Автоматика и телемеханика, № 10, 2019
© 2019 г. Д.В. БАЛАНДИН, д-р физ.-мат. наук (dbalandin@yandex.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского),
Р.С. БИРЮКОВ, канд. физ.-мат. наук (biryukovrs@gmail.com),
М.М. КОГАН, д-р физ.-мат. наук (mkogan@nngasu.ru)
(Нижегородский государственный архитектурно-строительный университет)
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ МАКСИМАЛЬНЫМИ
УКЛОНЕНИЯМИ ВЫХОДОВ ЛИНЕЙНОЙ НЕСТАЦИОНАРНОЙ
СИСТЕМЫ НА КОНЕЧНОМ ИНТЕРВАЛЕ ВРЕМЕНИ1
Вводится понятие максимального уклонения выхода линейной неста-
ционарной системы на конечном интервале времени как максимального
значения максимальной по времени евклидовой нормы выхода при усло-
вии, что сумма квадрата энергии внешнего возмущения и квадратич-
ной формы начального состояния системы равна единице. Максималь-
ное уклонение характеризуется в терминах решений дифференциальных
матричных уравнений или неравенств. Введено модифицированное поня-
тие ограниченности системы на конечном интервале при внешнем и на-
чальном возмущениях и установлена его связь с понятием максимального
уклонения. Получены необходимые и достаточные условия ограниченно-
сти системы на конечном интервале. Показано, что синтез оптимальных
управлений, в том числе и многокритериальных, минимизирующих мак-
симальные уклонения нескольких выходов, а также управлений, обеспе-
чивающих ограниченность системы, осуществляется в терминах линей-
ных матричных неравенств.
Ключевые слова: максимальное уклонение выхода, линейная нестацио-
нарная система, обобщенная H2 норма, линейные матричные неравенства.
DOI: 10.1134/S0005231019100027
1. Введение
Одно из обязательных требований к системе управления заключается в
том, чтобы значения целевых переменных объекта и системы управления на-
ходились в определенных границах по отношению к их номинальным значе-
ниям несмотря на внешние возмущения и ненулевые начальные условия. Чем
уже эти границы, т.е. чем меньше максимальные отклонения, тем эффектив-
нее система управления.
Проблема больших отклонений, вызванных ненулевыми начальными усло-
виями, или, как ее иногда называют, проблема всплеска была рассмотрена
А.А. Фельдбаумом [1], а затем Р.Н. Измайловым [2]. В [3] была поставлена и
решена классическая задача Б.В. Булгакова о накоплении ограниченных воз-
мущений, и в [4] приведено ее обобщение на случай нескольких переменных.
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проекты №№ 18-41-520002, 19-01-00289).
37
В [5] находится наихудшее ограниченное скалярное возмущение, доставляю-
щее наибольшее значение отклонению выхода системы в конечный момент
времени. Различные способы вычисления матричной экспоненты и наличие
у ее нормы характерных максимумов демонстрируются в [6]. Верхние оценки
максимальных отклонений при всплеске были выведены в терминах решений
линейных матричных неравенств в [7, 8]. В последнее время активно занима-
ются проблемой всплеска в лаборатории им. Я.З. Цыпкина ИПУ РАН [9-11].
Понятие обобщенной H2 нормы, отвечающее максимальному отклонению при
внешнем возмущении с известной энергией (L2 нормой) и нулевых начальных
условиях, было введено D.A. Wilson [12, 13]. В [14] получены оценки обобщен-
ной H2 нормы для непрерывно-дискретных систем.
Приведенные выше исследования в большей своей части касались анализа
максимальных отклонений и всплесков. Что касается задачи синтеза управ-
ления, то в [15] для непрерывных систем и в [16] для дискретных систем
был получен оптимальный регулятор по выходу на бесконечном горизонте,
реализация которого требует решений уравнения Риккати и задачи выпук-
лого программирования. В [17] для непрерывных систем и в [18] для дис-
кретных систем были синтезированы законы управления, минимизирующие
верхние оценки всплесков, вызванных неизвестным начальным возмущени-
ем, а в [19, 20] были получены законы управления, минимизирующие мак-
симальное отклонение выхода непрерывной системы при нулевом начальном
состоянии и внешнем возмущении с заданной энергией на бесконечном гори-
зонте. Заметим, что исследования максимальных отклонений при внешнем
ограниченном возмущении, т.е. из класса l∞, развивающие в определенном
смысле задачу Б.В. Булгакова, проводились в рамках теории l1-оптимального
управления в [21, 22] и в других работах, но здесь далее эта тема не рассмат-
ривается.
Особую трудность представляют задачи управления максимальными от-
клонениями при неопределенных начальных условиях и внешнем возмуще-
нии на конечном временном интервале. В рамках концепции так называемой
практической устойчивости, которая в западных публикациях получила на-
звание устойчивости на конечном интервале (“finite-time stability”), в [23, 24]
были получены условия, при выполнении которых состояние линейной неста-
ционарной системы на заданном конечном интервале при любом начальном
состоянии из некоторой ограниченной области в отсутствие внешних возму-
щений не покидает в каждый момент времени заданные, например, эллипсо-
идальные области. Эти условия выражаются в терминах решений матричных
дифференциальных уравнений или неравенств Ляпунова, численная дискре-
тизация которых позволяет синтезировать нестационарные обратные связи,
обеспечивающие указанную устойчивость замкнутой системы. В [25] в рам-
ках так называемой концепции устойчивости по входу и выходу на конечном
интервале (“input-output finite-time stability”) были синтезированы обратные
связи, при которых выход линейной нестационарной системы с нулевыми на-
чальными условиями находится в заданных пределах на конечном интерва-
ле при любых внешних возмущениях из определенного класса. Что касается
максимальных отклонений на конечном интервале при наличии обоих фак-
торов, т.е. при неопределенных начальных условиях и внешнем возмущении,
38
то в [26] приведены достаточные условия ограниченности системы на конеч-
ном интервале при ненулевых начальных условиях (“finite-time boundedness
with non-zero initial state”). В полной мере проблема оптимального управ-
ления, минимизирующего максимальные отклонения на конечном интервале
при наличии неопределенных начальных условий и внешнего возмущения, не
решена до сих пор.
В данной статье предпринимается попытка перейти от оценки максималь-
ного отклонения выхода линейной нестационарной системы на конечном ин-
тервале к точному значению так называемого максимального уклонения вы-
хода при внешнем и начальном возмущениях, понимаемому как максималь-
ное значение максимальной по времени евклидовой нормы выхода при усло-
вии, что сумма квадрата энергии внешнего возмущения и квадратичной фор-
мы начального состояния системы равна единице. Для этого здесь применя-
ется вариационный подход, подобно тому, как это делалось в [27, 28] в за-
даче H∞ оптимального управления при ненулевых начальных условиях для
линейного нестационарного объекта на конечном горизонте и в [29, 30] для
линейного стационарного объекта на бесконечном горизонте. Максимальные
уклонения выхода при внешнем возмущении и нулевом начальном состоя-
нии, а также при неопределенном начальном состоянии в отсутствие внешне-
го возмущения тоже определяются соответствующим образом. Максималь-
ные уклонения характеризуются в терминах решений матричного диффе-
ренциального уравнения, а затем в терминах решений линейных матричных
неравенств. Показано, что условия устойчивости по входу и выходу и усло-
вия ограниченности линейной нестационарной системы на конечном интер-
вале могут быть сформулированы в терминах соответствующих максималь-
ных уклонений. Введено модифицированное понятие ограниченности систе-
мы на конечном интервале при внешнем и начальном возмущениях, для ко-
торого получены необходимые и достаточные условия. Синтезированы оп-
тимальные законы управления, минимизирующие максимальные уклонения,
в том числе многокритериальные, и законы управления, обеспечивающие
ограниченность системы на конечном интервале при внешнем и начальном
возмущениях.
2. Максимальное уклонение при внешнем и
начальном возмущениях
Рассмотрим динамический объект, описываемый неавтономной системой
линейных дифференциальных уравнений:
x = A(t)x + B(t)v, x(t0) = x0,
(2.1)
z = C(t)x,
где x ∈ Rnx - состояние объекта, v ∈ L2 - возмущение, действующее на объ-
ект, принадлежащее классу интегрируемых с квадратом на отрезке [t0, T0]
функций времени, z ∈ Rnz - выход объекта. Под максимальным уклонением
выхода системы (2.1) при начальном и внешнем возмущениях на конечном
39
интервале [t0, T0] будем понимать величину
sup
|z(t)|
t∈[t0,T0]
(2.2)
J0,v
= sup
(
)1/2 ,
x0, v∈L2
xT0R-1x0 + ∥v∥2
[t0,T0]
где | · | обозначает евклидову норму вектора, а
t1
∫
∥v∥2[t
=
|v(t)|2dt.
0,t1]
t0
Весовая матрица R = RT > 0 отражает относительную важность учета
неопределенностей начальных условий и внешнего возмущения: чем “боль-
ше” R, тем больший вес придается неопределенности в начальных усло-
виях. Величину (2.2) можно рассматривать как индуцированную норму ли-
нейного оператора, порожденного системой (2.1) и отображающего пару
(x0, v(t)) ∈ Rnx × L2[t0, T0] в z(t) ∈ L∞[t0, T0].
Максимальное уклонение (2.2) может быть записано в виде
|z(T )|
(2.3)
J0,v = sup
sup
(
)1/2 .
T ∈[t0,T0] x0, v∈L2 xT0R-1x0 + ∥v∥2
[t0,T]
Заметим, что в (2.3) величина |z(T )| для каждого T зависит от внешнего воз-
мущения на отрезке [t0, T ], поэтому точная верхняя грань по возмущениям
берется, фактически, только по всем возмущениям на этом отрезке. Это ска-
жется на том, что, как будет показано далее, наихудшие начальное состояние
и возмущение, максимизирующие этот функционал, определяются неодно-
значно. Кроме того, ясно, что в силу линейности системы и однородности
функционала наихудшие начальное состояние и возмущение определяются с
точностью до постоянного множителя.
В частном случае, когда начальные условия в системе (2.1) нулевые, мак-
симальным уклонением выхода при внешнем возмущении назовем величину
sup
|z(t)|
t∈[t0,T0]
|z(T )|
(2.4)
Jv
= sup
= sup sup
v∈L2
∥v∥[t0,T0]
T ∈[t0,T0] v∈L2 ∥v∥[t0,T ]
По аналогии со случаем стационарной системы и бесконечного горизонта ве-
личина Jv может быть названа обобщенной H2 нормой.
