Автоматика и телемеханика, № 3, 2019
Управление в технических системах
© 2019 г. В.И. МЕРКУЛОВ, д-р техн. наук (from_fn@mail.ru),
А.С. ПЛЯШЕЧНИК, канд. физ.-мат. наук (a_plyashechnik@mail.ru)
(АО «Концерн «Вега», Москва)
ЗАДАЧА УПРОЩЕННОГО ЦЕЛЕРАСПРЕДЕЛЕНИЯ
ПРИ ГРУППОВОМ ПРОТИВОБОРСТВЕ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ1
Предложен способ упрощенного группового целераспределения, обес-
печивающий не только назначение целей перехватчикам, но и дающий
возможность построить предполагаемые траектории перехвата с учетом
реальных ограничений, выбывания участников и приоритета целей.
Ключевые слова: целераспределение, наведение, управление летательны-
ми аппаратами, выбывание участников, приоритет целей.
DOI: 10.1134/S0005231019030085
1. Введение
Специфической особенностью современного взаимодействия средств напа-
дения и защиты является их групповое применение [1]. В связи с этим весьма
важной является задача оптимизации целераспределения участников группы
защиты, обеспечивающая успех в боестолкновениях летательных аппаратов.
В общем случае решение этой задачи осуществляется в три этапа:
• на первом — оценивается возможность всех участников группы осуществ-
лять перехват, исходя из запасов топлива и расстояний между перехват-
чиками и целями;
• на втором — для всех участников, удовлетворяющих условиям по топли-
ву, решается задача целераспределения, суть которой состоит в назначе-
нии для каждого перехватчика конкретной цели, наилучшей по тому или
иному критерию;
• на третьем — оценивается возможность получения для каждой пары тра-
ектории перехвата, удовлетворяющей ограничениям по скоростям и пере-
грузкам.
Необходимо отметить, что в отечественной литературе вопросам оптими-
зации этих задач уделяется недостаточное внимание. В зарубежной лите-
ратуре рассматривается множество различных подходов к решению задачи
целераспределения, учитывающих:
• тип противника (активный, пассивный);
• способы представления времени (непрерывное, дискретное);
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 18-08-01083-а).
123
• тип представления исходных моделей (детерминированные, статистиче-
ские);
• виды используемых функционалов качества;
• способы решения задачи (одношаговые, многошаговые);
• различные наборы ограничений и т.д.
Детальный обзор этих подходов выполнен в [2]. Следует подчеркнуть, что
в большинстве этих подходов построение целераспределения сводится к реше-
нию достаточно сложных математических задач. Наиболее распространенной
среди них является известная задача WTA (Weapon Target Assignment) [3, 4],
представляющая собой достаточно сложную задачу нелинейного целочислен-
ного программирования, коэффициенты которой определяются заданными
вероятностями перехвата. Хотя существуют сложные способы численного по-
иска приближенного решения, способные решить задачу при сотне целей и
перехватчиков, трудоемкость их применения неадекватно возрастает с ро-
стом числа участников. Кроме того, вопрос определения этих вероятностей,
как правило, не обсуждается.
С учетом устойчивой тенденции возрастания количества участников про-
тивоборствующих групп [5], особенно с участием беспилотных летательных
аппаратов, весьма актуальным является использование более простого спо-
соба целераспределения, основанного на минимизации суммы упрощенных
функционалов качества с учетом ограничений на скорости и ускорения. Та-
кой подход позволяет решать задачу минимизации суммарного функционала
качества с высокой скоростью и для достаточно больших групп участников.
Далее задача целераспределения будет рассматриваться в трех различных
постановках:
• целераспределение в стационарных группах нападения и защиты с равно-
значными целями;
• целераспределение при выбывании отдельных участников противобор-
ствующих групп;
• целераспределение с учетом приоритета целей.
2. Общая постановка задачи и схема ее решения
Для групп, состоящих из N произвольно расположенных перехватчиков
и M целей, необходимо назначить каждому n-му (n = 1,N) перехватчику
свою m-ю (m = 1, M) цель, наилучшую по минимуму суммарного функцио-
нала качества:
∑
(1)
I = In,m(n),
n=1
в котором In,m представляет собой индивидуальный функционал качества,
соответствующий перехвату n-м перехватчиком m-й цели. Минимизация про-
изводится по всем возможным способам m(n) назначения n-му перехватчику
m-й цели. При этом если перехватчиков больше, чем целей, то каждой цели
должен быть назначен отдельный перехватчик, в противоположном случае
каждому перехватчику должна быть назначена отдельная цель.
124
Задача будет решаться при условии, что выполняются следующие допу-
щения:
•
целераспределение выполняется на авиационном комплексе радиолокаци-
онного дозора и наведения [1], бортовая радиолокационная система кото-
рого работает в режиме многоцелевого сопровождения с формированием
координат целей и оценок их скоростей и курсов [6];
•
запаса топлива на каждом перехватчике достаточно для выполнения пе-
рехвата;
•
цели не маневрируют и движутся с постоянными, но разными скоростями;
•
траектория каждого перехватчика состоит из двух участков: на первом
выполняется доворот на цель до требуемого угла упреждения с постоян-
ным ускорением, а на втором — прямолинейный полет в упрежденную
точку встречи;
•
все перехватчики, расположенные в пространстве произвольно, имеют раз-
личную начальную скорость;
•
известны максимально допустимые значения скоростей и ускорений пере-
хватчиков;
•
в качестве перехватчиков используются беспилотные летательные аппара-
ты в режиме “камикадзе”.
Решение задачи будет состоять из следующих этапов.
1.
На первом этапе выбирается класс траекторий, с помощью которых пере-
хватчики должны перехватывать цель. На основе этого выбирается инди-
видуальный функционал качества перехвата для выбранного перехватчи-
ка и выбранной цели с учетом ограничений по скорости и ускорению.
2.
На втором этапе задача поиска минимума индивидуального функционала
качества сводится к нескольким задачам минимизации с ограничениями
типа равенств.
3.
На третьем этапе производится назначение целей перехватчикам, обеспе-
чивающее минимум суммарного функционала (1). На этом этапе будут
рассмотрены несколько наиболее востребованных вариантов решения за-
дачи: обычный вариант целераспределения, целераспределение с выбыва-
нием участников, а также целераспределение с учетом приоритета целей.
3. Построение траектории перехвата для отдельной пары перехватчик - цель
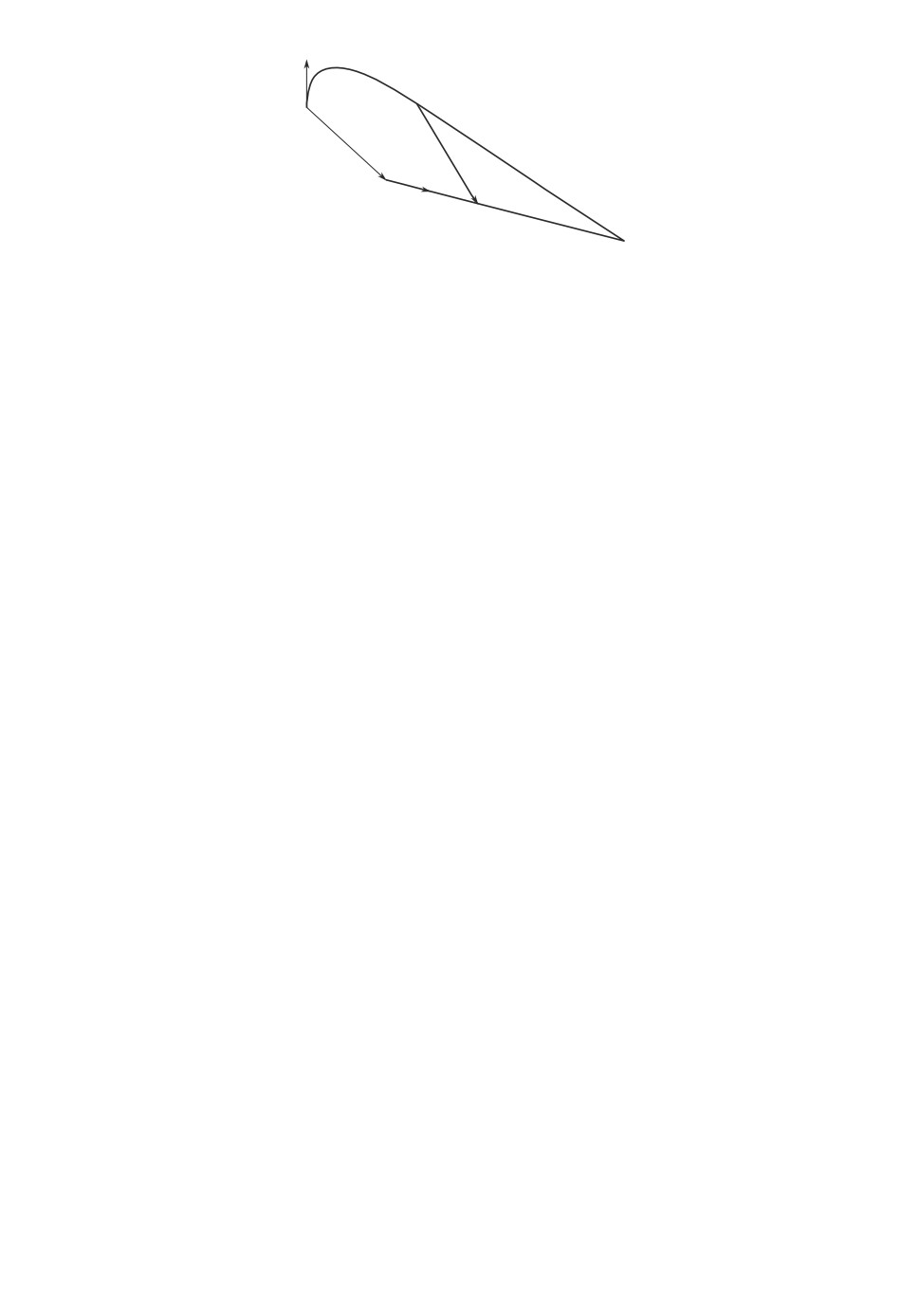
Выберем определенный перехватчик и определенную цель (рис. 1).
Пусть в начальный момент перехватчик, находится в точке A и движется
со скоростью V0, а цель находится в точке B и движется со скоростью V.
Будем строить предполагаемую траекторию перехвата следующим образом:
сначала перехватчик движется с постоянным ускорением J, выполняя до-
ворот на цель, затем в момент времени t, когда перехватчик находится в
точке C, а цель находится в точке D, продолжается его движение с постоян-
ной скоростью в точку встречи E. В качестве индивидуального функционала
в (1) используем соотношение
(2)
In,m
= T + K|J|t,
125
V0
C
A
r0
r1
B
V
D
E
Рис. 1. Траектории движения перехватчика и цели.
где T - полное время движения перехватчика по траектории, а второе слагае-
мое учитывает затраты на формирование управляющего сигнала, определяе-
мого ускорением J. Постоянный коэффициент K выбирается из соображений
баланса между временем перехвата и затратами на движение с ускорением.
Условие перехвата в случае, когда перехватчик и цель движутся с по-
стоянной скоростью, заключается в том, что относительная скорость дви-
жения перехватчика направлена по линии визирования. Это означает, что в
момент t окончания действия ускорения относительная скорость движения
-→
должна быть направлена по вектору
CD (рис. 1). Тогда перехватчик и цель
встретятся в точке E. Если обозначить в момент t относительное положение
-→
цели rt =
CD и скорость перехватчика Vt, то из условия перехвата следу-
ет то, что для некоторого τ ≥ 0 выполнено условие rt = τ(Vt - V). Видно,
что τ является интервалом времени между моментом окончания действия
ускорения и моментом перехвата. Обозначим положение цели относительно
-→
перехватчика в начальный момент времени:
AB = r0. Выражая rt,Vt через
начальные величины, получим
(3)
r0 + Vt - V0t - Jt2/2 = τ(V0
+ Jt - V).
Преобразовав (3), получим
(2τ + t)Jt = 2r0 + 2(τ + t)(V - V0).
Сумма t + τ представляет собой полное время движения T . Тогда
(4)
(2T - t)Jt = 2r0 + 2T (V - V0
).
Потребуем, чтобы скорость перехватчика Vt = V0 + Jt в момент оконча-
ния действия ускорения не превышала Vmax, а его ускорение не превыша-
ло Jmax. Из (4) следует, что ограничение |J| ≤ Jmax определяет неравенство
(5)
2|r0 + T (V - V0)| ≤ t(2T - t)Jmax,
а ограничение |Vt| ≤ Vmax - неравенство
(6)
|2r0 + 2VT - V0t| ≤ (2T - t)Vmax
126
при
(7)
T ≥ t,
(8)
t ≥ 0.
Определив Jt из (4) и подставив в (2), получим функцию двух переменных
|r0 + T (V - V0)|
In,m(T,t) = T + 2K
,
2T - t
которую требуется минимизировать при ограничениях (5)-(8). В силу моно-
тонной зависимости функционала In,m(T, t) от переменной t при фиксиро-
ванном значении T он принимает минимальное значение на границе области,
определяемой неравенствами (5)-(8). В результате задача минимизации раз-
бивается на несколько подзадач, в которых одно или два неравенства (5)-(8)
полагаются равенствами.
Начнем с рассмотрения случая, когда
(6) является равенством, т.е.
|Vt| = Vmax. С помощью условия |V0 + Jt| = Vmax функционал (2) можно за-
писать в виде
√
In,m = T + K V2max - V20 - 2(Jt,V0).
После подстановки Jt из (4) получим
√
4(r0, V0) + 4T (V - V0, V0)
In,m = T + K V2max - V20 -
2T - t
Перейдем от переменной T к z = 2T - t. Тогда функционал примет вид
√
t+z
4(r0, V0)
2t(V - V0, V0)
(9)
In,m =
+K V2max-V20-2(V-V0,V0)-
-
,
2
z
z
а равенство (6) запишется как
(10)
|2r0 + 2Vz + (V - V0)t| = zVmax.
Введем обозначения
a = |V - V0|2; b = 2(V - V0,V);
(11)
c = |V|2 - V 2max; d = 4(V - V0,r0
);
e = 4(V,r0); f = 4|r0|2; g = J2max.
Тогда после возведения (10) в квадрат получим
(12)
at2 + btz + cz2
+ dt + ez + f = 0,
а (9) примет вид
√
In,m = (t + z)/2 + K
a - c + (d - e)/z + (b - 2a)t/z.
127
Сделаем замену переменных x = 1/z; y = y/z. Тогда задача сводится к ми-
нимизации функционала
√
(13)
In,m = (y + 1)/2x + K
a - c + (d - e)x + (b - 2a)y
при ограничении
(14)
G(x, y) = ay2 + by + c + dxy + ex + fx2
= 0.
Если ввести множитель Лагранжа λ, то необходимым условием минимума
будет
∂In,m(x,y)/∂x = λ∂G(x,y)/∂x;
∂In,m(x,y)/∂y = λ∂G(x,y)/∂y.
Обозначим: P = 2ay + b + dx; Q = 2fx + e + dy; H = (d - e)x + (2a - b)y. По-
сле исключения λ и вычисления производных получим уравнение
) (
)
(1
K(2a - b)
y+1
K(d - e)
+
√
Q=
-
+
√
P.
x
H+a-c
x
H+a-c
Избавившись от корня с помощью возведения в квадрат, получим равенство
K2x4((d - e)P - (2a - b)Q)2 = (Qx + P(y + 1))2(H + a - c),
которое после упрощения с помощью (14) принимает вид
(15)
K2x4((d - e)P - (2a - b)Q)2 - (H + b - 2c)2
(H + a - c) = 0.
Тем самым задача минимизации (13) сводится к решению системы урав-
нений (14), (15). Так как коэффициент f = |r0|2 положителен, заменой x =
= (2ξ - dy - e)/2f можно привести (14) к виду ξ2 = a1y2 + b1y + c1. При
этом (15) можно записать по степеням ξ как
h0(y)ξ6 + h2(y)ξ4 + h4(y)ξ2 + h6(y) = ξ(h1(y)ξ4 + h3(y)ξ2 + h5(y)),
где hk(y) - некоторые многочлены степени k. После возведения в квадрат
останутся только четные степени ξ, которые выражаются через y. В резуль-
тате получится уравнение двенадцатой степени относительно y. Численно
найдем все его действительные корни при помощи известных алгоритмов на-
хождения корней многочленов [7]. Подставим найденные корни в (14) и из
полученного квадратного уравнения найдем действительные значения x, ес-
ли таковые существуют. В результате получим несколько пар значений x, y.
Перейдем обратно к переменным T, t и исключим те значения, которые не
удовлетворяют (5), (7) и (8). Оставшиеся пары занесем в общий список кан-
дидатов на минимум функционала (2).
Перейдем к случаю, когда равенством является (5), т.е. |J| = Jmax. Из этого
равенства можно выразить t:
>
?
√
?
4aT2 + dT + f
(16)
t=T -
√T2 -
,
g
128
где использованы обозначения (11). Знак перед корнем выбран исходя из
условия t ≤ T . В функционале (2) положим |J| = Jmax и подставим в него
найденное выражение для t. В результате функционал качества становится
функцией T :
>
?
√
?
4aT2 + dT + f
In,m(T) = (KJmax + 1)T - KJmax√T2 -
g
Для определения экстремума возьмем производную dIn,m(T )/dT , приравняв
ее нулю. Если обозначить
4aT2 + dT + f
8aT + 2d
h = 16(1 + 1/KJmax)2, f1(T) =
,
f2(T) =
,
g
g
то после ряда преобразований условие равенства нулю производной опреде-
ляется соотношением
(
)2
(17)
(16 - h)T2f1(T ) + f2(T )2
- f1(T)(8Tf2(T) - hf1(T))2
= 0,
которое после раскрытия скобок приводит к уравнению восьмой степени по
переменной T . Решим его численно. Для каждого полученного T найдем t
из (16). Из всех полученных пар действительных значений (T, t) оставим
только те, которые удовлетворяют (6)-(8). Занесем их в общий список кан-
дидатов на минимум функционала (2).
Пусть теперь равенством является (7), т.е. T = t - ускорение работает все
время движения. Выразим Jt из (4) и подставим в (2):
In,m = T + 2K|r0/T + V - V0|.
Если перейти к z = 1/T , то в обозначениях (11) получим
√
In,m(z) = 1/z + K
fz2 + 2dz + 4a.
Уравнение dIn,m(z)/dz сводится к уравнению шестой степени
(18)
K2z4(fz + d)2 = fz2
+ 2dz + 4a.
Решим его численно и те корни, для которых выполнены условия (5), (6)
и (8), добавим в общий список кандидатов на минимум функционала (2).
Рассмотрим случай, когда равенством является (8), т.е. t = 0 - ускорение
не включается. В этом случае уравнение (4) практически никогда не будет
выполнено, так как оно требует абсолютно точного перехвата цели без манев-
ра перехватчика. Но здесь удобно поступить следующим образом. Расстоя-
ние до цели в момент T будет |r0 + (V - V0)T |. Оно принимает минимальное
√
значение rmin =
f /4 - d2/16a при Tmin = -d/4a в обозначениях (11). Ес-
ли Tmin ≥ 0 и величина промаха rmin находится в допустимых пределах, то
добавим значение Tmin в общий список кандидатов на минимум с соответ-
ствующим значением функционала In,m = Tmin.
129
Перейдем к рассмотрению случаев, когда из четырех неравенств (5)-(8)
два являются равенствами.
Пусть равенствами являются выражения (5) и (6), т.е. |Vt| = Vmax, |J| =
= Jmax. Сделаем замену z = 2T - t. Тогда после возведения в квадрат в обо-
значениях (11) равенство (6) примет вид (12), а равенство (5) запишется как
(19)
gt2z2 - a(z + t)2
− d(t + z) - f = 0.
Сложив (19) и (12), получим
gt2z2 - (c - a)z2 + (b - 2a)tz + (e - d)z = 0.
Можно сократить на z, так как z = T + (T - t) ≥ T > 0:
(20)
gt2
z - (c - a)z + (b - 2a)t + (e - d) = 0.
Выразим отсюда z и подставим в (12). Получится уравнение шестой степени
относительно t:
(21)
cp1(t)2 - p1(t)p3(t)p2(t) + p4(t)p2(t)2
= 0,
где обозначено
p1(t) = (b - 2a)t + (e - d); p2(t) = gt2 + (c - a);
p3(t) = bt + e; p4(t) = at2 + dt + f.
Численно найдем все действительные корни t уравнения (21), затем найдем
соответствующие значения z из (20) и значения T = (z + t)/2. Удовлетворяю-
щие неравенствам (7) и (8) значения занесем в общий список кандидатов на
минимум функционала (2).
Пусть равенствами являются (5) и (7). Тогда после подстановки t = T в (5)
и возведения в квадрат получится уравнение
(22)
gT4 - 4aT2
− 2dT - f = 0.
Его решения, удовлетворяющие неравенствам (6) и (8), добавим в общий спи-
сок кандидатов на минимум функционала (2).
Пусть теперь равенствами являются (6) и (7). Подставим t = T в (6) и
возведем в квадрат. В обозначениях (11) получим уравнение
(23)
(a + b + c)T2
+ (e + d)T + f = 0.
Его решения, удовлетворяющие неравенствам (5) и (8), добавим в общий спи-
сок кандидатов на минимум функционала (2).
Вырожденный случай, когда одним из равенств является (8), уже был
рассмотрен ранее.
Теперь найдем глобальный минимум функционала (2). Для всех пар ве-
личин (T, t) из общего списка кандидатов на минимум функционала (2), по-
строенного на предыдущих этапах, вычислим |Jt| с помощью (4) и подставим
полученное значение в (2). Выберем те величины, которые дают минималь-
ное значение. Полученное значение T вместе с соответствующим значением t,
значением функционала In,m и вектором J определяют наилучшую траекто-
рию перехвата цели и ее стоимость.
130
4. Формирование целераспределения группы на группу
Решив задачу поиска минимума (2) для одиночного перехватчика и цели,
вернемся к рассмотрению групп перехватчиков и целей. Для каждого пере-
хватчика с номером n и цели с номером m определим наилучшую траекторию
перехвата и соответствующее значение In,m функционала (2). Основываясь
на этих данных, приведем решение задачи целераспределения в различных
ее постановках.
Начнем с простейшей задачи, когда число перехватчиков равно числу це-
лей. Будем искать назначение целей перехватчикам, дающее минимальную
суммарную стоимость (1). В результате получаем задачу, известную под на-
званием «задача о назначениях», с матрицей стоимости In,m. Способ решения
этой задачи, известный как «венгерский алгоритм» [8], состоит из последова-
тельных итераций, на каждой из которых назначение m(n) меняется так, что
суммарная стоимость выбора уменьшается. В результате получается такой
выбор, который дает минимальное значение суммарной стоимости. Вычисли-
тельная сложность этого алгоритма для квадратной матрицы размера N × N
пропорциональна N3.
В случае, когда N = M, требуется выполнять целераспределение при из-
бытке перехватчиков или целей. Венгерский алгоритм также работает с пря-
моугольной матрицей, определяя наилучшее назначение min(N, m) целей
на min(N, m) перехватчиков. Будем действовать следующим образом. Ес-
ли N < M, то назначаем N целей на N перехватчиков, а остальные цели
не трогаем. Если N > M, найдем такое максимальное число k, что kM ≤ N,
и объединим k копий матрицы In,m размера N × M в одну матрицу раз-
мера N × kM. Решив «задачу о назначениях» для этой матрицы, получим
назначение kM перехватчиков на kM целей по k перехватчиков на каждую
цель. Затем еще раз решим «задачу о назначениях» и назначим N - kM
оставшихся перехватчиков на M целей.
Этот способ целераспределения также позволяет учитывать выбывание
целей или перехватчиков. Для этого достаточно просто выполнить заново
всю процедуру целераспределения при выбывании участников. При повтор-
ном выполнении целераспределения новое назначение целей может сильно
отличаться от предыдущего. Если это нежелательно, то можно ввести до-
полнительную коррекцию, умножив величины In,m на некоторый множитель,
меньший единицы, для тех пар (n, m), которые были назначены друг другу на
предыдущем шаге. Тем самым ранее назначенные пары перехватчик - цель
получают некоторое преимущество.
Если все перехватчики обладают одинаковыми характеристиками, а среди
целей некоторые считаются более важными, то процедура целераспределения
усложняется, поскольку требуется определение дополнительного наряда пе-
рехватчиков, предназначенных специально для перехвата важных целей.
Назначение конкретного числа перехватчиков, необходимого для перехва-
та важной цели, может быть осуществлено различными способами. Ниже бу-
дет рассмотрен один из самых простых способов решения этой задачи, когда
известны результаты ранжирования целей по степени их важности [9], тре-
буемые вероятности их поражения PT и соотношение летно-технических ха-
131
П1
Ц1
И
П2
Ц2
С
П3
Ц3
П4
Рис. 2. Пример графа целераспределения.
рактеристик (ЛТХ) самолетов и оружия противоборствующих сторон [10, 11],
позволяющие определить вероятность индивидуального поражения Pi важ-
ной цели конкретным перехватчиком.
На первом шаге определяется число km перехватчиков, реализующих ве-
роятность Pm поражения важной цели c номером m не меньше требуемой
вероятности PT,m, из условия
(24)
Pm = 1 - (1 - Pi,m)km ≥ PT,m,
где Pi,m - вероятность индивидуального поражения цели одним перехватчи-
ком.
В ситуации, когда общее число перехватчиков достаточно, чтобы назна-
чить по km перехватчиков для всех важных целей и по одному перехватчику
для остальных целей, задачу можно решить тем же способом, что и в преды-
дущем пункте. Достаточно лишь расширить матрицу In,m: для важных целей
вместо одного столбца нужно вставить km копий исходного столбца. Реше-
ние «задачи о назначениях» с новой матрицей позволяет получить нужный
результат.
Более сложной является ситуация, когда общее число перехватчиков до-
статочно, чтобы назначить по km перехватчиков для всех важных целей, но
оставшихся перехватчиков не хватит на все остальные цели. Нужно миними-
зировать суммарную стоимость (1) так, чтобы для каждой важной цели было
назначено km перехватчиков. Эту задачу уже нельзя сформулировать в виде
«задачи о назначениях». Однако ее можно сформулировать в виде более об-
щей задачи нахождения потока минимальной стоимости в графе. Подробное
описание этой задачи и способов ее решения можно найти в [12, 13].
Задача поиска целераспределения в виде задачи нахождения потока мини-
мальной стоимости в графе формулируется следующим образом. Граф целе-
распределения (рис. 2) представляет собой направленный граф, содержащий
по одной вершине для каждого перехватчика и цели, а также две специаль-
ные вершины: исток (И) и сток (С).
От каждого перехватчика n к каждой цели m ведет ребро стоимостью In,m
и с единичной пропускной способностью. Из истока к каждому перехватчи-
ку ведет ребро нулевой стоимости и единичной пропускной способности. От
каждой цели к стоку идет ребро. Для обычных целей его стоимость зада-
ется величиной, значительно превышающей максимум величин In,m, а его
132
пропускная способность равна единице. Для важных целей стоимость ребра
равна нулю, а пропускная способность равна km. Требуется пропустить по-
ток размера N из истока в сток. Решением задачи является величина потока
для каждого ребра. Назначение целей на перехватчики определяется ребра-
ми, ведущими от перехватчиков к целям, для которых величина найденного
потока равна единице.
В заключение перечислим данные, необходимые для использования ал-
горитма. К ним относятся: векторы скорости всех перехватчиков и целей;
векторы относительного положения для каждой пары перехватчик - цель;
максимальные ограничения на величины скорости и ускорения перехватчи-
ков. Эти данные могут быть представлены в любой форме: в декартовых или
полярных координатах, в абсолютных или относительных величинах. Нужно
лишь указать способ вычисления коэффициентов (11).
5. Исследование работоспособности алгоритма целераспределения
Для моделирования использовалась среда Matlab на компьютере с процес-
сором Core I5-4670, 3.40 ГГц с 4Гб оперативной памяти. Исследование рабо-
тоспособности алгоритма проводилось по результатам имитационного моде-
лирования процедуры перехвата целей перехватчиками при следующих усло-
виях:
• все перехватчики обладают достаточным запасом топлива;
• все цели и перехватчики размещены в пространстве случайным образом;
• начальные значения скоростей перехватчиков выбираются случайным об-
разом из диапазона Va,min, . . . , Va,max а для целей из диапазона Vb,min,
...,Vb,max;
• на перехватчики накладываются ограничения по скорости Va,max и уско-
рению Jmax.
При выборе назначения для каждой пары перехватчик - цель ищется ми-
нимальное значение In,m функционала (2) при ограничениях (5)-(8). Для
этого последовательно решается система (14), (15) и уравнения (17), (18),
(21)-(23); среди всех полученных решений выбирается то, которое обеспечи-
вает минимум функционала (2).
На основе полученных значений In,m выбирается распределение целей по
перехватчикам в соответствии с постановкой задачи. Далее проводится моде-
лирование решения задачи целераспределения в нескольких различных по-
становках.
В самом простом варианте, приведенном на рис. 3, проводилось имитаци-
онное моделирование процедуры перехвата четырех целей четырьмя пере-
хватчиками. Все цели предполагаются равнозначными и выбывания объек-
тов не происходит. Решение получается на основе применения «венгерского
алгоритма» к матрице, составленной из величин In,m.
Задано ограничение скорости перехватчиков Vmax = 400 (все скорости за-
даны в метрах в секунду), максимальное ускорение перехватчиков Jmax =
= 30м/c2. Коэффициент K в (2) выбран равным 1/30. Начальные скоро-
сти перехватчиков 283, 283, 283, 250. Начальные скорости целей 177, 164,
133
Ц2
Ц1
Ц3
Ц4
B42
B34
B23
B11
П4
П3
П1
П2
Рис. 3. Вариант группового целераспределения и перехвата.
Ц1
Ц2
П2
П1
П3
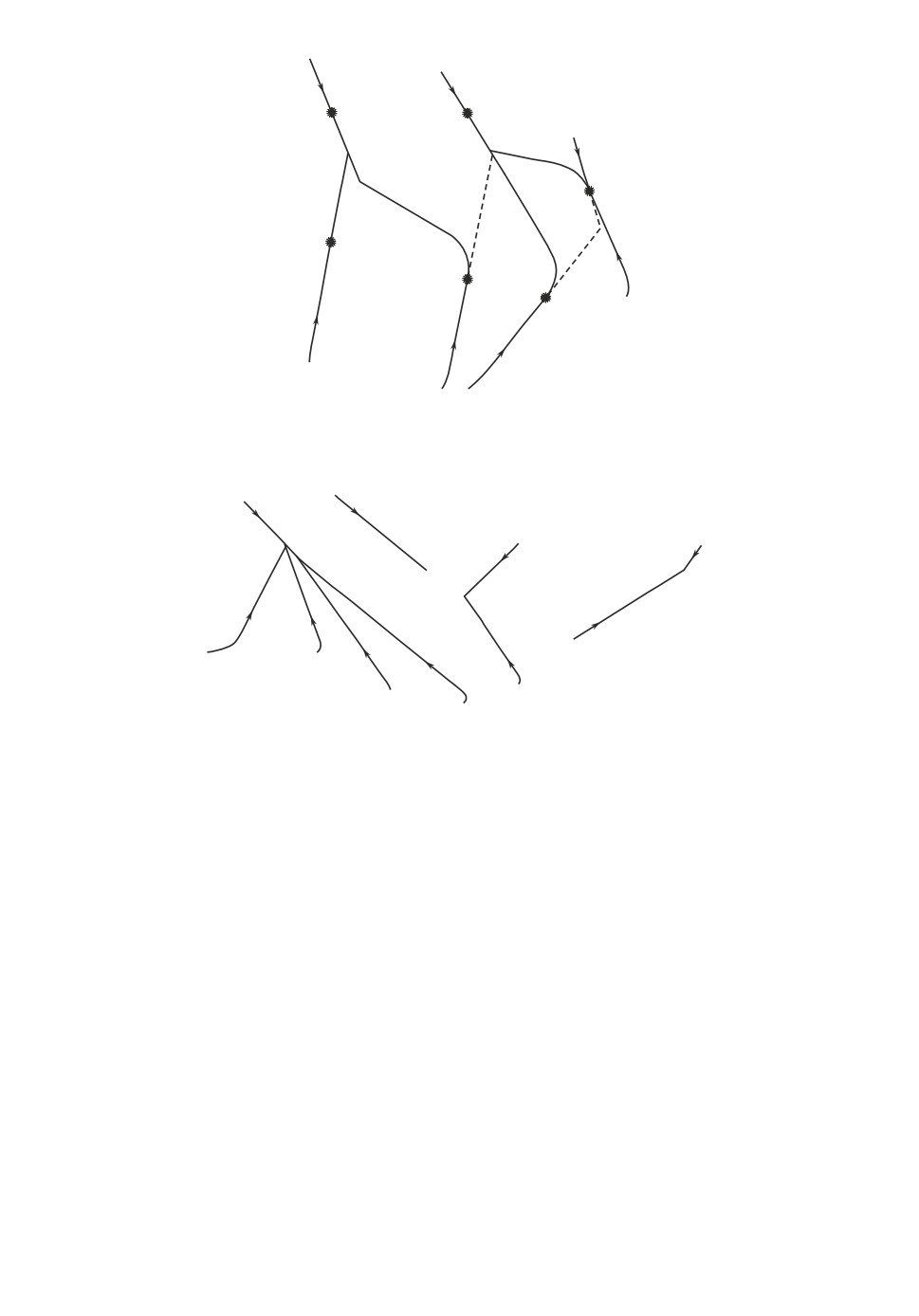
Рис. 4. Целераспределение с выбыванием перехватчика.
158, 86. Расстояние между перехватчиками и целями находится в пределах
от 15 до 22 километров.
В результате каждому перехватчику назначена своя цель, а также опреде-
лен вектор управляющего ускорения и время его действия. Построенные на
основе полученного сигнала управления траектории также показаны на ри-
сунке вместе с траекториями движения целей. Видно, что каждый перехват-
чик встречается с назначенной целью в соответствующей точке встречи Bnm.
Времена перехвата (в секундах): t1→1 = 45, t2→3 = 40, t3→4 = 38, t4→2 = 32.
Для оценки быстродействия предложенного алгоритма также проводились
расчеты при большом количестве перехватчиков и целей. Для N = M = 100
выполнение алгоритма занимает около одной секунды.
Геометрические соотношения между целями и перехватчиками для ва-
рианта выбывания перехватчиков в процессе наведения показаны на рис. 4.
В начале перехвата по результатам целераспределения на первую цель были
назначены первый и третий перехватчики, а на вторую цель — второй пере-
хватчик. Через некоторое время после начала перехвата, когда перехватчики
и цели находились в точках, отмеченных звездочками, второй перехватчик
134
Ц1
Ц3
Ц2
П4
П3
П2
П1
Рис. 5. Целераспределение с выбыванием цели.
Ц3
Ц4
Ц1
Ц2
П6
П2
П1
П5
П4
П3
Рис. 6. Целераспределение при наличии приоритетной цели.
выбывает из преследования. После этого повторно выполняется целераспре-
деление и третий перехватчик назначается на вторую цель вместо первой.
Штриховой линией показаны участки предполагаемых траекторий, соответ-
ствующие первоначальному целераспределению, которые не были реализова-
ны из-за выбывания перехватчика.
Другой, более сложный вариант целераспределения при выбывании целей
показан на рис. 5. Первоначальное целераспределение: третий перехватчик —
на первую цель, второй перехватчик — на третью цель, первый и четвертый
перехватчики — на вторую цель. В некоторый момент времени четвертый
перехватчик поражает вторую цель. Положения всех объектов в этот момент
отмечены звездочкой. После повторного выполнения целераспределения тре-
тий и второй перехватчики назначаются на первую цель, а первый и чет-
вертый — на третью. Штриховой линией показаны участки предполагаемых
траекторий, соответствующие первоначальному целераспределению, которые
не были реализованы из-за выбывания цели.
При моделировании перехвата приоритетных целей была задана требуе-
мая вероятность поражения важной цели PT ≥ 0,9 при вероятности ее по-
135
ражения отдельным перехватчиком Pi = 0,5. Один из вариантов перехвата
приоритетной цели показан на рис. 6. Шесть перехватчиков должны пере-
хватить четыре цели. Цель номер 4 считается важной, и для ее перехвата
в соответствии с формулой (24) требуется четыре перехватчика. Поэтому
в поставленной задаче перехватчиков не хватает для всех целей и задача
решается с помощью алгоритма поиска минимального потока в графе. По
результатам выполнения этого алгоритма применительно к графу, постро-
енному на основе найденных значений In,m, получается целераспределение,
представленное на рис. 6.
Также проводился расчет целераспределения 30 перехватчиков на 26 це-
лей, из которых 2 цели были важными и на каждую из них требовалось по
4 перехватчика. Тем самым для перехвата всех целей не хватало двух пере-
хватчиков. С такими данными решение задачи целераспределения заняло 5 с
с помощью стандартной функции Graph:minCost, дающей решение задачи о
потоке в графе, из системы вычислений MatLab.
Исследования, проведенные для различного пространственного положе-
ния перехватчиков и целей при различных наборах скоростей, подтвердили
работоспособность предложенного способа целераспределения при бортовых
пеленгах до ±π/2.
При целераспределении по маневрирующим целям необходимо задать вре-
мя жизни гипотез изменения скорости цели (обычно несколько секунд). По
истечении этого интервала необходимо снова решить задачу целераспределе-
ния и сформулировать сопутствующий закон управления. При этом подхо-
де назначение целей может измениться. Также, как и при учете выбывания
участников, можно изменить матрицу In,m так, чтобы предпочтение давалось
ранее назначенному распределению целей.
Точный учет ограничений по топливу можно рассматривать как дополни-
тельное ограничение, аналогичное ограничениям по скорости и ускорению,
и вычислять минимум функционала качества с учетом этого ограничения.
При этом можно использовать менее точный, но значительно более простой
метод. После вычисления матрицы In,m становятся известными предпола-
гаемые траектории перехвата. Для каждой такой траектории можно найти
расход топлива и, в случае превышения допустимого значения, исключить
этот вариант.
6. Заключение
Полученный алгоритм группового целераспределения подтвердил свою
эффективность в широком поле условий применения. Его достоинством яв-
ляется то, что он позволяет при целераспределении учесть выбывание участ-
ников и важность целей, а также обеспечить не только назначение целей
перехватчикам, но и построить предполагаемые траектории перехвата с уче-
том реальных ограничений. Предложенный алгоритм можно использовать в
комбинации с разными методами наведения. При этом по информационному
обеспечению он не накладывает принципиальных ограничений на возмож-
ность его реализации.
136
СПИСОК ЛИТЕРАТУРЫ
1.
Верба В.С. Авиационные комплексы радиолокационного дозора и наведения.
Принципы построения, проблемы разработки и особенности функционирования.
М.: Радиотехника, 2014.
2.
Верба В.С., Меркулов В.И, Пляшечник А.С. Методы и алгоритмы целераспре-
деления при групповом противоборстве // Информационно-измерительные и
управляющие системы 2018. № 1. Т. 16. C. 3-20.
3.
Ahuja R., Kumar A., Krishna J., Orlin J. Exact and heuristic algorithms for the
weapon — target assignment problem // Oper. Res. 2007. No. 6. P. 1136-1146.
4.
Zhang J., Hu C., Wang X., Yuan D. ACGA algorithm of solving weapon — target
assignment problem // Open J. Appl. Sci. 2012. V. 2. No. 4B. P. 74-77.
5.
Попов И.М., Хамзатов М.М. Война будущего: концептуальные основы и прак-
тические выводы. М.: Кучково поле, 2017.
6.
Авиационные системы радиоуправления: учебник для военных и гражданских
ВУЗов / Под ред. В.И. Меркулова. М.: Изд-во ВВИА им проф. Н.Е. Жуков-
ского, 2008.
7.
Jenkins M.A. Algorithm 493: Zeros of a real polynomial // ACM Transac. Math.
Software. 1975. No. 2. P. 178-189.
8.
Munkres J. Algorithms for assignment and transportation problems // J. Soc. Indust.
Appl. Math. 2000. No. 1. P. 32-38.
9.
Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных бор-
товых радиолокационных систем. Возможности и ограничения. М.: ИПРЖР,
2002.
10.
Зуенко Ю.А., Коростелев С.Е. Боевые самолеты России. М.: Элакос, 1994.
11.
Williams M. Superfighters: The Next Generation of Combat Aircraft. AIRTime
Publishing, Incorporated, 2002.
12.
Кристофидес Н. Теория графов. Алгоритмический подход. М.: Мир, 1978.
13.
Gross J.L., Yellen J., Zhang P. Handbook of Graph Theory. CRC Press, 2014.
Статья представлена к публикации членом редколлегии Е.Я. Рубиновичем.
Поступила в редакцию 12.10.2017
После доработки 21.06.2018
Принята к публикации 08.11.2018
137