Автоматика и телемеханика, № 6, 2019
© 2019 г. А.В. ЧЕРНОВ, канд. физ.-мат. наук (chavnn@mail.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского)
О ПРИМЕНЕНИИ ФУНКЦИЙ ГАУССА
ДЛЯ ЧИСЛЕННОГО РЕШЕНИЯ ЗАДАЧ
ОПТИМАЛЬНОГО УПРАВЛЕНИЯ1
Доказываются утверждения о возможности сколь угодно точной ап-
проксимации в пространстве непрерывных функций одного переменного
на любом фиксированном отрезке с помощью линейных комбинаций сдви-
гов и сжатий функции Гаусса. На примере задачи о мягкой посадке на Лу-
ну описывается методика численного решения задач оптимального управ-
ления, основанная на указанном способе аппроксимации управляющей
функции. В рамках этого же примера исследуются вопросы чувствитель-
ности функционалов ограничений к погрешности задания оптимальных
параметров для решения тремя способами: 1) по принципу максимума
Л.С. Понтрягина (численно и теоретически); 2) по методу параметриза-
ции управления в сочетании с методом подвижных узлов; 3) предлагае-
мым методом. Проводится соответствующее сравнение, подтверждающее
эффективность метода 3).
Ключевые слова: техника параметризации управления, сосредоточенная
задача оптимального управления, аппроксимация функциями Гаусса.
DOI: 10.1134/S0005231019060035
1. Введение
Как было отмечено в [1], при дискретизации задач оптимального управ-
ления традиционно используется кусочно-постоянная или кусочно-линейная
аппроксимация управляющей функции, что даже в случае подвижной (управ-
ляемой) сетки приводит к большой размерности аппроксимирующей задачи
математического программирования.
В рамках техники параметризации управления (см. [2-6] и приведенную
в них библиографию) за счет предположения об однозначной разрешимости
управляемой системы для каждого допустимого управления функционалы
задачи сводятся к функциям конечного числа переменных — параметров ин-
терполяции управляющей функции, а исходная бесконечномерная задача оп-
тимизации — к конечномерной (аппроксимирующей задаче). Поскольку спо-
собы интерполяции могут быть разными, в [1] была обозначена проблема вы-
бора такого класса Ω функций, аппроксимирующих неизвестное управление,
который обеспечивал бы качественную аппроксимацию для функций из до-
статочно обширного множества при сравнительно малом количестве парамет-
ров аппроксимации, позволяя кроме того получать близкие к оптимальным
1 Работа поддержана Министерством образования и науки Российской Федерации
в рамках проектной части Государственного задания в сфере научной деятельности
в 2014-2016 гг. (проект № 1727).
51
гладкие и устойчивые режимы управления. Целью работы [1] было показать,
что перечисленным требованиям удовлетворяет класс
{
}
Ω = Φ = Φν[α,β,γ] ∈ C∞[a;b]
(α, β, γ) ∈ R3ν , ν ∈ N
,
[
]
(1)
∑
(x - βj)2
Φν[α,β,γ](x) =
αjϕj[βj,γj](x), ϕj[βj,γj](x) = exp
-
,
ε+γ2
j
j=1
где ε > 0 — некоторое достаточно малое число (нужное только для того, что-
бы избежать нуля в знаменателе). При использовании аппроксимации управ-
ления функциями из класса Ω значения искомого оптимального управления
в контрольных точках тому, кто в данный момент решает соответствующую
задачу оптимизации, неизвестны (и в этом состоит принципиальное отличие
от обычной задачи аппроксимации). В этом случае неизвестные параметры
аппроксимации определяются путем минимизации значения целевого функ-
ционала, вычисляемого на функциях из класса Ω, если они являются допу-
стимыми по смыслу задачи либо на допустимых суперпозициях, содержащих
функции класса Ω (например, в рамках метода синус-параметризации). Ука-
занное принципиальное отличие следует учитывать при сравнении различ-
ных подходов к аппроксимации. В рамках обычной задачи аппроксимации
(при заданном количестве параметров) на первый план выходят вопросы, свя-
занные с минимизацией расхода времени (и прочих ресурсов) при отыскании
неизвестных параметров аппроксимации. В рамках же численного решения
задач оптимального управления главное — это повышение точности аппрок-
симации в отношении произвольной функции (неизвестного управления) в
смысле нормы отклонения в том или ином функциональном пространстве
при заданном количестве параметров аппроксимации, уменьшение этого ко-
личества при сохранении приемлемой точности (по управлению или хотя бы
по функционалу) и т.п.
В [1] были представлены результаты численных экспериментов по аппрок-
симации линейными комбинациями квадратичных экспонент с переменными
параметрами для: 1) многочлена пятой степени; 2) ступенчатой функции;
3) элементарной функции, заданной сложной формулой; 4) четырехзвенной
ломаной. Эти результаты показали достаточно высокую точность такого спо-
соба аппроксимации в смысле максимума модуля отклонения на достаточно
плотной сетке. Кроме того, в [1] доказано несколько утверждений о дискретно
точном характере изучаемых аппроксимаций (в [1] см. библиографию по во-
просу использования квадратичных экспонент для аппроксимации функций
одного переменного на всей числовой оси). Тем не менее строгого теоретиче-
ского обоснования возможности сколь угодно точной аппроксимации указан-
ного вида на любом конечном отрезке в метрике какого-либо функциональ-
ного пространства в [1] не было представлено. Настоящая статья восполняет
этот пробел, а именно: доказывается теорема о возможности сколь угодно
точной аппроксимации в метрике пространства C[a; b] линейной комбинаци-
ей не более n + 1 квадратичных экспонент полиномов n-й степени. В качестве
следствия устанавливается всюду плотное вложение класса Ω в пространства
C[a; b] и Lp[a; b], p ≥ 1.
52
Помимо результатов по аппроксимации функциями Гаусса, в статье на
примере известной задачи о мягкой посадке на Луну описывается методика
применения Ω-аппроксимаций для численного решения методом параметри-
зации управления и представляются результаты соответствующих численных
экспериментов. Устанавливается, что предлагаемый метод решения позволя-
ет существенно снижать размерность аппроксимирующей задачи (по срав-
нению с методом кусочно-постоянной аппроксимации в сочетании с методом
подвижных узлов) и (по крайней мере для указанного примера) в значитель-
ной степени понижает чувствительность численного решения к погрешно-
сти вычислений. Для задачи о мягкой посадке строится теоретический спо-
соб вычисления оптимального момента переключения в рамках решения по
принципу максимума Л.С. Понтрягина и устанавливается жесткость систе-
мы условий мягкой посадки при использовании соответствующего режима
управления. Жесткость системы здесь понимается в смысле единственности
ее решения в пространстве параметров и быстрого роста невязки при малом
отклонении от решения.
2. Формулировка основных результатов
Теорема. Пусть [a;b]⊂R — произвольно фиксированный конечный от-
резок. Тогда любой полином степени n ≥ 0 можно сколь угодно точно в мет-
рике C[a;b] аппроксимировать некоторой функцией вида Φν[α,β,γ] ∈ Ω при
ν ≤ n + 1.
Доказательство теоремы приведено в Приложении.
Замечание 1. Фактически при доказательстве теоремы устанавливает-
ся, что при любой заданной точности для данного полинома Pn(x) при всех
достаточно больших по модулю числах β = 0 и γ > 0 имеет место представ-
ление
∑
Pn(x) ≈ α0 + αjϕβ,γj (x),
(2)
j=1
√
[
]
γj = γ/
j, ϕβ,γ(x) = exp
-(x - β)2/γ2
(здесь, очевидно, ϕβ,γj = ϕjβ,γ ). Отсюда ясно, что по сравнению с n + 1 пара-
метров, необходимых для описания полинома, количество параметров, необ-
ходимых для его разложения по квадратичным экспонентам, больше всего
лишь на два параметра β и γ, которые к тому же могут выбираться беско-
нечным количеством способов. Отметим, что константа α0 может быть сколь
угодно точно аппроксимирована одной квадратичной экспонентой (см. далее
лемму П.1). Но, видимо, лучше включить в класс Ω тождественную еди-
ницу. Кроме того, из анализа доказательства теоремы становится понятно,
что представление в форме (2) — это не единственная возможность. Поэто-
му представление полиномов функциями из класса Ω обладает некоторой
избыточностью. Исходя из этого, можно ожидать, что реально необходимое
количество слагаемых ν может оказаться еще меньше. На эту возможность
53
указывает еще и то, что величины ϕjβ,γ (x) быстро убывают с ростом индек-
са j. Кроме того, при ограничении представления функций полиномами фак-
тически сужаются возможности их представления функциями из класса Ω
на форму (2). Поэтому естественно ожидать, что представление функциями
из класса Ω открывает больше возможностей по сравнению с представлени-
ем полиномами. В принципе, представление функциями из класса Ω имеет
ряд общих черт с представлением так называемыми фреймами [7, § 1.8]. Что
касается избыточности, то для инженерных приложений она бывает полез-
на [7, § 1.8].
