

Приборы и техника эксперимента, 2023, № 2, стр. 137-143
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ АКТИВНЫХ ДВУХКОНТУРНЫХ ВИБРОЗАЩИТНЫХ УСТРОЙСТВ С ПОДАВЛЕННЫМ РЕЗОНАНСОМ НЕСУЩЕЙ ПЛИТЫ
А. А. Трегубенко a, *, В. А. Мелик-Шахназаров a, В. И. Стрелов a, И. Ж. Безбах a
a Федеральный научно-исследовательский центр “Кристаллография и фотоника” РАН
119333 Москва, Ленинский просп., 59, Россия
* E-mail: kmikran@spark-mail.ru
Поступила в редакцию 04.07.2022
После доработки 09.08.2022
Принята к публикации 02.09.2022
- EDN: PWGXDQ
- DOI: 10.31857/S0032816223010251
Аннотация
Исследованы динамические характеристики активных виброзащитных устройств, состоящих из несущей плиты (установленной на упругих опорах), симметричной группы акселерометров, сервисных движителей и электрических цепей, раздельно управляющих шестью модами колебаний плиты. Система характеризуется понижением фазы на 180° в области механического резонанса плиты и таким же понижением фазы, вызванным электромеханическим резонансом сервисных движителей. Для того чтобы фазовые ограничения не снижали эффективность устройства (ширину активного диапазона частот, коэффициент пропускания вибраций), разработаны двухконтурные цепи управления, подавляющие резонанс несущей плиты. В таких устройствах достигаются следующие параметры: коэффициент пропускания шумов ≈ –60 дБ, активный диапазон частот 0.2–400 Гц для наземных лабораторных/цеховых применений и 0.02–200 Гц для применения на космических аппаратах.
1. ВВЕДЕНИЕ
В последнее время все чаще появляется необходимость в активных виброзащитных устройствах (АВЗУ), предназначенных для изоляции от вибраций аналитической и технологической аппаратуры в наземных лабораторных/цеховых условиях, а также для авиакосмических и транспортных применений. Для этой цели используются широко распространенные коммерческие устройства [1], основой которых является несущая плита, установленная на упругих опорах, а также группа акселерометров и сервисных движителей, включенных в восемь электрических цепей управления. Такими устройствами подавляются все шесть мод колебаний несущей плиты, однако нижняя граница активного диапазона частот расположена вблизи 2 Гц, а максимальный коэффициент подавления 35–40 дБ достигается при ≈10 Гц, что для многих применений является недостаточным. Необходимо отметить, что граничная частота ≈2 Гц является “врожденным пределомˮ предлагаемых конструкций, поскольку при частотах ≤2 Гц инерционный сигнал акселерометра подавляется паразитным статическим сигналом наклона, вызванным изменением проекции силы тяжести инерционной массы акселерометра на ось его чувствительности при наклонах плиты.
В работе [2] описана конструкция АВЗУ с ортогональной симметричной группой акселерометров и сервисных движителей, включенных в электрические цепи для раздельного управления шестью модами колебаний несущей плиты. Это позволяет осуществить компенсацию паразитного сигнала наклона акселерометров так, что нижняя граница активного диапазона частот может быть понижена до ≈0.2 Гц, а максимальный коэффициент подавления вибраций увеличен до ≈60 дБ.
В работе [3] исследовалось влияние конструктивных элементов, дополняющих “базовуюˮ модель АВЗУ, на ее эффективность и возможность адаптации к различным габаритам и массе защищаемых объектов, а также условиям эксплуатации. Было отмечено, что устойчивость цепей управления на границах заданного активного диапазона частот обеспечивается электрическими корректирующими звеньями. В то же время показано, что в актуальном диапазоне частот в цепи наблюдается понижение фазы на 360°, связанное с двумя резонансами: механическим резонансом несущей плиты и электромеханическим резонансом сервисного движителя. Это создает фазовые ограничения, снижающие возможность корректировки цепей управления, что приводит к сужению (часто неприемлемому) активного диапазона частот.
В связи с этим были проведены исследования, которые показали, что добавление к цепи управления АВЗУ второго дополнительного контура, предназначенного для подавления резонансных колебаний несущей плиты, снимает указанные ограничения и дополняет устройство новыми важными характеристиками.
