Автоматика и телемеханика, № 12, 2019
Линейные системы
© 2019 г. Д.В. БАЛАНДИН, д-р физ.-мат. наук (dbalandin@yandex.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского),
Р.С. БИРЮКОВ, канд. физ.-мат. наук (biryukovrs@gmail.com),
М.М. КОГАН, д-р физ.-мат. наук (mkogan@nngasu.ru)
(Нижегородский государственный архитектурно-строительный университет)
МИНИМАКСНОЕ УПРАВЛЕНИЕ УКЛОНЕНИЯМИ ВЫХОДОВ
ЛИНЕЙНОЙ ДИСКРЕТНОЙ НЕСТАЦИОНАРНОЙ СИСТЕМЫ1
Показано, как можно синтезировать оптимальные на конечном го-
ризонте цифровые регуляторы для линейных нестационарных объектов
при неопределенных начальных условиях, находящихся под воздействи-
ем внешних возмущений. Квадрат оптимизируемого критерия, назван-
ного максимальным уклонением выхода, представляет собою точное га-
рантированное максимальное по времени значение квадрата евклидовой
нормы выхода системы, нормированное суммой квадратов евклидовых
норм возмущений и квадратичной формы начального состояния системы.
Максимальные уклонения выхода и приводящие к ним наихудшие возму-
щения и/или начальные условия, а также минимаксные управления, в
том числе и многокритериальные, минимизирущие максимальные укло-
нения нескольких выходов, находятся как решения задачи полуопреде-
ленного программирования. Получены необходимые и достаточные усло-
вия устойчивости и ограниченности системы на конечном интервале, поз-
воляющие синтезировать соответствующие законы управления.
Ключевые слова: линейная нестационарная дискретная система, макси-
мальное отклонение выхода, оптимальное управление, многокритериаль-
ная задача, оптимальная виброизоляция.
DOI: 10.1134/S0005231019120018
1. Введение
Анализ и синтез систем управления, функционирующих на конечном вре-
менном интервале, давно привлекает внимание специалистов. Особый инте-
рес здесь вызывают задачи, связанные с оптимизацией максимальных откло-
нений выходов системы и самого управления от их номинальных значений.
Обзор различных работ этого направления и соответствующие ссылки мож-
но найти в статьях [1, 2], в которых синтезируются управления максималь-
ными отклонениями выходов линейных нестационарных систем в непрерыв-
ном времени на конечном горизонте. Что касается изучения максимальных
отклонений в дискретных системах, то в [3] были получены условия устой-
чивости и стабилизации линейной обратной связью на конечном горизонте,
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проекты №№ 18-41-520002, 19-01-00289).
3
в [4, 5] - условия ограниченности при действии возмущения, генерируемо-
го заданной системой, в [6] осуществляется синтез обратных связей по вы-
ходу, обеспечивающих устойчивость на конечном горизонте, в [7] получены
достаточные условия устойчивости и ограниченности на конечном горизонте
неопределенных дискретных систем. В [8] для дискретных систем с нулевы-
ми начальными условиями был получен оптимальный регулятор по выходу,
минимизирующий максимальное по времени значение евклидовой нормы вы-
хода при действии возмущения из класса l2 на бесконечном горизонте, реа-
лизация которого требует решения уравнения Риккати и задачи выпуклого
программирования, а в [9, 10] для дискретных систем были синтезированы
законы управления, минимизирующие верхние оценки всплесков, вызванных
неизвестным начальным возмущением. Таким образом, несмотря на многооб-
разие работ по этой теме, здесь отсутствуют точные характеристики макси-
мальных отклонений выхода при наличии обоих факторов: неопределенных
начальных условий и внешнего возмущения.
Данная работа идейно следует [1, 2], однако использует другой матема-
тический аппарат. Введены понятия максимальных уклонений выходов ли-
нейных дискретных нестационарных систем при внешнем и/или начальном
возмущениях и получены их характеризации в терминах решений нестацио-
нарных уравнений Ляпунова или в терминах решений задач полуопределен-
ного программирования. Установлено соответствие между понятиями устой-
чивости и ограниченности линейной нестационарной системы на конечном
интервале и максимальными уклонениями ее определенного выхода. Введе-
ны альтернативные понятия устойчивости и ограниченности системы на ко-
нечном интервале и получены соответствующие необходимые и достаточные
условия. Для стационарных систем при нулевых начальных условиях макси-
мальное уклонение выхода на конечном интервале, вызванное внешним огра-
ниченным в классе l2 возмущением, оказывается монотонно возрастающей и
ограниченной сверху функцией длины интервала, что позволяет определить
в этом случае максимальное уклонение на бесконечном горизонте и характе-
ризовать его в терминах решения алгебраического уравнения Ляпунова. По-
лученные характеризации максимальных уклонений выражаются в терминах
линейных матричных неравенств, что позволяет синтезировать оптимальные
законы управления, в том числе и многокритериальные.
2. Максимальные уклонения на конечном горизонте
при начальном и/или внешнем возмущениях
Рассмотрим линейную дискретную нестационарную систему
xt+1 = Atxt + Btvt,
(2.1)
zt = Ct xt, t = t0,t0 + 1,... ,t0 + N0, N0 ≥ 1,
где xt - состояние, zt - выход, vt - внешнее возмущение. Определим макси-
мальное уклонение выхода при начальном и внешнем возмущениях на вре-
4
менном горизонте [t0, t0 + N0] как
max
|zt|
t=t0,..., t0+N0
(2.2)
J0,v =
max
(
)1/2 ,
xt0,vt0,...,vt0+N0-1
∑
xTt
R-1xt0
+
|vi|2
0
i=t0
где R = RT > 0 - весовая матрица и знаменатель не обращается в ноль. Так
как
|zt|
J0,v =
max
max
(
)1/2 ,
t=t0,..., t0+N0
xt0,vt0,...,vt0+N0-1
∑
xTt
R-1xt0
+
|vi|2
0
i=t0
а выход zt определяется только возмущениями vt0 , . . . , vt-1, то
|zt0+N |
(2.3)
J0,v = max
max
(
)1/2 ,
N=0,..., N0
xt0,vt0,...,vt0+N0-1
∑
xTt
R-1xt0
+
|vi|2
0
i=t0
т.е. максимальное уклонение на горизонте [t0, t0 + N0] равно максимуму из
максимальных относительных значений модуля выхода на концах горизонтов
[t0, t0 + N] по всем N = 0, . . . , N0.
Для нахождения этой величины запишем решение уравнения (2.1) в виде
∑
xt = Φ(t,t0)xt0 +
Φ(t, i + 1)Bivi, t ≥ t0 + 1,
i=t0
где переходная матрица
{
At-1At-2 ··· At0 , t ≥ t0 + 1,
Φ(t, t0) =
I, t=t0
является решением разностного уравнения
(2.4)
Φ(t + 1, t0) = AtΦ(t, t0), t ≥ t0.
Выход может быть представлен как
∑
zt = CtΦ(t,t0)xt0 +
G(t, i)vi,
i=t0
где G(t, i) = CtΦ(t, i + 1)Bi, i = t0, . . . , t - 1 - матричная импульсная переход-
ная функция системы.
5
Теорема 2.1. Максимальное уклонение выхода при начальном и внеш-
нем возмущениях в системе (2.1) на заданном горизонте [t0, t0 + N0] нахо-
дится как
(2.5)
J0,v =
max λ1/2max(CtPtCTt),
t=t0,..., t0+N0
где λmax(·) обозначает максимальное собственное значение соответствую-
щей матрицы, Pt = PTt ≥ 0 - решение уравнения
(2.6)
Pt+1 = AtPtATt + BtBTt
с начальным условием Pt0 = R. Если максимальное значение J0,v = γ∗ до-
стигается при t = t∗, то наихудшие начальное состояние и внешнее возму-
щение определяются как
x∗t
= γ-1∗R1/2ΦT(t∗,t0)CTte∗, e∗ = emax(Ct∗ Pt∗ CTt
),
0
∗
∗
(2.7)
v∗t = γ-1∗BTtΦT(t∗,t + 1)CTte∗, t = t0,... ,t∗ - 1,
∗
где emax(·) обозначает нормированный собственный вектор, отвечающий
максимальному собственному значению соответствующей матрицы.
Доказательства этого и последующих утверждений содержатся в Прило-
жении. Заметим, что внешнее возмущение на интервале [t∗, t0 + N0] не влияет
на максимальное уклонение на всем интервале [t0, t0 + N0]: большие значения
внешнего возмущения на интервале [t∗, t0 + N0], конечно, вызовут большие
значения выхода, но максимальное уклонение выхода, определенное в (2.2),
не превысит величину γ∗.
Теорема 2.2. Максимальное уклонение выхода при начальном и внеш-
нем возмущениях на горизонте [t0, t0 + N0] находится в результате реше-
ния задачи полуопределенного программирования
J20,v = min γ2 :
⎛
⎞
Yt
∗
∗
(
)
Yt
∗
⎜
⎟
⎝ AtYt Yt+1 ∗
⎠ ≥ 0,
≥ 0, Yt0 ≥ R,
(2.8)
CtYt γ2I
0
BTt I
(
)
Y
t0+N0
∗
t = t0,...,t0 + N0 - 1,
≥0
Ct0+N0 Yt0+N0
γ2I
относительно неизвестных Yt0+1,... ,Yt0+N0 .
Заметим, что минимум в задаче (2.8) достигается не обязательно при
Yt = Pt, t = t0 + 1,... ,t0 + N0, но в любом случае он равен соответствующему
максимальному уклонению выхода.
6
В частном случае, когда начальное состояние нулевое, максимальное укло-
нение выхода при внешнем возмущении определяется как
max
|zt|
t=t0,..., t0+N0
Jv =
max
(
)1/2 =
vt0,...,vt0+N0-1 t0+∑-1
|vi|2
i=t0
(2.9)
|zt0+N |
= max
max
(
)1/2 .
N=1,..., N0
vt0,...,vt0+N-1 t0 ∑-1
|vi|2
i=t0
Так как в этом случае xt0 = 0, то
∑
∑
G(t, i)vi,
)
|vt|2,
zt0+N =
|zt0+N |2 ≤ λmax(Ct0+N Pt0+N
t0+N
i=t0
t=t0
где матрица
∑
Pt0+N =
Φ(t0 + N, i + 1)BiBTiΦT(t0 + N, i + 1)
i=t0
является решением разностного уравнения
(2.10)
Pt+1 = AtPtATt + BtBTt, Pt0
= 0.
Таким образом, максимальное уклонение и наихудшее внешнее возмущение
при нулевых начальных условиях определяются как в (2.5) и (2.7) при Pt0 = 0
и находятся согласно процедуре (2.8) при Yt0 ≥ 0.
В другом частном случае, когда внешнее возмущение отсутствует, а на-
чальное состояние неизвестно, задачу нахождения максимального уклонения
выхода принято называть задачей о всплеске. Максимальное уклонение при
начальном возмущении определяется как
max
|zt|
t=t0,..., t0+N0
|zt0+N |
(2.11)
J0 = max
= max
max
N=0,..., N0
xt0=0 (xt0 R-1xt0 )1/2
xt0=0 (xt0 R-1xt0 )1/2
В этом случае
zt0+N = Ct0+NΦ(t0 + N,t0)xt0 ,
)xTt
R-1xt0 ,
|zt0+N|2 ≤ λmax(Ct0+NPt0+N
t0+N
0
где матрица
Pt0+N = Φ(t0 + N,t0)RΦT(t0 + N,t0)
7
является решением разностного уравнения
(2.12)
Pt+1 = AtPtATt, Pt0 = R, t = t0,... ,t0
+ N - 1.
Таким образом, максимальный всплеск на горизонте [t0, t0 +N0] определяется
как
J0 = max λ1/2max(Ct0+NPt0+N
),
t0+N
N=0,..., N0
где Pt0+N =
≥ 0 - решение уравнения (2.12), и находится согласно про-
t0+N
цедуре (2.8), в которой следует положить Bt ≡ 0. Если максимальное значение
J0 = γ∗ достигается при t = t∗, то наихудшие начальное состояние определя-
ется как
(2.13)
x∗t
= γ-1∗RΦT(t∗,t0)CTte∗, e∗ = emax(Ct∗Pt∗ CTt).
0
∗
∗
Максимальное уклонение выхода может пониматься не только как макси-
мальное по времени относительное значение нормы вектора выхода, но и в бо-
лее широком смысле как максимум из максимальных по времени относитель-
ных значений норм векторов, составляющих в совокупности вектор выхода.
Это позволяет рассматривать функционалы, характеризующие максималь-
ные значения из максимальных отклонений нескольких векторных выходов
(см. пример в разделе 6). А именно, рассмотрим систему
xt+1 = Atxt + Btvt,
(2.14)
zt = col (z(1)t,... ,z(m)t), z(i)t = C(i)txt, i = 1,... ,m,
комбинированный выход которой состоит из m векторов z(i)t ∈ Rni . Макси-
мальное уклонение выхода этой системы определим как
max
max
|z(i)t|
t=t0,..., t0+N0
i=1,..., m
(2.15)
J0,v =
max
(
)1/2 .
xt0,vt0,...,vt0+N0-1
∑
xTt
R-1xt0
+
|vi|2
0
i=t0
Ясно, что при m = 1 это определение переходит в (2.2). Нетрудно также ви-
деть, что для комбинированного выхода
J0,v = max
J(i)0,v,
i=1,..., m
где J(i)0,v - максимальное уклонение выхода z(i)t, определенное в (2.2). Из тео-
ремы 2.1 непосредственно следует, что в случае комбинированного выхода
(
)
(2.16)
J0,v = max
max λ1/2max C(i)tPtC(i)T
,
t
i=1,..., m
t=t0,..., t0+N0
8
где матрица Pt есть решение уравнения (2.6). В частном случае zi могут быть
компонентами вектора z и тогда
(
)
J0,v = max
max d1/2max C(i)tPtC(i)T
,
t
i=1,..., m
t=t0,..., t0+N0
где dmax(·) обозначает максимальный диагональный элемент соответствую-
щей матрицы.
3. Максимальное уклонение выхода стационарной системы при внешнем
возмущении на конечном и бесконечном горизонтах
Покажем, что для стационарной системы (2.1) с нулевыми начальными
условиями при
∑
At ≡ A, Bt ≡ B, Ct ≡ C, t0 = 0, zt = Gt-ivi,
i=0
{
CAk-1B, k > 0,
Gk =
0, k ≤ 0
можно определить и вычислить максимальное уклонение при внешнем воз-
мущении на бесконечном горизонте. Действительно, в этом случае решение
матричного уравнения (2.10), имеющее вид
∑
Pt = At-1-iBBT(At-1-i)T,
i=0
монотонно не убывает, т.е. Pt+1 ≥ Pt. Следовательно,
max λ1/2max(CPN CT) = λ1/2max(CPN0 CT),
N=1,..., N0
т.е. для стационарных систем максимальное уклонение на конечном горизон-
те при внешнем возмущении и нулевом начальном состоянии всегда достига-
ется на конце горизонта при N = N0.
Теорема 3.1. Максимальное уклонение выхода при внешнем возмуще-
нии в стационарной системе на горизонте [0,N0] определяется формулой
Jv = λm
ax(CN0 PN0 CN0 ), где PN0 - решение уравнения (2.10), и вычисляется
как
J2v = min γ2 :
⎛
⎞
Yt
∗
∗
(
)
(3.1)
⎜
⎟
YN0
∗
⎝AYt Yt+1 ∗⎠≥0, Y0≥0, t=0,...,N0-1,
≥ 0.
CN0YN0
γ2I
0
BT I
9
Определим максимальное уклонение выхода устойчивой стационарной си-
стемы при внешнем возмущении на бесконечном горизонте
sup|zt|
t≥0
(3.2)
J(∞)v = max
(
)1/2 .
{vt}
∑ |vi|2
i=0
Теорема 3.2. Максимальное уклонение выхода при внешнем возмуще-
нии в устойчивой стационарной системе (2.1) на бесконечном горизонте
равно
J(∞)v = λmax(CP∗CT),
где P∗ = PT∗ ≥ 0 - грамиан управляемости, являющийся решением уравнения
(3.3)
P = APAT + BBT.
Следствие 3.1. Максимальное уклонение при внешнем возмущении на
бесконечном горизонте находится как решение задачи полуопределенного
программирования:
J(∞)v = min γ2 :
⎛
⎞
Y
∗
∗
(
)
(3.4)
Y
∗
⎝AYY
∗
⎠≥0,
≥ 0.
CY γ2I
0
BT I
Отметим, что максимальное уклонение выхода устойчивой стационарной
системы при нулевом начальном состоянии и внешнем возмущении на бес-
конечном горизонте является, по существу, одним из вариантов обобщен-
ной H2-нормы, введенной в [11] для непрерывных систем, а понятие мак-
симального уклонения комбинированного выхода в этом случае совпадает с
понятием обобщенной H2-нормы, данным в [12, 13]. Из доказательства тео-
ремы 3.2, которое использует методы оценки соответствующей операторной
нормы из [14], следует, что наихудшее возмущение на бесконечном горизонте
является “предельным” для наихудших возмущений на горизонте длины N,
когда N неограниченно возрастает.
4. Синтез законов управления максимальными уклонениями
4.1. Оптимальное управление максимальным уклонением
Перейдем к синтезу оптимальных законов управления, которые обеспе-
чивают минимальное значение максимальному уклонению целевого выхо-
да системы. Вначале заметим, что соответствующая вариационная задача
управления является вырожденной даже в случае, когда управление непо-
средственно включено в целевой выход, и имеет бесконечно много решений.
10
Покажем, что синтез оптимального управления в виде линейной нестацио-
нарной обратной связи по состоянию может быть осуществлен на основе ха-
рактеризации максимального уклонения, данной в теореме 2.2 в терминах
линейных матричных неравенств.
Для объекта управления
xt+1 = Atxt + Btvt + Bu,tut,
(4.1)
zt = Ct xt + Dt ut, t = t0,t0 + 1,... ,t0 + N0
при законе управления вида ut = Θtxt максимальное уклонение выхода при
начальном и внешнем возмущениях согласно теореме 2.2 находится при ре-
шении задачи (2.8), в которой вместо матрицы At должна стоять матрица
замкнутой системы At + Bu,tΘt, а вместо Ct - матрица Ct + DtΘt. Вводя но-
вые переменные Zt = ΘtYt, приходим к следующему результату.
Теорема 4.1. Матрицы Θt закона управления, минимизирующего мак-
симальное уклонение выхода при внешнем и начальном возмущениях в за-
мкнутой системе на горизонте [t0,t0 + N0], находятся как Θt = ZtY-1t при
решении следующей задачи полуопределенного программирования:
min γ2 :
⎛
⎞
Yt
∗
∗
(
)
⎜
⎟
Yt
∗
⎝AtYt + Bu, tZt Yt+1 ∗
⎠≥0,
≥ 0, Yt0 ≥ R,
(4.2)
CtYt + DtZt γ2I
0
BTt I
(
)
Y
t0+N0
∗
t = t0,...,t0 + N0 - 1,
≥ 0.
Ct0+N0 Yt0+N0 + Dt0+N0 Zt0+N0 γ2I
Аналогичным образом синтезируются законы управления, обеспечиваю-
щие минимальное значение максимальному уклонению при внешнем возму-
щении или всплеску при начальном возмущении.
4.2. Оптимальные по Парето управления максимальными уклонениями
нескольких выходов
Рассмотрим теперь многокритериальную задачу управления максималь-
ными уклонениями нескольких целевых выходов системы
xt+1 = Atxt + Btvt + Bu,tut, t = t0,... ,t0 + N0,
(4.3)
z(i)t = C(i)t xt + D(i)tut, i = 1,... ,m,
где z(i)t, i = 1, . . . , m - целевые выходы. Пусть J(i)0,v(Θt0+N0 ) - максимальноеt
0
уклонение i-го целевого выхода при внешнем и начальном возмущении для
этой системы, замкнутой обратной связью ut = Θtxt, t = t0, . . . , t0 + N0, где
Θt0+N0t0 обозначает набор матриц Θt0 ,... ,Θt0+N0 . Поставим задачу нахожде-
ния оптимальных по Парето параметров Θt0+N0 в многокритериальной зада-t
0
че
{
}
Θt0+N0=argmin
(4.4)
J(i)0,v(Θt0+N0 ), i = 1,... ,m
t0
t0
Θt0+N0
t0
11
Множество P = {Θt0+N0 } является оптимальным по Парето, если неравен-t
0
ства J(i)0,v(Θt0+N0t0 ) ≤
(Θt0+N0), i = 1,... ,m, в которых по меньшей мереt
0, v
0
одно является строгим, не выполняются для любого набора матриц Θt0+N0 .t
0
Одним из методов решения этой задачи является выбор скалярной целевой
функции
(4.5)
Jα(Θt0+N0t0 ) = max
J(i)0,v(Θt0+N0t0 )/αi,
i=1,..., m
где α = (α1, . . . , αm), αi > 0, i = 1, . . . , m, известной как свертка Гермейера
[15]. Необходимые условия оптимальности по Парето формулируются сле-
дующим образом.
Теорема 4.2 ([12]). Пусть (γ1,...,γm) - оптимальная по Парето точ-
ка в пространстве критериев и минимум целевой функции Jα(Θt0+N0)t
0
при αi = γi/maxk=1,...,m γk достигается в Θt0+N0t0 (α). Тогда Θt0+N0(α) ∈ P и0
J(i)0,v(Θt0+N0t0(α)) = γi, i = 1,... ,m.
Согласно (4.5) и теореме 2.1 свертка Гермейера в рассматриваемой много-
критериальной задаче имеет вид
max λ1/2max(C(i)tPtC(i)Tt)/αi,
(4.6)
Jα(Θt0+N0t0 ) = max
i=1,..., m
t0,..., t0+N0
где Pt = PTt ≥ 0 - решение уравнения (2.6) для замкнутой системы. Обраща-
ясь к (2.16), нетрудно видеть, что свертка Гермейера (4.6) является макси-
мальным уклонением комбинированного выхода замкнутой системы
xt+1 = (At + Bu,tΘt)xt + Btvt, t = t0,... ,t0 + N0,
(4.7)
zt = col(z(1)t,... ,z(m)t), z(i)t = α-1i(C(i)t + D(i)tΘt)xt, i = 1,... ,m.
Это непосредственно приводит к следующему результату.
Теорема 4.3. Оптимальные по Парето управления в многокритериаль-
ной задаче (4.4) минимизации максимальных уклонений выходов систе-
мы (4.3) суть оптимальные управления по отношению к максимальному
уклонению комбинированного выхода системы (4.7), состоящего из пара-
метризованных выходов системы (4.3) при всех αi, i = 1,... ,m.
Заметим, что, вообще говоря, не всякое оптимальное управление по отно-
шению к максимальному уклонению комбинированного выхода системы бу-
дет оптимальным по Парето. Матрицы параметров оптимальных по Парето
регуляторов могут быть найдены, если вычисление свертки Гермейера осу-
ществлять с помощью задачи полуопределенного программирования подобно
тому, как это было сделано выше для вычисления максимального уклонения
выхода при внешнем и начальном возмущениях. А именно, из (4.6) следует,
что матрицы параметров оптимальных по Парето регуляторов находятся как
12
Θt = ZtY-1y при решении задачи
min γ2 :
⎛
⎞
Yt
∗
∗
(
)
Yt
∗
⎜
⎟
⎝AtYt + Bu, tZt Yt+1 ∗
⎠≥0,
≥ 0, Yt0 ≥ R,
C(i)tTt + D(i)tZt γ2α2iI
0
BTt I
(4.8)
i = 1,...,m, t = t0,...,t0 + N0 - 1,
(
)
Yt0+N0
∗
≥ 0, i = 1, . . . , m.
C(i)t
Zt0+N0
γ2α2iI
0+N0
Yt0+N0 + D(i)t0+N0
Аналогичным образом решаются и многокритериальные задачи управления
максимальными уклонениями при внешнем возмущении и нулевых началь-
ных условиях и при неизвестном начальном состоянии невозмущенной систе-
мы. Для стационарных систем на бесконечном горизонте имеет место сле-
дующее утверждение.
Теорема 4.4. Оптимальные по Парето стационарные законы управле-
ния в многокритериальной задаче минимизации максимальных уклонений
стационарной системы (4.3) при нулевом начальном состоянии и внешнем
возмущении на бесконечном горизонте имеют параметры Θα = ZαY-1α, где
Yα = YTα и Zα - решения задачи полуопределенного программирования:
J(∞)v = min γ2 :
⎛
⎞
Y
∗
∗
(
)
(4.9)
Y
∗
⎜
⎟
⎝AY + BuZ Y
∗⎠≥0,
≥ 0, i = 1, . . . , m.
C(i)Y +D(i)Z γ2α2iI
0
BT I
Заметим, что в многокритериальных задачах одним из целевых выходов
целесообразно выбирать управление, чтобы обеспечить компромисс между
максимальными уклонениями некоторых выходов и максимальным уклоне-
нием самого управления.
5. Необходимые и достаточные условия устойчивости и ограниченности
на конечном горизонте
По аналогии с непрерывными системами назовем дискретную систему
(5.1)
xt+1 = Atxt + Btvt, t = t0,t0 + 1,... ,t0 + N0, N0
≥1
ограниченной на конечном интервале [t0, t0 + N0] при ненулевых начальных
условиях и внешнем возмущении из класса l2 для заданных положительных
параметров c1, c2, d (c1 < c2) и положительно определенной матричной функ-
ции Γt = ΓTt, если верна импликация
(5.2)
xTtΓt0 xt0 ≤ c1 ⇒ xTtΓtxt < c2
∀t ∈ [t0,t0 + N0],
∀v : ∥v∥22
≤ d.
0
13
Ограниченность дискретной системы при внешнем возмущении, порождае-
мом заданной линейной экзогенной системой, была определена и изучена в
[4, 5]. Выясним условия ограниченности системы в смысле определения (5.2).
Если для максимального уклонения выхода zt = Γ1/2txt при выборе R-1 =
= Γt0 справедливо неравенство
T
max x
t
Γtxt
t=t0,..., t0+N0
c2
(5.3)
J20,v =
max
<
,
xt0,vt0,...,vt0+N0-1
∑
c1 + d
xTtΓt0 xt0 +
|vi|2
0
i=t0
то система (5.1) ограничена для заданных c1, c2, d и Γt. С учетом тео-
рем 2.1 или 2.2 условие (5.3) формулируется в терминах решений разност-
ных матричных уравнений или неравенств. Однако выполнение неравен-
ства (5.3) не является необходимым для ограниченности системы, так как
из J20,v ≥ c2/(c1 + d) при xTtΓt0 xt0 ≤ c1 и ∥v∥22 ≤ d не следует, вообще гово-
0
ря, неравенство xTtΓtxt ≥ c2, т.е. система может оставаться ограниченной в
смысле определения (5.2).
Модифицируем определение (5.2) и скажем, что система (5.1) ограничена
на конечном интервале времени для заданных положительных параметров
s1, s2 (s1 ≤ s2) и положительно определенной матричной функции Γt, если
верна импликация
(5.4)
xTtΓt0 xt0 + ∥v∥22 ≤ s1 ⇒ xTtΓtxt ≤ s2
∀t ∈ [t0,t0 + N0
].
0
Необходимые и достаточные условия ограниченности системы на конечном
интервале в смысле определения (5.4) формулируются следующим образом.
Теорема 5.1. Следующие утверждения являются эквивалентными.
(a) Система (5.1) является ограниченной в смысле определения (5.4) на
конечном интервале [t0,t0 + N0] для заданных s1, s2 (s1 ≤ s2) и Γt > 0.
(b) Максимальное уклонение выхода zt = Γ1/2txt при R-1 = Γt0 удовлетво-
ряет неравенству J20,v ≤ s2/s1.
(c) Для решения Pt уравнения (2.6) при Pt0 = Γ-1 выполнено условиеt
0
(
)
(5.5)
λmax Γ1/2tPtΓ1/2
≤ s2/s1
∀t ∈ [t0,t0 + N0
].
t
(d) Линейные матричные неравенства
⎛
⎞
Yt
∗
∗
⎜
⎟
⎝ AtYt Yt+1 ∗
⎠ ≥ 0, t = t0,...,t0 + N0 - 1, Yt0 ≥ Γŧ1,0
(5.6)
0
BTt I
Yt ≤ (s2/s1)Γ-1,
t = t0 + 1,... ,t0 + N0
t
являются разрешимыми.
14
Согласно [3, 6] система (5.1) при отсутствии внешнего возмущения называ-
ется устойчивой на конечном интервале для заданных ε иR > 0, если верна
импликация
(5.7)
xTt
Rxt0 ≤ 1 ⇒ xTt Rxt < ε2
∀t ∈ [t0,t0 + N0
].
0
Достаточные условия устойчивости системы на конечном интервале, полу-
ченные там же, состоят в выполнении следующих неравенств:
ATtXt+1At - Xt < 0, Xt ≥R, t = t0,... ,t0 + N0 - 1,
(5.8)
Xt0+N0 ≥R, Xt0 < ε2 R.
Модифицируем данное определение с целью получения неконсервативных
условий. Систему (5.1) при отсутствии внешнего возмущения назовем устой-
чивой на конечном интервале для заданных ε иR, если верна импликация
(5.9)
xTt
Rxt0 ≤ 1 ⇒ xTt Rxt ≤ ε2
∀t ∈ [t0,t0 + N0
].
0
Разница между этими определениями состоит в замене строгого неравенства
в одном на нестрогое неравенство в другом. Согласно теореме 5.1 при Bt ≡ 0,
s1 = 1, s2 = ε2, Γt ≡R необходимые и достаточные условия устойчивости си-
стемы на конечном интервале в смысле определения (5.9) состоят в выпол-
нении неравенств
AtYtATt - Yt+1 ≤ 0, Yt ≤ ε2 R-1, t = t0,... ,t0 + N0 - 1,
(5.10)
Yt0+N0 ≤ ε2 R-1, Yt0 ≥R-1.
Умножая первое неравенство в (5.10) слева и справа на Y-1t+1, обозначая Xt =
= ε2Y -1t и применяя лемму Шура, приходим к неравенствам
ATtXt+1At - Xt ≤ 0, Xt ≥R, t = t0,... ,t0 + N0 - 1,
(5.11)
Xt0+N0 ≥R, Xt0 ≤ ε2 R,
которые также, как (5.10), выражают необходимые и достаточные условия
устойчивости системы на конечном интервале в предложенной модифика-
ции. Сравнение (5.11) и (5.8) выявляет лишь “небольшое” отличие: в (5.11)
все неравенства являются нестрогими, тогда как в (5.8) два из них строгие.
Таким образом, переход от строгого неравенства к нестрогому в определении
устойчивости на конечном интервале позволяет сформулировать конструк-
тивные необходимые и достаточные условия.
Замечание 1. Если импликация (5.4) верна при xt0 = 0, то система (5.1)
при нулевом начальном состоянии называется устойчивой по входу и выходу
на конечном интервале для заданных s1, s2 и Γt > 0. Из теоремы 5.1 следует,
что необходимые и достаточные условия того, что система обладает данным
свойством, выражаются неравенствами (5.5) при Pt0 = 0 или неравенства-
ми (5.6), из которых исключено неравенство Yt0 ≥ Γ-1.t
0
15
Условия ограниченности системы на конечном интервале, сформулирован-
ные в теореме 5.1, п. (d), позволяют синтезировать законы управления, обес-
печивающие устойчивость, устойчивость по входу и выходу и ограниченность
системы на конечном интервале при заданных значениях параметров s1, s2
и матричной функции Γt.
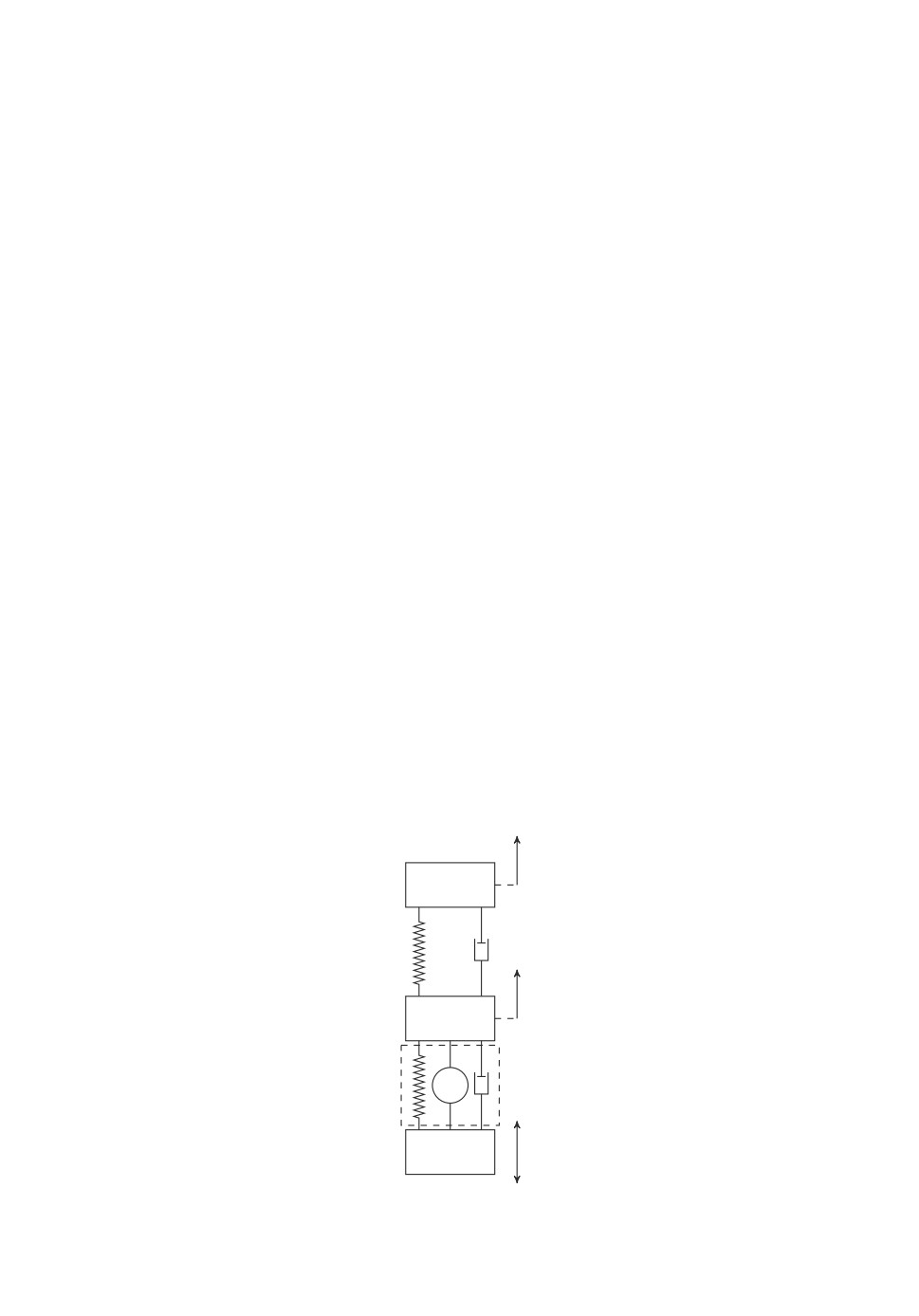
6. Синтез оптимального виброизолятора
Рассмотрим механическую систему с двумя степенями свободы, показан-
ную на рис. 1 и представляющую собой упругий объект, который модели-
руется двумя материальными точками 2 и 3, связанными между собой ли-
нейными упругим и диссипативным элементами; этот упругий объект связан
такими же линейными упругим и диссипативным элементами и управляемым
элементом (называемым далее виброизолятором) с другим телом 1, который
моделирует подвижное основание. Динамика данной механической системы
(в безразмерных переменных и параметрах) описывается дифференциальны-
ми уравнениями
x1 = -2x1 + x2 - 2β x1 + β x2 + u + v,
x2 = x1 - x2 + β x1 - β x2 + v,
(6.1)
x1(0) = x10, x2(0) = x20,
x1(0) = x30,
x2(0) = x40,
где x1 и x2 - координаты материальных точек 2 и 3 относительно подвижно-
го основания, u - усилие, создаваемое виброизолятором при его деформации
(т.е. при смещении точки 2 относительно точки 1), v - с точностью до знака
ускорение основания (материальной точки 1), β - заданный положительный
параметр демпфирования. Задача виброизоляции состоит в поиске управле-
ния u = θ1(t)x1 + θ2(t)x2 + θ3(t) x1 + θ4(t) x2, определяющего характеристику
x2
3
x1
2
u
4
1
v
Рис. 1. Схематическое изображение системы активной виброзащиты.
16
40
1,
2
3,
4
30
20
10
0
10
20
30
40
50
1
2
3
4
2
4
6
8
10
12
14
16
18
20
t
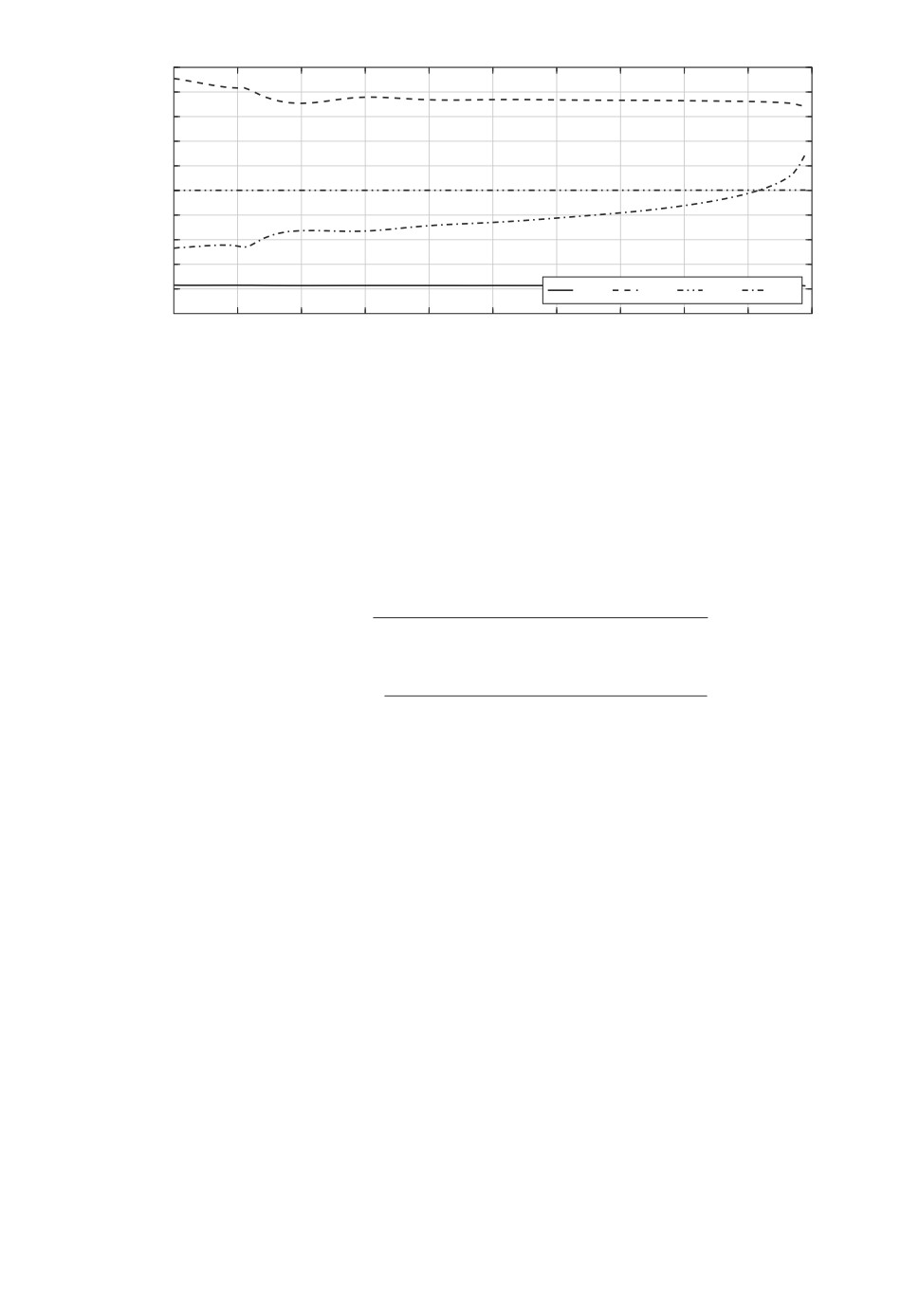
Рис. 2. Графики зависимостей от времени оптимальных по критерию J1 ко-
эффициентов обратной связи.
виброизолятора и обеспечивающего требуемое качество переходных процес-
сов в данной механической системе.
Для количественной оценки переходных процессов на конечном интервале
времени [0, T ] введем два показателя
(t)|}
supt∈[0,T] max{|x1(t)|,|x2(t)-x1
J1[Θ(t)]= sup
,
x0, v∈L2
(xT0R-1x0 + ∥v∥22)1/2
supt∈[0,T] | - x1(t) - β x1(t) + u(t)|
J2[Θ(t)] = sup
,
x0, v∈L2
(xT0R-1x0 + ∥v∥22)1/2
где x0 = (x10 x20 x30 x40)T, Θ(t) = (θ1(t) θ2(t)θ3(t) θ4(t))T, R - заданная по-
ложительно определенная матрица,
∫T
∥v∥22 =
|v(t)|2dt.
0
Первый показатель характеризует максимальную деформацию механической
системы, а второй - максимальную силу, противодействующую смещению
упругого объекта относительно основания. Желательно, чтобы оба эти пока-
зателя были как можно меньше.
Проведем далее на отрезке [0, T ] дискретизацию данной системы и ука-
занных показателей J1 и J2 с шагом дискретизации h и получим дискрет-
ную систему 4-го порядка вида (2.14) с показателями в форме максимальных
уклонений вида (2.15). Зададим следующие числовые значения параметров:
h = 0,2, T = 20, β = 0,1, R = blockdiag(0,1I2,I2). Сначала рассмотрим задачу
оптимального управления, в которой минимизируется показатель J1. В ре-
зультате применения изложенной выше теории получены оптимальные коэф-
фициенты θ1(t), θ2(t), θ3(t), θ4(t), графики которых представлены на рис. 2,
17
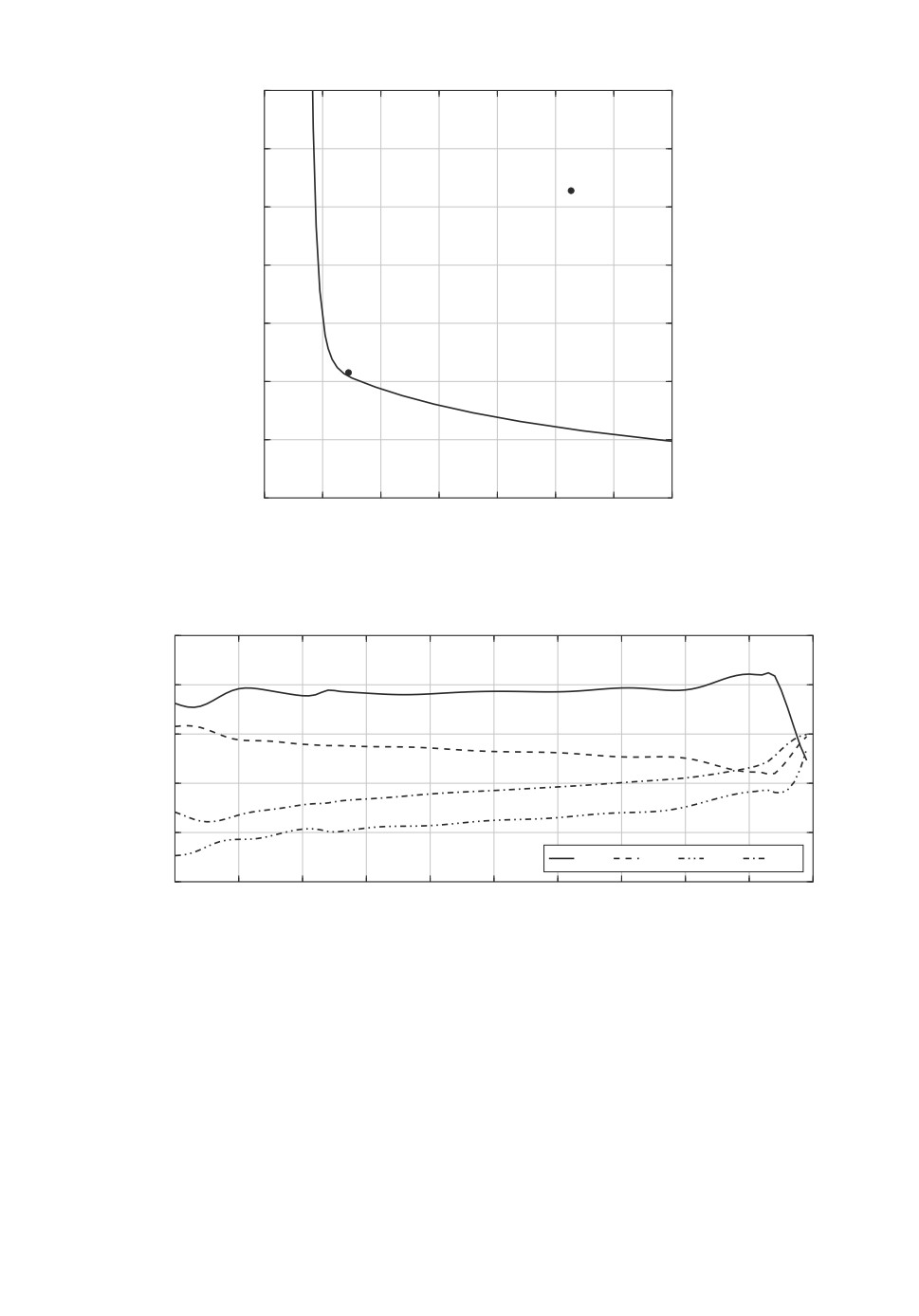
J2
4,0
3,5
A
3,0
2,5
2,0
B
1,5
1,0
3,5
3,0
2,5
2,0
0,5
1,5
1,0
4,0
J1
Рис. 3. Парето оптимальный фронт.
1,0
1,
2
3,
4 0,5
0
0,5
1,0
1
2
3
4
1,5
2
4
6
8
10
12
14
16
18
20
t
Рис. 4. Графики зависимостей от времени оптимальных по Парето коэффи-
циентов обратной связи.
при этом J1 = 0,847, а J2 = 152,56. Таким образом, минимизация только од-
ного показателя (J1) приводит к очень большому значению другого (J2), по-
этому целесообразно рассмотреть далее двухкритериальную задачу. Резуль-
таты решения двухкритериальной задачи представлены на рис. 3 в виде кри-
вой (Парето оптимальный фронт) на плоскости (J1, J2). На этом же рисунке
указана точка A, которая соответствует случаю отсутствия управления (т.е.
u = 0). Точке с координатами (1,183;
1,568), принадлежащей указанной кри-
вой, на рис. 3 соответствуют оптимальные нестационарные параметры Θ(t),
18
графики которых представлены на рис. 4. Если усреднить значения этих ко-
эффициентов обратной связи по времени, то получатся постоянные коэффи-
циенты Θ = (0,428; -0,168; -0,868; -0,564), которым на рис. 3 соответствует
точка B с координатами (1,222;
1,576). Таким образом, выбор стационар-
ного регулятора (виброизолятора) с указанными параметрами обеспечивает
приемлемый компромисс между выбранными показателями.
7. Заключение
В статье показано, что максимальные уклонения выхода линейной неста-
ционарной динамической системы на конечном временном горизонте при
внешнем и/или начальном возмущениях можно характеризовать в терминах
решений линейных матричных неравенств. Это позволяет синтезировать оп-
тимальные по максимальным уклонениям нестационарные законы управле-
ния, в том числе и многокритериальные. Получены необходимые и достаточ-
ные условия устойчивости и ограниченности системы на конечном интервале,
позволяющие синтезировать соответствующие законы управления. Установ-
лено, что максимальное уклонение выхода стационарной системы при нуле-
вом начальном состоянии и внешнем возмущении на бесконечном горизонте
и оптимальное по этому критерию управление могут быть найдены как ре-
шения линейных матричных неравенств. Приводятся результаты численных
экспериментов в задаче виброзащиты, которые показывают эффективность
предлагаемого подхода и, в частности, возможность синтеза субоптимального
управления в виде линейной стационарной обратной связи.
ПРИЛОЖЕНИЕ
Сначала приведем вспомогательное утверждение.
Лемма П.1. Нормированные собственные векторы матриц STS и SST,
отвечающие максимальным собственным значениям, связаны соотношени-
ем
(Π.1)
emax(STS) = λ-1/2max(SST)STemax(SST
),
где λmax(SST) = λmax(STS).
Доказательство леммы П.1. Так как
SSTemax(SST) = λmax(SST)emax(SST),
то, умножая обе части этого равенства слева на ST и нормируя вектор
STemax(SST), получим (Π.1).
Доказательство теоремы 2.1. Запишем выход системы (2.1) в виде
zt0+N = SNwN,
19
где
SN = (Ct0+NΦ(t0 + N,t0)R1/2 G(t0 +N,t0)··· G(t0 +N,t0 +N -1)),
⎛
⎞
R-1/2xt0
(Π.2)
⎜
⎟
vt0
⎜
⎟
wN =
⎝
···
⎠.
vt0+N-1
С учетом того, что λmax(STNSN) = λmax(SNSTN) и SNSTN = Ct0+NPt0+N
,
t0+N
получим
(
)
∑
) xTt
R-1xt0 +
|vt|2
,
|zt0+N |2 ≤ λmax(Ct0+N Pt0+N
t0+N
0
t=t0
где равенство достигается и
Pt0+N = Φ(t0 + N,t0)RΦT(t0 + N,t0) +
∑
+
Φ(t0 + N, i + 1)BiBTiΦT(t0 + N, i + 1).
i=t0
В силу (2.4) матрица Pt0+N является решением разностного уравнения (2.6).
Таким образом, учитывая (2.3), приходим к (2.5).
Пусть максимальное уклонение выхода происходит в момент t∗ = t0 + N∗.
Тогда zt0+N∗ = SN∗ wN∗ , где SN∗ и wN∗ определены в (Π.2) при N = N∗, а
wN∗ = emax(STN∗SN∗). С уче-
max{|zt0+N∗ |2 : |wN∗ | = 1} = γ∗ достигается при
том леммы П.1 получим
wN∗ = γ-1∗STN
emax(SN∗STN
)=γ-1∗STN
emax(Ct∗ Pt∗ CTt
),
∗
∗
∗
∗
что непосредственно приводит к (2.7).
Доказательство теоремы 2.2. Пусть в задаче (2.8) min γ2 = γ2∗.
Тогда матрицы Yt = YTt, t = t0, · · · , t0 + N0 удовлетворяют неравенствам
(Π.3)
Yt+1 ≥ AtYtATt + BtBTt, CtYtCTt ≤ γ2I, Yt0
≥ R.
Из (Π.3) следует, что соотношения
Yt+1 = AtYtATt + BtBTt + Qt, Yt0 ≥ R
выполняются при некоторых матрицах Qt = QTt ≥ 0. Тогда с учетом (2.6)
имеем
Yt+1 - Pt+1 = At(Yt - Pt)ATt + Qt, Yt0 - Pt0 ≥ 0.
Отсюда получим, что для всех t = t0, . . . , t0 + N0
∑
Yt - Pt = Φ(t,t0)(Yt0 - Pt0 )ΦT(t,t0) +
Φ(i, t0)QiΦT(i, t0) ≥ 0.
i=t0
20
Следовательно,
J20,v =
max
λmax(CtPtCTt) ≤
max λmax(CtYtCTt) ≤ γ2∗.
t=t0,..., t0+N0
t=t0,..., t0+N0
Если предположить, что J20,v = γ20 < γ2∗, то задача (2.8) при Yt = Pt, t = t0 +
+1, . . . , t0+N0 имеет решение γ20 < γ2∗, что противоречит условию min γ2 = γ2∗.
Доказательство теоремы
3.2. При неограниченном увеличении
длины горизонта, т.е. когда N0 → ∞, решение разностного уравнения
(Π.4)
Pt+1 = APtAT + BBT, P0
= 0,
∑∞
монотонно стремится к граммиану управляемости P∗ =
AiBBTAiT -
i∑
t-1
решению алгебраического уравнения
(3.3). Так как zt =
Gt-ivi и
i=0
λmax(SST) = λmax(STS), то верны следующие неравенства:
(
)
(
)
∑
∑
∑
∑
|zt|2 ≤ λmax
GiGi
|vi|2
≤λmax
GiGi
|vi|2,
i=0
i=0
i=0
i=0
∑
GiGi = CP∗CT.
i=0
∑∞
Отсюда следует, что supt≥0 |zt| ≤ λ∗/2(
|vi|2)1/2, где λ∗ = λmax(CP∗CT).
i=0
Осталось показать, что здесь имеет место равенство. Выбирая некоторое N,
определим возмущение
∑
vi = λ∗1/2GN-ie, e = emax(CP∗CT),
|e| = 1,
|vi|2 ≤ 1.
i=0
При этом возмущении имеем
∑
|zt| = max zTzt ≥ eTzt = λ∗1/2eT
Gt-iGN-ie,
|z|=1
i=0
и, значит, для любого N найдется возмущение, при котором
∑
∑
sup|zt| ≥ λ∗1/2 sup eT
Gt-iGN-ie = λ∗1/2
eT
GiGie.
t≥0
t≥0
i=0
i=0
Отсюда следует, что
∑
∑
sup|zt| ≥ λ∗1/2 sup eT
GiGie = λ∗1/2
eT
GiGie = λ∗/2,
t≥0
N>0
i=0
i=0
что и требовалось доказать.
21
Доказательство теоремы 5.1. Утверждение (a) → (b) докажем от
противного: пусть при выполнении (5.4) имеем J20,v > s2/s1. Так как
J20,v = s-11 max
max
xTtΓtxt > s2/s1,
xt0,v∈l2
t∈[t0,t0+N0]
где max берется по всем xTt
0
Γt0 xt0 + ∥v∥22 = s1, то maxt∈[t0,t0+N0] xtΓtxt > s2,
что противоречит (5.4). Утверждение (b) → (a) следует непосредственно из
неравенства
max
xTtΓtxt ≤ J20,v(xTtΓt0 xt0 + ∥v∥2) ≤ s2.
0
t
Утверждение (b) ↔ (c) следует из теоремы 2.1. Утверждение (c) ↔ (d) сле-
дует из теоремы 2.2.
СПИСОК ЛИТЕРАТУРЫ
1.
Balandin D.V., Biryukov R.S., Kogan M.M. Finite-Horizon Multi-Objective
Generalized H2 Control with Transients // Automatica. 2019. V. 106. No. 8. P. 27-34.
2.
Баландин Д.В., Бирюков Р.С., Коган М.М. Оптимальное управление макси-
мальными уклонениями выходов линейной нестационарной системы на конеч-
ном интервале времени // АиТ. 2019. № 10. C. 37-61.
Balandin D.V., Biryukov R.S., Kogan M.M. Optimal Control of Maximum Output
Deviations of a Linear Time-Varying System on a Finite Horizon // Autom. Remote
Control. 2019. V. 80. No. 10. P. 1783-1802.
3.
Amato F., Carbone M., Ariola M., Cosentino C. Finite-Time Stability of Discrete-
Time Systems // Proc. Amer. Control Conf. Boston, USA. 2004. P. 1440-1444.
4.
Amato F., Ariola M. Finite-Time Control of Discrete-Time Linear Systems // IEEE
Trans. Autom. Control. 2005. V. 50. No. 5. P. 724-729.
5.
Ichihara H., Katayama H. Necessary and Sufficient Conditions for Finite-Time
Boundedness of Linear Discrete-Time Systems // Proc. Joint 48th IEEE CDC
28th Chinese Control Conf., Shanghai, P.R. China. 2009. P. 3226-3231.
6.
Amato F., Ariola M., Cosentino C. Finite-time control of discrete-time linear
systems: Analysis and design conditions // Automatica. 2010. V. 46. P. 919-924.
7.
Kussaba H.T.M., Ishihara J.Y., Borges R.A. Finite time boundedness and stability
analysis of discrete time uncertain systems // Proc. 54th CDC Osaka, Japan. 2015.
P. 5972-5977.
8.
Wilson D.A., Nekoui M.A., Halikias G.D. An LQR weight selection approach to
the discrete generalized H2 control problem // Int. J. Control. 1998. V. 71. No. 1.
P. 93-101.
9.
Коган М.М., Кривдина Л.Н. Синтез многоцелевых линейных законов управ-
ления дискретными объектами при интегральных и фазовых ограничениях //
АиТ. 2011. № 7. С. 83-95.
Kogan M.M., Krivdina L.N. Synthesis of Multipurpose Linear Control Laws of
Discrete Objects under Integral and Phase Constraints // Autom. Remote Control.
2011. V. 72. No. 7. P. 1427-1439.
10.
Агиевич В.Н., Парсегов С.Э., Щербаков П.С. Верхние оценки всплеска в линей-
ных дискретных системах // АиТ. 2018. № 11. С. 32-46.
Ahiyevich U.M., Parsegov S.E., Shcherbakov P.S. Upper Bounds on Peaks in
Discrete-Time Linear Systems // Autom. Remote Control. 2018. V. 79. No. 11.
P. 1976-1988.
22
11. Wilson D.A. Convolution and Hankel Operator Norms for Linear Systems // IEEE
Trans. Autom. Control. 1989. V. 34. P. 94-97.
12. Баландин Д.В., Коган М.М. Оптимальное по Парето обобщенное H2-управление
и задачи виброзащиты // АиТ. 2017. № 8. С. 76-90.
Balandin D.V., Kogan M.M. Pareto Optimal Generalized H2-control and Vibro-
protection Problems // Autom. Remote Control. 2017. V. 78. No. 8. P. 1417-1429.
13. Balandin D.V., Kogan M.M. Multi-objective generalized H2 control // Automatica.
2019. V. 99. No. 1. P. 317-322.
14. Chellaboina V., Haddad W.M., Bernstein D.S., Wilson D.A. Induced Convolution
Operator Norms of Linear Dynamical Systems // Proc. Amer. Control Conf., San
Diego. 1999. P. 3805-3809.
15. Гермейер Ю.Б. Введение в теорию исследования операций. М.: Наука, 1971.
Статья представлена к публикации членом редколлегии А.П. Крищенко.
Поступила в редакцию 06.02.2019
После доработки 02.04.2019
Принята к публикации 25.04.2019
23