Автоматика и телемеханика, № 4, 2019
Стохастические системы
© 2019 г. В.М. АЗАНОВ (azanov59@gmail.com),
Ю.С. КАН, д-р. физ.-мат. наук (yu_kan@mail.ru)
(Московский авиационный институт)
УСИЛЕННАЯ ОЦЕНКА ФУНКЦИИ БЕЛЛМАНА В ЗАДАЧАХ
СТОХАСТИЧЕСКОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
С ВЕРОЯТНОСТНЫМ КРИТЕРИЕМ КАЧЕСТВА1
Рассматривается задача оптимального управления дискретной стоха-
стической системой с вероятностным терминальным критерием обще-
го вида. С использованием метода динамического программирования и
свойств функции Беллмана для этой функции строятся новые двусторон-
ние границы, уточняющие известные ранее. С использованием указанных
оценок приводится обоснование применения модифицированной страте-
гии, оптимальной в двухшаговой задаче управления портфелем ценных
бумаг с учетом риска, для решения аналогичной многошаговой задачи.
На примере демонстрируются преимущества такой стратегии перед дру-
гими известными стратегиями.
Ключевые слова: дискретные системы, стохастическое оптимальное
управление, вероятностный критерий, метод динамического программи-
рования, функция Беллмана, управление портфелем ценных бумаг.
DOI: 10.1134/S0005231019040032
1. Введение
Задачи оптимального управления стохастическими марковскими система-
ми с дискретным временем и терминальным вероятностным критерием ис-
следуются с середины XX в. Интерес к исследованию данного класса задач
мотивирован аэрокосмическими [1-5], экономическими [6-13] и робототехни-
ческими [14-16] приложениями. В аэрокосмических приложениях вероятност-
ный критерий исследовался, например, в [1, 5] в рамках задачи оптимальной
импульсной коррекции траектории движения искусственного спутника Зем-
ли в окрестности геостационарной орбиты. В [1] были сформулированы до-
статочные условия оптимальности для задач оптимального управления дис-
кретными стохастическими системами с вероятностным критерием в форме
рекуррентных соотношений динамического управления. Публикации [6-13]
посвящены задачам оптимального управления портфелем ценных бумаг с
учетом риска. В модели [6-13] система управления характеризует изменение
капитала во времени, за управление принимаются доли капитала, вклады-
ваемые в безрисковый актив, имеющий детерминированную доходность, и
1 Результаты работы получены в рамках выполнения государственного задания Мин-
обрнауки № 2.2461.2017/ 4.6.
53
рисковые активы, имеющие случайную доходность с известным распределе-
нием. Вероятностный критерий моделирует вероятность достижения капита-
лом к заданному моменту времени некоторого уровня. В ходе исследования
указанных задач был разработан численный алгоритм решения [7]. Интерес
к моделям оптимального управления портфелем ценных бумаг в схожих по-
становках проявляется и в настоящее время, см., например, [17, 18].
Метод динамического программирования (МДП) является основным [1]
инструментом решения задач синтеза оптимального управления дискретны-
ми стохастическими системами с вероятностным критерием качества. Сре-
ди недавних публикаций, посвященных данной проблематике, можно выде-
лить [5, 6, 14-16]. Для ряда случаев АДП позволяет найти оптимальную стра-
тегию в классе измеримых ограниченных функций [7]. Однако в связи с “про-
клятьем размерности” по сей день нет эффективных численных методов ре-
шения уравнения динамического программирования (уравнения Беллмана).
Тем не менее в ряде случаев оптимальное управление может быть найде-
но аналитически с использованием свойств и двусторонних оценок функции
Беллмана [5, 6]. Например, в [5] было найдено аналитическое решение задачи
оптимального управления билинейной системой со скалярным ограниченным
управлением и вероятностным терминальным критерием. Такая модель ис-
пользуется в задачах импульсной коррекции орбиты геостационарного спут-
ника (см., например, [1]). Техника нахождения двусторонних оценок функции
Беллмана для синтеза оптимальных и субоптимальных управлений исполь-
зовалась, например, в [19] для других (не вероятностных) критериев.
Отдельно отметим публикации [14-16], где выделен широкий класс задач
оптимального управления с вероятностным критерием, для которого разра-
ботаны численные алгоритмы поиска оптимального управления. Указанный
класс характеризуется тем, что функция системы (функция перехода), об-
ратная связь по состоянию и точностной функционал являются полинома-
ми, система управления стационарна, а носитель распределения случайных
возмущений ограничен. Постулирование полиномиальной обратной связи по
состоянию позволило свести бесконечномерную оптимизационную задачу к
конечномерной задаче стохастического программирования большой размер-
ности.
Настоящая статья является продолжением [6], где для задач оптимального
управления дискретными стохастическими системами с вероятностным тер-
минальным критерием на основе метода динамического программирования и
свойств функции Беллмана, исследованных в [5], была найдена двусторонняя
оценка для функции Беллмана. В [5] показано, что нижняя и верхняя оценки
функции Беллмана как функции состояния определяются в результате реше-
ния соответствующих задач стохастического программирования с целевыми
функциями в форме функций вероятности. Для задачи оптимального управ-
ления портфелем ценных бумаг двусторонняя оценка была найдена в явном
виде [6], где, в частности, установлено, что управление, найденное из реше-
ний задач стохастического программирования для нижней оценки, является
асимптотически оптимальным при стремлении горизонта управления к бес-
конечности. В настоящей статье находятся усиленные оценки для функции
Беллмана, которые уточняют полученные раннее двусторонние оценки. На
54
примере задач оптимального управления портфелем ценных бумаг показано,
что полученная оценка является лучше, а стратегия, полученная в результате
решения соответствующих задач стохастического программирования, обеспе-
чивает лучшее значение вероятностного критерия по сравнению с известными
стратегиями управления в указанной задаче.
2. Постановка задачи
Рассмотрим стохастическую систему управления с дискретным временем
{
xk+1 = fk (xk,uk,ξk) ,
(1)
k = 0,N,
x0 = X,
xk ∈ Rn - вектор состояния. Начальное состояние X предполагается случай-
ным с известным распределением, uk ∈ Rm - вектор управления, ξk ∈ Rs -
случайный вектор с известным распределением, fk : Rn × Rm × Rs → Rn -
непрерывная для всех k = 0, N функция, N ∈ N - горизонт управления, при-
чем N ≥ 2.
Пусть ξk = (ξ0, . . . , ξk)T. Предположим, что ξN не зависит от X, а ξk+1
не зависит от ξk. Обозначим через Uk множество борелевских функций
uk = uk (x), значения которых удовлетворяют ограничениям uk (x) ∈ Uk, где
Uk ⊂ Rm - компактные множества.
На траекториях системы (1) задан функционал вероятности
Pϕ (u(·)) = P(Φ (xN+1 (u(·) ,ζ)) ≤ ϕ) ,
где P - вероятность, Φ : Rn → R - ограниченная снизу непрерывная функ-
(
)T
ция, ϕ ∈ R - известный скаляр, u (·) =
uT0 (·) ,... ,uTN (·)
- управление,
(
ζ =
XT,ξT0,... ,ξTN
)T.
Задача стохастического оптимального управления с вероятностным тер-
минальным критерием имеет вид
(2)
Pϕ (u(·)) → max ,
u(·)∈U
где U = U0 × . . . × UN .
Введем в рассмотрение функцию Беллмана Bk : Rn → [0, 1], которая по
определению [1] является точной верхней гранью функционала вероятности
при фиксированном текущем состоянии xk = x, т.е.