В другом частном случае, когда внешнее возмущение отсутствует, макси-
мальное уклонение выхода при начальном возмущении определим как
sup
|z(t)|
t∈[t0,T0]
|z(T )|
(2.5)
J0
= sup
= sup sup
x0=0 (x0R-1x0)1/2
T ∈[t0,T0] x0=0 (x0R-1x0)1/2
40
Теорема 2.1. Для системы (2.1) имеют место следующие утвержде-
ния:
1. Максимальное уклонение выхода при начальном и внешнем возмуще-
ниях на конечном отрезке [t0,T0] определяется формулой
[
]
(2.6)
J0,v = sup λ1/2max
C(t)Y0,v(t)CT(t)
,
t∈[t0,T0]
где λmax(·) - максимальное собственное значение соответствующей мат-
рицы, а Y0,v(t) есть решение дифференциального матричного уравнения
Y
(2.7)
= A(t)Y + Y AT(t) + B(t)BT
(t)
с начальным условием Y (t0) = R. Максимальное уклонение J0 при начальном
возмущении определяется как
[
]
(2.8)
J0 = sup λ1/2max
C(t)Y0(t)CT(t)
,
t∈[t0,T0]
где Y0(t) - решение уравнения (2.7), B(t) ≡ 0 с начальным условием Y (t0) =
= R. Максимальное уклонение Jv при внешнем возмущении определяется
как
[
]
(2.9)
Jv = sup λ1/2max
C(t)Yv(t)CT(t)
,
t∈[t0,T0]
где Yv(t) - решение уравнения (2.7) с начальным условием Y (t0) = 0;
2. Наихудшие внешнее возмущение v∗(t) и вектор начальных условий x∗0
по отношению к максимальному уклонению (2.2) на конечном отрезке [t0,T0]
определяются так:
(2.10)
v∗(t) = gBT(t)Y-1(t)s(t), x∗0 = gs(t0
),
где s(t) - решение задачи Коши для системы
[
]
(
)
(2.11)
x=
A(t) + B(t)BT(t)Y-1(t)
x, x(T∗) = emax
Y (T∗)CT(T∗)C(T∗)
,
Y (t) - решение уравнения (2.7), T∗ - момент времени, в который
[
]
[
]
λmax
C(T∗)Y (T∗)CT(T∗)
= sup λmax
C(t)Y (t)CT(t)
,
t∈[t0,T0]
emax(·) - нормированный собственный вектор матрицы, отвечающий ее
максимальному собственному значению,
⎛
⎞-1/2
T∗
∫
(2.12) g =⎝sT(t0)R-1s(t0) + sT(τ)Y-1(τ)B(τ)BT(τ)Y-1(τ)s(τ)dτ ⎠
t0
41
Замечание 1. Из доказательства теоремы 2.1, приведенного в Приложе-
нии, следует, что наихудшее возмущение по отношению к функционалу J0,v
определяется неоднозначно: на отрезке [t0, T∗] оно совпадает с наихудшим воз-
мущением v∗(t), t ∈ [t0, T∗], по отношению к вспомогательному функционалу
J (v) = |z(T∗)|2, а на отрезке [T∗, T0] оно не влияет на максимальное укло-
нение выхода и, следовательно, может быть продолжено произвольным об-
разом. Действительно, пусть v∗(t), t ∈ [t0, T0], - произвольное возмущение,
совпадающее с v∗(t) на интервале [t0, T∗]. Тогда оно также будет наихудшим
по отношению к функционалу J0,v, так как
|z(T )|
|z(T∗)|
J0,v ≥ sup
≥
=
T ∈[t0,T0] (x0TR-1x0 + ∥v∗∥2[t
)1/2
0,T]
(x∗T0R-1x∗0 + ∥v∗∥2[t0,T∗])1/2
|z(T∗)|
=
=J0,v.
(x∗T0R-1x∗0 + ∥v∗∥2[t0,T∗])1/2
При этом не исключается возможность того, что при разных наихудших воз-
мущениях момент T∗ может быть разным, но в любом случае значение мак-
симального уклонения будет одно и то же. Ясно, что “большие” значения
возмущения на отрезке [T∗, T0] вызовут “большие” значения выхода, однако
максимальное уклонение выхода, понимаемое как отношение (2.2), не пре-
высит величину |z(T∗)|, которая совпадает с максимальным уклонением, так
как
∫T∗
x∗T0R-1x∗0 +
|v∗(t)|2 dt = 1.
t0
Один из возможных способов определения наихудшего внешнего возмущения
на всем отрезке [t0, T0] задается формулой (2.10), другой - определить v∗(t),
t ∈ [t0,T∗], как в (2.10) и v∗(t) = 0, t ∈ [T∗,T0].
Замечание 2. Из доказательства теоремы 2.1 следует, что решение Y (t)
уравнения (2.7) при Y (t0) = 0 монотонно не убывает по времени. Отсюда сле-
дует, что для стационарной системы функция λm
ax[CY (t)CT] также монотон-
но не убывает. Это означает, что
[
]
Jv = λ1/2max
CYv(T0)CT
,
т.е. максимум по T из максимальных по всем допустимым возмущениям зна-
чений отношения евклидовой нормы выхода на конце интервала [t0, T ] к
L2 норме возмущения на этом интервале для стационарной системы при ну-
левых начальных условиях достигается на конце интервала, т.е. при T = T0
(см. (2.4)). Стоит добавить, что при неограниченном увеличении T0 макси-
мальное уклонение Jv выхода устойчивой стационарной системы стремится
(
)
к величине λm
ax
CY∗CT
, где матрица Y∗, называемая граммианом управ-
ляемости, является решением уравнения
AY + Y AT + BBT = 0.
42
В этом случае можно говорить о максимальном уклонении выхода на беско-
нечном горизонте, которое совпадает с одним из вариантов обобщенной H2
нормы стационарной системы, введенной в [12].
Замечание 3. Доказательство теоремы 2.1 показывает, что по траекто-
рии системы выполняется равенство
(2.13)
xT(t)Y-10,v(t)x(t) = xT0R-1x0 + ∥v∥2[t
- ∥v - BTY -10,vx∥22.
0,t]
Это наводит на мысль о том, что множество достижимости системы (2.1)
в момент времени t, т.е. множество состояний, в которые может попасть
вектор ее решений x(t) при всевозможных начальных состояниях и возму-
щениях, удовлетворяющих совместному ограничению xT0R-1x0 + ∥v∥2[t0,t]≤1,
представляет собою эллипсоид E(Y0,v(t)) = {x : xTY-10,v(t)x ≤ 1}, матрица ко-
торого является решением уравнения (2.7). Действительно, из (2.13) следует,
что для всех указанных начальных состояний и возмущений выполняется
неравенство xT(t)Y-10,v(t)x(t) ≤ 1, т.е. x(t) ∈ E(Y0,v(t)). Как нетрудно видеть
из (2.13), каждая точка этого эллипсоида будет конечной для решения си-
стемы при возмущении v(σ) = BTY-10,v(σ)x(σ), σ ∈ [t0, t] и некотором началь-
ном состоянии x0 ∈ E(R). Множеством достижимости системы (2.1) в момент
времени t в отсутствие возмущений при начальных состояниях из эллипсои-
да E(R) является эллипсоид E(Y0(t)), а множеством достижимости при нуле-
вых начальных условиях и возмущениях, для которых ∥v∥2[t0,t]≤1,является
эллипсоид E(Yv(t)). К этому добавим, что Y0,v(t) = Y0(t) + Yv(t) в силу того,
что решение неоднородного дифференциального уравнения (2.7) суть сумма
соответствующего решения однородного уравнения и решения неоднородного
уравнения с нулевыми начальными условиями.
3. Устойчивость и ограниченность системы
на конечном интервале времени
Напомним, что согласно [26] система называется ограниченной на конеч-
ном интервале [t0, T0] при ненулевых начальных условиях и внешнем воз-
мущении из класса L2 при заданных положительных параметрах c1, c2, d
(c1 < c2) и положительно определенной матрице Γ(t), если
(3.1) xT(t0)Γ(t0)x(t0) ≤ c1 ⇒ xT(t)Γ(t)x(t) < c2
∀t ∈ [t0,T0],
∀v : ∥v∥2[t
≤ d.
0,T0]
Если для максимального уклонения выхода z = Γ1/2(t)x при выборе
R = Γ-1(t0) справедливо неравенство
sup
xT(t)Γ(t)x(t)
t∈[t0,T0]
c2
(3.2)
J20,v
= sup
<
,
x0, v∈L2 x0Γ(t0)x0 + ∥v∥2[t
c1 + d
0,T0]
то система ограничена для заданных c1, c2, d и Γ(t). С учетом теоремы 2.1
это условие совпадает с достаточным условием ограниченности системы
43
на конечном интервале, полученным в [26]. Неравенство (3.2) не являет-
ся необходимым условием ограниченности системы, так как из неравенства
J20,v ≥ c2/(c1 + d) при xT(t0)Γ(t0)x(t0) ≤ c1 и ∥v∥2[t0,T0]≤dнеследует,вообще
говоря, неравенство xT(t)Γ(t)x(t) ≥ c2, т.е. система может оставаться ограни-
ченной в смысле определения (3.1).
Модифицируем определение (3.1) и дадим следующее определение ограни-
ченности системы на конечном интервале времени при заданных положитель-
ных параметрах s1, s2 (s1 < s2) и положительно определенной матрице Γ(t):
(3.3)
xT(t0)Γ(t0)x(t0) + ∥v∥22 ≤ s1 ⇒ xT(t)Γ(t)x(t) < s2
∀t ∈ [t0,T0
].
Необходимые и достаточные условия ограниченности системы на конечном
интервалы в смысле определения (3.3) формулируются следующим образом.
Теорема 3.1. Система (2.1) является ограниченной на конечном ин-
тервале [t0,T0] при заданных s1, s2 (s1 < s2) и Γ(t) в смысле определения (3.3)
тогда и только тогда, когда максимальное уклонение выхода z = Γ1/2(t)x
при R = Γ-1(t0) удовлетворяет неравенству J20,v < s2/s1 или, другими сло-
вами, когда выполнено условие
[
]
(3.4)
λmax Γ1/2(t)Y (t)Γ1/2(t) < s2/s1
∀t ∈ [t0,T0
],
где Y (t) - решение уравнения (2.7) при Y (t0) = Γ-1(t0).
Замечание 4. Из теоремы 3.1 следует, что необходимые и достаточные
условия устойчивости на конечном интервале при заданных c1, c2 и Γ(t),
когда отсутствует внешнее возмущение, понимаемой как
xT(t0)Γ(t0)x(t0) ≤ c1 ⇒ xT(t)Γ(t)x(t) < c2
∀t ∈ [t0,T0],
или устойчивости по входу и выходу на конечном интервале при заданных
c2, d и Γ(t), когда начальное состояние нулевое, понимаемой как
∥v∥2[t
≤ d ⇒ xT(t)Γ(t)x(t) < c2
∀t ∈ [t0,T0],
0,T0]
выражаются неравенством
[
]
(3.5)
λmax Γ1/2(t)Y (t)Γ1/2(t)
<γ2
∀t ∈ [t0,T0
],
где Y (t) - решение уравнения (2.7) при B(t) ≡ 0, Y (t0) = Γ-1(t0) и γ2 = c2/c1
в первом случае и при Y (t0) = 0 и γ2 = c2/d во втором случае. Эти усло-
вия при согласовании обозначений совпадают с результатами [23, 24] и [25]
соответственно.
