

Приборы и техника эксперимента, 2023, № 1, стр. 23-32
СООТНОШЕНИЕ СИГНАЛ/ШУМ МОДУЛЯ КРЕМНИЕВОЙ ТРЕКОВОЙ СИСТЕМЫ ЭКСПЕРИМЕНТА BM@N
Д. В. Дементьев a, *, М. О. Шитенков a, В. В. Леонтьев a, b, Н. В. Сухов a, А. Д. Шереметьев a, Ю. А. Мурин a
a Объединенный институт ядерных исследований, Лаборатория физики высоких энергий
им. В.И. Векслера и А.М. Балдина
141980 Дубна, Московской обл. ул. Жолио-Кюри, 6, Россия
b НИИ ядерной физики им. Д.В. Скобельцына Московского государственного университета им. М.В. Ломоносова
119991 Москва, ГСП-1, Ленинские горы, 1, стр. 2, Россия
* E-mail: dementiev@jinr.ru
Поступила в редакцию 11.06.2022
После доработки 22.06.2022
Принята к публикации 22.08.2022
- EDN: JSRETI
- DOI: 10.31857/S0032816223010111
Аннотация
Модуль с двусторонним микростриповым кремниевым сенсором является базовым элементом кремниевой трековой системы (КТС) эксперимента BM@N. Основным параметром для трековой системы физического эксперимента в области физики высоких энергий является соотношение сигнал/шум, которое определяется комплексным влиянием параметров детектора и считывающей электроники. В статье представлена аналитическая модель различных источников шума, а также рассматриваются параметры, определяющие эффективность сбора заряда с детектора. Приведены результаты измерений шума для различных конфигураций модуля, различающихся размером сенсора и длиной сигнального кабеля, соединяющего стрипы сенсора с входными цепями считывающей электроники. Приводятся результаты измерений сигнала от β-источника 106Ru. Показано, что соотношение сигнал/шум для модулей КТС составляет не ниже 18.
ВВЕДЕНИЕ
В настоящий момент ведется модернизация детекторных систем эксперимента “Барионная материя на Нуклотроне” (BM@N), предназначенного для изучения свойств ядерной материи с плотностью до 4ρ0 в столкновениях тяжелых ионов на выведенном пучке Нуклотрона [1]. Модернизированная установка BM@N представляет собой эксперимент на фиксированной мишени, центральной частью установки будет широкоапертурная гибридная трековая система, расположенная внутри спектрометрического магнита СП-41. Трековая система будет включать в себя две подсистемы: семь плоскостей детекторов на основе газовых электронных умножителей (ГЭУ) [2] и расположенные перед ними четыре станции кремниевой трековой системы (КТС) [3]. КТС при этом является одной из самых сложных систем установки и включает в себя более чем 600 тыс. каналов, обеспечивающих треки вторичных частиц с пространственным разрешением до 25 мкм.
Базовым элементом КТС является модуль с двусторонним микростриповым кремниевым сенсором. Конструкция модуля разработана в рамках сотрудничества с проектом CBM@FAIR [4] и состоит из уникальных компонентов. Главной особенностью конструкции модуля является использование сверхлегких алюминиевых кабелей на полиамидной основе для соединения сенсора со считывающей электроникой. Это позволяет расположить считывающую электронику детектора на периферии станций, минимизировав тем самым количество вещества в области детектора с наибольшей плотностью треков. Четыре станции КТС будут состоять из 292-х модулей различных типов. В зависимости от положения в станции каждый модуль состоит из сенсора определенного типоразмера, набора кабелей заданной длины и двух плат со считывающей электроникой для чтения сигналов с обеих сторон сенсора. Внешний вид модуля КТС показан на рис. 1. Конструкция и разработанная методика сборки модуля подробно описаны в [5].