2. КОНСТРУКЦИЯ И СТРУКТУРНАЯ СХЕМА УСТРОЙСТВА С ДВУХКОНТУРНЫМ УПРАВЛЕНИЕМ. ФУНКЦИОНАЛЬНАЯ СХЕМА И ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
Очевидно, что при конструировании АВЗУ с независимым управлением шестью модами колебаний несущей плиты [2] конструкционные и динамические характеристики шести одномодовых парциальных устройств могут быть рассчитаны раздельно.
Показанная на рис. 1 одномодовая конструкция устройства содержит дополнительный контур управления, предназначенный для подавления резонанса сервисного движителя или несущей плиты (что является аналогичным, так как нагрузкой электродинамического преобразователя является импеданс плиты). Главная цепь управления включает в себя несущую плиту массой ${{m}_{1}}$, которая опирается на упругий элемент ${{c}_{1}}$. На плите установлен акселерометр А1 и магнитная система электродинамического преобразователя – опорного магнитоэлектрического движителя Дв (катушка которого установлена на опорной плите). Электрические цепи управления с функцией передачи ${{W}_{{{\text{1o}}{\text{.о}}{\text{.c}}}}}(i\omega )$ замыкают цепь отрицательной обратной связи, что подавляет передачу внешних вибраций $n(t)$ от опорной плиты к несущей. Подробно структурная схема и динамические звенья главного контура управления АВЗУ описаны в [3].
Рис. 1.
Одномодовая схема конструкции АВЗУ с дополнительным контуром управления, предназначенным для подавления резонанса несущей плиты ${{m}_{1}}$.
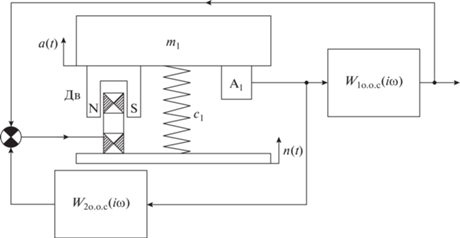
Второй контур управления, служащий для подавления резонанса несущей плиты, содержит акселерометр А1, электрические цепи обратной связи ${{W}_{{2{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )$ и движитель Дв. Следует отметить, что активное подавление резонанса подвижной системы электродинамических преобразователей с целью повышения их качества впервые было предложено В.С. Григорьевым и В.В. Фурдуевым в 1937 году (цитируется по [4, 5]).
На рис. 2 представлена структурная схема рассматриваемой конструкции АВЗУ, включающая, кроме основного, дополнительный контур управления. Первый, главный, контур управления (подробно исследован в [2]) представлен в замкнутом и разомкнутом (показан штриховой стрелкой) видах. Он состоит из следующих динамических звеньев: акселерометра А1, усилителя сигнала акселерометра ${{K}_{{\text{A}}}}$, электрических корректирующих цепей ${{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )$ и сервисного движителя $W(i\omega )$. Функция передачи последнего определяется электрическим импедансом катушки электродинамического преобразователя $Z(i\omega )$, нагруженного механическим импедансом несущей плиты, установленной на упругих опорах ${{W}_{1}}(i\omega )$, и коэффициентом электромеханической связи преобразователя [3, 6]. Таким образом, во избежание разночтений следует отметить, что $W(i\omega )$, являющаяся по определению функцией передачи движителя, в рассматриваемой конструкции непосредственно описывает движение несущей плиты.
Рис. 2.
Структурная схема одномодовой конструкции АВЗУ с вторым, дополнительным, контуром управления, предназначенным для подавления резонанса несущей плиты. Штриховой стрелкой показан главный контур управления в разомкнутом состоянии.
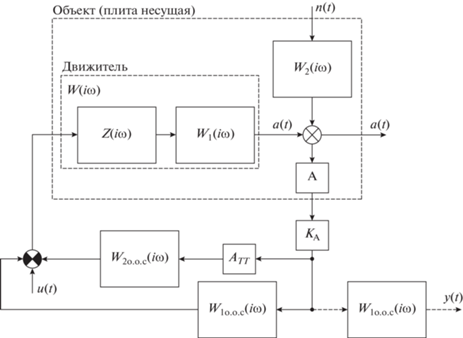
Динамическое звено ${{W}_{2}}(i\omega )$, подключенное к главному контуру управления, представляет собой параллельный резонанс плиты (установленной на упругие опоры), входным сигналом которого, как видно из рис. 1, является смещение свободного (опорного) конца упругого элемента $n(t)$. В последовательном резонансе плиты ${{W}_{1}}(i\omega )$ входным сигналом является сила, приложенная электродинамическим преобразователем к массе ${{m}_{1}}$. Как видно из структурной схемы на рис. 2, звено ${{W}_{2}}(i\omega )$, не входящее в замкнутый контур управления, представляет собой фильтр входного (внесенного) сигнала $n(t)$ виброзащитного устройства [3].
Второй контур управления, собственно предназначенный для подавления резонансных колебаний плиты, содержит следующие динамические звенья: акселерометр А, усилитель сигнала акселерометра ${{K}_{{\text{A}}}}$, аттенюатор ${{{\text{A}}}_{{ТТ}}}$, корректирующие электрические цепи ${{W}_{{2{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )$ и собственно сервисный движитель $W(i\omega )$.
3. ПОДАВЛЕНИЕ РЕЗОНАНСА НЕСУЩЕЙ ПЛИТЫ ТИПИЧНОГО АКТИВНОГО ВИБРОЗАЩИТНОГО УСТРОЙСТВА
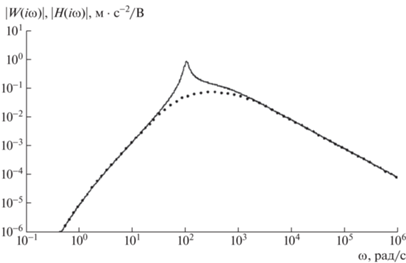
Далее, без ущерба для понимания общих закономерностей, приведем расчет рассматриваемого устройства для конкретного экспериментального макета АВЗУ [3, 6]. Кривая модуля функции передачи движителя ${\text{|}}W(i\omega ){\text{|}}$ на рис. 3 получена для макета с несущей плитой массой ≈23 кг, установленной на четырех пружинах с податливостью $c = 5.5 \cdot {{10}^{{ - 6}}}$ м/Н. Электродинамические преобразователи состоят из установленных на опорной плите катушек с электрическим сопротивлением R = 12 Ом и индуктивностью L = 22 мГн и магнитов, закрепленных на несущей плите. Магнитная индукция в зазоре магнитов В ≈ 0.2 Тл, длина провода в магнитном поле l = 50 м, так что коэффициент электромеханической связи движителей $K = Bl = 10$.
Рис. 3.
Модули функции передачи несущей плиты $W(i\omega )$ (сплошная линия) и $H(i\omega )$ (пунктирная линия) с подавленным резонансом.
Для математического описания динамики рассматриваемого устройства используется метод структурной схемы, которая, как видно из рис. 2, состоит из однонаправленных динамических звеньев, каждому из которых соответствует определенная функция передачи. В сущности схема представляет собой графическое изображение системы дифференциальных уравнений, описывающих динамику всех частей конструкции. Этот метод в данном случае предпочтительнее обычной математической записи уравнений, так как позволяет весьма просто, используя правила теории электрических цепей, “свертыватьˮ уравнения в одно для получения функций передачи соединений механических и электрических импедансов [7, 8].
Важно, что метод структурных схем устанавливает соответствие каждого динамического звена определенному конструктивному элементу устройства. Это позволяет определять также необходимые физические параметры механических и электрических элементов конструкции, исходя из заданных заранее, основных характеристик устройства. Необходимый анализ выполняется несложным способом с помощью компьютерной программы, рассчитанной для вычисления функций с комплексными переменными.
Согласно схеме на рис. 2, “сверткаˮ, по правилам теории цепей, проводится следующим образом. Функция передачи последовательной цепи динамических звеньев равна произведению функций передачи звеньев цепи. Функция передачи замкнутой цепи с отрицательной обратной связью (контура управления) представляет собой дробь, числителем которой является произведение функций передачи динамических звеньев, включенных в прямом направлении, а знаменателем – единица плюс произведение функций передачи всех звеньев замкнутой цепи.