4. Оптимальное управление максимальным уклонением
Рассмотрим теперь нестационарную систему с управлением:
x = A(t)x + B(t)v + Bu(t)u, x(t0) = x0,
(4.1)
z = C(t)x + D(t)u,
44
где u ∈ Rnu - управление. Поставим задачу построения оптимального управ-
ления в форме обратной связи u(t, x) = Θ(t)x, t ∈ [t0, T0], минимизирующего
максимальное уклонение выхода замкнутой системы
sup
|z(t)|
t∈[t0,T0]
(4.2)
J [Θ(t)] = sup
(
)1/2 .
x0, v∈L2
xT0R-1x0 + ∥v∥2
[t0,T0]
Иначе говоря, требуется найти переменные коэффициенты обратной свя-
зи Θ(t), минимизирующие функционал J[Θ(t)]. Уравнения замкнутой систе-
мы имеют вид:
x = Ac(t)x + B(t)v, x(t0) = x0,
(4.3)
z = Cc(t)x,
где Ac(t) = A(t) + Bu(t)Θ(t), Cc(t) = C(t) + D(t)Θ(t).
Применяя теорему 2.1, получим
[
]
(4.4)
J [Θ(t)] = sup λ1/2max
Cc(t)Y∗(t)CTc(t)
,
t∈[t0,T0]
где матрица Y∗(t) есть решение дифференциального матричного уравнения
Y
(4.5)
= Ac(t)Y + Y ATc (t) + B(t)BT(t), Y (t0
)=R.
Для решения поставленной задачи введем матрицу Z(t) = Θ(t)Y (t) и перей-
дем от задачи (4.4), (4.5) к эквивалентной задаче оптимального управления,
которая с учетом леммы Шура сформулирована как задача полуопределен-
ного программирования.
Теорема 4.1. Оптимальное управление в задаче минимизации макси-
мального уклонения выхода системы (4.1) на конечном отрезке [t0, T0] име-
ет матрицу обратной связи Θ∗(t) = Z∗(t)Y-1∗(t), где Z∗(t), Y∗(t) - решение
задачи минимизации γ2 при ограничениях:
Y (t) - A(t)Y (t) - Y (t)AT(t) - Bu(t)Z(t) - ZT(t)BTu (t) - B(t)BT(t) = 0,
(
)
(4.6)
Y (t)
⋆
≥ 0, Y (t0) = R
∀t ∈ [t0,T0].
C(t)Y (t) + D(t)Z(t) γ2I
Для вычисления искомых параметров обратной связи проведем дискре-
тизацию указанной задачи. Введем на отрезке [t0, T0] равномерную сетку
tk = tk-1 + h, k = 1,... ,N, где h = (T0 - t0)/N, и запишем дискретный ана-
лог рассматриваемой задачи:
min γ2 :
(
)
Yk+1 - Yk - h
AkYk + YkATk + Bu,kZk + ZTkBTu,k + BkBTk
= 0,
(4.7)
(
)
Yk
⋆
≥ 0, Y0 = R; k = 0, . . . , N - 1,
CkYk + DkZk
γ2I
45
где индекс k указывает на значение в момент времени tk. Решив эту зада-
чу полуопределенного программирования относительно неизвестных Yk, Zk,
k = 0,...,N - 1 и γ2, найдем матрицы Θk = ZkY -1k.
Если система (4.1) без управления не является ограниченной в смысле
определения (3.3) на конечном отрезке [t0, T0] при данных s1, s2 и Γ(t), то
возникает вопрос о существовании нестационарной линейной обратной свя-
зи, при которой замкнутая система обладает этим свойством. Принимая во
внимание теорему 3.1, приходим к следующему утверждению.
Теорема 4.2. Для существования закона управления вида u(t) =
= Θ(t)x(t), при котором система (4.1) является ограниченной на конечном
отрезке [t0,T0] при данных s1, s2 и Γ(t), необходимо и достаточно, чтобы
задача
Y (t) - A(t)Y (t) - Y (t)AT(t) - Bu(t)Z(t) - ZT(t)BTu (t) - B(t)BT(t) = 0,
(
)
(4.8)
Y (t)
⋆
≥ 0, Y (t0) = Γ-1(t0)
∀t ∈ [t0,T0]
Γ1/2(t)Y (t) (s2/s1)I
была разрешима относительно неизвестных матричных функций Y (t)
и Z(t). Если это условие выполнено, то матрица искомой обратной связи
определяется как Θ(t) = Z(t)Y-1(t).
Проверка выполнения этого условия и нахождение матриц параметров со-
ответствующей обратной связи осуществляются путем дискретизации (4.8) и
проверки разрешимости соответствующих линейных матричных неравенств.
5. Многокритериальные управления максимальными уклонениями
При оптимизации максимального уклонения определенного выхода систе-
мы некоторые переменные и управление могут принимать достаточно боль-
шие значения. В связи с этим целесообразно рассмотреть многокритериаль-
ную задачу управления максимальными уклонениями нескольких выходов.
Для синтеза многокритериального управления, рассмотренного далее, потре-
буется расширить понятие максимального уклонения на случай, когда выход
системы составлен из нескольких векторов разных, вообще говоря, размер-
ностей.
Рассмотрим систему:
x = A(t)x + B(t)v, x(t0) = x0,
(5.1)
z = col(z1,...,zm), zi = C(i)(t)x, i = 1,...,m,
выход которой состоит из m векторов zi ∈ Rni . Введем некоторые обозна-
чения. Пусть вектор a ∈ Rna представлен в виде a = col (a1, . . . , am), где
∑m
ai ∈ Rni,
ni = na. Обозначим обобщенную ∞-норму вектора a через
i=1
|a|g∞ = max1≤i≤m |ai|, где |ai| - евклидова норма вектора ai. В частных слу-
чаях эта норма совпадает с обычной ∞-нормой: если m = 1, то |a|g∞ = |a|,
а если m = na, то |a|g∞ = |a|∞ = max1≤i≤na |ai|, где ai - компоненты вектора a.
46
Максимальное уклонение комбинированного выхода z этой системы на ко-
нечном интервале [t0, T0] при начальном и внешнем возмущениях определим
как
sup
max
|zi(t)|
i=1,...,m
t∈[t0,T0]
J0,v = sup
(
)1/2 =
x0, v∈L2
xT0R-1x0 + ∥v∥2
[t0,T0]
(5.2)
sup
|z(t)|g∞
t∈[t0,T0]
= sup
(
)1/2 = max
J(i)0,v,
x0, v∈L2
i=1,...,m
xT0R-1x0 + ∥v∥2
[t0,T0]
где J(i)0,v - максимальное уклонение выхода zi, определенное в (2.2). Условие
J0,v < γ отвечает теперь более общему понятию ограниченности системы (5.1)
на конечном интервале, когда для нескольких ее выходов выполняются нера-
венства |zi(t)| < γ, i = 1, . . . , m, для всех t ∈ [t0, T0] при любых начальных
условиях и внешних возмущениях, для которых xT0R-1x0 + ∥v∥2[t0,T0]≤1.
Из теоремы 2.1 непосредственно следует, что
[
]
(5.3)
J0,v = max
sup λ1/2max C(i)(t)Y (t)C(i)T(t) ,
i=1,...,m t∈[t0,T0]
где матрица Y (t) есть решение дифференциального матричного уравне-
ния (2.7). В частном случае zi могут быть компонентами вектора z и тогда
[
]
J0,v = max
sup d1/2max C(i)(t)Y (t)C(i)T(t)
,
i=1,...,m t∈[t0,T0]
где dmax(·) обозначает максимальный диагональный элемент соответствую-
щей матрицы. Соответствующим образом определяются максимальное укло-
нение комбинированного выхода при начальном возмущении и максимальное
уклонение комбинированного выхода при внешнем возмущении. Заметим, что
для устойчивой линейной стационарной системы при внешнем возмущении на
бесконечном горизонте максимальное уклонение комбинированного выхода,
состоящего из нескольких векторов, совпадает с обобщенной H2 нормой, по-
нимаемой как в [19].
Далее переходим к синтезу многокритериального управления для систе-
мы:
x = A(t)x + B(t)v + Bu(t)u, x(t0) = x0,
(5.4)
zi = C(i)(t)x + D(i)(t)u, i = 1,... ,m,
в классе обратных связей u = Θ(t)x. Введем критерии
sup
|zi(t)|
t∈[t0,T0]
(5.5)
Ji[Θ(t)] = sup
(
)1/2,
i = 1,...,m,
x0, v∈L2
xT0R-1x0 + ∥v∥2
[t0,T0]
47
и поставим задачу поиска оптимальных по Парето параметров регуляторов
{
}
(5.6)
ΘP (t) = arg min
Ji[Θ(t)], i = 1,... ,m
Для ее решения применим свертку Гермейера [31]:
{
}
Jα[Θ(t)] = max
Ji[Θ(t)]/αi, αi > 0
i=1,...,m
В [19] установлено, что множество оптимальных по Парето решений содер-
жится в множестве оптимальных решений по отношению к данному функ-
ционалу при всех значениях αi. Обращаясь к (5.2), нетрудно видеть, что в
рассматриваемой многокритериальной задаче свертка Гермейера представля-
ет собой не что иное, как максимальное уклонение комбинированного выхода
системы:
x = [A(t) + Bu(t)Θ(t)]x + B(t)v, x(t0) = x0,
(5.7)
zα = col (z1,... ,zm), zi = α-1i[C(i)(t) + D(i)(t)Θ(t)]x, i = 1,... ,m,
где вектор zα состоит из параметризованных выходов исходной системы. Та-
ким образом, приходим к следующему утверждению.
Теорема 5.1. Оптимальные по Парето управления в многокритериаль-
ной задаче (5.6) минимизации максимальных уклонений выходов систе-
мы (5.4) суть оптимальные управления по отношению к максимально-
му уклонению комбинированного выхода системы (5.7) для всех αi > 0, i =
= 1, . . . , m.
Для численного решения этой задачи проведем, как и выше, дискретиза-
цию и с учетом того, что нахождение минимального значения J2α[Θ(t)] эк-
вивалентно вычислению минимального значения γ2, при котором для всех
t ∈ [t0,T0] выполнены неравенства
[
]
[
]T
C(i)(t) + D(i)(t)Θ(t) Y (t)
C(i)(t) + D(i)(t)Θ(t)
≤ γ2α2iI, i = 1,... ,m,
придем к следующей задаче полуопределенного программирования:
min γ2 :
(
)
Yk+1 - Yk - h
AkYk + YkATk + Bu,kZk + ZTkBTu,k + BkBTk
= 0,
(
)
(5.8)
Yk
⋆
≥ 0, Y0
= R,
C(i)kYk + D(i)kZk γ2α2iI
i = 1,...,m; k = 0,...,N - 1.
Для каждого набора αi, i = 1, . . . , m, матрицы параметров оптимальных по
Парето регуляторов находятся как Θk = ZkY-1k, где Yk, Zk - решения (5.8).
48
6. Результаты численных экспериментов
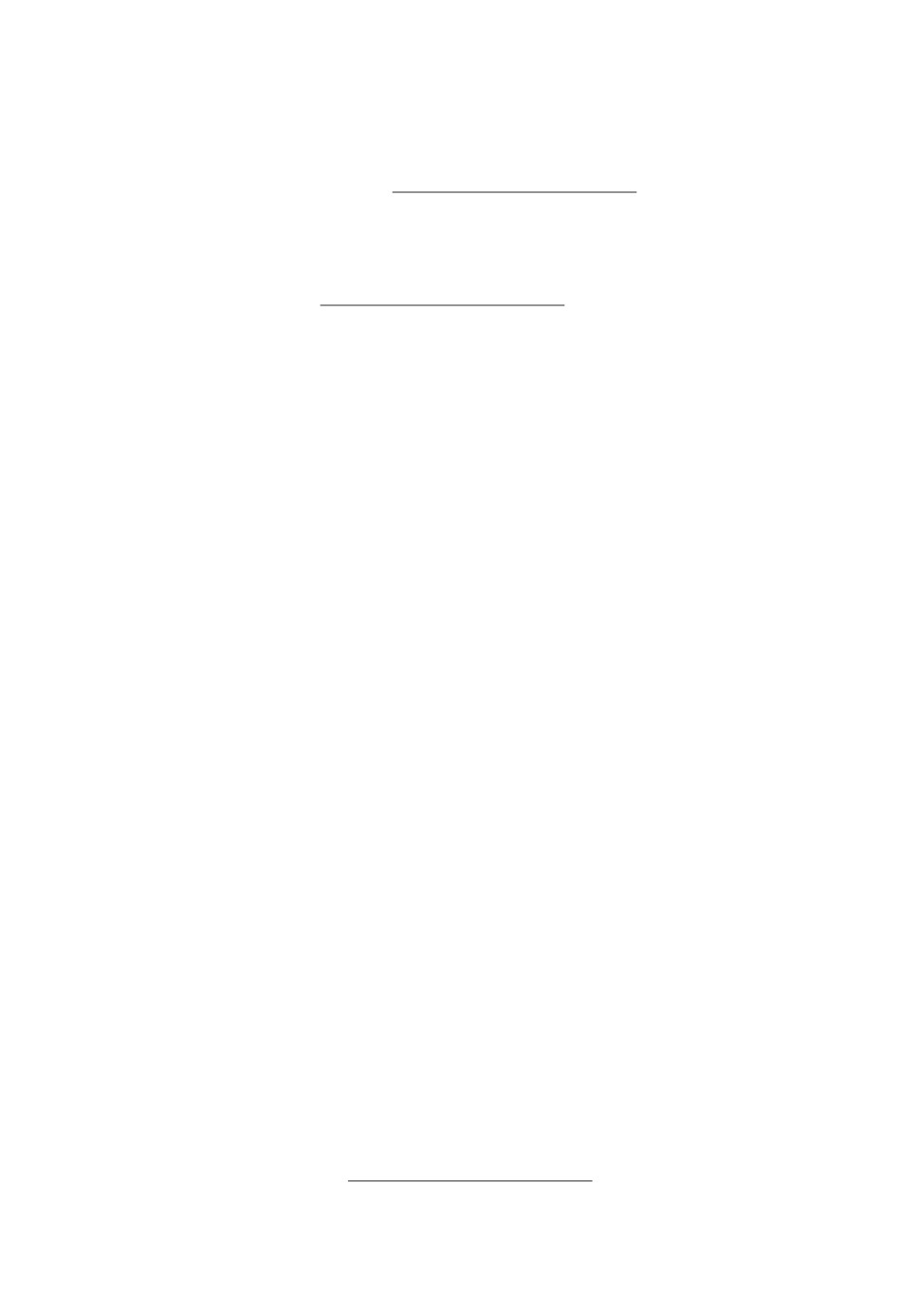
С целью иллюстрации приведенных выше теоретических результатов рас-
смотрим задачу активной виброзащиты объекта, подвергаемого вибрацион-
ным и ударным воздействиям. На рис. 1 показан защищаемый объект “2”,
связанный с подвижным основанием “1” посредством виброизолирующего
устройства “3”, включающего пассивную и активную части. Движения такой
системы описываются дифференциальными уравнениями:
x1 = x2,
x2 = -x1 - βx2 + u + v,
(6.1)
x1(0) = x10, x1(0) = x20,
z1 = x1, z2 = -x1 - βx2 + u,
где z1 — координата объекта защиты относительно подвижного основа-
ния, z2 — характеристика пассивной и активной частей виброизолирую-
щего устройства, v — внешнее воздействие, с точностью до знака совпа-
дающее с ускорением подвижного основания. Будем рассматривать задачу
оптимальной виброзащиты, состоящую в нахождении на конечном отрез-
ке времени t ∈ [0, T0] управления в форме нестационарной обратной связи
u = θ1(t)x1 + θ2(t)x2, минимизирующего в смысле Парето следующие функ-
ционалы:
sup
|x1(t)|
t∈[0,T0]
J1[Θ(t)] = sup
(
)1/2 ,
x0, v∈L2
xT0 R-1x0 + ∥v∥2
[0,T0]
(6.2)
sup
| - x1(t) - βx2(t) + u(t)|
t∈[0,T0]
J2[Θ(t)] = sup
(
)1/2
,
x0, v∈L2
xT0 R-1x0 + ∥v∥2
[0,T0]
где x0 = (x10 x20)T, Θ(t) = (θ1(t) θ2(t))T. Первый функционал характеризует
максимальное смещение объекта защиты относительно подвижного основа-
ния, а второй функционал — максимальное абсолютное ускорение объекта
x1
2
u
3
1
v
Рис. 1. Схематическое изображение системы активной виброзащиты.
49
3,5
J2
3,0
2,5
A
2,0
1,5
C
1,0
B
0,5
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
J1
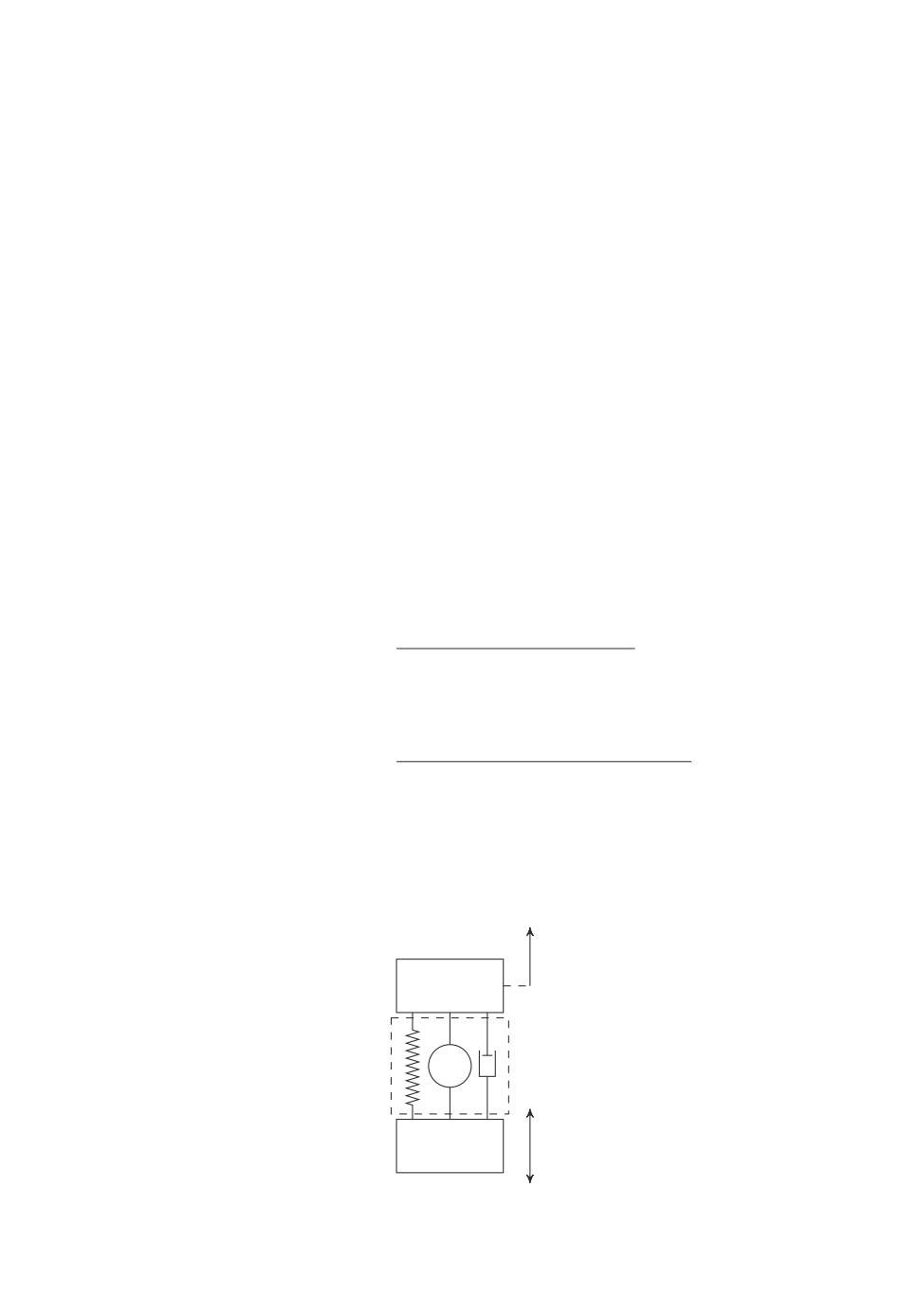
Рис. 2. Парето оптимальный фронт.
защиты или максимальную действующую на него силу. Эти показатели каче-
ства виброзащиты являются “конфликтующими”: увеличение силы, противо-
действующей движению объекта защиты относительно основания, приводит
к уменьшению его смещения.
Для численного решения указанной задачи, положим β = 0,1, R-1 =
= diag (10,1) и T0 = 20. С использованием теоремы 3.2 и соотношения (5.8)
были синтезированы оптимальные в смысле Парето регуляторы Θα(t) и
вычислены соответствующие им оптимальные значения функционалов. На
рис. 2 изображена оптимальная по Парето кривая (Парето оптимальный
фронт) на плоскости критериев (J1, J2), на которой указана точка B c коор-
динатами (0,930; 0,930). На этом же рисунке для сравнения указана точка A
с координатами (2,094; 2,106), отвечающая значениям функционалов в слу-
чае, когда в системе отсутствует активная составляющая виброзащиты, т.е. в
случае u = 0. Из представленных данных следует, что применение активной
виброзащиты позволяет улучшить показатели качества системы примерно в
два раза.
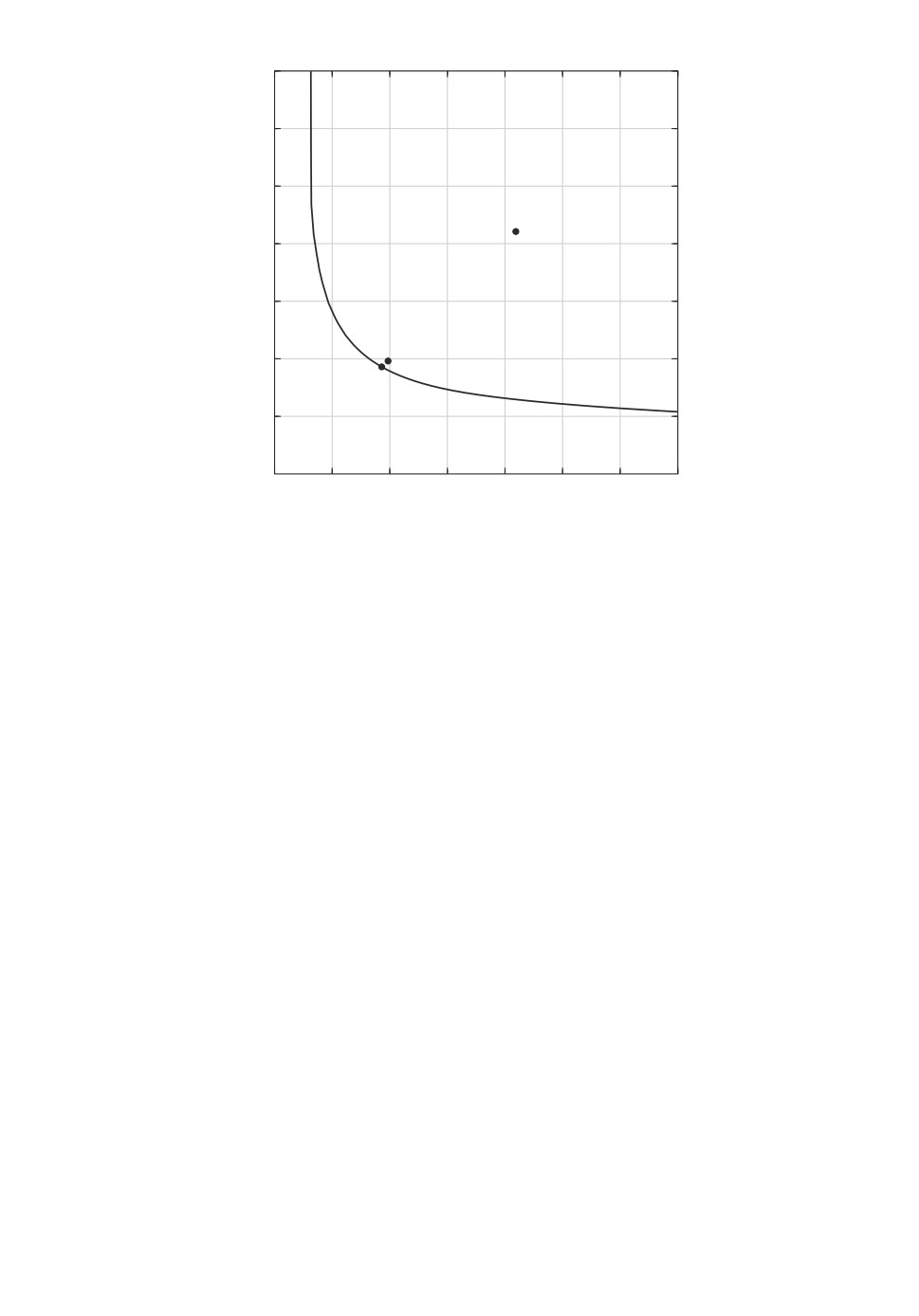
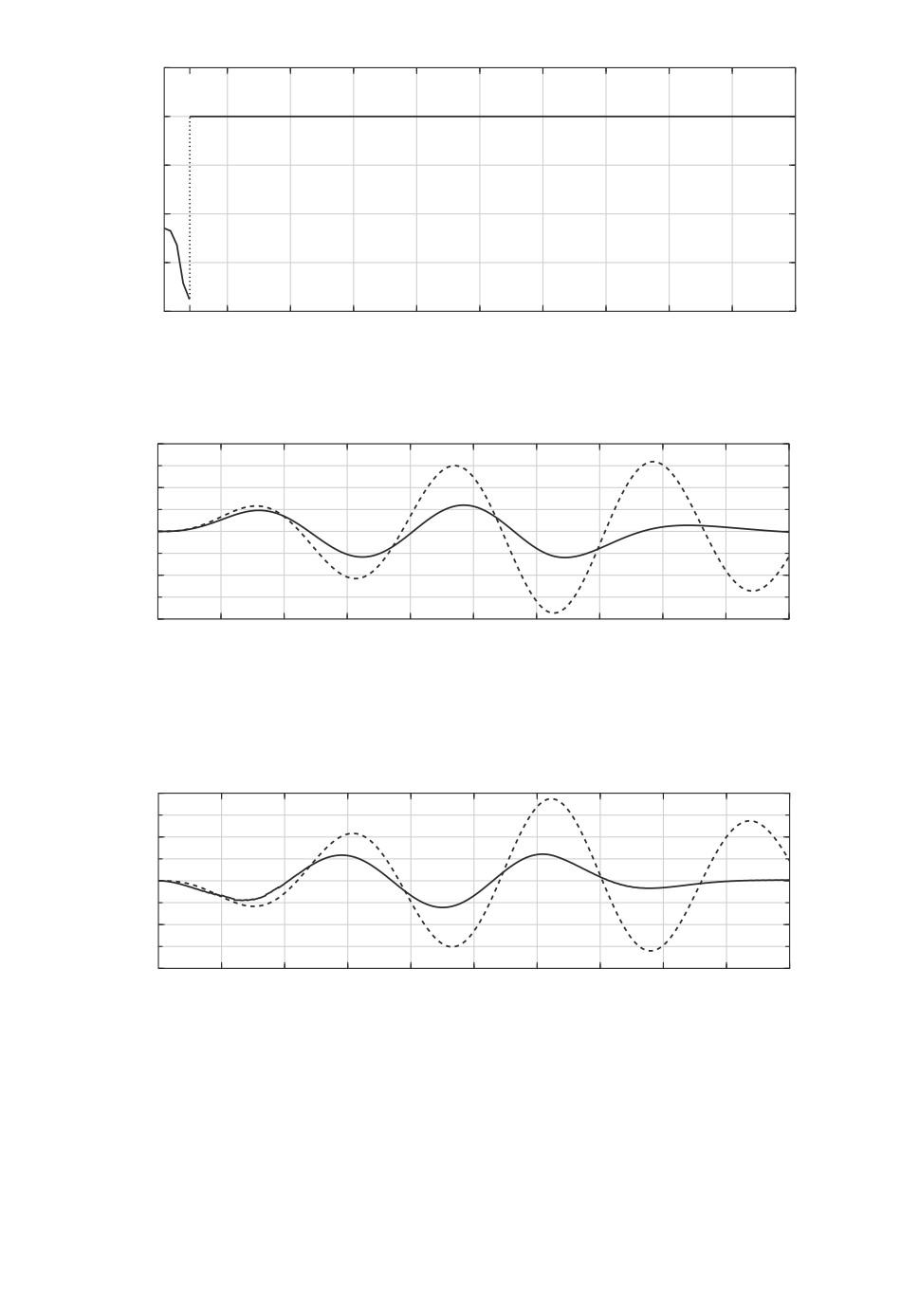
На рис. 3 приведены графики оптимальных по Парето коэффициентов
обратной связи Θα(t) в зависимости от времени (сплошная кривая соот-
ветствует коэффициенту θ1(t), а штриховая — коэффициенту θ2(t)) при
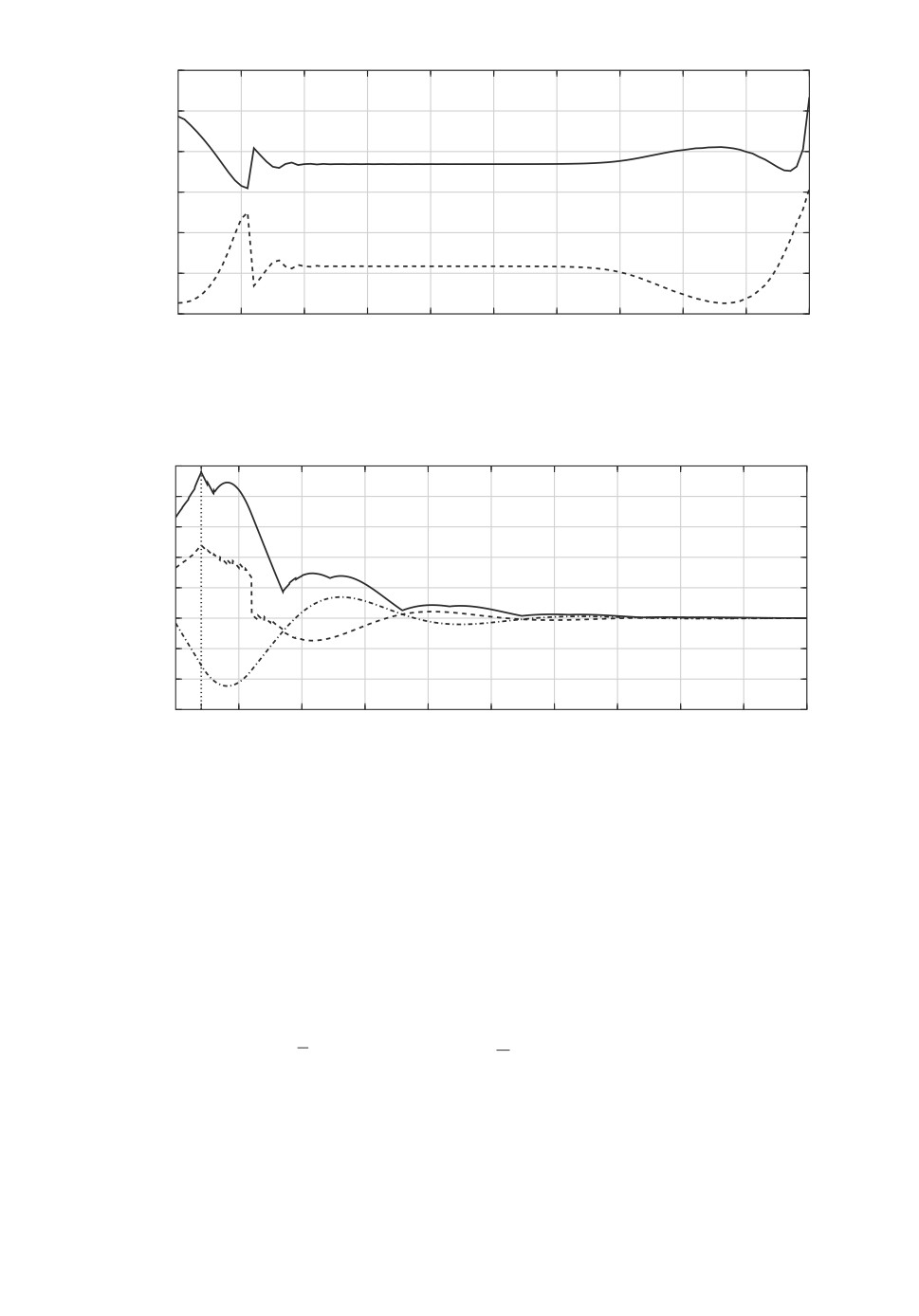
α = 0,5, отвечающие точке B. На рис. 4 показаны соответствующие графи-
ки изменения выходных переменных z1 = x1 (штрихпунктирная кривая) и
z2 = -x1 - βx2 + u (штриховая кривая), а также обобщенной ∞-нормы ком-
бинированного выхода zα при α1 = α2 = 1/2 (сплошная кривая), т.е.
|zα(t)|g∞ = 2 max{|z1(t)|, |z2(t)|},
50
0,9
1
,
2
0,6
0,3
0
0,3
0,6
0,9
2
4
6
8
10
12
14
16
18
20
t
Рис. 3. Графики зависимостей от времени оптимальных по Парето коэффи-
циентов обратной связи.
2,0
z1, z2
1,6
1,2
0,8
0,4
0
0,4
0,8
1,2
T*
2
4
6
8
10
12
14
16
18
20
t
Рис. 4. Графики зависимостей от времени выходов и |zα(t)|g∞ в замкнутой
оптимальной по Парето системе при наихудших начальном и внешнем возму-
щениях.
для наихудших начальных условий x∗0 = (-0,066; -0,689) и внешнего возму-
щения v∗(t), а на рис. 5 - график выбираемого в этих расчетах наихудшего
возмущения v∗(t) по отношению к максимальному уклонению этого комбини-
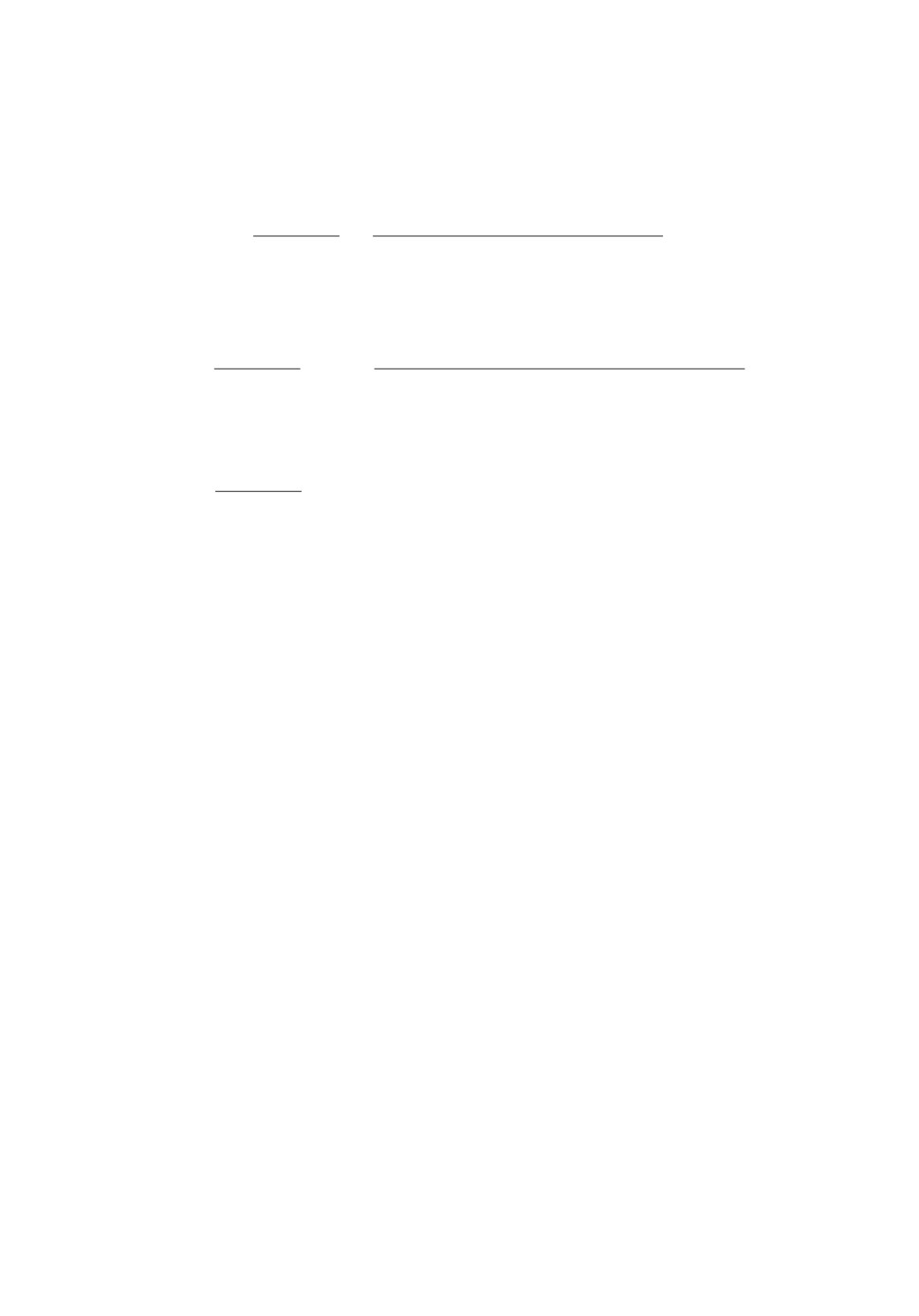
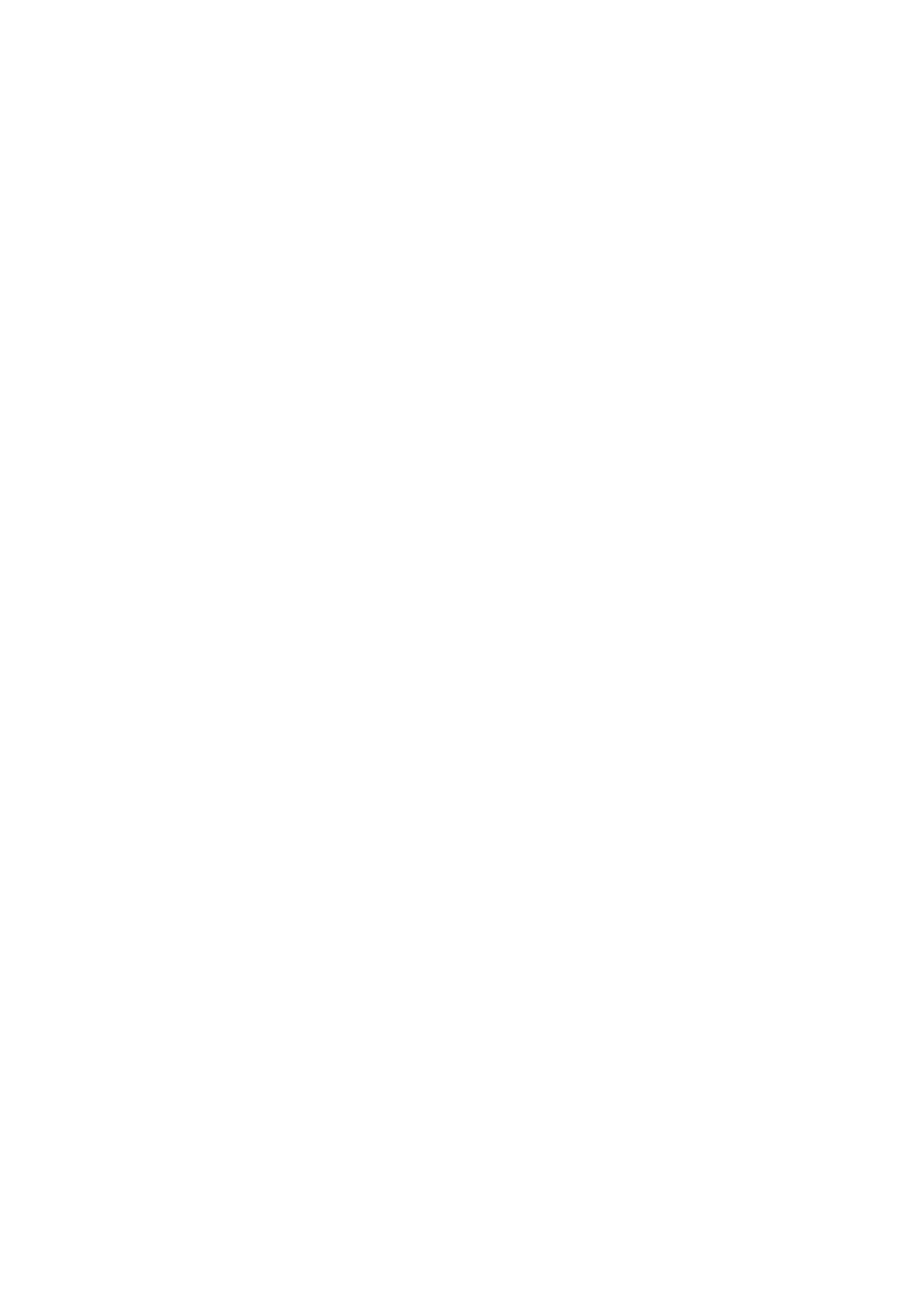
рованного выхода в замкнутой системе. На рис. 6 и 7 представлены графики
зависимостей выходов z1 и z2 системы с оптимальным управлением (сплош-
ные кривые), отвечающим точке B, и в отсутствие управления (штриховые
кривые) при одновременном действии ударного и гармонического возмуще-
√
ний: x10 = 0, x20 =
2/2, v(t) = sin t/(2√π), t ∈ [0,4π], v(t) ≡ 0, t ∈ (4π,20],
для которых
∫20
x220 +
|v(t)|2 dt = 1.
0
Эти графики демонстрируют хорошее качество активной виброзащиты.
51
0,3
v*
0
0,3
0,6
0,9
1,2
T*
2
4
6
8
10
12
14
16
18
20
t
Рис. 5. График наихудшего возмущения.
2
z
1
1
0
1
2
2
4
6
8
10
12
14
16
18
20
t
Рис. 6. Графики зависимостей от времени выхода z1 системы с оптимальным
по Парето управлением и в отсутствие управления при одновременном дей-
ствии ударного и гармонического возмущений.
2
z
2
1
0
1
2
2
4
6
8
10
12
14
16
18
20
t
Рис. 7. Графики зависимостей от времени выхода z2 системы с оптимальным
по Парето управлением и в отсутствие управления при одновременном дей-
ствии ударного и гармонического возмущений.
Наконец, заметим, что примерно половину времени функционирования
системы коэффициенты обратной связи сохраняют “постоянные” значения
(рис. 3). Интересно сравнить значения функционалов при оптимальном регу-
52
ляторе и стационарном регуляторе, отвечающим этим “постоянным” значени-
ям θ1(t) ≡ 0,2180 и θ2(t) ≡ -0,5694, которым на рис. 2 соответствует точка C
с координатами (0,985; 0,981). Как следует из приведенных данных, потери в
качестве виброзащиты при использовании такого стационарного регулятора
сравнительно невелики.
7. Заключение
В статье показано, что максимальные уклонения выходов линейной неста-
ционарной системы на конечном временном горизонте при внешнем и/или
начальном возмущениях, а также максимальные уклонения выходов стацио-
нарной системы на бесконечном горизонте при внешнем возмущении можно
характеризовать в терминах решений дифференциальных или алгебраиче-
ских матричных уравнений и, как следствие, в терминах линейных матрич-
ных неравенств. Это позволяет синтезировать оптимальные по максимально-
му уклонению выхода законы управления, в том числе и многокритериаль-
ные. Результаты численных экспериментов, проведенных для задачи актив-
ной виброзащиты, демонстрируют эффективность предлагаемого подхода.
Авторы признательны Б.Т. Поляку за обсуждения, которые инициировали
проведение исследований, изложенных в данной статье.
ПРИЛОЖЕНИЕ
Доказательство теоремы 2.1. С целью нахождения величины J0,v
рассмотрим вспомогательную вариационную задачу: для системы (2.1) найти
наихудшее возмущение v = v∗(t) и наихудший начальный вектор x∗0, достав-
ляющие максимум функционалу
(Π.1)
J (v) = |z(T )|2 = xT(T )CT
(T )C(T )x(T )
при ограничении
∫T
(Π.2)
xT0R-1x0 +
|v(t)|2
dt = 1
t0
в произвольный, но фиксированный момент времени T ∈ (t0, T0]. Введем
функцию Гамильтона
H = ψT[A(t)x + B(t)v] - μvTv,
применим стандартную процедуру решения вариационных задач и придем к
следующей краевой задаче:
x = A(t)x + (2μ)-1B(t)BT(t)ψ,
ψ=-AT(t)ψ,
ψ(t0) = 2μR-1x(t0),
ψ(T ) = 2CT(T )C(T )x(T ).
53
В этих уравнениях искомое наихудшее возмущение для вспомогательной за-
дачи имеет вид
v∗(t) = (2μ)-1BT(t)ψ(t),
где положительный параметр μ, являющийся множителем Лагранжа, пока
неизвестен и подлежит в дальнейшем определению.
Далее, исключая вспомогательную переменную ψ и связывая переменные
ψ и x линейным преобразованием ψ(t) = 2X(t)x(t), получим:
(X˙ + XA(t) + AT(t)X + μ-1XB(t)BT(t)X)x(t) = 0,
(Π.3)
X(t0)x(t0) = μR-1x(t0),
X(T )x(T ) = CT(T )C(T )x(T ).
При такой замене наихудшее возмущение имеет вид
v∗(t) = μ-1BT(t)X(t)x(t).
Определим теперь значение параметра μ. Вычисляя производную по времени
от квадратичной формы xT(t)X(t)x(t) вдоль оптимальной траектории, отве-
чающей наихудшему возмущению v∗(t), с учетом первого равенства в (Π.3)
получаем
d
xT(t)X(t)x(t) = μvT∗(t)v∗(t).
dt
Интегрируя это равенство в пределах от t0 до T с учетом двух последних
равенств в (Π.3), имеем
⎛
⎞
T
∫
J (v∗) = xT(T )CT(T )C(T )x(T ) = μ ⎝xT0R-1x0 +
|v∗(t)|2dt⎠ .
t0
С учетом ограничения типа равенства (Π.2) в рассматриваемой вариационной
задаче получаем искомое значение параметра μ, совпадающее с оптимальным
значением функционала (Π.1):
(Π.4)
μ
J (v∗
).
Сделаем далее замену Q = X/μ в соотношениях (Π.3):
(Q˙ + QA(t) + AT(t)Q + QB(t)BT(t)Q)x(t) = 0,
(Π.5)
Q(t0)x(t0) = R-1x(t0),
μQ(T)x(T) = CT(T)C(T)x(T).
Наконец, введем матрицу Y = Q-1, которая удовлетворяет матричному диф-
ференциальному уравнению
Y
(Π.6)
= A(t)Y + Y AT(t) + B(t)BT(t), Y (t0
)=R.
54
Если матрица Y = Y (t) является решением задачи Коши (Π.6), то для лю-
бого вектора x(t) справедливы первые два уравнения (Π.5). Заметим так-
же, что матрица Y (t) является положительно определенной для всех значе-
ний t ∈ [t0, T ], поскольку решение матричного дифференциального уравне-
ния (Π.6) может быть представлено в виде
∫t
Y (t) = Φ(t, t0)Y (t0)ΦT(t, t0) + Φ(t, τ)B(τ)BT(τ)ΦT(t, τ)dτ ,
t0
где Φ(t, τ) - фундаментальная матрица решений уравнения
x = A(t)x.
Таким образом, матрица Y , а следовательно, и матрица Q являются невы-
рожденными для всех t ∈ [t0, T ].
Обратимся теперь к последнему равенству в (Π.5), которое можно пере-
писать в виде
Y (T )CT(T )C(T )x(T ) = μx(T ).
Данное соотношение можно рассматривать как задачу на собственные значе-
ния и собственные векторы матрицы Y (T )CT(T )C(T ). Поскольку в исходной
вариационной задаче требуется найти максимальное значение функционала,
то с учетом (Π.4) получаем, что μ есть максимальное собственное значение
матрицы Y (T )CT(T )C(T ) или равное ему максимальное собственное значе-
ние матрицы C(T )Y (T )CT(T ) (см. [32], с. 71). Итак,
(
)
μ=λmax
C(T )Y (T )CT(T )
Осталось найти наихудший вектор начальных условий x0. С этой целью за-
мкнем исходную систему (2.1) наихудшим возмущением
v∗(t) = BT(t)Y-1(t)x(t)
и рассмотрим задачу Коши
x = (A(t) + B(t)BT(t)Y -1(t))x,
(Π.7)
x(T ) = gemax(Y (T )CT(T )C(T )),
где Y (t) есть решение матричного дифференциального уравнения (Π.6), а
свободный параметр g подлежит в дальнейшем определению. Обозначим че-
рез x = s(t) решение указанной задачи Коши при g = 1, тогда искомое зна-
чение параметра g определится из условия (Π.2):
⎛
⎞-1/2
T
∫
(Π.8) g =⎝sT(t0)R-1s(t0) + sT(τ)Y-1(τ)B(τ)BT(τ)Y-1(τ)s(τ)dτ ⎠
t0
55
Таким образом, исходя из необходимых условий оптимальности функциона-
л
J (v), наихудшие возмущение v∗(t) и вектор начальных условий x∗0 по от-
ношению к этому функционалу определяются так:
(Π.9)
v∗(t) = gBT(t)Y-1(t)s(t), x∗0 = gs(t0), t ∈ [t0
,T].
При этом оптимальное значение функционал
J (v) таково:
(
)
J (v∗) = λmax
C(T )Y (T )CT(T )
Обратно: пусть Y (t) удовлетворяет (Π.6). Тогда для функции V (x) =
= xTY -1x в силу системы (2.1) выполнено равенство
V
= |v|2 - |v - BTY -1x|2.
Интегрируя это уравнение с учетом того, что Y-1(t0) = R, получим
(Π.10)
xT(T)Y-1(T)x(T) = xT0R-1x0 + ∥v∥2[t
- ∥v - BTY -1x∥22.
0,T]
Отсюда следует, что при любых допустимых возмущениях и началь-
ных условиях, удовлетворяющих ограничению (Π.2), имеет место неравен-
ство xT(T )Y-1(T )x(T ) ≤ 1. Это значит, что x(T )xT(T ) ≤ Y (T ). Следова-
тельно,
J (v) = |z(T )|2 ≤ λmax(C(T )Y (T )CT(T )) и максимум достигается при
v∗(t) = BT(t)Y-1(t)x(t), где x(t) - решение уравнения (Π.7), а g определено
в (Π.8).
Возвращаясь к исходной задаче нахождения максимального уклонения,
записанного в виде (2.3), получаем, что
(Π.11)
J0,v = sup λ1/2max(C(t)Y0,v(t)CT
(t)),
t∈[t0,T0]
где Y0,v(t) - решение уравнения (Π.6). Пусть T∗ - момент времени, в который
[
]
[
]
λmax
C(T∗)Y0,v(T∗)CT(T∗)
= sup λmax
C(t)Y0,v(t)CT(t)
t∈[t0,T0]
Тогда наихудшие возмущение и начальное состояние по отношению к J0,v
определяются как в (Π.9) при T = T∗.
Теперь обратимся к частным случаям. Так же как и выше, запишем, что
|z(T )|
Jv = sup sup
T ∈[t0,T0] v∈L2 ∥v∥[t0,T0]
При нулевых начальных условиях в системе (2.1) выражение для z(t) имеет
вид
∫t
z(t) = C(t) Φ(t, τ)B(τ)v(τ)dτ .
t0
56
Записывая
|z(t)| = max eTz(t)
|e|=1
и используя неравенство Коши-Буняковского, оценим |z(t)|:
⎛
⎞1/2 ⎛
⎞1/2
∫
t
∫
t
|z(t)| ≤ max⎝
|BT(τ)ΦT(t, τ)CT(t)e|2dτ⎠
⎝
|v(τ)|2dτ ⎠
|e|=1
t0
t0
Далее получаем, что
⎛
⎡
⎤
⎞1/2
∫
t
|z(t)|
sup
≤⎝maxeTC(t)⎣
Φ(t, τ)B(τ)BT(τ)ΦT(t, τ)dτ ⎦ CT(t)e⎠
v∈L2 ∥v∥2
|e|=1
t0
Из последнего неравенства следует, что
|z(T )|
[
]
sup
≤λ1/2max
C(T )Yv(T )CT(T )
,
v∈L2 ∥v∥[t0,T0]
где
∫t
Yv(t) = Φ(t,τ)B(τ)BT(τ)ΦT(t,τ)dτ
t0
- решение матричного уравнения
Y
= A(t)Y + Y AT(t) + B(t)BT(t), Y (t0) = 0.
Нетрудно проверить, что построенная оценка достигается точно при
[
]
v∗(τ) = BT(τ)ΦT(T,τ)CT(T)emax
C(T )Yv(T )CT(T )
,
τ ∈ [t0,T].
Таким образом,
|z(T )|
[
]
sup
=λ1/2max
C(T )Yv(T )CT(T )
v∈L2 ∥v∥[t0,T0]
Возвращаясь наконец к исходной задаче, получаем
sup
|z(t)|
t∈[t0,T0]
[
]
Jv
= sup
= sup λ1/2max
C(T )Yv(T )CT(T )
v∈L2
∥v∥[t0,T0]
T ∈[t0,T0]
Представим теперь J0 в виде
|z(t)|
J0 = sup sup
t∈[t0,T0] x0=0 (x0R-1x0)1/2
57
Выражение для z(t) может быть представлено в виде
z(t) = Φ(t, t0)x0.
Рассмотрим отношение
|z(t)|2
xT0ΦT(t,t0)CT(t)C(t)Φ(t,t0)x0
=
xT0R-1x0
xT0R-1x0
Произведем далее замену ξ0 = R-1/2x0 и получим
2
|z(t)|
ξT0R1/2ΦT(t,t0)CT(t)C(t)Φ(t,t0)R1/2ξ0
sup
= sup
,
ξT0ξ0
x0=0 x0R-1x0 ξ0=0
откуда следует, что
2
[
]
|z(t)|
sup
= λmax R1/2ΦT(t,t0)CT(t)C(t)Φ(t,t0)R1/2
=
x0=0 x0R-1x0
[
]
=λmax
C(t)Φ(t, t0)RΦT(t, t0)CT(t)
Заметим далее, что
C(t)Φ(t, t0)RΦT(t, t0)CT(t) = C(t)Y0(t)CT(t),
где матрица Y0(t) есть решение дифференциального матричного уравнения
Y
= A(t)Y + Y AT(t), Y (t0) = R.
Итак, окончательно имеем
[
]
J0 = sup λ1/2max
C(t)Y0(t)CT(t)
t∈[t0,T0]
Для определения наихудшего вектора начальных условий x∗0 предлагается
следующий алгоритм. Сначала определим момент времени t∗ такой, что
[
]
[
]
λmax
C(t∗)Y0(t∗)CT(t∗)
= sup λmax
C(t)Y0(t)CT(t)
,
t∈[t0,T0]
затем найдем нормированный собственный вектор e∗max матрицы
R1/2ΦT(t∗,t0)CT(t∗)C(t∗)Φ(t∗,t0)R1/2, отвечающий максимальному соб-
ственному числу. В результате искомый вектор x∗0 = R1/2e∗max. Терема 2.1
доказана.
Доказательство теоремы 3.1. Если в определении максимального
уклонения, данного в (2.2), выбрать z = Γ1/2(t)x и R = Γ(t0), то получим,
что выполнение (3.3) эквивалентно неравенству J20,v < s2/s1. Действительно,
58
если J20,v < s2/s1, то из определения J0,v непосредственно следует выполне-
ние (3.3). Для обоснования справедливости обратного утверждения предпо-
ложим, что при выполнении (3.3) имеем J20,v ≥ s2/s1. Так как
J20,v = s-11 sup
sup xT(t)Γ(t)x(t) ≥ s2/s1,
t∈[t0,T0]
xt0,v∈L2
где sup берется по всем xT(t0)Γ(t0)x(t0) + ∥v∥22 = s1, то sup xT(t)Γ(t)x(t) ≥
t∈[t0,T0]
≥ s2, что противоречит (3.3). Таким образом, применяя теорему 2.1, прихо-
дим к (3.4). Терема 3.1 доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Фельдбаум A.A. О распределении корней характеристического уравнения си-
стем регулирования // АиТ. 1948. № 4. C. 253-279.
2.
Измайлов P.Н. Эффект “всплеска"в стационарных линейных системах со ска-
лярными входами и выходами // АиТ. 1987. № 8. С. 56-62.
Izmailov R.N. The Peak Effect in Stationary Linear Systems with Scalar Inputs and
Outputs // Autom. Remote Control. 1987. V. 48. No. 8. P. 1018-1024.
3.
Булгаков Б.В. О накоплении возмущений в линейных колебательных системах
с постоянными параметрами // ДАН СССР. 1946. Т. 51. № 5. С. 339-342.
4.
Александров В.В. К задаче Булгакова о накоплении возмущений // Докл. АН
СССР. Сер. Кибернетика и теория регулирования. 1969. Т. 186. № 3. С. 526-528.
5.
Жермоленко В.Н. О максимальном отклонении линейной системы // АиТ. 2012.
№ 7. С. 3-14.
Zhermolenko V.N. On Maximal Deviation of Linear System // Autom. Remote
Control. 2012. V. 73. No. 7. P. 1117-1125.
6.
Moler C., Van Loan C. Nineteen Dubious Ways to Compute the Exponential of a
Matrix, Twenty-Five Years Later // SIAM Rev. 2003. V. 45. No. 1. P. 3-49.
7.
Boyd S., El Ghaoui L., Feron E., Balakrishnan V. Linear Matrix Inequalities in
Systems and Control Theory. Philadelphia: SIAM, 1994.
8.
Whidborne J.F., McKernan J. On Minimizing Maximum Transient Energy
Growth // IEEE Trans. Autom. Control. 2007. V. 52. No. 9. P. 1762-1767.
9.
Поляк Б.Т., Тремба А.А., Хлебников М.В., Щербаков П.С., Смирнов Г.В. Боль-
шие отклонения в линейных системах при ненулевых начальных условиях //
АиТ. 2015. № 6. С. 18-41.
Polyak B.T., Tremba A., Khlebnikov M.V., Shcherbakov P.S., Smirnov G.V. Large
Deviations in Linear Control Systems with Nonzero Initial Conditions // Autom.
Remote Control. 2015. V. 76. No. 6. P. 957-976.
10.
Polyak B.T., Smirnov G. Large Deviations for Non-zero Initial Conditions in Linear
Systems // Automatica. 2016. V. 74. P. 297-307.
11.
Агиевич В.Н., Парсегов С.Э., Щербаков П.С. Верхние оценки всплеска в линей-
ных дискретных системах // АиТ. 2018. № 11. С. 32-46.
Ahiyevich U.M., Parsegov S.E., Shcherbakov P.S. Upper Bounds on Peaks in
Discrete-Time Linear Systems // Autom. Remote Control. 2018. V. 79. No. 11.
P. 1976-1988.
59
12.
Wilson D.A. Convolution and Hankel Operator Norms for Linear Systems // IEEE
Trans. Autom. Control. 1989. V. 34. P. 94-97.
13.
Wilson D.A. Extended Optimality Properties of the Linear Quadratic Regulator and
Stationary Kalman Filter // IEEE Trans. Autom. Control. 1990. V. 35. P. 583-585.
14.
Kim J.H., Hagiwara T. Upper/Lower Bounds of Generalized H2 Norms in Sampled-
Data Systems with Convergence Rate Analysis and Discretization Viewpoint // Syst.
Control Lett. 2017. V. 107. P. 28-35.
15.
Rotea M.A. The Generalized H2 Control Problem // Automatica. 1993. V. 29. No. 2.
P. 373-385.
16.
Wilson D.A., Nekoui M.A., Halikias G.D. An LQR Weight Selection Approach to
the Discrete Generalized H2 Control Problem // Int. J. Control. 1998. V. 71. No. 1.
P. 93-101.
17.
Баландин Д.В., Коган М.М. Синтез линейных законов управления при фазовых
ограничениях // АиТ. 2009. № 6. С. 48-57.
Balandin D.V., Kogan M.M. Linear Control Design under Phase Constraints //
Autom. Remote Control. 2009. V. 70. No. 6. P. 958-966.
18.
Коган М.М., Кривдина Л.Н. Синтез многоцелевых линейных законов управ-
ления дискретными объектами при интегральных и фазовых ограничениях //
АиТ. 2011. № 7. С. 83-95.
Kogan M.M., Krivdina L.N. Synthesis of Multipurpose Linear Control Laws of
Discrete Objects under Integral and Phase Constraints // Autom. Remote Control.
2011. V. 72. No. 7. P. 1427-1439.
19.
Баландин Д.В., Коган М.М. Оптимальное по Парето обобщенное H2-управление
и задачи виброзащиты // АиТ. 2017. № 8. С. 76-90.
Balandin D.V., Kogan M.M. Pareto Optimal Generalized H2-control and
Vibroprotection Problems // Autom. Remote Control. 2017. V. 78. No. 8. P. 1417-
1429.
20.
Balandin D.V., Kogan M.M. Multi-Objective Generalized H2 Control
//
Automatica. 2019. V. 99. No. 1. P. 317-322.
21.
Барабанов А.Е., Граничин О.Н. Оптимальный регулятор дискретного объекта с
ограниченной помехой // АиТ. 1984. № 5. С. 39-46.
Barabanov A.E., Granichin O.N. An Optimal Controller for a Linear Plant with
Bounded Noise // Autom. Remote Control. 1984. V. 45. Part 1. No. 5. P. 578-584.
22.
Dahleh M.A., Diaz-Bobillo I.J. Control of uncertain systems: a linear programming
approach. Englewood Cliffs. N.J.: Prentice-Hall, 1995.
23.
Amato F., Ariola M., Cosentino C., Abdallah C.T., Dorato P. Necessary and
Sufficient Conditions for Finite-Time Stability of Linear Systems // Proc. Amer.
Control Conf. Denver, USA. 2003. P. 4452-4456.
24.
Garcia G., Tarbouriech S., Bernussou J. Finite-Time Stabilization of Linear Time-
Varying Continuous Systems // IEEE Trans. Autom. Control. 2009. V. 54. No. 2.
P. 364-369.
25.
Amato F., Carannante G., De Tommasi G., Pironti A. Input-Output Finite-Time
Stability of Linear Systems: Necessary and Sufficient Conditions // IEEE Trans.
Autom. Control. 2012. V. 57. No. 12. P. 3051-3063.
26.
Amato F., Ariola M., Cosentino C. Finite-time Control of Linear Time-Varying
Systems via Output Feedback // Proc. Amer. Control Conf. Portland, USA. 2005.
P. 4722-4726.
27.
Khargonekar P.P., Nagpal K.M., Poolla K.R. H∞ Control with Transients // SIAM
J. Control Optim. 1991. V. 29. No. 6. P. 1373-1393.
60
28. Lu W.W., Balas G.J., Lee E.B. A Variational Approach to H∞ Control with
Transients // IEEE Trans. Autom. Control. 1999. V. 44. No. 10. P. 1875-1879.
29. Баландин Д.В., Коган М.М. Обобщенное H∞-оптимальное управление как ком-
промисс между H∞-оптимальным и γ-оптимальным управлениями // АиТ. 2010.
№ 6. С. 20-38.
Balandin D.V., Kogan M.M. Generalized H∞-optimal Control as a Trade-off between
the H∞-optimal and γ-optimal Controls // Autom. Remote Control. 2010. V. 71.
No. 6. P. 993-1010.
30. Balandin D.V., Kogan M.M. LMI Based H∞-optimal Control with Transients //
Int. J. Control. 2010. V. 83. No. 8. P. 1664-1673.
31. Гермейер Ю.Б. Введение в теорию исследования операций. М.: Наука, 1971.
32. Хорн Р., Джонсон Ч. Матричный анализ. М.: Мир, 1989.
Статья представлена к публикации членом редколлегии А.В. Назиным.
Поступила в редакцию 13.07.2018
После доработки 05.09.2018
Принята к публикации 08.11.2018
61