Сенсоры КТС эксперимента BM@N имеют специально разработанную топологию и были изготовлены двумя производителями: HPC (Япония) и CiS (Германия). Для модулей, расположенных по краям станций, используются сенсоры размером 62 × 62 мм, центральные модули имеют сенсоры размером 42 × 62 мм. При изготовлении прототипов модулей для отладки технологии сборки также применялись сенсоры размером 22 × 62 мм. Независимо от размера, сенсор имеет 1024 стрипа на обеих сторонах, ширина стрипа составляет 58 мкм. При этом на N-стороне сенсора стрипы прямые и сонаправлены магнитному полю. Стрипы на P-стороне направлены под углом 7.5° по отношению к стрипам на N-стороне. Таким образом, поверхность каждого сенсора представляет собой сеть “пикселей” размером Δx = = 58 мкм и Δy = 58 мкм/tg(7.5°) = 440.6 мкм. Для соединения коротких стрипов, находящихся в противоположных углах сенсора, используется второй слой металлизации. Это позволяет расположить контактные площадки для чтения всех стрипов вдоль одной стороны сенсора. Важной особенностью сенсоров КТС является интегрирование в каждый стрип сопротивления смещения и разделительной емкости, обеспечивающей связь по переменному току между имплантом и металлизацией стрипа для считывания сигнала. Толщина сенсоров составляет 285 ± 15 мкм для сенсоров CiS и 320 ± 15 мкм для сенсоров HPC.
Для чтения сигналов с сенсора используется быстрая считывающая электроника на основе специализированной интегральной микросхемы (СИМС) STS-XYTER [6, 7]. Ключевой особенностью микросхемы является архитектура, построенная на системе потоковой обработки сигнала, без использования внешнего триггера. Микросхема имеет 128 каналов, для формирования отметки амплитуды используется 5-разрядный АЦП с регулируемым динамическим диапазоном, а для формирования отметки времени – быстрый дискриминатор. Дискретность временной отметки равна половине периода несущей частоты и в случае BM@N составляет 12.5 нс. Максимальная пропускная способность микросхемы 50 млн сигналов/c. Этот параметр также зависит от несущей частоты, используемой в эксперименте, и, помимо этого, определяется количеством используемых линий передачи сигнала для конкретной СИМС. При этом максимальная частота входного сигнала для отдельного канала составляет 500 кГц. STS-XYTER может работать с сигналами обеих полярностей. Для этого используется дополнительный инвертор сигнала на выходе с зарядово-чувствительным усилителем (ЗЧУ) при работе с зарядами отрицательной полярности.
Для чтения 1024 стрипов на каждой из сторон сенсора используются восемь СИМС STS-XYTER в бескорпусном исполнении, установленных на специализированные платы FEB. Применение бескорпусных микросхем определяется высокой плотностью считывающих каналов и ограниченным местом для размещения считывающей электроники.
Для передачи сигналов со стрипов детектора на считывающие каналы СИМС используется набор из 32-х сигнальных кабелей с алюминиевыми проводниками. Так как расстояние между проводниками на плоском сигнальном кабеле не может быть меньше 100 мкм, для считывания последовательности стрипов сенсора используется стопка из двух кабелей со взаимным смещением 50 мкм. Контактные площадки для крепления кабеля на сенсоре и микросхемах располагаются в шахматном порядке, в два ряда. Наиболее важным параметром кабеля, влияющим на соотношение сигнал/шум, является его емкость, которая не превышает 0.5 пФ/см [8].
В данной работе рассматривается влияние различных параметров модуля кремниевой трековой системы BM@N на соотношение сигнал/шум, которое является основным для трековой системы.
ЭКВИВАЛЕНТНЫЙ ШУМОВОЙ ЗАРЯД МОДУЛЯ КТС BM@N
В электрических цепях источники шума могут моделироваться в виде либо источников тока, либо источников напряжения. Так, например, ток утечки детектора Id создает шум за счет флуктуаций электронной эмиссии. Такой шум является пуассоновским, и его спектральная плотность не зависит от частоты в диапазоне полосы пропускания аналогового тракта считывающей электроники. Источник такого шума может быть обозначен на эквивалентной схеме (рис. 2) в виде источника тока, параллельного детектору. Электрическое сопротивление в схеме также является источником шума за счет создаваемых флуктуаций тепловых скоростей носителей заряда. Тепловой шум также имеет равномерный “белый” спектр. При этом сопротивление, шунтирующее вход ЗЧУ (например, Rbias детектора), работает в качестве источника шумового тока. Сопротивление, подключенное последовательно, является источником шумового напряжения. Таким источником шумового напряжения является, например, сопротивление кабеля Rcable или сопротивление металлизации стрипа ${{R}_{{{\text{Al}}}}}$. Эквивалентная схема источников шума модуля показана на рис. 2.

Дополнительным источником шума являются процессы захвата и освобождения носителей заряда в резисторах, диэлектриках и полупроводниках. Флуктуации данных процессов создают шум, мощность которого имеет спектр фликкер-шума (1/f -шум) [9].
Спектральная плотность токового шума является константой и имеет амплитуду
Амплитуда шума напряжения описывается формулой
Собственный шум тракта СИМС при этом определяется сопротивлением обратной связи ЗЧУ и входным сопротивлением тракта:
Для расчета эквивалентного шумового заряда на выходе усилителя-формирователя необходимо проинтегрировать шум по всему динамическому диапазону усилителя-формирователя. Итоговое выражение имеет вид [9]:
Вклад шума напряжения и фликкер-шума зависит от суммарной емкости на входе ЗЧУ:
где Сdet – емкость стрипа детектора, а Ccab – емкость сигнальной линии кабеля.
Коэффициенты Fi, Fv и Fvf определяются типом усилителя-формирователя, используемого в каналах СИМС. Для усилителя-формирователя типа CR–(RC)2, который применяется в медленном канале STS-XYTER, данные коэффициенты составляют: Fi = 0.64, Fv = 0.85 и Fvf' = 3.41 [10]. Типичные значения параметров модуля, используемые в расчетах приведены в табл. 1. Уровень фликкер-шума рассчитывался исходя из результатов измерений, выполненных на микросхеме без подключенного сигнального кабеля, путем экстраполяции измеренных значений с учетом емкости на входе ЗЧУ. На рис. 3 приведены результаты расчетов уровня шума в медленном канале STS-XYTER от времени формирования усилителя-формирователя. Для сравнения показаны результаты для двух различных конфигураций модуля: с минимальной и максимальной длиной сигнального кабеля и стрипа сенсора. Для модуля с малой емкостью на входе ЗЧУ разного типа шумы вносят примерно одинаковый вклад в общий шум при минимальном времени формирования усилителя-формирователя. Для модуля с высокой входной емкостью основным источником шума является шумовое напряжение, которое, в свою очередь, более чем на 74% определяется шумом, создаваемым сопротивлением смещения на сенсоре. Сравнение теоретических расчетов с результатами измерений уровня шума собранных модулей представлено ниже, в разделе “Измерение шума модуля”.
Таблица 1.
Параметры модуля КТС
| Параметр модуля | Значе-ние |
|---|---|
| Сопротивление металлизации стрипа RAl, Ом/см | 10.5 |
| Сопротивление сигнального кабеля Rcab, Ом/см | 0.6 |
| Сопротивление обратной связи ЗЧУ Ra-fb, МОм | 20 |
| Сопротивление смещения сенсора Rbias, МОм | 1.5 |
| Емкость сигнального кабеля Сcab, пФ/см | 0.4 |
| Емкость стрипа сенсора Сstr, пФ/см | 1.5 |
Рис. 3.
Зависимость уровня шума (ENC) медленного усилителя-формирователя от времени формирования сигнала Ts. Слева – результаты аналитических расчетов для модуля с длиной стрипа 20 мм и длиной кабеля 155 мм, справа – для модуля с длиной стрипа 60 мм и длиной кабеля 238 мм. Серым цветом выделен диапазон, в котором возможна регулировка времени формирования сигнала в медленном усилителе-формирователе микросхемы STS-XYTER.

Следует отметить, что приведенные расчеты не учитывают шумы питания микросхемы. Помимо шума, источником ложных срабатываний сигнального тракта микросхемы могут являться электромагнитные наводки в частотном диапазоне, совпадающем с полосой пропускания усилителя-формирователя: 1–100 МГц. Для защиты от помех используются тонкие (толщиной 15 мкм) алюминиевые экраны, закрывающие сенсор и сигнальные кабели, а также низкотоковый интерфейс передачи данных типа LVDS.
ИЗМЕРЕНИЯ ШУМА МОДУЛЯ
Измерение шума в отдельно взятом канале СИМС основано на процедуре измерения значения порогов для 32-х компараторов АЦП. Для этого используется встроенная калибровочная система СИМС, а также счетчики числа срабатываний каждого компаратора. Калибровочная система включает в себя прецизионный ЦАП и проходную емкость 100 фФ, позволяющую имитировать токовый сигнал с детектора заданной амплитуды. Так как шум канала имеет нормальное распределение, то зависимость числа срабатываний компаратора от амплитуды калибровочного сигнала при фиксированном количестве импульсов имеет характер S-кривой. Анализ S-кривых для отдельного компаратора позволяет вычислить значение уровня шума в каждом канале.
Пример распределения шумов по каналам сенсора показан на рис. 4 и 5. Данный модуль состоит из сенсора с длиной стрипов 20 мм и комплекта кабелей, средняя длина которых составляет 117 мм. В каналах с аномально низким уровнем шума (менее 500 электрон) отсутствует электрический контакт между входом СИМС и стрипом сенсора, что может быть связано с некачественной сваркой алюминиевого кабеля и контактной площадки на сенсоре или микросхеме. Наблюдается зависимость между уровнем шума и номером канала: в нечетных каналах средний уровень шума ниже, чем в четных (см. рис. 5). Это может быть связано с топологией микросхемы STS-XYTER, где четные и нечетные каналы расположены в шахматном порядке. Четные каналы расположены ближе к краю кристалла, и проводники на этих каналах длиннее, имеют большее последовательное сопротивление и более восприимчивы к наводкам [10].
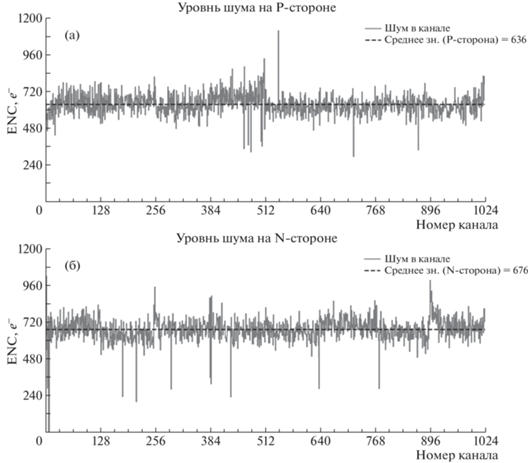
Рис. 5.
Гистограмма уровня шума в каналах детектора на P- (слева) и N-стороне (справа). Серым цветом показано распределение шума в четных каналах, черным цветом – в нечетных каналах. Общее распределение шума показано черной линией.

Так как шум зависит от емкости на входе СИМС, которая в свою очередь определяется размером сенсора и длиной кабеля, то очевидно, что шум зависит от конфигурации модуля. На рис. 6 показаны в сравнении расчетная зависимость уровня шума АЦП от входной емкости и измеренный уровень шума для нескольких конфигураций модуля. Точка 1 на графике соответствует измеренному собственному шуму микросхемы без подключенного сигнального кабеля. Точки 2 и 3 соответствуют уровню шума модулей с длиной стрипа сенсора 20 мм и длинами кабелей 117 и 155 мм; точки 4 и 5 – уровню шума модулей с длиной стрипа 60 мм и длинами кабелей 117 и 155 мм соответственно; точка 6 – уровню шума модуля с длиной стрипа 60 мм и длиной кабеля 410 мм (измерения с этим модулем выполнены в GSI [11]). Стоит отметить, что в зависимости от длин стрипа и кабеля модули обладают разным сопротивлением сигнальной линии. Влиянием этого источника шума, однако, можно пренебречь в приведенном сравнительном анализе.
Рис. 6.
Усредненный уровень шума в каналах модуля для его различных конфигураций: Точка 1 на графике соответствует измеренному собственному шуму микросхемы без подключенного сигнального кабеля; точки 2 и 3 показывают шум модулей с длиной стрипа сенсора 20 мм и длинами кабелей 117 и 155 мм соответственно; точки 4 и 5 – шум модулей с длиной стрипа 60 мм и длинами кабелей 117 и 155 мм соответственно; точка 6 – шум модуля с длиной стрипа 60 мм и длиной кабеля 410 мм. Теоретическая оценка уровня шума показана пунктирной линией.

Отличие теоретической зависимости от экспериментальной можно объяснить тем, что теоретическая модель не учитывает эффект шума и наводок по линии питания микросхемы. Исходя из полученных данных можно сделать вывод о том, что максимальный уровень шума для модулей эксперимента BM@N не будет превышать 1200 e–.
ЭФФЕКТИВНОСТЬ СБОРА ЗАРЯДА
Важнейшим параметром для трекового детектора является соотношение сигнал/шум. Под сигналом понимается амплитуда сигнала от минимально ионизирующей частицы – MIP. Такая частица должна обладать зарядовым числом 1, и для нее должно выполнятся соотношение βγ ~ 3. При прохождении через кремниевый детектор эта частица рождает на своем пути в среднем 80 электрон-дырочных пар на 1 мкм пробега. При толщине детектора 320 мкм ожидаемая амплитуда сигнала составляет 25 600е– или 4 фКл. Однако следует учитывать, что заряд, интегрируемый считывающей электроникой детектора, в общем случае не равен свободному заряду, индуцированному на сенсоре. Причиной неэффективности сбора заряда является деление свободного заряда как между стрипами сенсора, так и между сенсором и ЗЧУ, а также баллистический дефицит [12]. Следует также учитывать, что эффективность сбора заряда падает в результате облучения детектора.
Эффект баллистического дефицита возникает, когда время формирования сигнала усилителя-формирователя сопоставимо или меньше времени сбора сигнала с детектора. Время сбора сигнала с детектора определяется как [13]:
где d – толщина сенсора, ${{\mu }}$ – подвижность носителей заряда, $V$ – рабочее напряжение, ${{V}_{d}}$ – напряжение полного обеднения.
Для сенсоров эксперимента BM@N напряжение полного обеднения Vd ~ 60 В, рабочее напряжение V ~ 90 В. Время сбора заряда для электронов и дырок составляет 8 и 27 нс соответственно. Сигнал также может быть дополнительно растянут во времени при передаче его от детектора к считывающему тракту микросхемы. Учитывая максимальное сопротивление кабеля Rmax = 30 Ом и емкость Сcab = 12 пФ, получим характерное время длительности сигнала t = RmaxCcab = 0.3 нс. Поскольку минимальное время формирования усилителя-формирователя микросхемы STS-XYTER составляет 80 нс, эффектом баллистического дефицита можно пренебречь.
Эффект деления заряда между стрипами, а также между сенсором и ЗЧУ обусловлен наличием емкостных связей между элементами.
Эквивалентная схема модуля с микростриповым сенсором для оценки эффективности сбора заряда показана на рис. 7. Величина заряда, собранного на стрипе, определяется отношением разделительной емкости стрипа к суммарной емкости импланта на виртуальную “землю”. Учитывая, что Ccsa ≫ Cc, заряд, собранный на стрипе, будет равен:
где ${{C}_{{imp\_tot}}}$ – суммарная емкость импланта через соседние импланты и стрипы на “землю”. Учитывая также деление заряда в кабеле и на входе ЗЧУ, для 1-стриповых кластеров итоговая амплитуда сигнала будет равна:
где ${{C}_{{i{\text{\_}}tot}}}$ = ${{C}_{{imp\_tot}}} + {{C}_{{istr\_tot}}}$ – суммарная емкость стрипа и импланта на “землю” через соседние стрипы и импланты.
Рис. 7.
Эквивалентная схема микрострипового сенсора и считывающей электроники для расчета эффективности сбора заряда.

Для модулей эксперимента BM@N соотношение ${{Q}_{{1str}}}{\text{/}}{{Q}_{{sens}}}$ = 0.94 ± 0.05.
ИЗМЕРЕНИЕ АМПЛИТУДЫ СИГНАЛА МОДУЛЯ ПРИ ПОМОЩИ ИСТОЧНИКА β-ИЗЛУЧЕНИЯ 106Ru
Эффективность сбора заряда модуля была проверена с использованием β-источника 106Ru. Изотоп 106Ru, а также дочерний изотоп 106Rh испускают электроны непрерывного спектра с максимальной энергией излучения 3.51 МэВ и средней энергией 1.46 МэВ [14].
Для того чтобы исключить сигналы от электронов с низкими энергиями, а также от частиц, проходящих через сенсор под большими углами, во время тестирования использовались два модуля. Модули были закреплены таким образом, чтобы сенсоры были выровнены относительно друг друга и образовывали параллельные поверхности. Источник располагался рядом с поверхностью исследуемого сенсора, второй модуль использовался для отбора нужных сигналов. Для анализа отбирались события, имеющие отклик на обеих сторонах каждого сенсора. На рис. 8 показано, как выглядит распределение амплитуд сигналов для кластеров на P- и N-стороне модуля. В связи с тем, что источник имел сравнительно большую площадь, угол, под которым электроны падают на поверхность сенсора, в большинстве случаев отличен от 90°. Это вызывало одновременное срабатывание нескольких стрипов сенсора при регистрации сигналов от электронов, проходящих под большими углами к поверхности детектора. На рис. 9 показаны распределения амплитуд сигналов от 106Ru для 1-, 2- и 3-стриповых кластеров. Количество 2-стриповых кластеров превышает количество 1-стриповых для P-стороны, в то время как для N-стороны 1-стриповых кластеров больше. Такая разница вызвана более высоким порогом регистрации сигналов со стрипов N-стороны детектора.

Рис. 9.
Распределение амплитуд сигналов для 1- (сплошная линия), 2- (штриховая линия) и 3-стриповых (пунктирная линия) кластеров от β-источника 106Ru на P- (слева) и N-стороне (справа) модуля.

Ожидаемая величина амплитуды сигнала на считывающей электронике детектора для одностриповых событий с учетом неэффективности сбора заряда составит (24 ± 1.3) · 103е–. Средние значения измеренных амплитуд сигналов для четырех разных модулей приведены на рис. 10. Согласно рисунку, средняя амплитуда сигналов на P-стороне составляет (24.8 ± 0.9) · 103е–, что хорошо согласуется с ожидаемой оценкой, а на N-стороне – (22 ± 0.7) · 103е–, что на 11% меньше, чем средний сигнал на P-стороне. Мы предполагаем, что причиной такого несоответствия является паразитная емкость PSC (Polarity Selection Circuit), которая является частью аналогового тракта микросхемы. В случае P-стороны детектора, для которой основными переносчиками заряда являются дырки, данный элемент тракта не используется, и сигнал передается в обход PSC на усилитель-формирователь.

ВЫВОДЫ
По результатам проведенных аналитических вычислений и измерений можно сделать вывод о том, что в зависимости от конфигурации модуля КТС BM@N соотношение сигнал/шум модуля составляет от 18 до 30, что позволяет надежно выделять сигналы от регистрируемых частиц на фоне шума. Наблюдаемый разброс величины соотношения сигнал/шум определяется заметной разницей в уровне шума для различных конфигураций модулей, составляющих систему. Уровень шума зависит в первую очередь от шунтирующей емкости на входе ЗЧУ, т.е. от размера сенсора и длины сигнального кабеля. Стоит также учитывать, что за время выполнения физической программы эксперимента максимальная доза неионизирующего излучения для центральных сенсоров составит до 1011 1-МэВ нейтронных эквивалентов/см2. Данная доза не превышает порог инверсии проводимости n-типа в кремнии, однако может являться причиной незначительного (менее 5%) падения эффективности сбора заряда с кремниевого детектора [15]. Но даже с учетом этого эффекта соотношение сигнал/шум в конце рабочего цикла установки не должно быть ниже 16.
Список литературы
Senger P., Dementev D., Heuser J., Kapishin M., Lavrik E., Murin Y., Maksymchuk A., Schmidt H.R., Schmidt C., Senger A., Zinchenko A. // Particles. 2019. V. 2. P. 481. https://doi.org/10.3390/particles2040029
Vasiliev S.E., Galavanov A.V., Kapishin M.N., Karjavine V.Yu., Kulish E.M., Lenivenko V.V., Makankin A.M., Maksymchuk A.I., Piyadin S.M., Khabarov S.V. // Phys. Part. Nuclei Lett. 2019. V. 16. P. 859. https://doi.org/10.1134/S1547477119060542
Dementev D., Elsha V., Murin Y., Sheremetev A., Shitenkow M., Sukhov N., Baranov A., Kharlamov P., Merkin M., Lavrik E., Senger A., Senger P. // Phys. Part. Nuclei. 2022. V. 53. № 2. P. 197. https://doi.org/10.1134/S1063779622020265
CBM Collaboration. Ablyazimov T. et al. // Eur. Phys. J. 2017. V. 53. P. 60. https://doi.org/10.1140/epja/i2017-12248-y
Sheremetiev A., Dementev D., Elsha V., Kolozhvari A., Murin Y., Shitenkov M., Sukhov N. // Phys. Part. Nuclei. 2022. V. 53. № 2. P. 377. https://doi.org/10.1134/S1063779622020745
Kasinski K., Rodriguez-Rodriguez A., Lehnert J., Zubrzycka W., Szczygiel R., Otfinowski P., Kleczek R., Schmidt C.J. // Nucl. Instr. and Meth. A. 2018. V. 908. P. 225. https://doi.org/10.1016/j.nima.2018.08.076
Shitenkov M., Dementev D., Voronin A., Kovalev I., Kudryashov I., Kurganov A., Murin Yu. // Phys. Part. Nuclei. 2021. V. 52. P. 826. https://doi.org/10.1134/S1063779621040559
Panasenko I., Schmidt H.R., Lavrik E., Simons C., Schmid C.J. Microcable quality assurance: capacitance measurements. CBM Progress Report 2016. 03 2017. http://repository.gsi.de/record/201318
Spieler H. Semiconductor Detector Systems. Semiconductor Science and Technology. V. 12. Oxford University Press, 2005. P. 34.
Zubrzycka W., Kasinski K. “Noise considerations for the STS/MUCH readout ASIC”. CBM STS-XYTER 2.1 and SPADIC 2.2 Submission Review. https://indico.gsi.de/event/5976/
Rodríguez Rodríguez A. PhD thesis, Johann Wolfgang Goethe-Universität Frankfurt am Main, Frankfurt am Main, 2020
Lutz G. Semiconductor Radiation Detectors. Berlin, Heidelberg: Springer-Verlag, 2007. https://doi.org/10.1007/978-3-540-71679-2
Spieler H. Semiconductor Detector Systems. Semiconductor Science and Technology. V. 12. Oxford University Press, 2005. P. 17.
https://www.sciencedirect.com/topics/medicine-and-dentistry/ruthenium-106
3rd RD48 STATUS REPORT. CERN LHCC 2000-009. LEB Status Report/RD48. 31 December 1999. https://rd48.web.cern.ch/status-reports/RD48-3rd-status-report.pdf
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента