Автоматика и телемеханика, № 3, 2019
Нелинейные системы
© 2019 г. А.А. КОСОВ, канд. физ.-мат. наук (kosov_idstu@mail.ru)
(Институт динамики систем и теории управления
им. В.М. Матросова СО РАН, Иркутск),
М.В. КОЗЛОВ (kozlov.mvl@yandex.ru)
(Национальный исследовательский Мордовский государственный
университет им. Н.П. Огарева, Саранск)
ОБ АСИМПТОТИЧЕСКОЙ УСТОЙЧИВОСТИ ОДНОРОДНЫХ
СИНГУЛЯРНЫХ СИСТЕМ С ПЕРЕКЛЮЧЕНИЯМИ1
Рассматривается задача об устойчивости сингулярных переключаемых
систем с однородными функциями в правых частях. На основе деком-
позиции на изолированные подсистемы быстрых и медленных движений
получены условия устойчивости полной системы при произвольном режи-
ме переключений. Предложен способ выбора стабилизирующей обратной
связи в случае, когда измерению доступны только быстрые переменные.
Ключевые слова: устойчивость, сингулярные системы, системы с пере-
ключениями, однородные функции, общие функции Ляпунова.
DOI: 10.1134/S0005231019030036
1. Введение
Изучение динамики сингулярных систем, моделируемых дифференциаль-
ными уравнениями с малым параметром при старшей производной, было на-
чато А.Н. Тихоновым [1]. Эти системы играют важную роль в современной
теории управления и интенсивно изучаются (см., например, обзор [2], где ци-
тируется более 500 работ по этой тематике). Начиная с основополагающей
статьи [3] для анализа устойчивости сингулярных систем разрабатывается
подход, основанный на декомпозиции исходной системы на две изолирован-
ные подсистемы для “быстрых” и “медленных” переменных, каждая из ко-
торых существенно меньшей размерности, чем исходная, и изучении их в
отдельности. Аналогичный подход применяется и для решения задачи стаби-
лизации, т.е. синтеза такого закона управления, который гарантирует нуж-
ные свойства устойчивости замкнутой системе [4]. При этом управляющие
обратные связи могут формироваться не по всем координатам, а только по
некоторым, например “быстрым” переменным [5].
В теории управления активно изучаются гибридные системы, описывае-
мые уравнениями с переключениями правых частей в ходе процесса управле-
ния [6-8]. Наличие переключений существенно затрудняет решение задач ана-
лиза динамики и синтеза стабилизирующих управлений, поэтому актуальной
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 17-31-50034).
45
задачей является развитие теории управления для такого рода гибридных
систем [9]. Основным, а часто и единственным строгим методом исследова-
ния динамики гибридных систем обычно выступает метод функций Ляпунова
(см., например, [10-14]). Как следует из обзоров [6-8], наиболее изучены во-
просы устойчивости, стабилизации, построения общих квадратичных функ-
ций Ляпунова для линейных систем. Нелинейные системы с переключениями
в этом плане значительно менее изучены. Как отмечается в [9, с. 206], необхо-
димо прежде всего исследовать отдельные специальные классы нелинейных
систем с переключениями, такие как однородные системы или системы с об-
ратными связями. Устойчивость для класса нелинейных сингулярных систем
с переключениями ранее практически не изучалась в литературе, например,
в подробном обзоре [2] в разделе об устойчивости нелинейные системы с пе-
реключениями не упоминаются.
Основная цель данной статьи состоит в получении условий асимптотиче-
ской устойчивости сингулярной системы с переключениями и однородными
функциями в правых частях в терминах аналогичных свойств отдельных изо-
лированных подсистем быстрых и медленных движений. Переход к изолиро-
ванным подсистемам существенно снижает размерность задачи и упрощает
построение общей функции Ляпунова для конечного семейства дифферен-
циальных уравнений. Рассмотрены два случая: один, когда в правых частях
присутствуют однородные первого порядка функции, удовлетворяющие ло-
кальному условию Липшица, и второй, когда присутствуют однородные поли-
номы нечетной степени от медленных переменных. Доступными измерению
считаются только быстрые переменные, и именно по ним строится стабили-
зирующая обратная связь. При этом матричные коэффициенты выбираются
в отдельности для двух изолированных подсистем. Тем самым исходная за-
дача декомпозируется на две аналогичных, только меньшей размерности, что
существенно упрощает решение.
2. Устойчивость сингулярных однородных первого порядка систем
с переключениями
Рассмотрим семейство сингулярно возмущенных систем
x = f(k)(x) + A(k)12 y,
(1)
εy = g(x) + A22y.
Здесь k ∈ S = {1, . . . , N}, x ∈ Rnx , y ∈ Rny ; ε — малый положительный пара-
метр, A(k)12 и A22 — матрицы соответствующих размерностей; g(x) и f(k)(x) —
однородные первого порядка функции, удовлетворяющие локальному усло-
вию Липшица. Семейство (1) порождает систему с переключениями
x = f(σ(t))(x) + A(σ(t))12y,
(2)
εy = g(x) + A22y.
Здесь σ : [0, +∞) → S — кусочно-постоянная правосторонне непрерывная
функция, имеющая в каждом конечном отрезке лишь конечное число то-
чек разрыва. Функция σ(t) называется законом или режимом переключения
46
и показывает, какая система из семейства (1) функционирует в каждый мо-
мент времени. Задача состоит в том, чтобы получить условия устойчивости
нулевого решения системы (2) при произвольном режиме переключений.
Используя второе уравнение, выпишем линейную систему
(3)
y=A22y
и выражение y через x
(4)
y = -A-122
g(x).
Подставляя (4) в первое уравнение (1), придем к семейству уравнений с од-
нородными правыми частями
(5)
x = f(k)(x) - A(k)12 A-122
g(x).
Теорема 1. Если линейная система (3) асимптотически устойчива, а
для семейства однородных систем (5) построена однородная порядка η > 1
общая функция Ляпунова V1(x), удовлетворяющая оценкам
(6)
a1||x||η ≤ V1(x) ≤ a2||x||η,
||gradxV1(x)|| ≤ a3||x||η-1,
V1
≤ -a4||x||η, ai > 0,
(5)
то существует ε0 > 0 такое, что при всех 0 < ε < ε0 нулевое решение си-
стемы (2) асимптотически устойчиво при произвольных переключениях.
V1
Здесь через
обозначена производная от функции V1(x) в силу систе-
(5)
мы (5) и всюду далее аналогичным образом обозначаются производные в
силу соответствующих систем.
Доказательство приведено в Приложении. Данная теорема декомпозирует
и упрощает процесс исследования устойчивости гибридной системы (2). По-
строение общей функции Ляпунова проводится не для полного семейства (1),
а для семейства однородных систем (5) меньшей размерности. При этом мо-
гут использоваться частные функции Ляпунова для отдельных систем семей-
ства (5) и теорема 1 из [12].
Теперь рассмотрим вопрос об условиях неустойчивости.
Теорема 2. Если линейная система (3) асимптотически устойчива, а
для семейства однородных систем (5) построена однородная порядка η > 1
общая функция Ляпунова V1(x), удовлетворяющая условиям:
1) V1(0) = 0, сколь угодно близко к точке x = 0 есть точки x, в которых
V1(x) < 0;
2) ||gradxV1(x)|| ≤ a3||x||η-1;
V1
3)
≤ -a4||x||η, ai > 0,
(5)
то существует ε0 > 0 такое, что при всех 0 < ε < ε0 нулевое решение си-
стемы (2) неустойчиво при произвольных переключениях.
Доказательство теоремы приведено в Приложении.
47
3. Стабилизация сингулярных переключаемых систем
с однородными полиномами
Рассмотрим задачу стабилизации до асимптотической устойчивости нуле-
вого решения сингулярной системы с однородными полиномами относительно
“медленных” переменных в правых частях при наличии переключений. До-
ступными измерению при этом считаются только “быстрые” переменные, и
именно по ним строится стабилизирующая обратная связь.
Пусть μ > 1 - некоторое нечетное число, x ∈ Rnx . Через x{μ} = col(xμ1, xμ2,
...,xnx) ∈ Rnx будем обозначать вектор, составленный из μ степеней ком-
поне
(
)
= col xμ1, xμ-11x2, . . . , xn
∈ RNx, составленный из всех расположенных в
x
лексикографическом порядке мономов μ-й степени.
Рассмотрим семейство управляемых систем
x=A(i)11x[μ] +A(i)12y+U1,
(7)
εy=A21x[μ] +A22y+U2,
i ∈ S = {1,...,N}.
Здесь x ∈ Rnx , y ∈ Rny , A21, A22, A(i)11, A(i)12 — постоянные матрицы соответ-
ствующих размерностей, ε > 0 — малый положительный параметр. Управ-
ляющие воздействия U1, U2 строятся по принципу обратной связи по “быст-
рым” переменным y, так как только они предполагаются доступными непо-
средственному измерению.
Семейство (7) порождает гибридную систему с переключениями
x=A(σ(t))11x[μ] +A(σ(t))12y+U1,
(8)
εy=A21x[μ] +A22y+U2.
Здесь σ : [0, +∞) → S — кусочно-постоянная правосторонне непрерывная
функция с конечным числом точек разрыва в каждом конечном отрезке.
Управления выберем линейными
(9)
U1 = K1 y, U2 = K2
y,
где K1 и K2 — соответственно постоянные прямоугольная nx × ny и квад-
ратная nx × nx матрицы. Задача стабилизации состоит в том, чтобы выбрать
матрицы K1 и K2 так, чтобы нулевое решение системы (8), замкнутой управ-
лением (9), было асимптотически устойчиво при любом режиме переключе-
ний σ(t). Положим
(10)
K2 = -E - A22.
Здесь E — единичная матрица. Подставляя (10) во второе уравнение (8) и
приравнивая правую часть к нулю, получим
(11)
y=A21x[μ].
48
Заменяя теперь в правой части первого уравнения (8) y выражением (11),
приходим к системе с однородной правой частью
[
]
(12)
x= A(σ(t))11 +A(σ(t))A21 + K1A21 x[μ].
12
Теорема 3. Если матрица K2 выбрана в соответствии с (10), а мат-
рица K1 выбрана так, что для системы (12) существует общая функция
Ляпунова V1(x), удовлетворяющая оценкам
a1||x||η ≤ V1(x) ≤ a2||x||η,
||gradxV1(x)|| ≤ a3||x||η-1,
V1
≤ -a4||x||η-1+μ, η > 1, ai > 0, i = 1,4,
(12)
то существует ε0 > 0 такое, что при всех 0 < ε < ε0 нулевое решение си-
стемы (8), замкнутой указанными управлениями, асимптотически устой-
чиво при произвольном режиме переключений.
Доказательство теоремы приведено в Приложении. Укажем теперь два
случая, в которых можно выбрать стабилизирующую матрицу K1 так, чтобы
были выполнены условия теоремы 3.
В случае, когда Nx = dim x[μ] = dim y = ny и квадратная матрица A21 яв-
ляется невырожденной, за счет выбора матрицы K1 можно сделать матри-
цу K1A21 произвольной. Выбирая K1 так, чтобы было K1A21x[μ] = -hEx{μ},
где h > 0 — достаточно большое число, получаем, что все условия теоремы 3
будут выполняться для функции V1(x) =12 ||x||2. В случае, когда в системе (8)
вместо x[μ] присутствует только x{μ} и rank A21 = nx, матрица AT21A21 явля-
ется симметричной положительно определенной. Управление U1 с матрицей
K1 = -hAT21, h > 0 стабилизирует систему (12), принимающую вид
[
]
x = A(σ(t))11 + A(σ(t))12A21 - hAT
A21 x{μ},
21
при достаточно больших h > 0. При этом в качестве функции V1(x), удовле-
∑
1
творяющей условиям теоремы 3, можно взять V1(x) =
xμ+1i.
μ+1
i=1
4. Примеры
Пример 1. Материальная точка малой массы εm движется в трехмерном
пространстве под действием кубической пружины с переменным коэффици-
ентом жесткости и сил сопротивления. Уравнения движения имеют вид
εm xi + b xi + a(x) x3i = 0, i = 1, 2, 3,
a0
a0
a(x) =
=
,
a0 > 0, b > 0.
||x||2
x21 + x22 + x2
3
Не ограничивая общности, массу можем считать единичной m = 1. Позици-
онные силы Fi(x) = -a(x) x3i являются возвращающими (всегда направлены
к равновесию x = 0), но не являются потенциальными, так как ∂Fi(x)∂x
= ∂Fj(x),∂x
j
i
поэтому третья теорема Томсона-Тэта-Четаева [15] не применима.
