Автоматика и телемеханика, № 12, 2019
Стохастические системы
© 2019 г. Ю.Н. ГОРБУНОВ, д-р техн. наук (gorbunov@ms.ire.rssi.ru)
(Институт радиотехники и электроники им. В.А. Котельникова РАН, Москва)
СТОХАСТИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ ПЕЛЕНГА
В АДАПТИВНЫХ АНТЕННЫХ РЕШЕТКАХ С ГРУБЫМИ
ПРОСТРАНСТВЕННО-ВРЕМЕННЫМИ СТАТИСТИКАМИ
Анализируется построение системы обработки пространственно-вре-
менных сигналов в радиотехнической системе, учитывающей техниче-
ские ограничения при измерении пеленга. Заданная эффективность мо-
жет быть достигнута применением упрощенных процедур обработки
с использованием стохастической управляемой интерполяции пеленга.
Для реализации применяется обработка на базе усеченных (малоэле-
ментных) управляемых апертур антенных решеток и грубых («бинарно-
знаковых») робастных статистик сигнала. Предлагается нетрадиционный
подход, предполагающий в процессе цифровой обработки применять ме-
тод Монте-Карло с обратной связью: осуществлять рандомизацию и по-
этапное стохастическое управление положением фазового центра путем
последовательной активизации малого числа элементов при накоплении и
усреднении грубых отсчетов входного сигнала. Приводятся количествен-
ные результаты снижения инструментальных погрешностей измерения
пеленга.
Ключевые слова: стохастическая линеаризация, многоэтапное усреднение,
рандомизация, стохастическая радиолокация, метод Монте-Карло, схема
Бернулли, квазислучайные точки, инструментальные ошибки.
DOI: 10.1134/S0005231019120067
1. Введение
Системы адаптивной пространственно-временной (ПВ) обработки сигна-
лов находят широкое применение в информационной измерительной технике,
радиосвязи и радиолокации. Гибкость структуры обработки и формирования
сигналов обеспечивается применением цифровой ПВ обработки сигналов, фа-
зированных антенных решеток (ФАР) и цифровых сигнальных процессоров
(DSP).
Сложность построения системы в значительной степени определяется раз-
рядностью обрабатываемых сигналов. При параллельной обработке в ре-
альном времени (на регистровом и топологическом уровнях, в интерфей-
сах) разрядность напрямую определяет сложность построения аппаратуры
(АЦП аналого-цифровых преобразователей, фазовращателей, умножителей,
арифметико-логических устройств и т.п.). При последовательной обработке
с применением DSP техническая реализация упрощается, однако увеличива-
ется время обработки, снижается быстродействие системы.
103
В цифровых ФАР разрядность РЛ (радиолокационных данных), частоты
дискретизации, размеры ПВ окон должны быть минимальными, однако это
становится несовместимым с требованием высокой эффективности: растут
шумы квантования, боковые лепестки, проявляются стробоскопический и ин-
терференционные эффекты, нелинейности типа «зона нечувствительности»,
«люфт», «жесткое ограничение» и др. Компромисс между грубым квантова-
нием и необходимым усреднением (объемом усредняющей выборки) предла-
гается искать в применении метода Монте-Карло, основанном на вероятност-
ном моделировании с использованием грубых статистик [1].
В [2-4] исследованы вопросы анализа и синтеза адаптивных ФАР, осу-
ществляющих дискретизацию пространства, однако специальные разделы,
относящиеся к электронному управлению ФАР, повышению инструменталь-
ной точности измерения пеленга при использовании грубых статистик ни-
кем не исследовались. Несовершенства инструмента ограничивают потенци-
альную точность, а экстенсивный путь приводит к увеличению разрядно-
сти АЦП.
В последние годы развивается направление стохастической радиолокации
[5-8], где введено понятие «грубые статистики» (ГС), связанное с понятием
«грубые отсчеты» (ГО) так: «ГО + Р = ГС», где Р — рандомизация (зашум-
ление).
Технический прием Р — это искусственное введение случайности (стоха-
стичности, хаоса).
В развитие направления в [9] предложено повышать инструментальную
точность измерения пеленга применением Р-стохастической интерполяции
ГО. Измерение пеленга указанным способом (методом Монте-Карло) сводит
измерение пеленга к задаче оценки интерполирующей добавки Δx (дробной
части грубой шкалы) через измерение вероятности p = Δx/Δ, где Δ — эле-
мент грубой дискретности. Процедура измерения пеленга при Р близка к
известным процедурам стохастической аппроксимации (СА). Примером СА
является рекуррентная форма усреднения
∑
1
i-1
mi
(1)
Δ∗x(i) =
mℓ =
Δ∗x(i-1) +
Δ,
i
i
i
l=1
где μi = 1/0 — статистика исходов вероятности p = Δx/Δ; Δx(i) — ее i-я оцен-
ка на i-й итерации.
Расходимость гармонического ряда 1/i в известных процедурах СА [10, 11]
обеспечивает гарантированное движение к экстремуму целевой функции (min
среднеквадратической ошибки) при его поиске.
1.1. Постановка задачи
В рассматриваемой задаче пеленг θ = θ(α, β) для направления на источ-
ник излучения с азимута α и угла места β является постоянным. В плоско-
волновом приближении волна λ (длина), падающая на апертуру под углом
(пеленгом) θ от оси антенны, формирует поле, описываемое пространствен-
104
ными частотами:
2π
(2)
Ωα =
tg α cos θ;
λ
2π
(3)
Ωβ =
tg β cos θ.
λ
Для получения оценки Δx методом Монте-Карло в качестве исходной в [9]
использована бинарно-знаковая статистика отсчетов квадратурных состав-
ляющих сигнала, сохраняющих доплеровскую и угловую информацию. Для
рандомизированной обработки осуществлена модуляция положения фазово-
го центра путем последовательной активизации малого числа слабонаправ-
ленных элементов и усреднении ГО. В отличие от известного метода СА для
учета инженерных ограничений на каждой итерации будет использована гру-
бая статистика, а Р применена целенаправленно, что является особенностью
для направления стохастической радиолокации (Ст. РЛ) [14].
2. Стохастическая радиолокация: интерполяция пеленга
Обобщение работ по анализируемому направлению Ст. РЛ представлено
структурной схемой Ст. РЛ в [8], где дан соответствующий обзор. Здесь умест-
но указать такие имена ученых: В.Г. Гайсов, А.К. Микельсон, Р.Ф. Немиров-
ский, И.Я. Билинский, Э.И. Вологдин, Г.П. Вихров, В.С. Гладкий, В.Г. Стру-
гач, Ю.Г. Полляк, О.Н. Граничин, В.И. Фомин и ряд других, широко извест-
ных в кругу специалистов направлений, близких к Ст. РЛ. Следует отметить
также Ю.Б. Черняка, который применительно к обычной РЛ в 1970-х гг. ис-
следовал операцию «жесткого широкополосного ограничения — фильтрации»
и доказал ее линейные свойства — по существу, метода «бинарно-знаковой»
обработки сигналов в СВЧ приемнике, что не является парадоксом, а, ско-
рее, подтверждает существование некоторой закономерности, оформленной
в теорию Ст. РЛ.
Прототипом исследований возьмем работу [9], где рассмотрен подход адап-
тивного измерения пеленга θ, эквивалентный последовательной хаотической
модуляции положения фазового центра путем активизации малоэлементных
сегментов ФАР. В качестве элементарной ячейки использована схема двух-
точечного пространственного дискретного преобразования Фурье (ДПФ) —
схема «бабочка», реализующая на своих выходах «сумму — разность». На
каждую угловую координату α (2) и β (3) задействовано две схемы — один
сегмент включает четыре элемента ФАР («крест»). Состоятельность гру-
бых измерений пеленга θ сохраняет в пределе и трехэлементный сегмент —
«треугольник». Положение трех- и четырeхэлементного сегмента на апертуре
ФАР задается хаотично.
Синтезирование направленных (узких) лучей осуществляется последова-
тельно — когерентным суммированием отсчетов поля в пространстве на пе-
редачу и суммированием отсчетов на прием. В основе предложения лежит
идея многопозиционной радиолокации [12] и ее частного случая — много-
канальных РЛС (так называемые MIMO (multiple input — multiple output —
105
«много входов — много выходов») РЛС. В отличие от аналога — французской
РЛС RIAS (1984 г.), где все элементы передающей решетки излучали одно-
временно взаимноортогональные сигналы, смещенные по частоте, и поэтому,
как и в обычных ФАР, требовалась большая суммарная пиковая мощность
передатчика, в рассматриваемой системе сигнал формируется последователь-
но, в результате чего при сохранении энергии пиковая мощность передатчи-
ка уменьшается. Уменьшение энергии сигнала компенсируется увеличением
времени наблюдения.
В задаче измерения пеленга θ полный ресурс обрабатываемых ПВ отсче-
тов определяется размером выборки, равным N × K × M, где N — размер
временной выборки; K — число сегментов ФАР по оси x (для α), а M —
число сегментов ФАР по оси y (для β), K × M — размер результирующей
пространственной выборки полномасштабной решетки Рэйли. Прореженная
решетка в виде креста Миллса при M = K имеет размер 2K(M).
Сигналы РЛС на отдельных посылках, сформированные сегментом, соот-
ветствуют одному испытанию в методе Монте-Карло. Закон распределения
точек положения фазового центра устройством управления выбирается та-
ким, что распределение ошибок квантования пеленга будет равномерным, а
испытания независимы (схема Бернулли).
Применительно к задаче измерения пеленга в [9] приведена схема форми-
рования квадратурных составляющих сигнала. Аддитивная смесь x = s + c
полезного сигнала s и коррелированной по пространству активной помехи c
по каждой квадратуре на аналоговых выходах ФАР подвергается квантова-
нию с помощью идеально симметричного ограничителя, на выходе которого
по каждому i-му отсчету имеем знаковую статистику xi = sign{xi}Δ = μiΔ,
причем μi = 1 при xi > 0 и μi = -1 при xi ≤ 0 (Δ — масштабный коэффи-
циент).
С целью стохастической линеаризации нелинейной характеристики огра-
ничителя во входную смесь добавляется искусственный шум ξ, в результате
на выходе АЦП имеем СВ
{
1, с вероятностью p = 2-1 + xi(2Δ)1;
(4)
μi =
-1, с вероятностью q = 1 - p.
Моменты СВ μi:
(5)
а) Mi{μi} = xi/Δ; б) Mi{μ2i} = 1; в) M1{μiμj} = xixj/Δ2.
Из (5),а) следует, что M1 xi = xi, т.е. операция M{·} линеаризует нелиней-
ность sign{·} (эффект «стохастической линеаризации»). Условие (5),б) экви-
валентно равенству M1 x2i = Δ2, объясняющему робастность — эффект «нор-
мирования мощности» за счет амплитудной характеристики симметричного
ограничителя.
В [9] оценен прирост коэффициента направленного действия и динамиче-
ского диапазона ФАР. Сходимость инструментальных СКО измерения пелен-
га в этом случае составила ∼ K-1/2.
106
3. Ускорение сходимости в схеме с многоэтапным измерением
В [13] рассмотрены методы испытаний, приводящих к сокращению их чис-
ла за счет введения некоторого числа неслучайных точек в алгоритмы Монте-
Карло. Возможность использования, связанных цепью Маркова, и групповых
зависимых испытаний по Лемеру ранее рассматривалась в [14]. В настоящей
статье на основании публикаций [20, 21] сделаем обобщения применительно
к задаче многоэтапного измерения пеленга.
3.1. Теоретико-вероятностное содержание вопроса
Задача измерения интерполирующей добавки Δx при измерении пеленга
методом Монте-Карло сводится к измерению вероятности. На каждом этапе
образуется статистика
∑
(6)
m= μi,
i=1
где μi — элемент вектора выборки μ = (μ1, . . . , μN ) из совокупности с ку-
мулятивной функцией распределения F (μ, p), p — неизвестная вероятность,
подлежащая оценке.
В терминологии [15] это задача нахождения условных оценок. В терми-
нологии [16] это задача параметрического статистического оценивания. При
известном априорном распределении измеряемого параметра вырабатывает-
ся байесова оценка. Статистика (6) имеет биномиальное при независимых
и полиномиальное при зависимых испытаниях распределение. Для выборок
большого размера используется асимптотика Муавра-Лапласа [17].
3.2. Байесова и максимально правдоподобные оценки
вероятности по частоте
При независимых испытаниях и равномерном распределении имеем байе-
сову
m+1
(7)
p∗опт =
N+2
и м аксимально правдоподобную
m
(8)
p∗мп =
N
оценки вероятности (7) и (8).
Оценка максимального правдоподобия (8) является состоятельной и эф-
фективной, а ее нижняя граница дисперсии согласно неравенству Рао-
Крамера [18] равна
p(1 - p)
(9)
σ2(p∗мп) =
N
107
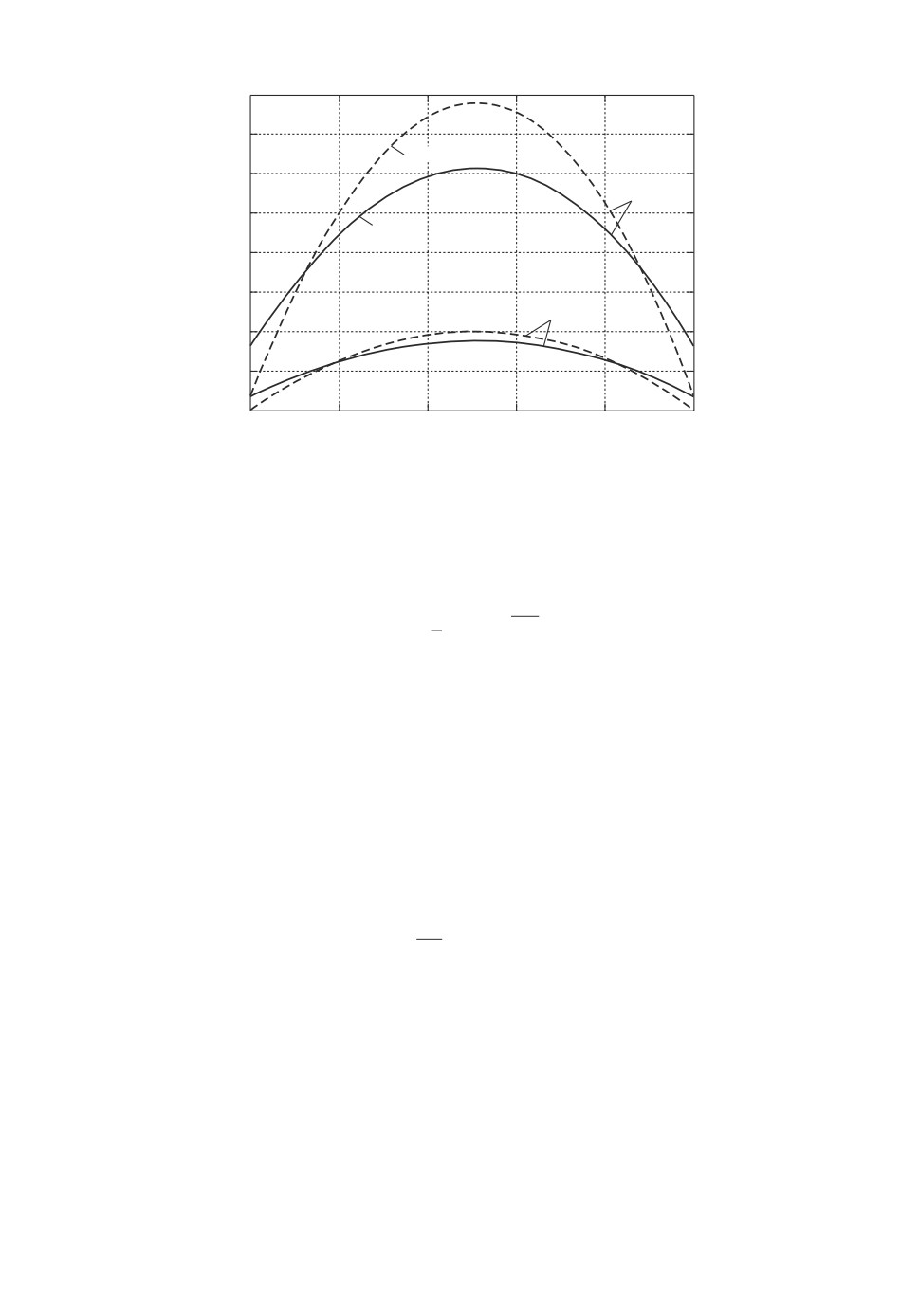
M{(p* p)2/p}
103
p* = pm
12
n = 16
p* = pопт
8
n = 64
4
0
0,2
0,4
0,6
0,8
p
Рис. 1. СКО измерения вероятности p для байесовой (сплошная линия) и
максимально-правдоподобной (штрих-пунктирная линия) оценок.
Сравнивая СКО для оценок (7) и (8), можно найти точки пересечения
кривых (рис. 1)
1
√
(10)
p1,2 ≈
(1 ±
0,5),
2
где видно, что при p < 0,15 и p > 0,85 следует пользоваться оценкой макси-
мального правдоподобия, в остальном диапазоне p лучше байесова оценка.
3.3. Организация обратной связи в методе Монте-Карло
Для повышения инструментальной точности измерения вероятности после
использования априорных сведений используем подход, основанный на изме-
нении условий проведения измерений, что не предусмотрено в [18]. Прежде
покажем, что использование для этой цели лишь разбиение N на этапы не
дает результата. Действительно, если на каждом этапе взять оценку
mi
(11)
p∗мп(mi) =
,
i = 1,2,...,L,
Ni
где L — число этапов измерения; i — номер этапа; Ni — размеры каждого
этапа, то по результатам L этапов можно сформировать оценку
∑
(12)
pΣ∗ =
ηip∗мп(mi
),
i=1
где ηi — весовые коэффициенты, удовлетворяющие условию нормировки
∑
(13)
ηi
= 1.
i=1
108
Оптимизируя весовые коэффициенты методом неопределенных множите-
лей Лагранжа получим
Ni
(14)
ηiопт =
∑
Ni
i=1
Подставляя (14) в (12), имеем
L mi
m
(15)
pΣ∗ =i=1
=
∑
N
Ni
i=1
Таким образом, суммарная оценка pΣ∗ (15) совпадает с оценкой макси-
мального правдоподобия одноэтапной процедуры с числом испытаний N =
∑
= Ni.
i=1
Далее в методе Монте-Карло организуем обратную связь: будем рекурсив-
но изменять условия проведения измерений от этапа к этапу.
Весь объем испытаний N по аналогии с [20, 21] разобьем на два и более
этапов. Первый этап объемом N1 представляет собой классическую схему
Бернулли. На первом этапе выработаем оценку p∗1 исходной вероятности p.
Далее по оценке p∗1 вырабатывается корректирующая эталонная добавка δ.
На втором этапе объемом n2 проведем промежуточные измерения на новой
величине p2 = p1 + δ, сводящей измерения к точкам (10). При введении δ в
измерителях дальности [21] использовалась коммутируемая линия задерж-
ки с отводами. При измерении пеленга θ управляемые добавки вводятся в
квадратурные каналы сигнала [9, 22].
Результаты анализа двухэтапной оценки вероятности показали, что при
организации обратной связи в схеме Бернулли незначительно снижаются
СКО измерения [20].
Резервы повышения точности целесообразно искать в разбиении всего
объема N испытаний на L этапов и организации рекуррентной зависимости
испытаний. Здесь отметим, что известная последовательная оценка вероят-
ности по частоте [19] не фиксирует число испытаний, а основополагающие
работы Вальда и последующие работы глубоко и всеобъемлюще разрешают
эту проблему, однако возникают трудности вычислительного плана. Одна из
трудностей [19] состоит в следующем. Для построения оптимальной процеду-
ры по методу последовательного анализа, нужно решить систему рекуррент-
ных уравнений. Во многих подобных ситуациях решение уравнений удается
получить для небольшого числа шагов.
Алгоритм формирования оценок p∗i, i = 1, . . . , L, вероятности p следую-
щий. После первого этапа формируется оценка p∗1 вероятности p. По этой
оценке вырабатывается корректирующая добавка δ1 = 1 - p∗1, сводящая из-
мерения на втором этапе к узлам СКО (10).
109
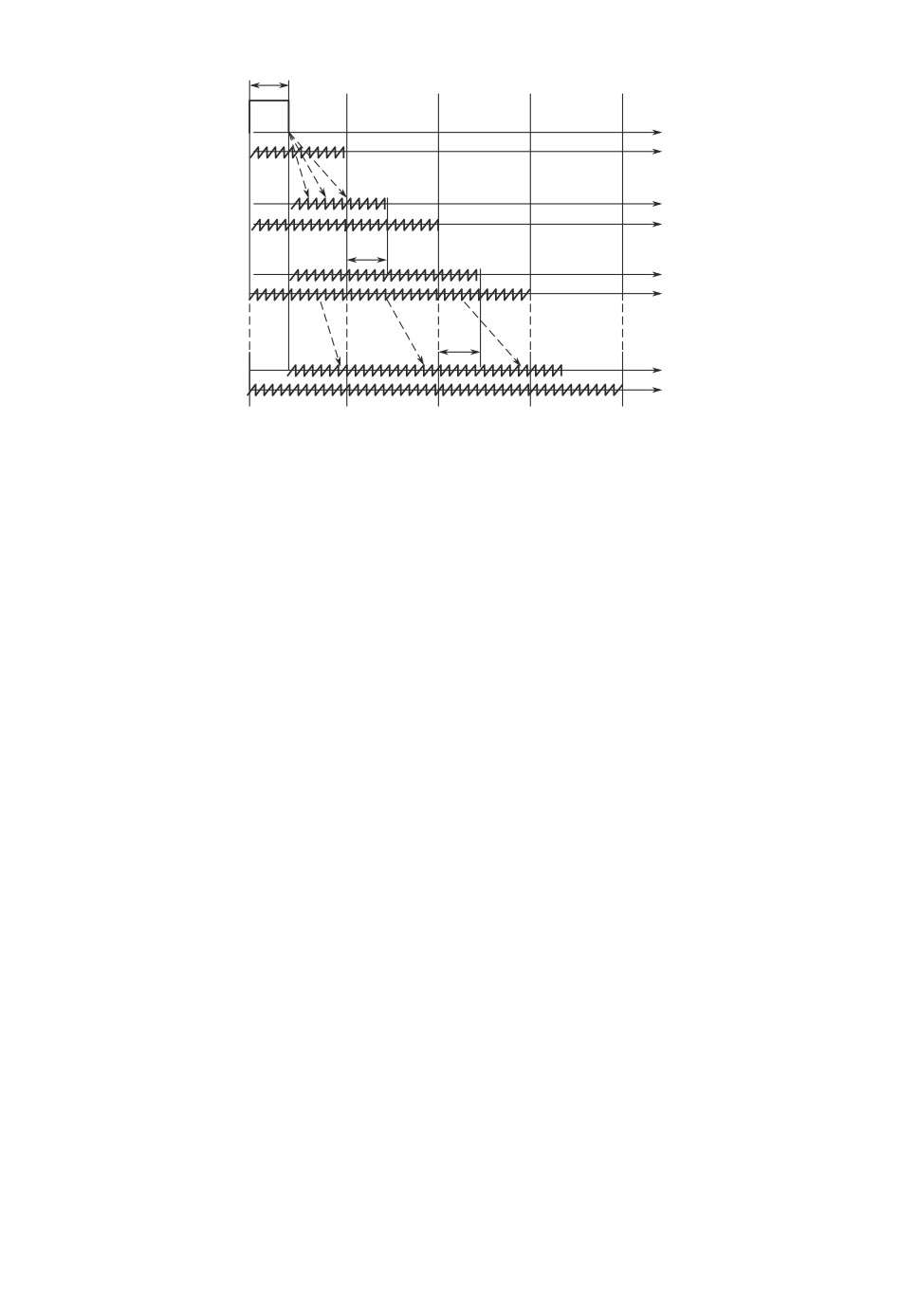
p1
p1
*
1
1
2
*
2
2
p1
3
3
*
3
p1
l
l
*
l
0
1
2
3
l
Рис. 2. Области изменения параметров θi и их оценок θ∗i.
На втором этапе измеряется параметр θ2 = p + δ1 и формируется оценка
исходной вероятности по формуле p∗2 = θ∗2 - δ1, где θ∗2 = m2/N2 — оценка θ2.
Далее вырабатывается корректирующая добавка δ2 = 1 - p∗2 для измерения
параметра θ3 = p + δ2 на третьем этапе и т.д.
В общем виде оценку p∗L вероятности p1 = p на L-м этапе можно предста-
вить в виде
(16)
p∗L = θ∗L - δL-1,
где θ∗L = mL/NL — результат измерения параметра θL = pL + δL-1 на L-м эта-
пе (11); mL — число совпадений; NL — число испытаний; δL-1 = 1 - p∗L-1 —
корректирующая добавка на L-м этапе, определяемая через оценку p∗L-1 на
(L - 1)-м этапе; p∗L-1 = θ∗L-1 - δL-2 и т.д.
По результатам измерений (16) после L этапов формируется результирую-
щая оценка
∑
pΣ∗ =
ηip∗i,
i=1
где ηi — весовые коэффициенты, удовлетворяющие условию (13).
Из анализа [21] следует, что дисперсия D{p∗L} оценки зависит от дис-
персии оценки параметра θ∗L = mL/NL и дисперсии эталонной добавки δL-1:
D{p∗L} = D{θ∗L} + D{δL-1}.
Для определения D{θ∗L} обратимся к рис. 2, на котором для фиксирован-
ного значения p1 показаны области изменения (аттракторы) параметров θi,
их оценок θ∗i, а также реализации отдельных случайных траекторий их из-
менения.
Результаты анализа рекурсивной многоэтапной оценки вероятности пока-
зывают, что организация обратной связи в схеме Бернулли может дать боль-
110
шие выигрыши в снижении инструментальных погрешностей, если одновре-
менно повышать число измерений на этапах.
3.4. Асимптотика Муавра-Лапласа и оценка предельных возможностей
Применение асимптотики Муавра-Лапласа [17] позволяет конкретизиро-
вать распределение параметров θi и через функциональное преобразование
дробной части pi = R{θi} определить качество результирующей оценки p∗L.
Исходя из принципа формирования эталонных добавок, заключающегося
в сведении измерений к узлу θi = 1 с использованием несмещенных оценок
θ∗i = mi/Ni, можно показать, что все математические ожидания M{θi} пара-
метров θi равны 1 за исключением θ1 = p1. Поэтому, аппроксимируя распре-
деление W {θL} нормальным распределением со средним значением a = 1 и
дисперсией DL-1 = σ2L-1, а также учитывая свойства функции дробной до-
ли R{·}, можно определить значения первого и второго моментов вероятно-
сти pL.
В результате вычислений при σL-1 ≪ 1 получим [21]
√
√
pL - p2
2/π - σL-1
2/π
L
(17)
σ2L =
=σL-1
=σL-1
N
NL
NL
√
Учитывая, что σ1 =
(p1q1)/N1, q1 = 1 - p1, нетрудно видеть в (17), что
при увеличении L кривая СКО становится все более плоской в окрестности
точки p1 = 1/2, поэтому для получения усредненного по p1 значения σ2L доста-
точно выполнить вычисления в точке p1 = 1/2. Подставляя p1 = 1/2 и находя
∑l
экстремум (минимум) при фиксированном N =
Ni, получим следующее
i=1
оптимальное соотношение между этапами:
(18)
NL/NL-1 = NL-1/NL-2 = ... = N2/N1
= 2.
Используя соотношение (18), дисперсия будет
)
)(2L-1-1)/2L-1(L-1∏
∕∏
(2
σ2L =
2(i+1)/2i
N1/2i
π
i=0
i=0
Тогда
√
√
σL = lim σ2L =
2/π(22/N),
∑
1
∑ i+1
так как lim
= 2, а lim
=24.
2i
L→∞ i=0 2i
l→∞ i=0
В предельном случае, как это следует из формулы (23), измерения на
L-м этапе будут обеспечивать скорость уменьшения среднеквадратической
ошибки как 1/N. Уменьшение числа этапов L, а также учет других об-
стоятельств, связанных с формированием эталонных псевдослучайных тра-
екторий, приводит к уменьшению достигаемого предела вплоть до значе-
ний 1/N3/4 для L = 2 и 1/N в предельном случае. Таким образом, ско-
рость сходимости предельная ∼ K-3/4 ÷ K-1, K = 1, 2, 3, . . ., т.е. более высо-
кая, чем в классической схеме Бернулли. Эталонные добавки при измерении
111
пеленга физически трактуются как учитываемые фазовые вставки, коррек-
тирующие измеряемые положения фазового фронта поля в апертуре ФАР
(это эквивалентно хаотической случайной перестройке положения фазового
центра при последовательной аппроксимации пеленга «грубыми статистика-
ми») [22]. Предельное инструментальное разрешение и точность измерения
пеленга метода усреднения ГО возрастает как ряд ∼ (K1/2 - K), где K —
размер пространственной апертуры ФАР.
3.5. Возможности предлагаемого подхода
Стохастическое управление фазовым центром реализует скорости увели-
чения инструментальной точности и разрешающей способности, эквивалент-
ные ряду ∼ K1/2 ÷ K, где K — размер пространственной апертуры ФАР. Для
оценки вероятности в методе используется «грубая» бинарная статистика μi,
равная 1 или 0. В этом состоит достоинство подхода, когда текущие грубые
отсчеты получить сложно (или невозможно) либо это делается искусственно
с целью учета ограниченности аппаратурных или вычислительных ресурсов
аппаратуры пеленгатора. В данном случае обратная связь в методе Монте-
Карло отчасти использует ресурс зависимых испытаний. Известны [13] по-
казательные и расчетные примеры ускорения сходимости метода, когда при
оценке вероятности, связанной с числом π в опыте подбрасывания связан-
ной пары игл (засчитываемых за два испытания), точность измерения ве-
роятности по частоте возрастала по сравнению с опытом последовательного
проведения двух независимых испытаний и подсчете числа пересечений игла-
ми начерченных на плоскости параллельных линий. Чем-то это напоминает
«урновую схему» Пойя (см. [23]), когда в урну добавлялось не только из-
вестное количество шаров (здесь это эталонные добавки δ), но и менялся их
цвет. Статистика измерения вероятности по частоте в данном случае — ли-
нейная статистика. Однако, оставляя текущую статистику «грубой» (μi = 1
или μi = 0), в варианте использования нелинейной статистики для оценки
вероятности можно упомянуть процедуру последовательного деления отрез-
ка пополам, т.е. процедуру Больцано. Эта процедура также является поис-
ковой, а скорость увеличения инструментальной (не потенциальной) точно-
сти в идеальном случае возрастет как два в степени K = 1, 2, . . . Поэтому
можно считать, что это есть достоинство предлагаемого подхода, когда при
уверенном отношении сигнал/шум (в условиях отсутствия шума, т.е. модели
пеленга — не как математическое ожидание, а как детерминированная кон-
станта) можно существенно уменьшить инструментальную погрешность, но
это обстоятельство не совсем верное. На самом деле, учет шума приводит
к процедурам стохастической аппроксимации, процедурам Роббинса-Монро,
Кифера-Вольфовица и др. в вариантах использования как линейных, так и
нелинейных оценок, что является предметом исследований других статей.
4. Заключение
Предлагается метод построения информационной системы, осуще-
ствляющей измерение пеленга за счет интерполяции грубых («бинарно-
знаковых») ПВ отсчетов входного сигнала на базе усеченных (малоэлемент-
112
ных) апертур со слабонаправленными приeмопередающими элементами ан-
тенной решетки. Задача измерения пеленга сводится к оценке вероятности
методом Монте-Карло с обратной связью. Для различных алгоритмов при-
водятся результаты расчета инструментальных погрешностей измерения пе-
ленга. Оценка резервов уменьшения инструментальной СКО оценки пеленга
при использовании многоэтапной процедуры в методе Монте-Карло составля-
ет ∼ K-3/4 ∼ K-1, K = 1, 2, 3, . . . Инструментальная точность метода может
быть приведена в соответствие с потенциальной точностью и увеличиваться
с ростом K как ряд K1/2 ÷ K, где K — размер пространственной апертуры
(выборки).
СПИСОК ЛИТЕРАТУРЫ
1.
Metropolis N., Ulam S. The Monte Carlo Metod // J. Amer. Statist. Assoc. 1949.
V. 44.
2.
Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию:
Пер. с англ. М.: Радио и связь, 1986.
3.
Klemm R. Space-Time Detection Theory // The material in this publication was
assembled to support a lecture series under the sponsorship of the sensor and
lectronics Technology Panel (SET) and the Consultant and Exchange Programmer
of RTO presented on 23-24 september 2002 in Moscow, Russia.
4.
Воскресенский Д.И. Антенны с обработкой сигнала: Уч. пос. для вузов. М.:
САЙНС — ПРЕСС, 2002.
5.
Горбунов Ю.Н. Цифровая обработка радиолокационных сигналов в условиях ис-
пользования грубого (малоразрядного) квантования: монография / Федераль-
ное космическое агентство, ФГУП «ЦНИРТИ им. акад. А. И. Берга». М., 2007.
6.
Горбунов Ю.Н., Лобанов Б.С., Куликов Г.В. Введение в стохастическую радио-
локацию. Уч. пос. для вузов. М.: Горячая линия — Телеком, 2015.
7.
Горбунов Ю.Н. Рандомизированная обработка сигналов в радиолокации и связи.
ISBN 978-3-659-37797-6, Изд-во «LAP LAMBERT Academic Publishing», 66121,
Saarbrücken, Germany, 2015.
8.
Горбунов Ю.Н. Стохастическая радиолокация: условия решения задач
обнаружения, оценивания и фильтрации
// Электрон. издание
«Жур-
нал радиоэлектроники», ISSN
1684-1719. М.: ИРЭ им. В.А. Котельни-
кова РАН,
2014.
jre.cplire.ru/jre/nov14/3/text.pdf
9.
Горбунов Ю.Н. Стохастическая интерполяция пеленга в адаптивных антенных
решетках с последовательным диаграммо-образованием на базе усечённых (ма-
лоэлементных) апертур и робастных статистик сигнала на входе / Изд-во «Ра-
диотехника». журн. «Антенны». 2015. № 6. С. 18-26.
10.
Первозванский А.А. Поиск. М.: Наука, 1970.
11.
Цыпкин Я. З. Адаптация и обучение в автоматических системах. М.: Наука,
1968.
12.
Черняк В.С. О новых и старых идеях в радиолокации: МIМО РЛС // Успехи
современной радиоэлектроники. 2011. Вып. 2. С. 5-20.
13.
Соболь И.М. Численные методы Монте-Карло. М.: Наука, 1973.
14.
Горбунов Ю.Н., Бондарев А.В. Алгоритмы и устройства цифровой стохастиче-
ской обработки сигналов в радиолокации. Уч. пос. М.: НИЦЭВТ, ИПК МРП,
1990.
113
15. Левин Б.Р. Теоретические основы статистической радиотехники. Кн. 3. М.: Сов.
радио, 1976.
16. Уилкс С. Математическая статистика. М.: Наука, 1967.
17. Гнеденко Б.В. Курс теории вероятностей. М.: Наука, 1965.
18. Крамер Г. Математические методы статистики. М.: Мир, 1975.
19. Вальд А. Последовательный анализ. М.: Физматгиз, 1960.
20. Гайсов В.Г., Горбунов Ю.Н. Двухэтапная процедура измерения временных ин-
тервалов методом статистических испытаний с обратной связью // Автометрия.
Сиб. отделение АН СССР. 1982. № 2. С. 54-60.
21. Горбунов Ю.Н. Многоэтапная процедура измерения параметров повторяющего-
ся сигнала методом стохастического усреднения цифровых отсчетов // Авто-
метрия. Сиб. отделение АН СССР. 1985. № 3. С. 96-99.
22. Горбунов Ю.Н. Неслучайные траектории стохастической аппроксимации пелен-
га в адаптивных антенных решетках с грубыми пространственно-временными
статистиками // IX Всерос. Научн.-техн. конф. «Радиолокация и радиосвязь»,
ИРЭ им. В.А. Котельникова РАН. М.: 23-25 ноября 2015. С. 57-60.
23. Феллер В. Введение в теорию вероятностей и ее приложения. T. II. М: Мир,
1967.
Статья представлена к публикации членом редколлегии Е.Я. Рубиновичем.
Поступила в редакцию 08.07.2016
После доработки 17.12.2018
Принята к публикации 18.07.2019
114