Любая функция из C∞[a; b] может быть сколь угодно точно в метрике про-
странства C[a; b] аппроксимирована своим многочленом Тейлора. Более того,
согласно аппроксимационной теореме Вейерштрасса (см., например, [8, гл. IV,
§ 1, теорема 1.3, с. 150]), всякую непрерывную функцию в метрике простран-
ства C[a; b] можно сколь угодно точно приблизить многочленом. Поэтому
справедливо следующее утверждение.
Следствие 1. Класс Ω является всюду плотным в C[a;b].
С другой стороны, всякую функцию из Lp[a; b], p ≥ 1, можно по соответ-
ствующей норме сколь угодно точно аппроксимировать непрерывной функ-
цией (см., например, [9, гл. 4, § 6]). Поэтому имеет место следствие 2.
Следствие 2. Класс Ω является всюду плотным в Lp[a;b], p ≥ 1.
Замечание 2. В качестве следствия теоремы можно п[олучи]ь, что ма-
теринский вейвлет “мексиканская шляпа” ψ(t) = (1-t2) exp
-t2/2
на любом
конечном отрезке может быть сколь угодно точно в метрике C[a; b] аппрок-
симирован функцией вида Φν [α, β, γ] ∈ Ω при ν ≤ 3. Однако в [10] непосред-
ственным образом (т.е. без использования теоремы и ей подобных) доказано
более сильное утверждение о том, что здесь всегда можно считать ν = 2.
Этот факт важен в связи со следующими обстоятельствами. Вейвлеты2 ши-
роко используются при обработке сигналов, в том числе для их аппроксима-
ции и сжатия информации о сигнале, см., например, [7, 11]. Любую функцию
из L2(R) можно при выполнении определенных условий относительно мате-
ринского вейвлета сколь угодно точно в L2(R) аппроксимировать разложени-
ем по системе порожденных им вейвлетов. Причем локально (в частности, на
фиксированном отрезке), как правило, достаточно ограничиться небольшим
количеством членов разложения, за счет присущего им (а также и квадратич-
ным экспонентам) свойства частотно-временной локализации. Материнский
вейвлет “мексиканская шляпа” указанным условиям удовлетворяет (подроб-
нее см. [11, гл. 3]). Отдельные вейвлеты представляют собой сдвиги и сжатия
материнского вейвлета. Сдвиги и сжатия квадратичной экспоненты — это
тоже квадратичные экспоненты. Таким образом, имея разложение данной
функции по системе вейвлетов и зная представление материнского вейвлета
линейной комбинацией квадратичных экспонент, легко получаем разложение
той же функции по квадратичным экспонентам.
2 В последнее время в отечественной литературе вместо слова “вейвлет” активно ис-
пользуется термин “всплеск”, предложенный К.И. Осколковым и более точно отражающий
его смысл.
54
Факт, указанный в замечании 2, подтверждается тем, что при ν = 2 ми-
нимизация квадратичной невязки аппроксимации упомянутого вейвлета на
отрезке [-π; π] дает
α = (50,9715;-49,9715), β = (0,2130;0,2187) · 10-14, γ = (1,4003;-1,4283),
а достигнутая точность аппроксимации на достаточно мелкой сетке: Δ =
= 4,3262 · 10-5. Графики визуально полностью совпадают. Здесь, в частности,
подтверждается гипотеза об избыточности числа ν = n+1 для представления
полиномов n-й степени.
Основываясь на теореме, ее следствиях и замечании 2, а также на ре-
зультатах численных экспериментов, представленных в [1, 10], приходим к
выводу, что использование параметризации управления путем его представ-
ления функцией класса Ω с управляемыми параметрами (α, β, γ) ∈ R3ν поз-
воляет существенно снижать размерность соответствующей аппроксимирую-
щей задачи математического программирования. Фактически, речь идет о
сжатии информации об управлении. Отличие от обычной проблемы сжа-
тия информации заключается в том, что здесь информация, подлежащая
сжатию, тому, кто решает задачу оптимизации, неизвестна, поскольку опти-
мальное управление и требуется найти. Основная идея состоит в том, что
задача об отыскании оптимального управления заменяется задачей об отыс-
кании таких параметров его аппроксимации, которые обеспечивают мини-
мум целевому функционалу при условии выполнения тех или иных ограни-
чений с заданной точностью. На основании изложенного актуальной явля-
ется разработка методик, позволяющих адаптировать популярные алгорит-
мы сжатия информации к неизвестному оптимальному управлению. Отме-
тим в связи с этим публикацию [12], где описывается подобная адаптация
метода JPEG-кодирования по отношению к управляющим функциям двух
переменных.
Далее опишем применение метода параметризации управления с помощью
квадратичных экспонент и проведем сравнение с другими способами пара-
метризации на примере известной задачи о мягкой посадке на Луну. Говоря
о других способах параметризации, будем иметь в виду два подхода. Первый
основан на использовании информации о структуре аналитического решения
этой задачи, полученного с помощью принципа максимума Л.С. Понтрягина.
Второй основан на применении методики, описанной в [2] и опирающейся
на кусочно-постоянную аппроксимацию управления на подвижной (управ-
ляемой) сетке. Оказывается, что в рамках первого подхода система условий
мягкой посадки является жесткой в том смысле, что она имеет единствен-
ное решение в (двумерном) пространстве параметров, причем невязка быстро
возрастает при малом отклонении от решения. Поэтому оптимизация целе-
вого функционала теряет смысл, поскольку производится на одноточечном
множестве. При учете ограничений путем добавления к целевому функцио-
налу штрафа за их нарушение численная оптимизация штрафного функцио-
нала вследствие той же жесткости оказывается неудачной: условия мягкой
посадки грубейшим образом нарушаются при наличии погрешности вычис-
ления момента переключения в оптимальном режиме уже в десятом знаке
после запятой. Для повышения гибкости системы ограничений в простран-
55
стве параметров приходится увеличивать их количество. В частности, второй
подход оказывается успешным лишь при количестве параметров, равном два-
дцати. Наконец, подход, предлагаемый в данной статье, хорошо работает уже
при четырех параметрах.
3. Постановка задачи о посадке на Луну
Рассмотрим управляемую систему из задачи о мягкой посадке на Луну
(здесь h — высота, v — скорость, m — масса, u — расход топлива в единицу
времени):
(3)
h′ = v, v′ = -g + (k/m)u, m′
= -u; h(0) = H, v(0) = V, m(0) = M;
(4)
h[u](T ) = v[u](T ) = 0 (условие мягкой посадки);
m[u](T ) → max (функционал цели).
Ограничение на значения управления: u(t) ∈ [0; σ∗], t ∈ [0; T ]. Будем считать,
что заданы следующие значения параметров: k = 3000, σ∗ = 7,08, g = 1,62,
H = 190000, V = -2650, M = 500. Чтобы обеспечить дифференцируемость
правой части по фазовым переменным, переобозначим переменные: x1 = h,
x2 = v, x3 = 1/m. Здесь исходим из того, что для искомого оптимального
управления масса аппарата m(t) > 0, t ∈ [0; T ] (а с физической точки зрения,
m(t) ≥ M0, где M0 — сухая масса спускаемого аппарата). В итоге задача
переформулируется следующим образом:
{
x′1 = x2, x′2 = -g+kx3u, x′3 = (x3)2u; x1(0) = H, x2(0) = V, x3(0) = 1/M;
(5)
x1[u](T) = x2[u](T) = 0; x3[u](T) → min .
Из аналитического решения задачи минимизации (5) с помощью принципа
максимума Л.С. Понтрягина известна структура оптимального управления:
{
}
u∗(t) =
0, если t ∈ [0; τ]; σ∗, если t ∈ (τ; T ]
Момент переключения τ и финальное время T , вообще говоря, неизвестны.
В соответствии с информацией о структуре оптимального управления
определим набор параметров α = (α1, α2) ∈ R2 и произведем параметриза-
цию:
{
}
τ = α21, T = α21 + α22, u[α](t) =
0, t ∈ [0; τ); σ∗, t ∈ [τ; T ]
В результате функционалы задачи преобразуются в функции двух перемен-
ных:
J0[α] = x3[u](T) → min, Ji[α]
J2i[α] = 0, i = 1,2;
Ji[α] = xi[u](T), i = 1,2,
u = u[α], α ∈ R2. Финальные ограничения будем учитывать с помощью
штрафа:
f (α) = J0[α] + σ1J1[α] + σ2J2[α], α ∈ R2.
56
Решение управляемой задачи Коши из (5) для каждого конкретного управ-
ления будем искать численно методом Эйлера. В итоге исходная задача сво-
дится к задаче безусловной минимизации: f(α) → min, α ∈ R2. Эту задачу ав-
тор решал численно методом Хука-Дживса (написав соответствующий ком-
плекс программ в системе MATLAB). Был получен следующий результат:
α ≈ (6,7;6,7), h(T) = 292,4533, v(T) = 0,015, m(T) = 197,7173. Попытка реше-
ния оказалась неудачной. И это не случайно. Дело в том, что решение управ-
ляемой системы слишком чувствительно к малейшим отклонениям значений
параметров α. Так, например, если взять α = (6,753702689; 6,7), то получаем
финальные значения: h(T ) = -0,0651, v(T ) = -25,1076, m(T ) = 198,7744. Ес-
ли же изменить значение α1 лишь в последнем знаке: α = (6,753702688; 6,7),
то получаем: h(T ) = 274,1060, v(T ) = 233,6999, m(T ) = 182,1186. Стало быть,
коэффициент k обусловленности значения высоты h погрешностью вычисле-
ния параметра α1: |Δh| ≤ k|Δα1| можно оценить как 2 · 1011.
Примечательно, что в [13, гл. III, § 3, п. 3, с. 126] тоже есть, своего рода,
косвенное замечание на эту же тему: “Такое Π-управление на практике да-
ет плохие результаты. Пусть момент включения тормозного двигателя tдв не
совпадает с t1,. . . ” (в статье это τ) “. . . что в действительности всегда име-
ет место. Если tдв < t1, то космический аппарат остановится на некоторой
высоте над Луной, а затем улетит от нее. Если же tдв > t1, то скорость при
посадке не будет нулевой и мягкой посадки не произойдет”. В статье роль
возмущения, порождаемого отличием реального объекта от модели, прини-
мает погрешность вычислений. Поэтому ситуация наблюдается аналогичная.
В разделе 4 приведем строгий анализ, который объясняет, почему так проис-
ходит.
В данном случае увеличение количества степеней свободы управляюще-
го режима (т.е. введение дополнительных параметров в шаблон управления)
позволяет все-таки найти оптимальное управление, переводящее возмущен-
ную (вследствие погрешностей) управляемую систему в требуемое состояние.
А именно разрешим управлению принимать произвольные постоянные зна-
чения v1, v2 ∈ [0; σ∗] на каждом из промежутков [0; τ] и [τ; T ], произведя их
параметризацию следующим образом:
{
}
vi
S(αi+2) = (σ∗/2)
1 + sin(αi+2)
,
αi+2 ∈ R, i = 1,2.
Тогда функционалы задачи обращаются в функции четырех переменных.
Дальше забудем про максимизацию массы остатка топлива и, выбрав в каче-
стве начальных значений уже найденные α1, α2, а также α3, α4 из условий
v1 = 0, v2 = σ∗, минимизируем квадрат нормы невязки выполнения условий
мягкой посадки с помощью метода Хука-Дживса. Тогда за 56 итераций по-
лучаем (с точностью представления до четырех знаков после запятой):
α ≈ (6,7141;6,5941;-1,4807;1,7631),
τ ≈ 45,0789, T ≈ 88,5614,
v1 ≈ 0,0144, v2 ≈ 0,9908 · σ∗;
h(T ) ≈ 6,167 · 10-5, v(T ) ≈ 6,52 · 10-6; m(T ) ≈ 197,6789.
57
В статье [14] описана методика, которая позволяет вычислить градиенты
функционалов по совокупности четырех параметров:
∇αJ0 = (0;0,0024;0,0004;-0,0008),
∇αJ̃1 = (-3,7516;0,0208;0,7707;-0,6725) · 104,
∇αJ̃2 = (-0,0029;0,1383;0,0220;-0,0447) · 104.
Отсюда ясно, что, например, коэффициент k обусловленности значения высо-
ты h погрешностью вычисления параметра α1: |Δh| ≤ k|Δα1| можно оценить
как 3,75 · 104. На самом деле приведенные выше значения h(T ) и v(T ) получа-
ются, лишь если учитывать 16 знаков после запятой. Если же оставить лишь
4 знака, что соответствует погрешности 10-5, то получаем: h(T ) = 0,5786 и
v(T ) = -0,1151. Отсюда приходим к оценке коэффициента обусловленности
примерно того же порядка. Если запретить варьирование параметров v1 и v2,
то ситуация резко ухудшается: h(T ) = 1,1773 · 105 и v(T ) = 5000, а значения
производных по параметрам увеличиваются на порядок.
Отметим, кроме того, следующий интересный факт. Если полученный
оптимальный набор параметров (α3, α4) подвергнуть последовательно пря-
мому и обратному (через арксинус в смысле главного значения) синус-
преобразовани
S(αi), i = 3, 4 (что с математической точки зрения не должно
ничего изменить), то даже при учете всех четырех параметров с 16 знаками
после запятой получим совершенно другой результат: h(T ) = -4,5295 · 104 и
v(T ) = -0,2524 · 104. Такое изменение возникает, видимо, из-за погрешности
вычисления синуса и арксинуса, а также в силу упомянутой выше обуслов-
ленности. Подобное явление, когда математически эквивалентные преобразо-
вания за счет несогласованного влияния погрешностей при наличии высокой
чувствительности к ним приводят к неожиданным результатам, известно спе-
циалистам по вычислительной математике, см., например, [15].
4. Жесткость системы условий мягкой посадки при задании режима
управления двумя параметрами
Далее покажем, что система условий мягкой посадки
(6)
Ji(α1,α2
) = 0, i = 1,2,
при использовании двухпараметрического режима управления, определяе-
мого из принципа максимума, имеет единственное решение, и, более того,
найдем его (с учетом того, что α1 и α2 однозначно восстанавливаются по
значениям τ и T ). Единственность решения означает, что система (6) жестко
определяет набор параметров, а задача максимизации массы остатка топлива
по этим двум параметрам теряет смысл. Другими словами, в рамках данной
парадигмы объект является жестко управляемым в заданную конечную точ-
ку, определяемую условиями мягкой посадки. Именно эта жесткость и вызы-
вает проблемы при численном решении задачи оптимизации по двум пара-
метрам. Ясно, что увеличение количества параметров (т.е. степеней свободы)
58
управления повышает его гибкость, но, как уже было показано на резуль-
татах численных экспериментов, при малом количестве параметров высокая
чувствительность решения к погрешностям сохраняется. Более того, можно
предположить, что для возмущенной (погрешностями) управляемой системы
система ограничений (6) перестает иметь решение (задача имеет признаки
некорректности).
В качестве предварительного результата установим, что момент включе-
ния двигателя τ, обеспечивающий мягкую посадку к некоторому моменту
T > τ, существует не более чем один; далее покажем, что один такой мо-
мент существует, и найдем его. Более того, по каждому моменту переключе-
ния τ определяется лишь один момент времени T = T (τ), при котором высота
h = h(T) = 0 при условии, что v(T) = 0. Малейшее отклонение от оптималь-
ного момента переключения τ∗ ≈ 45 приводит к тому, что величина v(T (τ))
становится либо отрицательной, либо положительной (причем эти измене-
ния происходят достаточно резко), т.е. условие мягкой посадки нарушается.
А это значит, что при данной структуре управления отсутствует устойчивость
существования решения двухточечной краевой задачи (3), (4) и, более того,
соответствующая неустойчивость является сильной (обычная неустойчивость
означает, что в любой окрестности данного управления существуют управле-
ния, которым не отвечает ни одно решение управляемой двухточечной крае-
вой задачи; сильная неустойчивость означает, что при любом отклонении от
данного управления управляемая задача не имеет решения). Прежде всего
найдем решение системы (3) на промежутке [0; τ] (т.е. при u ≡ 0):
m(t) ≡ M, v(t) = V - gt, h(t) = H + V t - (gt2/2), t ∈ [0; τ].
Отсюда, кстати, решая соответствующее квадратное уравнение, нетрудно
найти время свободного падения: Tc ≈ 70. Теперь найдем решение системы
дифференциальных уравнений на промежутке [τ; T ) (т.е. при u ≡ σ∗):
∫t
m′ = -σ∗ ⇒ m(t) = M - σ∗(t - τ); h′ = v ⇒ h(t) = h(τ) + v(ξ)dξ;
τ
(
)
kσ∗
σ∗
v′ = -g +
⇒ v(t) = v(τ) - g(t - τ) - kln
1-
(t - τ)
M-σ∗(t - τ)
M
Вычислим интеграл по частям:
∫
t
[
{
}
]
dv = dξ ⇒ v = -(1/σ∗)
M - σ∗(ξ - τ)
v(ξ) dξ =
=
u = v(ξ) ⇒ du = v′(ξ)dξ
τ
∫
t
[
]
t
v(ξ)
1
kσ∗
=-
{M - σ∗(ξ - τ)}
+
-g +
[M - σ∗(ξ - τ)] dξ =
σ∗
τ
σ∗
M -σ∗(ξ-τ)
τ
1 {
[
]}
=
v(τ)M - v(t)
M - σ∗(t - τ)
+
σ∗
{
}
2
1
(t - τ)
+
-gM(t - τ) + gσ∗
+ kσ∗(t - τ)
σ∗
2
59
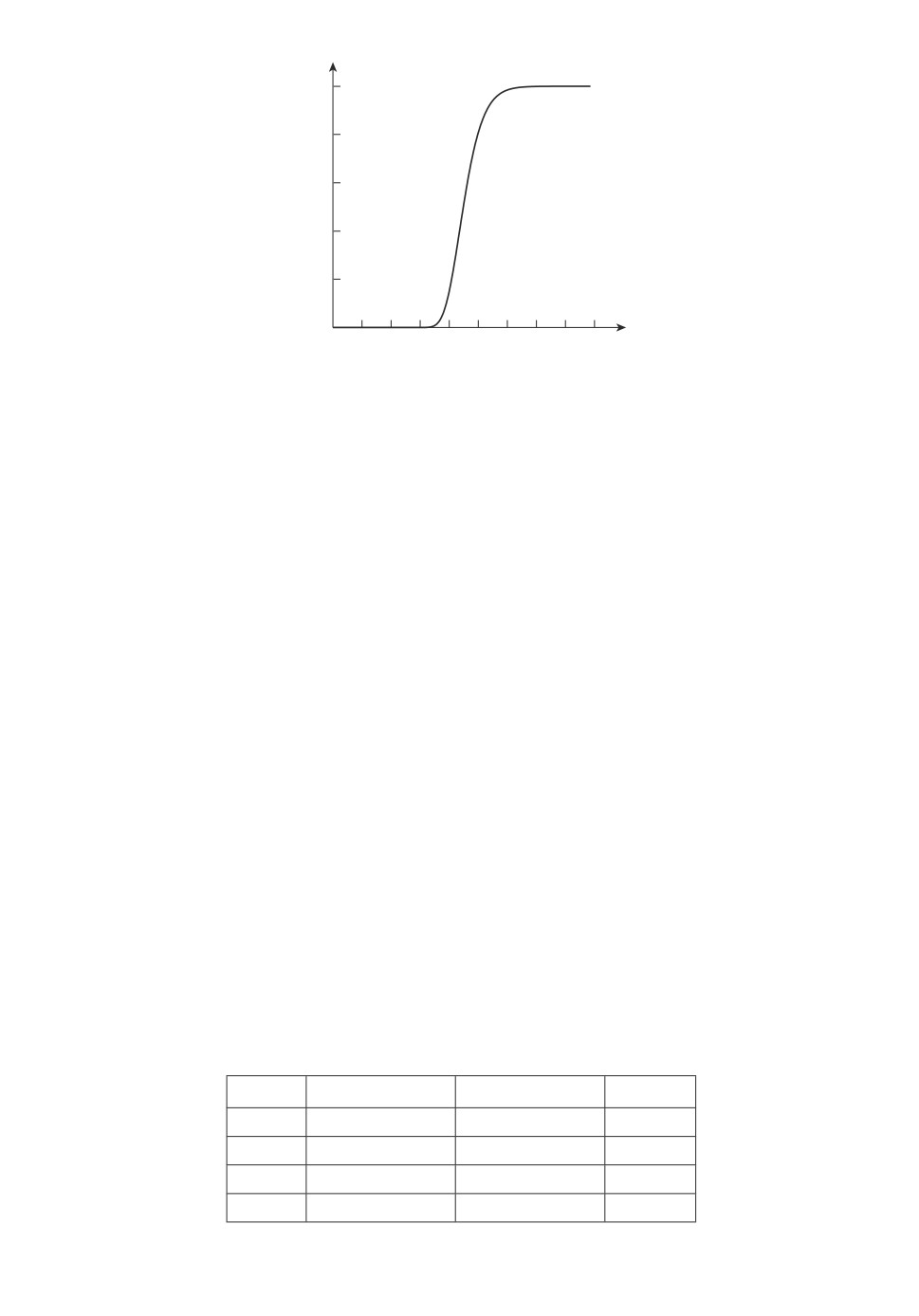
(T( ))
5000
4000
3000
2000
1000
0
1000
35
40
45
50
55
60
65
70
Рис. 1. График функции v = v(T (τ)).
Таким образом, для определения параметров τ и T , обеспечивающих мягкую
посадку, получаем систему: h(T ) = v(T ) = 0, где
{
}
{
}
h(t) = h(τ) + (M/σ∗)
v(τ) - v(t)
+
k - (gM/σ∗)
(t - τ) + (g/2) (t - τ)2,
[
]
v(t) = v(τ) - g(t - τ) - kln
1 - (σ∗/M)(t - τ)
Поскольку должно быть v(T ) = 0, то выражение для высоты несколько упро-
щается:
{
}
h(T ) = h(τ) + (M/σ∗)v(τ) +
k - (gM/σ∗)
(T - τ) + (g/2)(T - τ)2.
Положим: T - τ = ξ > 0, a = g/2, b = k - (gM/σ∗), c = h(τ) + (M/σ∗)v(τ).
Тогда при известном τ момент3 T = T (τ) определяется из решения квадрат-
ного уравнения:
√
-b ±
b2 - 4ac
aξ2 + bξ + c = 0
⇒ ξ=
,
ξ > 0.
2a
Непосредственным вычислением устанавливается, что условие ξ > 0 выпол-
няется, только если в числителе дроби берется знак +. Таким образом, пара-
метр ξ = ξ(τ) (ясно, что τ ∈ [0; 71]) определяется однозначно. По нему опре-
деляется T = T (τ). График функции v = v(T (τ)) см. на рис. 1. Видно, что
эта функция обращается в 0 лишь в одной точке τ = τ∗ ≈ 45. Минимизируя
квадрат v(T (τ))2 по τ методом золотого сечения на отрезке [45; 46], за 48 ите-
раций получаем практически точное значение момента переключения для
точной (невозмущенной) системы:
τ = 45,621808458300308, T = T(τ) = 88,409233510388248,
3 Это не есть момент соприкосновения с поверхностью Луны космического аппарата
при произвольном τ, поскольку в выражении h(T) в целях его упрощения было приня-
то v(T ) = 0, что заведомо верно при выполнении условий мягкой посадки в момент вре-
мени T , но в противном случае является, вообще говоря, искажением этого выражения.
Однако величина T = T(τ), определяемая из соответствующего условия h(T) = 0, доста-
точно информативна, так как в случае v(T ) = 0 мягкой посадки в момент T не будет.