Рассмотрим вначале функцию передачи движителя $W(i\omega )$, которая, как показано в [6], может быть записана следующим образом:
(1)
$W(i\omega ) = \frac{a}{u} = - i\omega {{\left( {\frac{{Z(i\omega )z(i\omega )}}{K} + K} \right)}^{{ - 1}}}.$Как уже отмечалось, в рассматриваемой конструкции АВЗУ механической стороной движителя (нагрузкой электродинамического преобразователя), согласно рис. 1, является несущая плита, т.е. непосредственно объект управления, и в уравнении (1) $z(i\omega ) = {{W}_{1}}(i\omega )$. Поэтому $W(i\omega )$ представляет собой функцию передачи несущей плиты.
Согласно рис. 3, на кривой ${\text{|}}W(i\omega ){\text{|}}$ наблюдаются резонанс несущей плиты, а также аномалии асимптотических кривых. Во-первых, в области частот выше ≈20 Гц высокочастотная асимптота приобретает наклон –20 дБ/дек, а во-вторых, при частотах ниже ≈1 Гц низкочастотная асимптота приобретает дополнительный наклон 20 дБ/дек (так что суммарный наклон ниже 1 Гц увеличивается от 40 до 60 дБ/дек). Наблюдаемые аномалии являются следствием так называемого электромеханического резонанса в конструкции движителя, который в свою очередь вызван появлением в электрической цепи движителя внесенного электрического импеданса (и соответственно упомянутой выше внесенной электрической емкости ${{C}_{{{\text{вн}}}}} = m{\text{/}}{{K}^{2}}$) из-за появления ЭДС в катушке, движущейся в магнитном поле [6].
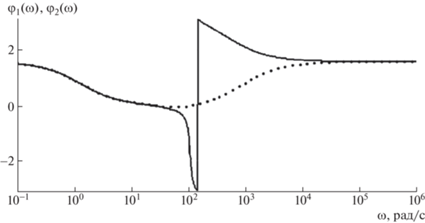
Согласно рис. 4, движитель характеризуется понижением фазы ${{\varphi }_{1}}(\omega )$ на 180° вблизи механического резонанса, а также понижением фазы на 90° в области частот ниже ~1 Гц и на столько же – выше ~20 Гц в результате так называемого электромеханического резонанса движителя [6]. Очевидно, что суммарное понижение фазы на 360° в рабочей области частот ограничивает возможности создания цепей управления с заданными характеристиками.
Рис. 4.
Фазовые кривые: сплошная линия – сервисного движителя ${{\varphi }_{1}}(\omega ) = \arg W(i\omega )$; пунктирная линия – движителя с подавленным резонансом ${{\varphi }_{2}}(\omega ) = \arg H(i\omega )$.
Для уменьшения в цепях управления фазовых ограничений в рассматриваемой конструкции (как отмечалось выше) предусмотрено подавление механического резонанса движителя. Функция передачи второго контура управления, служащего для этой цели (см. рис. 2), может быть записана следующим образом:
(2)
$H(i\omega ) = \frac{a}{u} = \frac{{W(i\omega )}}{{1 + {{W}_{{2{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )W(i\omega )}}.$На рис. 3 модуль функции передачи движителя с подавленным механическим резонансом ${\text{|}}H(i\omega ){\text{|}}$ показан пунктирной кривой. Для расчетов в (2) использовалось активное звено ${{W}_{{2{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega ) = 20$ В/(м ⋅ с–2) (в этом коэффициенте учтены также коэффициенты передачи остальных звеньев цепи, т.е. акселерометра, усилителя и аттенюатора).
Как видно из рис. 4, на кривой ${{\varphi }_{2}}(\omega )$ для движителя с подавленным резонансом, в отличие от ${{\varphi }_{1}}(\omega )$, понижение фазы на 180° в области частот вблизи 15 Гц отсутствует. Это важное обстоятельство, так как теперь из-за уменьшения фазовых ограничений расширяются возможности создания цепей управления с заданными амплитудно- частотными характеристиками.