49
1
0
2
4
6
8
10
t
-1
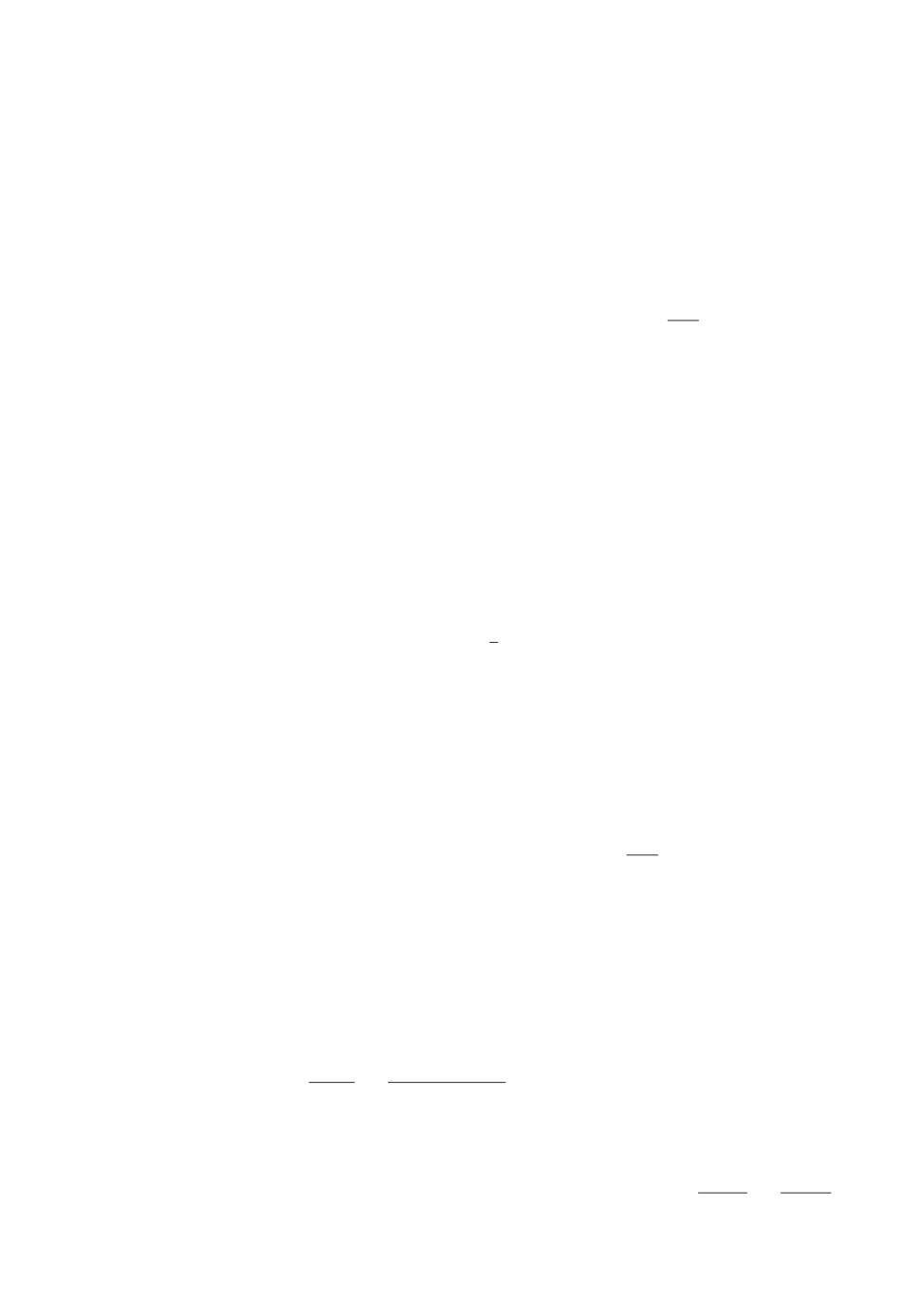
Рис. 1. Решение системы с переключениями из примера 2 при законе пере-
ключения σ(t) = 1 при sin 2t ≥ 0, и σ(t) = 2 при sin 2t < 0.
1
0
2
4
6
8
10
t
-1
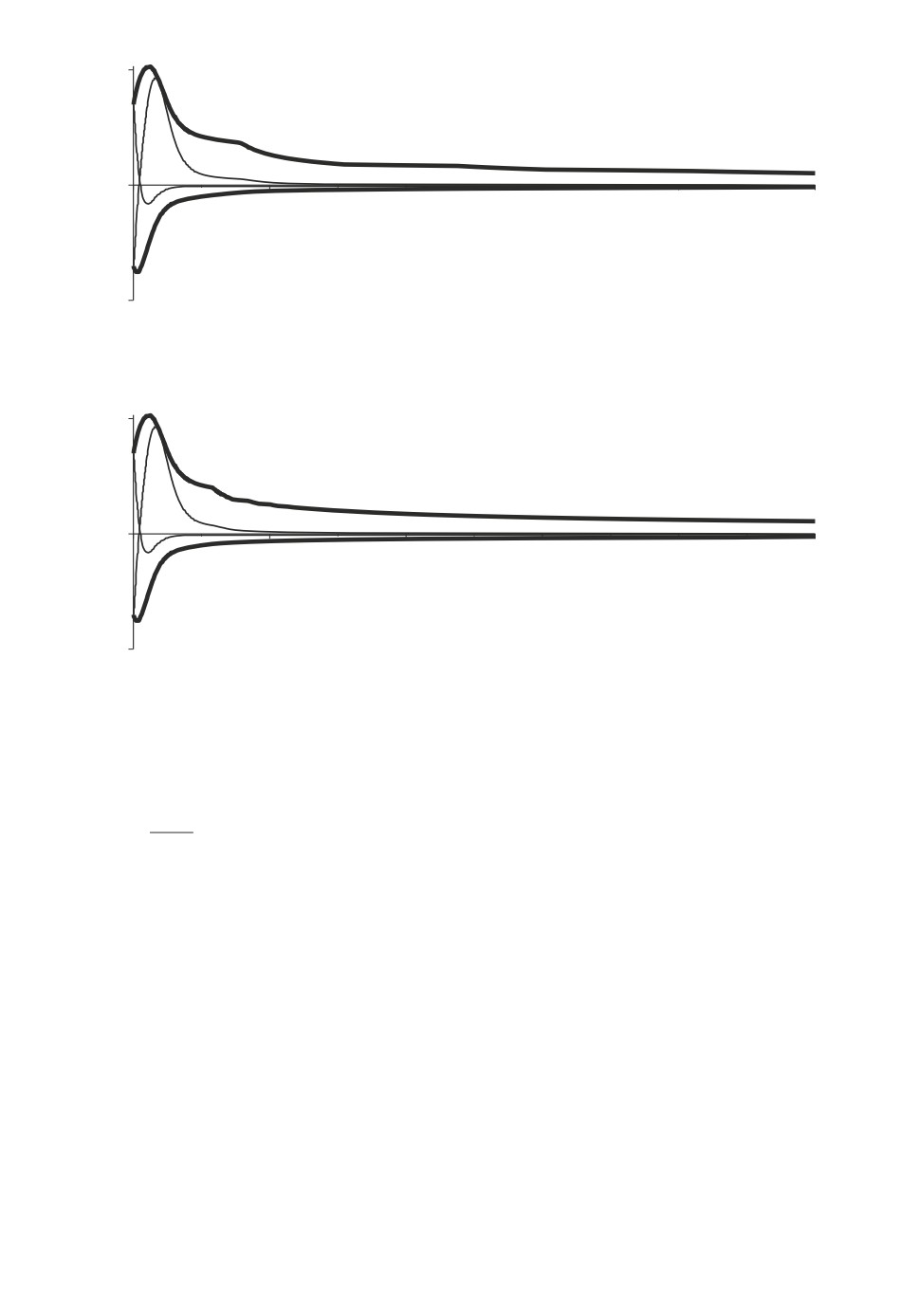
Рис. 2. Решение системы с переключениями из примера 2 при законе пере-
ключения σ(t) = 1 при sin 2t3 ≥ 0, и σ(t) = 2 при sin 2t3 < 0.
В данном примере линейная система
(3) принимает вид
yi = -byi,
i = 1,2,3, а однородная система
(5) записывается следующим образом:
xi = -a0
x3i, i = 1,2,3. Применяя теорему 1, устанавливаем, что положение
b||x||2
равновесия x = 0 асимптотически устойчиво при достаточно малых ε > 0.
Если же позиционные силы являются отталкивающими, т.е a0 < 0, то из
теоремы 2 следует неустойчивость равновесия при достаточно малых ε > 0.
Пример 2. Рассмотрим сингулярную систему
x1 = a(σ(t))1x31 + x32 + u1,
x2 = x31 + a(σ(t))2x32 + u2,
εy1 =x31 -y1, εy2 =x32 -y2.
Здесь σ : [0, +∞) → S, a(j)i > R, i = 1, 2, j ∈ S. Из теоремы 3 следует, что при
управлении u1 = k1y1, u2 = k2y2 при всех достаточно малых ε > 0 нулевое ре-
шение замкнутой системы будет асимптотически устойчивым при произволь-
ных переключениях, если только коэффициенты обратной связи выбраны в
соответствии с условиями ki < -1 - max
a(j)i, i = 1,2.
j∈S
50
Приведем для иллюстрации графики решений системы с переключениями
при следующих значениях параметров: ε = 0,1, S = {1, 2}, a(1)1 = 3, a(2)1 = -3,
a(1)2 = -1, a(2)2 = 3, коэффициентах, стабилизирующих обратных связей по
быстрым переменным k1 = k2 = -4,1, и начальных условиях x1(0) = 0,25,
x2(0) = -0,25, y1(0) = -0,25, y2(0) = 0,25 для двух различных законов пе-
реключения σ(t). Изменение медленных переменных x1(t), x2(t) показано
жирной линией, изменение быстрых переменных y1(t), y2(t) показано тонкой
линией. Каждая из четырех компонент вектора решения однозначно иденти-
фицируется по начальному условию. Точки излома на кривых соответствуют
моментам переключений.
Пример 3. Уравнения системы непрямого управления имеют вид [16,
с. 93]
(13)
σ=cT
y - ρf(σ),
y = Ay + bf(σ).
Здесь y ∈ Rn, σ ∈ R, ρ > 0, c и b — постоянные n-мерные векторы, A — посто-
янная n × n матрица, все собственные числа которой имеют отрицательные
вещественные части, нелинейная характеристика f(σ) удовлетворяет усло-
вию σf(σ) > 0 при σ = 0. Первое уравнение системы (13) скалярное и описы-
вает регулятор, второе уравнение векторное и описывает объект управления.
Пусть для объекта управления характерна быстрая динамика, т.е. в урав-
нениях объекта присутствует малый параметр ε при y, нелинейная характе-
ристика является степенной f(σ) = kσμ с нечетной степенью μ > 1 и k > 0,
регулятор может переключаться на несколько режимов с номерами j ∈ S (на-
пример, с основного режима j = 1 на резервный j = 2 и обратно вследствие
возможных отказов и восстановлений). Тогда после переобозначения σ = x,
f (σ) = kxμ = kx[μ] уравнения (13) принимают вид
(14)
x = cTj y - ρjkx[μ], j ∈ S, εy = Ay + bkx[μ],
где ρj , cj ∈ R, j ∈ S — переключаемые параметры регулятора. Уравнения (14)
являются частным случаем для (7).
Применяя теорему 3 к системе (14) как к системе (7) с уже заданными
обратными связями по координатам объекта y(t), приходим к следующему
результату. Если выполнены неравенства
(15)
ρj + cTjA-1
b > 0, j ∈ S,
то нулевое решение σ = 0, y = 0 гибридной системы, порождаемой семей-
ством уравнений (14), асимптотически устойчиво при всех достаточно ма-
лых ε > 0 при произвольном режиме переключений. Выполнение нера-
венств (15) является необходимым условием устойчивости для каждой из
систем семейства (14), рассматриваемых изолированно, т.е. при фиксирован-
ном j [16, с. 97].
В заключение отметим, что аналогичным образом рассматриваются слу-
чаи, когда матрица A имеет нулевые собственные значения [16, с. 98], а также
когда в системе присутствует не одна, а несколько степенных нелинейностей.
51
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Из асимптотической устойчивости си-
стемы (3) следует, что существует квадратичная форма V2(z), удовлетворяю-
щая условиям
V2
(Π.1)
b1||z||2 ≤ V2(z) ≤ b2||z||2,
||gradV2(z)|| ≤ b3||z||,
≤ -b4||z||2.
(3)
Введем новую переменную по формуле z = y + A-122g(x). Тогда систему (2)
можно переписать в виде
x = f(σ(t))(x) - A(σ(t))12A-122 g(x) + A(σ(t))12z,
(Π.2)
d
Ż=ε-1A22z+A-1
g(x(t)).
22 dt
Здесь с учетом локальной липшицевости g(x)
d
1
g(x(t)) = lim
[g(x(t + h)) - g(x(t))] .
dt
h→+0 h
C учетом свойств функций, входящих в правые части (1), будут иметь место
оценки
k)
k)
f(k)(x) - A(
A-122g(x) ≤ k1||x||,
A(
z ≤ k2||z||,
12
12
d
−1
g(x(t))
k3 (k1||x|| + k2||z||) .
A
≤
22 dt
Здесь k1, k2, k3 — некоторые положительные числа. В качестве общей функ-
ции Ляпунова для системы (Π.2) возьмем V (x, z) = V1(x) + V2(z). Для ее про-
изводной получим оценку
V
≤ -a4||x||η - ε-1b4||z||2 + b3||z||k3 (k1||x|| + k2||z||) +
(Π2)
(Π.3)
σ(t))
+ a3||x||η-1
A(
||z||.
12
Без ограничения общности порядок однородности η функции V1(x) можно
считать равным двум. Тогда в правой части (Π.3) имеем квадратичную фор-
му, которая при достаточно больших ε-1 будет определенно отрицательной.
Тем самым теорема 1 доказана.
Доказательство теоремы 2. Вновь рассмотрим в качестве функции
Ляпунова V (x, z) = V1(x) + V2(z) и для производной в силу системы (Π.2) по-
лучим ту же самую оценку, что и при доказательстве теоремы 1. Эта произ-
водная будет отрицательно определенной при любых переключениях. Однако
сама функция V (x, z) теперь может принимать отрицательные значения при
x = x, z = 0. Поэтому для V (x,z) выполнены все условия первой теоремы
Ляпунова о неустойчивости, ссылка на которую завершает доказательство.
52
Доказательство теоремы
3.
Введем новые переменные
z = y - A21x[μ], тогда при управлении (10) система
(8) перепишется в
виде
[
]
[
]
(Π.4)
x= A(σ(t))11 +A(σ(t))A21 + K1A21 x[μ] + A(σ(t))
+K1
z,
12
12
[μ]
[(
)
(
) ]
∂x
Ż = -ε-1z-A21
A(σ(t))11 +A(σ(t))A21 +K1A21 x[μ] + A(σ(t))
+K1 z .
12
12
∂x
Для входящих в правые части системы (Π.4) функций имеют место оценки
(
)
σ(t))
A(
+A(σ(t))
A21 + K1A21 x[μ]
≤ c1||x||μ,
11
12
(
)
σ(t))
A(
+K1 z ≤ c2||z||, ci > 0.
12
В качестве общей функции Ляпунова для системы (Π.4) возьмем V (x, z) =
= V1(x) + 12||z||2. Для ее производной получим оценку
(Π.5)
V
≤ -a4||x||η-1+μ + a3||x||η-1c2||z|| - ε-1||z||2+
(Π4)
+||A21|| ||z|| ||x||μ-1 [c1||x||μ + c2||z||] .
Без ограничения общности можно считать порядок однородности η функ-
ции V1(x) сколь угодно большим. Правая часть (Π.5) будет определенно от-
рицательной в некоторой окрестности нулевого решения x = 0, z = 0 при вы-
полнении неравенства [17]
η-1
1
+
> 1.
η-1+μ
2
Это неравенство сводится к η > μ + 1 и выполняется при достаточно боль-
шом η. Ссылка на теорему Ляпунова об асимптотической устойчивости за-
вершает доказательство теоремы 3.
СПИСОК ЛИТЕРАТУРЫ
1. Тихонов А.Н. О зависимости решений дифференциальных уравнений от малого
параметра // Мат. сборник. 1948. Т. 22 (64). № 2. С. 193-204.
2. Yan Zhang, D. Subbaram Naidu, Chenxiao Cai, Yun Zou. Singular Perturbations
and Time Scales in Control Theories and Applications: an overview 2002-2012 //
Int. J. Inform. Syst. Sci. 2014. V. 9. No. 1. P. 1-36.
3. Климушев А.И., Красовский Н.Н. Равномерная асимптотическая устойчивость
систем дифференциальных уравнений с малым параметром при производных //
Прикл. мат. и механика. 1961. Т. 25. Вып. 4. С. 680-690.
4. Yang C., Zhang Q., Zhou L. Stability Analysis and Design for Nonlinear Singular
Systems / Lecture Notes in Control and Information Sciences. Berlin-Heidelberg:
Springer-Verlag, 2013.
5. Lobry C., Sari T. Singular Perturbation Methods in Control Theory / Control
lineaire appl. Travaux en cours 64, Hermann, Paris. 2005. P. 151-177.
53
6.
Shorten R., Wirth F., Mason O., Wulf K., King C. Stability Criteria for Switched
and Hybrid Systems // SIAM Rev. 2007. V. 49. No. 4. P. 545-592.
7.
Шпилевая О.Я., Котов К.Ю. Переключаемые системы: устойчивость и проек-
тирование (Обзор) // Автометрия. 2008. Т. 44. № 5. С. 71-87.
8.
Hai Lin, Antsaklis P.J. Stability and Stabilizability of Switched Linear Systems: a
Survey of Recent Results // IEEE Trans. Automat. Control. 2009. V. 54. No. 2.
P. 308-322.
9.
Unsolved Problems in Mathematical Systems and Control Theory / Edited by
V.D. Blondel & A. Megretski. Princeton, Oxford: Princeton Univer. Press, 2004.
10.
Liberzon D. Switching in Systems and Control. Boston, MA: Birkhauser, 2003.
11.
Пакшин П.В., Поздяев В.В. Критерий существования общей квадратичной
функции Ляпунова множества линейных систем второго порядка // Изв. РАН.
Теория и системы управления. 2005. № 4. С. 22-27.
12.
Васильев С.Н., Косов А.А. Анализ динамики гибридных систем с помощью об-
щих функций Ляпунова и множественных гомоморфизмов // АиТ. 2011. № 6.
C. 27-46.
Vassilyev S.N., Kosov A.A. Analysis of Hybrid Systems Dynamics Using the
Common Lyapunov Functions and Multiple Homomorphisms // Autom. Remote
Control. 2011. V. 72. No. 6. P. 1163-1183.
13.
Александров А.Ю., Косов А.А., Чэнь Я. Об устойчивости и стабилизации меха-
нических систем с переключениями // АиТ. 2011. № 6. С. 5-17.
Aleksandrov A.Yu., Kosov A.A., Chen Yangzhou. Stability and Stabilization of
Mechanical Systems with Switching // Autom. Remote Control. 2011. V. 72. No. 6.
P. 1143-1154.
14.
Aleksandrov A.Yu., Kosov A.A., Platonov A.V. On the Asymptotic Stability of
Switched Homogeneous Systems // Syst. Control Lett. 2012. V. 61. No. 1. P. 127-133.
15.
Меркин Д.Р. Введение в теорию устойчивости движения. М.: Наука, 1987.
16.
Барбашин Е.А. Функции Ляпунова. М.: Наука, 1970.
17.
Александров А.Ю. Устойчивость движений неавтономных динамических систем.
СПб.: Изд-во СПбГУ. 2004.
Статья представлена к публикации членом редколлегии А.А. Бобцовым.
Поступила в редакцию 15.07.2018
После доработки 19.09.2018
Принята к публикации 08.11.2018
54