60
h(T ) = 0, v(T ) ≈ 2,5389 · 10-9, m(T ) ≈ 197,06. Разумеется, погрешности чис-
ленного решения управляемой системы могут привести к отклонениям от
этих оптимальных значений как в ту, так и в другую сторону. В частно-
сти, в разделе 3 m(T ) ≈ 197,68, т.е. относительная погрешность составляет
0,62/197 ≈ 0,003. По графику также видно, что значения v(T (τ)) в окрест-
ности оптимальной точки переключения меняются очень быстро. Учиты-
вая что при τ ∈ [35; 55] график почти прямолинеен, можно получить оцен-
ку коэффициента обусловленности v(T (τ)), оценив угловой коэффициент:
k ≈ 2000/20 = 100. Но подчеркнем еще раз, что v(T(τ)) это не есть скорость
в момент посадки, поскольку T (τ) было получено из условия равенства нулю
выражения для h(T ), в котором было принято v(T ) = 0. Поэтому величи-
на v(T (τ)) является скоростью в момент посадки, только когда она равна ну-
лю. Обусловленность скорости в момент посадки будет гораздо выше. Именно
это и порождает высокую обусловленность функционало
Ji, i = 1, 2.
В дополнение к изложенному, ясно, что всегда существует погрешность
математической модели как таковой. Поэтому с прикладной и численной то-
чек зрения интересно было бы найти такой способ параметризации управле-
ния, который позволил бы сохранять гибкость системы вида (6) даже при
малом количестве параметров, обеспечивая тем самым хорошее (приемле-
мое) приближение к точному решению по функционалу и в смысле выполне-
ния ограничений, нечувствительное к погрешностям вычисления параметров
параметризованного управления (т.е. слабо обусловленное погрешностями).
В разделе 5 будут представлены некоторые способы параметризации управле-
ния, которые по итогам численных экспериментов демонстрируют указанные
свойства.
Слово “гибкость” будем понимать в том смысле, что для произвольной
точки α из множества решений S системы ограничений
Ji(α1,... ,αν) = 0,
i = 1,2, в пространстве параметров Rν существует достаточное количество
путей перемещения из этой точки, не выводящих из S. А это позволяет осу-
ществлять последовательное перемещение вдоль S в сторону уменьшения
значения минимизируемого функционала. В частности, если S оказывается
гладким многообразием размерности больше единицы, то рассматриваемую
систему можно, видимо, считать достаточно гибкой.
5. Понижение обусловленности ограничений при
численном решении задачи о посадке на Луну
Сравним следующие способы параметризации управления.
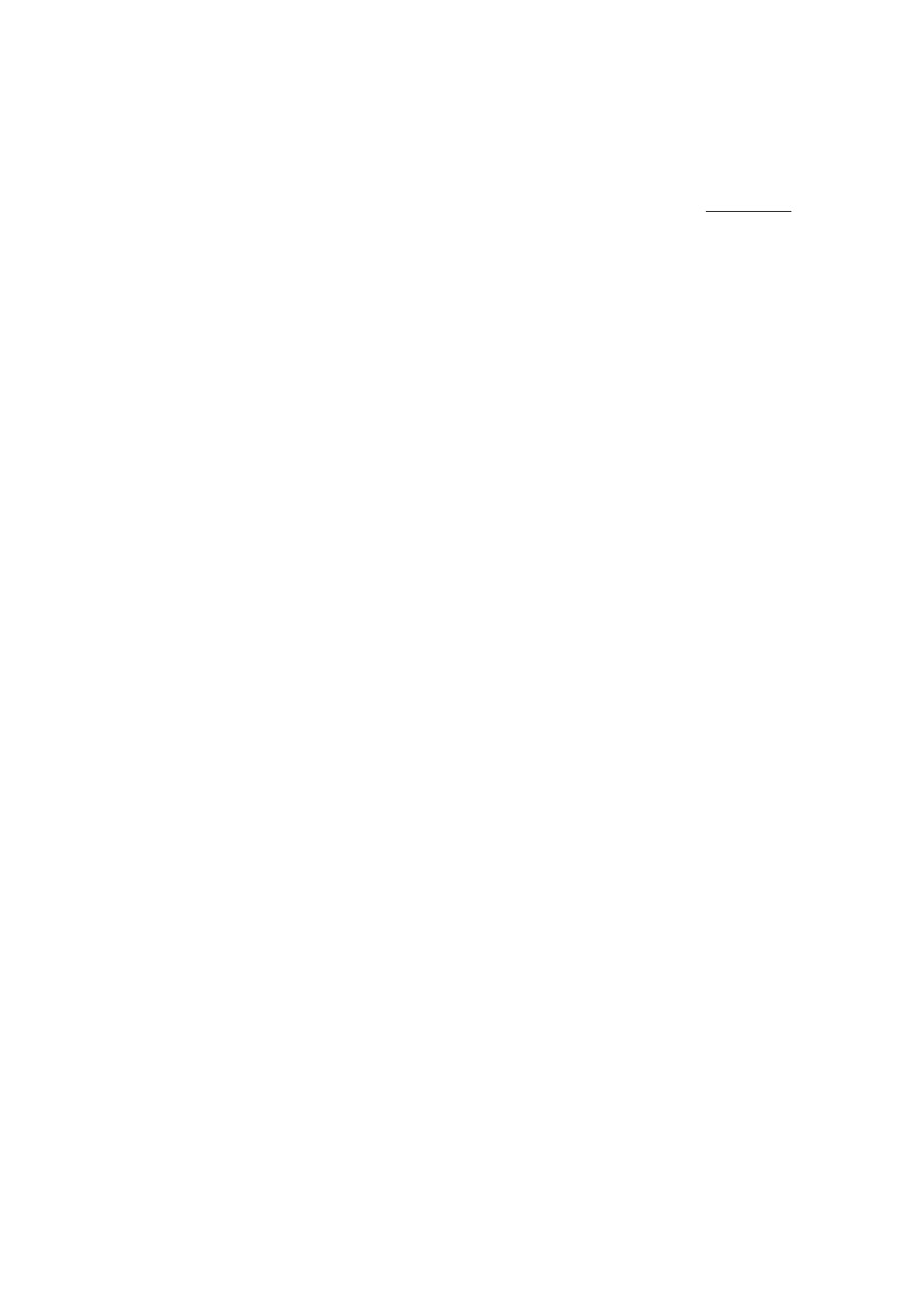
1. Кусочно-постоянная параметризация на подвижной сетке. Использу-
ем методику численного решения задач оптимального управления со сво-
бодным временем, описанную в [2]. Этот способ, вообще говоря, никак не
использует информацию о структуре точного аналитического решения оп-
тимизационной задачи. По крайней мере в том смысле, что количество уз-
лов сетки берется существенно больше трех (как следовало бы брать в со-
ответствии с указанной информацией). Отметим, что автор пытался брать и
меньшее число узлов (ближе к трем), но это не давало достаточно хороше-
го результата — видимо, чувствительность численного решения управляемой
61
u
7,03
5,62
4,22
2,82
1,41
0,01
0
10
20
30
40
50
60
70
80
90
t
Рис. 2. Метод подвижных узлов.
системы к изменению параметров параметризованного управления остава-
лась все еще высокой. При увеличении количества узлов наблюдается сниже-
ние чувствительности вплоть до приемлемого уровня. Итак, будем использо-
вать набор параметров, состоящий из двух поднаборов α = (α1, . . . , αk) ∈ Rk
и β = (β1,...,βk) ∈ Rk. Параметризацию управления будем производить по
правилу:
∑
σ∗
u(t) =
(1 + sin βi), t ∈ [ti-1; ti), t0 = 0, ti =
α2j, i = 1,k, T = tk.
2
j=1
Для k = 10 были получены следующие результаты:
h(T ) = -2,1136 · 10-5, v(T ) = -0,0001, m(T ) = 197,6182, T = 88,9913
(см. рис. 2).
Таким образом, для успешного численного решения понадобилось исполь-
зовать 20 параметров.
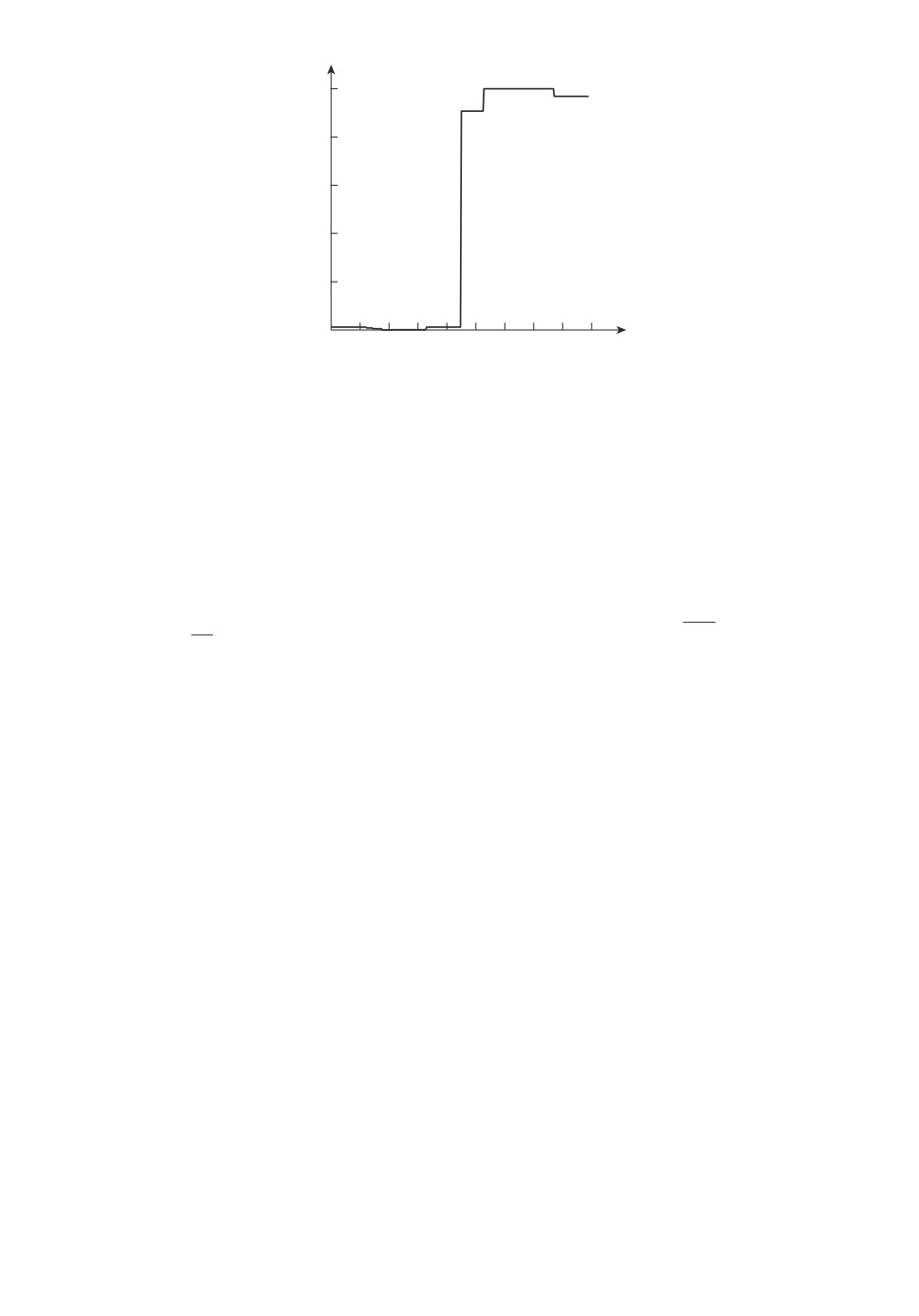
2. Использование суперпозиции функций Гаусса. Для того чтобы удовле-
творить ограничению на значения управления, автор использовал парамет-
ризацию вида
{
}
u(t) = σ∗ exp -Φ2(t) ,
Φ = Φν[α,β,γ], α,β,γ ∈ Rν.
В качестве базового набора параметров выступает
(T, α, β, γ) ∈ R × Rν × Rν × Rν .
В итоге при ν = 1 было получено приближенное решение:
T = 88,6066592856881950, α = 12,9396289585961490,
β = -5,5699194307950597, γ = 30,4427790686622010,
h(T ) = -7,4873 · 10-12, v(T ) = -9,3436 · 10-13, m(T ) = 197,6594
62
u
7,08
5,67
4,25
2,83
1,41
0
10
20
30
40
50
60
70
80
90
t
Рис. 3. Метод квадратичных экспонент.
При ν = 2 и ν = 3 результат получается примерно такой же.
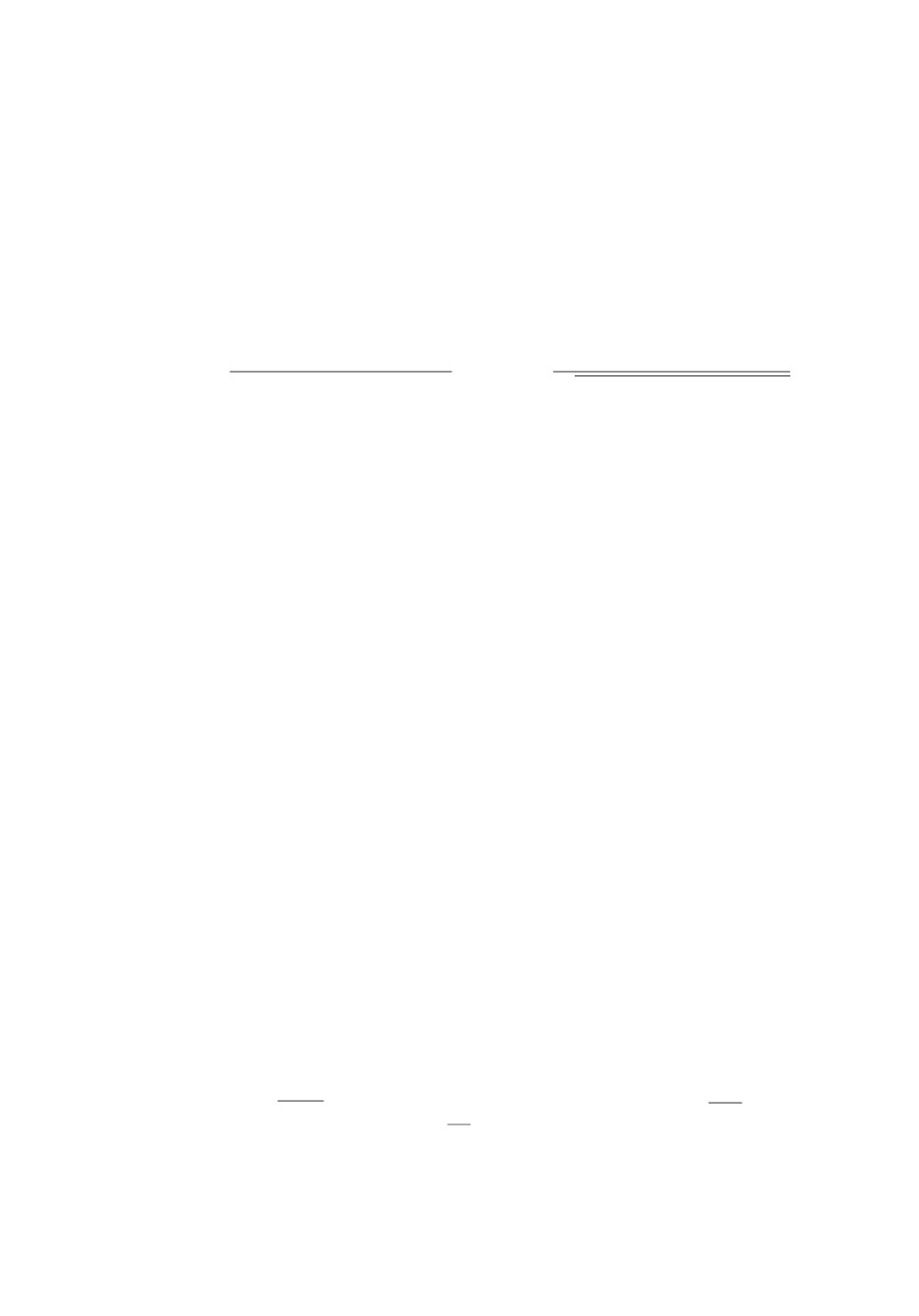
В порядке исследования чувствительности рассмотрим таблицу. Здесь
представлена зависимость выходных параметров от количества значащих
цифр после запятой (запись e-005 означает умножение на 10-5). Видим, что
некоторая чувствительность выходных данных к точности задания управ-
ляемых параметров еще наблюдается, но она уже далеко не столь критич-
на, как при аналитически оптимальном управлении. Из таблицы можно оце-
нить коэффициенты обусловленности. Например, для высоты k ≈ 9 · 103, т.е.
по сравнению с двухпараметрическим режимом управления, полученным из
принципа максимума, обусловленность понижается примерно в 2 · 107 раз, а
по сравнению с методом подвижных узлов при четырех параметрах в рам-
ках решения задачи
Ji(α1,... ,α4) = 0, i = 1,2, — примерно в 5-6 раз (см.
раздел 3). Численные эксперименты позволяют сделать следующие выводы.
1. Подобно обычному методу параметризации управления, предлагаемый
в статье подход достаточно прост и позволяет разделить исходную задачу на
подзадачи (в частности, конечномерной оптимизации и решения управляемой
задачи Коши), для каждой из которых можно использовать как собственные
разработки, так и готовые программы, выбирая те, что наиболее эффектив-
ны или наиболее просты и доступны. При этом по сравнению с обычным
методом параметризации предлагаемый подход позволяет без существенных
потерь в смысле близости к оптимуму сокращать количество управляемых
параметров в разы (в частности, для задачи о мягкой посадке на Луну — в
пять раз (при ν = 1) по сравнению с методом кусочно-постоянной аппрокси-
Анализ чувствительности
Знаков
h(T )
v(T )
m(T )
4
-0,093413
0,00065807
197,6593
8
-1,122e - 005
2,3315e - 008
197,6594
12
9,2098e - 010
1,423e - 011
197,6594
16
-7,4873e - 012
-9,3436e - 013
197,6594
63
мации в сочетании с методом подвижных узлов при количестве параметров,
необходимом для обеспечения устойчивого численного решения).
2. Использование внешней параметризации (в частности, с помощью функ-
ции Гаусса) позволяет учитывать ограничения на значения управления, не
требуя включения их в число ограничений аппроксимирующей задачи, и в
сочетании с предлагаемым подходом оказывается работоспособным и эффек-
тивным.
3. Предлагаемый подход позволяет получать хорошее приближение (по
крайней мере, по значению функционала) к решению оптимизационной за-
дачи даже при достаточно малом количестве параметров аппроксимации.
4. Предлагаемый подход хорошо работает и в том случае, когда начальное
управление находится достаточно далеко от оптимального, причем для реше-
ния аппроксимирующей задачи используется метод Хука-Дживса (нулевого
порядка) в сочетании с методом штрафа в весьма простой и грубой форме, а
для решения управляемой системы при текущем управлении — простейший
метод Эйлера.
5. Значение целевого функционала и ограничения задачи оптимизации
оказываются мало чувствительными к малым изменениям полученного в ре-
зультате численного решения набора параметров аппроксимации.
6. Заключение
Поясним связь между установленной в начале статьи возможностью сколь
угодно точной аппроксимации функций одного переменного на любом фик-
сированном отрезке функциями класса Ω и особенностями использования
соответствующего способа аппроксимации управляющей функции при чис-
ленном решении задач оптимального управления со свободным временем на
примере задачи о мягкой посадке на Луну. На первый взгляд, может пока-
заться, что возможность сколь угодно точной аппроксимации не требуется,
поскольку чем ближе подходим к точному оптимальному управлению, тем
труднее будет происходить процесс численного решения. При детальном же
рассмотрении (см. разделы 3 и 4) оказалось, что причиной затруднений явля-
ется жесткость системы ограничений, которая наблюдается именно при двух
параметрах, а при увеличении их количества — снимается; в то же время
увеличение количества параметров как раз и повышает точность аппрокси-
мации. Вообще, какова бы ни была задача, всегда приходится стремиться
прийти к некому балансу между следующими двумя требованиями, проти-
воречащими друг другу. С одной стороны, размерность аппроксимирующей
задачи математического программирования должна быть не слишком вы-
сокой, чтобы ее не слишком сложно было решать. С другой стороны, ко-
личество ν используемых параметров должно быть достаточным для того,
чтобы система ограничений была достаточно гибкой в смысле ее разрешимо-
сти, и при этом наилучшее значение функционала на множестве аппрокси-
маций управления (за счет соответствующего расширения этого множества)
не слишком сильно отличалось бы от его наилучшего значения на множестве
допустимых управлений в исходной задаче. Использование функций Гаусса
позволяет удачным образом достигать компромисса между этими двумя тре-
64
бованиями. С одной стороны, как уже было сказано в разделе 1, такой способ
аппроксимации обеспечивает во многих случаях хорошую точность прибли-
жения при малом количестве параметров. С другой стороны, в силу того
же обстоятельства наилучшее значение функционала в аппроксимирующей
задаче не слишком сильно отличается от теоретически оптимального. При
этом гибкость системы ограничений, в данном случае систем
Ji(α,β,γ) = 0,
i = 1,2, обеспечивается за счет следующих обстоятельств. Во-первых, мно-
жество решений указанной системы (учитывая, что количество параметров
больше двух) оказывается гладким многообразием за счет гладкости левых
частей при их независимости. Дело в том, что функционалы аппроксимирую-
щей задачи при достаточной гладкости правой части системы и интегрантов
функционалов оказываются тоже гладкими (технику доказательства этого
факта можно вычленить из рассуждений [3, 4]) за счет того, что аппрокси-
мации зависят бесконечно дифференцируемым образом от параметров. Во-
вторых, возмущенная (за счет погрешностей) управляемая система, скорее
всего, имеет (см. рис. 2) оптимальный режим u ∈ L∞[0; T ] не совсем такой
формы графика, как следует из принципа максимума, но это не мешает тому,
что найдется управление u, представимое с помощью функций из Ω, аппрок-
симирующее u сколь угодно точно в норме Lp[0; T ], p ∈ [1; ∞), а на участках
непрерывности — в норме C. А уже в рамках данного способа аппроксимации
(при заданном количестве параметров) соответствующая конечномерная ап-
проксимирующая задача оказывается, как уже сказано, достаточно гладкой,
вследствие чего сравнительно легко решается.
ПРИЛОЖЕНИЕ
Доказательство теоремы основано на следующих леммах.
Лемма П.1. Для любых [a;b] ⊂ R, ε > 0, а также для β ∈ R и γ > 0 та-
ких, что
{
}
√
(Π.1)
|β| + max(|a|, |b|)
/γ <
min(ε,1),
[
]
справедлива оценка: max
exp
-(x - β)2/γ2
-1 < ε.
x∈[a;b]
Доказательство. Раскладывая в ряд Маклорена, получаем:
∑
(-1)nt2n
e-t2 - 1 =
∀t ∈ R.
n!
n=1
Для каждого фиксированного t ∈ [-1; 1] справа стоит знакочередующий-
ся ряд с модулем общего члена, строго убывающим до нуля, т.е. ряд ти-
па Лейбница. Как известно, модуль суммы такого ряда (так же, как его
остатка) оценивается модулем своего первого члена. Тогда
e-t2 - 1≤t2 при
все{t ∈ [-1;}]. Поэтому чтобы получить нужную оценку, достаточно, что-
бы
(x - β)2
/γ2 < min(ε, 1). Выполнение этого неравенства обеспечивается
условием (Π.1). Лемма П.1 доказана.
65
Лемма П.2. Для любых [a;b] ⊂ R, a < b, C = 0 и ε > 0 найдутся пара-
метры α,β,d ∈ R и γ > 0 такие, что
Cx = αϕβ,γ(x) + d + σ(x),
где
[
]
max
σ(x)<ε,ϕβ,γ(x) = exp
-(x - β)2/γ2
x∈[a;b]
В качестве β = 0 и γ > 0 можно взять любые числа, удовлетворяющие нера-
венствам
2|C| max(|a|, |b|)(b - a)
|β| + max(|a|, |b|)}
(Π.2)
|β| >
и γ>
√
[
]
ε
min(ε/
2|C|(b - a)
, 1)
Доказательство. Предварительно, считая параметры β ∈ R, β = 0 и
γ > 0 произвольными, положим α = Cγ2/(2β) и оценим разность
[
]
=|α|
≤
σ1(x) =
αϕ′β,γ (x) - C
-2 exp
-(x - β)2/γ2
(x - β)γ-2 - (C/α)
(
)
=|C|
≤ |2α| |x/γ2| + |C|ϕβ,γ(x) - 1
|x/β| +
ϕβ,γ(x) - 1
Обозначим ε1 = ε/(b - a) и выберем β = 0 из условия |C| max(|a|, |b|)/|β| <
< ε1/2. После этого выберем число γ > 0 из условия (Π.1) при замене ε на
ε1/(2|C|). Тогда получим σ1(x) < ε1 для всех x ∈ [a;b]. Рассмотрим интеграл
x
∫
{
αϕβ,γ (t) - Ct}′ dt = αϕβ,γ (x) + d - Cx ≡ -σ(x), x ∈ [a; b],
a
где d = Ca - αϕβ,γ (a). Таким образом, получаем
∫
b
σ(x)≤σ1(t)dt < ε1 (b - a) = ε
∀x ∈ [a;b].
a
Лемма П.2 доказана.
Доказательство теоремы. Рассмотрим на отрезке [a;b], a < b, про-
извольный полином степени n:
Pn(x) = K0 + K1x + ... + Knxn.
Если n = 0, то д√аточно просто сослаться на лемму П.1. Будем считать,
что n ≥ 1, Cm =m
|Km|, C = 1 + max Cm, sm = sign Km, m = 1, n. Тогда
m=1,n
∑
Pn(x) = K0 +
sm(Cmx)m.
m=1
66
Зафиксируем произвольно число ε1 ∈ (0; 1) и найдем числа β = 0 и γ > 0 из
условий (Π.2) при замене ε на ε1. Согласно лемме П.2 найдутся числа dm и
αm ∈ R, m = 1,n, такие, что
∑
(
)m
Pn(x) = K0 +
sm
αmϕβ,γ(x) + dm + σm(x)
,
m=1
<ε1
σm(x)
∀x ∈ [a;b],
m = 1,n. Пользуясь формулой бинома Ньютона, получаем, что
(
)m
(
)m
αmϕβ,γ(x) + dm + σm(x)
=
αmϕβ,γ(x) + dm
+ δm(x),
∑
(
δm(x) =
Ckm
αmϕβ,γ(x) + dm
)m-kσkm(x).
k=1
Заметим, что |σm(x)| < ε1 < 1, и, таким образом,
∑
∑
(
)m-k
≤ε1
m-k
δm(x)
CkmCmx - σm(x)
≤ε1
Ckm
C|x| + 1
≤
k=1
k=1
∑
(
)m-k
(
)m
(
)n
≤ε1Cm Ckm
|x| + 1
≤ε1Cm
|x| + 2
≤ε1Cn
|x| + 2
k=1
Пользуясь теперь произволом в выборе ε1, потребуем, чтобы выполнялось
условие
(
)n
ε1Cn
max(|a|, |b|) + 2
< ε/(2n).
∑
Тогда для величины δ(x) =
smδm(x) получим:
δ(x)< ε/2
для всех
m=1
x ∈ [a;b]. При этом по построению
∑
(
)m
Pn(x) = K0 +
sm
αmϕβ,γ(x) + dm
+ δ(x), x ∈ [a;b].
m=1
Опять же по формуле бинома Ньютона
(
)
∑
αmϕβ,γ(x) + dm
m = Ckmαm-kmdkmϕm-kβ,γ(x).
k=0
Значит, каждое слагаемое не содержит, по сути, ничего, кроме степеней функ-
ции ϕβ,γ (x), максимально возможной из которых является n-я степень, до-
множенных на некоторые константы. Отсюда вытекает представление поли-
нома в виде
∑
Pn(x) = K0 + fjϕjβ,γ(x) + δ(x) =
j=0
∑
= C0 + fjϕjβ,γ(x) + δ(x), C0 = K0 + f0.
j=1
67
Заметим, что ϕjβ,γ(x) = ϕβ,γ
(x), γj = γ/√j. Пользуясь, наконец, леммой П.1,
j
∑
получаем представление Pn(x) = ϕβ0,γ0 (x) + fjϕβ,γj (x) + σ(x) при некото-
j=1
<εдлявсехx∈[a;b].Теоремадоказана.
рых β0 ∈ R, γ0 > 0 и
σ(x)
СПИСОК ЛИТЕРАТУРЫ
1.
Чернов А.В. Об использовании квадратичных экспонент с варьируемыми пара-
метрами для аппроксимации функций одного переменного на конечном отрез-
ке // Вестн. Удмурт. ун-та. Математика. Механика. Компьютерные науки. 2017.
Т. 27. Вып. 2. С. 267-282.
2.
Чернов А.В. О приближенном решении задач оптимального управления со сво-
бодным временем // Вестн. Нижегород. гос. ун-та им. Н.И. Лобачевского. 2012.
№ 6(1). С. 107-114.
3.
Чернов А.В. О гладких конечномерных аппроксимациях распределенных опти-
мизационных задач с помощью дискретизации управления // Журн. вычисл.
матем. и матем. физ. 2013. Т. 53. № 12. С. 2029-2043.
Chernov A.V. Smooth Finite-Dimensional Approximations of Distributed
Optimization Problems via Control Discretization
// Comput. Math. Math.
Phys. 2013. V. 53. No. 12. P. 1839-1852.
4.
Чернов А.В. О применимости техники параметризации управления к решению
распределенных задач оптимизации // Вестн. Удмурт. ун-та. Математика. Ме-
ханика. Компьют. науки. 2014. Т. 24. Вып. 1. С. 102-117.
5.
Чернов А.В. О гладкости аппроксимированной задачи оптимизации системы
Гурса-Дарбу на варьируемой области // Тр. ИММ УрО РАН. 2014. Т. 20. № 1.
С. 305-321.
6.
Чернов А.В. О кусочно постоянной аппроксимации в распределенных задачах
оптимизации // Тр. ИММ УрО РАН. 2015. Т. 21. № 1. С. 264-279.
7.
Новиков И.Я., Протасов В.Ю., Скопина М.А. Теория всплесков. М.: Физматлит,
2006.
8.
Гаевский Х., Грегер К., Захариас К. Нелинейные операторные уравнения и опе-
раторные дифференциальные уравнения. М.: Мир, 1978.
Gajewski H., Gröger K., Zacharias K. Nichtlineare Operatorgleichungen und Ope-
ratordifferentialgleichungen. Berlin: Akademie, 1974.
9.
Федоров В.М. Курс функционального анализа. СПб.: Лань, 2005.
10.
Чернов А.В. О применении квадратичных экспонент для дискретизации за-
дач оптимального управления // Вестн. Удмурт. ун-та. Математика. Механика.
Компьют. науки. 2017. Т. 27. Вып. 4. С. 558-575.
11.
Добеши И. Десять лекций по вейвлетам. Ижевск: НИЦ РХД, 2001.
Daubechies I. Ten lectures on wavelets. Philadelphia: Society for Industrial and Appl.
Math., 1992.
12.
Чернов А.В. JPEG-подобный метод параметризации управления для численного
решения распределенных задач оптимизации // АиТ. 2017. № 8. С. 145-163.
Chernov A.V. JPEG-Like Method of Control Parametrization for Numerical Solution
of the Distributed Optimization Problems // Autom. Remote Control. 2017. V. 78.
No. 8. P. 1474-1488.
13.
Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория кон-
струирования систем управления. М.: Высш. шк., 2003.
68
14. Чернов А.В. О дифференцировании функционалов аппроксимирующих задач в
рамках метода подвижных узлов при решении задач оптимального управления
со свободным временем // Вестн. Тамбов. ун-та. Сер. Естеств. и техн. науки.
2018. Т. 23. № 124. С. 861-876.
15. Петров Ю.П., Петров Л.Ю. Неожиданное в математике и его связь с авариями
и катастрофами. СПб.: БХВ-Петербург, 2005.
Статья представлена к публикации членом редколлегии В.И. Васильевым.
Поступила в редакцию 28.08.2017
После доработки 07.12.2018
Принята к публикации 07.02.2019
69