На рис. 2 и 3 видно, как распределяются токи в двух контурах управления в зависимости от частоты и амплитуды сигнала. Сравнения кривых ${\text{|}}W(i\omega ){\text{|}}$ и ${\text{|}}H(i\omega ){\text{|}}$ на рис. 3 показывает, что второй контур, описываемый уравнением (2) c ${{W}_{{2{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )$ = = 20 В/(м · с–2), активен только в узком диапазоне частот вблизи резонансного максимума (в области $20{\text{|}}W(i\omega ){\text{|}} \geqslant 1$). Из рис. 3 также видно, что управление между двумя контурами будет разделяться по амплитуде, если ограничить динамический диапазон усиления первого контура так, чтобы во всем активном диапазоне частот устройства выполнялось соотношение ${\text{|}}{{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega ){\text{||}}W(i\omega ){\text{|}}$ ≤ ≤ $20{\text{|}}W(i\omega ){\text{|}}$. Очевидно, что в данном случае динамический диапазон усилителя в цепи первого контура должен быть ≈60 дБ (соответствует заданному максимальному коэффициенту подавления вибраций).
Функция передачи разомкнутого первого контура, как видно из структурной схемы на рис. 2, при выключенном втором контуре определяется соотношением $y = uW(i\omega ){{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )P$, а при включенном втором контуре, подавляющем резонанс плиты, – $y = uH(i\omega ){{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )P$ (здесь $P$ – полный коэффициент передачи всех звеньев контура).
Функция передачи замкнутого первого контура цепи управления при условии подавленного резонанса плиты в соответствии со структурной схемой на рис. 2 определяется уравнениями:
(3)
${{F}_{1}}(i\omega ) = \frac{a}{n} = \frac{1}{{1 + H(i\omega ){{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )}}$(4)
${{F}_{2}}(i\omega ) = \frac{a}{n} = \frac{1}{{1 + H(i\omega ){{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega )}}{{W}_{2}}(i\omega )$Согласно рис. 5, функция ${\text{|}}{{F}_{2}}(i\omega ){\text{|}}$, представляющая собой кривую пропускания (или подавления) шумовых колебаний n(t) АВЗУ от опорной плиты к несущей (см. рис. 1), понижается от нижней границы активного диапазона ~0.3 Гц до ~20 Гц с наклоном –40 дБ/дек, затем слабо меняется на уровне –60 дБ до верхней границы активного диапазона, выше которой приобретает наклон ‒20 дБ/дек. Отметим, что в (3) и (4), так же как в (2), в цепи обратной связи использовалось активное звено, в данном случае ${{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega ) = 5 \cdot {{10}^{3}}$ В/(м · с–2) (этот коэффициент учитывает также коэффициенты передачи остальных звеньев цепи, усилителя и акселерометра), поскольку при расчетах не ставилась задача получения полной кривой, включающей граничные области.

4. ЗАКЛЮЧЕНИЕ
Характерной особенностью динамики рассматриваемых АВЗУ, состоящих из несущей плиты (установленной на упругих опорах), симметричной группы акселерометров, сервисных движителей и электрических цепей, раздельно управляющих шестью модами колебаний плиты, является понижение фазы на 180° в области механического резонанса плиты и такое же понижение фазы, вызванное электромеханическим резонансом сервисных движителей. Суммарное понижение фазы, достигающее 360°, создает фазовые ограничения, существенно снижающие возможность корректировки цепей управления, что неприемлемо сужает активный диапазон частот. В настоящей работе показано, что добавление к цепи управления АВЗУ второго дополнительного контура, предназначенного для подавления резонансных колебаний несущей плиты, снимает эти затруднения.
Показано, что электрические характеристики обоих контуров управления должны быть согласованы с физическими свойствами объекта управления, как, например, в двухконтурном управлении электродвигателем по скорости вращения и току в обмотке [9]. Учет таких характеристик рассматриваемого объекта управления, как добротность резонанса несущей плиты, нижняя граница активного диапазона частот устройства и мощность магнитоэлектрических движителей, позволяет определить коэффициенты усиления в главном и вспомогательном контурах, а также динамический диапазон усилителя в главном контуре, что дает возможность обеспечить раздельное управление движением плиты в области резонанса и области асимптот.
