Автоматика и телемеханика, № 4, 2019
Управление в технических системах
© 2019 г. В.Н. БУКОВ, д-р техн. наук (v_bukov@mail.ru)
(ОАО “Бортовые аэронавигационные системы”, Москва),
А.М. БРОННИКОВ, д-р техн. наук (bronnikov_a_m@mail.ru)
(Московский государственный технический университет им. Н.Э. Баумана),
А.М. АГЕЕВ, канд. техн. наук (ageev_bbc@mail.ru),
И.Ф. ГАМАЮНОВ, канд. техн. наук (ilyagama@gmail.com)
(ВУНЦ ВВС “Военно-воздушная академия
им. проф. Н.Е. Жуковского и Ю.А. Гагарина”, Воронеж)
ИНТЕГРАЦИЯ КОМПЛЕКСА ОБОРУДОВАНИЯ
ВЫБРАННОЙ КОНФИГУРАЦИИ
Ставится и решается задача синтеза динамических, с операторами дис-
кретного сдвига во времени, интеграционных матриц, моделирующих об-
работку данных в интегрированной вычислительной среде создаваемого
комплекса оборудования. Развиваемый подход предусматривает предва-
рительный выбор конфигурации комплекса путем задания пары конфигу-
рационных матриц, моделирующих безынерционные входные и выходные
интерфейсы всех его неоднородных и неуниверсальных компонентов. По-
лучены формульные выражения для полного и суженных множеств инте-
грационных матриц, обеспечивающих при выбранных конфигурационных
матрицах неизменность предписанной комплексу целевой функции. При-
водится методический пример, демонстрирующий методику и эффектив-
ность предлагаемого подхода.
Ключевые слова: комплекс оборудования, управление избыточностью, ре-
конфигурация, целевая функция, передаточная матрица, интеграцион-
ный базис, канонизация матриц, делители нуля, гипотеза Букова.
DOI: 10.1134/S0005231019040068
1. Введение
Избыточность комплекса оборудования (КО) по определению предпола-
гает наличие компонентов, число и возможности которых превышают ми-
нимально необходимые для применения КО по предназначению. При этом
для осуществления тех или иных функций, а также в порядке реагирования
на внешние вызовы КО может принимать соответствующую конфигурацию
(схему или способ объединения компонентов) и изменять цели функциониро-
вания.
Так, в [1] с помощью декомпозиционного метода размещения полюсов ре-
шается задача сохранения заданных характеристик устойчивости воздушно-
го судна при реконфигурации системы управления полетом в условиях воз-
никновения отказов исполнительной подсистемы. Учет перекрестных связей
между каналами управления позволяет полностью компенсировать послед-
ствия отказов исполнительной подсистемы в каждом из каналов управления
105
при соблюдении условий полной управляемости модели движения летатель-
ного аппарата как динамической системы.
Статья [2] посвящена вопросам структурно-функциональной реконфигу-
рации сложных объектов на основе формирования гипермультиграфа макро-
состояний, связывающего текущее и возможные будущие состояния объекта.
Решение строится как оптимальное в некотором смысле управление потоками
информации и отказов.
В [3] приводится описание отказоустойчивой системы с реконфигурацией,
моделируемой в пакете Matlab Simulink + Stateflow. Готовность к работе при
любых отказах или сбоях достигается за счет организации двухканальной
структуры с поблочным дублированием, перекрестными связями и восста-
навливающим органом, выполняющим логическую функцию “И”. Система
остается работоспособной до тех пор, пока одновременно не откажет какая-
либо из определенных пар блоков.
Авторы [4] для управления реконфигурированием перестраиваемой бор-
товой вычислительной системы малых космических аппаратов предлагают
учитывать такие параметры, как накопленная доза ионизирующего излуче-
ния и ее интенсивность, нагрев, частота сбоев и отказов. Устойчивость же
работы системы обеспечивается своевременным переводом элементов в пас-
сивное состояние посредством реконфигурирования.
В [5] для прогнозирования структурной устойчивости автоматизирован-
ных систем управления космическими аппаратами предлагается методика,
включающая три шага: построение схемы функциональной целостности, мо-
делирование различных сценариев, вычисление нечетких значений показате-
лей структурной устойчивости.
Статья [6] содержит основные принципы функционирования мультиагент-
ного диспетчера, используемого в современных и перспективных информаци-
онно-управляющих системах атомных электростанций и авиационных ком-
плексов дальнего радиолокационного обнаружения. При этом предусмотрена
автоматическая подстройка архитектуры вычислителей под решаемую зада-
чу, обеспечивающая высокую скорость при минимальных аппаратурных за-
тратах.
В [7] в качестве базовой подсистемы для соединения всех подсистем авио-
ники рассматривается подсистема цифровой обработки данных, состоящая
из избыточных центральных процессорных блоков, а также сопутствующих
модулей ввода/вывода, соответствующего программного обеспечения, циф-
ровых шин данных и многочисленных удаленных терминалов.
Статья [8] содержит библиографический обзор активных отказоустойчи-
вых систем управления, существующих подходов к детектированию отказов
и диагностике применительно к техническим системам. На основе 376 источ-
ников, датируемых с 1971 г., осуществлен всесторонний анализ исследований
в прошлом, настоящем и сделан прогноз на будущее.
В [9] ставится задача управления избыточностью КО и формулируется ре-
шение этой задачи с помощью программно-аппаратных средств, названных
супервизорами конфигураций. Затем в [10-13] развивается аналитический
подход к формированию множества альтернативных конфигураций избыточ-
106
ных КО, а также анализируется взаимосвязь аналитических решений с су-
первизорами конфигураций КО. Статья [14] посвящена проверке (тестирова-
нию) выбранной конфигурации неоднородного КО на его реализуемость, т.е.
на наличие потенциальной возможности определения такой обработки сигна-
лов в его межкомпонентных связях, при которой комплекс может выполнять
предписанные целевые функции. К особенностям развиваемого подхода сле-
дует отнести: математическую строгость и логическую непротиворечивость,
формализацию описания процессов информационного обмена в КО, а также
получение решений в аналитическом виде.
2. Модель избыточного комплекса
Предметом исследований является система, называемая в дальнейшем
“объект + КО” и включающая:
объект, для которого создается комплекс оборудования и который мо-
жет непосредственно взаимодействовать, причем не единственным образом, с
некоторыми из компонентов этого комплекса (с датчиками и актюаторами);
избыточную совокупность разрозненных1, не обязательно однородных
(совместимость всех интерфейсов) и универсальных (применимость для лю-
бых функций) компонентов, предназначенных для исполнения разнообраз-
ных частных функций;
интегрированную вычислительную среду (ИВС), на которую возлагается
интеграция (объединение) разрозненных компонентов в комплекс с единой
целью функционирования, что предполагает сбор данных с выходов исполь-
зуемых компонентов реализуемой конфигурации, обработку этих данных в
соответствии с некоторыми правилами и распределение результатов обработ-
ки по входам используемых компонентов.
Поведение избыточной совокупности разрозненных компонентов и объекта
в терминах систем с дискретным временем τ = 0, 1, 2, . . . в линейном прибли-
жении описывается моделью [10, 12-14]
(1)
yτ = Dxτ , xτ+1 = Axτ + Buτ + Gvτ , xτ=0 = x0,
где yτ - метавектор (составной вектор) выходов всех компонентов на такте τ
размерности m, xτ - метавектор состояния компонентов и объекта размер-
ности n, uτ - метавектор входов компонентов для межкомпонентных связей
размерности l, vτ - метавектор входов компонентов и объекта для внешних
воздействий (внешних входов) размерности k, D - блочная числовая матрица
формирования выходов всех компонентов размеров m × n, A - блочная чис-
ловая матрица собственной динамики компонентов и объекта размеров n × n,
B - блочная числовая матрица эффективности межкомпонентных связей раз-
меров n × l, G - блочная числовая матрица эффективности внешних воздей-
ствий размеров n × k.
Линеаризованная модель функционирования ИВС может быть представ-
лена в форме передаточной матрицы (при нулевых начальных условиях2 для
1 Обособленных или необособленных как в функциональном, так и конструктивном ас-
пектах.
2 Отказ от этого предположения требует дополнительных исследований.
107
всех внутренних переменных ИВС)
(2)
uτ = Q(z)yτ ,
где z - оператор сдвига во времени на один такт вперед, Q(z) - в общем
случае дробно-рациональная полиномиальная (по оператору z) матрица раз-
меров l × m передаточных функций (передаточная матрица) от метавектора
выходов компонентов yτ к метавектору их входов для межкомпонентных свя-
зей uτ , названная конфигурационной матрицей [13].
В свою очередь, конфигурационная матрица имеет структуру:
(3)
Q(z) = CвхE(z)Cвых,
где Cвх и Cвых - распределительные матрицы размеров l × p и q × m, т.е. мат-
рицы, содержащие бинарные элементы и не более одного единичного элемен-
та в строке, названные интерфейсными матрицами [10], поскольку моделиру-
ют без учета задержек функционирование входных и выходных интерфейсов
всех компонентов за исключением объекта, E(z) - в общем случае дробно-
рациональная полиномиальная матрица размеров p × q, моделирующая об-
работку вычислительными средствами ИВС и задержек всех поступающих
данных и названная интеграционной матрицей [10].
В силу избыточности состава и функциональности компонентов конфигу-
рационная матрица Q(z) допускает варьирование, обусловленное:
выбором различных пар интерфейсных матриц Cвх и Cвых в интересах
адаптации системы в целом к изменяющимся условиям, включая корректи-
ровку возлагаемых на нее задач и парирование отказов или неправильно-
го функционирования различных компонентов, изменяться могут размеры
(p и q) и значения элементов этих матриц;
изменением настроек (значений элементов) интеграционной матрицы E(z)
в силу либо учета ресурсов, возможностей и особенностей вычислительных
средств ИВС, либо удовлетворения дополнительных требований к системе.
При этом в возможностях и ограничениях выбора Cвх и Cвых проявляется
неоднородность компонентов, а настроек E(z) - их неуниверсальность.
Термины “конфигурирование избыточного КО” и “интеграция избыточно-
го КО” будем преимущественно связывать с раздельным определением пары
интерфейсных матриц Cвх, Cвых в первом случае и интеграционной матри-
цы E(z) во втором, хотя указанная грань не всегда обладает достаточной
четкостью. Так, тождественное обнуление элементов E(z) приводит к изме-
нению конфигурации КО.
3. Постановка задачи и используемый аппарат
В качестве формальной функции, отражающей основное содержание
функционирования системы в целом, предложено [10] использовать выбороч-
ную часть ее передаточной матрицы от внешних входов vτ к выходам yτ
[
]
(z)
= D(zIn - A - BQ(z)D)-1G,
Wvy(z) = wviyj
m×k
108
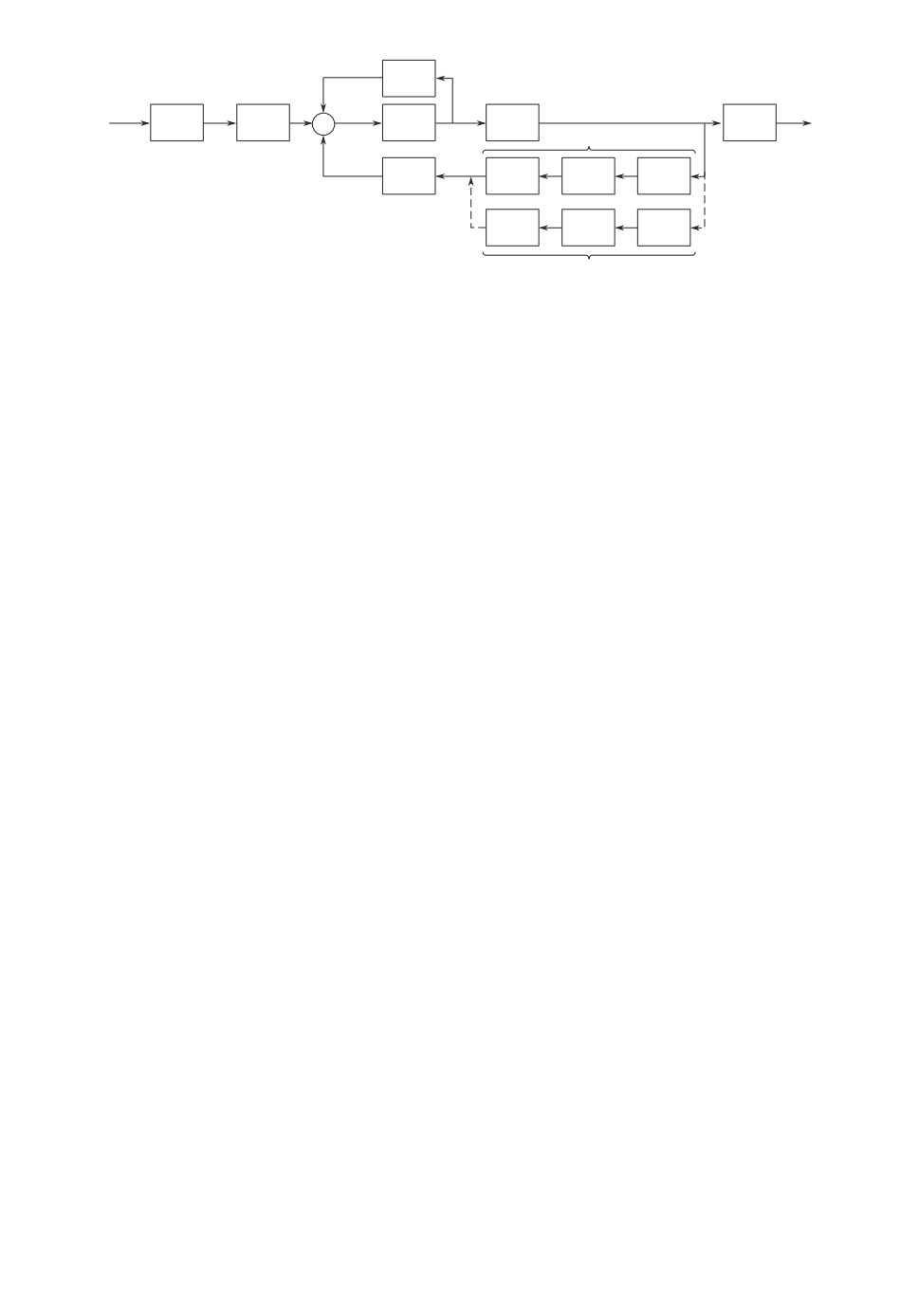
A
x
y
V
v
x + 1
Y
G
z1
D
Q
ном
u
ном
ном
B
C
Eном
C
Cвх
E
Cвых
Q
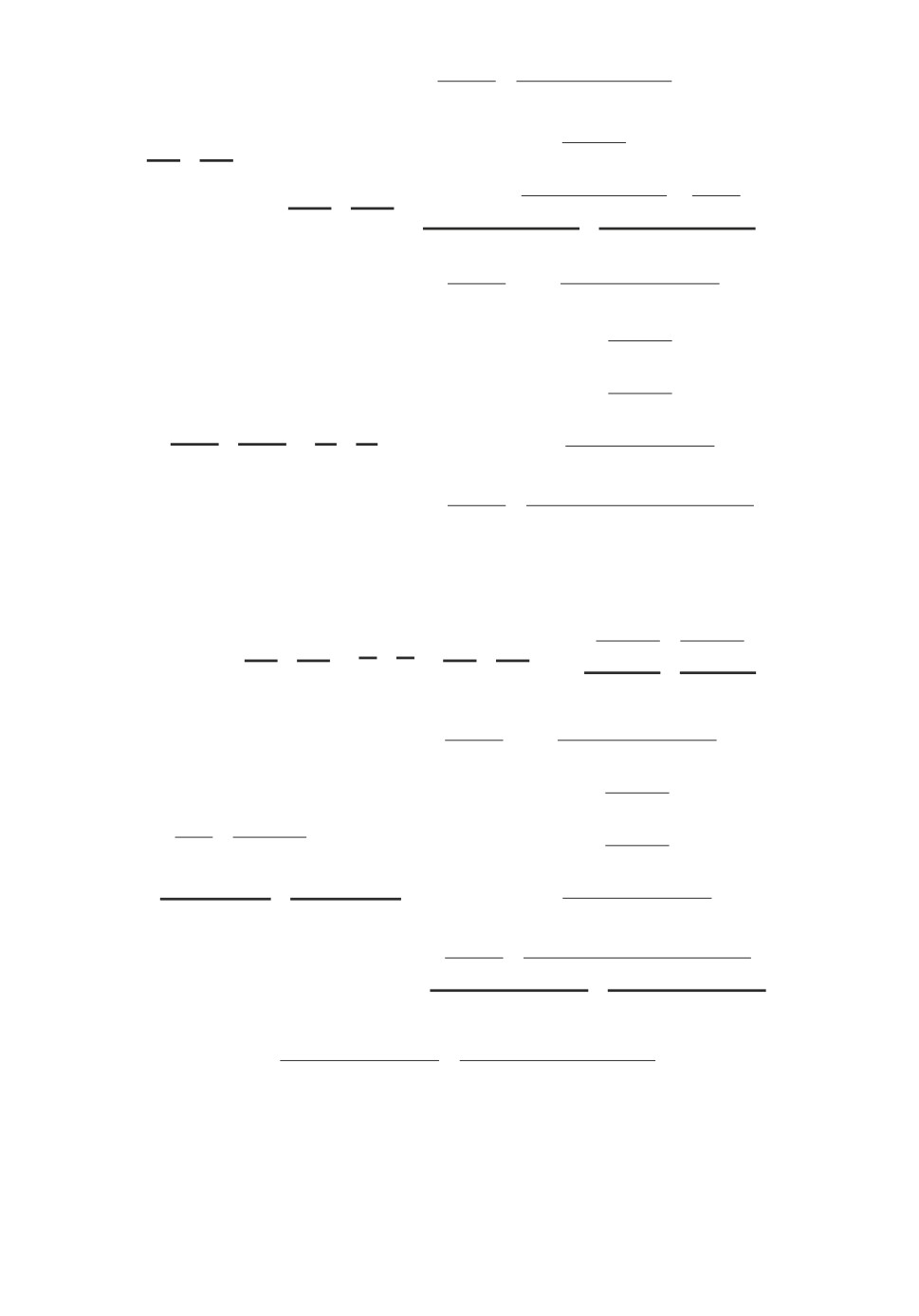
Рис. 1. Структура системы “объект + КО” с учетом тестовых входа и выхода.
полученной объединением (1)-(3), где wvi (z) - передаточная функция отy
j
i-го входа vi.τ к j-му выходу yj.τ , In - единичная матрица размеров n × n.
Матрицу, формируемую из передаточной матрицы Wvy(z) посредством весо-
вых матриц α размеров k × g и β размеров f × m на ее входе и выходе,
(4)
Φ(z) = WVY (z) = βWvy(z)α = βD(zIn - A - BQ(z)D)-1
Gα
предложено [10] называть целевой функцией КО.
Векторы Vτ и Yτ , связанные с метавекторами входов vτ и выходов yτ ком-
понентов в соответствии с формулами vτ = αVτ и Yτ = βyτ , будем называть
тестовыми входом и выходом системы. Таким образом, целевая функция (4)
представляет собой передаточную матрицу WVY (z) от тестового входа Vτ к
тестовому выходу Yτ .
Целевую функцию удобно связывать с так называемой номинальной кон-
фигурацией КО, когда выполняется равенство
Qном(z) = CномвхEном(z)Cномвых,
где все указанные матрицы имеют номинальные значения, при которых
функция (4) принимает значение Φтреб(z), удовлетворяющее разработчика.
Для знаменателя матричной дроби (4) при номинальной конфигурации ком-
плекса далее используется обозначение
Ω(z) = zIn - A - BQном(z)D.
Рисунок 1 иллюстрирует структуру системы “объект + КО”, в которой по-
мимо номинальной конфигурации КО, формализуемой матрицей Qном, пока-
зана одна из его альтернативных конфигураций, представленная матрицей Q.
С целью упрощения указания на зависимость матриц E, Eном, Q и Qном от
оператора z опущены.
Для обеспечения компактности формул введены [14] определения двух пе-
редаточных матриц для системы “объект + КО” в номинальной конфигура-
ции:
номинальная передаточная матрица по внешнему воздействию
Wvy.ном(z) = DΩ-1(z)G
109
и номинальная передаточная матрица по межкомпонентным связям
Wuy.ном(z) = DΩ-1(z)B.
С понятием “управление избыточностью технической системы” тесно свя-
заны методы решения задач варьирования ее конфигурации. В частности,
это относится к возможностям и ограничениям такого изменения конфигу-
рации КО, при котором целевая функция остается неизменной. В [14] все
матрицы Cвх и Cвых, обеспечивающие потенциальную возможность интегра-
ции комплекса (т.е. определение такой интеграционной матрицы E(z), при
которой указанное требование выполняется), относятся к допустимым. Соот-
ветствующая конфигурация КО тоже называется допустимой.
Там же сформулированы как необходимые и достаточные, так и только
достаточные условия отнесения матриц Cвх и Cвых к допустимым.
В данной статье ставится задача получения формульных выражений для
множеств интеграционных матриц E(z), соответствующих выбранной паре
допустимых альтернативных интерфейсных матриц Cвх, Cвых. Решение по-
лучено как для исходной (полной), так и для редуцированной (упрощенной)
постановок задачи [14].
Такая формулировка задачи отличается от предложенной ранее в [10], где
осуществлялся синтез интеграционной матрицы без независимого предвари-
тельного выбора интерфейсных матриц. Введенная здесь корректировка поз-
воляет разработчику-интегратору КО задавать направление поиска альтер-
нативных конфигураций с учетом различных дополнительных требований и
обстоятельств.
При решении поставленной задачи используется аппарат канонизации
матриц [15], в основе которого лежит модификация алгоритма Гаусса, позво-
ляющая любую матрицу S размеров n × m и ранга r преобразовать в сово-
купность соответствующих ей левого SL и правого SR делителей нуля макси-
мального ранга, а также левог
SL, правог
SR и сводног
S канонизаторов,
удовлетворяющих равенствам
(5)
SLS = 0, SSR = 0,
SL
SR = Ir,
S =(S)∼
SR
SL и SSS = S.
В случае отсутствия (равенства нулю) делителей нуля сводный канониза-
то
S уступает место односторонним делителям единицы3 или обратной мат-
рице [15]:
при отсутствии SL - правому делителю единицы
S
SR = SR, удовлетво-
ряющему равенству
SSR = In,
3 Канонизация матрицы S, у [оторой n ] m и r = n, может быть выполнена комбини-
рованием только столбцов и дает
SR
SR
. При этом возможное комбинирование строк,
формализуемое в этом случае о[братимой мат]ицей
SL = P, компенсируется комбинирова-
нием столбцов, приводящим к
SRP-1
SR
. В результате сводный канонизатор прини-
мает значение
S =SRP-1P =SR.
110
при отсутствии SR - левому делителю единицы
S
SL = SL, удовлетво-
ряющему равенству
SLS = Im,
при отсутствии SL и SR - обратной матрице
S =S-1.
Существующая неединственность результатов канонизации не создает
трудностей для их использования. Преимущество данного аппарата поясня-
ется в [14].
4. Интеграционный базис
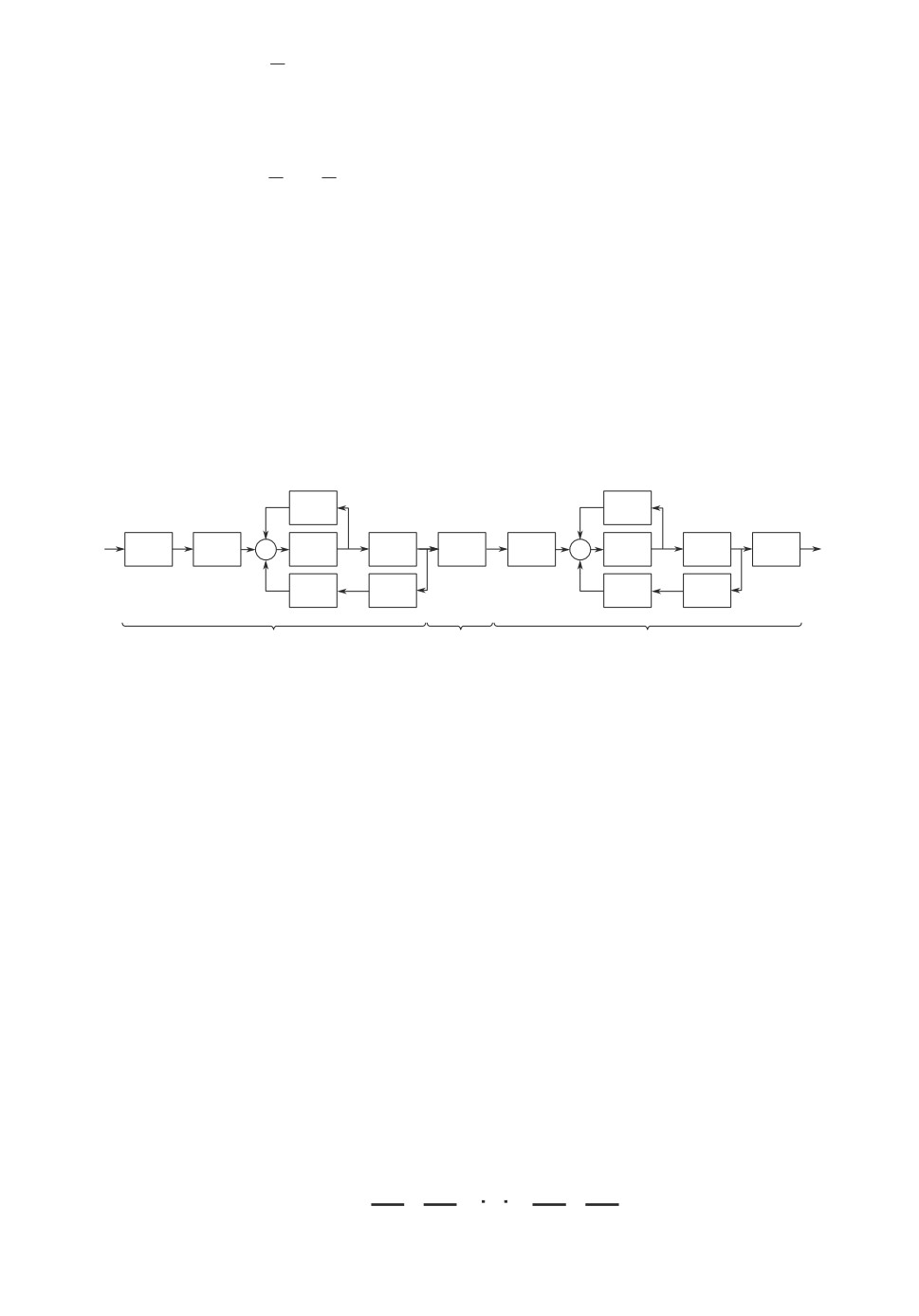
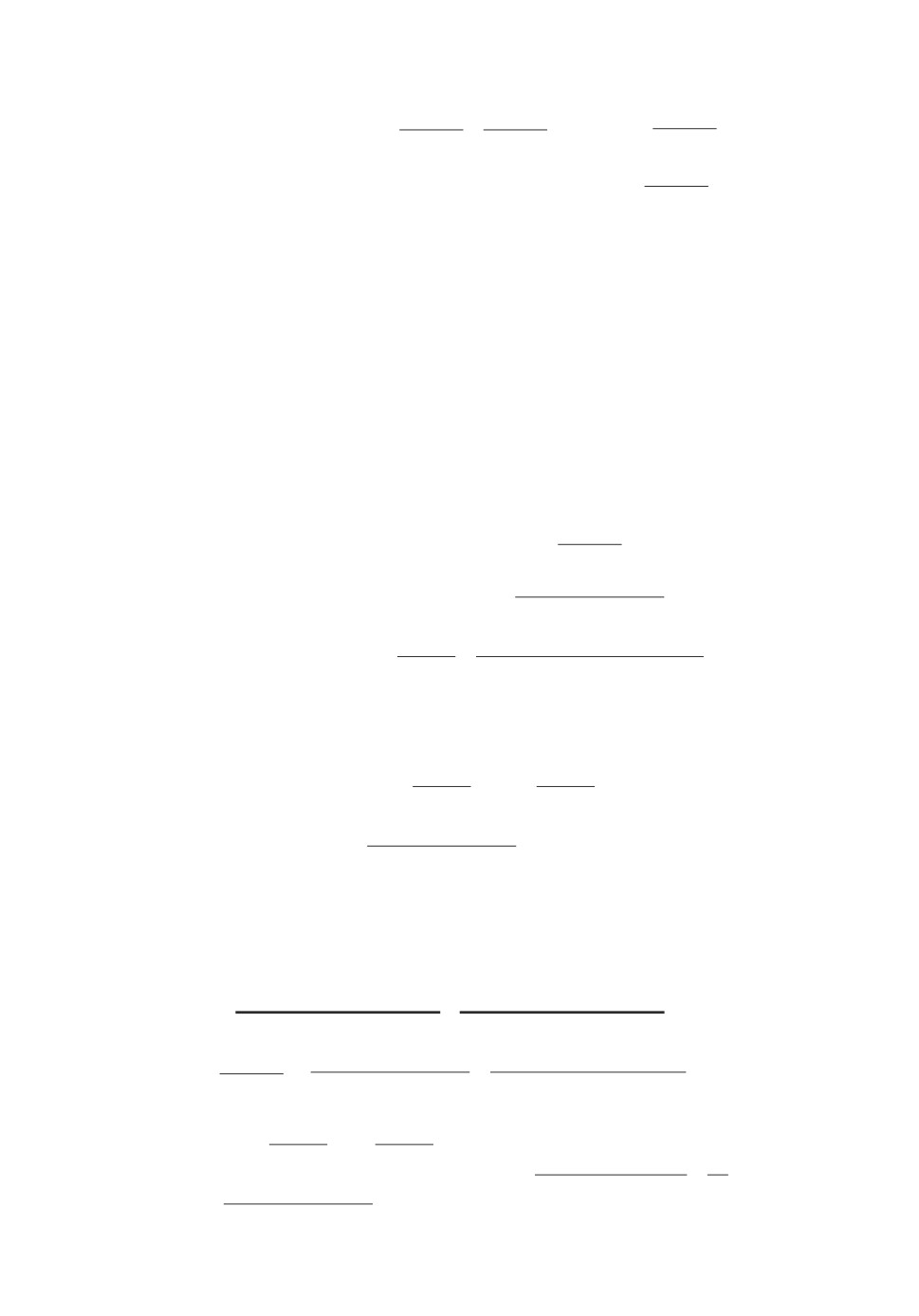
Введем в рассмотрение вспомогательную виртуальную систему, которую
будем называть базисной. Ее структура показана на рис. 2. Система пред-
ставляет собой последовательность (цепочку) трех динамических блоков (для
отличия от реальной системы метавекторы помечены штрихами и градусом)
с передаточными матрицами:
A
A
V'
v'
x'
y'
uo
x ''
y ''
Y ''
G
z1
D
Q
B
z1
D
u'
u ''
B
Qном
B
Qном
Блок 1
Блок 2
Блок 3
Рис. 2. Структура базисной системы.
блок 1, от тестового входа V′τ к выходам компонентов y′τ при номинальной
конфигурации КО:
′
(z) = Wvy.ном(z)α,
блок 2, от выходов компонентов y′τ к их входам для межкомпонентных
связей u◦τ (соответствует передаточной матрице ИВС по формуле (2)) при
конфигурации КО, для которой определяется интеграционная матрица:
◦
(z) = Q(z),
блок 3, от входов компонентов для межкомпонентных связей u◦τ к тесто-
вому выходу Y′′τ при номинальной конфигурации КО:
Wu′Y′ (z) = β
y.ном
(z).
Таким образом, передаточная матрица базисной системы при любых зна-
чениях интерфейсных Cвх, Cвых и интеграционной E(z) матриц определяется
формулой
(6)
Θ(z) = βWuy.ном(z)
Q(z)
Wvy.ном(z)α,
5
67
8
5678
5
67
8
блок 3
блок 2
блок 1
111
а в случае номинальной конфигурации Cномвх, Cномвых и Eном(z) принимает зна-
чение
(7)
Θбаз(z) = βWuy.ном(z)Qном(z)Wvy.ном(z)α,
5
67
85
67
85
67
8
блок 3
блок 2
блок 1
которое будем называть интеграционным базисом.
Принципиальной особенностью базисной системы является присутствие
двух в общем случае различных конфигурационных матриц Qном(z) и Q(z),
первая из которых (в блоках 1 и 3) зафиксирована выбором номинальной
конфигурации, а вторая (в блоке 2) варьируется при поиске альтернативной
конфигурации, эквивалентной номинальной по значению целевой функции.
Выбор такой структуры обусловлен последующим использованием базисной
системы.
В отличие от реальной системы, показанной на рис. 1, с ее целевой функ-
цией (4) в базисной системе c соответствующей передаточной матрицей (6)
тестовый вход V′τ при формировании тестового выхода Y′′τ дважды проходит
контур DΩ-1(z).
В решаемой задаче формула (7), где номинальное значение Qном(z) фигу-
рирует трижды (в каждом из блоков), играет ключевую роль. Все решения
задачи интеграции КО (в полной постановке), включая полученные ранее
условия допустимости конфигурации [14], формируются из интеграционного
базиса (7).
5. Исчерпывающее решение
Результаты по условиям допустимости интерфейсных матриц [14] полу-
чены на основе последовательности решений, представленных в [10, 12, 13].
Однако в отличие от условий допустимости, имеющих вполне лаконичный
вид, получить таким путем формулы для интеграционной матрицы не пред-
ставилось возможным в силу громоздкости промежуточных матричных кон-
струкций. Интуитивно ожидаемые возможности строгих сокращений этих
конструкций пока не проявились.
Поэтому, преследуя, главным образом, прагматические цели, авторы вы-
носят на суд формулировку соответствующей гипотезы и результаты иссле-
дования обеспеченных ею результатов.
Гипотеза Букова. Множество интеграционных матриц E(z), обес-
печивающих значение Φтреб(z) целевой функции КО, зафиксированное в его
номинальной конфигурации Qном(z) и весовых матрицах α, β, а также мно-
жество интеграционных матриц E(z), при которых передаточная мат-
рица базисной системы Θ(z) тождественно равна интеграционному бази-
су Θбаз(z), совпадают.
На формальном языке сказанное эквивалентно предположению, что нели-
нейное матричное основное уравнение интеграции системы “объект + КО” [14]
(8)
βD(zIn - A - BCвхE(z)CвыхD)-1Gα = βWvy.ном
(z)α
112
и линейное двустороннее матричное уравнение
(9)
βWuy.ном(z)CвхE(z)CвыхWvy.ном(z)α = Θбаз
(z),
получаемое приравниванием формул (6) и (7) базисной системы, имеют иден-
тичные решения относительно матрицы E(z), т.е. эквивалентны при любых
фиксированных значениях остальных матриц.
Обоснование гипотезы дано в Приложении.
На основе этой гипотезы сформулируем теорему 1, дающую решение за-
дачи в ее исходной постановке. Доказательство приведено в Приложении.
Теорема 1. Если справедлива гипотеза Букова и выполнены условия
теоремы 1 из [14] для интерфейсной матрицы Cвх
(10)
βWuy.ном(z)Cвх
LΘбаз
(z) = 0
и интерфейсной матрицы Cвых
R
(11)
Θбаз(z)CвыхWvy.ном(z)α
= 0,
то множество всех возможных интеграционных матриц E(z), соответ-
ствующих выбранной паре интерфейсных матриц Cвх, Cвых и обеспечива-
ющих значение целевой функции КО, зафиксированное в его номинальной
конфигурации Qном(z) и весовых матрицах α и β, определяется формулой
(
)∼
(
)∼
(12)
{E(z)}θ,ϑ =
βWuy.ном(z)Cвх
Θбаз(z)
CвыхWvy.ном(z)α
+
+ βWuy.ном(z)Cвх
Rθ + ϑCвыхWvy.ном(z)αL,
где θ и ϑ - произвольные матрицы подходящих размеров.
При использовании результата теоремы 1 удобно пользоваться следующи-
ми определениями:
(
{E(z)}θ,ϑ
=
βWuy.ном(z)Cвх
)∼Θбаз(z)(CвыхWvy.ном(z)α)∼
+
5
67
8
5
67
8
Общее решение
Базовое решение
L
+ βWuy.ном(z)Cвх
Rθ
+ ϑCвыхWvy.ном(z)α
5
67
8
5
67
8
Вариация столбцов решения
Вариация строк решения
Если в частном случае номинальные и альтернативные интерфейсные мат-
рицы совпадают, имея значения Cвх и Cвых соответственно, то с учетом под-
становки решения в (9) и регулярности по Нейману сводного канонизатора
(выполнение последнего из равенств (5)) формула (12) приводится к виду
{E(z)}θ,ϑ = Eном(z) + βWuy.ном(z)Cвх
Rθ + ϑCвыхWvy.ном(z)αL,
совпадающему с результатом [12] с точностью до обозначений.
113
6. Решения при упрощенных условиях
Выполнение упрощенных условий [14] допустимости интерфейсных мат-
риц Cвх и Cвых позволяет получить решения в виде множеств, отличающихся
от (12).
Следствие. Если справедлива гипотеза Букова и выполнены условия
следствия 1 из [14]:
βWuy.ном(z)CвхL = 0, CвыхWvy.ном(z)αR = 0,
то множество возможных интеграционных матриц, соответствующих
этим условиям и обеспечивающих значение целевой функции КО, зафик-
сированное в его номинальной конфигурации Qном(z) и весовых матрицах α
и β, определяется формулой
(
(13)
{E(z)}θ,ϑ =
βWuy.ном(z)Cвх
)RΘбаз(z)(CвыхWvy.ном(z)α)L+
+ βWuy.ном(z)Cвх
Rθ + ϑCвыхWvy.ном(z)αL,
где θ и ϑ - произвольные матрицы подходящих размеров.
Если же матричные произведения под знаками канонизации обратимы (от-
сутствуют левые и правые делители нуля), то формулы (12) и (13) уступают
место формуле для единственного решения
(
)-1
(
)-1
E(z) =
βWuy.ном(z)Cвх
Θбаз(z)
CвыхWvy.ном(z)α
При этом равенство E(z) = Eном(z) соответствует случаю, когда обе матрицы
Cвх и Cвых имеют номинальные значения.
Аналогично формулируется следствие, связанное с выполнением условий
следствия 2 из [14]. Справедливость таких следствий обусловлена указанным
в разделе 3 свойством канонизаторов и не требует специального доказатель-
ства.
Следующая теорема 2 позволяет использовать достаточные условия теоре-
мы 2 из [14] без опоры на сформулированную выше гипотезу. Однако получа-
емые при этом решения задачи являются редуцированными, т.е. упрощенны-
ми, в которых только частично учитывается структура целевой функции (4).
Строгое сопоставление полных и редуцированных решений выходит за рамки
данной статьи.
Теорема 2. Если выполнены условия теоремы 2 из [14]
(14)
BCвхLBQном(z)D = 0, BQном(z)DCвыхDR
= 0,
то множество интеграционных матриц КО, соответствующих выбранной
паре интерфейсных матриц Cвх, Cвых и обеспечивающих значение целевой
функции КО, зафиксированное в его номинальной конфигурации Qном(z) вне
зависимости от весовых матриц α и β, определяется формулой
(15)
{E(z)}θ,ϑ = (BCвх)∼BQном(z)D(CвыхD)∼ + BCвхRθ + ϑCвыхDL,
где θ и ϑ - произвольные матрицы подходящих размеров.
114
Доказательство теоремы и пояснение редукции приведены в Приложении.
При использовании результата теоремы 2 можно пользоваться определе-
ниями
{E(z)}θ,ϑ
= (BCвх)∼BQном(z)D(CвыхD)∼
+
5
67
8
5
67
8
Общее решение
Базовое решение
+ BCвхRθ
+ ϑCвыхDL
5
67
8
5
67
8
Вариация столбцов Вариация строк
по аналогии с теоремой 1. Здесь интеграционный базис (7) уступил место
матрице BQном(z)D. Сравнение этой матрицы с (7) показывает потерю (ре-
зультат редукции) в теореме 2 учета внутренних связей интегрируемого КО
как на входе, так и на выходе передаточной матрицы (3), моделирующей
функционирование ИВС.
Базовое решение и структура вариаций в (12), (13) и (15) зависят от реа-
лизуемых процедур канонизации [15], но это не влияет на получаемые мно-
жества решений.
7. Пример
В качестве объекта для методического примера рассмотрим описанную
в [14] упрощенную модель продольного движения самолета
⎡
⎤
⎡
⎤
⎡
⎤
⎡
⎤
⎡
⎤
⎡
⎤
x1.τ+1
a1
a2
0
x1.τ
0
0
g1
0
g2
v1.τ
[u1.τ ]
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣x2.τ+1
⎦
=
⎣a3 a4
0⎦
⎣x2.τ
⎦
+
⎣b1 b2⎦
+
⎣0
g3
g4⎦
⎣v2.τ
⎦,
u2.τ
x3.τ+1
0
a2
1
x3.τ
0
0
5 67 8
0
0
0
v3.τ
5
67
8
5
67
8
5
67
8
5
67
8
uτ
5
67
8
5 67 8
xτ+1
A
xτ
B
G
vτ
где x1 - приращение угла атаки, x2 - угловая скорость тангажа, x3 - прира-
щение угла тангажа, u1 - приращение угла отклонения стабилизатора, u2 -
приращение угла отклонения переднего горизонтального оперения, v1, v2, v3 -
внешние воздействия (различные комбинации возмущений нормальной силы,
продольного момента и сдвига ветра), ai, bi и gi - известные параметры мо-
дели, отличные от нуля.
Выходом объекта является вектор yτ , определяемый формулой
⎡
⎤
⎡
⎤
⎡
⎤
y
1.τ
1
0
0
x1.τ
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
y2.τ
0
1
0
x1.τ
x2.τ
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥⎢
⎥
⎢
⎥
⎢
y3.τ
⎥
=
⎢
0
1
0
⎥
⎣ x2.τ
⎦
=
⎢
x2.τ
⎥,
⎢
⎥
⎢
⎥
⎢
⎥
⎣ y4.τ
⎦
⎣0
0
1
⎦
x3.τ
⎣ x3.τ
⎦
5
67
8
y5.τ
−1 0 1
x3.τ - x1.τ
xτ
5
67
8
5
67
8
yτ
D
где y1 - сигнал датчика угла атаки, y2 - сигнал датчика угловой скорости
тангажа, y3 - сигнал угловой скорости тангажа комплексной навигационной
115
Таблица 1. Синтез интеграционной матрицы E(z) по формуле (12) теоремы 1
Вариация строк
значение ϑ для
Интерфейсная
матричный
№
Базовое решение
совпадения с
матрица Cвых
коэффициент
решением [14]
[
]
[
]
1
0
0
0
0
aж-a4
1
0
0
0
0
1
0
0
-a3b1
b1
⎡
⎤
1
0
0
0
0
[
]
⎣
⎦
aж-a4
aж-a4
2
0
1
0
0
0
0
[0
-1
1]
-a3b1
b1
-2b1
0
0
1
0
0
⎡
⎤
0
0
1
0
0
[
]
[
]
⎣
⎦
(aж-a4)z-aΣ
a3
z-1
aж-a4
3
0
0
0
1
0
0
1
0
a2b1
b1
-a2
b1
0
0
0
0
1
⎡
⎤
0
1
0
0
0
[
]
[
]
⎣
⎦
(aж-a4)z-aΣ
a3
z-1
aж-a4
4
0
0
0
1
0
0
1
0
a2b1
b1
-a2
b1
0
0
0
0
1
⎡
⎤
0
1
0
0
0
[
]
⎢
⎥
[
]
[
]
⎢
0
0
1
0
0
⎥
10
(aж-a4)z-aΣ
a3
0
−1
aж-a4
5
⎢
⎥
0
0
⎣
0
0
0
1
0
⎦
b1(z-1)
b1
1 -1 0 0
-a3b1
2b1
0
0
0
0
1
[
]
[
]
1
0
0
0
0
(aж-a4)z-a
Σ
a3
6
0
0
0
0
0
0
0
1
0
b1(z-1)
b1
[
]
[
]
1
0
0
0
0
(aж-a4)z-aΣ (aж-a4)(z-1)
7
0
0
0
0
0
0
1
a2b1
a2b1
[
]
[
]
0
1
0
0
0
(aж-a4)z-aΣ
a3
8
0
0
b1(z-1)
b1
0
0
0
0
1
[
]
[
]
0
0
1
0
0
(aж-a4)z-aΣ
a3
9
0
0
0
0
0
0
1
b1(z-1)
b1
⎡
⎤
0
1
0
0
0
[
]
⎣
⎦
(aж-a4)z-aΣ
a3
10
0
0
1
0
0
0
[1
-1
0]
0
b1(z-1)
b1
0
0
0
0
1
Ошибочное решение
Значение целевой функции
[
]
[
]
0
1
0
0
0
[
]
(aж-a4)(z-a1)+a2a3
a3g1
g3
11∗
0
z-aж
b1(z-a1)
(z-a4)(z-aж)
0
0
0
1
0
[
]
[
]
0
0
1
0
0
[
]
(aж-a4)(z-a1)+a2a3
a3g1
g3
12∗
0
b1(z-a1)
(z-a4)(z-aж)
z-aж
0
0
0
1
0
⎡
⎤
0
1
0
0
0
[
]
[
]
(aж-a4)(z-a1)+a2a3
a3g1
g3
13∗
⎣
0
0
1
0
0
⎦
00
b1(z-a1)
(z-a1)(z-aж)
z-aж
0
0
0
1
0
[
]
[
]
g3
14∗
[
1
0
0
0
0 ]
0
-a3b1
z-a4
∗В соответствии с [14] условия допустимости конфигурации не выполнены.
116
Таблица 2. Синтез интеграционной матрицы E(z) по формуле (15) теоремы 2
Вариация строк
значение ϑ для
Интерфейсная
матричный
№
Базовое решение
совпадения с
матрица Cвых
коэффициент
решением [14]
[
]
[
]
1
0
0
0
0
aж-a4
1
0
0
0
0
1
0
0
-a3b1
b1
⎡
⎤
1
0
0
0
0
[
]
⎣
⎦
aж-a4
aж-a4
2
0
1
0
0
0
0
[0
-1
1]
-a3b1
b1
-2b1
0
0
1
0
0
⎡
⎤
0
0
1
0
0
[
]
⎣
⎦
aж-a4
a3
3
0
0
0
1
0
0
0
b1
-a3b1
b1
0
0
0
0
1
⎡
⎤
0
1
0
0
0
[
]
⎣
⎦
aж-a4
a3
4
0
0
0
1
0
0
0
b1
-a3b1
b1
0
0
0
0
1
⎡
⎤
0
1
0
0
0
⎢
⎥
[
]
⎢
0
0
1
0
0
⎥
a3
aж-a4
5
⎢
⎥
[1
- 1 0 0]
⎣
0
0
0
1
0
⎦
0 aж-a4b1
-a3b1
b1
2b1
0
0
0
0
1
Ошибочное решение
Значение целевой функции
[
]
1
0
0
0
0
[
]
[
]
g3
6∗
0
0
-a3b1
z-a4
0
0
0
1
0
[
]
1
0
0
0
0
[
]
[
]
g3
7∗
0
0
-a3b1
z-a4
0
0
0
0
1
[
]
[
]
[
]
0
1
0
0
0
aж-a4
a3
g3(z-1)
8∗
0
b1
b1
(z-aж)(z-1)+a2a3
0
0
0
0
1
[
]
[
]
[
]
0
0
1
0
0
aж-a4
a3
g3(z-1)
9∗
0
b1
b1
(z-aж)(z-1)+a2a3
0
0
0
0
1
⎡
⎤
0
1
0
0
0
[
]
[
]
⎣
⎦
aж-a4
a3
g3(z-1)
10∗
0
0
1
0
0
0
0
b1
b1
(z-aж)(z-1)+a2a3
0
0
0
0
1
[
]
[
]
[
]
0
1
0
0
0
aж-a4
a3g1
g1(z-a1)
11∗
0
0
0
0
1
0
b1
(z-a1)(z-aж)-a2a3 (z-a1)(z-aж)-a2a3
[
]
[
]
[
]
0
0
1
0
0
aж-a4
a3g1
g1(z-a1)
12∗
0
0
0
0
1
0
b1
(z-a1)(z-aж)-a2a3 (z-a1)(z-aж)-a2a3
⎡
⎤
0
1
0
0
0
[
]
[
]
⎦
aж-a4
a3g1
g3(z-a1)
13∗ ⎣
0
0
1
0
0
0
0
b1
(z-a1)(z-aж)-a2a3 (z-a1)(z-aж)-a2a3
0
0
0
1
0
[
]
[
]
g3
14∗
[
1
0
0
0
0 ]
0
-a3b1
z-a4
∗В соответствии с [14] достаточные условия допустимости конфигурации не выполнены.
117
системы (КНС), y4 - сигнал угла тангажа КНС и y5 - сигнал угла наклона
траектории КНС.
Задачей управления является обеспечение целевой функции, т.е. желаемой
передаточной матрицы от воздействий v1 и v2 к угловой скорости тангажа
x2 = y2:
[
]
[
]
g3
(16)
Φтреб(z) =
=
0
,
wv1y2 (z) wy22 (z)
z-aж
где aж - параметр, характеризующий желаемые динамические свойства са-
молета. При этом матрицы α и β имеют значения
⎡
⎤
1
0
[
]
⎢
⎥
α=
⎣ 0 1
⎦, β=
0
1
0
0
0
0
0
Варианты номинальной конфигурации КО определяются значениями мат-
рицы Qном(z), выбор которой осуществляется разработчиком (интеграто-
ром) КО. Как показано в [14], такая матрица, обеспечивающая значение (16)
целевой функции при указанных α и β, может быть, но не обязательно, ста-
тической (без оператора z):
[
]
[
]
[
]
1
-a3
aж - a4
1
0
0
0
0
Qном =
=
0
b1
b1
0
1
0
0
0
5 67 8
5
67
8
5
67
8
Cномвх
Eном
Cномвых
(17)
⎡
⎤
-a3
aж - a4
0
0
0
=⎣ b1
b1
⎦.
0
0
0
0
0
В рассматриваемом примере имеют место матричные конструкции:
⎡
⎤
1
0
0
⎡
⎤⎡
⎤
⎢
⎥
0
0
-a3
aж - a4
0
1
0
⎢
⎥
⎢
⎥
0
0
0
⎢
⎥
BQномD =
b1
b1
⎦
0
1
0
⎣ b1 b2
⎦⎣
⎢
⎥=
⎢
⎥
0
0
0
0
0
⎣
⎦
0
0
0
0
1
−1 0 1
⎡
⎤
0
0
0
⎢
⎥
=
⎣ -a3 aж - a4
0
⎦,
0
0
0
⎡
⎤
z-a1
-a2
0
⎢
⎥
Ω(z) = zI3 - A - BQномD =
⎣
0
z-aж
0
⎦,
0
-a2
z-1
118
⎡
⎤
1
a
2
0
⎢
z-a1
(z - a1)(z - aж)
⎥
⎢
⎥
⎢
1
⎥
⎢
⎥
Ω-1(z) =
0
0
⎢
⎥.
⎢
z-aж
⎥
⎣
⎦
a2
1
0
(z - aж)(z - 1) z - 1
В соответствии с развиваемым подходом альтернативные конфигурации
КО порождаются выбором альтернативных значений интерфейсных матриц
Cвх и Cвых.
Поскольку множество возможных (допустимых) матриц Cвх ограниче-
но тремя вариантами, не приводящими к интересному разнообразию реше-
ний [14], ограничимся рассмотрением только номинального значения Cномвх в
соответствии с (17).
По аналогии с [14] все решения по теореме 1 для фиксированной ин-
терфейсной матрицы Cномвх и различных интерфейсных матриц Cвых (поми-
мо Cномвых) сведены в табл. 1, где использовано дополнительное обозначение
aΣ = aж + a2a3 - a4. В правом столбце таблицы указано значение произволь-
ного сомножителя ϑ, подстановка которого в слагаемое “Вариация строк ре-
шения” формулы (12) дает решение, совпадающее с показанным в [14] реше-
нием, полученным ранее путем подбора.
В табл. 2 аналогично представлены решения по теореме 2.
В обеих таблицах для вариантов, которым соответствует выполнение усло-
вий допустимости конфигурации, решение дает желаемый результат в смысле
значения целевой функции (16). В то же время для вариантов с невыпол-
нением условий допустимости формулы (12) и (15) дают решения, которые
не обеспечивают Φтреб(z) (варианты 11-14 табл. 1, а также варианты 6-14
табл. 2).
Рассмотрим детально использование только теоремы 1 и только для одного
из варьируемых значений матрицы Cвых.
Матричные конструкции, входящие в (12), имеют вид
⎡
⎤
1
0
0
⎢
0
1
0
⎥
[
]
⎢
⎥
βWuy.ном(z)
=
0
1
0
0
0
⎢
0
1
0
⎥×
5
67
8
5
67
8
⎣
⎦
0
0
1
Блок 3
β
-1 0 1
5
67
8
D
⎡
⎤
1
a2
0
⎢
z-a1
(z - a1)(z - aж)
⎥
⎡
⎤
⎢
⎥
[
]
0
0
⎢
⎥
1
b1
b2
⎢
⎥
⎦
×
0
0
⎣ b1 b2
=
,
⎢
⎥
z-aж
z-aж z-aж
⎢
⎥
0
0
⎣
a2
1
⎦
5
67
8
0
B
(z - aж)(z - 1) z - 1
5
67
8
Ω-1(z)
119
⎡
⎤
1
a2
⎡
⎤
0
1
0
0
⎢
z-a1
(z - a1)(z - aж)
⎥
⎢
⎥
⎢
0
1
0
⎥
⎢
⎥
⎢
⎥
1
⎢
⎥
Wv
(z)α
= ⎢
0
1
0
⎥
0
0
×
y.ном
⎢
⎥
5
67
8
⎣
⎦
z-aж
0
0
1
⎢
⎥
Блок 1
⎣
⎦
a2
1
-1 0 1
0
5
67
8
(z - aж)(z - 1) z - 1
D
5
67
8
Ω-1(z)
⎡
⎤
g1
a2g3
⎢
z-a1
(z - a1) (z - aж)
⎥
⎢
⎥
⎢
g
3
⎥
⎢
0
⎥
⎡
⎤
⎡
⎤
⎢
z-aж
⎥
⎢
⎥
g1
0
g2
1
0
⎢
g3
⎥
⎦
⎣0
⎦
⎢
0
⎥
×⎣ 0
g3
g4
1
=
⎢
z-aж
⎥
0
0
0
0
0
⎢
⎥
⎢
a2g3
⎥
5
67
8
5
67
8
⎢
0
⎥
G
α
⎢
(z - aж) (z - 1)
⎥
⎢
⎥
⎣
⎦
-g1
a2g3 (1 - a1)
z-a1
(z - a1) (z - aж) (z - 1)
Интеграционный базис (7) не зависит от выбора интерфейсных матриц
Cвх, Cвых и имеет значение
[
]
b1
b2
Θбаз(z) = βWuy.ном(z)
Qном(z)
Wvy.ном(z)α
=
×
5
67
8
5
67
8
5
67
8
z-aж z-aж
5
67
8
блок 3
блок 2
блок 1
блок 3
⎡
⎤
g1
a2g3
⎢
z-a1
(z - a1) (z - aж)
⎥
⎢
⎥
⎢
g
3
⎥
⎢
0
⎥
⎡
⎤
⎢
z-aж
⎥
-a3
aж - a4
⎢
⎥
0
0
0
⎢
g3
⎥
⎦
⎢
0
⎥
×⎣ b1
b1
=
⎢
z-aж
⎥
⎢
⎥
0
0
0
0
0
⎢
a2g3
⎥
5
67
8
⎢
0
⎥
блок 2
⎢
(z - aж)(z - 1)
⎥
⎢
⎥
⎣
⎦
-g1
a2g3 (1 - a1)
z-a1
(z - a1) (z - aж) (z - 1)
5
67
8
блок 1
[
]
-a
3g1
g3 ((aж - a4)z - aΣ)
=
(z - a1)(z - aж)(z-a1) (z - aж)2
Использование результатов примера из [14] избавляет от необходимости
проверять здесь допустимость конфигурации КО и позволяет сразу перейти
к синтезу решения.
Номинальное значение интерфейсной матрицы Cномвх, допустимое по опре-
делению, с учетом свойств сводного канонизатора, приведенных в разделе 3,
120
используется при вычислении одного из канонизаторов формулы (12):
[
][
]
b1
b2
1
b1
βWuy.ном(z)Cномвх =
=
,
z-aж z-aж
0
z-aж
(
(18)
βWuy.ном(z)Cномвх
)∼ =(βWuy.ном(z)Cномвх)-1 =z-aж .
b1
Здесь в частном случае канонизатор, получаемый обращением скаляра, имеет
единственное значение.
В случае выбора из числа допустимых конфигураций, имеющихся в [14],
варианта интерфейсной матрицы Cвых, представленной как
⎡
⎤
0
0
1
0
0
Cвых3 =⎣ 0
0
0
1
0
⎦,
0
0
0
0
1
вычисление другого канонизатора приводит к результату (возможны другие
значения, но на общее решение это не влияет, см. комментарий в конце раз-
дела 6):
⎡
⎤
g
3
0
⎢
z-aж
⎥
⎢
⎥
⎢
a2g
3
⎥
⎢
0
⎥
Cвых3Wvy.ном(z)α =
⎢
(z - aж) (z - 1)
⎥,
⎢
⎥
⎣
-g1
a2g3 (1 - a1)
⎦
z-a1
(z - a1) (z - aж) (z - 1)
(
(19)
Cвых3Wvy.ном(z)α)∼ =(Cвых3Wvy.ном(z)α)L =
⎡
⎤
1-a
1
z-a1
0
⎢
g1
-g1
⎥
⎢
⎥
=
⎣
⎦.
(z - aж) (z - 1)
0
0
a2g3
Базовое решение, относящееся к данной паре интерфейсных матриц Cномвх,
Cвых3 и обусловленное результатами канонизации (18) и (19), принимает зна-
чение
(
)∼
(
)∼
βWuy.ном(z)Cномвх
Θбаз(z)
Cвых3Wvy.ном(z)α
=
5
67
8
Базовое решение
[
]
ж
z-a
-a3g1
g3 ((aж - a4)z - aΣ)
=
×
b1
(z - a1)(z - aж)(z-a1) (z - aж)2
⎡
⎤
1-a
1
z-a1
0
[
]
⎢
g1
-g1
⎥
(aж - a4)z - aΣ a3
⎢
⎥
×
0
⎣
⎦=
(z - aж) (z - 1)
b1(z - 1)
b1
0
0
a2g3
121
Выражения для вариаций столбцов и строк общего решения (12) определя-
ются формулами
R
βWuy.ном(z)Cномвх
Rθ
= 0, поскольку βWuy.ном(z)Cномвх
R =b1
= 0,
5
67
8
z-aж
Вариация столбцов решения
⎡
⎤
L
g
3
0
⎢
z-aж
⎥
⎢
⎥
[
]
⎢
a2g
3
⎥
L
z-1
⎢
0
⎥
ϑCвых3Wvy.ном(z)α
=ϑ
=ϑ 1
0 .
⎢
(z - aж) (z - 1)
⎥
5
67
8
-a2
⎢
⎥
Вариация строк решения
⎣ -g1
a2g3 (1 - a1)
⎦
z-a1
(z - a1)(z - aж)(z - 1)
Анализ таблиц демонстрирует существование двух семейств решений за-
дачи интеграции КО: единственное решение и множество эквивалентных ре-
шений.
Кратко физический смысл различных решений можно пояснить следую-
щим образом. Размеры и структура матрицы Cвых задают используемые вы-
ходы датчиков (столбцы) и каналы обработки информации в ИВС (строки).
Из анализа таблиц следует, что для существования решения в полной и реду-
цированной постановках необходимо использовать как минимум два канала
обработки, а также:
либо сигналы угла атаки y1,τ и угловой скорости тангажа y2.τ и/или y3.τ ,
либо сигналы угловой скорости тангажа y2.τ и/или y3.τ , угла тангажа y4.τ
и угла наклона траектории y5.τ.
Это согласуется с опытом построения контуров управления движением
самолетов.
При этом в полной постановке (табл. 1) существуют дополнительные ре-
шения при использовании
либо сигналов угла атаки y1.τ с сигналом угла тангажа y4.τ или угла на-
клона траектории y5.τ ,
либо сигнала угловой скорости тангажа y2.τ или y3.τ с сигналом угла на-
клона траектории y5.τ .
Такое положение объясняется возможностями дополнительной функцио-
нальной обработки сигналов датчиков со сдвигом вперед (аналог дифферен-
цирования) в вариантах 3, 4 и со сдвигом назад (аналог интегрирования) в
варианте 5.
Множества эквивалентных решений возникают при возможности простого
комбинирования сигналов измерителей (варианты 2 и 10 табл. 1, варианты 2
и 5 табл. 2) либо комбинирования в сочетании с функциональной обработкой
(варианты 3-5 табл. 1).
Другие из рассмотренных комбинаций датчиков не приводят к достиже-
нию цели.
122
8. Заключение
Для практически важной ситуации, когда конфигурация КО, формали-
зуемая интерфейсными матрицами Cвх и Cвых, изменяется по каким-либо
соображениям и удовлетворены условия допустимости этих матриц [14], по-
лучены формульные выражения для полного и усеченных множеств инте-
грационных матриц (правил обработки сигналов межкомпонентных связей)
{E(z)}θ,ϑ, при которых целевая функция КО принимает предварительно за-
данное значение Φтреб(z), зафиксированное номинальной конфигурацией КО
и весовыми матрицами α, β. При этом варьирование E(z) путем выбора вхо-
дящих в решение матриц θ и ϑ не влияет на значение целевой функции и
позволяет удовлетворять дополнительные требования к КО.
Основной результат базируется на принятой гипотезе об эквивалентности
относительно искомой интеграционной матрицы E(z) синтезируемой системы
“ ‘объект + КО” и специально введенной базисной системы.
Методический пример на представительном множестве возможных кон-
фигураций подтверждает эффективность полученного решения и иллюстри-
рует его разнообразность. В том числе показано, что при невыполнении усло-
вий допустимости конфигурации результат использования соответствующих
формул ошибочен.
ПРИЛОЖЕНИЕ
Обоснование гипотезы. В соответствии с [14] необходимым и доста-
точным условием разрешимости основного уравнения (8) избыточного КО
относительно матрицы E(z) является выполнение двух равенств (10) и (11),
которые по своей структуре аналогичны условиям разрешимости двусторон-
него линейного матричного уравнения для неизвестной матрицы E(z) (тео-
рема 1.6 из [15]) при условии, что это уравнение имеет вид (9).
Строгое совпадение условий разрешимости основного уравнения интегра-
ции (8) для синтезируемой системы и уравнения (9) для базисной системы
явилось поводом для отождествления и их решений.
Важным обстоятельством в базисной системе (6) в контексте решаемой за-
дачи является то, что блок 2 с линейно входящей передаточной матрицей Q(z)
справа и слева взаимодействует с блоками, представляющими выходы и вхо-
ды компонентов КО, функционирующих в замкнутой системе “объект + КО”
при номинальной конфигурации под действием тестовых входов. Это сулит
полноту учета влияния на конфигурационную матрицу в блоке 2 внутренних
связей замкнутой системы, моделируемых блоками 1 и 3 в тестовых условиях
и номинальной конфигурации.
Сказанное соответствует выполнению равенства (9) и заключено в сфор-
мулированной гипотезе.
Доказательство теоремы 1. Опираясь на гипотезу, вместо решения
основного уравнения интеграции системы (8), которое должно было бы дать
решение сформулированной задачи, будем решать уравнение (9). В соответ-
ствии с теоремой 1.7 из [15] все множество решений линейного двустороннего
123
уравнения (9) при выполнении условий его разрешимости (10) и (11) опреде-
ляется формулой (12). Теорема 1 доказана.
Доказательство теоремы 2. Доказательство базируется на редук-
ции (упрощении) решения поставленной задачи, заключающейся в том, что
вместо целевой функции (4) с присущими ей структурными особенностя-
ми [14] рассматривается только ее знаменатель. Очевидно, что при справед-
ливости равенства
BCвхE(z)CвыхD = BQном(z)D
этот знаменатель остается неизменным при варьировании E(z) и, как след-
ствие, значение целевой функции заведомо сохраняется при любых фиксиро-
ванных сомножителях (числителях) βD слева и Gα справа.
При удовлетворении условий (14) записанное линейное двустороннее урав-
нение разрешимо (теорема 1.6 из [15]) относительно матрицы E(z), а все мно-
жество решений (теорема 1.7 из [15]) определяется формулой (15). Теорема 2
доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Ефанов Д.Е. Аналитическая реконфигурация системы управления полетом воз-
душного судна с сохранением заданных характеристик устойчивости // Маши-
ностроение: сетевой электрон. научн. журн. 2017. Т. 5. № 1. С. 23-34.
2.
Павлов А.Н. Постановка и возможные пути решения задач структурно-функ-
циональной реконфигурации сложных объектов // XII Всеросс. сов. по пробле-
мам управления ВСПУ-2014. М.: Изд-во ИПУ им. В.А. Трапезникова РАН, 2014.
С. 7648-7655.
3.
Федухин А.В., Муха А.А. Имитационное моделирование отказоустойчивой ре-
зервированной двухканальной системы в интегрированной инструментальной
среде MatLAB Simulink // Математические машины и системы. 2011. Т. 1. № 2.
С. 178-181.
4.
Лысенко А.В., Кремез Г.В. Многопроцессорная перестраиваемая бортовая вы-
числительная система с блоком управления реконфигурацией // Современ-
education.ru/ru/article/view?id=6787
5.
Мануйлов Ю.С., Павлов А.Н., Павлов Д.А. Методика прогнозирования струк-
турной устойчивости функционирования автоматизированных систем управле-
ния космическими аппаратами // Тр. Военно-косм. акад. им. А.Ф. Можайского.
2013. № 640. С. 123-128.
6.
Каляев И.А., Мельник Э.В. Реконфигурируемые информационно-управляющие
системы // Матер. пленар. засед. 5-й Российской мультиконф. по проблемам
управления. СПб.: Изд. ЦНИИ «Электроприбор», 2012. С. 36-37.
7.
Sollock P. Reconfigurable Redundancy - The Novel Concept Behind the World’s
First Two-Fault-Tolerant Integrated Avionics System // Avionics, Navigation and
584731main_Wings-ch4e-pgs242-255.pdf
8.
Zhang Y., Jiang J. Bibliographical Review on Reconfigurable Fault-tolerant Control
Systems // Ann. Rev. Control. 2008. No. 32. P. 229-252.
124
9.
Агеев А.М., Бронников А.М., Буков В.Н., Гамаюнов И.Ф. Супервизорный ме-
тод управления технических систем с избыточностью // Изв. РАН. Теория и
системы управления. 2017. № 3. С. 72-82.
Ageev A.M., Bronnikov A.M., Bukov V.N., Gamayunov I.F. Supervisory Control
Method for Redundant Technical Systems // J. Comput. Syst. Sci. Int. 2017. V. 56.
No. 3. P. 410-419.
10.
Буков В.Н., Бронников А.М., Агеев А.М., Гамаюнов И.Ф. Аналитический под-
ход к формированию конфигураций технических систем // АиТ. 2017. № 9.
С. 67-83.
Bukov V.N., Bronnikov A.M., Ageev A.M., Gamayunov I.F. An Analytic Approach
to Constructing Configurations of Technical Systems // Autom. Remote Control.
2017. V. 78. No. 9. P. 1600-1613.
11.
Буков В.Н., Агеев А.М., Гамаюнов И.Ф., Шурман В.А. Архитектурный облик
комплексов бортового оборудования воздушных судов с позиции реализации
функции необслуживаемости // Мехатроника, автоматика и робототехника: Ма-
тер. междунар. науч.-практ. конф. 2018. № 2. С. 206-210.
12.
Гамаюнов И.Ф. Генерирование альтернативных решений в задаче управления
избыточностью технических комплексов // АиТ. 2018. № 4. С. 92-104.
Gamayunov I.F. Generation of Alternative Solutions in the Redundancy Manage-
ment Problem for Hardware Complexes // Autom. Remote Control. 2018. V. 79.
No. 4. P. 655-664.
13.
Агеев А.М. Конфигурирование избыточных комплексов бортового оборудова-
ния на основе аппарата передаточных матриц // Изв. РАН. Теория и системы
управления. 2018. № 4. C. 175-192.
Ageev A.M. Configuring of Excessive Onboard Equipment Sets // J. Comput. Syst.
Sci. Int. 2018. V. 57. No. 4. P. 640-654.
14.
Буков В.Н., Бронников А.М. Тестирование конфигураций избыточных интегри-
рованных комплексов оборудования // АиТ. 2019. № 2. C. 81-100.
Bukov V.N., Bronnikov A.M. Testing the Configurations of Redundant Integrated
Equipment Complexes // Autom. Remote Control. 2019. V. 80. No. 2. P. 262-277.
15.
Буков В.Н. Вложение систем. Аналитический подход к анализу и синтезу мат-
ричных систем. Калуга: Изд-во науч. лит-ры. Н.Ф. Бочкаревой, 2006.
Статья представлена к публикации членом редколлегии О.А. Степановым.
Поступила в редакцию 10.09.2017
После доработки 15.10.2018
Принята к публикации 08.11.2018
125