Bk (x) =
(
)
=
sup
P Φ(xN+1 (xk,uk (·),...,uN (·),ξk,...,ξN))≤ϕxk = x .
uk(·)∈Uk,...,uN (·)∈UN
В [1] установлено, что если существует стратегия uϕ (·) ∈ U, удовлетворяю-
щая следующим рекуррентным соотношениям динамического программиро-
55
вания:
[
]
uϕk (x) = arg max M
Bk+1 (fk (xk,uk,ξk))xk = x
,
uk∈Uk
[
]
Bk (x) = max M
Bk+1 (fk (xk,uk,ξk))xk = x
,
k = 0,N,
uk∈Uk
BN+1 (x) = I(-∞,ϕ] (Φ (x)),
то она оптимальна в задаче (2). Здесь M - оператор математического ожи-
дания по распределению P, IA (x) - индикаторная функция множества A.
В [5] с использованием поверхностей уровней 1 и 0 функции Беллмана,
называемых изобеллами, удалось получить модификацию соотношений ди-
намического программирования, на основе которой было получено аналити-
ческое решение некоторых аэрокосмических задач. В разделе 3 приводятся
вспомогательные утверждения из [5], составляющие методологическую осно-
ву для приводимых далее результатов по уточнению оценок для функции
Беллмана.
3. Определение изобелл и модификация уравнения Беллмана
Основной идеей, заложенной в [5], является рассмотрение уравнения Белл-
мана в разных областях пространства состояний, а именно в таких, в которых
функция Беллмана равна единице, нулю и не равна ни единице, ни нулю. Пер-
вые две области, а точнее множества, названы в [5] изобеллами уровней 1 и 0.
Они определяются следующими соотношениями [5]:
{
}
{
( )
}
Ik = x ∈ Rn : Bk (x) = 1 , Ok = x ∈ Rn
:
Bk x
= 0 , k = 0,N.
Рассмотрим также множество, где функция Беллмана не равна ни 1, ни 0,
Bk = Rn \ {Ik ∪ Ok} .
Отметим, что из определения множеств Ik, Bk, Ok следует, что
⎧
⎨Bk (x) = 1,
x∈Ik,
Ik ∪ Bk ∪ Ok = Rn,
Bk (x) ∈ (0,1) ,
x∈Bk,
⎩
Bk (x) = 0,
x∈Ok.
В статьях [5, 6] исследованы важные свойства изобелл уровней 1 и 0, с по-
мощью которых установлены новые свойства функции Беллмана. Указанные
свойства объединены в одну лемму 1.
Лемма 1. Справедливы следующие утверждения:
1. Множества Ik удовлетворяют реккурентным соотношениям в обрат-
ном времени k = 0, N :
{
}
Ik = x ∈ Rn :
∃uk ∈ Uk : P(fk (x,uk,ξk) ∈ Ik+1) = 1 ,
{
}
IN+1 = x ∈ Rn : Φ (x) ≤ ϕ ;
56
2. Множества Ok удовлетворяют реккурентным соотношениям в об-
ратном времени k = 0, N :
{
}
Ok = x ∈ Rn :
∀uk ∈ Uk : P(fk (x,uk,ξk) ∈ Ok+1) = 1 ,
{
}
ON+1 = x ∈ Rn : Φ (x) > ϕ ;
3. Для xk ∈ Ik оптимальным управлением на шаге k является любой
элемент из множества UIk (xk):
{
}
UIk (xk) = u ∈ Uk : P(fk (xk,u,ξk) ∈ Ik+1) = 1
4. Для xk ∈ Ok оптимальным управлением на шаге k является любой
элемент из множества Uk;
5. Уравнение Беллмана в области x ∈ Bk допускает представление
{
(3) Bk (x) = max P (fk (x, uk, ξk) ∈ Ik+1) + P (fk (x, uk, ξk) ∈ Bk+1) ×
uk∈Uk
[
]}
× M Bk+1 (fk (x,uk,ξk))fk (x, uk, ξk) ∈ Bk+1
;
6. Для x ∈ Bk и uk ∈ Uk справедлива система неравенств
{
M [Bk+1 (fk (x, uk, ξk))] ≥ P (fk (x, uk, ξk) ∈ Ik+1) ,
(4)
M [Bk+1 (fk (x, uk, ξk))] ≤ 1 - P (fk (x, uk, ξk) ∈ Ok+1) ;
7. Для x ∈ Bk функция Беллмана удовлетворяет двустороннему неравен-
ству
(5)
Bk (x) ≤ Bk (x) ≤ Bk
(x) ,
где Bk (x) - нижняя, а Bk (x) - верхняя оценки функции Беллмана
Bk (x) = sup P(fk (x,uk,ξk) ∈ Ik+1) ,
uk∈Uk
Bk (x) = sup {1 - P(fk (x,uk,ξk) ∈ Ok+1)} ,
uk∈Uk
причем BN (x) = BN (x) = BN (x).
Пункты 1 и 2 леммы 1 устанавливают рекуррентную формулу для вычис-
ления изобелл, достоинством которой является ее “независимость” от функ-
ции Беллмана. П. 3 позволяет найти оптимальное управление при x ∈ Ik,
избегая решения сложных оптимизационных задач, путем решения вероят-
ностного уравнения. П. 4 закрывает вопрос об оптимальном управлении
при x ∈ Ok. П. 5 отражает “модифицированное” уравнение Беллмана в обла-
сти Bk, которое по сути является следствием применения формулы полного
57
математического ожидания в правой части классического уравнения Беллма-
на. П. 6 является следствием п. 5 и представляет собой двустороннюю оценку
для функции правой части уравнения Беллмана, из которой получается дву-
сторонняя оценка для самой функции Беллмана п. 7 (см. [6]).
Отметим, что п. 1-4 леммы 1 позволяют в ряде случаев аналитически
найти изобеллы, оптимальное управление при x ∈ Ik и x ∈ Ok и соответ-
ствующие решения задач стохастического программирования для нижней и
верхней оценок функции Беллмана [5, 6]. В некоторых частных случаях с
использованием оценок п. 5 удается найти также и оптимальное управление
при x ∈ Bk [5]. Тем не менее даже в задачах с достаточно простой струк-
турой (см., например, задачу оптимального управления портфелем ценных
бумаг [20]) с одномерным пространством состояний вопрос об оптимальном
управлении при x ∈ Bk является нерешенным. Таким образом, к настоящему
времени не найдено аналитическое решение указанной задачи для случая за-
данного горизонта управления (только для случая N = 1 [12]). Тем не менее
в [6] с использованием результата п. 6 было найдено управление, обеспечи-
вающее асимптотическую оптимальность (N → ∞).
В разделе 2 приводится обобщение результата п. 6, а именно усиленная
оценка функции Беллмана. Как будет показано далее, она позволяет найти
субоптимальную стратегию в задаче управления портфелем ценных бумаг
с заданным горизонтом управления, которая оказывается лучше известных
стратегий в смысле функционала вероятности.
4. Основной результат
Поскольку вопрос об оптимальном управлении для областей пространства
состояний Ik, Ok считается закрытым (см. п. 1-4 леммы 1), исследуем новые
свойства функции Беллмана для x ∈ Bk.
Рассмотрим рекуррентные соотношения в дискретном времени l = 0, k для
функции Bkl : Rn → [0, 1]
⎧
[
]
⎨Bkl (x) = sup M Bkl+1 (fk (xk,uk,ξk))xk = x , l = 0, k,
(6)
uk∈Uk
⎩
Bkk+1 (x) = II
(x)
k+1
и функции Bkl : Rn → [0, 1]
⎧
[
]
⎨Bkl (x) = sup M Bkl+1 (fk (xk,uk,ξk))xk = x , l = 0, k,
(7)
uk∈Uk
⎩
Bkk+1 (x) = II
k+1∪Bk+1 (x).
Граничное условие для указанных последовательностей задано в момент вре-
мени k. Нетрудно видеть, что выполнены Bkk (x) = Bk (x) и Bkk (x) = Bk (x).
Следующая теорема устанавливает усиленную двустороннюю оценку для
функции Беллмана и является основным результатом настоящей статьи.
58
Теорема. Для x ∈ Bk функция Беллмана удовлетворяет двусторонне-
му неравенству
(8)
max
Blk (x) ≤ Bk (x) ≤ min Blk
(x),
l=k,N
l=k,N
где функции Blk (x) и Blk (x) удовлетворяют рекуррентным соотношени-
ям (6), (7).
Доказательство теоремы приведено в Приложении.
Отметим важные свойства функций в левой и правой частях неравен-
ства (8)
⎧
⎪Bkl (x) = Bkl (x) = 1,
x∈Ik,
⎨
k
Bkl (x) = 1, B
(x) = 0, x ∈ Bk,
∀l = 0,k,
∀k = 0,N.
l
⎪
⎩
Bkl (x) = Bkl (x) = 0,
x∈Ok,
Задачи (6), (7) по сути являются уравнениями метода динамического про-
граммирования (МДП) для 2N - 2 задач стохастического оптимального
управления с вероятностным терминальным критерием.
Воспользуемся результатами раздела 4 при решении задачи управления
портфелем ценных бумаг.
5. Управление портфелем ценных бумаг
Рассмотрим задачу управления портфелем ценных бумаг с вероятност-
ным терминальным критерием [9-12]. Пусть X - размер стартового капитала,
xk - размер капитала на начало k-го года, u1k - доля xk капитала, вклады-
ваемого в безрисковый инструмент (например, в надежный банк), имеющий
доходность b, u2k - доля капитала xk, вкладываемая в рисковый актив, харак-
теризующийся случайной доходностью ξk ∼ R [-1, a], имеющей равномерное
распределение на отрезке [-1, a], где -1 < b < a. Динамику капитала будем
описывать конечно-разностным соотношением [9-12]
{
(
)
xk+1 = xk
1+u1kb+u2kξk
,
(9)
k = 0,N.
x0 = X,
Множество Uk имеет вид
{
}
Uk = U = u ∈ R2 : u1 + u2 = 1, ui ≥ 0, i = 1,2 , k = 0,N.
Первое ограничение на компоненты вектора uk моделирует тот факт, что в
каждом k-м году осуществляется вложение всего капитала xk. Второе ограни-
чение на компоненты вектора uk характеризует запрет операции “short sales”
(взятие средств в долг). В отличие от исходных предположений в данном
примере начальное состояние x0 = X является детерминированной величи-
ной.
59
Рассматривается задача
(10)
P(-xN+1 ≤ ϕ) → max ,
u(·)∈U
где ϕ < 0 - фиксированный скаляр. Задача (10) заключается в максимизации
вероятности того, что уровень капитала к началу (N + 1)-го года окажется
не меньше фиксированного уровня (-ϕ).
Система (9) рассматривалась в [10-12] для случая N = 1 (двухшаговая
постановка). При этом в [10] рассмотрен случай усеченного нормального,
а в [11, 12] - равномерного распределения случайной величины ξk. Настоя-
щая модель соответствует модели из [11, 12], обобщенной на случай заданного
горизонта управления N.
Отметим, что в [10] было найдено аналитическое решение задачи (10) для
случая N = 1, при этом для k = N оптимальное управление и функция Белл-
мана определяются выражениями:
⎧
(
]
ϕ
⎪
⎨(0, 1)T , x ∈
-∞,-
,
1+b
(11)
uϕN (x) = v1 (x,ϕ) =
[
)
⎪
ϕ
⎩(1, 0)T , x ∈ -
,+∞
,
1+b
⎧
(
]
⎪
ϕ
⎪0,
x∈
-∞,-
,
⎪
1+a
⎨
(
)
ϕ
ϕ
ϕ
(12)
BN (x) = J1 (x,ϕ) =
1+
,
x∈
-
,-
,
⎪
x(1 + a)
1+a
1+b
⎪
[
)
⎪
ϕ
⎩1,
x∈
-
,+∞
,
1+b
а для k = N - 1 оптимальное управление и функция Беллмана имеют вид:
⎧
(
]
⎪
ϕ
⎪(0, 1)T , x ∈
-∞,-
,
⎪
(1 + b)2
⎪
⎪(
)T
⎪
ϕ
ϕ
⎪
1+
,-
,
⎪
(1 + a) (1 + b)
(1 + a) (1 + b)
⎨
⎛
(
)
⎞
1+a
(13) uϕN-1 (x) = v2 (x, ϕ) =
1 + ln
1+b
⎪
⎠,
x ∈ ⎝-ϕ
,-ϕ
⎪
⎪
(1 + b)2
(1 + b)(1 + a)
⎪
⎪
⎡
(
)
⎞
⎪
1+a
⎪
1 + ln
1+b
⎪
1, 0)T , x ∈ ⎣-ϕ
,+∞⎠,
⎩(
(1 + b) (1 + a)
60
(14) BN-1 (x) = J2 (x, ϕ) =
⎧
(
]
⎪
ϕ
⎪0,
x∈
-∞,-
,
⎪
(1 + a)2
⎪
⎪
(
(
))
⎪
(
]
⎪
ϕ 1 + ln
-x(1+a)2
⎪
ϕ
ϕ
ϕ
⎪1+
,
x∈
-
,-
,
2
⎪
x (1 + a)
(1 + a)2
(1 + a) (1 + b)
⎪
⎪
(
(
))
(
(
))
⎛
⎤
⎪
1+a
1+a
⎨
ϕ 1+ln
ϕ 1+ln
1+b
ϕ
1+b
1+
,
x∈⎝-
,-
⎦,
2
=⎪⎪
x (1 + a)
(1 + a)(1 + b)
(1 + a)(1 + b)
⎪
⎪
⎪
(
(
))
⎛
(
(
))
⎞
⎪
1+a
1+a
ϕ(1 + b) ln
ϕ 1+ln
⎪
1+b
1+b
ϕ
⎪1+
,
x∈⎝-
,-
⎠,
⎪
(ϕ + x(1 + a)(1 + b))(1 + a)
(1 + a) (1 + b)
(1 + b)2
⎪
⎪
⎪
[
)
⎪
ϕ
⎪
,
x∈
-
,+∞
⎩1
2
(1 + b)
В [6] найдены изобеллы уровней 1 и 0 для функции Беллмана в задаче (10):
[
)
Ik =
ϕIk , +∞
,
ϕIk = -ϕ (1 + b)k-N-1 ,
(
]
Ok =
-∞,ϕOk
,
ϕOk = -ϕ (1 + a)k-N-1 .
Из этих соотношений, используя п. 7 леммы 1, получаем верхнюю и нижнюю
оценки для функции Беллмана.
Утверждение 1. Справедливы утверждения:
1. Решение задач стохастического программирования (6) для k = 0, N - 1
и l = k имеет вид
[
]
ukk (x) = arg max M Bkk (fk (xk,uk,ξk))xk = x
=
uk∈Uk
(
)
(
)
(
)
= arg max
P x
1+u1kb+u2kξk
≥ϕI
= v1 x,-ϕI
,
k+1
k+1
uk∈U
а оптимальное значение целевой функции равно
[
]
Bkk (x) = max M Bkk (fk (xk,uk,ξk))xk = x
=
uk∈Uk
(
)
(
)
(
)
= max
P x
1+u1kb+u2kξk
≥ϕI
= J1 x,-ϕI
;
k+1
k+1
uk∈U
2. Решение задач стохастического программирования (7) для k = 0, N - 1
и l = k имеет вид
[
]
ukk (x) = arg max M Bkk (fk (xk,uk,ξk))xk = x
=
uk∈Uk
(
)
(
)
(
)
= arg max
P x
1+u1kb+u2kξk
≥ϕO
k+1
= v1 x,-ϕO
k+1
,
uk∈U
61
а оптимальное значение целевой функции равно
[
]
Bkk (x) = max M Bkk (fk (xk,uk,ξk))xk = x
=
uk∈Uk
(
(
)
)
(
)
= max
P
x
1+u1kb+u2kξk
≥ϕOk+1
=J1
x,-ϕOk+1
,
uk∈U
где функции v1 : R × R → R2 и J1 : R × R → [0, 1] определяются выражения-
ми (11) и (12) соответственно.
Доказательство утверждения 1 заключается в подстановке пара-
метров (-ϕIk+1) и (-ϕOk+1) вместо параметра ϕ в выражения для оптималь-
ного управления и функции Беллмана при k = N (12).
Как видно из приведенных выражений, верхняя Bkk (x) и нижняя Bkk (x)
оценки функции Беллмана совпадают с функцией Беллмана при k = N с
точностью до параметров ϕ, -ϕIk+1 и -ϕOk+1. Отсюда с учетом рекуррент-
ных соотношений (6) и (7) делаем вывод, что функции BN-1 (x), Bk+1k (x)
и Bk+1k(x) тоже совпадают с точностью до тех же параметров. Приведем ре-
шение задач стохастического программирования (6) и (7).
Утверждение 2. Справедливы утверждения:
1. Решение задач стохастического программирования (6) для k = 0, N - 2
и l = k + 1 имеет вид
[
]
(
)
uk+1k (x) = arg max M Bk+1k+1 (fk (xk,uk,ξk))xk = x
= v2 x,-ϕI
k+2
,
uk∈Uk
а оптимальное значение целевой функции равно
[
]
(
)
Bk+1k (x) = max M Bk+1k+1 (fk (xk,uk,ξk))xk = x
= J2 x,-ϕI
;
k+2
uk∈Uk
2. Решение задач стохастического программирования (7) для k = 0, N - 2
и l = k + 1 имеет вид
[
]
(
)
uk+1k (x) = arg max M Bk+1k+1 (fk (xk,uk,ξk))xk = x
= v2 x,-ϕO
,
k+2
uk∈Uk
а оптимальное значение целевой функции равно
[
]
(
)
Bk+1k (x) = max M Bk+1k+1 (fk (xk,uk,ξk))xk = x
= J2 x,-ϕO
k+2
,
uk∈Uk
где функции v2 : R × R → R2 и J2 : R × R → [0, 1] определяются выражения-
ми (13) и (14) соответственно.
Доказательство утверждения 2 заключается в подстановке пара-
метров (-ϕIk+2) и (-ϕOk+2) вместо параметра ϕ в выражения для оптималь-
ного управления и функции Беллмана при k = N - 1 (14).
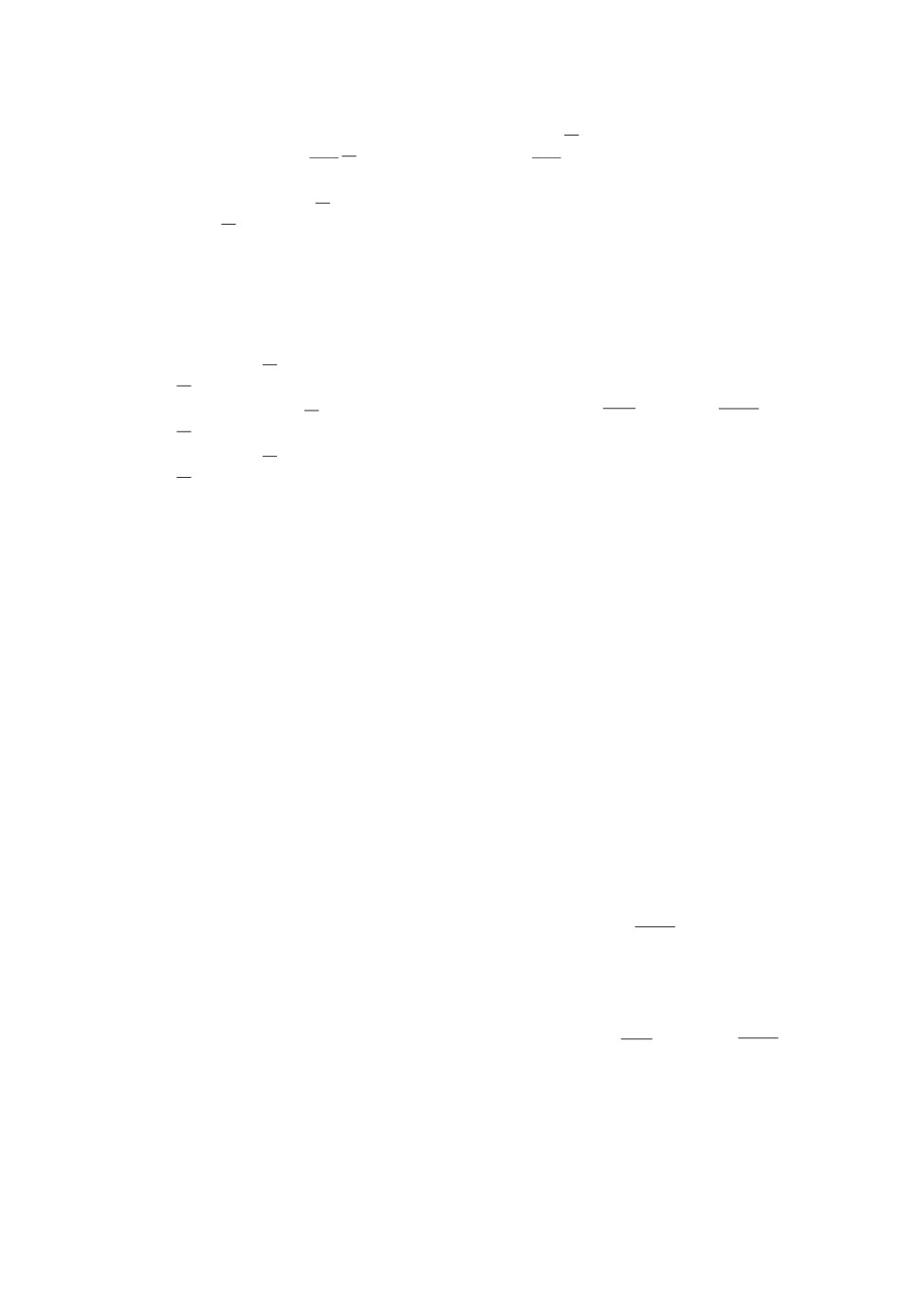
На рис. 1 изображены двусторонние оценки для функции Беллмана для
следующих значений параметров: N = 2, k = 0, ϕ = -1,2, a = 1,2, b = 0,05.
62
1,00
0,75
0,50
0,25
0
0
0,25
0,50
0,75
1,00
Рис. 1. Двусторонние оценки функции Беллмана. Жирная
k
k+1
линия - B
k
(x), штрихпунктирная - B
k
(x), пунктирная -
Bk+1k (x), точечная - Bkk (x).
а
б
1,00
1,00
0,75
0,75
0,50
0,50
0,25
0,25
0
0
0
1
2
3
0
2
4
в
г
1,00
1,00
0,75
0,75
0,50
0,50
0,25
0,25
0
0
0
0,5
1,0
1,5
2,0
0
1
2
3
4
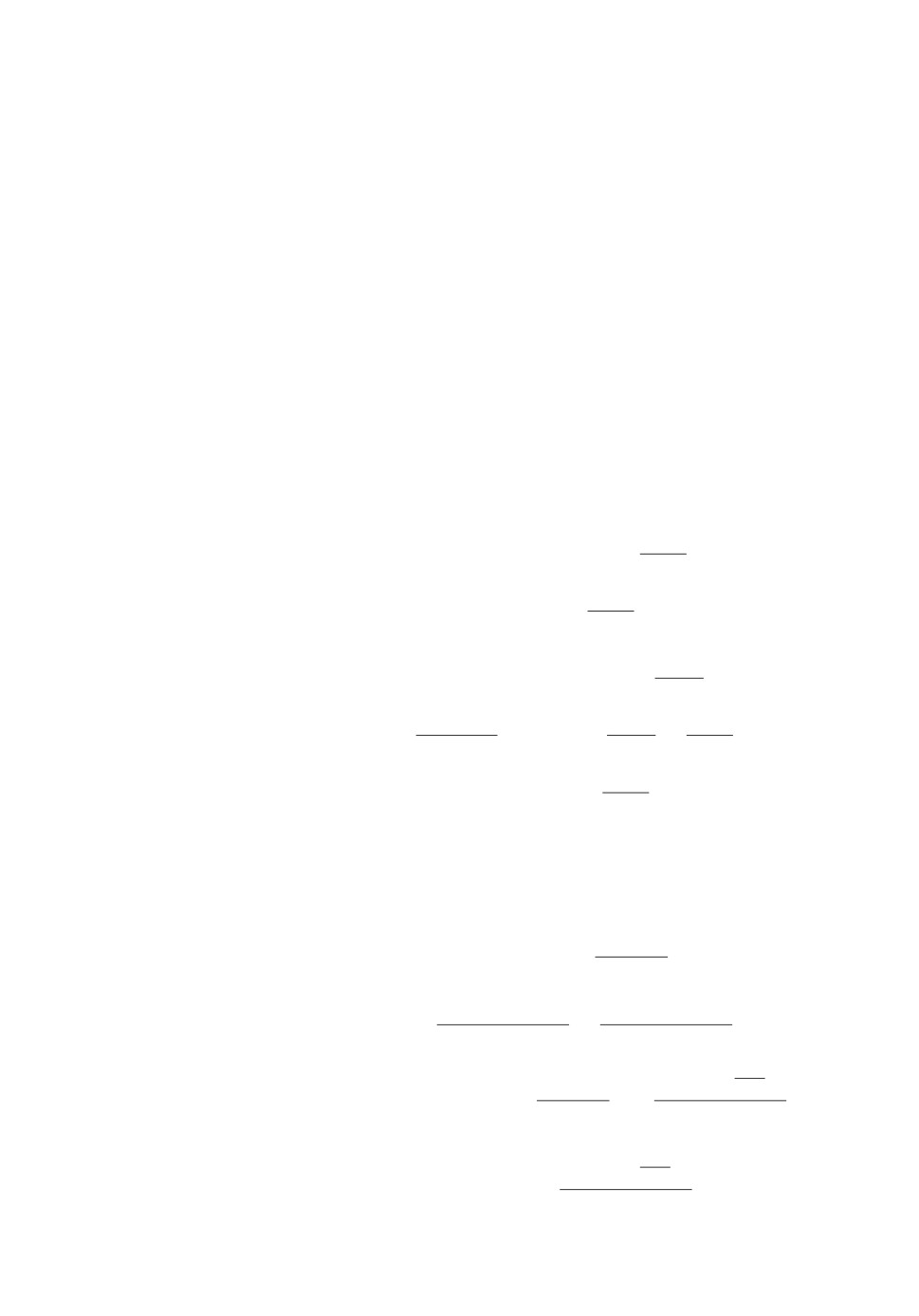
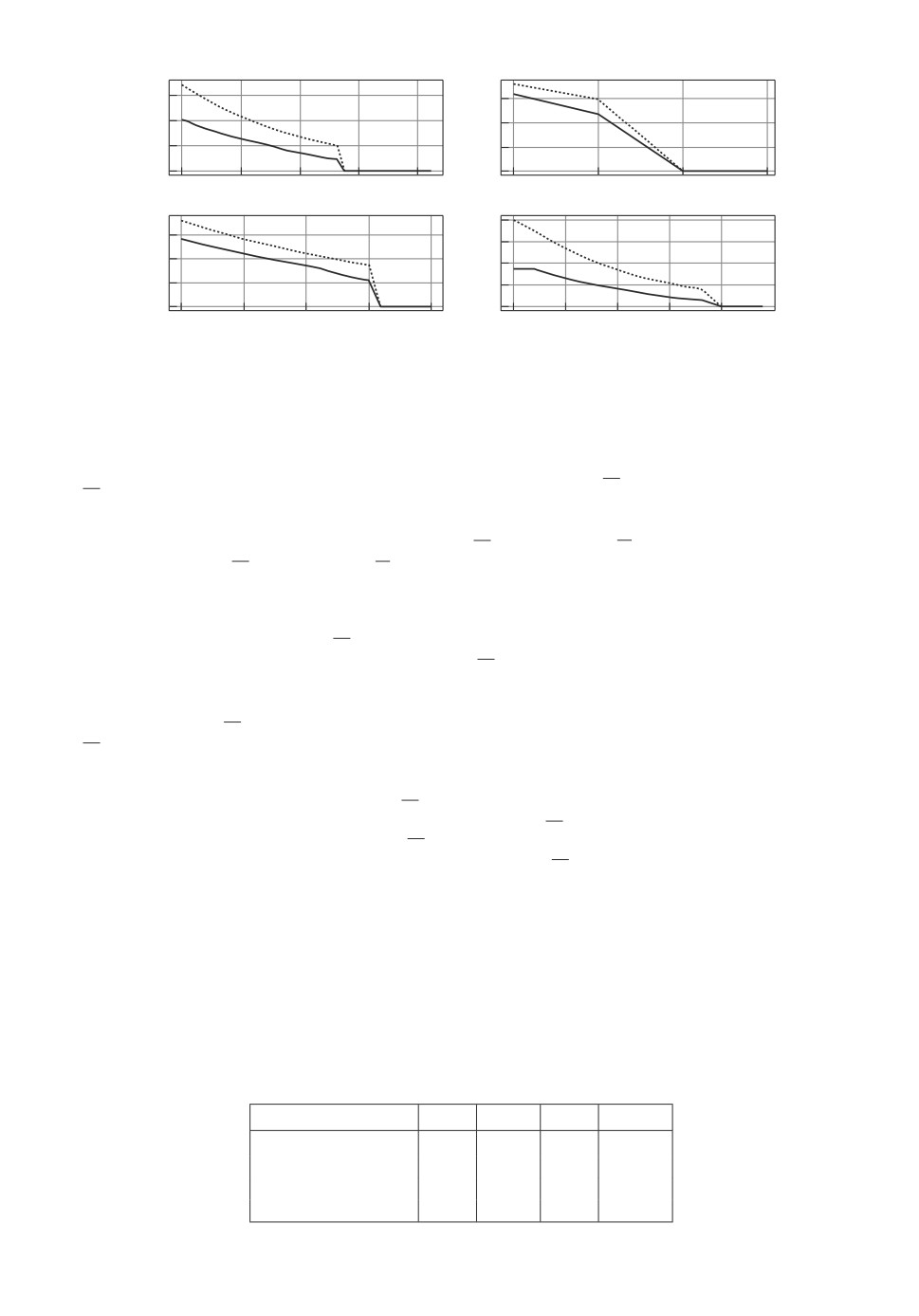
Рис. 2. Двусторонние оценки функции Беллмана.
Из графика видно, что нижняя и верхняя оценки (8) для функции Беллма-
на при l = k + 1 существенно точнее оценок при k = l, т.е. найденных в [5].
Другими словами, выполнены Bkk (x) > Bk+1k (x) и Bkk (x) < Bk+1k (x). Проведем
еще несколько экспериментов при других значениях параметров, занесенных
в табл. 1. Графики оценок функции Беллмана для случаев а-г приведены на
рис. 2.
Из графиков рис. 2 видно, что в некоторых случаях нижние, а в неко-
торых - верхние оценки функции Беллмана практически совпадают. Тем не
менее во всех случаях двусторонняя оценка (8) при l = k + 1 оказывается
точнее оценки при l = k.
Исследуем теперь усиленную оценку для функции оптимального значе-
ния вероятностного критерия. Отметим, что стратегии ukk (x) и uk+1k (x) яв-
ляются субоптимальными в исходной задаче, поскольку максимизирует ниж-
ние границы (см. (6) при l = k и l = k + 1) функции Беллмана. Причем
в [6] доказано, что стратегия ukk (x) при определенных условиях является
Таблица 1. Значение вероятностного критерия
№ эксперимента N
ϕ
a
b
а
2
-4
3,2
0,05
б
2
-10
1,12
0,2
в
6
-3
3,5
0,05
г
6
-15
0,5
0,2
63
а
б
0,75
0,6
0,50
0,4
0,25
0,2
0
0
0
10
20
30
40
0
1
2
3
в
г
1,00
0,75
0,75
0,50
0,50
0,25
0,25
0
0
0
5
10
15
20
0
2,5
5,0
7,5
10,0
12,5
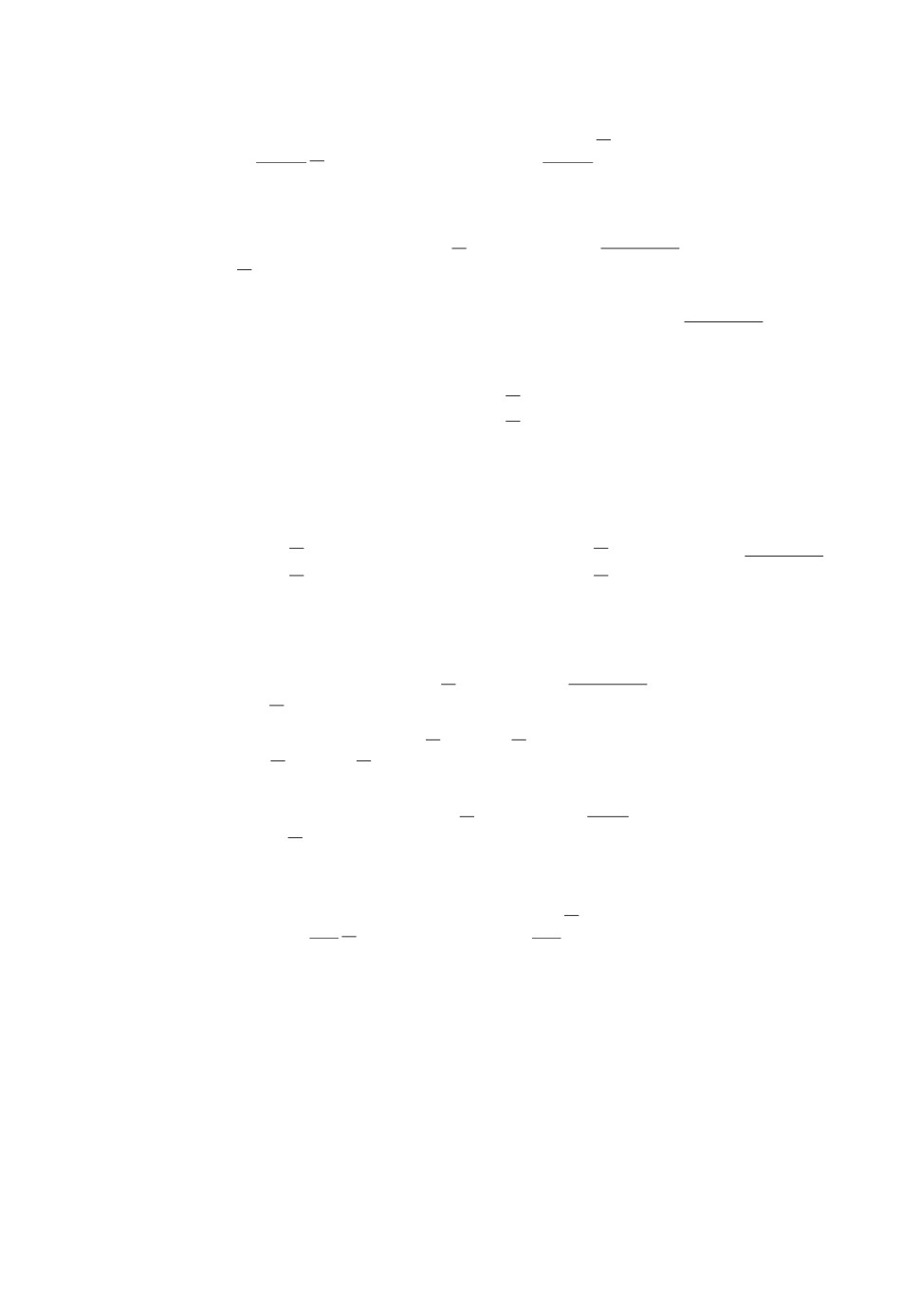
Рис. 3. Функции ΔF0 (точечная линия) и ΔF1 (жирная линия)
в зависимости от N.
асимптотически оптимальной (N → ∞) и совпадает с так называемой “рис-
ковой стратегией”. Введем в рассмотрение функции Fl : R × R × N → [0, 1] и
Fl : R × R × N → [0,1]:
Fl (ϕ,X,N) = Bl0 (X) , Fl (ϕ,X,N) = Bl0 (X) .
В [6] было доказано, что
[
]
(15)
lim F0 (ϕ, X, N) - F0 (ϕ, X, N)
= 0.
N→∞
Используя утверждения
1
и
2, можно получить явный вид функций
Fl (ϕ,X,N) и Fl (ϕ,X,N) при l = 0 и l = 1.
Проведем сравнение функций
ΔF0 (ϕ,X,N) = F0 (ϕ,X,N) - F0 (ϕ,X,N) и
ΔF1 (ϕ,X,N) = F1 (ϕ,X,N) - F1 (ϕ,X,N) ,
как функций аргумента N, т.е. горизонта управления. Рассмотрим 4 экспе-
римента, входные данные которых занесены в табл. 2. Отметим, что входные
параметры подбирались так, чтобы для всех N > 2 верхние границы функ-
ции оптимального значения вероятностного критерия не были равны нулю
(в противном случае оптимальное значение критерия равно нулю). На рис. 3
изображены их графики функций ΔF0 и ΔF1 от аргумента N для случа-
ев а-г.
Таблица 2. Значение вероятностного критерия
№ эксперимента X
ϕ
a
b
а
1,01
-4
3,2
0,05
б
1,01
-2,2
1,12
0,2
в
1,01
-2,5
1,5
0,05
г
1,01
-10
5,5
0,2
64
Таблица 3. Значения вероятностного критерия
Стратегия a = 1,12 a = 1,2 a = 1,3 a = 1,9
uk+1k
0,611
0,645
0,669
0,783
ukk
0,594
0,623
0,664
0,769
uLk
0
0,501
0,548
0,592
Из рис. 3 видно, что оценка функции Беллмана при l = k + 1 “сходится”
быстрее оценки функции Беллмана при l = k.
Аналитическое исследование свойств найденных стратегий затруднено их
нетривиальной структурой, в частности нелинейностью по состоянию. Про-
ведем сравнение известных стратегий управления портфелем ценных бумаг
(см. раздел 5) со стратегией uk+1k (x) (п. 1 утверждения 2). Рассматриваются
рисковая стратегия [21] (п. 1 утверждения 1)
{
(1, 0)T , x ≥ -ϕ (1 + b)k-N-1 ,
ukk (x) = uRk (x) =
(0, 1)T , x < -ϕ (1 + b)k-N-1 ,
k = 0,N,
и логарифмическая стратегия Келли [20]
[
(
)]
(16) uLk = arg max
M ln
1+u1kb+u2kξk
=
uk∈U
[
(
(
)
)
1
(
(
)
)
1+b
1+u2k
+ au2k
= arg max
1+b
1+u2k
+ au2k
ln
-
uk∈U (1 + a)u2k
e
(
(
))]
(
(
))
u1
+b
1+u2
k
k
-
u1k + b
1+u2k
ln
,
k = 0,N.
e
Оптимизационную задачу (16) можно свести [20] к задаче выпуклого про-
граммирования со скалярной стратегией
[
1
(1+b(1+ ũk)+aũk )
(17)
ũLk = arg max
(1 + b (1 + ũk) + aũk) ln
-
0≤ũk≤1 (1 + a)ũk
e
)]
(1 - ũk + b(1 + ũk)
- (1 - ũk + b (1 + ũk)) ln
,
k = 0,N,
e
(
)T
при этом uLk =
1-ũLk, ũLk
Зададим следующие числовые значения параметров [12]: N = 3, X = 1,
b = 0,05, ϕ = -1,2. Параметр a будем варьировать. Для численного построе-
ния оценок вероятностного критерия Pϕ (u (·)) используется метод Монте
Карло по выборке из 2000 реализаций, а для численного поиска логариф-
мической стратегии (задача (17)) используется метод дихотомии. Результаты
вычислений сведены в табл. 3.
Из табл. 3 видно, что стратегия uk+1k превосходит известные стратегии по
значению вероятностного критерия.
65
6. Заключение
На основе метода динамического программирования и изобелл для за-
дач оптимального управления дискретными стохастическими системами с
вероятностным терминальным критерием получена усиленная двусторонняя
оценка для функции Беллмана. Показано, что данная оценка является точнее
оценки [6], полученной с использованием изобелл уровней 1 и 0. По аналогии
с [6] с использованием усиленной двусторонней оценки выведены соотноше-
ния для поиска субоптимальной стратегии, эфективность которой проверена
на задаче оптимального управления портфелем ценных бумаг с вероятност-
ным критерием в многошаговой постановке. В данной задаче субоптималь-
ная стратегия найдена в явном виде. Результаты численного эксперимента
показали, что полученная стратегия является лучше известных стратегий в
смысле значений функционала вероятности.
ПРИЛОЖЕНИЕ
Доказательство теоремы. Рассмотрим шаг k = N метода динами-
ческого программирования. C учетом п. 7 леммы 1 получаем, что неравенства
для функции Беллмана превращаются в равенства BN (x) = BN (x) = BN (x).
Перейдем к шагу k = N - 1 метода динамического программирования. Ис-
пользуя п. 7 леммы 1 получаем оценку
BN-1 (x) ≤ BN-1 (x) ≤ BN-1 (x).
Легко видеть, что функции левых частей соотношений (6) и (7) в силу гранич-
ных условий совпадают с нижей и верхней оценками для функции Беллмана
(п. 7 леммы 1).
Пусть теперь k = N - 2. Выполнив подстановку
x = xN-1 = fN-2(xN-2,uN-2,ξN-2),
с учетом свойств математического ожидания получим
{
[
]
M[BN-1 (fN-2 (x,uN-2,ξN-2))] ≥ M
,
BN-1(fN-2(x,uN-2,ξN-2))
[
]
M[BN (fN-2 (x,uN-2,ξN-2))] ≤ M
BN-1 (fN-2 (x,uN-2,ξN-2))
,
откуда, взяв супремум по uN-2 ∈ UN-2 в обеих частях неравенств, получаем
⎧
[
]
⎨BN-2 (x) ≥ sup M
BN-1 (fN-2 (x,uN-2,ξN-2))
= BN-1N-2 (x),
uN-2∈UN-2
[
]
⎩BN-2 (x) ≤ sup M
BN-1 (fN-2 (x,uN-2,ξN-2))
= BN-1N-2 (x),
uN-2∈UN-2
откуда с учетом неравенства п. 7 леммы 1, а также равенств Bkk (x) = Bk (x)
и Bkk (x) = Bk (x) для всех k = 0,N имеем, что
(Π.1)
max
BlN-2 (x) ≤ BN-2 (x) ≤ max BlN-2
(x) .
l=N-2,N
l=N-2,N
66
Теперь рассмотрим произвольный шаг k + 1, где k ≤ N - 2. Предположим,
что с учетом (П.1) выполнено неравенство
(Π.2)
max
Blk+1 (x) ≤ Bk+1 (x) ≤ min Blk+1
(x) ,
l=k+1,N
l=k+1,N
тогда получаем эквивалентную систему неравенств
Blk+1 (x) ≤ Bk+1 (x) ≤ Blk+1 (x) , l = k + 1,N.
Выполнив подстановку x = xk+1 = fk (xk, uk, ξk), с учетом свойств математи-
ческого ожидания получим систему неравенств для всех l = k + 1, N
⎧
[
]
[
]
⎨M Bk+1 (fk (xk,uk,ξk))xk = x
≥ M Blk+1 (fk (xk,uk,ξk))xk = x ,
[
]
[
]
⎩M Bk+1 (fk (xk,uk,ξk))xk = x
≤ M Blk+1 (fk (xk,uk,ξk))xk = x ,
откуда, взяв супремум по uk ∈ Uk в обеих частях неравенств, получаем
⎧
[
]
⎨Bk (x) ≥ sup M Blk+1 (fk (xk,uk,ξk))xk = x
= Blk (x),
uk∈Uk
[
]
l = k + 1,N,
⎩Bk (x) ≤ sup M Blk+1 (fk (xk,uk,ξk))xk = x
= Blk (x),
uk∈Uk
откуда имеем
Blk (x) ≤ Bk (x) ≤ Blk (x) , l = k + 1, N.
С учетом равенств Bkk (x) = Bk (x), Bkk (x) = Bk (x) и неравенства п. 7 леммы 1
получаем
Blk (x) ≤ Bk (x) ≤ Blk (x) , l = k, N,
откуда окончательно имеем, что
(Π.3)
max
Blk (x) ≤ Bk (x) ≤ min Blk
(x).
l=k,N
l=k,N
В результате доказано, что из (П.2) следует (П.3) для всех k, поэтому с учетом
математической индукции из (П.1) следует и (П.3).
Теорема доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Малышев В.В., Кибзун А.И. Анализ и синтез высокоточного управления лета-
тельными аппаратами. М.: Машиностроение, 1987.
2. Красильщиков М.Н., Малышев В.В., Федоров А.В. Автономная реализация
динамических операций на геостационарной орбите. I. Формализация задачи
управления // Изв. РАН. ТиСУ. 2015. № 6. С. 82-95.
67
3.
Малышев В.В., Старков А.В., Федоров А.В. Cинтез оптимального управления
при решении задачи удержания космического аппарата в орбитальной группи-
ровке // Космонавтика и ракетостроение. 2012. № 4. С 150-158.
4.
Малышев В.В., Старков А.В., Федоров А.В. Совмещение задач удержания и
уклонения в окрестности опорной геостационарной орбиты // Вестн. Москов-
ского городского педагогич. ун-та. Сер. Экономика. 2013. № 1. С 68-74.
5.
Азанов В.М., Кан Ю.С. Синтез оптимальных стратегий в задачах управле-
ния стохастическими дискретными системами по критерию вероятности // АиТ.
2017. № 6. С. 57-83.
Azanov V.M., Kan Yu.S. Design of Optimal Strategies in the Problems of Discrete
System Control by the Probabilistic Criterion // Autom. Remote Control. 2017.
V. 78. No. 6. P. 1006-1027.
6.
Азанов В.М., Кан Ю.С. Двухсторонняя оценка функции Беллмана в задачах
стохастического оптимального управления дискретными системами с вероят-
ностным критерием // АиТ. 2018. № 2. С. 3-18.
Azanov V.M., Kan Yu.S. Bilateral Estimation of the Bellman Function in the
Problems of Optimal Stochastic Control of Discrete Systems by the Probabilistic
Performance Criterion // Autom. Remote Control. 2018. V. 79. No. 2. P. 203-215.
7.
Кибзун А.И., Игнатов А.Н. О существовании оптимальных стратегий в задаче
управления стохастической системой с дискретным временем по вероятностному
критерию // АиТ. 2017. № 10. С. 139-154.
Kibzun A.I., Ignatov A.N. On the Existence of Optimal Strategies in the Control
Problem for a Stochastic Discrete Time System with Respect to the Probability
Criterion // Autom. Remote Control. 2017. V. 78. No. 10. P. 1845-1856.
8.
Кибзун А.И., Игнатов А.Н. Сведение двухшаговой задачи стохастического оп-
тимального управления с билинейной моделью к задаче смешанного целочис-
ленного линейного программирования // АиТ. 2016. № 12. С. 89-111.
Kibzun A.I., Ignatov A.N. Reduction of the Two-Step Problem of Stochastic Optimal
Control with Bilinear Model to the Problem of Mixed Integer Linear Programming //
Autom. Remote Control. 2016. V. 77. No. 12. P. 2175-2192.
9.
Кибзун А.И., Игнатов А.Н. Двухшаговая задача формирования портфеля цен-
ных бумаг из двух рисковых активов по вероятностному критерию // АиТ. 2015.
№ 7. С. 78-100.
Kibzun A.I., Ignatov A.N. The Two-Step Problem of Investment Portfolio Selection
from two Risk Assets via the Probability Criterion // Autom. Remote Control. 2015.
V. 76. No. 7. P. 1201-1220.
10.
Кибзун А.И., Кузнецов Е.А. Оптимальное управление портфелем ценных бу-
маг // АиТ. 2001. № 9. С. 101-113.
Kibzun A.I., Kuznetsov E.A. Optimal Control of the Portfolio // Autom. Remote
Control. 2001. V. 62. No. 9. P. 1489-1501.
11.
Бунто Т.В., Кан Ю.С. Оптимальное управление по квантильному критерию
портфелем ценных бумаг с ненулевой вероятностью разорения // АиТ. 2013.
№ 5. С. 114-136.
Bunto T.V., Kan Yu.S. Quantile Criterion-based Control of the Securities Portfolio
with a Nonzero Ruin Probability // Autom. Remote Control. 2013. V. 74. No. 5.
P. 811-828.
12.
Григорьев П.В., Кан Ю.С. Оптимальное управление по квантильному критерию
портфелем ценных бумаг // АиТ. 2004. № 2. С. 179-197.
68
Grigor’ev P.V., Kan Yu.S. Optimal Control of the Investment Portfolio with Respect
to the Quantile Criterion // Autom. Remote Control. 2004. V. 65. No. 2. P. 319-336.
13.
Вишняков Б.В., Кибзун А.И. Оптимизация двухшаговой модели изменения ка-
питала по различным статистическим критериям // АиТ. 2005. № 7. С. 126-143.
Vishnyakov B.V., Kibzun A.I. A Two-Step Capital Variation Model: Optimization
by Different Statistical Criteria // Autom. Remote Control. 2005. V. 66. No. 7.
P. 1137-1152.
14.
Jasour A.M., Aybat N.S., Lagoa C.M. Semidefinite Programming For Chance
Constrained Optimization Over Semialgebraic Sets // SIAM J. Optimization. 2015.
№ 25 (3). P. 1411-1440.
15.
Jasour A.M., Lagoa C.M. Convex Chance Constrained Model Predictive Control //
arXiv preprint arXiv:1603.07413, 2016.
16.
Jasour A.M., Lagoa C.M. Convex Relaxations of a Probabilistically Robust Control
Design Problem // 52nd IEEE Conf. on Decision and Control. 2013. P. 1892-1897.
17.
Hsieh Chung-Han, Barmish B. Ross On Drawdown-Modulated Feedback Control in
Stock Trading // IFAC Proc. July 2017. V. 50. No. 1. P. 952-958.
18.
Hsieh Chung-Han, Barmish B. Ross, Gubner J. At What Frequency Should the Kelly
Bettor Bet? // Proc. IEEE Amer. Control Conf. (ACC). Milwaukee. WI. January
2018.
19.
Норкин Б.В. О численном решении задачи стохастического оптимального управ-
ления дивидендной политикой страховой компании // Компьютерная матема-
тика. 2014. № 1. С. 131-140.
20.
Кан Ю.С., Кибзун А.И. Задачи стохастического программирования с вероят-
ностными критериями. М.: Физматлит, 2009.
21.
Kibzun A.I., Kan Yu.S. Stochastic Programming Problems with Probability and
Quantile Functions. Chichester: Wiley, 1996.
Статья представлена к публикации членом редколлегии Б.М. Миллером.
Поступила в редакцию 22.04.2018
После доработки 29.10.2018
Принята к публикации 08.11.2018
69