Автоматика и телемеханика, № 6, 2019
Обзоры
© 2019 г. В.С. КОЗЯКИН, д-р физ.-мат. наук (kozyakin@iitp.ru)
(Институт проблем передачи информации им. А.А. Харкевича РАН, Москва),
Н.А. КУЗНЕЦОВ, академик РАН (kuznetsov@cplire.ru)
(Институт радиотехники и электроники им. В.А. Котельникова РАН, Москва,
Московский физико-технический институт (ГУ)),
П.Ю. ЧЕБОТАРЕВ, д-р физ.-мат. наук (pavel4e@gmail.com)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва,
Московский физико-технический институт (ГУ))
КОНСЕНСУС В АСИНХРОННЫХ МУЛЬТИАГЕНТНЫХ СИСТЕМАХ
III. КОНСТРУКТИВНАЯ УСТОЙЧИВОСТЬ
И СТАБИЛИЗИРУЕМОСТЬ1
Описаны некоторые классы линейных асинхронных мультиагентных
систем с дискретным временем, для которых проблема устойчивости до-
пускает конструктивное решение. Описан также общий аналитический
подход к построению числовых характеристик, аналогичных обобщенно-
му спектральному радиусу в теории устойчивости, которые предостав-
ляли бы возможность анализировать стабилизируемость управляемых
мультиагентных систем. Работа завершает обзор авторов “Консенсус в
асинхронных мультиагентных системах”, первые две части которого опуб-
ликованы в [1, 2].
Ключевые слова: асинхронные мультиагентные системы, консенсус,
устойчивость, стабилизируемость, марковские системы, матричные про-
изведения, совместный спектральный радиус.
DOI: 10.1134/S0005231019060011
1. Введение
Как отмечалось в первых двух частях настоящего обзора [1, 2], многие
задачи устойчивости и консенсуса линейных мультиагентных систем с дис-
кретным временем могут быть сведены к задаче о сходимости произведений
матриц, описывающих поведение агентов в последовательные промежутки
времени, с сомножителями из некоторого множества матриц. Признанным
инструментом анализа сходимости такого рода матричных произведений в
настоящее время является метод совместного спектрального радиуса набора
матриц (см., например, библиографию [3]). При этом исследование сходимо-
сти соответствующих матричных произведений оказывается принципиально
более сложной задачей по сравнению с аналогичной задачей, возникающей
1 Работа третьего автора поддержана грантом Российского научного фонда 19-19-00673,
предоставленным ИПУ им. В.А. Трапезникова РАН.
3
при анализе сходимости автономных линейных систем. В частности, как ока-
залось, в отличие от классической задачи сходимости решений автономных
линейных систем для линейных мультиагентных систем с дискретным вре-
менем общие аналитические критерии анализа устойчивости типа критериев
Рауса—Гурвица или Льенара—Шипара [4, 5] не могут существовать в прин-
ципе [6].
В этой ситуации особую роль приобретают методы численного анализа
устойчивости линейных мультиагентных систем с дискретным временем (схо-
димости матричных произведений). К сожалению, и эти методы оказываются
существенно более сложными и трудоемкими по сравнению с классическими
численными методами анализа устойчивости автономных линейных систем —
в общем случае они являются как минимум NP-сложными [7-11]. Тем не ме-
нее вполне работоспособные (для определенных классов систем) численные
методы в последние годы были разработаны, см., например, [12-28].
В связи с отмеченной выше как теоретической, так и вычислительной
сложностью анализа проблемы консенсуса и устойчивости линейных муль-
тиагентных систем с дискретным временем в общем случае особую важность
приобретает вопрос об описании отдельных классов систем, для которых со-
ответствующие вопросы допускали бы конструктивное решение. Именно это-
му кругу вопросов посвящена настоящая работа.
В разделе 2 описывается один из классов линейных переключающихся
систем, для которого вопросы устойчивости и стабилизируемости конструк-
тивно разрешимы. Предложенный в разделе подход выполнен в духе идеоло-
гии модульности конструирования систем управления — его можно сравнить
с созданием игрушек с помощью конструктора LEGO
. Напомним, что кон-
структор LEGO состоит из “кирпичиков с шипами”, соединяя которые прак-
тически в произвольном порядке (ориентированном за счет наличия шипов),
можно получать разнообразные конструкции. В изложении этого раздела бу-
дем следовать работе [29].
Как отмечалось во второй части настоящего обзора [2], для анализа устой-
чивости линейных мультиагентных систем с дискретным временем приходит-
ся прибегать к алгебраическим методам, наиболее распространенным из кото-
рых является метод совместного/обобщенного спектрального радиуса набора
матриц [3]. Однако использование методов совместного/обобщенного спект-
рального радиуса “в чистом виде” на практике не всегда возможно, поскольку
совместный/обобщенный спектральный радиус описывает асимптотическое
поведение мультиагентных систем только в классе всех (произвольных) “сра-
батываний” компонент (агентов). Поэтому в разделе 3 описывается подход,
позволяющий распространить методы совместного/обобщенного спектраль-
ного радиуса на более типичные в прикладных задачах ситуации, — когда
компоненты мультиагентных систем могут “срабатывать” не произвольным
образом, а в соответствии с некоторым марковским правилом. В частности,
в этом разделе показано, что для матричных произведений, описывающих
функционирование мультиагентных систем, в которых сомножители появля-
ются не в произвольном порядке, а подчиняются некоторому марковскому
правилу, также справедливы аналоги понятий совместного и обобщенного
спектрального радиуса. Данный подход позволил рассмотреть также ситуа-
4
цию, когда срабатывание отдельных агентов подчинено некоторым частот-
ным ограничениям — эта ситуация, естественная в практических постанов-
ках, как ни странно, долгое время не поддавалась математической формали-
зации.
Наконец, в разделе 4 описывается общий аналитический подход к построе-
нию числовых характеристик, аналогичных обобщенному спектральному ра-
диусу в теории устойчивости, которые предоставляли бы возможность ана-
лизировать стабилизируемость управляемых мультиагентных систем. С этой
целью в разделе вводятся несколько вариантов так называемых минимаксных
спектральных радиусов двух множеств матриц, один из которых описывает
функционирование агентов мультиагентной системы, а второй — допусти-
мых управлений соответствующей системы. Показывается, что в терминах
этих минимаксных радиусов можно дать необходимые и достаточные усло-
вия стабилизируемости управляемых мультиагентных систем.
2. Конструктивная устойчивость/стабилизируемость
мультиагентных систем
В абстрактной постановке линейной мультиагентной системой с дис-
кретным временем можно назвать любую систему, динамика которой (без
учета внешних возмущений) описывается уравнением
(1)
x(n + 1) = A(n)x(n), x(n) ∈ RN ,
в котором (N × N)-матрицы A(n) при каждом значении n могут произволь-
ным образом принимать значения из некоторого множества (N × N)-мат-
риц A . При этом систему (1) называют (асимптотически) устойчивой, если
для каждой последовательности матриц A(n) ∈ A , n = 0, 1, . . . , соответст-
вующее решение x(n) стремится к нулю. Асимптотическая устойчивость си-
стемы (1) равносильна экспоненциальной сходимости к нулю каждой по-
следовательности {X(n)} матричных произведений X(n) = A(n) · · · A(1)A(0)
[30-37], что в свою очередь равносильно выполнению неравенства
(2)
ρ(A ) < 1,
в котором величина ρ(A ), называемая [38] совместным спектральным ра-
диусом множества матриц A , определяется равенством
(3)
ρ(A ) = lim sup
∥An · · · A1∥1/n = inf sup ∥An · · · A1∥1/n,
n→∞ Ai∈A
n≥1 Ai∈A
где ∥ · ∥ — произвольная матричная норма в M (N, N), порождаемая соответ-
ствующей векторной нормой в RN .
Для систем (1), не обладающих свойством устойчивости, может быть по-
ставлен вопрос о существовании хотя бы одной последовательности матриц
A(n) ∈ A , n = 0, 1, . . . , для которой выполняется предельное соотношение
A(n) · · · A(1)A(0) → 0, т.е. о стабилизации системы. Система (1) допускает
стабилизацию, если выполнено неравенство
(4)
ρ(A ) < 1
5
(см. [11, 33, 39-41]), где величина ρ(A ), называемая нижним спектральным
радиусом (lower spectral radius) [33] множества матриц A , определяется ра-
венством
(5)
ρ(A ) = lim
inf
∥An · · · A1∥1/n = inf
inf
∥An · · · A1∥1/n.
n→∞
Ai∈A
n≥1
Ai∈A
Величина ρ(A ) (для произвольного, не обязательно ограниченного множе-
ства матриц) также может быть выражена равенством
ρ(A ) = lim
inf
ρ(An · · · A1)1/n = inf
inf
ρ(An · · · A1)1/n,
n→∞
Ai∈A
n≥1
Ai∈A
как было показано в [33, теорема B1] для конечных множеств A и в [39,
лемма 1.12; 41, теорема 1] для произвольных множеств A .
Неравенства (2) и (4), казалось бы, дают исчерпывающий ответ на вопрос
об устойчивости или стабилизируемости системы. С теоретической точки зре-
ния это действительно так, однако на практике воспользоваться этими крите-
риями затруднительно, поскольку вычислить пределы в формулах (3) и (5) в
явном виде достаточно сложно и, по-видимому, вообще невозможно, см., на-
пример, многочисленные отрицательные результаты в [6, 8, 43-46]. Это влечет
необходимость приближенного анализа величин (3) и (5) с привлечением чис-
ленных методов. При этом ситуация усугубляется тем, что априорные оценки
скорости сходимости в пределах (3) и (5) неизвестны, а объем необходимых
вычислений растет весьма быстро как с ростом n, так и с ростом размерности
системы.
В связи с этим отметим следующие задачи устойчивости и стабилизируе-
мости линейных переключающихся систем, не новых по сути, но остающихся
актуальными.
Задача 1. Описать классы асинхронных систем (классы множеств
матриц A ), для которых совместный спектральный радиус (3) допускал
бы эффективное вычисление.
Задача 2. Описать классы асинхронных систем (классы множеств
матриц A ), для которых нижний спектральный радиус (5) допускал бы
эффективное вычисление.
Исследование устойчивости и стабилизируемости систем (1) затрудняет-
ся еще одним обстоятельством, почти не упоминаемым в теории сходимости
матричных произведений, но критически важным в теории автоматического
управления. Дело в том, что в теории автоматического управления системы,
как правило, состоят не из одного блока, а из набора блоков, соединенных
определенным образом. В случае, когда эти блоки линейные и функциониру-
ют асинхронно, каждый из них описывается уравнением
(6)
xout(n + 1) = Ai(n)xin
(n),
6
!
!1
xin
xout
+
!
2
+
!3
+
!4
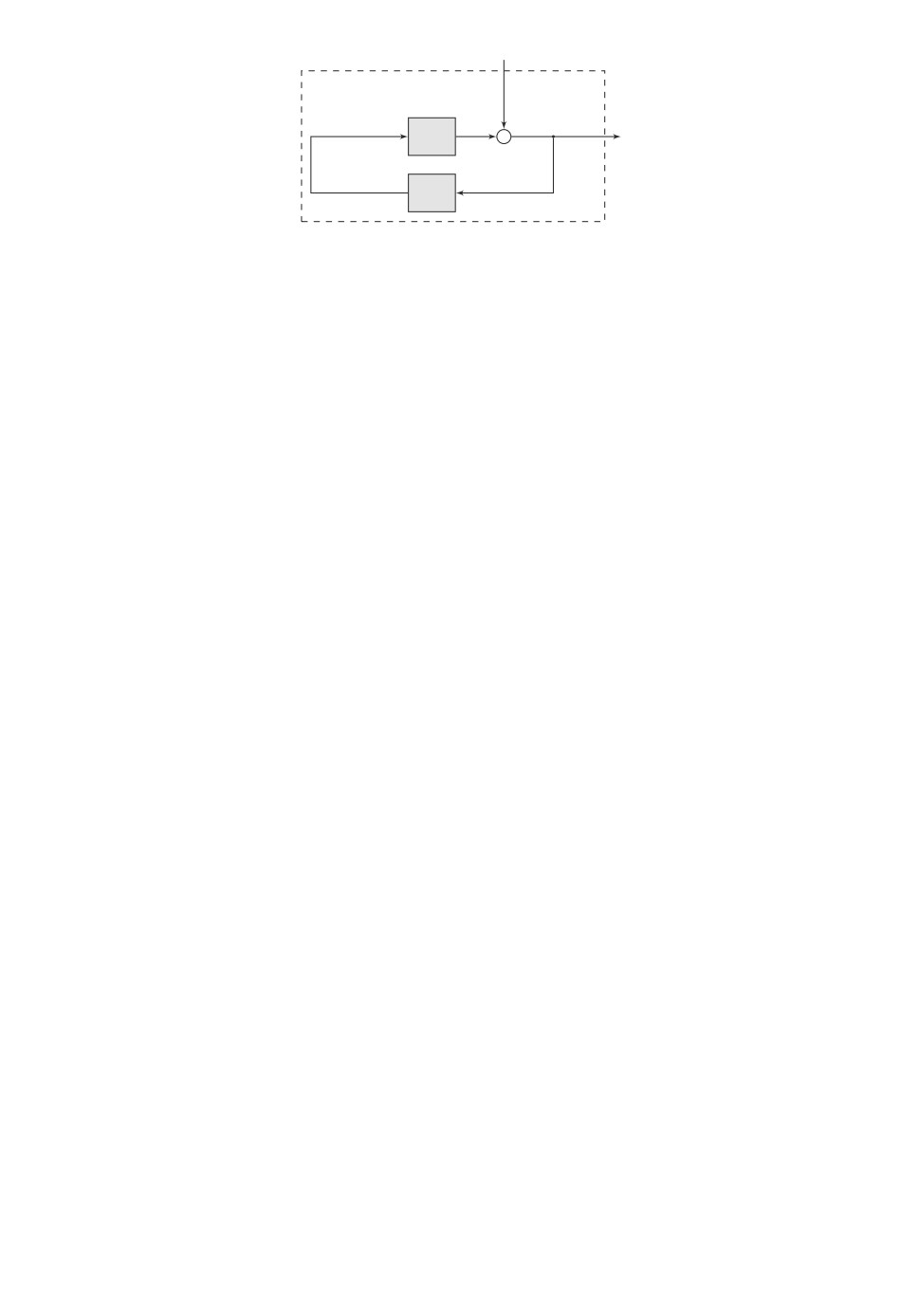
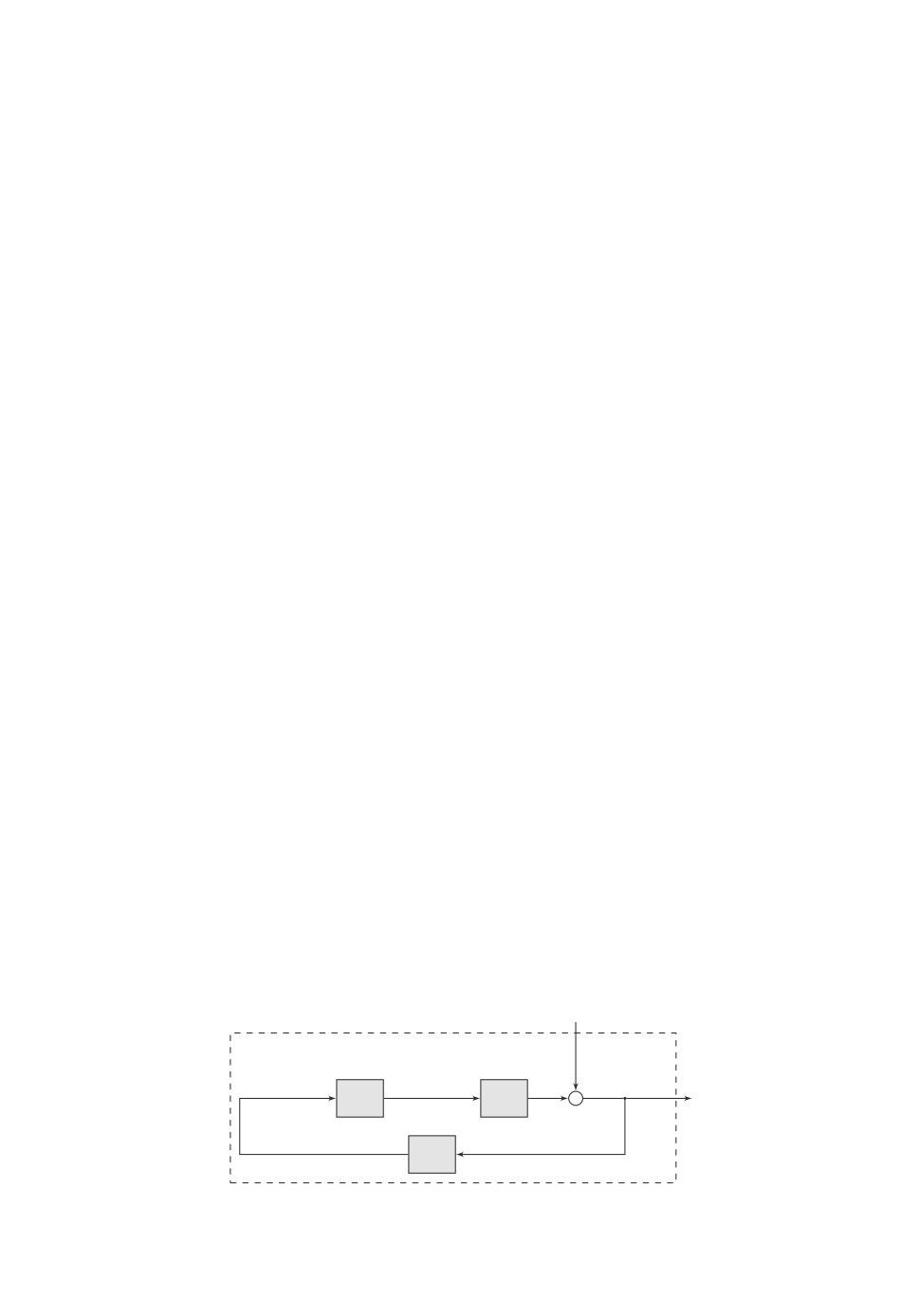
Рис. 1. Пример последовательно-параллельного соединения блоков системы.
где xin(·) ∈ RNi , xout(·) ∈ RMi , а (Ni × Mi)-матрицы Ai(n) при каждом зна-
чении n могут произвольным образом принимать значения из некоторого
множества (Ni × Mi)-матриц Ai, i = 1, . . . , Q, где Q — количество блоков в
системе.
В этом случае вопрос об устойчивости или стабилизируемости естествен-
но поставить не для отдельных блоков (6), а для системы в целом, в кото-
рой такого рода блоки могут соединяться параллельно или последовательно,
или более сложным образом, представляемым некоторым ориентированным
графом, с блоками вида (6), расположенными на ребрах графа, см. напри-
мер, рис. 1, на котором представлен пример последовательно-параллельного
соединения блоков системы: блоки A1 и A2 соединены параллельно; блок A3
соединен последовательно с группой блоков A1 и A2; блок A4 соединен парал-
лельно с группой блоков A1, A2 и A3. К сожалению, при таком соединении
блоков классы матриц, описывающих переходные характеристики системы в
целом, оказываются весьма сложными и их свойства практически не изучены.
Как правило, даже в тех случаях, когда размерности входо-выходных векто-
ров отдельных блоков совпадают друг с другом и вопрос об устойчивости
или стабилизируемости для соответствующих блоков может быть каким-то
образом решен, после последовательно-параллельного соединения таких бло-
ков конструктивный ответ на вопросы устойчивости или стабилизируемости
получить уже не удается или, в лучшем случае, получить его крайне затруд-
нительно. Таким образом, актуальной является также следующая задача:
Задача 3. Описать классы асинхронных систем, для которых ответ
на вопрос об устойчивости или стабилизируемости мог бы быть конструк-
тивно получен не только для отдельного асинхронного блока (1) или (6), но
и для последовательно-параллельного соединения таких блоков.
Наконец, рассмотрим еще один аспект проблемы конструктивной устой-
чивости или стабилизации переключающихся систем.
Как совместный спектральный радиус (3), так и нижний спектральный ра-
диус (5) характеризуют лишь устойчивость или стабилизируемость системы
“в целом”. Они описывают предельное поведение “мультипликативно усред-
ненных” норм матричных произведений ∥A(n - 1) · · · A(0)∥1/n. В типичных
ситуациях (для так называемых неприводимых2 классов матриц A ), если
2 Набор матриц называется неприводимым, если его матрицы не имеют общих инвари-
антных подпространств за исключением нулевого и всего пространства.
7
говорим об устойчивости системы, то подразумеваем [31], что для каждой
последовательности матриц {A(n)} имеет место оценка
∥A(n - 1) · · · A(0)∥ ≤ Cρn(A ).
Когда говорим о стабилизируемости системы, то подразумеваем, что в ти-
пичных ситуациях существует такая последовательность матриц {A(n)},
для которой имеет место оценка
∥A(n - 1) · · · A(0)∥
Cρn(A ).
В то же время часто возникает необходимость найти такую последова-
тельность матриц, которая обеспечивала бы наиболее медленное или наибо-
лее быстрое “убывание” не норм произведений матриц ∥A(n - 1) · · · A(0)∥, а
(при заданном начальном условии x) векторов A(n - 1) · · · A(0)x. Более точ-
но, рассмотрим вещественную функцию ν(x) ≡ ν(x1, . . . , xN ), неубывающую
по каждой координате xi вектора x = (x1, . . . , xN ) и определенную при всех
x1,... ,xN ≥ 0. Такую функцию будем называть покоординатно монотонной,
а в случае, когда она строго возрастает по каждой переменной xi, — строго
покоординатно монотонной. Например, каждая из норм
∑
√∑
∥x∥1 =
|xi|,
∥x∥2 =
|xi|2,
∥x∥∞ = max|xi|,
i
i
i
является покоординатно монотонной функцией. При этом нормы ∥x∥1 и ∥x∥2
являются строго покоординатно монотонными, а норма ∥x∥∞ покоординатно
монотонна, но не строго покоординатно монотонна.
Если множество матриц A конечно и состоит из K элементов, то для
нахождения величины
max ν(Ax)
A∈A
в общем случае необходимо K раз вычислить значения функции ν(·) и найти
среди них максимальное. Аналогично, для нахождения величины
(7)
max
ν(Ain · · · Ai1
x)
Aij ∈A
в общем случае необходимо Kn раз вычислить значения функции ν(·) и найти
среди этих значений максимальное, что с ростом n приводит к экспоненци-
альному росту количества вычислений. В связи с этим разумно поставить
следующую задачу.
Задача 4. Дана покоординатно монотонная функция ν(·) и вектор x=0.
Описать классы асинхронных систем (равносильно, классы множеств мат-
риц A ), для которых число вычислений функции ν(·), требуемых для на-
хождения величины (7), было бы меньше, чем Kn. Желательно, чтобы оно
имело порядок Kn.
8
Для величины ν(Ain · · · Ai1 x) может быть поставлена аналогичная задача
минимизации. В связи с этим целью настоящего раздела является описание
одного класса асинхронных контроллеров (1), достаточно простых и есте-
ственных в приложениях, для которых удается получить приемлемые реше-
ния задач 1-3. Задача 4 рассматривается в [29].
2.1. Множества матриц с конструктивно вычислимыми
спектральными характеристиками
Одним из классов матричных множеств, для которых величины (3) и (5)
могут быть явно вычислены, является так называемый класс множеств по-
ложительных матриц с независимым изменением строк [47], описанный в [2,
раздел 4.1].
Отметим, что контроллеры, поведение которых описывается уравнения-
ми (1) или (6) с IRU-множествами матриц, — это достаточно типичные в тео-
рии автоматического управления асинхронные контроллеры, осуществляю-
щие независимую покоординатную коррекцию входов. Контроллеры, поведе-
ние которых описывается уравнениями (1) или (6) с линейно упорядоченными
множествами положительных матриц, — это своего рода усилители сигнала
с “матричным” коэффициентом усиления, меняющимся во времени.
Из [2, теоремы 7, 8 и замечание 2] вытекает следующее утверждение.
Теорема 1. Пусть имеется система (1), образованная рекурсивным
последовательно-параллельным соединением блоков (т.е. представимая
ориентированным графом, получаемым рекурсивными последовательными
или параллельными расширениями, стартующими из одной из вершин,
и с блоками, расположенными на ребрах графа
[48, 49]), описываемых
уравнениями (6), отвечающими H -множествам положительных мат-
риц Ai, i = 1,... ,Q. Тогда вопрос об устойчивости или стабилизируемос-
ти такой системы конструктивно решается путем нахождения матриц,
доставляющих максимум или минимум величин ρmax(A ) = maxA∈A ρ(A) и
ρmin(A ) = minA∈A ρ(A) соответственно, где множество матриц A есть
полиномиальная сумма Минковского множеств матриц Ai, i = 1, . . . , Q,
отвечающая структуре соединения соответствующих блоков (см. необхо-
димые определения в [2, раздел 4.2]).
Пример 1. В системе A на рис. 1 вход и выход связаны соотношением
(
)
xout(n + 1) =
A3(n)(A1(n) + A2(n)) + A4(n)
xin(n),
где при каждом значении n матрицы A1(n), . . . , A4(n) произвольным обра-
зом выбираются из соответствующих множеств A1, . . . , A4. Соответственно,
в данном случае все возможные значения матрицы перехода системы A мо-
гут быть получены как элементы следующей полиномиальной суммы Мин-
ковского множеств матриц A1, A2, A3, A4:
P (A1, A2, A3, A4) = A3(A1 + A2) + A4.
9
2.2. Заключительные замечания
При проектировании систем управления с асинхронно срабатывающими
(переключающимися) компонентами одной из основных является проблема
оценки (вычислимости) совместного или нижнего спектральных радиусов по-
лучившейся системы, определяющих ее устойчивость или стабилизируемость
соответственно.
Предложенный в разделе подход к решению данной проблемы выполнен
в духе идеологии модульности конструирования систем управления — его
можно сравнить с созданием игрушек с помощью конструктора LEGO
Как показано в разделе, каждое H -множество матриц A также мож-
но интерпретировать как своего рода конструктор LEGO для создания
систем управления, элементами которого (кирпичиками в этом конструк-
торе) являются асинхронные блоки (контроллеры) с переходными харак-
теристиками, описываемыми множествами матриц Ai ∈ A . Тогда, как по-
казано выше, любое последовательно-параллельное рекурсивное соединение
блоков такого “конструктора” A приводит к образованию систем, совмест-
ный и нижний спектральные радиусы которых, определяющие их устойчи-
вость или стабилизируемость, всегда могут быть конструктивно вычислены,
см. [2, теоремы 6 и 8].
3. Марковские мультиагентные системы
Как видно из предыдущих разделов, см. также, библиографию [3], в насто-
ящее время математические методы анализа устойчивости линейных мульти-
агентных систем разработаны лишь для нескольких классов мультиагентных
систем — систем, рассинхронизованных по фазе, в меньшей степени для си-
стем, рассинхронизованных по частоте, и достаточно полно для систем, в
которых не накладывается никаких ограничений на “временной” характер
взаимодействия отдельных агентов (компонент).
Для анализа последнего случая в настоящее время принято использо-
вать достаточно полно разработанную в последние 30 лет теорию обобщенно-
го/совместного спектрального радиуса множеств матриц. Эта теория сводит
анализ вопросов устойчивости линейных мультиагентных систем с произволь-
ным функционированием агентов к анализу сходимости матричных произве-
дений. Одним из ключевых элементов этой теории является так называемая
формула Бергера—Ванга, устанавливающая равенство между совместным и
обобщенным спектральными радиусами семейств матриц. Для матричных
произведений, в которых сомножители появляются не в произвольном по-
рядке, а подчиняются некоторому марковскому правилу, также справедливы
аналоги понятий совместного и обобщенного спектрального радиуса. Одна-
ко известные доказательства формулы Бергера—Ванга на этот случай непо-
средственно не переносятся, поскольку они существенно используют факт
произвольности появления различных матриц в соответствующих матрич-
ных произведениях. Тем не менее формула Бергера—Ванга верна [50] и для
“марковских” аналогов совместного и обобщенного спектрального радиуса,
хотя доказательство в этом случае опирается на более изощренную технику
10
мультипликативной эргодической теории. Достаточно элементарное доказа-
тельство теоремы Дая было предложено в [51].
Изложение этого раздела базируется на [51, 52].
3.1. Марковский совместный спектральный радиус
Пусть A = {A1, . . . , AN } — конечный набор (d × d)-матриц с элементами
из поля K = R, C вещественных или комплексных чисел. Если в Kd×d задана
некоторая мультипликативная норма3 ∥ · ∥, то предел
(
)
(8)
ρ(A ) := lim
ρn(A )
= lim
ρn(A ) = inf
ρn(A )
,
n→∞
n→∞
n≥1
где
{
}
ρn(A ) := sup
∥Ain · · · Ai1 ∥1/n : ij ∈ {1, . . . , N}
,
называется совместным спектральным радиусом набора матриц A [38]. Этот
предел всегда существует, конечен и не зависит от выбора нормы ∥ · ∥. Если
A состоит из одной матрицы, то выражение (8) превращается в известную
формулу Гельфанда для спектрального радиуса линейного оператора. Поэто-
му иногда (8) называют обобщенной формулой Гельфанда [53].
Обобщенным спектральным радиусом набора матриц A называют вели-
чину, определяемую сходной с (8) формулой, в которой вместо нормы берется
спектральный радиус ρ(·) соответствующих матриц [54, 55]:
(
)
(9)
ρ(A ) := lim
ρn(A )
= sup ρn(A )
,
n→∞
n≥1
где
{
}
ρn(A ) := sup ρ(Ain · · · Ai1)1/n : ij ∈ {1, . . . , N}
Как впервые заметили М. Бергер и Я. Ванг [56], величины ρ(A ) и ρ(A )
для ограниченных семейств матриц A на самом деле совпадают:
(10)
ρ(A ) = ρ(A ).
Эта фундаментальная формула имеет многочисленные приложения в тео-
рии обобщенного/совместного спектрального радиуса. В частности, из нее
вытекает непрерывная зависимость обобщенного/совместного спектрально-
го радиуса от семейства матриц A . Другим важным следствием форму-
лы Бергера—Ванга (10) является тот факт, что величины ρn(A ) и ρn(A )
для любых n образуют нижние и верхние оценки соответственно обобщенно-
го/совместного спектрального радиуса семейства матриц A :
(11)
ρn(A ) ≤ ρ(A ) = ρ(A ) ≤ ρn(A ),
3 Норма ∥ · ∥ в пространстве линейных операторов называется мультипликативной
(sub-multiplicative), если ∥AB∥ ≤ ∥A∥ ∥B∥ для любой пары операторов A и B.
11
что может служить основой для оценки точности вычисления обобщенно-
го/совместного спектрального радиуса.
Отличительной чертой определений (8) и (9) является то обстоятельство,
что в них берутся матричные произведения Ain · · · Ai1 , отвечающие всем воз-
можным последовательностям индексов (i1, . . . , in). Более сложной является
ситуация, когда на матричные произведения Ain · · · Ai1 в (8) и (9) накладыва-
ются какие-либо дополнительные ограничения, например, в них запрещены
определенные комбинации матриц. Опишем более детально ситуацию подоб-
ного рода.
Пусть задана (N × N)-матрица Ω = (ωij ) с элементами из множе-
ства {0, 1}. Конечную последовательность (i1, . . . , in) с элементами из мно-
жества {1, . . . , N} будем называть Ω-допустимой, если ωij+1ij = 1 при всех
1 ≤ j ≤ n - 1 и, кроме того, найдется такое i∗ ∈ {1,... ,N}, что ωi∗in = 1.
Множество всех конечных Ω-допустимых последовательностей (i1, . . . , in)
обозначим через WN,Ω. Произведения матриц Ain · · · Ai1 , отвечающие Ω-до-
пустимым последовательностям (i1, . . . , in), будем называть марковскими, по-
скольку такого рода произведения естественно возникают в теории матрич-
ных коциклов над топологическими цепями Маркова, см., например, [57, 58].
Определим теперь аналоги формул (8) и (9) для Ω-допустимых матричных
произведений. Предел
(12)
ρ(A , Ω) := lim
ρn
(A , Ω),
n→∞
где
{
}
ρn(A ,Ω) := sup
∥Ain · · · Ai1 ∥1/n
: (i1, . . . , in) ∈ WN,Ω
,
назовем марковским совместным спектральным радиусом набора матриц A ,
определяемым матрицей допустимых переходов Ω. Если при некотором n
множество Ω-допустимых последовательностей (i1, . . . , in) пустое, то будем
полагать ρn(A , Ω) = 0. В этом случае при каждом k ≥ n множества Ω-до-
пустимых последовательностей (i1, . . . , ik) также будут пустыми и, следова-
тельно, ρ(A , Ω) = 0. Вопрос о существовании сколь угодно длинных Ω-до-
пустимых последовательностей решается алгоритмически за конечное число
шагов. Достаточным условием непустоты этого множества является наличие,
по крайней мере, одного ненулевого элемента в каждом столбце матрицы Ω.
Предел (12) всегда существует, конечен, не зависит от выбора нормы ∥ · ∥.
При этом, как и для (8), в силу леммы Фекете [59] (см. также [60, гл. 3, § 1])
из субмультипликативности по n величины ρnn(A , Ω) вытекает существование
предела limn→∞ ρn(A , Ω) и инфимума infn≥1 ρn(A , Ω), а также их равенство
пределу (12):
ρ(A , Ω) := lim
ρn(A ,Ω) = lim
ρn(A ,Ω) = inf
ρn(A ,Ω).
n→∞
n→∞
n≥1
Марковским обобщенным спектральным радиусом набора матриц A ,
определяемым матрицей допустимых переходов Ω, назовем величину
(13)
ρ(A , Ω) := lim
ρn
(A , Ω),
n→∞
12
где
{
}
: (i1, . . . , in) ∈ WN,Ω
ρn(A , Ω) := sup ρ(Ain · · · Ai1)1/n
Здесь, как и в предыдущем случае, будем полагать ρn(A , Ω) = 0, если мно-
жество Ω-допустимых последовательностей индексов (i1, . . . , in) пустое. При
этом, как и для (9), предел (13) совпадает с величиной supn≥1 ρn(A , Ω).
Для марковских произведений матриц справедливы аналогичные (11)
неравенства
(14)
ρn(A , Ω) ≤ ρ(A , Ω) ≤ ρ(A , Ω) ≤ ρn(A , Ω),
однако вопрос о справедливости равенства
(15)
ρ(A , Ω) = ρ(A , Ω),
аналогичного равенству Бергера—Ванга (10), становится более сложным.
Причина этого заключается в том, что известные доказательства [53, 56,
61-63] классической формулы Бергера—Ванга (10) существенно использова-
ли тот факт, что в возникающих матричных произведениях матрицы могут
перемножаться в произвольном порядке. Невозможность произвольного про-
изведения матриц при переходе к “марковскому” случаю потребовала прин-
ципиально иного подхода. Возникшие трудности были преодолены C. Даем
в [50] с использованием аппарата мультипликативной эргодической теории;
для формулировки соответствующего утверждения понадобятся вспомога-
тельные определения.
Назовем Ω-допустимую (конечную) последовательность (i1, . . . , in) перио-
дически продолжимой, если ωi1in = 1. Вообще говоря, не каждая Ω-допусти-
мая конечная последовательность периодически продолжима, но если суще-
ствуют сколь угодно длинные Ω-допустимые последовательности, то найдут-
ся и сколь угодно длинные Ω-допустимые периодически продолжимые после-
довательности. Через W(per)N,Ω будем обозначать множество всех Ω-допустимых
периодически продолжимых последовательностей.
Определим величины
{
}
ρ(per)n(A , Ω) := sup ρ(Ain · · · Ai1 )1/n : (i1, . . . , in) ∈ W(per)
N,Ω
и положим4
ρ(per)(A , Ω) := lim
ρ(per)n(A , Ω).
n→∞
Теорема 2
[50, 51]. Справедливо равенство: ρ(per)(A , Ω) = ρ(A , Ω).
Поскольку W(per)N,Ω ⊆ WN,Ω, то ρnper)(A , Ω) ≤ ρn(A , Ω) при каждом n ≥ 1,
а значит, ρ(per)(A , Ω) ≤ ρ(A , Ω). Отсюда и из (14) в силу теоремы Дая тогда
вытекает “марковский” аналог (15) формулы Бергера—Ванга (10).
4 Как и при определении марковских совместного и обобщенного спектральных ради-
усов, полагаем ρnper)(A , Ω) = 0, если множество периодически продолжимых последова-
тельностей индексов длины n пусто.
13
3.2. Системы с ограничениями на частоты срабатывания агентов
В различных теоретических и прикладных задачах возникают матричные
произведения
(16)
Aν0 Aν1 ··· Aνn
,
n ≥ 0,
где Ai — (d × d)-матрицы из некоторого конечного набора матриц A =
= {A1, . . . , Ar} c элементами из поля K = R, C вещественных или комплекс-
ных чисел, а ν = (νn) ∈ IN — некоторая последовательность символов из
множества I = {1, . . . , r}, см., например, [3, 35, 50, 64-66] и библиографию в
них.
Вопрос о скорости роста произведений матриц (16) относительно просто
(по крайней мере, теоретически) решается в “крайних” случаях, например,
когда последовательность ν = (νn) периодическая или когда в (16) рассмат-
риваются все возможные последовательности с символами из множества I =
= {1, . . . , r}. В последнем случае вопрос о скорости роста всех возможных
произведений матриц (16) дается в терминах так называемых совместного
или обобщенного спектральных радиусов набора матриц A [38, 54-56].
В “промежуточных” ситуациях, когда последовательности ν = (νn) в (16)
достаточно сложны, но в то же время не абсолютно произвольные, вопрос о
скорости роста матричных произведений (16) становится весьма нетривиаль-
ным, а ответ на него существенно зависит от структуры индексных после-
довательностей. В частности, одной из ключевых характеристик последова-
тельности индексов ν = (νn) в (16) является “частота” pi появления индекса i
в рассматриваемой последовательности.
Обычно частота pi появления индекса i в последовательности определяет-
ся как предел относительных частот pi,n появления символа i среди первых
n членов последовательности. Следует, однако, иметь в виду, что данное по-
нятие частоты с точки зрения математического формализма является доста-
точно “тонким” и “не очень конструктивным”. Уже в ситуации, когда имеешь
дело лишь с единственной последовательностью ν = (νn), данное определе-
ние зачастую оказывается недостаточно информативным, поскольку не от-
вечает на вопрос о том, “насколько часто” отдельный символ появляется на
промежуточных, не стремящихся к бесконечности конечных отрезках задан-
ной последовательности. Еще менее удовлетворительным данное определение
оказывается в ситуациях, когда приходится иметь дело не с единственной
последовательностью объектов, а с бесконечным набором таких последова-
тельностей. Одним из основных недостатков здесь оказывается то, что дан-
ное выше определение частоты “не выдерживает” предельного перехода, что
приводит к существенным теоретическим и понятийным трудностям.
Чтобы придать определению частоты “хорошие” свойства (с точки зрения
возможности применения математических методов), зачастую приходится
либо требовать какого-либо рода “равномерной” сходимости относительных
частот pi,n к pi, либо рассматривать появление соответствующих символов
в последовательности как реализацию некоторых случайных событий, или
как траектории некоторых детерминированных систем, обладающих эргоди-
ческими свойствами, и т.п. Наиболее часто для анализа поведения матричных
14
произведений (16) в последнем случае привлекается так называемая мульти-
пликативная эргодическая теорема (в вероятностной или теоретико-эргодиче-
ской постановке), см., например, [67, 68]. При этом на законы формирования
индексных последовательностей ν = (νn) приходится накладывать достаточ-
но сильные ограничения, зачастую трудно проверяемые и подтверждаемые
в приложениях. В результате получающиеся совокупности объектов хотя и
могут оказаться достаточно привлекательными с чисто математической точ-
ки зрения, но их описание становится все менее и менее конструктивным,
что приводит зачастую к появлению достаточно существенного “понятийно-
го зазора” или своего рода “натяжек” при использовании соответствующих
объектов и конструкций в приложениях.
В настоящее время существует обширная литература, в которой изучают-
ся частотные свойства различных классов символических последовательно-
стей, см., например, [58, 69-73] и их библиографию. Менее исследован воп-
рос о конструктивном определении классов символических последователь-
ностей с заданными частотными свойствами и соответствующих матричных
произведений. Лишь недавно в [50, 51] сфера применимости методов теории
совместного и обобщенного спектрального радиуса была существенно расши-
рена на уравнения (16), в которых индексные последовательности ν = (νn)
описываются топологическими цепями Маркова. В связи с этим одной из
целей работы является описание класса r-символьных последовательностей,
для которых возможно конструктивное определение “приближенных” отно-
сительных частот символов по каждому блоку из ℓ последовательно стоящих
символов (ℓ-блоку). Такое описание будет дано в терминах ℓ-кратных тополо-
гических цепей Маркова, что позволяет применить развитый в [50, 51] подход
для определения совместного/обобщенного спектрального радиуса для мат-
ричных произведений, в которых сомножители появляются не в произволь-
ном порядке, а подчиняются некоторым ограничениям по частоте.
3.3. Последовательности с ограничениями для блочных
относительных частот символов
В дальнейшем инструментом анализа будут последовательности ν = (νn),
определенные при5 n ∈ N := {0, 1, . . .} и принимающие значения из алфавита
(множества символов) I = {1, . . . , r}, см. [73]. Совокупность всех таких по-
следовательностей будем обозначать через IN, а через Il обозначим множе-
ство всех конечных последовательностей ν = (νn) длины l. Обозначим также
через I∗ = ∪l≥1Il множество всех конечных последовательностей символов
из I . Для каждой последовательности ν ∈ I∗ через |ν| будем обозначать
количество ее членов, а через |ν|i — количество символов i в этой последова-
в этом случае называется относительной частотой
|
или пропорцией вхождения символа i в последовательность ν.
Пусть имеется некоторый набор неотрицательных чисел p = (pi, . . . , pr),
∑r
сумма которых равна 1, т.е.
pi = 1, а также наборы нижних и верхних
i=1
5 В символической динамике, см., например, [58, 73, 74], часто рассматривают также
последовательности, определенные при всех целых значениях i, т.е. при i ∈ Z. В настоящем
разделе такого рода последовательности не понадобятся.
15
границ для p:
(17)
p- = (p-1,... ,p-r), p+ = (p+1,... ,p+r
),
удовлетворяющих соотношениям
(18)
0≤p-i <pi <p+i
≤ 1, i = 1, . . . , r.
Зададимся некоторым натуральным числом ℓ и обозначим через Iℓ(p±)
множество всех конечных последовательностей ν ∈ Iℓ, для которых относи-
тельные частоты вхождения символов удовлетворяют соотношениям
|ν|i
(19)
p-i ≤
≤p+i
,
i = 1,...,r.
|ν|
Переписав эти соотношения в виде p-i|ν| ≤ |ν|i ≤ p+i|ν|, где i = 1, . . . , r, мож-
но интерпретировать их как наличие неких ограничений на количество вхож-
дений различных символов в последовательности ν ∈ Iℓ, т.е. в последова-
тельности ν длины ℓ.
Наконец, через INℓ(p±) будем обозначать множество всех последователь-
ностей из IN, каждая конечная подпоследовательность ν длины ℓ которых
удовлетворяет ограничениям (19) на количество вхождений различных сим-
волов.
Пример 2. Пусть r = 3, ℓ = 10 и p = (0,23, 0,33, 0,44). Определим набо-
ры (17) нижних и верхних границ для p, полагая p-i = pi - 0,1 и p+i = pi + 0,1
при i = 1, 2, 3, т.е.
p- = (0,13, 0,23, 0,34), p+ = (0,33, 0,43, 0,54).
Тогда множеству INℓ(p±) принадлежат следующие последовательности:
ν1 = (2, 1, 2, 3, 3, 3, 2, 3, 3, 1, 2, 1, 2, 3, 1, 3, 2, 3, 3, 3,2, 1, 2, 2, 1,3, 3, 1, 3, 3, 2, 2, 1, 2, . . .),
ν2 = (3, 2, 2, 1, 3, 3, 3, 3, 2, 1, 2, 1, 2, 3, 3, 2, 3, 3, 2, 1,2, 1, 3, 1, 3,2, 3, 3, 2, 2, 1, 3, 2, 1, . . .),
ν3 = (1, 1, 3, 3, 2, 2, 1, 2, 3, 3, 1, 3, 1, 3, 2, 2, 3, 2, 2, 3,1, 3, 1, 3, 2,1, 3, 2, 2, 3, 1, 3, 1, 3, . . .).
Замечание 1. Множество Iℓ(p±) может оказаться пустым даже в
том случае, когда выполнены неравенства (18). Но если Iℓ(p±) = ∅, то и
INℓ(p±) = ∅. Чтобы убедиться в этом, достаточно взять произвольную после-
довательность ν = (ν0, ν1, . . . , νℓ-1) ∈ Iℓ(p±) и заметить, что ее продолжение
по периодичности вправо (с периодом ℓ) принадлежит INℓ(p±).
Замечание 2. В общем случае частоты появления символов i = 1,...,r
в последовательностях из INℓ(p±) не определены. Более точно это означа-
ет следующее. Обозначим через νn = (ν0, ν1, . . . , νn) начальный отрезок из
n символов для произвольной последовательности ν = (ν0, ν1, . . .) ∈ INℓ (p±).
является относительной часто-
|
той появления символа i среди первых n членов последовательности ν. От-
оказываются “близкими” к соответствующим ве-
|
личинам pi, однако в общем случае они могут не иметь пределов при n → ∞.
16
Следующая лемма дает ответ на вопрос о непустоте множества Iℓ(p±).
Напомним, что для вещественного числа x через ⌊x⌋ обозначается наиболь-
шее целое число, не превосходящее x, а через ⌈x⌉ — наименьшее целое, не
меньшее чем x.
Лемма 1. Iℓ(p±) = ∅ тогда и только тогда, когда ⌈p-i ℓ⌉ ≤ ⌊p+i ℓ⌋, i =
∑r
∑r
= 1, . . . , r и, кроме того,
⌈p-iℓ⌉ ≤ ℓ ≤
⌊p+iℓ⌋.
i=1
i=1
Пример 3. Пусть r = 3, ℓ = 10, а наборы (17) нижних и верхних гра-
ниц для p такие же, как в примере 3. Тогда ⌈p-1ℓ⌉ = 2, ⌈p-2ℓ⌉ = 3, ⌈p-3ℓ⌉ = 4,
∑r
⌊p+1ℓ⌋ = 3,
⌊p+2ℓ⌋ = 4,
⌊p+3ℓ⌋ = 5 и при этом
⌈p-iℓ⌉ = 9 ≤ ℓ ≤ 12 =
∑r
i=1
=
⌊p+iℓ⌋. Таким образом, оба условия леммы 1 выполнены.
i=1
Пусть снова p = (0,23, 0,33, 0,44), но наборы (17) нижних и верхних гра-
ниц для p теперь определены равенствами p-i = pi - 0,01 и p+i = pi + 0,01 при
i = 1,2,3, т.е.
p- = (0,22, 0,32, 0,43), p+ = (0,24, 0,34, 0,45).
В этом случае ⌈p-1 ℓ⌉ = 3, ⌈p-2 ℓ⌉ = 4, ⌈p-3 ℓ⌉ = 5, ⌊p+1 ℓ⌋ = 2, ⌊p+2 ℓ⌋ = 3, ⌊p+3 ℓ⌋ = 4
и первое условие леммы 1 не выполняется ни при одном i = 1, 2, 3.
Наконец, пусть снова p = (0,23, 0,33, 0,44), но наборы (17) нижних и
верхних границ для p на этот раз определены равенствами p-i = pi - 0,05
и p+i = pi + 0,05 при i = 1,2,3, т.е.
p- = (0,18, 0,28, 0,39), p+ = (0,28, 0,38, 0,49).
В этом случае ⌈p-1ℓ⌉ = 2, ⌈p-2ℓ⌉ = 3, ⌈p-3ℓ⌉ = 4, ⌊p+1ℓ⌋ = 2, ⌊p+2ℓ⌋ = 3, ⌊p+3ℓ⌋ =
= 4 и первое условие леммы 1 выполняется при каждом i = 1,2,3, но второе
∑r
условие леммы 1 не выполнено, поскольку
⌊p+iℓ⌋ = 9 < ℓ.
i=1
Из леммы 1 и примера 3 видно, что для непустоты множества Iℓ(p±) необ-
ходимо, чтобы “зазор” между соответствующими величинами p-i и p+i был не
слишком мал. Это означает, что апериодическое поведение последователь-
ностей из INℓ(p±) может наблюдаться только в том случае, когда “зазор”
между соответствующими величинами p-i и p+i окажется настолько “велик”,
чтобы выполнялось первое условие леммы 1, а во втором условии леммы 1
оба неравенства оказались строгими.
Замечание 3. Обнаружить в литературе явное упоминание о символи-
ческих последовательностях с разрешенными ℓ-блоками типа Iℓ(p±) не уда-
лось. Тем не менее близкие символические последовательности возникают
во многих прикладных и теоретических исследованиях. Cимволические по-
следовательности с разрешенными ℓ-блоками типа Iℓ(p±) могут рассмат-
риваться как “последовательности с ограничениями”, возникающие в теории
бесшумных каналов передачи данных с ограничениями (constrained noiseless
channels) [69, гл. 17]. Вопрос о частотных свойствах таких последовательно-
стей с определенными разрешенными или запрещенными комбинациями сим-
волов изучался, например, в [70, 71, 75], причем в [70, 71] для этих целей была
привлечена теория совместного спектрального радиуса. Идейно близкими яв-
ляются также последовательности с (d, k)-ограничениями ((d, k)-constrained
17
sequences), возникающие в методе RLL-кодирования (RLL coding, runlength-
limited coding), используемом при кодировании информации на жестких дис-
ках, CD и DVD дисках и пр., см., например, [58, 72].
Символические последовательности с разрешенными ℓ-блоками ти-
па Iℓ(p±) сходны с так называемыми k-сбалансированными последователь-
ностями (k-balanced sequences) [58, 73], хотя и образуют более широкий класс.
Символические последовательности с разрешенными ℓ-блоками типа Iℓ(p±)
могут не иметь предельных частот отдельных символов, что отличает их от
символических последовательностей, относительные частоты символов в ко-
торых равномерно сходятся [76].
3.4. Кратные топологические цепи Маркова
Покажем, что множество бесконечных последовательностей INℓ(p±) мо-
жет естественным образом трактоваться как так называемая ℓ-кратная то-
пологическая цепь Маркова (или сдвиг конечного типа). Напомним необхо-
димые определения, следуя [57, 73].
Как обычно, оператор σ : ν → ν′, переводящий последовательность
ν = (νn)n∈N ∈ I N в последовательность ν′ = (ν′n)n∈N ∈ I N, определяемую
равенствами ν′n = νn+1 при n ∈ N, будет называться левым сдвигом или про-
сто сдвигом на IN. Пусть задана квадратная матрица ω = (ωij)ri,j=1 порядка
r с элементами из множества {0,1}. Положим
{
}
INω := ν = (νn) ∈ IN : ωνnνn+1 = 1, n ∈ N
Другими словами, матрица ω определяет все допустимые переходы между
символами алфавита I = {1, . . . , r} в последовательностях из INω. В этом
случае ограничение отображения сдвига σ на INω называют топологической
цепью Маркова, определяемой матрицей допустимых переходов ω [57, 73].
Отображение σ называют также сдвигом конечного типа6.
Имеется естественный класс более общих символических систем, чем цепи
Маркова. Пусть задано отображение
Ω : Iℓ+1 → {0,1}
и
{
}
INΩ := ν = (νn) ∈ IN : Ω(νn,... ,νn+ℓ) = 1, n ∈ N
Тогда ограничение отображения сдвига σ на INΩ называют ℓ-кратной тополо-
гической цепью Маркова, определяемой функцией допустимых переходов Ω.
С точки зрения динамики ℓ-кратные топологические цепи Маркова — это
то же самое, что и (обычные) топологические цепи Маркова, так как они
6 Иногда термины “топологическая цепь Маркова” или “сдвиг конечного типа” приме-
няют к самому множеству последовательностей INΩ.
18
могут быть описаны как топологические цепи Маркова с алфавитом I =
= {1, . . . , r}ℓ и такой матрицей ω, что
ω(ν1,...,νℓ),(ν′1,...,ν′ℓ) = 1,
если ν′k = νk+1 при k = 1, . . . , ℓ - 1 и Ω(ν1, . . . , νℓ, ν′ℓ) = 1, см., например, [57,
раздел 1.9].
Теорема 3. Пусть для некоторых наборов чисел
p- = (p-1,... ,p-r), p+ = (p+1,... ,p+r),
удовлетворяющих соотношениям (18), выполняются условия леммы 1. То-
гда сужение сдвига σ на множество INℓ(p±) является ℓ-кратной тополо-
гической цепью Маркова.
Несмотря на очевидность, теорема 3 имеет принципиальное значение, по-
скольку позволяет трактовать символические последовательности с ограни-
чениями для блочных относительных частот символов как (кратные) цепи
Маркова.
3.5. Ограниченный совместный/обобщенный спектральный радиус
Пусть, как и в предыдущем разделе, A = {A1, . . . , Ar} — некоторый ко-
нечный набор матриц c элементами из поля K = R, C вещественных или ком-
плексных чисел. Зададимся некоторым целым числом ℓ и наборами чисел
pi, p±i, i = 1,... ,r, удовлетворяющими ограничениям (18). Конечную после-
довательность ν = (ν1, . . . , νn) с элементами из множества I будем назы-
вать Iℓ(p±)-допустимой, если ν ∈ I∗ℓ(p±), т.е. каждая ее подпоследователь-
ность (νj , . . . , νj+ℓ-1) длины ℓ принадлежит Iℓ(p±), а каждая из подпосле-
довательностей длины, меньшей ℓ, допускает дополнение справа до после-
довательностей из Iℓ(p±). Множество всех конечных Iℓ(p±)-допустимых
последовательностей ν = (ν1, . . . , νn) обозначим через WIℓ(p±). Произведе-
ния матриц Aνn · · · Aν1 , отвечающие Iℓ(p±)-допустимым последовательно-
стям (ν1, . . . , νn), будем называть Iℓ(p±)-допустимыми.
Теперь можно определить понятия совместного и обобщенного спектраль-
ных радиусов для Iℓ(p±)-допустимых произведений матриц из A , почти до-
словно повторяя соответствующие определения из предыдущего раздела.
Предел
(
)
(
)
(20)
ρ
A ,Iℓ(p±)
:= lim
ρn
A ,Iℓ(p±)
,
n→∞
где
{
}
ρn(A ,Iℓ(p±)) := sup
∥Aνn · · · Aν1 ∥1/n
: (ν1, . . . , νn) ∈ WIℓ(p±)
,
назовем Iℓ(p±)-ограниченным совместным спектральным радиусом.
Предел (20) всегда существует, конечен и не зависит от нормы ∥ · ∥. При
этом множества I∗ℓ(p±) обладают свойством субаддитивности, а тогда вели-
чина ρnn(A , Iℓ(p±)) субмультипликативна по n. Поэтому по лемме Фекете [59]
19
(см. также [60, гл. 3, § 1]) существует предел limn→∞ ρn(A , Iℓ(p±)), совпа-
дающий как с ρ(A , Iℓ(p±)), так и с инфимумом infn≥1 ρn(A , Iℓ(p±)), т.е.
Iℓ(p±)-ограниченный совместный спектральный радиус можно определить
любым из следующих равенств:
(
)
(
)
ρ
A ,Iℓ(p±)
:= lim
ρn
A ,Iℓ(p±)
=
n→∞
(
)
(
)
= lim
ρn
A ,Iℓ(p±)
= inf
ρn
A ,Iℓ(p±)
n→∞
n≥1
Аналогично естественно назвать Iℓ(p±)-ограниченным обобщенным спек-
тральным радиусом набора матриц A величину
(
)
(
)
ρ
A ,Iℓ(p±)
:= lim
ρn
A ,Iℓ(p±)
,
n→∞
где
{
}
(
)
ρn
A ,Iℓ(p±)
:= sup ρ(Aνn · · · Aν1 )1/n
: (ν1, . . . , νn) ∈ WIℓ(p±)
Для Iℓ(p±)-допустимых произведений матриц выполняются неравенства
(
)
(
)
(
)
(
)
(21)
ρn
A ,Iℓ(p±)
≤ ρ
A ,Iℓ(p±)
≤ρ
A ,Iℓ(p±)
≤ρn
A ,Iℓ(p±)
,
аналогичные (11) или (14). В то же время вопрос о справедливости равенства
(
)
(22)
ρ
A ,Iℓ(p±)
= ρ(A , Iℓ(p±
)),
аналогичного равенству Бергера—Ванга (10), как и в случае марковских ана-
логов совместного и обобщенного спектральных радиусов, менее очевиден.
Назовем Iℓ(p±)-допустимую конечную последовательность (ν0, . . . , νn-1) пе-
риодически продолжимой, если она может быть продолжена вправо до n-пе-
риодической последовательности из INℓ(p±). Множество всех Iℓ(p±)-допус-
тимых периодически продолжимых последовательностей обозначим через
W(per)
. Очевидно, это множество непусто, если непусто множество Iℓ(p±),
Iℓ(p±)
поскольку каждая последовательность из Iℓ(p±) допускает ℓ-периодическое
продолжение вправо.
Определим величины
{
}
(
)
ρ(per)n
A ,Iℓ(p±)
:= sup ρ(Aνn · · · Aν1 )1/n : (ν1, . . . , νn) ∈ W(per)
Iℓ(p±)
и положим
(
)
(
)
ρ(per)
A ,Iℓ(p±)
:= lim
ρ(per)n
A ,Iℓ(p±)
n→∞
В этом случае справедливо следующее обобщение формулы Бергера—Ван-
га на случай матричных произведений с ограничениями для блочных относи-
тельных частот сомножителей или, что то же, на случай Iℓ(p±)-допустимых
матричных произведений.
20
Теорема 4. Справедливо равенство: ρ(per)(A ,Iℓ(p±)) = ρ(A ,Iℓ(p±)).
Поскольку W(per)
⊆ WIℓ(p±), то ρnper)(A ,Iℓ(p±)) ≤ ρn(A ,Iℓ(p±)) при
Iℓ(p±)
каждом n ≥ 1, а значит, ρ(per)(A , Iℓ(p±)) ≤ ρ(A , Iℓ(p±)). Отсюда и из (21)
в силу теоремы 4 тогда вытекает аналог (22) формулы Бергера—Ванга (10)
для матричных произведений с ограничениями на блочные относительные
частоты сомножителей.
Замечание 4. В настоящем разделе допустимые последовательности
были определены следующим образом: было задано множество P = Iℓ(p±)
последовательностей длины ℓ и допустимыми считались все конечные по-
следовательности длины, меньшей ℓ, допускающие дополнение справа до по-
следовательностей из P, а также последовательности длины, большей или
равной ℓ, каждая конечная подпоследовательность которых длины ℓ принад-
лежит P.
В данном определении конкретный вид множества P не принципиален.
Поэтому все конструкции данного раздела сохранят силу для произвольного
выбора множеств P и соответствующим образом определенных допустимых
последовательностей, ср. [75]. При этом, конечно, вопрос о непустоте множе-
ства допустимых последовательностей должен решаться отдельно.
4. Минимаксный совместный спектральный радиус и
стабилизируемость мультиагентных линейных систем
Изложение настоящего раздела основано на работе [77].
Разнообразные прикладные и теоретические задачи вычислительной ма-
тематики, теории управления, теории кодирования, комбинаторики и др.
приводят к необходимости знать скорость роста/убывания произведений
(N × N)-матриц An · · · A1 с сомножителями из некоторого множества мат-
риц A , см., например, [11, 39], а также библиографию [3]. Для оценки скоро-
сти роста соответствующих матричных произведений принято использовать
такие числовые характеристики множества матриц A , как совместный спек-
тральный радиус [38]
{
}
(23)
ρ(A ) = lim sup
∥An · · · A1∥n : Ai ∈ A
n→∞
и нижний спектральный радиус [33]
{
}
(24)
ρ(A ) = lim
inf
∥An · · · A1∥n : Ai ∈ A
,
n→∞
называемый также совместным спектральным подрадиусом. Пределы в (23)
и (24) всегда существуют и не зависят от нормы ∥ · ∥ на пространстве мат-
риц размерности N × N; соответствующие доказательства с историческими
комментариями можно найти, например, в [11, 39].
Понятия совместного и нижнего спектральных радиусов возникли во вто-
рой половине XX в., и к настоящему моменту их исследованию посвящено
21
несколько сотен публикаций, см. например, [3, 11]. Одной из областей, в ко-
торых применение совместного и нижнего спектрального радиусов оказы-
вается наиболее естественным и продуктивным, является теория линейных
переключающихся систем с дискретным временем. В частности, неравенство
ρ(A ) < 1 оказывается критерием устойчивости линейной переключающейся
системы с дискретным временем [53, 78], а неравенство ρ(A ) < 1 — критерием
стабилизируемости.
Несмотря на то, что совместный и нижний спектральные радиусы опре-
деляются “почти одинаковыми” равенствами (23) и (24), их свойства суще-
ственно различаются. Достаточно упомянуть лишь тот факт, что совместный
спектральный радиус ρ(A ) в естественном смысле непрерывно зависит от
множества A , в то время как нижний спектральный радиус ρ(A ) в общем
случае не является непрерывной функцией множества A , строгие формули-
ровки см., например, в [41, 79]. Более того, ряд свойств совместного и нижнего
спектральных радиусов, которые в окончательной формулировке выглядят
одинаково, доказываются с помощью совершенно разных подходов.
Сказанное вызывает естественное, на взгляд авторов, желание ввести
некую характеристику матричных произведений, которая объединяла бы
понятия как совместного, так и нижнего спектральных радиусов. Для ре-
ализации этой идеи в разделе рассматриваются матричные произведения
AnBn ··· A1B1 с сомножителями Ai ∈ A , Bi ∈ B размерностей N × M и
M × N соответственно из двух различных множеств матриц A и B, для
которых определяются числовые величины
μ(A , B) = lim
max
min
∥AnBn · · · A1B1∥n ,
n→∞
Ai∈A
Bi∈B
η(A , B) = lim
min
max
∥AnBn · · · A1B1∥n ,
n→∞
Bi∈B
Ai∈A
называемые далее нижним и верхним минимаксными совместными спек-
тральными радиусами пары {A , B}. Обе величины μ(A , B) и η(A , B) харак-
теризуют максимальную скорость роста матричных произведений AnBn · · ·
···A1B1 по всем наборам матриц Ai ∈ A и минимальную скорость роста по
всем наборам матриц Bi ∈ B.
4.1. Устойчивость/стабилизируемость неуправляемых линейных систем
Напомним теоретико-управленческую мотивацию привлечения понятий
совместного и нижнего спектральных радиусов для анализа проблемы устой-
чивости и стабилизируемости линейных (неуправляемых) переключающихся
систем.
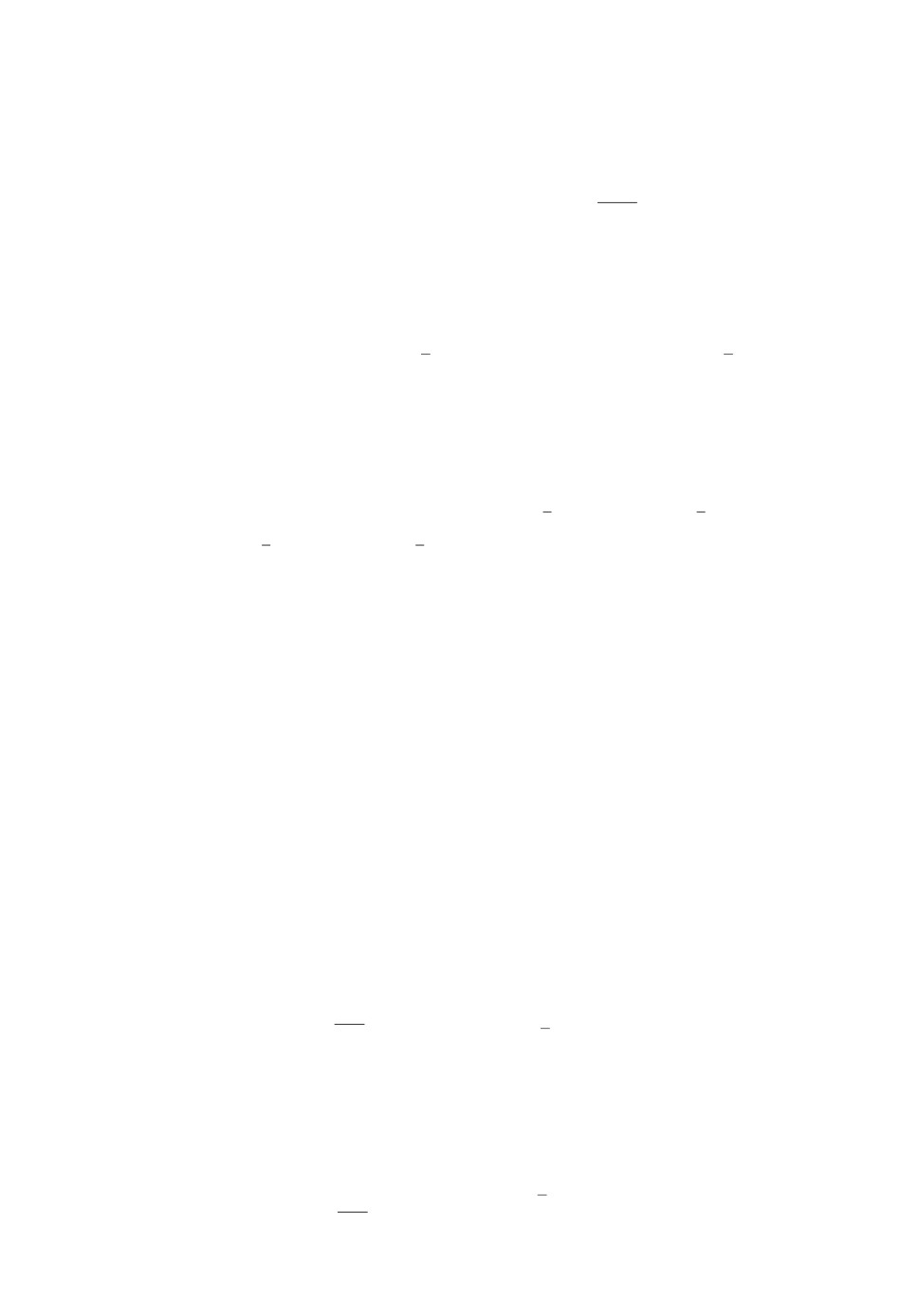
Рассмотрим изображенную на рис. 2 переключающуюся динамическую си-
стему A с дискретным временем, состоящую из объекта A , выход которого,
аддитивно возмущенный внешним воздействием f, замыкается на вход с по-
мощью задержки в обратной связи.
Будем считать, что при каждом значении времени n = 1, 2, . . . выход xout
и вход xin объекта A связаны линейным уравнением
(25)
xout = Anxin,
xin,xout ∈ RN,
22
f(n)
A
x(n
1)
x(n)
!
+
z1
Рис. 2. Линейная переключающаяся система с дискретным временем.
где An является матрицей размерности N × N, принимающей значения из
некоторого конечного множества матриц A .
Последовательность матриц {An} в зависимости от контекста может ли-
бо определяться внешними возмущениями, либо формироваться специаль-
ным образом с целью придания всей системе некоторых свойств. Вектор-
функция f(n) представляет аддитивные внешние воздействия на вектор со-
стояния системы x. Блок z-1 является элементом запаздывания на единицу
времени (на один такт). В этом случае динамика рассматриваемой системы
описывается неоднородным уравнением
x(n) = Anx(n - 1) + f(n),
n = 1,2...,
в котором переменные x(n) и f(n) предполагаются вектор-столбцами размер-
ности N.
В том случае, когда аддитивные внешние воздействия f отсутствуют, т.е.
f (n) ≡ 0, динамика системы описывается однородным уравнением
(26)
x(n) = An
x(n - 1),
n = 1,2,...
Определение 1. Систему A с нулевым входом f, описываемую уравне-
нием (26), называют асимптотически устойчивой в классе всех матриц A ,
если
(27)
x(n) = An · · · A1
x(0) → 0
при n → ∞
для любой последовательности матриц {An ∈ A } и любого начального усло-
вия x(0).
Как известно [32, 33, 50, 54, 56, 68, 80], сходимость к нулю каждого реше-
ния уравнения (26) в классе матриц A влечет более сильное свойство экспо-
ненциальной сходимости к нулю каждой последовательности {Xn} матрич-
ных произведений Xn = An · · · A1, т.е. существование таких констант C > 0
и λ ∈ (0,1) (не зависящих от матричных сомножителей A1,...,An), что
∥An · · · A1∥ ≤ Cλn, где ∥ · ∥ — некоторая норма на пространстве (N × N)-мат-
риц. Последнее свойство, в свою очередь, влечет выполнение неравенства
ρ(A ) < 1, где ρ(A ) — совместный спектральный радиус множества мат-
риц A , определяемый равенством (23). С другой стороны, выполнение нера-
венства ρ(A ) < 1 очевидным образом влечет сходимость к нулю каждой по-
следовательности матриц Xn = An · · · A1 с сомножителями из A . Отсюда вы-
текает следующее утверждение.
23
Предложение 1. Система A с нулевым входом f, описываемая уравне-
нием (26), асимптотически устойчива в классе матриц A тогда и только
тогда, когда ρ(A ) < 1.
Определение 2. Систему A с нулевым входом f называют поточечно
стабилизируемой в классе всех матриц A , если для каждого начального
условия x(0) найдется такая последовательность матриц {An ∈ A }, для
которой имеет место сходимость (27).
Определение 3. Систему A с нулевым входом f назовем равномерно
стабилизируемой или просто стабилизируемой в классе всех матриц A ,
если найдется такая последовательность матриц {An ∈ A }, что сходи-
мость (27) имеет место для каждого начального условия x(0).
Очевидно, равномерная стабилизируемость системы A с нулевым вхо-
дом f равносильна условию существования такой последовательности матриц
{An ∈ A }, для которой матричные произведения An · · · A1 сходятся к нулю
по норме:
∥An · · · A1∥ → 0 при n → ∞.
В литературе для обозначения понятий, эквивалентных поточечной или
равномерной стабилизируемости, применяется различная терминология. На-
пример, в ряде работ вместо термина стабилизируемость используется бо-
лее широкий термин управляемость, восходящий к Р. Калману, см., напри-
мер, [36, 81, 82]. В [83] для понятий поточечной или равномерной стабили-
зируемости применяются термины поточечная или равномерная сходимости
матричных произведений с матрицами из A . Равномерная сходимость мат-
риц влечет их поточечную сходимость, в то время как обратное утверждение
неверно.
Пример 4
[83, 84]. Произведения матриц из множества
{[
]
]}
1
[ √3
1
0
2
2
2
A =
,
√
0
2
3
-1
2
2
сходятся поточечно, но не являются сходящимися равномерно.
Для характеризации стабилизируемости удобно использовать нижний
спектральный радиус ρ(A ), определяемый равенством (24). В частности, име-
ет место следующее утверждение.
Предложение 2. Система A с нулевым входом f, описываемая урав-
нением (26), равномерно стабилизируема тогда и только тогда, когда
ρ(A )<1.
Достаточность условия ρ(A ) < 1 для стабилизируемости следует непо-
средственно из формулы (24). А как показано в [81, предложение 1; 82, тео-
рема 3.9; 83], стабилизируемость системы A, описываемой уравнением (26),
влечет неравенство ρ(A ) < 1.
Таким образом, предложения 1 и 2 показывают, что совместный и ниж-
ний спектральный радиусы являются удобным аналитическим средством при
24
анализе устойчивости и стабилизируемости (неуправляемых) линейных пе-
реключающихся систем. К сожалению, вычисление как совместного, так и
нижнего спектрального радиуса является сложной задачей, и лишь в исклю-
чительных случаях удается описать классы матриц, для которых эти харак-
теристики могут быть вычислены в явном “формульном” виде, см., например,
библиографию в [3, 11, 85, 86].
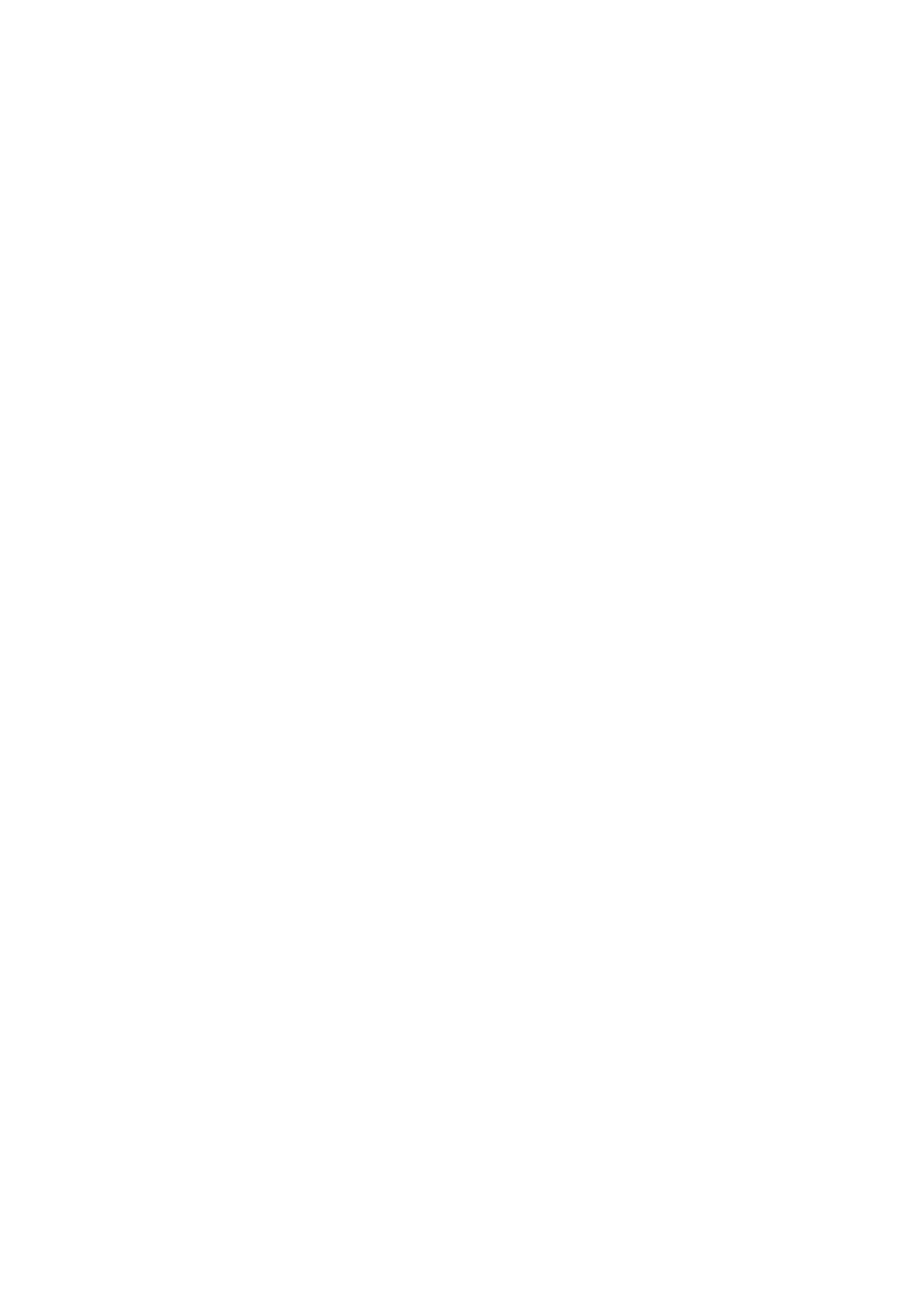
4.2. Стабилизируемость управляемых линейных систем
Обратимся к более реалистичной системе управления AB с дискретным
временем, которая включает в себя не только объект управления A , но и
контроллер B, см. рис. 3.
Относительно объекта A будут делаться те же предположения, что и в
предыдущем разделе, а именно, будем считать что при каждом n = 1, 2, . . .
выход xout объекта A связан с его входом xin линейным уравнением
xout = Anxin,
xin ∈ RM , xout ∈ RN,
где An является матрицей размерности N × M, принимающей значения из
некоторого конечного множества матриц A . Отличие от предположений (25),
накладывавшихся на объект A в разделе 4.1, заключается в том, что в дан-
ном случае размерности входов и выходов объекта A не обязаны совпадать.
Контроллер B также будет предполагаться функционирующим при каж-
дом n = 1, 2, . . . в соответствии с линейным уравнением
uout = Bnuin,
uout ∈ RM, uin ∈ RN,
в котором матрица Bn размерности M × N может выбираться из некоторого
конечного множества матриц B. Множество B можно трактовать как мно-
жество всех доступных управлений.
В данном контексте последовательность матриц
{An} определяется
(неконтролируемыми) внешними возмущениями объекта управления, а по-
следовательность матриц {Bn} представляет управляющие воздействия кон-
троллера, с помощью которых можно пытаться придать те или иные свой-
ства рассматриваемой системе. Вектор-функция f(n) представляет аддитив-
ные входные воздействия на вектор состояния системы. Блок z-1, как и в
разделе 4.1, является элементом запаздывания на единицу времени (на один
f(n)
AB
x(n
1)
u(n
1)
x(n)
@
!
+
z1
Рис. 3. Cистема управления, состоящая из объекта A и контроллера B.
25
такт). В этом случае динамика рассматриваемой системы описывается урав-
нением
x(n) = AnBnx(n - 1) + f(n),
n = 1,2...,
где x(n) и f(n) являются вектор-столбцами размерности N.
Снова, чтобы не отвлекаться на несущественные детали, будем интере-
соваться только вопросами устойчивости и стабилизируемости нулевого ре-
шения системы, изображенной на рис. 3, в случае нулевого внешнего воздей-
ствия f, т.е. когда f(n)≡0. Динамика такой системы описывается уравнением
(28)
x(n) = AnBn
x(n - 1),
n = 1,2...
Для системы управления AB с нулевым входом f, описываемой уравне-
нием (28), могут быть поставлены вопросы об (асимптотической) устойчиво-
сти и стабилизируемости, аналогичные тем, которые были поставлены для
системы A.
Определение 4. Систему AB с нулевым входом f назовем асимпто-
тически устойчивой в классе всех возмущений A объекта A и управле-
ний B контроллера B, если
(29)
x(n) = AnBn · · · A1B1
x(0) → 0
при n → ∞
для любых последовательностей матриц {An ∈ A }, {Bn ∈ B} и любого на-
чального условия x(0).
Отметим, впрочем, что рассмотрение абсолютной устойчивости для си-
стемы AB не привносит ничего нового по сравнению с рассмотрением си-
стемы A. Очевидно, система AB с нулевым входом f, описываемая урав-
нением (28), асимптотически устойчива в классе всех возмущений A и
управлений B тогда и только тогда, когда система A с нулевым входом f
асимптотически устойчива в классе матриц
A B := {AB : A ∈ A , B ∈ B}.
Из этого замечания и предложения 1 вытекает следующая
Теорема 5. Система AB, описываемая уравнением (28), асимптоти-
чески устойчива в классе всех возмущений A и управлений B тогда и толь-
ко тогда, когда ρ(A B) < 1.
Менее очевиден вопрос о стабилизируемости системы AB. Ограничимся
рассмотрением двух вариантов стабилизируемости.
Определение 5. Скажем, что система AB, описываемая уравнени-
ем (28), потраекторно стабилизируема в классе всех возмущений A объек-
та A с помощью управлений B контроллера B, если для любой последова-
тельности матриц {An ∈ A } (возмущений объекта A ) найдется последо-
вательность матриц {Bn ∈ B} (управлений контроллера B), для которых
при каждом начальном условии x(0) имеет место сходимость (29).
26
Определение 6. Скажем, что система AB, описываемая уравнени-
ем (28), универсально периодически стабилизируема, если найдется та-
кая (универсальная) периодическая последовательность матриц {Bn ∈ B}
(управлений контроллера B), что для каждой последовательности матриц
{An ∈ A } (возмущений объекта A ) и при каждом начальном условии x(0)
имеет место сходимость (29).
Отметим, что по сути вопрос о стабилизируемости системы AB близок
к теоретико-игровым постановкам [87, 88], в которых имеются два игрока —
внешние воздействия и управляющий контроллер, которые поочередно воз-
действуют на систему, причем первый из них стремится сделать систему как
можно более неустойчивой, а второй пытается ее стабилизировать.
Ясно, что универсально периодически стабилизируемые системы являют-
ся потраекторно стабилизируемыми. Кроме того, в обоих определениях ста-
билизируемости системы AB условие, что сходимость (29) имеет место при
каждом начальном условии x(0), равносильно условию
∥AnBn · · · A1B1∥ → 0 при n → ∞.
Замечание 5. Можно было бы ввести поточечные аналоги понятий по-
траекторной и универсальной стабилизируемости, ср., например, [81], но это
не является целью настоящего раздела.
4.3. Минимаксные совместные спектральные радиусы
По аналогии с нижним спектральным радиусом, характеризующим рав-
номерную стабилизируемость неуправляемой системы A, описываемой урав-
нением (26), естественно возникает желание ввести некие числовые величи-
ны для характеризации универсальной и потраекторной стабилизируемости
управляемой системы AB, описываемой уравнением (28). В качестве канди-
датов на такие численные величины предложим соответственно величины
(30)
μ(A , B) = lim
μn(A ,B)n ,
η(A , B) = lim
ηn(A ,B)n ,
n→∞
n→∞
где при каждом n = 1, 2, . . .
μn(A ,B) = max
min
∥AnBn · · · A1B1∥,
Ai∈A
Bi∈B
(31)
ηn(A ,B) = min
max
∥AnBn · · · A1B1∥
Bi∈B
Ai∈A
(здесь ∥ · ∥ — некоторая норма на пространстве матриц размерности N × N).
Так как максимин любой функции не превосходит ее минимакс, то μ(A , B) ≤
≤ η(A ,B), что оправдывает следующее определение.
Определение 7. Пусть {A ,B} — пара множеств матриц размерно-
сти N × M и M × N соответственно. Величину μ(A ,B) будем называть
нижним, а величину η(A ,B) — верхним минимаксным совместным спек-
тральным радиусом пары {A , B}.
27
Существование пределов в (30) вытекает из следующей леммы 2. Напом-
ним, что в линейной алгебре норма ∥ · ∥ в пространстве матриц размерности
N × N называется субмультипликативной, если ∥XY ∥ ≤ ∥X∥∥Y ∥ для лю-
бых матриц X и Y . В частности, матричная норма ∥·∥ субмультипликативна,
если она порождается некоторой векторной нормой, т.е. ее значение ∥A∥ на
∥Ax∥
матрице A определяется равенством ∥A∥ = supx=0
, где ∥x∥ и ∥Ax∥ —
∥x∥
нормы соответствующих векторов в RN .
Лемма 2. Для любых конечных множеств матриц A и B пределы
в (30) существуют и не зависят от нормы ∥ · ∥. Более того, если норма ∥ · ∥
в (31) субмультипликативна, то
μ(A , B) = inf
μn(A ,B)n ,
η(A , B) = inf
ηn(A ,B)n .
n≥0
n≥0
Естественно ожидать, что в общем случае μ(A , B) = η(A , B), что и под-
тверждается следующим примером.
Пример 5. Рассмотрим множества A = {A1,A2} и B = {B1,B2}, где
[
]
[
]
[
]
[
]
1
1
2
0
3
0
0
0
2
3
A1 =
,
A2 =
,
B1 =
,
B2 =
,
1
1
0
0
0
2
0
3
2
3
тогда μ(A , B) = 1 и η(A , B) > 1.
Следующие две теоремы являются основными в настоящем разделе. Они
подтверждают, что минимаксные совместные спектральные радиусы действи-
тельно могут выступать в качестве характеристик стабилизируемости систе-
мы AB.
Теорема 6. Система AB, описываемая уравнением (28), потраектор-
но стабилизируема в классе всех возмущений A и управлений B тогда и
только тогда, когда μ(A , B) < 1.
Теорема 7. Система AB, описываемая уравнением (28), универсально
периодически стабилизируема в классе всех возмущений A и управлений B
тогда и только тогда, когда η(A , B) < 1.
4.4. Другие минимаксные характеристики матричных произведений
Согласно [56] в определении (23) совместного спектрального радиуса ρ(A )
норма матрицы ∥ · ∥ может быть заменена на ее спектральный радиус ρ(·) (с
одновременной заменой предела на верхний предел):
{
}
1
(32)
ρ(A ) = lim
sup ρ(An ··· A1)n : Ai ∈A
;
n→∞
соответствующее утверждение известно как теорема Бергера—Ванга [56].
Аналогично, если в определении (24) заменить норму ∥ · ∥ матрицы на ее
спектральный радиус ρ(·), а предел на нижний предел, то получим другую
формулу для нижнего спектрального радиуса
{
}
1
(33)
ρ(A ) = lim inf ρ(An · · · A1)n : Ai ∈A
n→∞
28
Для конечных множеств A справедливость равенства (33) была установлена
в [33, теорема B1], а позднее для произвольных множеств A аналогичное
утверждение было доказано в [39, лемма 1.12] и [42, теорема 1].
По аналогии с (32) и (33) для совместного и нижнего спектральных ра-
диусов определим следующие минимаксные характеристики матричных про-
изведений:
(34)
μ(A , B) = lim
μn(A ,B)n ,
η(A , B) = lim ηn(A , B)n ,
n→∞
n→∞
(35)
μ(A , B) = lim
μn(A ,B)n ,
η(A , B) = lim ηn(A , B)n ,
n→∞
n→∞
где при каждом n = 1, 2, . . .
μn(A ,B) = max
min
ρ(AnBn · · · A1B1),
Ai∈A
Bi∈B
ηn(A , B) = min
max
ρ(AnBn · · · A1B1).
Bi∈B
Ai∈A
Очевидно, наряду с уже введенными нижним и верхним минимаксными
спектральными радиусами μ(A , B) и η(A , B) величины (34) и (35) также
могли бы претендовать на роль числовых характеристик, характеризующих
стабилизируемость управляемой системы AB, описываемой уравнением (28).
Так как спектральный радиус линейного оператора не превосходит его
нормы, а величины μ(A , B) и η(A , B), как отмечалось в лемме 2, от выбора
нормы не зависят, то
μ(A , B) ≥ μ(A , B) ≥ μ(A , B), η(A , B) ≥ η(A , B) ≥ η(A , B).
А так как максимин любой функции не превосходит ее минимакс, то
μ(A , B) ≤ η(A , B),
μ(A , B) ≤ η(A , B).
Из примера 5 следует, что в общем случае μ(A , B) = η(A , B). А посколь-
ку все матрицы в примере 5 диагональные, то их нормы совпадают с соот-
ветствующими спектральными радиусами. Отсюда следует, что в условиях
примера 5 выполняются также неравенства
μ(A , B) < η(A , B),
μ(A , B) < η(A , B).
В связи с этим возникает вопрос о существовании классов матриц A и B,
для которых выполнялись бы равенства
(36) μ(A , B) = η(A , B) и/или
μ(A , B) = η(A , B), μ(A , B) = η(A , B).
По крайней мере, один класс таких матриц, введенный в [87, 89, 90], описан
в следующей теореме.
Теорема 8. Пусть A ,B — компактные H -множества положитель-
ных матриц размерности N × M и M × N соответственно. Тогда
μ(A , B) = η(A , B) = μ(A , B) = η(A , B) = μ(A , B) = η(A , B).
29
4.5. Вопросы и комментарии
Пусть A — это множество квадратных матриц размерности N ×N, а I :=
:= {I} — одноэлементное множество матриц, состоящее из тождественной
матрицы размерности N × N. Тогда очевидны соотношения
ρ(A ) = μ(A , I ) = η(A , I ) = μ(A , I ) = η(A , I ),
(37)
ρ(A ) = μ(I , A ) = η(I , A ) = μ(I , A ) = η(I , A ).
Замечание 6. Совместный спектральный радиус ρ(·) является в есте-
ственном смысле непрерывной и даже локально липшицевой функцией свое-
го аргумента, см. детали и точные формулировки в [11, 91-93]. В то же время
нижний спектральный радиус ρ(·) в общем случае не является непрерывной
функцией [11, 41, 43]. Но в силу равенств (37) μ(I , A ) = η(I , A ) = ρ(A ), и
поэтому в общем случае ни μ(·, ·), ни η(·, ·) также не являются непрерывными
функциями своих аргументов.
В теории совместного/нижнего спектрального радиуса большую роль иг-
рает теорема Бергера—Ванга [33, 39, 42, 56], дающая возможность выразить
совместный и нижний спектральные радиусы с помощью равенств (32) и (33)
соответственно. В связи с этим возникают следующие вопросы.
Вопрос 1. Имеют ли место равенства
μ(A , B) = μ(A , B), η(A , B) = η(A , B),
(38)
μ(A , B) = μ(A , B), η(A , B) = η(A , B)
(если верны хоть какие-то), т.е. справедливы ли для соответствующих мини-
максных величин аналоги теоремы Бергера—Ванга?
Вопрос 2. Если ответ на вопрос 1 в общем случае отрицателен, то для
каких множеств матриц A и B выполняются все или некоторые из ра-
венств (38)?
Хотя теорема 8 и описывает один из случаев, в котором справедливы ра-
венства (36), тем не менее следующий вопрос остается актуальным.
Вопрос 3. Так как согласно примеру 5 в общем случае
μ(A , B) = η(A , B),
μ(A , B) = η(A , B),
μ(A , B) = η(A , B),
то для каких множеств матриц A и B выполняются все или некоторые из
равенств (36)?
Замечание 7. В теореме
8
вместо множеств A ∈ H (N,M) и
˜
B ∈H (M,N) можно брать множества
A
и
B, удовлетворяющие включени-
ям
(39)
A
A ⊆ co(A ), B ⊆B
⊆ co(B),
где A ∈ H (N, M) и B ∈ H (M, N), а символ co(·) обозначает выпуклую обо-
лочку множества. Справедливость данного замечания вытекает из того фак-
та, что все утверждения, использовавшиеся при доказательстве теоремы 8,
˜
доказаны в [90] именно для множеств
A
и
B, удовлетворяющих включени-
ям (39).
30
Замечание 8. В разделе 4.2 была предпринята попытка объяснить, по-
чему понятие потраекторной стабилизируемости естественно в теории управ-
ления: если имеется последовательность возмущений объекта {An}, то есте-
ственно знать, существует ли последовательность “управлений” {Bn}, кото-
рая стабилизирует матричные произведения AnBn · · · A1B1. Именно эта про-
блема изучалась в настоящем разделе.
В то же время немедленно возникает и другой вопрос: даже в том случае,
когда есть способы стабилизировать матричные произведения AnBn · · · A1B1
за счет выбора подходящих {Bn}, возможно ли на практике определить (при
каждом n) матрицу Bn, используя только информацию о предшествующих
матрицах A1, . . . , An-1? Это действительно практически важный вопрос, ко-
торый однако в настоящем разделе не обсуждается. Дополнительное обсуж-
дение данной тематики см., например, в [81].
СПИСОК ЛИТЕРАТУРЫ
1.
Козякин В.С., Кузнецов Н.А., Чеботарев П.Ю. Консенсус в асинхронных муль-
тиагентных системах. I // АиТ. 2019. № 4. C.3-40.
2.
Козякин В.С., Кузнецов Н.А., Чеботарев П.Ю. Консенсус в асинхронных муль-
тиагентных системах. II // АиТ. 2019. № 5. C. 3-31.
3.
Kozyakin V. An annotated bibliography on convergence of matrix products and the
theory of joint/generalized spectral radius: Preprint. M.: Instit. Inform. Transmiss.
Probl., 2013. December. DOI: 10.13140/RG.2.1.4257.5040/1
4.
Гантмахер Ф.Р. Теория матриц. М.: Наука, 1967.
5.
Хорн Р., Джонсон Ч. Матричный анализ. М.: Мир, 1989.
6.
Козякин В.С. Алгебраическая неразрешимость задачи об абсолютной устойчи-
вости рассинхронизованных систем // АиТ. 1990. № 6. С. 41-47. URL: http://
Kozyakin V.S. Algebraic Unsolvability of Problem of Absolute Stability of
Desynchronized Systems // Autom. Remote Control. 1990. V. 51. No. 6. P. 754-759.
7.
Blondel V.D., Tsitsiklis J.N. When is a Pair of Matrices Mortal? // Inform. Process.
Lett. 1997. V. 63. No. 5. P. 283-286. DOI: 10.1016/S0020-0190(97)00123-3
8.
Tsitsiklis J.N., Blondel V.D. The Lyapunov Exponent and Joint Spectral Radius
of Pairs of Matrices Are Hard — When Not Impossible — to Compute and to
Approximate // Math. Control Signals Syst. 1997. V. 10. No. 1. P. 31-40. DOI:
10.1007/BF01219774
9.
Tsitsiklis J.N., Blondel V.D. Lyapunov Exponents of Pairs of Matrices. A Correction:
“ The Lyapunov Exponent and Joint Spectral Radius of Pairs of Matrices Are Hard —
When Not Impossible — to Compute and to Approximate” // Math. Control Signals
Syst. 1997. V. 10. No. 4. P. 381. DOI: 10.1007/BF01211553
10.
Blondel V.D., Tsitsiklis J.N. The Boundedness of All Products of a Pair of Matrices
Is Undecidable // Syst. Control Lett. 2000. V. 41. No. 2. P. 135-140. DOI: 10.1016/
S0167-6911(00)00049-9
11.
Jungers R. The joint spectral radius. Berlin: Springer-Verlag, 2009. V. 385 of Lecture
Notes Control Inform. Sci. Theory and applications. DOI: 10.1007/978-3-540-95980-9
31
12.
Gripenberg G. Computing the Joint Spectral Radius // Linear Algebra Appl. 1996.
V. 234. P. 43-60. DOI: 10.1016/0024-3795(94)00082-4
13.
Maesumi M. Calculating the spectral radius of a set of matrices / Wavelet analysis
and multiresolution methods (Urbana-Champaign, IL, 1999). N.Y.: Dekker, 2000.
V. 212 of Lecture Notes Pure Appl. Math. P. 255-272.
14.
Blondel V.D., Nesterov Yu. Computationally Efficient Approximations of the Joint
Spectral Radius // SIAM J. Matrix Anal. Appl. 2005. V. 27. No. 1. P. 256-272
(electronic). DOI: 10.1137/040607009
15.
Parrilo P.A., Jadbabaie A. Approximation of the Joint Spectral Radius of a Set of
Matrices Using Sum of Squares / Hybrid systems: computation and control. Berlin:
Springer, 2007. V. 4416 of Lecture Notes Comput. Sci. P. 444-458. DOI: 10.1007/978-
3-540-71493-4_35
16.
Guglielmi N., Zennaro M. An Algorithm for Finding Extremal Polytope Norms of
Matrix Families // Linear Algebra Appl. 2008. V. 428. No. 10. P. 2265-2282. DOI:
10.1016/j.laa.2007.07.009
17.
Kozyakin V. Iterative Building of Barabanov Norms and Computation of the Joint
Spectral Radius for Matrix Sets // Discret. Contin. Dyn. Syst. Ser. B. 2010. V. 14.
No. 1. P. 143-158. DOI: 10.3934/dcdsb.2010.14.143
18.
Chang C.-T., Blondel V. Approximating the Joint Spectral Radius Using a Genetic
Algorithm Framework // Proc. 18 IFAC World Congr. / IFAC. 2011. V. 18. P. 1.
P. 8681-8686.
19.
Kozyakin V. A Relaxation Scheme for Computation of the Joint Spectral Radius of
Matrix Sets // J. Difference Equat. Appl. 2011. V. 17. No. 2. P. 185-201. DOI:
10.1080/10236198.2010.549008
20.
Vankeerberghen G., Hendrickx J., Jungers R. et al. The JSR Toolbox. MATLAB
jsr-toolbox
21.
Cicone A., Protasov V.
Joint spectral radius computation.
MATLAB
Central.
2012.
joint-spectral-radius-computation
22.
Ahmadi A.A., Jungers R.M. Switched Stability of nonlinear systems via SOS-convex
Lyapunov Functions and Semidefinite Programming // Proc. 52. IEEE Ann. Conf.
Decision. Control (CDC). 2013. P. 727-732. DOI: 10.1109/CDC.2013.6759968
23.
Bajovic D., Xavier J., Moura J. M.F., Sinopoli B. Consensus and Products
of Random Stochastic Matrices: Exact Rate for Convergence in Probability //
IEEE Transact. Signal Proc.
2013. V.
61.
No. 10. P. 2557-2571. DOI:
10.1109/TSP.2013.2248003
24.
Chang C.-T., Blondel V.D. An Experimental Study of Approximation Algorithms
for the Joint Spectral Radius // Numer. Algorithms. 2013. V. 64. No. 1. P. 181-202.
DOI: 10.1007/s11075-012-9661-z
25.
Guglielmi N., Protasov V. Exact Computation of Joint Spectral Characteristics of
Linear Operators // Found. Comput. Math. 2013. V. 13. No. 1. P. 37-97. DOI:
10.1007/s10208-012-9121-0
26.
Vankeerberghen G., Hendrickx J., Jungers R.M. JSR: a toolbox to compute the joint
spectral radius // Proc. 17. Int. Conf. Hybrid Syst.: Comput. Control. HSCC’14.
N.Y.: ACM, 2014. P. 151-156. DOI: 10.1145/2562059.2562124
32
27.
Chevalier P.-Y., Hendrickx J.M., Jungers R.M. Efficient Algorithms for the
Consensus Decision Problem // SIAM J. Control Optim.
2015. V. 53. No. 5.
P. 3104-3119. DOI: 10.1137/140988024
28.
Protasov V.Yu. Spectral Simplex Method // Math. Program. 2016. V. 156. No. 1-2,
Ser. A. P. 485-511. DOI: 10.1007/s10107-015-0905-2
29.
Kozyakin V.S. Constructive Stability and Stabilizability of Positive Linear Discrete-
Time Switching Systems // J. Commun. Technol. Electron.
2017. V. 62. No. 6.
P. 686-693. DOI: 10.1134/S1064226917060110
30.
Клепцын А.Ф., Козякин В.С., Красносельский М.А., Кузнецов Н.А. Устойчи-
вость рассинхронизованных систем // Докл. АН СССР.
1984. Т. 274.
№ 5.
С. 1053-1056.
31.
Барабанов Н.Е. О показателе Ляпунова дискретных включений. I-III // АиТ.
1988. № 2. С. 40-46; № 3. C. 24-29; № 5. C. 17-24.
Barabanov N.E. The Lyapunov Indicator of Discrete Inclusions. I-III // Autom.
Remote Control. 1988. V. 49. No. 2. P. 152-157; No. 3. P. 283-287; No. 5. P. 558-565.
32.
Козякин В.С. Об абсолютной устойчивости систем с несинхронно работающими
импульсными элементами // АиТ. 1990. № 10. С. 56-63.
Kozyakin V.S. Absolute Stability of Systems with Asynchronous Sampled-Data
Elements // Autom. Remote Control. 1990. V. 51. No. 10. P. 1349-1355.
33.
Gurvits L. Stability of Discrete Linear Inclusion // Linear Algebra Appl.
1995.
V. 231. P. 47-85. DOI: 10.1016/0024-3795(95)90006-3
34.
Kozyakin V. A Short Introduction to Asynchronous Systems // Proc. Sixth Int.
Conf. Difference Equat. Boca Raton, FL: CRC, 2004. P. 153-165.
35.
Shorten R., Wirth F., Mason O. et al. Stability Criteria for Switched and Hybrid
Systems // SIAM Rev. 2007. V. 49. No. 4. P. 545-592. DOI: 10.1137/05063516X
36.
Lin H., Antsaklis P.J. Stability and Stabilizability of Switched Linear Systems:
A Survey of Recent Results // IEEE Trans. Automat. Control. 2009. V. 54. No. 2.
P. 308-322. DOI: 10.1109/TAC.2008.2012009
37.
Fornasini E., Valcher M.E. Stability and Stabilizability Criteria for Discrete-Time
Positive Switched Systems // IEEE Trans. Automat. Control. 2012. V. 57. No. 5.
P. 1208-1221. DOI: 10.1109/TAC.2011.2173416
38.
Rota G.-C., Strang G. A Note on the Joint Spectral Radius // Nederl. Akad.
Wetensch. Proc. Ser. A 63 = Indag. Math. 1960. V. 22. P. 379-381.
39.
Theys J. Joint spectral radius: theory and approximations: Ph. D. thesis / Faculté
des sciences appliquées, Département d’ingénierie mathématique, Center for Systems
Engineering and Applied Mechanics. Université Catholique de Louvain, 2005. 189 p.
40.
Shen J., Hu J. Stability of Discrete-Time Switched Homogeneous Systems on Cones
and Conewise Homogeneous Inclusions // SIAM J. Control Optim.
2012. V. 50.
No. 4. P. 2216-2253. DOI: 10.1137/110845215
41.
Bochi J., Morris I.D. Continuity Properties of the Lower Spectral Radius // Proc.
Lond. Math. Soc. (3). 2015. V. 110. No. 2. P. 477-509. DOI: 10.1112/plms/pdu058
42.
Czornik A. On the Generalized Spectral Subradius // Linear Algebra Appl.
2005.
V. 407. P. 242-248. DOI: 10.1016/j.laa.2005.05.006
33
43.
Bousch T., Mairesse J. Asymptotic Height Optimization for Topical IFS, Tetris
Heaps, and the Finiteness Conjecture // J. Amer. Math. Soc. 2002. V. 15. No. 1.
P. 77-111 (electronic). DOI: 10.1090/S0894-0347-01-00378-2
44.
Blondel V.D., Theys J., Vladimirov A.A. Switched systems that are periodically
stable may be unstable // Proc. Sympos. MTNS. Notre-Dame, USA: 2002.
45.
Kozyakin V. A Dynamical Systems Construction of a Counterexample to the
Finiteness Conjecture // Proc. 44 IEEE Conf. Decision Control, 2005 and 2005 Eur.
Control Conf. CDC-ECC’05. 2005. P. 2338-2343. DOI: 10.1109/CDC.2005.1582511
46.
Czornik A., Jurgas P. Falseness of the Finiteness Property of the Spectral
Subradius // Int. J. Appl. Math. Comput. Sci. 2007. V. 17. No. 2. P. 173-178. DOI:
10.2478/v10006-007-0016-1
47.
Blondel V.D., Nesterov Yu. Polynomial-time Computation of the Joint Spectral
Radius for Some Sets of Nonnegative Matrices // SIAM J. Matrix Anal. Appl. 2009.
V. 31. No. 3. P. 865-876. DOI: 10.1137/080723764
48.
Duffin R.J. Topology of Series-Parallel Networks // J. Math. Anal. Appl.
1965.
V. 10. P. 303-318. DOI: 10.1016/0022-247X(65)90125-3
49.
Eppstein D. Parallel Recognition of Series-Parallel Graphs // Inform. Comput. 1992.
V. 98. No. 1. P. 41-55. DOI: 10.1016/0890-5401(92)90041-D
50.
Dai X. Robust Periodic Stability Implies Uniform Exponential Stability of Markovian
Jump Linear Systems and Random Linear Ordinary Differential Equations //
J. Franklin Inst. 2014. May. V. 351. No. 5. P. 2910-2937.
DOI: 10.1016/j.jfranklin.2014.01.010
51.
Kozyakin V. The Berger-Wang Formula for the Markovian Joint Spectral Radius //
Linear Algebra Appl. 2014. May. V. 448. P. 315-328. DOI: 10.1016/j.laa.2014.01.022
52.
Kozyakin V. Matrix Products with Constraints on the Sliding Block Relative
Frequencies of Different Factors // Linear Algebra Appl. 2014. September. V. 457.
P. 244-260. DOI: 10.1016/j.laa.2014.05.016
53.
Shih M.-H., Wu J.-W., Pang C.-T. Asymptotic Stability and Generalized Gelfand
Spectral Radius Formula // Linear Algebra Appl. 1997. V. 252. P. 61-70. DOI:
10.1016/0024-3795(95)00592-7
54.
Daubechies I., Lagarias J.C. Sets of Matrices All Infinite Products of Which
Converge // Linear Algebra Appl. 1992. V. 161. P. 227-263.
DOI: 10.1016/0024-3795(92)90012-Y
55.
Daubechies I., Lagarias J.C. Corrigendum/addendum to: “Sets of matrices all infinite
products of which converge” [Linear Algebra Appl. 161 (1992), 227-263; // Linear
Algebra Appl. 2001. V. 327. No. 1-3. P. 69-83. DOI: 10.1016/S0024-3795(00)00314-1
56.
Berger M.A., Wang Y. Bounded Semigroups of Matrices // Linear Algebra Appl.
1992. V. 166. P. 21-27. DOI: 10.1016/0024-3795(92)90267-E
57.
Каток А.Б., Хассельблат Б. Введение в современную теорию динамических
систем. М.: Факториал, 1999.
58.
Kitchens B.P. Symbolic dynamics. Universitext. Berlin: Springer-Verlag, 1998. DOI:
10.1007/978-3-642-58822-8
59.
Fekete M.
Über die Verteilung der Wurzeln bei gewissen algebraischen Gleichungen
mit ganzzahligen Koeffizienten // Math. Z. 1923. Bd. 17. H. 1. S. 228-249. DOI:
10.1007/BF01504345
34
60.
Полиа Г., Сеге Г. Задачи и теоремы из анализа. I. М.: Наука, 1978.
61.
Elsner L. Proc. Workshop “Nonnegat. Matric., Appl. General.” and the Eighth Haifa
Matrix Theory Conf. (Haifa, 1993). 1995. V. 220. P. 151-159. DOI: 10.1016/0024-
3795(93)00320-Y
62.
Bochi J. Inequalities for Numerical Invariants of Sets of Matrices // Linear Algebra
Appl. 2003. V. 368. P. 71-81. DOI: 10.1016/S0024-3795(02)00658-4
63.
Dai X. Extremal and Barabanov Semi-Norms of a Semigroup Generated by a
Bounded Family of Matrices // J. Math. Anal. Appl. 2011. V. 379. No. 2. P. 827-833.
DOI: 10.1016/j.jmaa.2010.12.059
64.
Protasov V. Applications of the joint spectral radius to some problems of functional
analysis, probability and combinatorics // Proc. 44. IEEE Conf. Decision. Control
Eur. Control Conf. 2005, Seville, Spain, December 12-15. 2005. P. 3025-3030.
65.
Jungers R.M., Protasov V., Blondel V.D. Efficient Algorithms for Deciding the Type
of Growth of Products of Integer Matrices // Linear Algebra Appl. 2008. V. 428.
No. 10. P. 2296-2311. DOI: 10.1016/j.laa.2007.08.001
66.
Guglielmi N., Zennaro M. Stability of Linear Problems: Joint Spectral Radius of
Sets of Matrices // Current Challeng. Stabil. Issues Numer. Differ. Equat. Springer,
2014. Lecture Notes. Math. P. 265-313. DOI: 10.1007/978-3-319-01300-8_5
67.
Dai X., Huang Y., Xiao M. Almost Sure Stability of Discrete-Time Switched Linear
Systems: A Topological Point of View // SIAM J. Control Optim.
2008. V. 47.
No. 4. P. 2137-2156. DOI: 10.1137/070699676
68.
Dai X., Huang Y., Xiao M. Periodically Switched Stability Induces Exponential
Stability of Discrete-Time Linear Switched Systems in the Sense of Markovian
Probabilities // Automatica J. IFAC.
2011. V. 47. No. 7. P. 1512-1519. DOI:
10.1016/j.automatica.2011.02.034
69.
MacKay D. J.C. Information theory, inference and learning algorithms. N.Y.:
Cambridge Univer. Press, 2003.
70.
Moision B.E., Orlitsky A., Siegel P.H. Bounds on the Rate of Codes Which Forbid
Specified Difference Sequences // Global Telecom. Conf., 1999. GLOBECOM ’99.
V. 1b. Rio de Janeiro: 1999. P. 878-882.
71.
Moision B.E., Orlitsky A., Siegel P.H. On Codes That Avoid Specified Differences //
IEEE Trans. Inform. Theory. 2001. V. 47. No. 1. P. 433-442. DOI: 10.1109/18.904557
72.
Immink K. A.S. Codes for mass data storage systems. Second edition. Eindhoven,
The Netherlands: Shannon Foundation Publishers, 2004. URL:
73.
Lind D., Marcus B. An introduction to symbolic dynamics and coding. Cambridge:
Cambridge Univer. Press, 1995. DOI: 10.1017/CBO9780511626302
74.
Katok A., Hasselblatt B. Introduction to the modern theory of dynamical systems.
Cambridge: Cambridge Univer. Press, 1995. V. 54 of Encyclop. Math. Appl.
75.
Choi Y., Szpankowski W. Pattern matching in constrained sequences // Pro. IEEE
Int. Sympos. Inform. Theory 2007 (ISIT), Nice, France, June 24-29. 2007. P. 2606-
2610. DOI: 10.1109/ISIT.2007.4557611
35
76.
Ferenczi S., Monteil T. Infinite words with uniform frequencies, and invariant
measures // Combinat., Automat. Number Theory. Cambridge: Cambridge Univ.
Press, 2010. V. 135. Encyclop. Math. Appl. P. 373-409.
77.
Kozyakin V. Minimax Joint Spectral Radius and Stabilizability of Discrete-Time
Linear Switching Control Systems // Discrete Contin. Dyn. Syst. Ser. B.
2018.
V. 22. No. 1531-3492_2017_11_206. P. 20. DOI: 10.3934/dcdsb.2018277
78.
Dai X. A Gel’fand-Type Spectral-Radius Formula and Stability of Linear
Constrained Switching Systems // Linear Algebra Appl.
2012. V. 436. No. 5.
P. 1099-1113. DOI: 10.1016/j.laa.2011.07.029
79.
Jungers R.M. On Asymptotic Properties of Matrix Semigroups with an Invariant
Cone // Linear Algebra Appl.
2012. V. 437. No. 5. P. 1205-1214. DOI:
10.1016/j.laa.2012.04.006
80.
Dai X., Huang Y., Xiao M. Pointwise Stability of Descrete-Time Stationary Matrix-
Valued Markovian Processes // IEEE Trans. Automat. Control. 2015. V. 60. No. 7.
P. 1898-1903. DOI: 10.1109/TAC.2014.2361594
81.
Jungers R.M., Mason P. On Feedback Stabilization of Linear Switched Systems via
Switching Signal Control // SIAM J. Control Optim. 2017. V. 55. No. 2. P. 1179-
1198. DOI: 10.1137/15M1027802
82.
Sun Z., Ge S.S. Switched linear systems: control and design / Communications and
Control Engineering. London: Springer, 2005.
83.
Stanford D.P., Urbano J.M. Some Convergence Properties of Matrix Sets // SIAM
J. Matrix Anal. Appl. 1994. V. 15. No. 4. P. 1132-1140.
DOI: 10.1137/S0895479892228213
84.
Stanford D.P. Stability for a Multi-Rate Sampled-Data System // SIAM J. Control
Optim. 1979. V. 17. No. 3. P. 390-399. DOI: 10.1137/0317029
85.
Dai X., Huang Y., Liu J., Xiao M. The Finite-Step Realizability of the Joint Spectral
Radius of a Pair of d × d Matrices One of Which Being Rank-One // Linear Algebra
Appl. 2012. V. 437. No. 7. P. 1548-1561. DOI: 10.1016/j.laa.2012.04.053
86.
Dai X. Some Criteria for Spectral Finiteness of a Finite Subset of the Real Matrix
Space Rd×d // Linear Algebra Appl. 2013. V. 438. No. 6. P. 2717-2727. DOI:
10.1016/j.laa.2012.09.026
87.
Asarin E., Cervelle J., Degorre A. et al. Entropy games and matrix multiplication
games // 33rd Sympos. Theoret. Aspect. Comput. Sci., (STACS 2016) / Ed. by
N. Ollinger, H. Vollmer. V. 47 of LIPIcs. Leibniz Int. Proc. Inform. Dagstuhl,
Germany: Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik, 2016. P. 11:1-11:14.
DOI: 10.4230/LIPIcs.STACS.2016.11
88.
Bouyer P., Markey N., Randour M. et al. Average-Energy Games // Acta Inform.
2016. Jul. P. 1-37. DOI: 10.1007/s00236-016-0274-1
89.
Козякин В.С. Конструктивная устойчивость и стабилизируемость положитель-
ных линейных переключающихся систем с дискретным временем // Информа-
ционные процессы. 2016. Т. 16. № 2. С. 194-206.
90.
Kozyakin V. Minimax Theorem for the Spectral Radius of the Product of Non-
Negative Matrices // Linear Multilinear Algebra. 2017. V. 65. No. 11. P. 2356-2365.
DOI: 10.1080/03081087.2016.1273877
36
91. Heil C., Strang G. Continuity of the joint spectral radius: application to wavelets /
Linear algebra for signal processing (Minneapolis, MN, 1992). N.Y.: Springer, 1995.
V. 69 of IMA Vol. Math. Appl. P. 51-61.
92. Wirth F. The Generalized Spectral Radius and Extremal Norms // Linear Algebra
Appl. 2002. V. 342. P. 17-40. DOI: 10.1016/S0024-3795(01)00446-3
93. Kozyakin V. An Explicit Lipschitz Constant for the Joint Spectral Radius // Linear
Algebra Appl. 2010. V. 433. No. 1. P. 12-18. DOI: 10.1016/j.laa.2010.01.028
Статья представлена к публикации членом редколлегии А.Л. Фрадковым.
Поступила в редакцию 17.09.2018
После доработки 22.10.2018
Принята к публикации 08.11.2018
37