Как отмечалось выше, главной целью создания двухконтурной схемы управления является расширение активного диапазона частот АВЗУ в сторону как низких, так и высоких частот.
В области низких частот подавление резонанса несущей плиты позволило сместить нижнюю границу активного диапазона устройства до ≤0.2 Гц (до ≤0.02 Гц в космических аппаратах). Нужно отметить, что предложенный метод позволяет преодолеть второй фактор, ограничивающий активный диапазон частот устройства со стороны низких частот (первый ограничивающий фактор, рассмотренный в [2], упомянут во Введении). Важно также то, что наклон кривой активного подавления АВЗУ в области частот ниже резонанса плиты может составлять от –20 до –60 дБ/дек (на рис. 5 в отсутствие корректирующих звеньев наклон в диапазоне частот от 0.3 до 20 Гц составляет ≈ –40 дБ/дек). Возможность варьирования величины наклона кривой активного подавления шумов в области низких частот может иметь решающее значение при проектировании АВЗУ с определенными требованиями/характеристиками. К последним, например, можно отнести: низкую граничную частоту, высокий коэффициент подавления шумов, большие габариты и массу защищаемого объекта, работу в транспортных средствах и в космических аппаратах. Иными словами, АВЗУ со вторым контуром управления приобретает способность к широкодиапазонной адаптации по ряду функциональных/эксплуатационных параметров.
В области высоких частот ограничение активного диапазона АВЗУ связано с резонансами поперечных колебаний несущей плиты (обычно выше 400–500 Гц). Здесь, благодаря уменьшению фазовых ограничений, вблизи верхней границы активного диапазона частот наклон кривой ${\text{|}}H(i\omega ){\text{||}}{{W}_{{1{\text{о}}{\text{.о}}{\text{.с}}}}}(i\omega ){\text{|}}$ может быть увеличен с помощью корректоров, так что верхняя граница активного диапазона частот понижается настолько, чтобы исключить возбуждение резонансов поперечных колебаний несущей плиты.
Усилители сигнала акселерометров, являющиеся ответственным звеном устройства, в условиях подавленного резонанса плиты работают в значительно облегченных условиях. Как видно из рис. 3, в области частот ниже резонанса плиты модуль функции передачи быстро понижается (40 и 60 дБ/дек ниже ≈1.5 Гц) и при частотах 0.2–0.3 Гц достигает величины ≈10–4${\text{м}}\, \cdot \,{{{\text{с}}}^{{ - {\text{2}}}}}$/B. Поэтому в АВЗУ с низкой граничной частотой активного диапазона используются высокочувствительные акселерометры и усилители с большим коэффициентом усиления. В связи с тем что в цепях с подавленным резонансом плиты динамический диапазон усилителей существенно (на 20–30 дБ) уменьшен, разработка усилителей значительно облегчается. В рассмотренной конструкции устанавливается динамический диапазон ≈60 дБ (вместо 80–90 дБ).
Список литературы
Active Vibration Control. https://www.herzan.com/products/active-vibration-control.html
Мелик-Шахназаров В.А., Стрелов В.И., Софиянчук Д.В., Безбах И.Ж. // Письма в ЖТФ. 2012. Т. 38. № 6. С. 61.
Мелик-Шахназаров В.А., Стрелов В.И., Софиянчук Д.В., Безбах И.Ж. // Научное приборостроение. 2012. Т. 22. № 3. С. 46.
Митрофанов Ю., Пикерсгиль А. // Радио. 1970. № 5. С. 25.
Эфрусси М. // Радио. 1974. № 7. С. 32.
Мелик-Шахназаров В.А., Стрелов В.И., Софиянчук Д.В., Трегубенко А.А. // Инженерная физика. 2017. № 2. С. 20.
Дорф Р., Бишоп Р. Современные системы управления / Пер. с англ. М.: Лаборатория базовых знаний, 2002.
Основы автоматического управления / Под ред. В.М. Пономарева, А.П. Литвинова. М.: Высшая школа, 1974.
Первозванский А.А. Курс теории автоматического управления. М.: Наука, 1986.
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента