризации. М.: Недра. 1980. 130 с.
Левченко А.В. Взаимное влияние процессов индукции и вызванной поляризации при индуктивном и гальваническом возбуждении. Дис. … канд. техн. наук. Свердловск: УрО РАН институт геофизики. 1992. 17 с.
Легейдо П.Ю., Мандельбаум М.М., Рыхлинский Н.И. Дифференциально-нормированный метод электроразведки при прямых поисках залежей углеводородов // Геофизика. 1995. № 4. С. 42–45.
Легейдо П.Ю., Мандельбаум М.М., Рыхлинский Н.И. Информативность дифференциальных методов электроразведки при изучении поляризующихся сред // Геофизика. 1997. № 3. С. 49–56.
Легейдо П.Ю. Теория и технология дифференциально-нормированной геоэлектроразведки для изучения поляризующихся разрезов в нефтегазовой геофизике. Дисс. ... докт. геол.-мин. наук. Иркутск: ИрГТУ. 1998. 198 с.
Марков С.Ю., Горбачев С.В., Иванов С.А., Мятчин О.М., Нурмухамедов Т.В., Смилевец Н.П. и др. Повышение надежности прогноза углеводородов на шельфе Печорского моря по результатам переинтерпретации электроразведочных работ в комплексе с сейсморазведочными данными // Геофизика. 2021. № 3. С. 25–33.
Матвеев Б.К. Электроразведка. М.: Недра. 1990. 368 с.
Мезенцев А.Н. Математическое моделирование неустановившихся электромагнитных полей заземленных и незаземленных источников в поляризующихся средах. Дис. … докт. физ.-мат. наук. Свердловск: УрО АН СССР Институт геофизики. 1990. 38 с.
Могилатов В.С. Импульсная электроразведка. Новосибирск: НГУ. 2014. 300 с.
Могилатов В.С. Эффективная электроразведка в море: csem и другие методы // Геофизика. 2015. № 6. С. 38–42.
Моисеев В.С. Метод вызванной поляризации при поисках нефтеперспективных площадей. Новосибирск: Наука. 2002. 136 с.
Небрат А.Г. Интерпретация данных ЗСБ в морских условиях. Дис. … канд. геол.-мин. наук. 04.00.12. Москва. 1990. 198 с. 15 с.
Персова М.Г., Соловейчик Ю.Г., Абрамов М.В. Конечноэлементное моделирование геоэлектромагнитных полей, возбуждаемых горизонтальной электрической линией //Сибирский журн. индустриальной математики. 2009. № 4(40). С. 106–119.
Петров А.А. Возможности метода становления электрического поля при поисках углеводородов в шельфовых зонах // Геофизика. 2000. № 5. С. 21–26.
Ситников А.А., Иванов С.А., Жуган П.П., Мальцев С.Х., Агеенков Е.В. Аппаратура, устройства и системы наблюдений для решения нефтегазопоисковых и инженерно-геологических задач на акваториях электроразведочными методами ДНМЭ и НДЭМЗ // Приборы и системы разведочной геофизики. 2017. № 2. С. 34–41.
Соловейчик Ю.Г., Персова М.Г., Абрамов М.В., Токарева М.Г. Конечноэлементное моделирование электрического и магнитного полей вызванной поляризации в трехмерной среде // Сибирский журн. индустриальной математики. 2011. Т. 14. № 3. С. 112–124.
Табаровский Л.А. Применение метода интегральных уравнений в задачах геоэлектрики. Новосибирск: Наука. 1975. 143 с.
Уэйт Дж.Р. Геоэлектромагнетизм. М.: Недра. 1987. 235 с.
Pelton W.H., Ward S.H., Hallof P.G., Sill W.R., Nelson P.H. Mineral discrimination and removal of inductive coupling with multifre-quency IP // Geophysics. 1978. V. 43. P. 588–609.
Strack K.-M. Exploration with deep transient electromagnetics. Elsevier science publishing Co. 1992. 373 p.
Strack K.-M., Vozoff K. Integreiting long offset transient electromagnetic (LOTEM) with seismics in an exploration environment // Geophysical prospecting. 1999. V. 44(6). P. 997–1017.
West G.F., Macnae J.C. Electromagnetic physics of the electromagnetic induction exploration method // Electromagnetic Methods in Applied Geophysics–Applications. SEG Investigations in Geophysics. 2008. V. 2. P. 5–46.
Дополнительные материалы отсутствуют.