Автоматика и телемеханика, № 5, 2019
© 2019 г. А.В. ПЕСТЕРЕВ, д-р физ.-мат. наук (a.pesterev@javad.com)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ОЦЕНКА ОБЛАСТИ ПРИТЯЖЕНИЯ ЗАМКНУТОЙ
ЛИНЕАРИЗУЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ
АФФИННОЙ СИСТЕМЫ С ОГРАНИЧЕННЫМ
ВЕКТОРНЫМ УПРАВЛЕНИЕМ1
Рассматриваются представимые в каноническом (нормальном) виде
нелинейные аффинные системы с ограниченным векторным управлени-
ем, замкнутые обратными связями специального вида, линеаризующими
систему в окрестности начала координат. Ставится задача построения
оценки области притяжения положения равновесия замкнутой нелиней-
ной системы. Предложен метод нахождения оценки области притяжения,
основанный на результатах теории абсолютной устойчивости. Оценка об-
ласти притяжения ищется в виде декартового произведения положитель-
ных инвариантных множеств составляющих систему подсистем. В слу-
чае эллипсоидальных инвариантных множеств построение оценки обла-
сти притяжения сведено к решению систем линейных матричных нера-
венств. Изложение иллюстрируется численными примерами.
Ключевые слова: нелинейные аффинные системы с ограниченным вектор-
ным управлением, линеаризация с помощью обратной связи, область при-
тяжения, теория абсолютной устойчивости, линейные матричные нера-
венства.
DOI: 10.1134/S0005231019050040
1. Введение
Ограниченность ресурсов управления в реальных системах автоматиче-
ского регулирования приводит к тому, что орган управления выходит на
насыщение, когда сигнал обратной связи превышает некоторое предельное
значение. Функционирование системы, спроектированной без учета этого об-
стоятельства, в режиме насыщения может приводить к существенному сни-
жению эффективности регулирования и часто к потере устойчивости. Таким
образом, требуется, с одной стороны, проектировать контроллер с учетом воз-
можного выхода органа управления на насыщение и, с другой стороны, иметь
оценку области притяжения рассматриваемой нелинейной системы управле-
ния с насыщением для гарантированного вывода ее на желаемый режим ра-
боты.
Преодолению негативных эффектов, вызванных насыщением в органах
управления, посвящены многочисленные публикации (см., например, [1-6]
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 18-08-00531а) и Президиума РАН (Программа № 29 “Актуальные
проблемы робототехнических систем”).
66
и приведенные там ссылки). В подавляющем большинстве публикаций рас-
сматриваются линейные системы, для которых ставится либо задача синтеза
контроллера, учитывающего возможность насыщения в органах управления,
либо задача разработки отдельного компонента контроллера, который акти-
визируется только при выходе на насыщение, в дополнение к линейному кон-
троллеру, спроектированному без учета ограничений. Учет ограниченности
управления в нелинейных системах представляет собой значительно более
сложную задачу, и число публикаций на эту тему не так велико. В боль-
шей части их делается попытка адаптировать методы, разработанные для
линейных систем, на нелинейный случай. В ряде публикаций для разработки
специальных контроллеров используются методы адаптивного управления и
нейронных сетей, а также методы, основанные на линеаризации с помощью
обратной связи (например, [7, 8]).
В статье рассматриваются представимые в нормальном (каноническом)
виде [9, 10] n-мерные аффинные системы управления с m ограниченными по
величине входами. Для стабилизации систем используются линеаризующие
обратные связи [10]. Ограничения на управления реализуются применени-
ем к соответствующим сигналам обратной связи функций насыщения (сату-
раторов). Из-за ограниченности ресурса управления полученная замкнутая
система линейна только в некоторой окрестности положения равновесия и
нелинейна во всей области определения. Для замкнутой нелинейной систе-
мы ставится задача нахождения оценки области притяжения (ОП) нулевого
решения. Задача разработки контроллера, учитывающего ограничения, не
ставится, так что коэффициенты обратной системы предполагаются заранее
известными.
Предлагаемый в настоящей статье подход к построению оценок ОП осно-
ван на результатах теории абсолютной устойчивости и является обобщением
на случай векторного управления разработанного в [11] метода нахождения
эллипсоидальных оценок ОП аффинных систем с ограниченным скалярным
управлением. В свою очередь, указанный метод опирается на результаты ра-
бот [5, 12], в которых теория абсолютной устойчивости применялась для на-
хождения оценок ОП для некоторых аффинных систем малой размерности
(см. также обсуждение в [11]). Например, в [12] строилась эллипсоидальная
оценка ОП для нелинейной системы второго порядка, возникающей в задаче
стабилизации колесного робота вдоль прямого или кругового целевого пу-
ти. Модификации предложенного в [12] подхода применительно к различ-
ным моделям колесных роботов, описываемых аффинными системами 2-го и
3-го порядков, и произвольным допустимым целевым путям рассматривались
в [13-15].
2. Постановка задачи
Рассмотрим многомерную аффинную систему управления с векторным
входом, представленную в виде совокупности m связанных подсистем вида
(1)
xi1 = xi2,... , xir
=xir
,
xir
= fi(x) + gi(x)ui
, i = 1,...,m.
i-1
i
i
67
Здесь x — n-мерный вектор состояний, x ≡ (x1, . . . , xm) ∈ Dx ⊆ Rn, xi ∈ Rri ,
fi(x) и gi(x) = 0 — непрерывные функции,
(2)
r1 + ··· + rm
= n,
ui — непрерывные управления, удовлетворяющие двусторонним ограниче-
ниям
(3)
-ui ≤ui ≤ ui.
Система (1) называется каноническим представлением [9] или нормальной
формой [10] аффинной системы управления с m-мерными входом и выходом2.
К виду (1) приводятся аффинные системы управления с векторной отно-
сительной степенью выхода {r1, . . . , rm}, удовлетворяющей условию (2) [10].
Легко видеть, что если ресурс управления не ограничен, то система линеа-
ризуется с помощью обратной связи
(4)
ui(x) = -(σi(x) + fi(x))/gi
(x),
где σi(x) ≡ σi(xi) = cTixi, cTi = [ci1, . . . , ciri ], cij > 0. При этом замкнутая
система распадается на m независимых подсистем
xi1 = xi2,... , xiri-1 = xr ,i
xiri = -σi(xi), или в матричном виде xi = Aixi, i = 1,... ,m, где
⎡
⎤
0
1
0
···
0
⎢
0
0
1
···
0
⎥
⎢
⎥
(5)
Ai =⎢⎢
⎥.
⎥
⎣
⎦
0
0
0
···
1
−ci1
-ci2
-ci3
···
-ciri
Решение x = 0 системы (1) с обратной связью (4) глобально асимптотически
устойчиво тогда и только тогда, когда матрицы Ai всех подсистем гурвицевы.
Всюду далее будем полагать, что это условие выполнено.
Ограниченность ресурсов управления делает невозможной линеаризацию
системы (1) с помощью обратной связи (4) во всей области определения си-
стемы. Определим в этом случае управления формулой
(6)
ui(x) = -satui[(σi(x) + fi(x))/gi
(x)],
получающейся применением функции насыщения к правой части форму-
лы (4), определяющей линеаризующую обратную связь.
Замыкание системы (1) обратной связью (6) дает систему m нелинейных
подсистем вида
(7)
xi1 = xi2,... , xir
= xri, xri = -Φi(σi
,x), i = 1,... ,m,
i-1
2 В общем случае нормальной формы правая часть i-й подсистемы может зависеть от
всех управлений [10]. Вводя новые управления, всегда можно записать нормальную фор-
му системы в виде (1). Если управления не ограничены, то оба представления, очевидно,
эквивалентны. Однако в случае ограниченного ресурса управления новые управления удо-
влетворяют более сложным ограничениям, не рассматриваемым в настоящей статье, так
что исследуемая система (1) является частным случаем общей нормальной формы.
68
связанных друг с другом через правые части Φi(σi, x), которые при выхо-
де управлений на ограничения в общем случае зависят от всех компонент
вектора x:
(8)
Φi(σi,x) = -fi(x) + |gi(x)|ui sign(σi(xi) + fi
(x)).
В некоторой же окрестности начала координат, где управление не выходит
на насыщение, Φi(σ, x) = σi(xi) и подсистемы линейны и независимы. Вклю-
чение σi в число аргументов функций Φi подчеркивает, что правая часть
системы зависит не только от текущих значений переменных состояния, но и
от значения линейной функции σi(xi).
Ставится задача нахождения оценки области притяжения нулевого реше-
ния системы (7). Для того чтобы x = 0 было устойчивым положением равно-
весия системы (7), необходимо выполнение условий
fi(0)
(9)
ui
, i = 1,...,m.
<
gi(0)
Заметим, что если x = 0 - положение равновесия разомкнутой системы, т.е.
fi(0) = 0, i = 1,... ,m, то условия (9) заведомо выполняются.
Всюду далее будем полагать, что область определения системы (1) в общем
случае не совпадает со всем пространством, Dx ⊆ Rn, и что ее правая часть
удовлетворяет условиям (9).
3. Система сравнения
Наряду с системой (7) рассмотрим m линейных нестационарных систем
(10)
xi1 = xi2,... , xir
=xir
,
xir
= -βi(t)σi(xi
), i = 1, . . . , m,
i-1
i
i
где
(11)
0<βi0 <βi
(t) ≤ 1,
и будем называть систему (10) системой сравнения для нелинейной систе-
мы (7).
Пусть подсистемы системы сравнения абсолютно устойчивы в секторах
(βi0, 1], i = 1, . . . , m, соответственно. Напомним, что линейная нестационар-
ная система называется абсолютно устойчивой в секторе (угле) (βi0, 1], если
ее нулевое решение асимптотически устойчиво при любых измеримых функ-
циях βi(t), удовлетворяющих неравенствам (11) [16, 17].
Если бы правая часть i-й подсистемы в (7) при любых x ∈ Rn удовлетво-
ряла “секторному” условию
(12)
0 < βi0σ2i < Φi(σi,x)σi ≤ σ2i ,
то xi = 0 было бы асимптотически устойчивым решением этой подсистемы
в целом (из абсолютной устойчивости линейной нестационарной системы в
69
угле (βi0, 1] следует абсолютная устойчивость соответствующей нелинейной
подсистемы в (7) в угле (βi0, 1] [17]). Соответственно выполнение условий (12)
при всех i = 1, . . . , m означало бы абсолютную устойчивость состоящей из
m подсистем n-мерной нелинейной системы (7).
Для одномерных подсистем (ri = 1) в (7) нулевое решение соответствую-
щей (скалярной) системы сравнения асимптотически устойчиво при любых
βi(t) > 0, т.е. βi0 = 0, и секторное условие (12) принимает вид Φi(xi,x)xi > 0.
Условия (12), однако, в общем случае не выполняется во всем коорди-
натном пространстве Rn (не говоря уже о том, что система (1) определена не
во всем координатном пространстве). Однако и в этом случае исследование
устойчивости нулевого решения нелинейной системы (7) можно свести к ис-
следованию абсолютной устойчивости линейных нестационарных систем (10),
если потребовать выполнение секторных условий (12) не во всем координат-
ном пространстве, а только в положительной инвариантной области (далее
просто инвариантной области) n-мерной системы (7) [11], т.е. в таком мно-
жестве в Rn, которое вместе с любой принадлежащей ей точкой содержит
всю полутраекторию системы (7), начинающуюся в этой точке [4]. Возникает
вопрос: “Как найти инвариантную область системы (7)?”
4. Инвариантная область нелинейной системы
В [11] доказано, что в случае скалярного управления (m = 1) в качестве
инвариантной области исходной нелинейной системы можно взять инвари-
антную область абсолютно устойчивой системы сравнения, если правая часть
нелинейного уравнения удовлетворяет секторному условию в этой области.
Покажем, что указанный результат может быть обобщен на случай много-
мерного управления. А именно будем искать инвариантную область нелиней-
ной системы в виде декартова произведения инвариантных областей систем
сравнения Υ = Υ1 × · · · × Υm, где Υi - (положительная) инвариантная об-
ласть i-й системы сравнения (10), и докажем (теорема 1), что для того чтобы
Υ было инвариантной областью, достаточно чтобы правые части системы
удовлетворяли секторным условиям в Υ. Прежде чем доказать это, найдем
необходимые условия выполнения секторных условий в заданной области Υ.
Областью насыщения Ni ⊂ Υ i-й нелинейной подсистемы (7) будем назы-
вать множество точек x ∈ Υ, в которых управление (6) принимает предель-
ные значения ±ui. Выполнение i-го секторного условия достаточно проверять
только в области Ni, так как в области линейности подсистемы секторное
условие тривиально выполняется: Φi(σi, x)σi = σ2i.
Лемма 1. Пусть в области Υ ⊆ Dx выполняется i-е секторные усло-
вие (12). Тогда: а) множество Ni не имеет пересечений с гиперплоскостью
σi(x) = 0 и б) знак i-го насыщенного управления в области Υ определяется
только знаками функций gi(x) и σi(x)
(13)
ui(x) = -ui sign(gi(x)σi(x)) ∀x ∈ Ni.
Доказательство леммы 1. Докажем утверждение а). Предположим
противное: найдется точка x∗ ∈ Υ, в которой i-е управление достигает насы-
70
щения, и при этом σi(x∗) = 0. Пусть для определенности ui(x∗) = +ui. В си-
лу (6) при этом должно выполняться неравенство σi(x∗) + fi(x∗) < -gi(x∗)ui.
Отсюда с учетом определения функций Φi имеем
Φi(σi(x∗),x∗) = -fi(x∗) - gi(x∗)ui > σi(x∗) = 0.
В силу непрерывности функции Φi(σi, x) по x найдется окрестность точ-
ки x∗, в которой Φi(σi(x), x) > 0. С другой стороны, линейная функция σi(x)
в окрестности x∗ может принимать как положительные, так и отрицательные
значения. Во втором случае секторное условие (12), очевидно, не выполня-
ется. Аналогично доказывается, что секторное условие не выполняется, если
ui(x∗) = -ui.
б) Из сравнения (6) и (13) видно, что условие (13) эквивалентно условию
(14)
sign(σi(x) + fi(x)) = sign(σi(x)) ∀x ∈ Ni.
Докажем это утверждение. Так как gi(x) = 0 в Dx, gi(x) — знакоопределе-
ная функция. Пусть для определенности gi(x) > 0. Предположим, что най-
дется точка x∗ ∈ Ni такая, что σi(x∗) > 0 и σi(x∗) + fi(x∗) < 0. Тогда в си-
лу (8) Φi(σi, x∗) = -fi(x∗) - gi(x∗)ui. В силу (6) ui(x∗) = ui и fi(x∗) + σi(x∗) <
< -gi(x∗)ui, или -gi(x∗)ui - fi(x∗) > σi > 0, т.е. Φi(σi,x∗)σi > σ2i > 0, что
противоречит предположению о том, в Ω выполнены секторные условия (12).
Аналогично доказывается, что не найдется точки, в которой σi(x) < 0 и
σi(x) + fi(x) > 0. Случай отрицательного gi(x) рассматривается аналогично.
Лемма 1 доказана.
Утверждения леммы 1 означают, что при выполнении i-го секторного
условия в Υ i-я подсистема (7) линейна на пересечении Υ и гиперплоско-
сти σi(x) = 0, а область Ni состоит из двух несвязных компонент, лежащих
по разные стороны от гиперплоскости, знак управления в которых (с уче-
том знакопостоянства функции gi(x)) определяется только знаком линейной
функции σi(x). Формула (8) для правых частей системы (7) в области, удо-
влетворяющей секторному условию, принимает более простой вид
(15)
Φi(σi,x) = -fi(x) + |gi(x)|ui sign(σi
).
Теорема 1. Пусть система сравнения (10) абсолютно устойчива при
любых измеримых функциях βi(t), удовлетворяющих неравенствам (11).
Пусть Υi ⊆Rri - инвариантные области подсистем такие, что Υ = Υ1 ×· · ·
··· × Υm ⊆ Dx. Если правые части нелинейной системы (7) удовлетворяют
секторным условиям (12) в области Υ, то Υ - инвариантная область си-
стемы (7).
Доказательство теоремы 1. Предположим, что утверждение тео-
ремы неверно: область Υ удовлетворяет условиям теоремы 1 и не является
инвариантной для системы (7). Тогда найдется точка x0 ∈ Υ такая, что реше-
ние x(t) системы (7), соответствующее начальному условию x(t0) = x0, выхо-
дит за пределы области Υ, т.е. найдется t∗ > t0 такое, что x∗ ≡ x(t∗) ∈ Υ.
Последнее означает, что для некоторого l l-я компонента вектора x∗ не
принадлежит l-му инвариантному множеству, xl∗ ∈ Υl. Рассмотрим участок
71
траектории между точками x0 и x∗. Обозначим через σl(t) иΦl(t) опре-
деленные на [t0, t∗] функции, получающиеся подстановкой xl(t) и x(t) вме-
сто xl и x в σl(xl) и в правую часть l-й подсистемы (7) соответственно:
σl(t) = σl(xl(t)),
Φl(t) = Φ(σ(t),x(t)). Определим функцию
βl(t) на отрезке
[t0, t∗] как
βl(t) =Φl(t)/σl(t). Так как в силу леммы 1 на участках насыще-
ния σl(t) = 0, а в области линейности, очевидно
βl(t) = 1, функцияβl(t) удо-
влетворяет условию существования непрерывного решения системы (10) и
xl(t) является решением этой системы при βl(t)
βl(t). Так как функция Φl
по условию утверждения удовлетворяет секторному ограничению (12), то
функцияΦl(t) удовлетворяет неравенствам β0σ2l(t) ≤Φl(t)σl(t) ≤ σ2l(t), от-
куда следует, что функцияβl(t) удовлетворяет условию (11). Так как Υl —
инвариантная область системы (10) при любых βl(t), удовлетворяющих нера-
венствам (11) и xl0 ∈ Υl, то траектория xl(t) должна целиком лежать в Υl
и xl∗ ∈ Υl, что противоречит полученному выше условию xl∗ ∈ Υl. Теорема 1
доказана.
Установим теперь достаточные условия выполнения секторных неравенств
в произвольном множестве Υ ∈ Rn. Введем обозначения Σi(σ0) = {xi ∈ Rri :
|σi(xi)| < σ0} и
Σi(σ0) = {x ∈ Rn : |σi(x)| < σ0} (расширение Σi(σ0) на все
пространство Rn).
Лемма 2. Пусть а) ∀x ∈ Υ
(16)
Ui(x) ≥ Ui0
> 0,
где
(17)
Ui(x) = |gi(x)|ui - |fi
(x)|,
и б) Υ⊆Σi(Ui0/βi0). Тогда в области Υ выполнено i-е секторное условие (12).
Доказательство леммы 2. Легко проверить, что из определений на-
сыщенного управления (6) и функций Φi(σi, x) следует, что если gi(x) > 0 и
ui = -ui или gi(x) < 0 и ui = ui, то σi + fi(x) > |gi(x)|ui и Φi(σi,x) = -fi(x)+
+|gi(x)|ui, т.е. Φi(σi, x) < σi. С другой стороны, в силу условий леммы 2 име-
ем Φi(σi, x) = -fi(x) + |gi(x)|ui ≥ |gi(x)|ui - |fi(x)| ≥ Ui0 > 0. Откуда следу-
ет, что σi > 0 и Φiσi ≥ Ui0σi. Аналогично при gi(x) > 0 и ui = ui или при
gi(x) < 0 и ui = -ui, σi + fi(x) < -|gi(x)|ui и Φi(σi,x) = -fi(x) - |gi(x)|ui,
т.е. Φi(σi, x) > σi. В силу условия леммы 2 Φi(σi, x) = -fi(x) - |gi(x)|ui ≤
≤ -(|gi(x)|ui - |fi(x)|) ≤ -Ui0 < 0. Отсюда σi < 0 и Φiσi ≥ Ui0|σi|. Из полу-
ченных неравенств следует выполнение правого неравенства (12) и строгая
положительность Φiσi в Ni (функции Φi и σi имеют одинаковые знаки в Υ).
Далее, для любых x ∈ Υ, для которых i-е управление достигает насыще-
ния, справедлива цепочка неравенств
Ui0σ2i
Ui0
(18)
Φiσi ≥ Ui0|σi| ≥
>
σ2i,
|σi|
σi0
где σi0 - максимум функции |σi(xi)| в Υ. В силу условия б) леммы 2 и по
определению множестваΣi(σ0), σi0 ≤ Ui0/βi0 и, таким образом, Φiσi > βi0σ2i.
Лемма 2 доказана.
72
Из теоремы 1 и леммы 2 очевидным образом следуют достаточные условия
инвариантности декартового произведения инвариантных множеств систем
сравнения.
Теорема 2. Пусть в области Υ = Υ1 × ··· × Υm ⊆ Dx, где Υi - инва-
риантная область i-й системы сравнения (10), для любого i: a) выполнены
условия (16) и б) Υi ⊂ Σi(Ui0/βi0). Тогда Υ - инвариантная область нели-
нейной системы (7).
Таким образом, построение оценки области притяжения нелинейной систе-
мы (7) сводится, по существу, к: a) определению секторов (βi0, 1], i = 1, . . . , m,
в которых абсолютно устойчивы подсистемы системы сравнения (10); б) на-
хождению семейств инвариантных множеств подсистем системы сравнения;
в) выбору (возможно с применением некоторого критерия оптимальности) из
этих семейств таких множеств Υi, для которых выполняются условия (16) и
Υi ⊂ Σi(Ui0/βi0).
Первая задача является стандартной задачей теории абсолютной устойчи-
вости и в статье не рассматривается. Для решения второй задачи достаточ-
но найти функции Ляпунова подсистем системы сравнения (10), (11). Реше-
ние третьей задачи, как будет видно из дальнейшего, может быть сведено
к вписыванию инвариантных множеств в некоторые области в Rri . В на-
стоящей статье ограничимся квадратичными функциями Ляпунова Li(xi) =
= (xi)TPixi, где Pi - положительно определенная матрица порядка ri, т.е.
будем искать оценку ОП нелинейной системы (7) в виде декартова произве-
дения
(19)
Ω = Ω1(P1) × ··· × Ωm(Pm)
инвариантных эллипсоидов [18, 19] подсистем системы сравнения (10), (11)
{
}
(20)
Ωi(Pi) =
xi : (xi)TPixi ≤ 1
5. Построение оценок областей притяжения в виде
декартова произведения инвариантных эллипсоидов систем сравнения
5.1. Инвариантные эллипсоиды систем сравнения
Перепишем i-е уравнение в (10) при ri > 1 в эквивалентном матричном
виде
(21)
xi = Aβ
(t)xi,
i
где
⎡
⎤
0
1
0
···
0
⎢
0
0
1
···
0
⎥
⎢
⎥
(22)
Aβi(t) =⎢⎢
⎥.
⎥
⎣
⎦
0
0
0
···
1
−βi(t)ci1
-βi(t)ci2
-βi(t)ci3
···
-βi(t)ciri
73
Обозначим через Aβi0 постоянную матрицу, получающуюся из (22) подстанов-
кой βi(t) ≡ βi0. При βi(t) ≡ 1 имеем матрицу Ai, определенную формулой (5).
Известно [20], что для того чтобы система (21) была абсолютно устойчи-
ва в секторе [βi0, 1], достаточно, чтобы существовала общая квадратичная
функция Ляпунова у линейных систем xi = Aixi и xi = Aβi0 xi.
В свою очередь, чтобы у этих систем существовала общая квадратичная
функция Ляпунова Li = (xi)TPixi, необходимо и достаточно [18, 20], чтобы
имела решение система линейных матричных неравенств (л.м.н.)
(23)
PiAi + ATiPi < 0, PiAβ
+ATβ
Pi
< 0.
i0
i0
Следовательно, чтобы линейная нестационарная система (21) была абсолют-
но устойчива в секторе [βi0, 1], достаточно, чтобы существовала положитель-
но определенная матрица Pi, удовлетворяющая неравенствам (23). Эллипсо-
ид (20), матрица которого удовлетворяет л.м.н. (23), будем называть инва-
риантным эллипсоидом i-й подсистемы системы сравнения или просто ин-
вариантным эллипсоидом. Искомые матрицы Pi находятся независимо для
каждой из подсистем системы сравнения.
При ri = 1 i-я (одномерная) подсистема системы сравнения абсолютно
устойчива при любых положительных βi(t) > 0 и ее инвариантным множе-
ством будет любой содержащий нулевую точку отрезок оси xi, при этом ин-
вариантный эллипсоид вырождается в симметричный относительно нулевой
точки отрезок (Pi > 0 - скаляр).
В соответствии с теоремой 1 декартово произведение эллипсоидов (19),
матрицы которых являются решениями л.м.н. (23), будет инвариантным мно-
жеством замкнутой системы (7), если в области Ω выполняются секторные
неравенства (12).
5.2. Обеспечение выполнения секторных условий
Согласно теореме 2 для выполнения секторных условий (12) в Ω доста-
точно, чтобы ∀i выполнялись условия а) Ui(x) ≥ Ui0 > 0 ∀x ∈ Ω и б) Ωi ⊂
⊂ Σi(Ui0/βi0).
Обеспечить выполнение первого условия можно следующим образом. Бу-
дем искать эллипсоиды Ωi в некоторых, более простых, областях Πi ⊆ Rri ,
таких что Π ≡ Π1 × · · · × Πm ⊆ Dx и при любых x ∈ Π выполняются усло-
вия Ui(x) > 0, i = 1, . . . , m. Условия (16) в этом случае будут естественным
образом выполнены и на декартовом произведении эллипсоидов Ωi, если в
качестве Ui0 взять нижнюю грань функции Ui(x) на множестве Π. Такие об-
ласти заведомо существуют в силу условий (9) и непрерывности функций
fi(x) и gi(x). При этом возникает задача вписывания эллипсоида в заданную
область Πi, которая решается наиболее просто, когда эта область выпукла, а
ее граница образована поверхностями первого и/или второго порядков. При-
надлежность эллипсоида Ωi(Pi) такой области может быть записана в виде
системы л.м.н. [11]
(24)
lij(Pi) ≤ 0, j = 1,... ,si,
74
где lij (Pi) - линейная форма от матрицы Pi. Область Πi, условия принад-
лежности к которой эллипсоида Ωi(Pi) могут быть записаны в виде системы
л.м.н. (24), будем называть областью с простой границей (всюду далее обо-
значение Πi используется только для областей с простой границей). Обла-
сти Πi могут быть выбраны, вообще говоря, не единственным образом. Кон-
кретный вид области Πi выбирается с учетом специфики рассматриваемой
задачи и зависит от вида функций в правой части системы (1).
Чтобы на построенном множестве Ω выполнялись секторные ограничения,
остается ограничить диапазоны изменения функций σi, что достигается впи-
сыванием i-го эллипсоида в слой |σi| ≤ σ0, σ0 = Ui0/βi0. Покажем, что для
этого достаточно, чтобы матрица Pi удовлетворяла одному дополнительному
л.м.н.
Лемма 3. Эллипсоид Ωi ⊆ Rri целиком лежит в области Σi(σ0), σ0 > 0,
тогда и только тогда, когда матрица Pi эллипсоида удовлетворяет л.м.н.
cicTi
(25)
Pi ≥
σ2
0
Доказательство леммы 3. Пусть выполнено неравенство (25). Умно-
жая обе части неравенства слева на cTiP-1i и справа на P-1ici, получаем
(cTiP-1ici)(cTiP-1ici)
cTiP-1ici ≥
,
σ2
0
√
откуда cTiP-1ici ≤ σ20. С учетом формулы maxxi∈Ω
σi(xi) = cTiP-1ici [12], из
i
последнего неравенства следует неравенство σ2i(xi) ≤ σ20 ∀xi ∈ Ωi, т.е. Ωi ⊂
⊂ Σi(σ0).
Обратно. Предположим, что Ωi ⊂ Σi(σ0) и при этом условие (25) не выпол-
няется. Тогда найдется вектор y такой, что
yTccTy
σ2(y)
yTPiy <
=
σ20
σ2
0
Выберем длину y так, чтобы конец вектора y принадлежал поверхности эл-
липсоида, т.е. yTPiy = 1. Тогда из предыдущего неравенства следует, что
σ2(y) > σ20, а это противоречит предположению о том, что Ωi ⊂ Σi(σ0). Лем-
ма 3 доказана.
Из леммы 3 следует, что условие Ωi ⊂ Σi(Ui0/βi0) выполняется тогда и
только тогда, когда
β2i0
(26)
Pi ≥ cicT
i U2
i0
5.3. Алгоритм построения оценки области притяжения
Из изложенного следует, что задача построения оценки области притяже-
ния, по существу, решается в два этапа. На первом этапе строится принадле-
жащая области определения системы подобласть Π⊆Dx⊆Rn вида Π = Π1×· · ·
75
···×Πm, где Πi ⊆Rri - области с простой границей, в которых выполняются
условия (16). Если Dx = Rn и ∀i Ui0 = infx∈Dx Ui(x) > 0, то можно положить
Πi = Rri и Π = Rn. Как только указанные области Πi построены, задача рас-
падается на m независимых задач нахождения вписанных в области Πi эл-
липсоидальных оценок областей притяжения составляющих систему (7) под-
систем со скалярным управлением, т.е. к задаче, рассмотренной в [11].
Напомним, как находится оценка области притяжения системы со ска-
лярным управлением, когда известна аппроксимация области определения
системы областью с простой границей (в данном случае это — области Πi,
i = 1,...,m). Выбирается некоторое значение βi0 ∈ (β∗i0,1], где (β∗i0,1] — наи-
больший сектор, в котором система (10), во-первых, абсолютно устойчива и,
во-вторых, имеет квадратичную функцию Ляпунова, производная которой в
силу системы отрицательна при любых βi(t), принадлежащих сектору. Для
малых размерностей ri и/или при специальном выборе коэффициентов обрат-
ной связи величина β∗i0 может быть найдена аналитически. Так, например,
для ri = 1 система сравнения, очевидно, абсолютно устойчива при любых по-
ложительных функциях βi(t), т.е. β∗i0 = 0. При ri > 1 если матрица Ai имеет
одно кратное собственное значение λ < 0, то величина β∗i0 не зависит от λ [21]
и, в частности, для ri = 2 β∗i0 = 1/9 [22]. Численное нахождение оценки гра-
ницы сектора устойчивости в общем случае произвольного распределения
собственных значений гурвицевой матрицы Ai не представляет трудностей.
Для этого достаточно решить систему (23) для нескольких значений βi0 и
выбрать в качестве оценки наименьшего значения β∗i0 минимальное из этих
значений, при котором система имела решения [11]. Далее, решается система
л.м.н. (23), (24), (26) и строится эллипсоид Ωi(Pi).
Следует отметить, что для одномерных подсистем (ri = 1) необходимость
во втором этапе отпадает. Действительно, в этом случае соответствующая си-
стема сравнения абсолютно устойчива при любых положительных βi(t) и ее
(положительным) инвариантным множеством является любой содержащий
нулевую точку отрезок оси xi. С другой стороны, областью с простой грани-
цей Πi в одномерном случае может быть только отрезок (в общем случае -
неограниченный), на котором выполняется условие (16). Так как условие (16)
выполняется в любой точке Πi, то в качестве Ωi можно взять любой принад-
лежащий Πi отрезок оси xi и, в частности, весь отрезок Πi. Из приведенных
выше рассуждений также следует, что полученная оценка области притяже-
ния не зависит от конкретных значений (положительных) коэффициентов
обратной связи в одномерных подсистемах.
Построенная таким образом оценка области притяжения, очевидно, будет
зависеть от выбранных размеров областей Πi и нижних границ βi0 секторов.
Варьируя указанные параметры, можно получать различные оценки ОП. На-
хождение “наилучшей” в том или ином смысле оценки области притяжения -
сложная задача, требующая отдельного исследования. Здесь же заметим, что
при определенных допущениях построение “наилучшей” оценки ОП может
быть сведено к решению задачи конечномерной условной оптимизации ана-
логично тому, как это было сделано в случае скалярного управления в [11],
где нахождение матрицы эллипсоида с наименьшим следом сведено к ми-
76
нимизации функции двух переменных при интервальных ограничениях на
переменные.
В заключение отметим, какую форму может принимать искомая оценка Ω
для рассматриваемых в статье канонических систем при малых n и m > 1
(при m = 1 Ω — n-мерный эллипсоид [11]). При n = m = 2 (аффинная система
с векторной относительной степенью {1, 1} [10]) роль “инвариантных эллип-
соидов” играют отрезки двух осей координат, так что оценка области при-
тяжения системы - прямоугольник (декартово произведение двух отрезков).
При n = 3, существуют две нормальные формы с относительными степеня-
ми {1, 1, 1} (m = 3) и {2, 1} (m = 2). В первом случае имеем три одномерных
подсистемы, а оценка области притяжения - параллелепипед. Во втором слу-
чае (одномерная и двумерная подсистемы) оценкой служит эллиптический
цилиндр (декартово произведение эллипса и отрезка). Отметим также, что
при произвольном n и m = n оценкой служит n-мерный параллелепипед.
6. Численные примеры
Пример 1. Рассмотрим представленную в нормальной форме двумерную
управляемую систему с двумя входами:
(27)
x1 = f1(x) + u1, x2 = f2(x) + u2,
где x ≡ [x1, x2]T, Dx = R2,
(28)
f1(x) = 3x21 sign(x1) + x22 sign(x2), f2(x) = x31 + 3x32.
Разомкнутая система имеет одно неустойчивое положение равновесия в на-
чале координат. Будем стабилизировать систему в нуле с помощью ограни-
ченных управлений |u1| ≤ 1 и |u2| ≤ 1 в виде обратной связи
(29)
ui(x) = -sat1(fi(x) + μixi)), μi
> 0, i = 1, 2.
В соответствии с описанным алгоритмом ищем области с простой грани-
цей Π1 и Π2 такие, что Ui(x) > 0, i = 1, 2, ∀x ∈ Π = Π1 × Π2, где U1(x) = 1-
-|3x21 sign(x1) + x22 sign(x2)| и U2(x) = 1 - |x31 + 3x32|. Так как подсистемы од-
номерны, кандидатами на роль Π1 и Π2 могут быть только содержащие нуле-
вую точку отрезки осей x1 и x2, длины которых не зависят от коэффициентов
обратной связи μ1 и μ2 (см. подраздел 5.3), при этом область Π - прямоуголь-
ник. Из соображений симметрии положим Π1(α1) = {x1 : -α1 < x1 < α1} и
Π2(α2) = {x2 : -α2 < x2 < α2}, α1,α2 > 0. Минимум функций U1(x) и U2(x)
на множестве Π1(α1) × Π2(α2), очевидно, достигается в углах прямоугольни-
ка с координатами (α1, α2) и (-α1, -α2). Подставляя α1 и α2 вместо x1 и x2
в функции U1(x) и U2(x), находим условия, которым должны удовлетворять
длины отрезков Π1 и Π2 для того, чтобы прямоугольник Π = Π1(α1) × Π2(α2)
был оценкой области притяжения системы:
(30)
1 - 3α21 - α22 ≥ 0, 1 - α31 - 3α32
≥ 0.
77
1
0
1
1
0
1
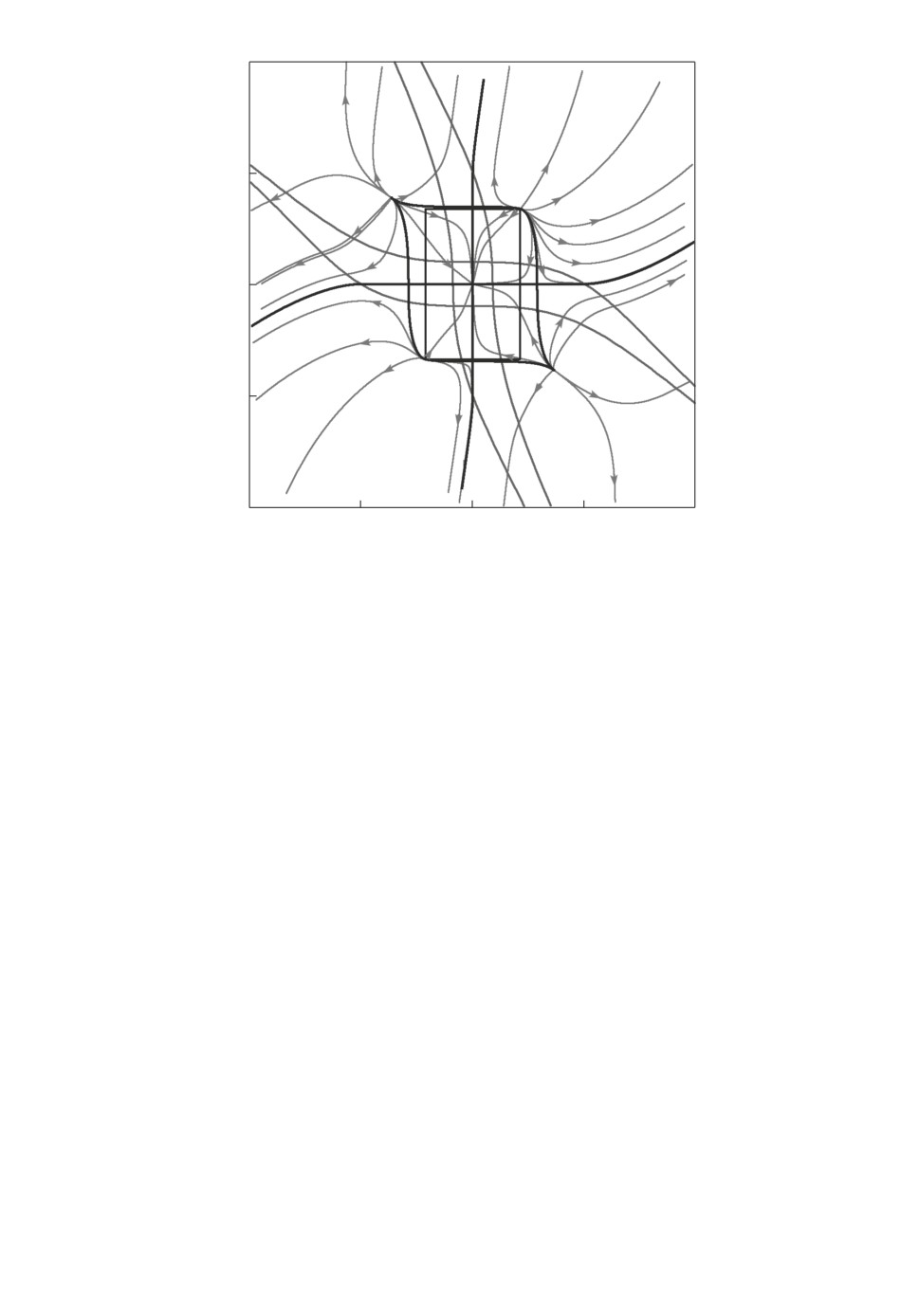
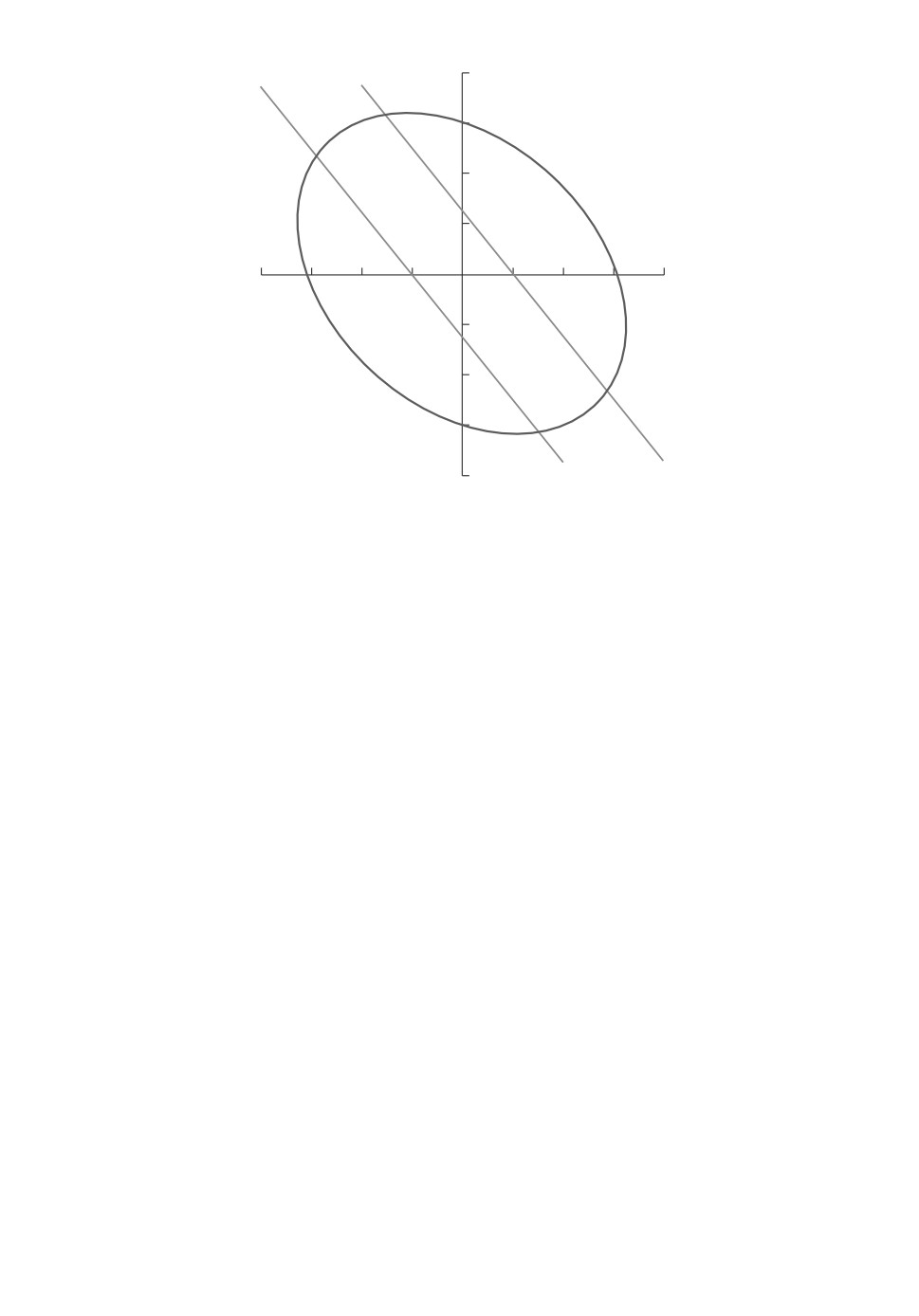
Рис. 1. Фазовый портрет замкнутой системы (27)-(29) и наилучшая прямо-
угольная оценка области притяжения.
Оценка с наибольшей площадью находится решением задачи условной оп-
тимизации: найти максимум функции max F (α1, α2), где F (α1, α2) = 4α1α2,
при ограничениях (30). Нетрудно показать, что максимум достигается в точ-
ке, в которой оба неравенства выполняются как равенства. Решение полу-
ченной системы из двух нелинейных уравнений легко находится численно:
α∗1 = 0,426 и α∗2 = 0,675. Можно показать, что найденный прямоугольник
Π1(α∗1) × Π2(α∗2) имеет не только наибольшую площадь среди всех инвари-
антных прямоугольников, но и наибольший периметр.
Фазовый портрет замкнутой системы (с коэффициентами μ1 = μ2 = 5)
изображен на рис. 1. Жирными линиями на рисунке показаны сепаратрисы,
две из которых служат границами ОП нулевого решения, и две пары кривых,
ограничивающих области линейности подсистем. Из рис. 1 также видно, что,
кроме устойчивой точки равновесия в начале координат, замкнутая система
имеет восемь неустойчивых положений равновесия: четыре седла, лежащих
на пересечении границы области устойчивости с осями координат и четыре
фокуса в “углах” границы области устойчивости. Оптимальный инвариант-
ный прямоугольник показан тонкой линией. Из рис. 1 видно, что полученная
оценка намного больше области линейности системы (пересечение двух кри-
волинейных полос, в которых одна из подсистем линейна) и довольно хорошо
аппроксимирует область притяжения.
Пример 2. Рассмотрим задачу стабилизации в вертикальном положении
двух перевернутых маятников. Обозначим через x1 и x2 угловые отклонения
маятников от вертикальной оси, а через y1 и y2 - их угловые скорости. Ма-
ятники связаны друг с другом угловой пружиной жесткости μ, создающей
78
момент μ(x1 - x2), пропорциональный относительному угловому отклонению
маятников. Входами системы служат приложенные к маятникам моменты u1
и u2. Для простоты рассмотрим одинаковые маятники и обозначим a = g/l,
где g - ускорение свободного падения и l - длина подвеса маятника. Деля обе
части уравнений колебаний маятников на момент инерции и оставляя преж-
ние обозначения для управлений и жесткости угловой пружины, получим
уравнения движения системы в виде:
x1 = y1, y1 = asin x1 - μ(x1 - x2) + u1,
(31)
x2 = y2, y2 = asin x2 + μ(x1 - x2) + u2.
Легко показать, что разомкнутая система имеет в области |xi| < 2π, i = 1, 2,
одно устойчивое положение равновесия в точке x1 = x2 = π, y1 = y2 = 0 и
одно неустойчивое положение равновесия в начале координат. Пусть ресурсы
управления ограничены |u1| ≤ u1 и |u2| ≤ u2. Будем стабилизировать систему
в нуле с помощью линеаризующей обратной связи с насыщением вида (6):
u1 = -satu1 [σ1(x1,y1) + asin x1 - μ(x1 - x2)],
(32)
u2 = -satu2 [σ2(x2,y2) + asin x2 + μ(x1 - x2)].
Для простоты возьмем одинаковые коэффициенты в линейных функциях σ1
и σ2, c11 = c21 = c1 и c12 = c22 = c2, и будем считать, что ресурсы управления
одинаковы u1 = u2 = u и удовлетворяют условию u < a (в противном случае
система может быть стабилизирована из любой начальной точки).
Замыкая систему (31) обратной связью (32), получим нелинейную дина-
мическую систему 4-го порядка:
x1 = y1,
y1 = asin x1 - μ(x1 - x2) - satu[σ(x1,y1) + asin x1 - μ(x1 - x2)],
(33)
x2 = y2,
y2 = asin x2 + μ(x1 - x2) - satu[σ(x2,y2) + asin x2 + μ(x1 - x2)].
Нетрудно показать, что, кроме нулевого решения, замкнутая система (33) бу-
дет иметь от двух до восьми (в зависимости от жесткости угловой пружины)
устойчивых положений равновесия и столько же неустойчивых положений.
При любой жесткости пружины система имеет два неустойчивых положения
равновесия x1 = x2 = ± arcsin(u/a), y1 = y2 = 0 и два устойчивых положения
x1 = x2 = π ± arcsin(u/a), y1 = y2 = 0. Если ресурс управления недостаточен
для приведения системы из заданного начального положения в начало коор-
динат, то маятники будут совершать (в общем случае - довольно сложные)
незатухающие колебания вдали от положения равновесия. Если добавить вяз-
кое трение, то система “свалится” в одно из устойчивых положений равнове-
сия, отличное от желаемого.
Напомним вкратце, как строится оценка ОП для системы
(34)
x=y, y = asinx - satu
[σ(x, y) + a sin x],
79
описывающей колебания одного маятника, стабилизируемого с помощью ли-
неаризующей обратной связи с насыщением вида (6), в рамках предложен-
ного в [11] подхода для систем со скалярным управлением. Сначала ищет-
ся область с простой границей, такая что в ней выполняется условие U0 =
= inf U(x, y) > 0, где U(x, y) = u - |a sin x|. Так как U(x, y) зависит только
от первой координаты, то естественно в качестве такой области взять полосу
|x| ≤ x0, где x0 ≤ arcsin((u - U0)/a). Для заданных 0 < U0 < u и β∗0 < β0 ≤ 1,
где β∗0 - минимальное значение β0, при котором система (23) имеет решение,
оценка области притяжения ищется в виде вписанного в полосу инвариант-
ного эллипса системы, который находится путем решения системы линейных
матричных неравенств (см. [11]). Если требуется как можно большая (в том
или ином смысле) оценка, то решается задача условной оптимизации функ-
ции двух переменных U0 и β0 [11].
Вернемся к системе (33). Согласно рассмотренному алгоритму на пер-
вом этапе требуется найти области с простой границей Π1 и Π2 в под-
пространствах переменных (x1, y1) и (x2, y2), такие что на множестве
Π = Π1 × Π2 выполняются условия Ui0 = infx∈Π Ui(x) > 0, i = 1,2, где x обо-
значает точку 4-мерного пространства состояний, x = [x1, y1, x2, y2]T, U1(x) =
= u - |asinx1 - μ(x1 - x2)| и U2(x) = u - |asinx2 + μ(x1 - x2)|. После того
как области Π1 и Π2 найдены, задача распадается на две независимые задачи
нахождения вписанных в Π1 и Π2 инвариантных эллипсов Ω1 и Ω2 двумерных
систем со скалярными входами [11] (см. также предыдущий абзац). Искомая
же оценка ОП нулевого решения системы (33) строится в виде декартова
произведения эллипсов Ω1 и Ω2.
Как и в случае одного маятника, логично выбрать области Πi, i = 1, 2,
в виде полос |xi| ≤ xi0. Для удобства иллюстраций возьмем полосы одина-
ковыми для обоих маятников: x10 = x20 = x0. Нетрудно показать, что если
жесткость пружины, связывающей маятники, не слишком велика, а именно
(
u)
(35)
μ ≤ acos arcsin
,
a
то минимум функций Ui(x), i = 1, 2, на множестве Π1 × Π2 достигается при
x1 = x2 = x0 и не зависит от μ и при этом совпадает с минимумом функ-
ции U(x1, y1) в полосе |x1| ≤ x0 в случае одного маятника: U10 = U20 = U0 =
= u - |asinx0|. Т.е. при выполнении условия (35) оценка ОП для двух свя-
занных одинаковых маятников находится как декартово произведение оценок
для двух несвязанных маятников. Нахождение оценки в случае более жесткой
пружины и/или различных маятников также не представляет трудностей, но
приводит к более громоздким формулам.
В качестве численной иллюстрации найдем оценку ОП для системы (33)
со следующими значениями параметров: a = 1, u = 0,5 (a cos(arcsin(u/a)) ≈
≈ 0,87), μ = 0,25, c1 = λ2, c2 = 2λ, λ = 2. Легко видеть, что при таком выборе
коэффициентов обратной связи в области, где управление не достигает на-
сыщения, матрицы линейных подсистем имеют кратные корни (-λ). В [22]
доказано, что в этом случае система л.м.н. (23) имеет решения при любых
1/9 < β0 ≤ 1.
80
0,4
0,3
0,2
0,1
0,4
0,3
0,2
0,1
00
0,1
0,2
0,3
0,4
0,1
0,2
0,3
0,4
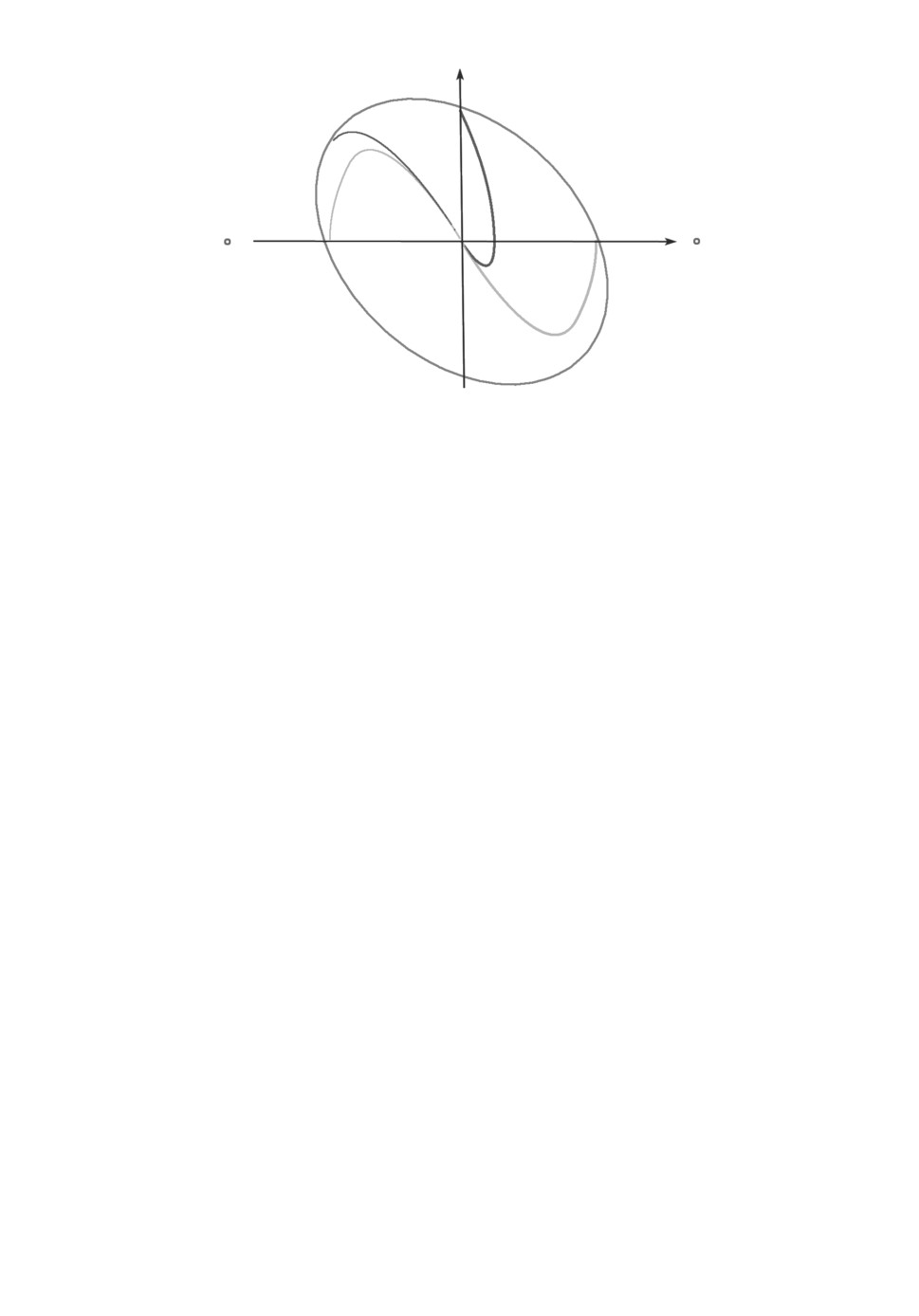
Рис. 2. Эллипсоидальная оценка области притяжения системы (34).
На рис. 2 показан инвариантный эллипс Ω(P ) системы (34), найденный в
результате решения задачи условной оптимизации (см. [11])
tr P (U0, β0) → min, 0 < U0 < 0,5, 1/9 < β0 ≤ 1,
где P (U0, β0) - решение системы л.м.н. (23), (26) и неравенства
)
( 1/x20
0
(36)
P ≥
,
0
0
обеспечивающего принадлежность эллипса полосе |x| ≤ x0, x0 = arcsin(0,5 -
- U0). Оптимальная матрица
)
( 10, 63 3, 66
P =
3, 66
11, 08
была получена при β0 = 0,121 и U0 = 0,18 (x0 ≈ 0,32). Эллипс Ω(P ) являет-
ся наилучшей (в смысле указанного критерия) эллипсоидальной оценкой ОП
для системы (34) (один маятник). Две пересекающие эллипс линии, задан-
ные уравнениями |a sin x + σ(x, y)| = ±u, ограничивают область линейности
системы (34). Как установлено выше, при заданных значениях параметров си-
стемы множество Ω(P )×Ω(P ) принадлежит ОП системы (33) (два связанных
маятника), т.е. принадлежность каждой из точек (x1(0), y1(0)) и (x2(0), y2(0))
эллипсу Ω(P ) гарантирует стабилизацию системы в положении равновесия.
К сожалению, в отличие от случая системы второго порядка (см., напри-
мер, [11] и пример 1 выше), не представляется возможным сравнить полу-
ченную оценку с истинной ОП системы, так как численное нахождение ОП
81
y
2
2
1
x
1
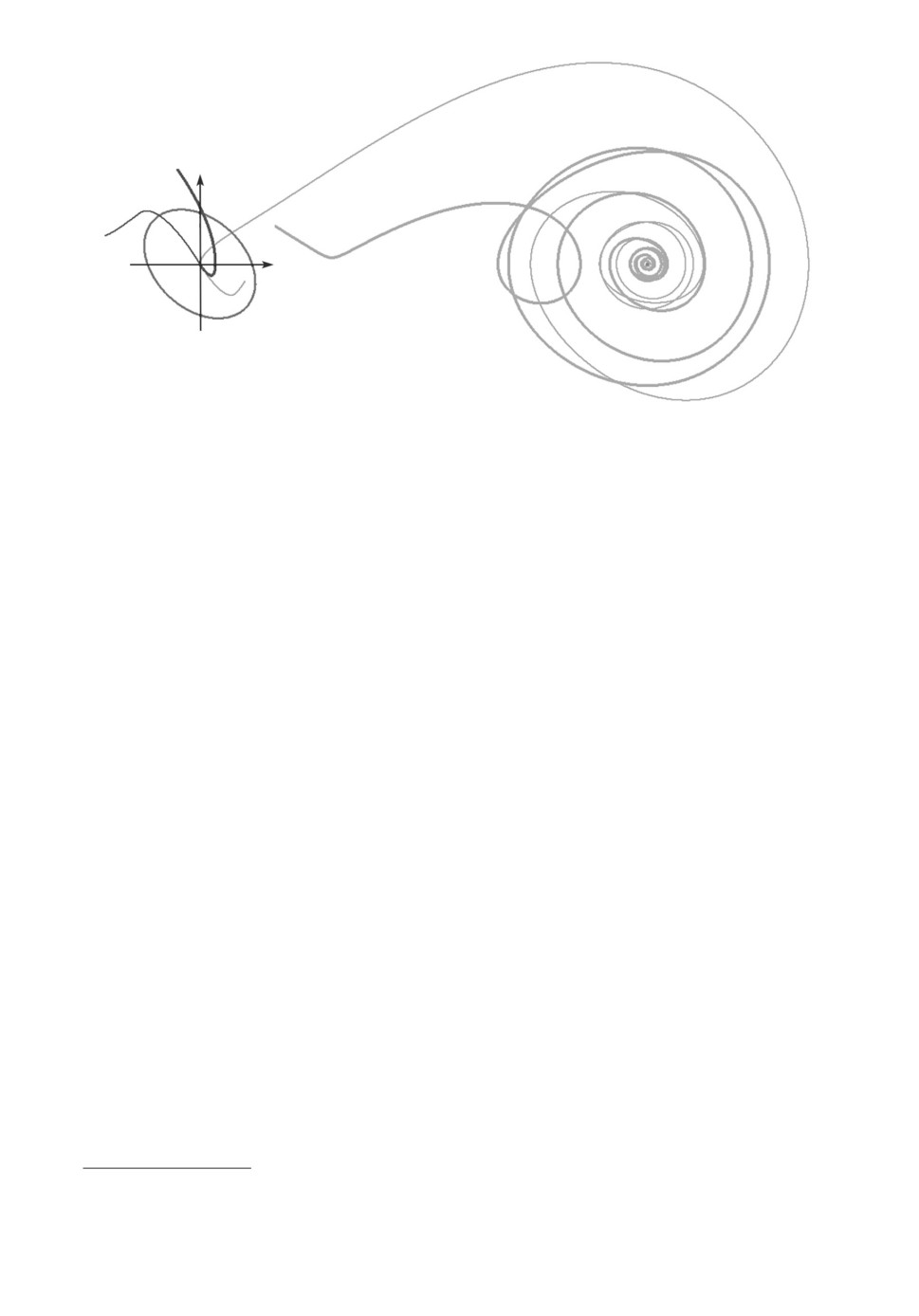
Рис. 3. Фазовые траектории маятников с начальными точками, принадлежа-
щими найденной оценке области притяжения системы (33).
требует значительных вычислительных затрат, связанных с перебором то-
чек 4-мерного пространства и решением системы уравнений (33) для каждой
из них. Другая нетривиальная задача, возникающая в этой связи, связана
с визуализацией полученных численных результатов. Действительно, любое
сечение (не представимой в виде декартова произведения) 4-мерной ОП плос-
костью, перпендикулярной осям xi и yi, где i = 1 или i = 2, дает множество
гарантирующих стабилизацию системы начальных значений одного из маят-
ников только при одном фиксированном начальном значении фазовых коор-
динат второго маятника и поэтому мало информативно.
В последующих иллюстрациях (рис. 3 и 4) 4-мерная траектория систе-
мы визуализирована в виде двух плоских кривых (x1(t), y1(t)) и (x2(t), y2(t)),
фазовых траекторий маятников, изображенных на одном рисунке. Так как в
действительности кривые принадлежат разным подпространствам, на каж-
дом из рис. 3 и 4 показаны две фазовые плоскости с совмещенными осями x1
и x2 (ось x на рис. 3 и 4) и осями y1 и y2 (ось y).
Целью проведенных численных экспериментов было проверить, действи-
тельно ли попадание начальных точек каждой из подсистем в соответствую-
щий эллипс Ω(P ) гарантирует стабилизацию системы в нулевой точке, и по-
казать, что найдутся не принадлежащие найденной оценке начальные точ-
ки, из которых система не может быть стабилизирована. Многочисленные
эксперименты со случайным размещением двух пар начальных точек как в
области Ω(P ), так и вне ее подтвердили корректность полученной оценки.
На рис. 3 показаны две начинающиеся внутри области Ω(P ) траектории
с начальными условиями x(0) = (0,3; 0; -0,3; 0) и x(0) = (0; 0,3; -0,28; 0,23)
(обозначены цифрами 1 и 2 соответственно). Фазовые траектории первого и
второго маятников нарисованы жирными и тонкими линиями соответствен-
но. Заметим, что в обоих случаях в начале движения управления достигают
насыщения и, соответственно, правые части систем нелинейны. Символами ◦
82
2
y
1
1
2
x
Рис. 4. Фазовые траектории маятников с начальными точками, не принадле-
жащими найденной оценке области притяжения системы (33).
на оси x обозначены ближайшие к нулю точки неустойчивого равновесия си-
стемы (-0,52; 0) и (0,52; 0).
На рис. 4 показаны две траектории системы, начальные точки которых не
принадлежат найденной оценке ОП Ω(P ) × Ω(P ). Первая начальная точка
x(0) = (-0,13; 0,55; -0,55; 0,17) тем не менее принадлежит ОП системы, так
как начинающаяся из нее траектория (обозначена цифрой 1) стремится к ну-
лю. Вторая точка x(0) = (0,44; 0,22; 0,26; -0,10), из которой начинается траек-
тория, обозначенная цифрой 2, как видно из рис. 4, не принадлежит ОП (при
этом начальная точка фазовой траектории второго маятника принадлежат
эллипсу Ω(P )). Ресурса управления в данном случае недостаточно и система
“сваливается” в положение устойчивого равновесия системы (33) с коорди-
натами x1 = x2 = π - arcsin(u/a) ≈ 2,62, y1 = y2 = 0, при этом в окрестности
этой точки u1 = u2 = u3.
7. Заключение
Рассмотрена задача нахождения оценки области притяжения аффинной
системы со многими входами, замкнутой линеаризующей обратной связью,
при ограниченном ресурсе управления. Предлагаемый подход к построе-
нию оценок областей притяжения основан на результатах теории абсолютной
устойчивости и является обобщением на случай векторного управления раз-
работанного ранее автором метода нахождения эллипсоидальных оценок ОП
аффинных систем с ограниченным скалярным управлением [11]. Оценка об-
ласти притяжения ищется в виде декартового произведения положительных
инвариантных множеств составляющих систему подсистем. В случае эллип-
соидальных инвариантных множеств построение оценки области притяжения
3 В численных экспериментах чтобы сделать картину колебаний более наглядной, в
правые части уравнений колебаний маятников были добавлены слагаемые α y1 и α y2, α =
= 0,1, моделирующие небольшое вязкое трение.
83
сведено к решению систем линейных матричных неравенств. Приведенные
численные примеры иллюстрируют применение предлагаемого метода для
построения оценок области притяжения положения равновесия неустойчивых
систем второго и четвертого порядков с двумя входами, стабилизируемых с
помощью ограниченной линеаризующей обратной связи.
Отметим некоторые возможные направления дальнейшего развития пред-
лагаемого в статье метода. Представляет интерес исследование возможности
использования неквадратичных функций Ляпунова с целью получения неэл-
липсоидальных инвариантных областей подсистем и тем самым более точных
аппроксимаций областей притяжения. Актуально также обобщение предлага-
емого метода на более общий случай нормальной формы, когда правая часть
каждой подсистемы зависит от нескольких, в общем случае всех, управлений.
СПИСОК ЛИТЕРАТУРЫ
1.
Tarbouriech S., Garcia G., Gomes da Silva Jr. J.M., Queinnec I. Stability and
Stabilization of Linear Systems with Saturating Actuators. London: Springer, 2011.
2.
Tarbouriech S, Turner M. Anti-Windup Design: An Overview of Some Recent
Advances and Open Problems // IET Control Theor. Appl. 2009. V. 3. No. 1.
P. 1-19.
3.
Turner M.C., Herrmann G., Postlethwaite I. Anti-windup compensation and
the control of input-constrained systems. Mathematical Methods for Robust and
Nonlinear Control / Turner M.C., Bates D.G., Eds. Berlin: Springer, 2007. P. 143-
174.
4.
Blanchini F., Miani S. Set-theoretic Methods in Control. Boston: Birkhauser, 2008.
5.
Формальский А.М. Управляемость и устойчивость систем с ограниченными ре-
сурсами. М.: Наука, 1974.
6.
Rapoport L.B. Estimation of an Attraction Domain for Multivariable Lur’e Systems
Using Looseless Extension of the S-Procedure // Proc. Am. Control Conf., San Diego,
1999. P. 2395-2396.
7.
Herrmann G., Turner M.C., Menon P.P., Bates D.G., Postlethwaite I. Anti-windup
Synthesis for Nonlinear Dynamic Inversion Controllers // Proc. IFAC Robust
Controller Design Symp. (ROCOND). Toulouse, 2006.
8.
Kapoor N., Daoutidis P. An Observer Based Anti-windup Scheme for Nonlinear
Systems with Input Constraints // Int. J. Control. 1999. V. 72. No. 1. P. 18-29.
9.
Жевнин Ф.Ф., Крищенко А.П. Управляемость нелинейных систем и синтез ал-
горитмов управления // Докл. АН СССР. 1981. Т. 258. № 4. С. 805-809.
10.
Isidori A. Nonlinear Control Systems. London: Springer, 1995.
11.
Пестерев А.В. Оценка области притяжения нулевого решения для аффинных
систем с ограниченным управлением // АиТ. 2017. № 4. С. 3-20.
Pesterev A.V. Attraction Domain Estimate for Single-Input Affine Systems with
Constrained Control // Autom. Remote Control. 2017. V. 78. No. 4. P. 581-594.
12.
Рапопорт Л.Б. Оценка области притяжения в задаче управления колесным ро-
ботом // АиТ. 2006. № 9. С. 69-89.
Rapoport L.B. Estimation of Attraction Domain in a Wheeled Robot Control
Problem // Autom. Remote Control. 2006. V. 67. No. 9. P. 1416-1435.
84
13.
Пестерев А.В., Рапопорт Л.Б. Построение инвариантных эллипсоидов в задаче
стабилизации движения колесного робота вдоль криволинейного пути // АиТ.
2009. № 2. С. 52-67.
Pesterev A.V., Rapoport L.B. Construction of Invariant Ellipsoids in the Stabilization
Problem for a Wheeled Robot Following a Curvilinear Path // Autom. Remote
Control. 2009. V. 70. No. 2. P. 219-232.
14.
Пестерев А.В. Алгоритм построения инвариантных эллипсоидов в задаче ста-
билизации движения колесного робота // АиТ. 2009. № 9. С. 100-112.
Pesterev A.V. Algorithm to Construct Invariant Ellipsoids in the Problem of
Stabilization of Wheeled Robot Motion // Autom. Remote Control. 2009. V. 70.
No. 9. P. 1528-1539.
15.
Pesterev A.V. Maximum-volume Ellipsoidal Approximation of Attraction Domain in
Stabilization Problem for Wheeled Robot // Proc. 18th IFAC World Congr., Milan,
2011. CD ROM.
16.
Айзерман М.А., Гантмахер Ф.Р. Абсолютная устойчивость регулируемых си-
стем. М.: Изд-во АН СССР, 1963.
17.
Пятницкий Е.С. Абсолютная устойчивость нестационарных нелинейных си-
стем // АиТ. 1970. № 1. С. 5-15.
Pyatnitskij E.S. Absolute Stability of Nonstationary Nonlinear Systems // Autom.
Remote Control. 1970. No. 1. P. 1-9.
18.
Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управляемость. М.: Нау-
ка, 2002.
19.
Черноусько Ф.Л. Оценивание фазового состояния динамических систем. Метод
эллипсоидов. М.: Наука, 1988.
20.
Boyd S., Ghaoui L.E., Feron E., Balakrishnan V. Linear matrix inequalities in
system and control theory. Philadelphia: SIAM, 1994.
21.
Pesterev A.V. Absolute Stability Analysis for a Linear Time Varying System of
Special Form // 2016 Int. Conf. “Stability and Oscillations of Nonlinear Control
Systems” (Pyatnitskiy’s Conf.), June 1-3, 2016. DOI: 10.1109/STAB.2016.7541213
22.
Пестерев А.В. Построение наилучшей эллипсоидальной аппроксимации области
притяжения в задаче стабилизации движения колесного робота // АиТ. 2011.
№ 3. С. 51-68.
Pesterev A.V. Construction of the Best Ellipsoidal Approximation of the Attraction
Domain in Stabilization Problem for a Wheeled Robot // Autom. Remote Control.
2011. V. 72. No. 3. P. 512-528.
Статья представлена к публикации членом редколлегии А.П. Крищенко.
Поступила в редакцию 25.07.2018
После доработки 25.07.2018
Принята к публикации 08.11.2018
85