

Проблемы машиностроения и надежности машин, 2022, № 3, стр. 83-94
Ассистирующие роботохирургические комплексы для малоинвазивных операций
Е. И. Велиев 1, Р. Ф. Ганиев 2, В. А. Глазунов 2, Г. С. Филиппов 2, *, С. А. Скворцов 2
1 Российская медицинская академия непрерывного профессионального образования
Москва, Россия
2 Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
* E-mail: filippov.gleb@gmail.com
Поступила в редакцию 20.10.2021
После доработки 11.02.2022
Принята к публикации 21.02.2022
- EDN: RVOKBP
- DOI: 10.31857/S0235711922030129
Аннотация
В статье рассматривается современное состояние роботизированных ассистирующих комплексов в малоинвазивной хирургии. Предложены три различных манипулятора для роботизированной хирургии, отличающихся от известных зарубежных аналогов рядом преимуществ, а также задающее устройство. Приведены прототипы роботов, решение обратной задачи о положениях, а также задачи динамики. В качестве приводов предлагается использовать электродвигатели постоянного тока.
Исследования в области медицинской робототехники идут нарастающим темпом [1]. Имеют место различные направления использования роботизированных систем в медицине: малоинвазивная полостная хирургия (урология, проктология, гинекология, кардиохирургия, эндокринология и др.) [2], хирургические лазеры [3], хирургия в области позвоночника [4]. В большинстве случаев использование ассистирующих роботохирургических комплексов для малоинвазивных операций позволяет значительно снизить кровопотери и реабилитационный период, увидеть недоступные для зрения зоны, убрать тремор рук хирурга и ошибочные движения скальпелем или другим инструментом [5].
Первые робототехнические системы в медицине появились в 1970-е годы для различных целей, прежде всего в качестве вспомогательных устройств и поддерживающих манипуляторов [6]. Концепция телероботики для хирургии появилась в начале 1970-х годов по инициативе Национального управления по аэронавтике и исследованию космического пространства (NASA) [7].
Первоначальной задачей проекта было обеспечение возможности оказания медицинской помощи астронавтам во время космического полета. Предполагалось использовать хирургические роботы, дистанционно управляемые с Земли [8].
Однако данный проект не получил соответствующего финансирования и развития. Примерно через 15 лет начали появляться первые прототипы хирургических роботов, при разработке которых стала очевидна сложность задачи управления телехирургическими роботами в космосе из-за эффекта задержки во времени передачи управляющих команд с Земли, вызванного большими расстояниями [9].
В этой связи фокус развития роботизированной хирургии сместился на создание хирургических роботов для проведения операций в земных условиях, что привело к появлению первых коммерчески ориентированных хирургических роботов на рынке к концу 1980-х гг.
Активное развитие робототехники для применения в области хирургии начиналось с 90-х гг. прошлого века. Так, в 1996 году была успешно проведена телехирургическая лапароскопическая операция по удалению желчного пузыря (холецистэктомия) у свиньи с использованием роботизированного комплекса ARTEMIS (Advanced Robotics and TElemanipulator System for Minimally Invasive Surgery). Особенностью комплекса ARTEMIS является открытая консоль и три руки-манипулятора [6].
Примечателен проект ZEUS (Computer Motion Inc. (США). В конце 90-х гг. с помощью этой системы была проведена трансатлантическая лапароскопическая холецистэктомия, а также несколько урологических операций на человеке.
Самой распространенной роботизированной хирургической системой в мире на сегодняшний день является платформа DaVinci Intuitive Surgical System, которая применяется в урологии, проктологии, гинекологии, кардиохирургии, эндокринологии и других медицинских специализациях [7–9]. Различные модификации платформы DaVinci Intuitive Surgical System начали широко применять в практической хирургии на людях с начала 2000-х в разных странах. Следует отметить, что руки-манипуляторы этого робота, расположенные на общем основании, имеют последовательную структуру.
Бурное развитие технологий, в том числе в области компьютеризированной телемедицины, высокая надежность и эффективность ассистирующих систем привели к росту доверия к ним со стороны профессионального сообщества медиков и значительному росту рынка роботизированной хирургии. За последнее десятилетие возникло множество проектов новых роботизированных ассистирующих систем. Среди них стоит отметить Telelap ALF-X (Италия) [10], Medtronic (немецкий аэрокосмический центр, Германия) [11, 12], Avatera (Германия, Швейцария), REVO-I (Южная Корея) [13, 14], Medicaroid (Япония) [15], SurgiBot [16] и др. При этом, несмотря на имеющиеся существенные различия и особенности перечисленных систем, схемы механизмов большинства манипуляторов имеют подобную DaVinci последовательную структуру и внешне сильно похожи (рис. 1).

Например, медицинская компания Sofar (Милан, Италия) разработала роботизированную систему Telelap ALF-X, включающую в себя пульт дистанционного управления и три руки-манипулятора последовательной структуры, установленные на трех отдельных основаниях. Два манипулятора, похожие на лапароскопы, управляют инструментами с четырьмя и шестью степенями свободы [17, 18].
Система Medtronic разработана компанией MiroSurge (немецкий аэрокосмический центр, Оберпфаффенхофен, Германия) [19]. Конструкция первого прототипа Medtronic представляла собой механизмы последовательной структуры из трех легких манипуляторов, установленных на операционном столе, и открытой консоли с хирургом, сидящим перед автофокусирующим монитором. Роботизированные руки-манипуляторы состоят из семи последовательно расположенных кинематических пар. Предусмотрена возможность обеспечения тактильной обратной связи с помощью потенциометров.
В 2010-х компания Avateramedical (Йена, Германия) совместно с Force Dimension (Ньон, Швейцария) приступила к созданию роботизированного хирургического робота Avatera. Он оснащен закрытой консолью со встроенным сиденьем с использованием соответствующей технологии получения 3D-изображения с высоким разрешением. На общем основании расположены четыре манипулятора последовательной структуры, каждый из которых может обеспечивать выходному звену шесть степеней свободы.
Достаточно перспективная робототехническая система The Spider System (TransEnterix) представляет собой платформу, разработанную для лапароэндоскопической одномоментной хирургии (LESS), основанную на использовании трубок, в которых можно манипулировать гибкими инструментами [20]. Ранее обращение с инструментами было затруднено, особенно при работе с эндоскопическими швами. TransEnterix значительно улучшил систему, предоставив роботизированную руку SurgiBot.
В работе [21] проводился кинематический анализ робота daVinci и было установлено, что применение последовательной схемы повлекло добавление двух дополнительных кинематических цепей с приводами. Таким образом было показано, что последовательная схема механизмов, лежащая в основе конструкции большинства рук-манипуляторов хирургических роботов, приводит к схожим недостаткам: увеличению общей длины манипулятора и веса компонентов одной “руки” ~80 кг (при весе самого инструмента, размещенного на ее конце, ~20 г), что приводит к снижению позиционной точности [22]. При этом применение механизмов параллельной или параллельно-последовательной структуры может значительно повысить функциональные возможности.
Различные варианты устройств управления у предлагаемых на рынке и разрабатываемых роботизированных систем имеют конструкции, отличные от стандартных лапароскопических инструментов. Это приводит к необходимости специального процесса обучения персонала, может вызвать сложности переучивания при использовании различных роботизированных комплексов и классического подхода к проведению малоинвазивных хирургических операций.
Предложенные ранее авторами настоящей статьи механизмы имеют параллельно-последовательную структуру и не требуют избыточных приводов, а разрабатываемая система управления приближена к стандартному лапароскопическому инструменту [21–23].
Один их механизмов, разрабатываемый авторами, имеет массу ~10 кг за счет использования немассивных звеньев (рис. 2). Достаточно большая рабочая область, постоянство точки ввода, четыре степени свободы, повышение технической и эксплуатационной эффективности устройства манипулирования достигается за счет использования паралелльно-последовательной структуры.

Другой вариант механизма, предложенный в настоящей статье, имеет основание, на котором располагаются два дугообразных звена (рис. 3). В изменяемой точке соприкосновения этих звеньев расположена подвижная платформа, на которой последовательно размещены поступательный и вращательный приводы, перемещающие выходное звено по вылету и вращающие его вокруг своей оси.

Имеет место еще один вариант механизма, включающего в себя три параллельно соединенные кинематические цепи. Эти кинематические цепи содержат приводные каретки, расположенные на круглом основании-направляющей, причем оси всех вращательных пар пересекаются в одной точке (эта точка является точкой ввода инструмента). Также имеется подвижная платформа с установленным на ней электродвигателем, обеспечивающим поступательное перемещение центральной штанги, ось которой проходит через неподвижную точку ввода инструмента.

Во всех перечисленных механизмах отличительными особенностями является то, что для обеспечения требуемого размера рабочей зоны, числа степеней свободы, обеспечения постоянства точки ввода инструмента не используются дополнительные приводы. При этом часть приводов можно расположить на основании, таким образом, чтобы остальная часть механизма стала менее массивной. Это обеспечивает снижение массы всего механизма, облегчает его управление, уменьшает габариты.
Важной особенностью механизмов параллельной и параллельно-последовательной структуры являются возможные особые положения, которые могут привести к потере управляемости, а также к потере одной или нескольких степеней свободы в определенных точках расположения узлов механизма. Ранее рассмотрены задачи анализа механизмов с круговой направляющей [21, 22, 24].
Рассмотрим возможное применение электродвигателя постоянного тока для механизмов подобного рода. В данном случае появляется возможность расположить двигатели ближе к основанию, чем в других манипуляционных устройствах. При этом можно предусмотреть значительный запас по мощности двигателей.
Двигатели, установленные на основании, не требуют весьма строгих ограничений по массогабаритным показателям. Будем считать динамическое взаимовлияние между приводами незначительным. При этом можно регулировать уровень ошибки – разницы между реальными и требуемыми значениями координат, скоростей и ускорений для достижения необходимой динамической точности движения инструмента.
При рассмотрении применяемости указанных двигателей допустим, что отсутствуют трение, люфты и ограничения по току.
Запишем уравнение электрической цепи
где $u$ – напряжение; $i$ – сила тока; ${{R}_{{\text{я}}}}$ – активное сопротивление якоря двигателя; ${{L}_{{\text{я}}}}$ – индуктивность; ${{c}_{e}}$ – коэффициент, определяющий противоэлектродвижущую силу (противо-ЭДС); $\omega $ – угловая скорость вращения вала двигателя; ${{c}_{e}}\omega $ – противо-ЭДС.Исходя из этого, а также учитывая взаимосвязь между моментом и силой тока, можно записать
где ${{K}_{m}}$ – постоянный коэффициент, связывающий момент и силу тока; ${{J}_{r}}$ – момент инерции ротора (в нашем случае с учетом соответствующих перемещаемых звеньев).Вал двигателя связан с редуктором с передаточным отношением ${{i}_{{{\text{red}}}}}$. Таким образом, угол на выходе механизма равен $\psi = \varphi \cdot {{i}_{{{\text{red}}}}}$.
Приведем схему системы управления, соответствующую написанным выше уравнениям.
На рис. 5 ${{K}_{\psi }}$ – коэффициент обратной связи по положению; ${{i}_{{{\text{red}}}}}$ – передаточное отношение редуктора; ${{K}_{\omega }}$ – коэффициент обратной связи по скорости; ${{K}_{{{\text{us}}}}}$ – коэффициент усиления.

На входе усилителя имеем разность между задаваемым и реальным положениями, а также задаваемой и реальной скоростями.
Согласно теории автоматического регулирования передаточная функция системы без обратной связи по положению равна
Для определения устойчивости системы используем критерий Найквиста. Согласно этому критерию, годограф вектора амплитудно-фазовой частотной характеристики (АФЧХ) разомкнутой системы не должен охватывать точку (–1, 0), в противном случае система неустойчива.
Передаточная функция разомкнутой системы имеет вид
Для построения АФЧХ необходимо оператор p заменить на $j\omega $, где $j$ – мнимая единица.
Мнимая часть равна нулю при значении угловой скорости ${{\omega }_{\pi }}$ = = $\sqrt {\frac{{\left( {{{C}_{e}}{{i}_{{{\text{red}}}}} + {{K}_{{{\text{us}}}}}{{K}_{\omega }}} \right){{K}_{m}}}}{{{{J}_{r}}{{L}_{{{\text{in}}}}}{{i}_{{{\text{red}}}}}}}} $.
Это значение надо подставить в выражение для действительной части. Результат должен быть больше –1. Рассмотрим конкретные примеры функционирования системы управления.
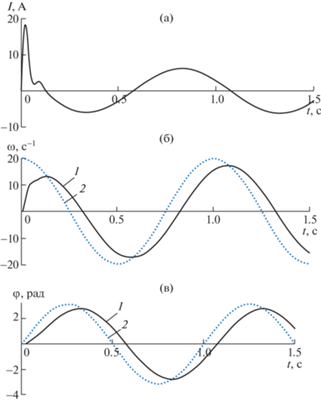
Для массогабаритных параметров механизма с постоянной точкой ввода инструмента (рис. 2) рассматривались несколько двигателей. Приведем параметры одного из них, обеспечивающих требуемые законы управления: номинальная угловая скорость вращения вала двигателя $\omega = 314.2$ рад/с; номинальная сила тока ${{i}_{{\text{н}}}} = 5.5$; номинальный момент, создаваемый двигателем, Mн = 0.2160 Н м; активное сопротивление якоря двигателя ${{R}_{r}} = 0.869$ Ом; момент инерции ротора с учетом соответствующих перемещаемых звеньев ${{J}_{r}} = 0.1142$ кг м2; постоянный коэффициент, связывающий момент и ток ${{K}_{m}} = 0.039$; номинальное напряжение ${{u}_{{\text{н}}}} = 127$ В; коэффициент, определяющий противо-ЭДС ${{c}_{e}} = 0.404$; коэффициент усиления ${{K}_{{{\text{us}}}}} = 50$; передаточное отношение редуктора ${{i}_{{{\text{red}}}}} = 20$; расчетное время 1 с. Требуемый закон движения (это тестовый закон, соответствующий максимальной угловой скорости движения руки человека) ${{\psi }_{d}} = \pi \sin \left( {2\pi t} \right)$; дополнительный коэффициент обратной связи по положению ${{K}_{\psi }} = 5$; коэффициент обратной связи по скорости ${{K}_{\omega }} = 0.1$.
Начальные условия по току, скорости и положения равны нулю. В этом случае имеем графики силы тока, скорости и угла поворота (рис. 6). При этом требуемый закон по скорости и току показан пунктиром.
Рис. 6.
Графики изменения тока, скорости и положения: (а) – изменение силы тока со временем; (б) – изменение скорости со временем, где 1 – реальное движение, 2 – желаемое; (в) – изменение положения со временем, где 1 – реальное движение, 2 – требуемое.

Из графиков видно, что ток достигает значения в 40 А. Для уменьшения максимального тока примем ${{K}_{{{\text{us}}}}} = 20$. Требуемый закон движения аналогичен предыдущему случаю. В результате численного эксперимента получаем график изменения тока, скорости и угла (рис. 7).
Рис. 7.
Графики изменения тока, скорости и угла при уменьшении коэффициента усиления: (а) – изменение силы тока со временем; (б) – изменение скорости со временем, где 1 – реальное движение, 2 – желаемое; (в) – изменение положения со временем, где 1 – реальное движение, 2 – требуемое.
Можно видеть, что максимальный ток уменьшил свое значение.
Рассматриваемый двигатель с достаточной динамической точностью обрабатывает тестовые движения.
Для оценки устойчивости системы подадим на вход ступенчатое напряжение, соответствующее повороту на 180°.
Из графиков тока, скорости и угла видно, что ток имеет довольно большое максимальное значение, процесс проходит примерно за 0.6 с (рис. 8).
Рис. 8.
График тока, скорости и угла при ступенчатой подаче напряжения: (а) – изменение силы тока со временем; (б) – изменение скорости со временем; (в) – изменение положения со временем.

Исходя из передаточной функции системы управления найдем угловую частоту, при которой мнимая часть равна нулю и годограф вектора АФЧХ разомкнутой системы поворачивается на 180°. Значение угловой частоты ${{\omega }_{\pi }} = 2.834$ рад/с. При этом значение действительной части равно –0.698, следовательно, система устойчива.
Приведем краткое описание задающего устройства для разрабатываемых в ИМАШ РАН манипуляторов для роботизированной хирургии (рис. 9).
Рис. 9.
Задающее устройство манипуляторов для роботизированной хирургии: (а) – общий вид задающего устройства; (б) – основной узел задающего устройства.
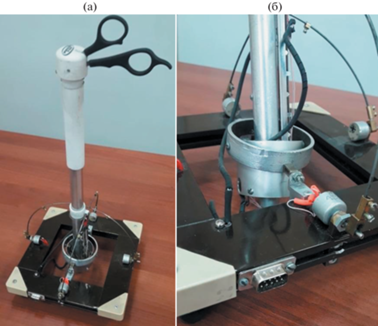
Задающее устройство включает в себя рукоятку управления, датчики поворотов и линейных перемещений, дугообразные звенья, карданный шарнир. Задающее устройство (рис. 9) обеспечивает управление по четырем степеням свободы, кроме того, предусмотрено управление схватом. Предлагаемая конструкция устройства позволяет обеспечить движения выходного звена и инструмента, расположенного на нем максимально похожими на движения стандартного хирургического лапароскопа. Задающее устройство вместе с роботизированным механизмом можно адаптировать для манипулирования камерой, расположенной в качестве выходного звена.
Приведенный в настоящей статье расчет является первым шагом в построении системы управления. В дальнейших работах авторы ставят перед собой задачи учета нелинейностей в модели двигателя постоянного тока, в частности, трение в кинематических парах, а также учета других подходов к построению системы управления, в частности, концепцию подчиненного регулирования.
Таким образом, разработанные механизмы и изготовленные прототипы обладают важными для малоинвазивных хирургических систем достоинствами по сравнению с уже признанными в мире, невысокими массогабаритными характеристиками при сохранении нагрузочной способности конструкции и динамической точности движений. При этом разработаны подходы к решению проблем, возникающих при использовании предлагаемых устройств, в частности речь идет о проведении кинематического и динамического анализа, об учете особых положений. Проведенные и дальнейшие исследования можно практически использовать при развитии отечественной роботизированной малоинвазивной хирургии.
Список литературы
Minimally invasive surgery market–Global industry analysis, size, share, growth, trends & forecast, 2013–2019 // Transparency Market Research. Albany. N.Y. USA. Tech. Rep. 2014.
Heikkinen T., Msika S., Desvignes G., Schwandner O., Schiedeck T.H., Shekarriz H., Bloechle C.H., Baca I., Weiss O., Morino M., Giraudo G., Bonjer H.J. Laparoscopic surgery versus open surgery for colon cancer: Short-term outcomes of a randomised trial // Lancet Oncol. 2005. V. 6. № 7. P. 477.
Велиев Е.И., Голубцова Е.Н., Томилов А.А. Возможности малоинвазивной коррекции недержания мочи после радикального лечения рака предстательной железы // Онкоурология. 2013. № 4. С. 37.
Rosen J., Hannaford B., Satava R.M. Surgical Robotics. Systems Applications and Visions Springer // Science+Business Media. LLC, 2011. 843 p.
Ficarra V., Novara G., Fracalanza S. A prospective, non-randomized trial comparing robot-assisted laparoscopic and retropubic radical prostatectomy in one European institution // BJU Int. 2009. V. 104 (4). P. 534.
Corker K., Lyman J.H., Sheredos S. A preliminary evaluation of remote medical manipulators // Bull Prosthet Res. 1979. V. 2. Iss. 16. P. 107.
Alexander A.D. Impacts of Telemation on Modern Society // On Theory and Practice of Robots and Manipulators. Berlin, Heidelberg: Springer, 1972. P. 121.
Alexander A.D. Impacts of telemation on modern society, Jan. 1973.
Takacs A., Nagy D.A., Rudas I.J., Haidegger T. Origins of Surgical Robotics: From Space to the Operating Room // Acta Polytechnica Hungarica. 2016. V. 13. № 1. P. 13.
Kwoh Y.S., Hou J., Jonckheere E.A., Hayati S. A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery // IEEE Transactions on Biomedical Engineering. 1988. V. 35 (2). P. 153.
Sooriakumaran P., Srivastava A., Shariat S.F. A Multinational, Multiinstitutional Study Comparing Positive Surgical Margin Rates Among 22393 Open, Laparoscopic, and Robot-assisted Radical Prostatectomy Patients // Eur. Uro. 2014. V. 66 (3). P. 450.
Lee D. Perioperative outcomes of robot-assisted radical prostatectomy compared with open radical prostatectomy: results from the nationwide inpatient sample // Journal of Endourology. 2012. 26 (8). P. 951.
Rassweiler J.J., Autorino R., Klein J., Mottrie A., Goezen A.S., Stolzenburg J.-U., Rha K.H., Schurr M., Kaouk J., Patel V., Dasgupta P., Liatsikos E. Future of robotic surgery in urology // Robotics and Laparoscopy BJU Int. 2017. V. 120. P. 822.
Gidaro S., Buscarini M., Ruzi E. et al. Telelap Alf-X: a novel telesurgical system for the 21st century // Surg. Technol. Int. 2012. V. 22. P. 20–5.
Hagn U., Konietschke R., Tobergte A. et al. DLR MiroSurge: a versatile system for research in endoscopic telesurgery // Int. J. Comput. Assist. Radiol. Surg. 2010. V. 5. P. 183–9.
Thielmann S., Seibold U., Haslinger R. et al. MICA – a new generation of versatile instruments in robotic surgery // Proc. Int. Conference Intelligent Robots and Systems. Taipeh. 2010.
Rossitto C., Gueli Alletti S., Romano F., Fiore A., Coretti S., Oradei M., Ruggeri M., Cicchetti A., Marchetti M., Fanfani F., Scambia G. Use of robot-specific resources and operating room times: the case of Telelap Alf-X robotic hysterectomy // Int. J. Med. Robot. 2016. V. 12: 613–9.
Fanfani F., Restaino S., Rossitto C. et al. Total laparoscopic (S-LPS) versus TELELAP ALF-X robotic-assisted hysterectomy: a case control study // J. Minim. Invasive Gynecol. 2016. V. 23: 933–8.
Hagn U., Konietschke R., Tobergte A. et al. DLR MiroSurge: a versatile system for research in endoscopic telesurgery // Int. J. Comput. Assist. Radiol. Surg. 2010. V. 5: 183–9.
Haber G.P., Autorino R., Laydner Y. et al. Spider surgical system for urologic procedures with laparoendoscopic single-site surgery from initial laboratory experience to first clinical application // Eur. Urol. 2012. V. 61: 415–22.
Veliev E.I., Ganiev R.F., Glazunov V.A., Filippov G.S. Parallel and Sequential Structures of Manipulators in Robotic Surgery // Doklady Physics. 2019. T. 64. № 3. P. 106.
Veliev E.I., Ganiev R.F., Glazunov V.A., Filippov G.S. Promising Minimally Invasive Robotic Surgical Complexes with Parallel Structure // Doklady Physics. 2020. V. 65. № 11. P. 409.
Ganiev R.F., Ganiev S.R., Kasilov V.P., Pustovgar A.P. Wave technology in mechanical engineering // Co-published by JohnWiley & Sons Inc. Hoboken, New Jersey, and Scrivener Publishing LLC Salem Massachusetts. USA. Published simultaneously in Canada, 2015.
Глазунов В.А. Механизмы параллельной структуры и их применение: робототехнические, технологические, медицинские, обучающие системы. Ижевск: Ижевский институт компьютерных исследований, 2018. 1036 с.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин