Автоматика и телемеханика, № 1, 2019
Нелинейные системы
© 2019 г. А.А. ГАЛЯЕВ, чл.-корр. РАН (galaev@ipu.ru),
П.В. ЛЫСЕНКО (pashlys@yandex.ru),
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ОПТИМАЛЬНОЕ ПО ЭНЕРГИИ УПРАВЛЕНИЕ
ГАРМОНИЧЕСКИМ ОСЦИЛЛЯТОРОМ1
Решается задача оптимального управления гармоническим осциллято-
ром. В качестве критерия оптимизации выбрано значение энергии осцил-
лятора в конечный момент времени. Находятся оптимальное управление
и оптимальное значение энергии как функции этого момента времени. По-
лученный результат сравнивается с решением задачи оптимального быст-
родействия при приведении осциллятора в состояние покоя.
Ключевые слова: оптимальное управление, принцип максимума Понтря-
гина, гармонический осциллятор.
DOI: 10.1134/S0005231019010021
1. Введение
Решение задачи оптимального управления гармоническим осциллятором
является одним из важнейших и показательных результатов, полученных в
теории оптимального управления. В данной статье исследуются задачи оп-
тимального управления осциллятором, изначально находящимся в состоянии
покоя, по критерию, максимизирующему конечную энергию системы в фик-
сированный момент времени T . Критерий может быть записан в интеграль-
ном виде
∫T
dE
(1.1)
J = E(T) =
dt -→ max .
dt
0
Известно, что эта задача схожа с задачей быстродействия D.W. Bushaw, опи-
санной в [1], однако до сих пор не рассматривалась, хотя ее решение может
представлять научный и практический интерес. Кроме того, в статье будет
произведено сравнение оптимальных решений в обеих указанных задачах.
До открытия принципа максимума Понтрягина задача быстродействия
для приведения гармонического осциллятора в нулевую точку представля-
ла собой серьезное испытание для математиков того времени. Полученное в
диссертации D.W. Bushaw 1952 г. решение этой задачи было настолько гро-
моздким, что Р.В. Гамкрелидзе в [2] написал: “Результат, без доказательства,
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (проект № 16-08-01285 а).
21
достиг Москвы в 1953 г., и два ведущих специалиста в области (управления),
в Научно-исследовательском институте системных исследований АН СССР,
не смогли восстановить (получить) доказательство”.
Задачи управления как одиночным осциллятором, так и группой осцилля-
торов привлекали внимание исследователей по причине простоты постановок
и сложности получаемых решений.
В [1] приведено одно из первых решений задачи быстродействия для при-
ведения осциллятора в нулевую точку при симметричном двустороннем огра-
ничении на управление с помощью принципа максимума Понтрягина, осно-
ванное на анализе фазовых траекторий системы. В [3] на фазовой плоскости
приводится вид всех оптимальных траекторий, они имеют форму спирали с
конечным числом переключений. Однако значение функционала как функ-
ции начального положения осциллятора не приводится. Аналитическое реше-
ние для программного управления задачи быстродействия одиночным осцил-
лятором получено в [4], где был исследован случай воздействия ограничен-
ного одностороннего управления и решена задача оптимального управления
осциллятором с целью его полной остановки по двум критериям качества: по
критерию минимального времени и критерию минимума импульса, передан-
ного системе управляющим устройством.
Задача управления несколькими осцилляторами описана академиком
Ф.Л. Черноусько в [5]. Там же доказана управляемость системы, состоящей
из n осцилляторов, и приведен алгоритм решения для задачи симметричного
разгона двух маятников. Аналитического решения в общем виде получить
не удалось. Для системы несинхронных маятников в [6] получен алгоритм
решения задачи оптимального быстродействия.
Помимо критерия быстродействия, наиболее популярными критериями
являются
∫T
Jk =
|u(t)|kdt, k = 1, 2.
0
Критерий J1 отвечает минимуму переданного системе импульса, а J2 - ми-
нимальному расходу энергии при управлении.
Отдельный класс задач составляют задачи построения областей достижи-
мости для управляемых систем [7]. Граничные точки множества достижимо-
сти для одиночного осциллятора могут быть получены вследствие решения
задачи оптимального управления с фиксированными временем и одной из
обобщенных координат по критерию максимума другой координаты.
2. Постановка задачи оптимального управления
Рассматривается линейный осциллятор, управляемый с помощью ограни-
ченной по величине силы. Уравнения динамики системы имеют вид
{
˙q(t) = p(t),
(2.1)
p(t) = -ω2q(t) + u(t),
где q - положение маятника, а p - его импульс, ω - частота колебаний.
22
Считаем, что на скалярное управление (силу) наложено симметричное
ограничение
|u| ≤ ε.
Поскольку в начальный момент осциллятор покоится, то начальные усло-
вия для (2.1) нулевые:
q(0) = 0,
(2.2)
p(0) = 0.
Требуется найти оптимальный закон управления u∗(t) такой, что по ре-
шению системы (2.1) с начальными условиями (2.2) достигается максимум
критерия (1.1).
3. Решение задачи
3.1. Принцип максимума
Известно, что энергия осциллятора равна
2
ω2q(t)
p(t)2
E(t) =
+
2
2
Преобразуем выражение для критерия (1.1) с использованием уравнений ди-
намики (2.1) и получим, что критерий принимает вид
T
T
∫T
∫
∫
dE
J =
dt = (ω2q
˙q + pp)dt = (ω2qp + p(-ω2q + u))dt =
dt
0
0
0
∫T
= pudt -→ max .
u
0
Для каноничности переобозначим выражение, устремив критерий к миниму-
му, а именно:
∫T
(3.1)
J = - pudt -→ min.
u
0
Далее для решения задачи оптимального управления (2.1)-(3.1) используем
принцип максимума Понтрягина. Функция Понтрягина записывается как
(3.2)
H(q, p, Ψ1, Ψ2, u) = Ψ1p - Ψ2ω2q + Ψ2
u + pu.
Поскольку искомое u∗(t) должно максимизировать H, следовательно за-
кон оптимального управления имеет вид
(3.3)
u∗(t) = ε sign(Ψ2
(t) + p(t)).
23
Уравнения для сопряженных переменных записываются как
{
Ψ1 = ω2Ψ2,
(3.4)
Ψ2 = -Ψ1 - u.
Теперь обратим внимание, что поскольку решаемая задача с фиксирован-
ным временем и свободным правым концом, то имеют место такие условия
трансверсальности:
{ Ψ1(T) = 0,
(3.5)
Ψ2(T) = 0.
Далее совершим линейную замену переменных
{ Ψ1 =ΨI -ω2q,
(3.6)
Ψ2 = ΨII - p
и п одставим в (3.4). Получим новую систему для сопряженных переменных
{
ΨI - ω2
˙q = ω2(ΨII - p),
ΨII - p = -ΨI + ω2q - u.
Учет (2.1) приводит последнюю систему к виду, в котором нет зависимости
от обобщенных координат и управления, а именно:
{
ΨI = ω2ΨII,
(3.7)
ΨII = -ΨI.
Общим решением системы (3.7) являются гармонические функции с неиз-
вестными амплитудой A > 0 и фазой φ:
{ ΨI = ωAsin(ωt + φ),
(3.8)
ΨII = Acos(ωt + φ).
С учетом (3.8) закон оптимального управления (3.3) принимает вид
(3.9)
u∗(t) = ε signΨII
(t) = ε sign cos(ωt + φ).
Это означает, что управление переключается между своими крайними зна-
чениями в моменты времени
π
(3.10)
ωtk =
− φ + π(k - 1), k = 1,...,K,
2
где K - количество переключений управления, равное
]
[ω(T - t1)
(3.11)
K =1+
π
24
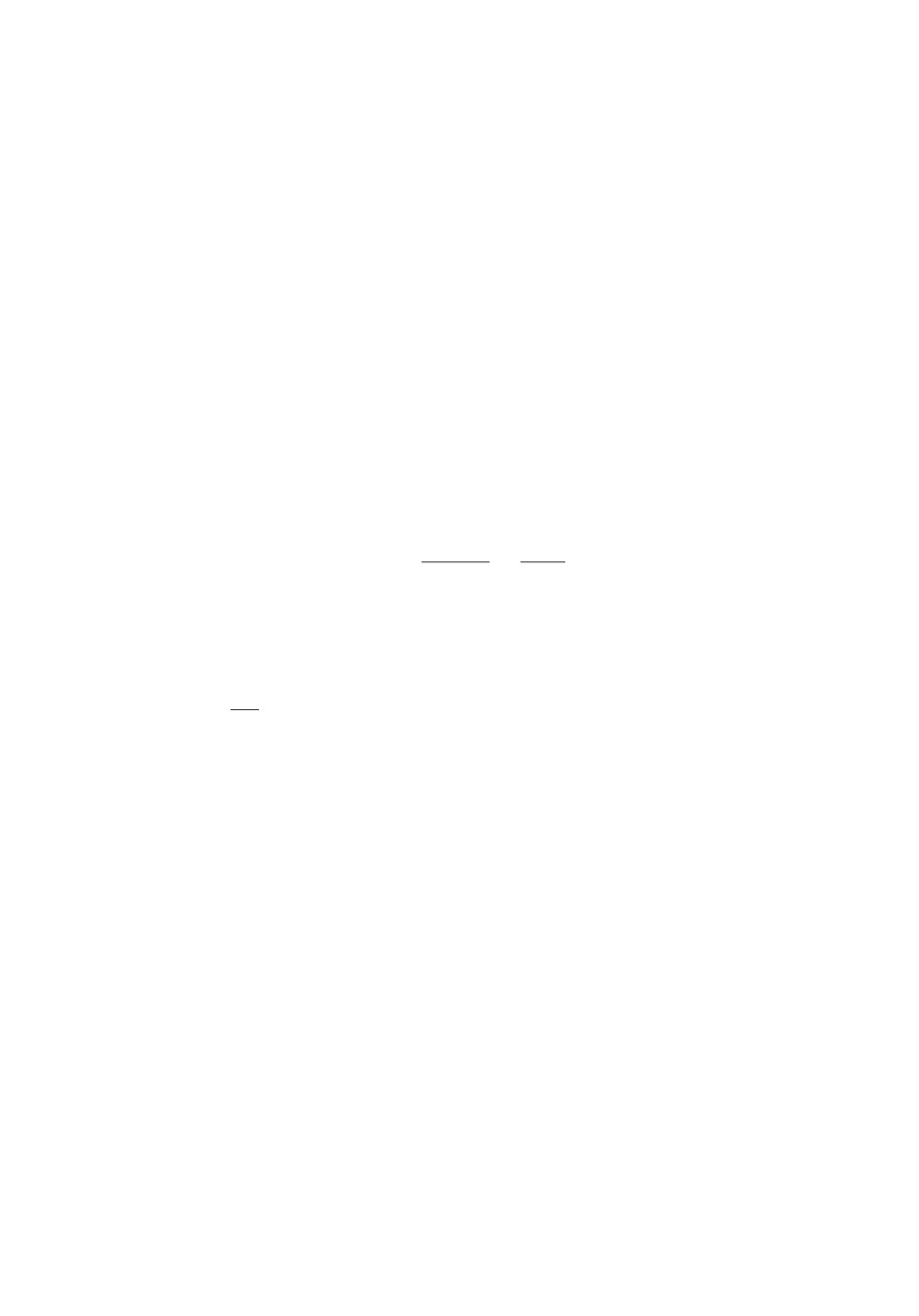
Рис. 1. Вид оптимального управления.
Квадратные скобки здесь означают целую часть числа. Из (3.11) сразу следу-
ет, что K ≥ 1 при любом T > t1 в задаче максимизации энергии осциллятора.
Случай с K = 0 будет рассмотрен и проанализирован после леммы 2. Момент
первого переключения
π
φ
(3.12)
t1 =
-
2ω
ω
должен удовлетворять условию 0 < ωt1 < π, а значит, -π2 < φ <π2 . Таким
образом, переключение управления происходит каждыеπω секунд. Первый
и последний интервалы управления отличны отπω . Так как в данной поста-
новке начальное значение управления не влияет на решение задачи, выберем
u∗(0) = ε. На рис. 1 показана зависимость оптимального управления от вре-
мени.
Поскольку данный закон решения допускает особые экстремали, возмож-
ные в случае
{ ΨI(t) ≡ 0,
(3.13)
ΨII(t) ≡ 0,
покажем, что они не могут содержаться в искомом решении. Из условий
трансверсальности (3.5) и (3.13) следует, что
{ q(T) = 0,
(3.14)
p(T ) = 0.
Однако последнего не может быть, так как E(T ) > 0. Если же на некотором
интервале времени t ∈ [t′, t′′] выполнено (3.13), то из справедливости этих
равенств в момент времени t′′ и из (3.8) следует, что A = 0. Тогда верно (3.13)
в момент времени T , и поэтому справедливо (3.14), а это невозможно, как
показано ранее. Таким образом, доказано, что особые экстремали не могут
содержаться в исходном решении.
25
Для решения задачи достаточно найти момент первого переключения t1.
Перепишем (3.5) с учетом полученных для сопряженных переменных формул
и получим, что
{ Asin(ωT + φ) = ωq(T),
(3.15)
A cos(ωT + φ) = p(T ).
Видно, что если найти p(T ) и q(T ) как функции t1, то, учитывая (3.12), из
системы (3.15) можно получить искомый момент t1.
3.2. Замечания о фазовом портрете
Для нахождения фазовых координат системы в конечный момент времени
обратимся к фазовому портрету.
Рассмотрим фазовые кривые одного осциллятора, описываемого уравне-
ниями динамики (2.1) на фазовой плоскости (q, p) при прикладывании к нему
конкретного управления u. Пусть u = ε:
{
˙q(t) = p(t),
p(t) = -ω2q(t) + ε.
Второе уравнение записывается в виде (зависимость от t здесь и далее опус-
каем для удобства)
(
ε )
q+ω2
q-
= 0.
ω2
Его решение имеет вид
{
ε
q = Rcos(-ωt + γ0) +
,
ω2
p = Rω sin(-ωt + γ0),
где R - константа, алгебраический и геометрический смыслы которой будут
раскрыты далее по тексту, γ0 - некоторая фаза, а знак минус перед частотой
показывает на фазовой плоскости движение по часовой стрелке.
Аналогичные рассуждения можно провести для случая u = -ε. Результат
будет идентичен предыдущему с разницей лишь в знаке перед вторым сла-
гаемым первого уравнения системы. Итак, фазовыми траекториями системы
являются окружности
(
)2
)2
ε
(p
q∓
+
=R2
ω2
ω
(
)
с центром в точке с координатами e
± εω2,0 . По этим окружностям фазовая
точка движется по часовой стрелке c угловой скоростью ω.
26
3.3. Исследование структуры решения
Используя выводы из подраздела 3.2, можно представить вид фазовой
траектории, приведенный на рис. 2 для исследуемой задачи с законом опти-
мального управления, показанным на рис. 1.
Здесь точками показаны состояния осциллятора на фазовой плоскости в
начальный, конечный моменты и моменты переключения управления. Видно,
что координаты первой точки переключения определяются соотношениями
⎧
⎨ q1 =ε
(1 - cos(ωt1)),
ω2
⎩ p1 =ε
sin(ωt1)
ω
с
ε
R=
,
γ0 = π,
ω2
а общий вид координат точек переключения -
⎧
(
ε )
⎨ qk
= (-1)(k-1) q1 + 2(k - 1)
,
(3.16)
ω2
⎩ pk = (-1)(k-1)p1.
Знак в системе (3.16) определяется четностью k и соответствует описанию
движения осциллятора между k - 1 и k переключениями управления, т.е. ин-
тервалу движения с номером k. Последнее переключение имеет номер k = K,
Рис. 2. Фазовый портрет осциллятора с ω = 1, ε = 1 с переключениями со-
гласно закону (3.10) и произвольным моментом t1.
27
определяемый (3.11), поэтому интервал времени, отвечающий заключитель-
ному участку движения, равен
(K - 1)π
(3.17)
ΔtL = T - t1 -
ω
Рассмотрим движение фазовой точки на заключительном интервале дви-
жения от положения (qK , pK ) до (q(T ), p(T )). Поскольку интервал движения
имеет номер K + 1, то для соответствующих координат справедливы соотно-
шения
⎧
ε
⎪
qK = (-1)K
+ Rcosγ,
⎪
ω2
⎪
⎨
pK = ωRsin γ,
(3.18)
⎪
ε
⎪
q(T ) = (-1)K
+ Rcos(-ωΔtL + γ),
⎪
ω2
⎩
p(T ) = ωR sin(-ωΔtL + γ),
где |R| - радиус окружности движения, γ - начальный угол, (-1)Kε
- опре-
ω2
деляет сдвиг центра окружности по оси q на фазовой плоскости. Далее, из
уравнений (3.16) и первого момента переключения управления для систе-
мы (3.8) следует, что
⎧
(
)
sin(ωt1)
⎪
⎨ γ = arctg
,
2K - cos(ωt1)
(3.19)
⎪
εsin(ωt1)
⎩R=
(-1)(K-1).
ω2 sinγ
Поделив второе и первое уравнения (3.15) друг на друга и использовав (3.18),
получаем
(
)
π
(-1)K ε + Rω2 cos(-ωΔtL + γ)
(3.20)
tg ωT +
- ωt1
=
2
Rω2 sin(-ωΔtL + γ)
Решение уравнения (3.20) даeт искомое t1. Аналитическое решение (3.20)
определяется следующей леммой.
Лемма 1. Пусть ΔtL определяется выражением (3.17), а γ и R - выра-
жениями (3.19). Тогда момент времени t1 определяется из решения урав-
нения (3.20) как
T
(K - 1)π
(3.21)
t1 =
-
2
2ω
Доказательство леммы 1. Обозначим ξ = ω(T - t1) и ϕ = ωt1. То-
гда (3.20) принимает вид
sinϕ
(-1)K + (-1)K-1(-1)K-1
cos(γ - ξ)
sinγ
- ctg ξ =
(-1)K-1(-1)K-1sinϕsinγ sin(γ - ξ)
28
Рис. 3. Зависимость энергии E(t1) при фиксированных T : 1 - T = π + 0,1; 2 -
T = π + 1; 3 - T = π + 2; 4 - T = π + 3.
Перепишем последнее выражение, раскрыв ctg ξ и избавившись от знамена-
теля
cos ξ sin ϕ sin(γ - ξ) + sin ξ sin ϕ cos(γ - ξ) = (-1)K-1 sin ξ sin γ.
Сгруппировав слагаемые в левой части последнего равенства, получим
sin ϕ sin γ = (-1)K-1 sin ξ sin γ.
Поскольку из (3.19) видно, что sin γ = 0 при t1 = 0, то имеем равенство
sin ϕ = (-1)K-1 sin ξ,
из которого получаем, что для всех K ∈ Z выполнено
ϕ = ξ - (K - 1)π или ωt1 = ω(T - t1) - (K - 1)π,
откуда следует утверждение леммы 1. Лемма 1 доказана.
Следствие 1. Из леммы 1 и (3.17) следует, что когда t1 оптимально
и удовлетворяет (3.21),
(K - 1)π
T
(K - 1)π
(K - 1)π
ΔtL = T - t1 -
=T -
+
-
=
ω
2
2ω
ω
(3.22)
T
(K - 1)π
=
-
=t1.
2
2ω
29
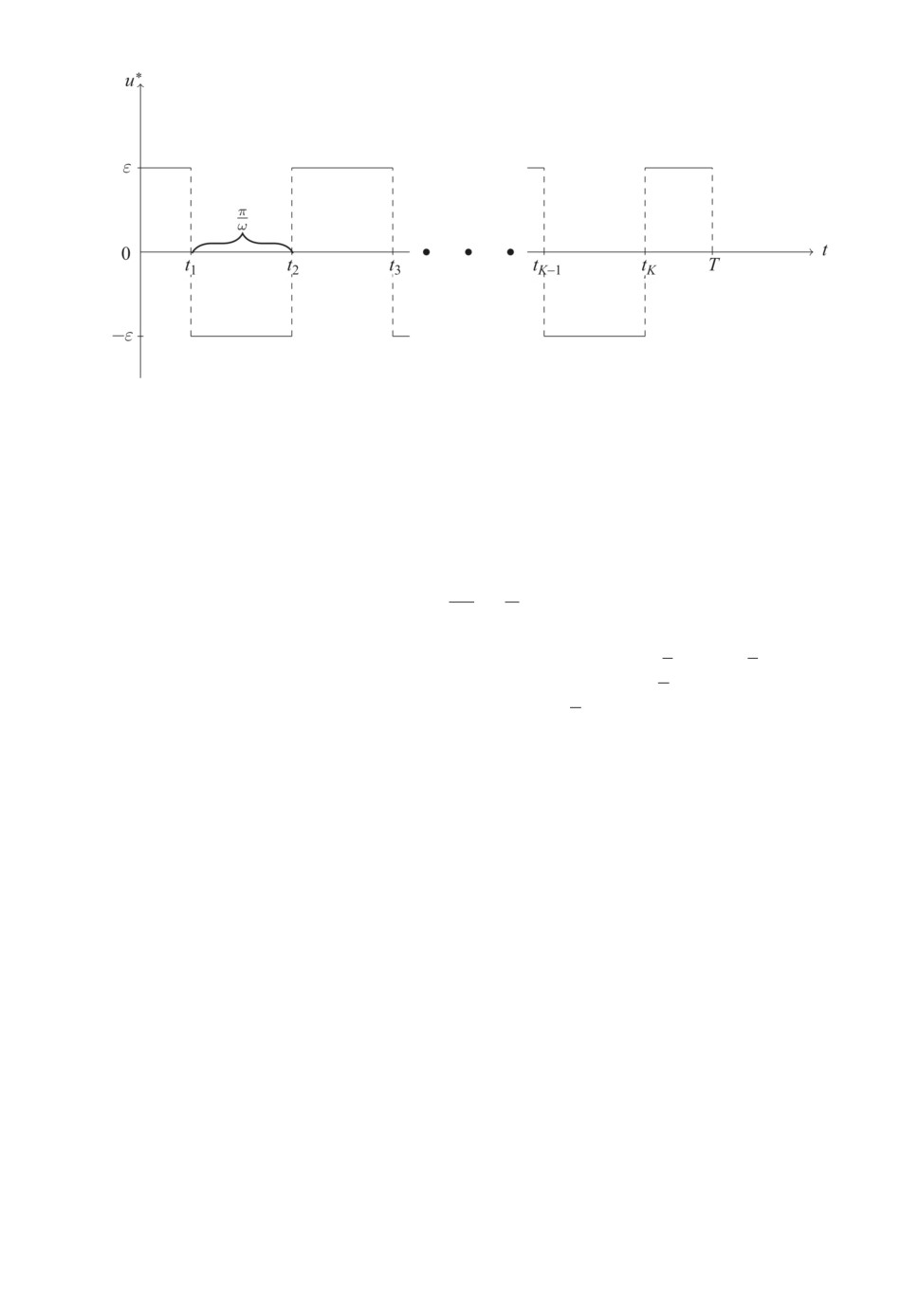
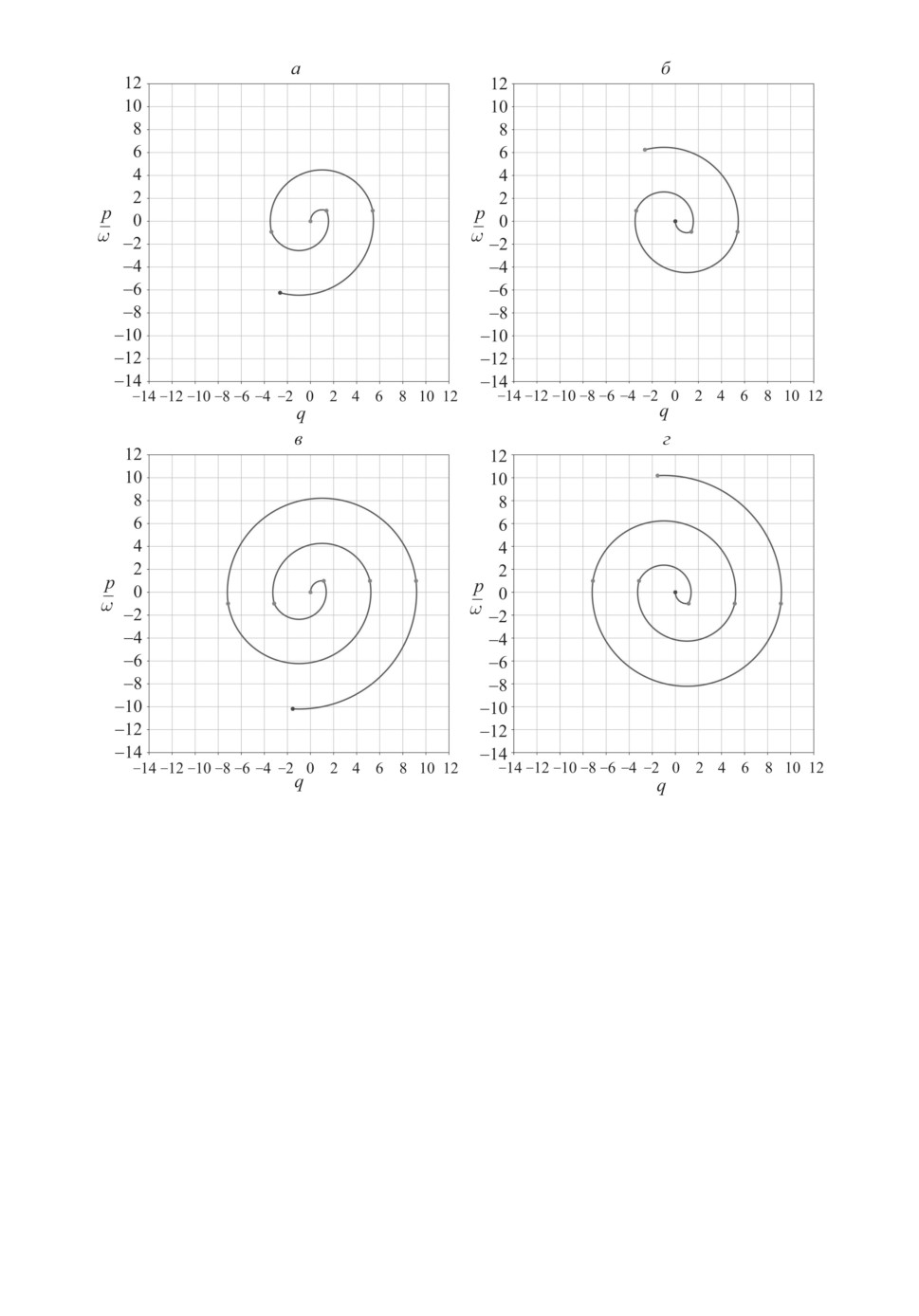
Рис. 4. Фазовые портреты для четырех пар значений (T, t1): a) T = π + 0,1;
б) T = π + 1; в) T = π + 2; г) T = π + 3.
Выражение (3.22) означает, что для максимальности энергии длительно-
сти первого и последнего интервалов управления должны быть равны.
Положим ω = 1 и рассмотрим различные значения T из отрезка [π, 2π].
С помощью моделирования методом перебора были найдены значения t1, при
которых значения E(T ) максимальны. Результат эксперимента представлен
на рис. 3.
Значения моментов первого переключения, максимизирующие энергию:
T = 3,24159265359, t1 = 1,62609871015;
T = 4,14159265359, t1 = 2,06811777699;
T = 5,14159265359, t1 = 2,5732824248;
T = 6,14159265359, t1 = 3,07844707261.
30
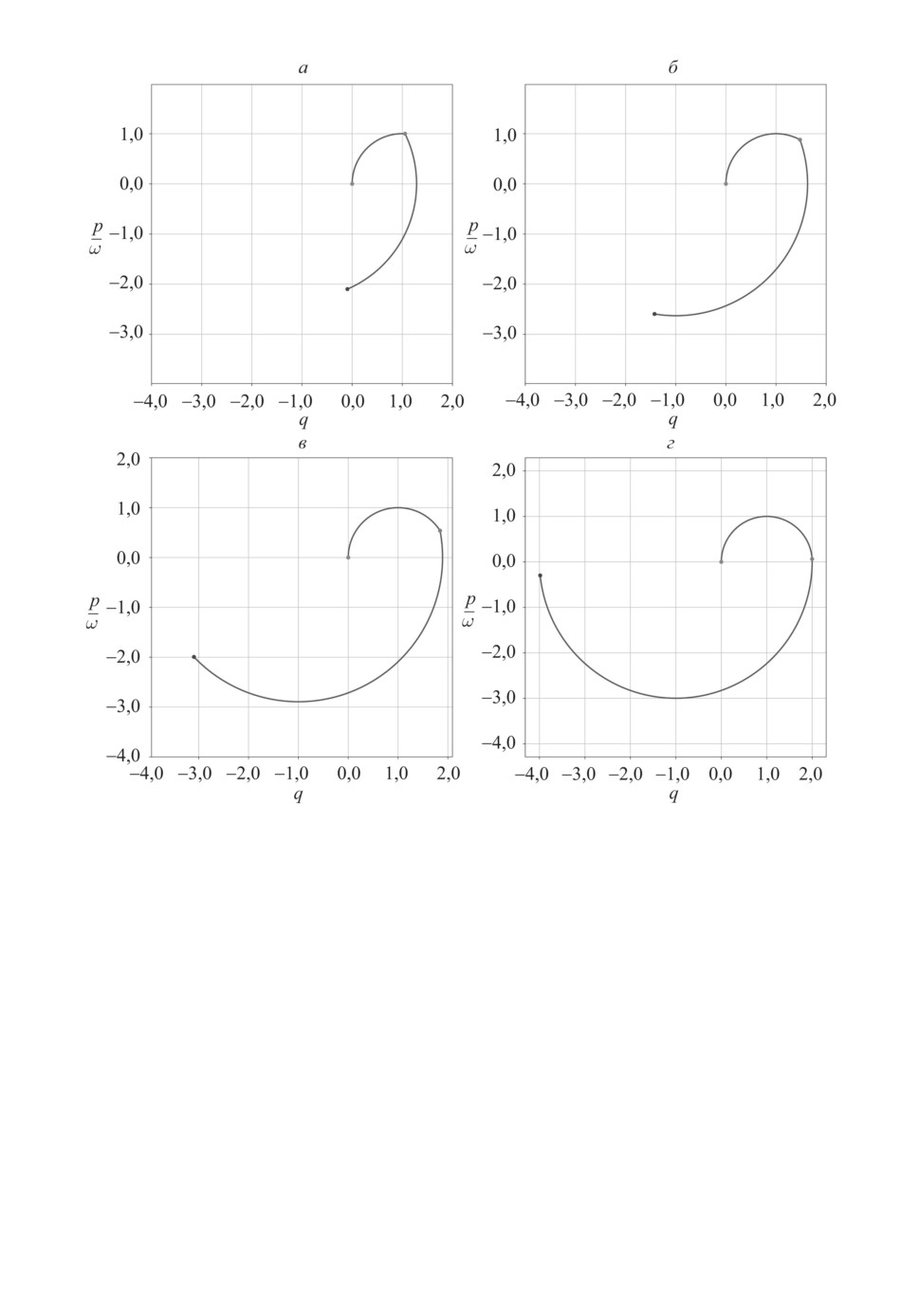
Рис. 5. Зависимость оптимального t1 от T .
Фазовые портреты для различных значений T представлены на рис. 4,
а зависимость t1(T ) - на рис. 5.
Численное решение уравнения (3.20) готовыми программными средствами
языка Python дает следующий результат:
T = 3,24159265359, t1 = 1,62079632679;
T = 4,14159265359, t1 = 2,07079632679;
T = 5,14159265359, t1 = 2,57079632679;
T = 6,14159265359, t1 = 3,07682946837.
T
Видно, что в случае одного переключения управления t1 =
. Этот сим-
2
метричный результат следует из формул аналитического решения с помощью
принципа максимума и следствия из леммы 1. Что касается других T , то по
π
лемме 1 решения периодичны с периодом
ω
После того как момент времени t1 определен, можно найти значение энер-
гии в финальный момент T .
Лемма 2. Максимальное значение энергии в момент времени T, дости-
жимое из состояния покоя осциллятора при ограниченном скалярном управ-
лении, удовлетворяющем ограничению |u| ≤ ε, равно:
2
2ε
E(T ) =
(K - cos ωt1)2 ,
ω2
где значение t1 получено в лемме 1.
31
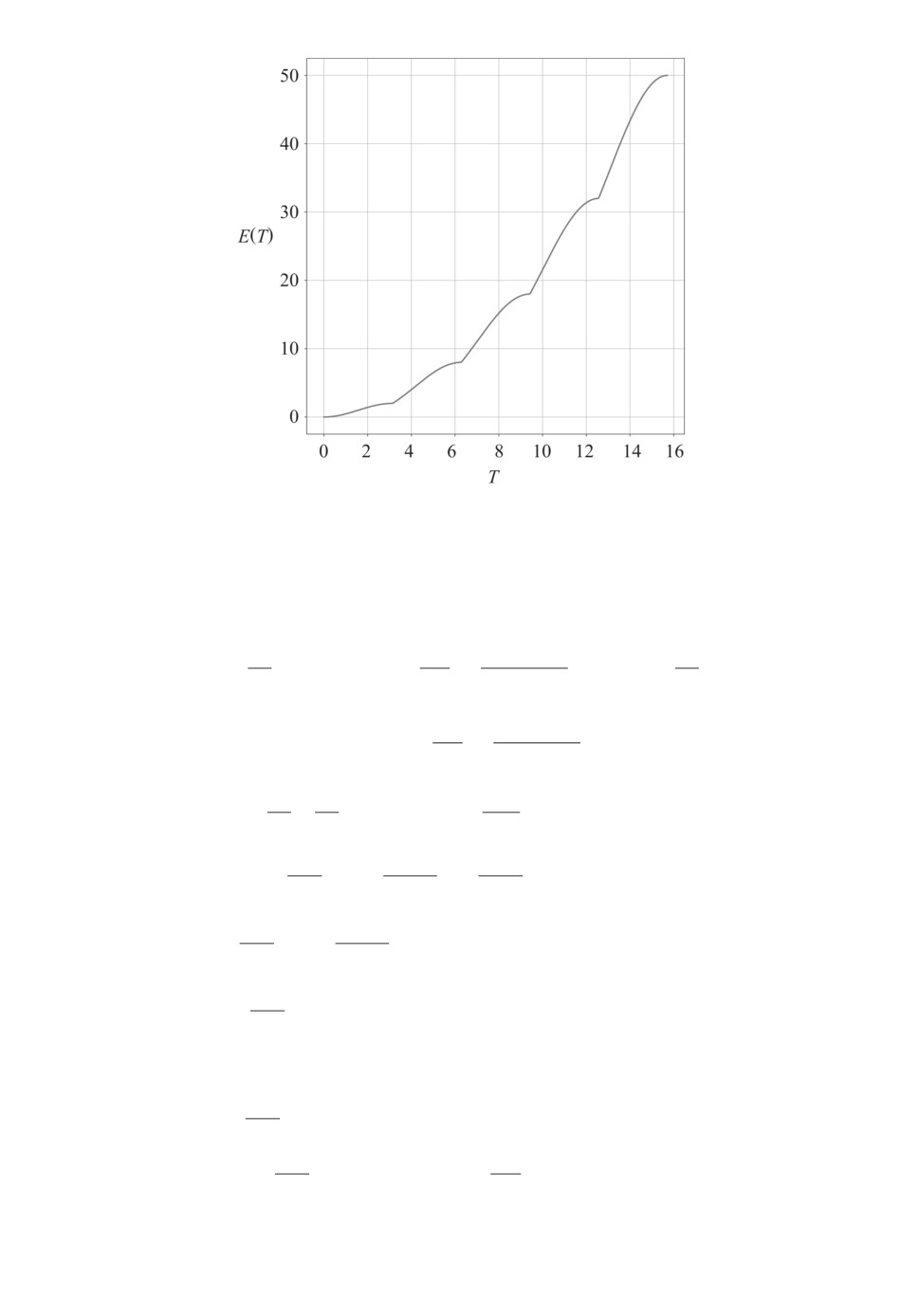
Рис. 6. Зависимость максимального значения E(T ).
Доказательство леммы 2. Выразим q(T) и p(T) через t1 и подста-
вим в выражение для энергии осциллятора. Справедлива цепочка равенств
((
(
)
)2
2
ω
ωT
(K - 1)π
ε
E(T ) =
R cos γ -
+
+ (-1)K
+
2
2
2
ω2
(
))
ωT
(K - 1)π
+ R2 sin2
γ-
+
=
2
2
)
2
ω
(ε2
2Rε
=
+ R2 + (-1)K
cos(γ - ωt1)
=
2
ω4
ω2
(
)
2
ε
sin2 ϕ
sin ϕ
=
1+
-2
cos(γ - ϕ)
=
2ω2
sin2 γ
sin γ
(
)
2
ε
sin2
ϕ
=
1+
- 2sin2 ϕ - 2sinϕcosϕctgγ
=
2ω2
sin2 γ
ε
2
(
)
=
cos2 ϕ + sin2 ϕ ctg2 γ - 2 sin ϕ cos ϕ ctg γ
2ω2
Подставим выражение для γ из (3.19) и получим:
2
(
)
ε
E(T ) =
cos2 ϕ + (2K - cos ϕ)2 - 2 cos ϕ (2K - cos ϕ)
=
2ω2
2
ε
=
(2K - 2 cos ϕ)2 =2ε2
(K - cos ωt1)2 .
2ω2
ω2
Лемма 2 доказана.
32
Проиллюстрируем полученную зависимость графиком, представленным
на рис. 6. Из рис. 6 видно, что рост энергии E(T ) с возрастанием значений T
существенно нелинейный.
Поскольку получено значение энергии осциллятора при K ≥ 1, то необхо-
димо сравнить значение энергии при K = 1 с значением энергии при K = 0
и фиксированном T < π. Эти значения равны:
(
)2
2
ε
2ε2
ωT
EK=0 =
(1 - cos ωT ), EK=1 =
1 - cos
ω2
ω2
2
Сравнивая EK=0 и EK=1, получаем, что EK=0 ≥ EK=1 при всех ωT ∈ [0, π].
Лемма 3. Значение энергии в момент времени T, достижимое из со-
стояния покоя осциллятора при ограниченном скалярном управлении, удо-
влетворяющем (3.9), при T =nπω , n ∈ N, не зависит от t1 и равно:
2
2ε2K
E(T ) =
ω2
Доказательство леммы 3.
[(
(
(
)
)
)2
2
ω
(K - 1) π
ε
E(T ) =
R cos
-ω T - t1 -
+γ
+ (-1)K
+
2
ω
ω2
]
(
(
(
)
))2
(K - 1) π
+R2
sin
-ω T - t1 -
+γ
ω
Заметим, что если T =nπω , то K = n. Поэтому выражение принимает вид
2
[(
)2
ω
ε
E(T ) =
R cos (-ω (-t1) + π + γ) + (-1)K
+
2
ω2
]
+R2 (sin (-ω (-t1) + π + γ))2
=
]
2
[(
)2
ω
ε
=
-R cos (ωt1 + γ) + (-1)K
+ R2 (sin(ωt1
+ γ))2
=
2
ω2
)
2
ω
(ε2
2Rε
=
+ R2 - (-1)K
cos (ωt1 + γ)
2
ω4
ω2
Используя (3.19) и сделав замену ϕ = ωt1, получаем:
(
)
2
ε
sin2
ϕ
E(T ) =
1+
- 2sin2 ϕ + 2sinϕcosϕctgγ
=
2ω2
sin2 γ
2
ε
(
(
)
)
=
1 + sin2 ϕ
1 + ctg2 γ
- 2sin2 ϕ + 2sinϕcosϕctgγ
=
2ω2
2
(
)
ε
2ε2K2
=
cos2 ϕ + (2K - cos ϕ)2 + 2 cos ϕ (2K - cos ϕ)
=
2ω2
ω2
Лемма 3 доказана.
33
Выражение для энергии в лемме 3 совпадает с асимптотической формулой
для энергии осциллятора в задаче гашения колебаний на больших временах,
приведенной в [8].
4. Сравнение с задачей быстродействия
Напомним задачу быстродействия для одного осциллятора. Для системы,
описываемой (2.1) с ограничением на управление вида |u| ≤ ε и краевыми
условиями
⎧
⎪
q(0) = a,
⎨
p(0) = b,
(4.1)
⎪
q(T ) = 0,
⎩
p(T ) = 0,
найти оптимальное управление u(t), минимизирующее критерий
∫T
(4.2)
J =
dt -→ min .
0
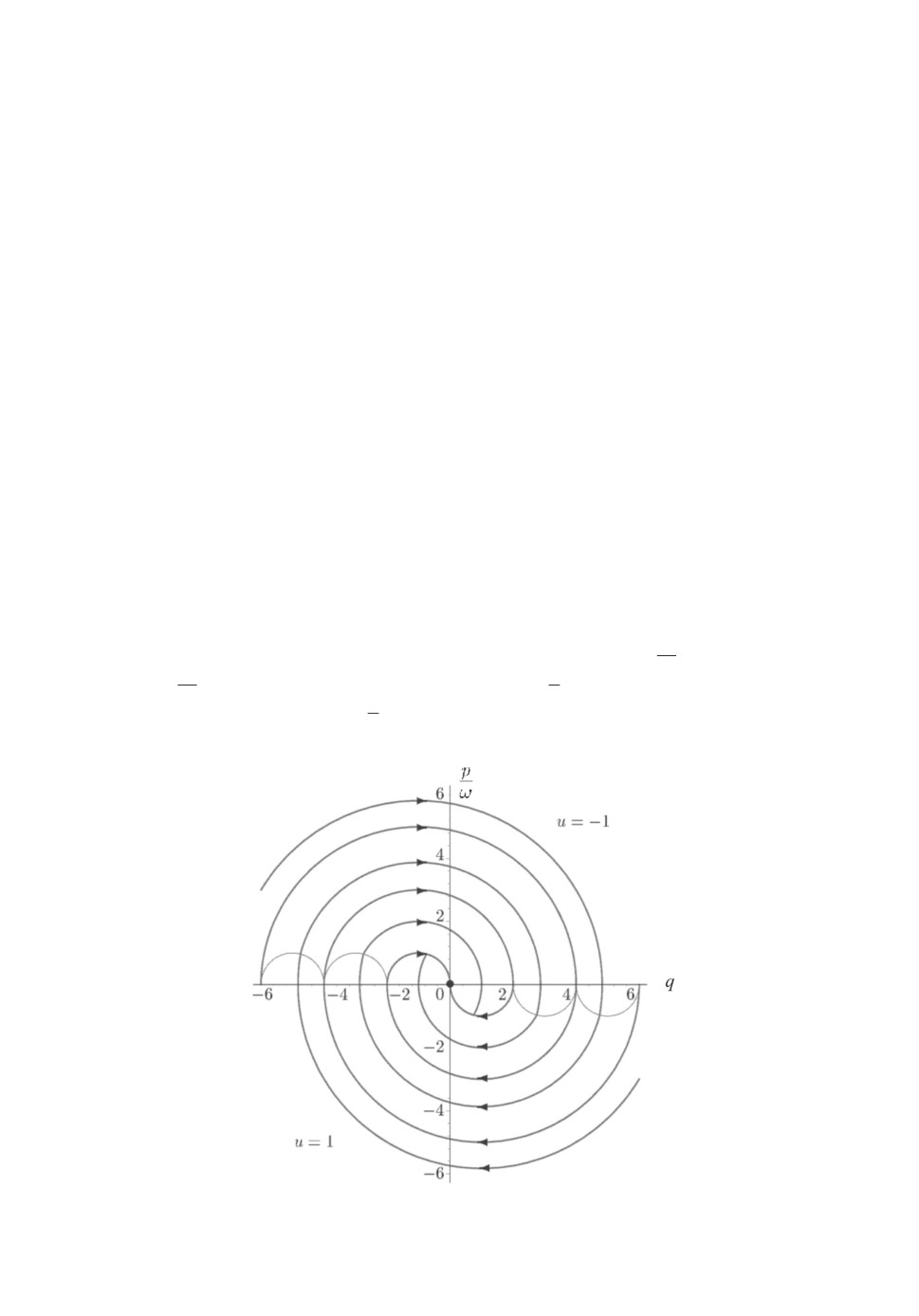
Как показал Болтянский в [1], решением этой задачи является оптималь-
ное кусочно-непрерывное управление, переключающееся в фазовых точках
пересечения дуг фазовой траектории и полудуг радиусаεω2 , проведенных в
точках ±kεω2 , k = 2n - 1, n ∈ N, через каждыеπω секунд. Фазовая плоскость
(
)
построена в координатах
q,pω
(см. рис. 7).
Рис. 7. Фазовые траектории в задаче быстродействия.
34
В [4] приведено аналитическое решение схожей задачи с частными началь-
ными условиями с указанием полного времени и времени первого переклю-
чения. Они полностью определяют решение. Следуя той же логике и гра-
фическому представлению решения, приведенному в [1, 3], можно выписать
аналитическое значение критерия в задаче быстродействия, которое в явном
виде приводится впервые, а именно:
⎧
(
)
⎪
π
1
φ
⎪
T∗ =
K-
-
+ ΔtL,
⎪
ω
2
ω
⎪
⎪
1
(Rω2 cos(φ + γ0))
⎪
⎪
ΔtL =
arcsin
,
⎪
ω
ε
⎪
⎨
(
)
ε2
(4K2 - 1) + ω2R2
(4.3)
φ = arcsinω2
-γ0,
⎪
4KεR
⎪
⎪
⎪
√(
)2
⎪
ε
(b)2
⎪
R= a+
+
,
⎪
ω2
ω
⎪
⎪
⎩ γ0 = arctgbω
,
ω2a + ε
где K - число переключений управления, а T∗ - величина оптимального пол-
ного времени быстродействия. K может принимать одно из значений:
]
}
{[ω2R
[ω2R]
[ω2R]
K =
- 1;
;
+1
2ε
2ε
2ε
Здесь квадратные скобки обозначают целую часть числа, а решение приве-
дено для начального положения, которому соответствует u(0) = -ε.
Решение задачи максимизации энергии осциллятора за фиксированное
время дает оптимальные значения обобщенных координат осциллятора в мо-
мент времени T . Если теперь выбрать любую другую точку на окружно-
сти, соответствующей максимальному значению энергии, то очевидно, что
значение критерия T∗, полученного из решения задачи быстродействия, бу-
дет больше T - фиксированного времени в исходной задаче. Однако также
очевидно, что при перемене знака скорости существует оптимальное реше-
ние задачи быстродействия (те же самые моменты переключения управления
только в обратном времени и уровни переключения на фазовой плоскости),
дающее решение этой задачи с T∗ = T .
На рис. 8,а и 8,в показаны фазовые портреты для задачи максимизации
энергии, на рис. 8,б и 8,г - для соответствующей задачи быстродействия.
Начальное значение фазовых координат для задачи быстродействия выбра-
но a = q(T ), b = -p(T ) равным оптимальным значениям, полученным при
решении задачи максимизации энергии.
Множество точек (a, b) фазовой плоскости осциллятора с равной энерги-
ей представляет собой окружность ω2a2 + b2 = const, являющуюся ограни-
ченным замкнутым множеством. Значение T∗ как функция начальных усло-
вий (a, b) достигает на этом множестве своих верхней и нижней граней. Ниж-
няя грань Tl, как сказано ранее, есть Tl = T . Верхняя грань Th может быть
35
Рис. 8. Разгон маятника до максимальной энергии и приведение его в состоя-
ние покоя из точки с полученной энергией за минимальное время.
найдена как решение задачи T∗ → max(a,b) при условии ω2a2 + b2 = const, а
численно - например, перебором по всем точкам окружности соответствую-
щей энергии. Приведем значения Th для некоторых значений Tl.
Tl = 9,92477796077, Th = 10,5273991806;
Tl = 4,44159265359, Th = 5,1503994477;
Tl = 17,407963268, Th = 17,8359447879.
5. Заключение
В статье исследована и решена задача управления осциллятором по крите-
рию максимизации его энергии в заданный фиксированный момент времени.
Аналитически получены вид оптимального управления и значения времен пе-
реключения управления, а также формулы конечного оптимального значения
36
энергии как функции времени T , отведенного на решение задачи. Разработа-
ны программные модули на языке Python для решения задачи оптимального
управления при максимизации энергии, задачи быстродействия и для экспе-
риментальной проверки лемм 1, 2 и 3. Полученное решение расширяет набор
классических решений для задачи оптимального ограниченного скалярного
управления одиночным осциллятором, дает понимание структуры получен-
ных законов управления и дополняет решение задачи быстродействия.
В будущем планируется применить разработанный подход для решения
задачи максимизации энергии системы осцилляторов.
СПИСОК ЛИТЕРАТУРЫ
1. Болтянский В.Г. Математические методы оптимального управления. М.: Наука,
1969.
2. Гамкрелидзе Р.В. Открытие Принципа Максимума Понтрягина (ПМП). 2013.
9-10 апреля. Докл. в Тулонском университете. Франция.
3. Аграчев А.А., Сачков Ю.Л. Геометрическая теория управления. М.: Физматлит,
2005.
4. Галяев А.А. Задача оптимального управления осциллятором с целью обнуления
его энергии при ограничении на управляющее воздействие // АиТ. 2009. № 3.
C. 24-33.
Galyaev A.A. Problem of Optimal Oscillator Control for Nulling its Energy under
Bounded Control Action // Autom. Remote Control. 2009. V. 70. No. 3. P. 366-374.
5. Черноусько Ф.Л. Управление колебаниями. М.: Наука, 1980.
6. Галяев А.А. Скалярное управление группой несинхронных осцилляторов //
АиТ. 2016. № 9. С. 3-18.
Galyaev A.A. Scalar Control of a Group of Free-running Oscillators // Autom.
Remote Control. 2016. V. 77. No. 9. P. 1511-1523.
7. Fedorov A., Ovseevich A.I. Asymptotic Control Theory for a System of Linear
Oscillators // Moscow Math. J. 16. 2016. P. 561-598.
8. Ovseevich A.I. Complexity of the Minimum-time Damping of a Physical Pendulum //
SIAM J. Control Optim. 2014. V. 52. No. 1. P. 82-96.
Статья представлена к публикации членом редколлегии Е.Я. Рубиновичем.
Поступила в редакцию 18.01.2018
После доработки 25.05.2018
Принята к публикации 08.11.2018
37