Автоматика и телемеханика, № 7, 2019
Стохастические системы
© 2019 г. А.В. БОСОВ, д-р техн. наук (abosov@frccsc.ru),
(Институт проблем информатики Федерального исследовательского
центра “Информатика и управление” РАН, Москва;
Московский авиационный институт),
Г.Б. МИЛЛЕР, канд. физ.-мат. наук (gmiller@frccsc.ru)
(Институт проблем информатики Федерального исследовательского
центра “Информатика и управление” РАН, Москва)
УСЛОВНО-МИНИМАКСНЫЙ НЕЛИНЕЙНЫЙ ФИЛЬТР
И СИГМА-ТОЧЕЧНЫЕ ФИЛЬТРЫ:
ПРАКТИЧЕСКИЙ АНАЛИЗ И СРАВНЕНИЕ1
Представлены результаты анализа и сравнения свойств двух концеп-
ций в задачах фильтрации состояний нелинейных стохастических дина-
мических систем наблюдения с дискретным временем — сигма-точечного
фильтра Калмана, основанного на дискретной аппроксимации непрерыв-
ных распределений, и условно-минимаксного нелинейного фильтра, реа-
лизующего метод условно-оптимальной фильтрации на основе имитаци-
онного моделирования. Краткое обсуждение структуры и свойств оценок
и обоснований соответствующих алгоритмов сопровождается значитель-
ным объемом модельных примеров, иллюстрирующих как положитель-
ные варианты применения, так и ограничения работоспособности проце-
дур оценивания. Простота и наглядность рассмотренных примеров (ска-
лярные автономные регрессии в уравнении состояния и линейные наблю-
дения) позволяют объективно охарактеризовать рассматриваемые мето-
дики оценивания. Предлагается новая модификация нелинейного филь-
тра, сочетающая идеи обоих рассмотренных направлений.
Ключевые слова: нелинейная стохастическая система наблюдения, сигма-
точечное преобразование, сигма-точечный фильтр, условно-оптимальная
фильтрация, условно-минимаксный нелинейный фильтр, имитационное
моделирование.
DOI: 10.1134/S000523101907002X
1. Введение
Стохастическая фильтрация, оценивание состояний и идентификация па-
раметров динамических систем наблюдения — важные и для множества при-
ложений, и для фундаментальной теории задачи, привлекающие значитель-
ный исследовательский интерес на протяжении многих лет. Самостоятельное
место в этих исследованиях занимают нелинейные модели и алгоритмы филь-
трации. В силу того что нелинейные системы крайне трудны для изучения
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 19-07-00187-а).
61
общими строгими методами, в этой области допускается определенная ма-
тематическая свобода, заключающаяся в возможности неформального обос-
нования предлагаемых решений соображениями разумности, инженерными
пояснениями и приближенными соотношениями. Полученные таким образом
результаты в целом определяются понятием “субоптимальная фильтрация”.
В отличие от фундаментальных результатов в области оптимальной стоха-
стической фильтрации субоптимальные фильтры имеют реальные перспек-
тивы практического применения, например обеспечивают возможность про-
ведения расчетов для сложных многомерных моделей. И хотя полученные
с их помощью оценки не обладают гарантированными свойствами, характе-
ризующими их качество, имеются примеры, подтверждающие практическую
применимость и полезность. Простой классический пример субоптимального
алгоритма — расширенный фильтр Калмана — успешно применяется в ряде
нелинейных задач, равно как и демонстрирует расходимость в других менее
“удачных” примерах. Детальный обзор субоптимальных алгоритмов филь-
трации не является задачей данной статьи, основное внимание будет уделено
лишь одному успешному и развитому направлению, получившему значитель-
ную популярность — сигма-точечной фильтрации.
Концепция данной модификации фильтра Калмана (unscented Kalman
Filter, сигма-точечный, или СТ-фильтр), впервые изложенная в публика-
ции [1], существенных изменений в дальнейшем не претерпела и успешно
эксплуатируется по настоящее время, превратившись в целое направление,
находящее применение в самых разных областях. Основная идея СТ-фильтра
состоит в аппроксимации непрерывных распределений параметров нелиней-
ной системы наблюдения дискретными с использованием специально под-
бираемого “базиса” — набора сигма-точек. Данная аппроксимация позволяет
приближенно рассчитывать моментные характеристики параметров, которые
используются в рекуррентных уравнениях фильтра калмановской структу-
ры. Хороший обзор приемов, методов и модификаций, касающихся сигма-
точечных алгоритмов фильтрации, можно найти в [2], где сделаны значи-
тельные усилия по систематизации результатов в данной области. Отдель-
ного упоминания заслуживает публикация [3], дополняющая исходную мето-
дику вариантом решения проблемы большой размерности (scaled unscented
transformation), а также [4, 5], исследующие свойства сигма-точечного филь-
тра Калмана для систем специального вида, подходы к робастификации
фильтра [6, 7], оптимизации параметров [8-10], повышению вычислительной
эффективности [11] и обобщению на непрерывное время [12]. Популярность
направления подтверждается большим числом публикаций практической на-
правленности, посвященных применению СТ-фильтра и его адаптации к но-
вым моделям [13-18].
Эвристический подход, характерный для направления субоптимальной
фильтрации, имеет альтернативы, с одной стороны, обеспечивающие стро-
гое математическое обоснование, а с другой — допускающие широкое при-
менение на практике из-за простоты реализации. Такой альтернативой яв-
ляется теория условно-оптимальной фильтрации Пугачева и ее развитие в
отношении динамических систем с дискретным временем — теория условно-
минимаксной нелинейной фильтрации (УМНФ) [19-22]. В настоящее время
62
эти результаты имеют менее широкую область применения по сравнению с
направлением СТ-фильтрации. Цель данной статьи — качественное сравне-
ние концепций, лежащих в основе двух практически значимых подходов, и
иллюстрация результатов этого анализа серией модельных экспериментов.
Отдельной задачей является развитие условно-минимаксного подхода на ос-
нове идей, заложенных в методе СТ-фильтрации.
2. Основная модель
Рассмотрим нелинейную систему наблюдения, описываемую следующими
разностными уравнениями:
xt = ϕ(1)t (xt-1) + ϕ(2)t (xt-1) wt, t = 1,2,... , x0 = η,
(1)
yt = ψ(1)t(xt) + ψ(2)t(xt)vt.
Здесь xt ∈ Rp — случайный процесс, определяющий состояние системы;
yt ∈ Rq — косвенные наблюдения; wt и vt — дискретные белые шумы второ-
го порядка; случайный вектор начальных условий η также имеет конечный
второй момент; процессы wt и vt и вектор η независимы в совокупности.
Их математические ожидания и ковариации далее будем обозначать mw (t) ,
Dw (t), mv (t), Dv (t) , mη, Dη соответственно.
Рассматривается задача оценивания состояния xt по наблюдениям yτ ,
τ = 1,...,t, критерий точности оценки xt — среднеквадратический:
{
}
E ||xt - xt||2
Модель (1) — компромиссное описание системы наблюдения, подходящее
и для сигма-точечных, и для условно-минимаксных фильтров. Более то-
го, практически важным часто оказывается дополнительное предположе-
ние ψ(2)t(x) = 1 и/или требование существования всех моментов у процессов
wt и vt. Для целей данной статьи достаточно отметить, что при линейных
ограничениях на скорость роста функций на бесконечности и наличии вто-
рых моментов у всех возмущений процессы, описываемые (1), являются гиль-
бертовыми. Соответственно, в таких условиях рассматриваемая задача филь-
трации является корректной и можно, таким образом, говорить о ее решении
как об оптимальном — условном математическом ожидании xt относительно
всех наблюдений, так и о каких-то вариантах аппроксимации решения.
3. Исследуемые концепции и методы
В основе обеих выбранных для исследования концепций синтеза алгорит-
мов нелинейной фильтрации лежат две простые статические задачи.
Сначала рассмотрим задачу, решение которой иллюстрирует суть мето-
да УМНФ. Пусть есть случайный вектор z = col (x, y), x ∈ Rp, y ∈ Rq с из-
вестным математическим ожиданием mz = E {z} = col (mx, my) и ковариаци-
63
(
)
Dx Dxy
ей Dz = cov (z, z) =
. Закон распределения Fz вектора z неиз-
Dyx Dy
вестен, предполагается, что Fz ∈ Φ(mz, Dz) — классу всех вероятностных
распределений со средним mz и ковариацией Dz. Требуется найти оценку
x = θ(y) ненаблюдаемого вектора x по наблюдениям y, исходя из среднеквад-
ратического критерия и заданного множества неопределенности Φ. Допусти-
мыми считаются любые оцениватели — измеримые по Борелю функции θ(y).
Точность оценивания, обеспечиваемую оценкой θ(y) при условии, что вектор z
имеет распределение Fz, обозначим через J(θ, Fz) = E{||x - x||2}.
Решение поставленной задачи дает седловая точка, определяемая неравен-
ствами J (θ∗, Fz ) ≤ J (θ∗, F∗z) ≤ J (θ, F∗z), где F∗z — гауссовское распределение
с параметрами mz, Dz, x∗ = θ∗ (y) = DxyD+y y +(mx -DxyD+y my) - наилучшая
в среднем квадратическом линейная оценка x по наблюдению y [21, 22]. При
этом J (θ∗, F∗z) = Dx - DxyD+yDyx. Выше и далее обозначены: cov (x, y) —
ковариационная матрица случайных векторов x и y, E{x} — математическое
ожидание случайного вектора x, + — операция псевдообращения матрицы.
Из данного результата следует, что при формировании оценки в указанной
задаче оценивания x по наблюдению y минимаксно обоснованным является
линейный оцениватель, параметры которого определяются моментными ха-
рактеристиками совместного распределения. Этот результат лежит в основе
метода УМНФ, а именно: оценка фильтрации xt состояния xt получается в
результате решения следующих минимаксных задач для определения прогно-
за xt и его коррекции:
{
}
2
(2)
xt =θt (ξt) ,
θt = argminmax E
||xt
θt (ξt) ||
, z = col(xt,ξt
),
Fz
θt
{
}
2
xt = xt +θt(ζt),
θt = argmin maxE ||xt - xt
θt(ζt)||
, z = col(xt - xt,ζt).
Fz
θt
Здесь и далее ξt = ξt (x) и ζt = ζt (x, y) — некоторые структурные функции
фильтра, варианты выбора которых составляют практический багаж метода.
Далее собственно описание алгоритма УМНФ таково. Пусть имеется
xt-1 — оценка УМНФ состояния xt-1 по наблюдениям yτ , τ = 1,... ,t - 1.
Прогноз xt ищется в виде
(3)
xt = Ftξt + ft, ξt = ξt (xt-1) , ξt (x) = ϕ(1)t (x) + ϕ(2)t (x)mw
(t) .
Структура прогноза “в силу системы” определяется структурной функ-
цией ξt (x) и коэффициентами Ft и ft (матрица и вектор соответствующей
размерности), определяемыми в результате решения задачи (2), а именно
θt (ξt) = Ftξt + ft.
Оценка xt состояния xt ищется в виде
xt = xt + Htζt + ht, ζt = ζt (xt, yt) ,
(4)
ζt (x,y) = y - ψ(1)t (x) - ψ(2)t (x)mv (t).
64
Структура коррекции в форме невязки определяется структурной функ-
цией ζt (x, y) (невязкой) и коэффициентами Ht и ht (матрица и вектор соот-
ветствующей размерности), определяемыми в результате решения задачи (2),
а именно θt (ζt) = Htζt + ht.
Решения обеих задач в (2) при условии конечности необходимых вторых
моментов, очевидно, существуют, но могут быть не единственными. Един-
ственность обеспечивается дополнительным требованием о минимуме евкли-
довой нормы решения и, следовательно, использованием операции псевдооб-
ращения по Муру-Пенроузу. Таким образом, искомые коэффициенты зада-
ются в виде:
Ft = cov (xt, ξt) cov+ (ξt, ξt) , ft = E {xt} - FtE {ξt} ,
(5)
Ht = cov (xt - xt,ζt) cov+ (ζt,ζt) , ht = -HtE{ζt}.
Прогноз xt и оценка фильтрации xt при этом являются несмещенными и
обеспечивают следующее качество оценивания:
Kt = cov (xt - xt,xt - xt) = cov (xt,xt) - Ftcov (ξt,xt),
(6)
Kt = cov (xt - xt,xt - xt) =Kt - Htcov (ζt,xt - xt) ,
т.е. обеспечивается нерасходимость и “содержательность” оценок, подчерки-
вая словом “содержательность” гарантированное преимущество и прогноза,
и оценки по сравнению с тривиальной оценкой, поскольку Ftcov (ξt, xt) ≥ 0,
Htcov (ζt,xt - xt) ≥ 0.
Соотношения (3)-(5) определяют условно-оптимальный фильтр Пугаче-
ва, а концепция УМНФ дополняет их минимаксным обоснованием структу-
ры фильтра. Кроме того, непременным атрибутом УМНФ является способ
практического определения коэффициентов Ft, ft, Ht и ht методом Монте-
Карло, т.е. компьютерное имитационное моделирование. Сам фильтр полу-
чается заменой в (5) математических ожиданий и ковариаций их статистиче-
скими оценками, полученными в результате компьютерного моделирования.
По остальным вопросам, включая условия существования фильтров, можно
обратиться к публикации [23], в которой, кроме того, дан более подробный
обзор метода и направлений его развития. Отметим возможность гибкого
определения структурных функций фильтра — прогнозирующей ξt (x) и кор-
ректирующей ζt (x, y): представленный вариант прогноза “в силу системы” и
коррекции в форме невязки, конечно, является простейшим, и в зависимости
от свойств конкретной системы наблюдения ξt (x) и ζt (x, y) могут существен-
но изменяться.
Отметим еще, что УМНФ, в принципе, можно отнести к так называемым
нелинейным фильтрам Калмана или, как упоминалось в разделе 1, филь-
трам калмановской структуры. Поясним это, записав самый простой из таких
фильтров — расширенный фильтр Калмана (РФК). Здесь и далее не вводят-
ся дополнительные обозначения, а используются уже имеющиеся, например
xt и xt для обозначения прогноза и оценки фильтрации, ξt для прогноза “в си-
лу системы” и ζt для невязки. При этом из контекста понятно, какие именно
65
алгоритмы имеются в виду. Для РФК соотношения таковы:
xt = ξt, ξt = ξt (xt-1) ,
ξt (x) = ϕ(1)t(x) + ϕ(2)t (x)mw(t) ,
(1)
Kt = ft Kt-1fTt + ϕ(2)tDw (t)ϕ(2)tT, ft =∂ϕt (x)
x= xt,
∂x
ϕ(2)t = ϕ(2)t (xt) ,
xt = xt + Htζt, ζt = y - ψ(1)t (x) - ψ(2)t (x) mv (t),
(
)+
(7)
Ht =KthTt ht KthTt + ψ(2)tDv (t) ψ(2)tT
,
(1)
∂ψt
(x)
ht =
x= xt, ψ(2)t =ψ(2)t(xt),
∂x
Kt =Kt - Htht Kt.
Другие повторно использованные обозначения также имеют смысл. Так,
ft, ht — некоторые оценки моментов, точнее, их аппроксимации, полученные
путем линеаризации, Ht имеет тот же смысл, что и в (5),
Kt и
Kt — кова-
риации ошибки прогноза и ошибки оценки, только здесь в отличие от (6) это
аппроксимации в силу элементарной линеаризации нелинейностей ϕ(1)t(x) и
ψ(1)t(x), а в УМНФ — точные значения или их статистические оценки.
Теперь обратимся к СТ-фильтрации. Калмановская структура фильтра в
этом методе сохраняется, а основная идея принципиально другая. Именно:
концептуальную основу СТ-фильтров составляет сигма-точечное преобразо-
вание (unscented transformation), состоящее в следующем. Пусть, как и вы-
ше, есть вектор z = col (x, y) ∈ Rp+q, такой что y = ϕ (x). Относительно рас-
пределения Fx вектора x предполагается, что Fx ∈ Φ (mx, Dx), т.е. известны
два первых момента. Неформально относительно Fx можно сказать, что это
распределение предполагается непрерывным с формой, “близкой” к гауссов-
ской. Более того, во многих публикациях по данной тематике, следуя исход-
ным предложениям [1], обсуждение СТ-фильтрации иллюстрируется приме-
ром расчета именно с гауссовским вектором x. Отметим, что рассуждения
здесь, как и в публикациях, непосредственно посвященных данной тематике,
не претендуют на формальность и не предполагают математической строго-
сти условий и результатов. Как и в любых исследованиях по субоптимально-
му оцениванию, важна именно концептуальная составляющая — идея, обос-
нованная эмпирическими соображениями и подкрепленная модельными при-
мерами. Искомое преобразование состоит в представлении Fx его дискрет-
ным аналогом. Именно: вместо предположения о том, что x может прини-
мать любые значения, будем считать, что область значений x исчерпывается
конечным числом сигма-точек x0, x1, . . . , x2p, с каждой из которых связана
соответствующая вероятность W0, W1, . . . , W2p. Обратим внимание на связь
размерности p вектора x и числа сигма-точек 2p + 1. Это принципиальный
момент, подчеркивающий существенную ограниченность числа сигма-точек,
которых должно быть немного. В противном случае, выбирая неограниченно
66
много xi и подбирая значения Wi, можно, очевидно, добиться любой точ-
ности аппроксимации. Введенные обозначения дают простые приближенные
соотношения для моментов вектора y :
∑
∑
my ≈ ŷ = Wiyi, Dy ≈Dy = Wi(yi - ŷ)(yi - ŷ)T,
i=0
i=0
(8)
∑
(
)
Dxy ≈Dxy = Wi(xi - mx)(yi - ŷ)T, yi = ϕ
xi
i=0
Близость моментов my и ŷ, Dy иDy, Dxy и Dxy в (8) и есть цель СТ-пре-
образования. И эта цель становится яснее с позиции следующего шага — оце-
нивания вектора x по наблюдениям y. Действительно, наилучшая линейная
оценка x по y имеет вид θ∗ (y) = DxyD+yy + (mx - DxyD+ymy), СТ-преобра-
зование даст оценку x =Dxy D+yy + (mx -Dxy D+y ŷ). При этом интуитивно
понятно, что чем точнее величинамиDxy,Dy, ŷ аппроксимируются моменты
Dxy,Dy,my, тем точнее будет и оценка x. Другое дело, что метод сигма-точек
не обременен какими-либо оптимизационными постановками в отношении
наилучшего выбора самих сигма-точек и весов, хотя и содержит изрядное
число разумных, физически обоснованных и практически проиллюстриро-
ванных вариантов их выбора (весьма полезен в этой части обзор [2]).
Заметим, что предложенная интерпретация СТ-преобразования нужна
только для иллюстрации. Обычно в публикациях по СТ-фильтрации не со-
общается о дискретном распределении, а речь идет только о сигма-точках и
“весах”, которые могут быть даже отрицательными. Выбор этих весов может
быть весьма разнообразным и неуниверсальным даже в рамках одной моде-
ли и различается в зависимости от цели преобразования. Один из вариантов,
который использовался в представленных далее расчетах, таков. Зададим па-
раметры преобразования α, β, γ (рекомендации по их выбору и физическая
интерпретация даны, например, в [24]). Определим “параметр масштаба” λ =
= α2 (p + γ) - p. Сигма-точки сформируются следующим образом:
(√
)
x0 = mx, xi
= mx + (p + λ)Dx
,
i = 1,...,p,
i
(9)
(√
)
xi = mx -
(p + λ) Dx
,
i = p + 1,...,2p,
i
)
(√
√
где
(p + λ) Dx
— i-й столбец матрицы
(p + λ) Dx, под корнем от мат-
i
ричнозначного аргумента понимается результат разложения Холецкого. Веса
определяются так:
λ
W0 =
для вычисления
ŷ,
p+λ
λ
(10)
W0 =
+ 1 - α2 + β для вычисления
Dy иDxy,
p+λ
1
Wi =
,
i = 1,...,2p.
2(p + λ)
67
В примерах далее упомянутые рекомендации из [24] были использованы
для выбора базовых значений параметров α∗, β∗, γ∗. Кроме того, в каждой за-
даче дополнительно выполнялась оптимизация, в которой базовые значения
выступали в роли начальных условий, расчеты многократно повторялись для
разных значений параметров и выбирались те, что обеспечивали СТ-фильтру
наибольшую точность. Реализовать такую операцию в рамках данной ста-
тьи удалось благодаря тому, что рассматривались только простые примеры
модельного характера, скалярные состояния и наблюдения, и не ограничи-
валось время, затрачиваемое на эксперименты. На практике, конечно, такая
оптимизация параметров не всегда окажется возможной.
Сделаем два важных замечания. Во-первых, представив оценку СТ-пре-
образования в виде x = mx +Dxy D+y(y - ŷ), обратим внимание на сходство,
функциональную идентичность разности y - ŷ и невязки ζt, а также коэф-
фициентовDxy D+y и Ht в соотношениях (7) РФК. Это сходство и есть эм-
пирическое обоснование использования СТ-преобразования в соотношениях
нелинейного фильтра Калмана.
Второе замечание касается интерпретации моментов Dxy, Dy, my и со-
ответствующих аппроксимацийDxy,Dy, ŷ. Данное описание СТ-преобразо-
вания основано на статической модели оценивания, в которой эти парамет-
ры — просто моменты первого и второго порядков. Если же иметь в виду,
что роль вектора x будет играть состояние xt динамической системы (1), а
предположение о его распределении будет изменяться в зависимости от на-
блюдений yt, выполняющих роль y, то тогда Fx уместно характеризовать как
условное распределение x, форма которого неизвестна, но среднее значение
и ковариация — результаты оценивания, выполненного по ранее поступив-
шим наблюдениям. В этом смысле Dxy, Dy, my следует интерпретировать
как условные моменты.
Теперь изложение можно подытожить соотношениями СТ-фильтра для
системы (1). Эти соотношения приведены в соответствии с [24].
Пусть имеется xt-1 — оценка СТ-фильтра состояния xt-1 по наблюде-
ниям yτ , τ = 1, . . . , t - 1, и
Kt-1 — оценка условной ковариационной мат-
рицы ошибки xt-1 - xt-1. Выберем сигма-точки xit-1 в соответствии с (9)
и веса Wi согласно (10), используя Dx =Kt-1, и пересчитаем сигма-точки
(
)
(
)
xit= ϕ1t
xit-1
+ϕ2t
xit-1
mw (t), i = 0,... ,2p. Прогноз xt ищется в виде
∑
xt =
Wixit,
i=0
(11)
∑
(
)
(
)
(
(
))T
Kt =
Wi
xit - xt
(xit -xt)T +ϕ2t
xit-1
Dw (t)
ϕ2t
xit-1
,
i=0
Kt
где
— СТ-оценка условной ковариационной матрицы ошибки прогноза
xt - xt. Далее пересчитываются следующие сигма-точки
(
)
(
)
yit = ψ1t
xit
+ψ2t
xit
mv (t).
68
Оценка xt состояния xt ищется в виде
∑
∑
(
)
(
)
(
(
))T
Wiyit,
Ky
= Wi
yit - ŷt
(yit - ŷt)T + ψ2t
xit
Dv (t)
ψ2t
xit
,
ŷt =
t
i=0
i=0
∑
(
)
Kxy
(12)
= Wi
xit - xt
(yit - ŷt)T,
t
i=0
Ht =Kxyt(Kyt)+,
xt = xt + Htζt, ζt = yt - ŷt,
Kt =Kt - Ht KytHTt.
Здесь отметим величиныKyt иKxyt, которые являются СТ-оценками услов-
ных ковариации невязки ζt и смешанной ковариации прогноза xt и невяз-
ки ζt соответственно. Следует уточнить, что положения об условных момен-
тах выше опираются на специфическое услов
(
)
состояние xt-1 имеет распределение Fxt-1 ∈ Φ
xt-1,Kt-1 , т.е. вычисленные
на предыдущем шаге фильтрации величины xt-1 иKt-1 интерпретируются
как условное математическое ожидание и условная ковариация, по крайней
мере являются их аппроксимациями. Именно из-за этого соображения ранее
было сделано замечание в отношении интерпретации аппроксимаций
Dxy,
Dy, ŷ, получаемых в результате СТ-преобразования. На взгляд авторов, это
крайне важное замечание в отношении методологии СТ-фильтрации, объяс-
няющее практическую результативность алгоритмов фильтрации и высокую
точность оценок в конкретных экспериментах. При этом термин “условный”
здесь никак не связан с “действительно” условным распределением xt отно-
сительно наблюдений yτ , τ = 1, . . . , t, или какого-то иного набора случайных
величин. Но интуитивно содержание этого предложения понятно, а по форме
оно иллюстрируется строгими соотношениями линейного фильтра Калмана
и теоремой о нормальной корреляции [25].
Наконец, отметим, что использованные в (11) и (12) обозначения специ-
ально выбирались аналогичными обозначениям, использованным в соотно-
шениях (3)-(6) УМНФ и (7) РФК, для того чтобы подчеркнуть сходство и
даже идентичность в их интерпретации.
4. Модельные расчеты
4.1. Статическая регрессия и полярные координаты
Рассмотрим серию модельных примеров, позволяющих проиллюстри-
ровать наличие как “хороших”, так и “неудачных” условий применения
СТ-фильтров и проанализировать в таких же условиях поведение УМНФ.
Отметим, что, в целом, концепция СТ-оценивания представляется вполне
жизнеспособной и полезной и в ней имеются видимые достоинства и даже
перспективы, которые пока не реализованы. Но вместе с этим есть и ограни-
чения, систематическому изучению которых должного внимания со стороны
специалистов в этой области не уделялось. Одна из целей данной статьи —
выявить ограничения СТ-фильтров хотя бы на примерах академического ха-
69
рактера и убедиться, что в таких моделях возможность практической филь-
трации имеется (для этого привлекается УМНФ).
Рассмотрим простой статической пример, модель которого во многих пуб-
ликациях используется для иллюстрации результатов СТ-преобразования
(полностью такие рассуждения хорошо проиллюстрированы в [24]). Пусть
имеется гауссовский вектор col (x, y) , величины x, y интерпретируются как
декартовы координаты точки на плоскости. Будем считать эти координаты
независимыми, неизвестными и наблюдаемыми косвенно. Через ρ и φ обозна-
чим наблюдения соответствующих полярных координат x и y, зашумленных
гауссовским аддитивным шумом:
√
(13)
ρ=
x2 + y2 + vρ, φ = arctg(x/y) + vφ,
где vρ, vφ — независимые центрированные величины со среднеквадратически-
ми отклонениями σvρ = 30 м, σvφ = 5 град. Требуется по ρ и φ оценить x и y.
К оцениванию привлекаются следующие алгоритмы.
1. Наилучшая линейная оценка
θ∗ (ρ,φ) = Dx,y,ρ,φD+ρ,φcol(ρ,φ) + (col(mx,my) - Dx,y,ρ,φD+ρ,φcol(mρ,mφ)),
(
)
( cov(x, ρ) cov(x, φ))
cov(ρ, ρ) cov(ρ, φ)
Dx,y,ρ,φ =
,
Dρ,φ =
cov(y, ρ) cov(y, φ)
cov(φ, ρ) cov(φ, φ)
Все фигурирующие в этих соотношениях моментные характеристики вычис-
ляются методом Монте-Карло по выборке объема 10000.
2. Оценка СТ-фильтра. Вычисляется в точности по тем же формулам с
той лишь разницей, что моменты mρ, mφ, Dx,y,ρ,φ, Dρ,φ вычисляются по фор-
мулам СТ-фильтра (12) (прогноз (11) здесь не требуется в силу статичности
задачи), нужные для этого сигма-точки — по формулам (9), веса — по (10),
при этом параметры α, β, γ подвергаются дополнительной оптимизации, а
именно: выбираются наилучшие значения этих параметров с точки зрения
качества оценивания в рассматриваемой задаче.
Замечание. Здесь и далее, говоря об оптимизации параметров α, β и γ
СТ-фильтра, имеется в виду следующая вычислительная процедура. В соот-
ветствии с рекомендациями [24] в качестве базовых выбираются следующие
значения параметров: α∗ = 0,5, β∗ = 2,0, γ∗ = 3 - p. Вокруг базовых значе-
ний формируется равномерная сетка возможных значений α, β, γ, из кото-
рых выбирается лучшая в смысле минимума второго момента ошибки оцен-
ки СТ-фильтра на последнем шаге фильтрации (единственном в статической
задаче пересчета полярных координат). В окрестности этой комбинации па-
раметров затем производится оптимизация методом Нелдера-Мида. В ито-
ге рассматривается порядка 10000-20000 комбинаций возможных значений
α, β, γ. Следует отметить, что в некоторых случаях вариация параметров
СТ-преобразования относительно базовых α∗, β∗, γ∗ не приводит к видимым
изменениям качества оценивания. В таких случаях, а именно: когда разница
между минимальным и максимальным значениями второго момента ошибки
оценки на последнем шаге фильтрации не превышает 0,1 %, для оценивания
с помощью СТ-фильтра используются базовые значения.
70
Таблица
Сравнение для модели (13)
“Близко”
“Далеко”
D[x - x]
585
562
1. Линейная оценка
D[y - ŷ]
456
514
D[x - x]
614 (444)
562 (553)
2. Сигма-точечная оценка
D[y - ŷ]
467 (395)
514 (508)
D[x - x]
276
564
3. Оценка УМНФ
D[y - ŷ]
323
516
3. Оценка УМНФ. Заметим, во-первых, что наилучшая линейная оценка
в данной задаче также является и оценкой УМНФ, если считать, что струк-
турная функция (в данном статическом примере структурная функция толь-
ко одна) ζ = col(ρ, φ). Но в качестве “действительно” условно-минимаксной
оценки здесь будем использовать ζ = col (ζx, ζy), ζx = ρ cos φ, ζy = ρ sin φ, т.е.
соотношения перехода от полярных координат к декартовым, “обратные” в
смысле модели наблюдения (13). Это характерный пример подбора структу-
ры оценки УМНФ с использованием физического смысла модели.
Неопределенными в модели (13) остаются только условия на расположе-
(
)
Dx
0
ние исходной точки, т.е. параметры col (mx, my) и
. Вторые момен-
0
Dy
ты принципиального разнообразия в эксперимент не внесут, поэтому всюду
полагаем Dx = Dy = 302. А вот значения mx и my будут отражать понима-
ние физического свойства “близко-далеко”. В качестве “близко” полагалось
mx = 30 и my = 40; “далеко” — mx = 300, my = 400. Полученные результаты
представлены в таблице, где через D[x - x] и D[y - ŷ] обозначены диспер-
сии ошибок оценок координат x и y соответствующими алгоритмами. Для
СТ-фильтра дополнительно в скобках указывается оценка соответствующей
дисперсии, полученная усреднением величинKt из (12). Аналогичные “теоре-
тические” значения для линейной оценки и УМНФ не приводятся, так как они
близки к приведенным в таблице “статистическим” и становятся тем ближе,
чем больше экспериментов проводится в рамках метода Монте-Карло.
Для расчетов в модели “близко” были определены следующие параметры
СТ-преобразования: α = 1,06, β = 1,35, γ = 0,91. Эти параметры существен-
но улучшают точность оценивания по сравнению с базовыми, для которых
D[x - x] = 711, D[y - ŷ] = 477. Оптимизация в модели “далеко” не оказала
существенного влияния на качество оценивания, поэтому для СТ-преобразо-
вания были использованы базовые значения α∗, β∗ и γ∗.
Первое, чем обращают на себя внимание приведенные результаты — это
идентичность свойств оценок в модели “далеко”, небольшой проигрыш УМНФ
в рамках статистической погрешности. Достаточно близки при этом и оценки
точности СТ-фильтра, что позволяет считать, что используемые в (12) оцен-
ки условных моментов также хорошо аппроксимируются с помощью сигма-
точек. Второе — это более чем двукратный проигрыш СТ-фильтра в модели
“близко”, сопровождаемый существенной погрешностью аппроксимации дис-
персии ошибки оценки. При этом чуть меньше, но также слишком велика
ошибка линейной оценки. УМНФ справляется с задачей существенно луч-
71
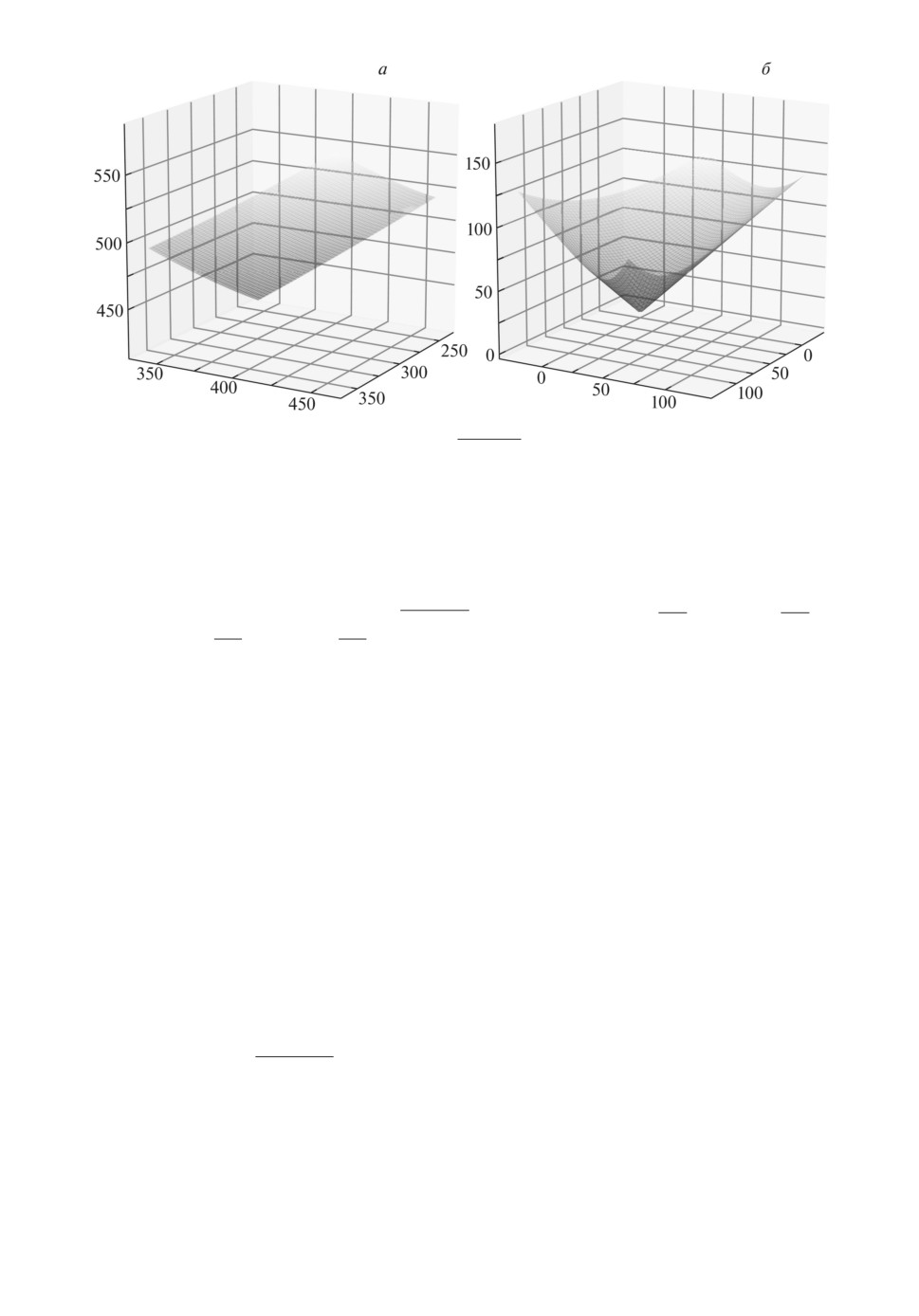
√
Рис. 1. Фрагменты поверхности ρ =
x2 + y2: a - модель “далеко”; б - модель
“близко”.
ше и, что особо любопытно, значительно успешнее, чем в модели “далеко”.
Причина таких результатов, на взгляд авторов, довольна проста. Модель
“далеко” показывает поведение, “близкое к линейному”, модель “близко” —
существенно нелинейна. Подтверждает это рис. 1, на котором изображены
√
фрагменты поверхности ρ =
x2 + y2 для x ∈ [mx - 2√Dx,mx + 2√Dx] и
√
√
y ∈ [my - 2
Dy,my + 2
Dy] и видно, что в модели “далеко” (рис. 1,а) этот
фрагмент визуально неотличим от плоскости, а в модели “близко” (рис. 1,б ) —
это совсем не плоскость, и эта нелинейность, как демонстрирует УМНФ, весь-
ма информативна.
Заметим, что такое поведение СТ-оценки не является неожиданным, на
него обращают внимание многие исследователи, обозначая условие эффек-
тивности СТ-преобразования “консервативностью” ковариации ошибки оцен-
ки, которая в данном примере обеспечивается линейным поведением модели
“далеко” и нарушается — нелинейным поведением модели “близко”.
4.2. Дробно-рациональная регрессия и кубический сенсор
Далее будем рассматривать примеры автономных скалярных динамиче-
ских систем. В таких примерах легко анализировать четко выраженные свой-
ства модели и их влияние, в конечном итоге, на точность оценок. Первая
модель в этом ряду такова:
xt-1
xt =
+ wt, t = 1,... ,T, T = 50, x0 = η,
1+x2
(14)
t-1
yt = xt + x3t + vt.
Шумы wt и vt будем предполагать стандартными гауссовскими, начальное
условие η тоже гауссовским с mη = 0,1 и Dη = 1. Наблюдения в (14) хоро-
шо известны под названием “кубический сенсор”, они очень удобны (инфор-
мативны) для оценивания, так как при больших значениях xt существенно
72
а
б
0,35
0,4
0,30
0,2
0,25
0,20
0
0,15
0,2
0,10
0,4
0,05
0
40
20
0
20
40
4
2
0
2
4
Рис. 2. Характеризация модели (14): a - функция регрессии; б - гистограмма
для xT , E[xT ] = 0, D[xT ] = 1,16.
увеличивают отношение сигнал/шум, а при малых — близки к линейным.
Что касается динамики, то функция регрессии x/(1 + x2) хотя и нелинейная
(рис. 2,а), но демонстрирует довольно инертное поведение — обладает всего
двумя экстремумами, гладкими производными и асимптотически приближа-
ется к нулю на бесконечности.
Отметим также, что фазовый процесс xt обладает одним полезным свой-
ством. Он, очевидно, является эргодическим (нетрудно показать это, сле-
дуя базовым результатам по нелинейной регрессии, изложенным, например,
в [26]), и при этом сходимость к предельному распределению практически
мгновенная: уже на втором шаге при начальных условиях, сильно отличаю-
щихся от предельных, получаются моменты, характерные для предельного
распределения E[xT ] = 0, D[xT ] = 1,16. (на рис. 2,б предельное распределение
иллюстрируется гистограммой xT ). Таким образом, у системы (14) фактиче-
ски отсутствует переходной процесс, поэтому она представляется идеальной
как для СТ-фильтрации, так и для УМНФ.
Здесь и всюду далее СТ-фильтр реализован в соответствии с соотноше-
ниями (11), (12), дополненными упомянутой в первом примере оптимизацией
параметров α, β, γ. Структура УМНФ базовая: ξt (x) = x/(1 + x2), т.е. про-
гноз строится “в силу системы”, ζt (x, y) = y - x - x3 — коррекция в форме
невязки. Параметры УМНФ вычислялись методом Монте-Карло по пучку
105 траекторий (его уместно называть обучающим), этот же пучок исполь-
зовался для оптимизации параметров СТ-фильтра. Качество оценок филь-
трации и моментные характеристики xt оценивались по второму пучку из
106 траекторий. Приведенные условия расчетов применялись и в следующих
примерах.
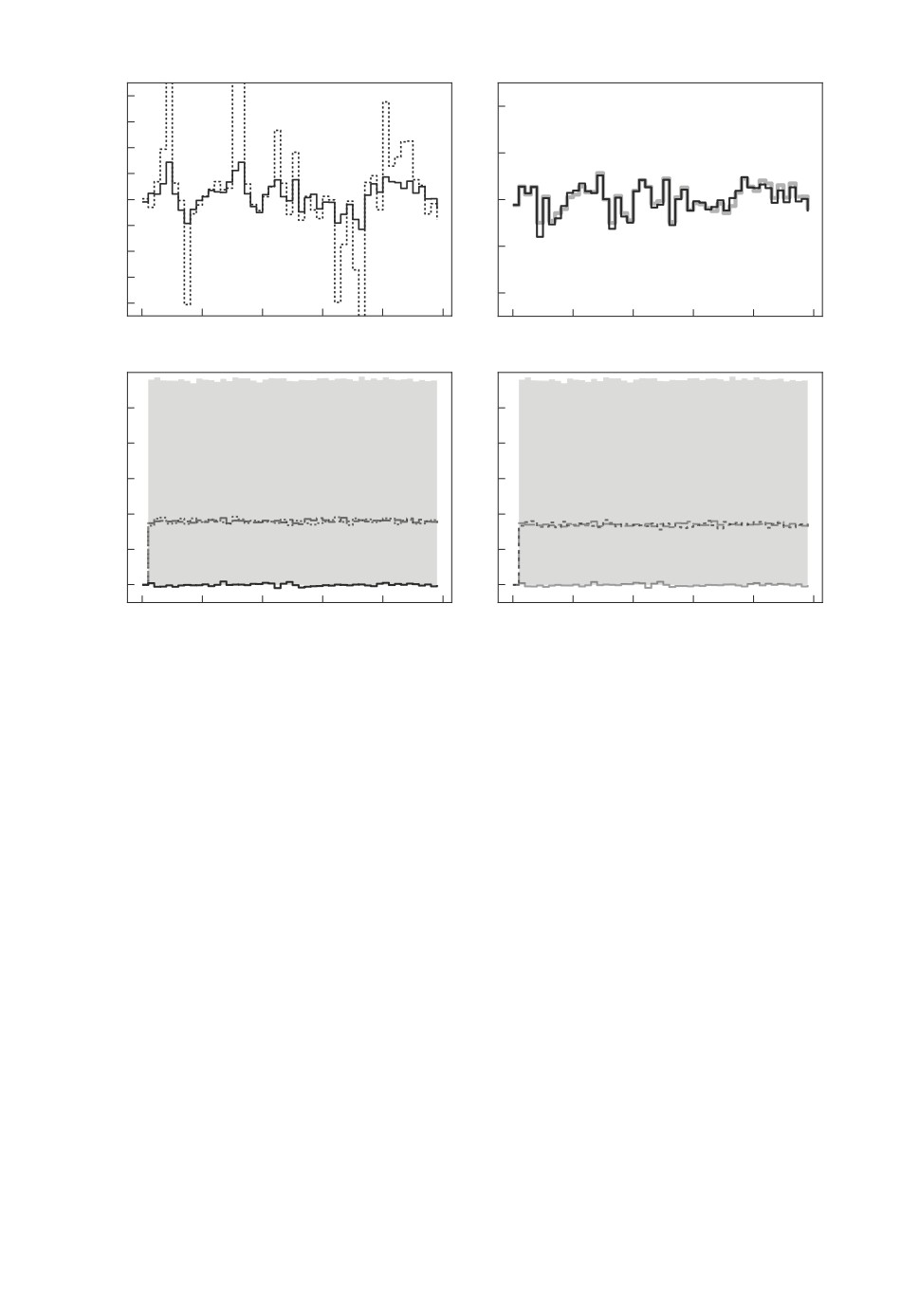
На рис. 3 показаны: примеры характерных траекторий (состояния, наблю-
дения — рис. 3,а), ошибок оценок СТ-фильтра и УМНФ — рис. 3,б , показа-
тели качества оценок — средние и дисперсии ошибок оценок и процесса пока-
73
а
б
8
4
6
4
2
2
0
0
2
2
4
6
4
8
0
10
20
30
40
50
0
10
20
30
40
50
в
г
1,2
1,2
1,0
1,0
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0
0
0
10
20
30
40
50
0
10
20
30
40
50
Рис. 3. Примеры траекторий и показатели качества оценок в модели (14): a -
характерные траектории xt (сплошная линия), yt (точечная линия); б - траек-
тории ошибок фильтрации xt -xt УМНФ (черная линия), СТ-фильтра (серая
линия); в,г - показатели точности УМНФ и СТ-фильтра на фоне дисперсии
процесса D[xt] (верхняя граница серой области): E[xt - xt] (сплошные линии),
D[xt - xt] (пунктирные линии),
Kt (точечные линии).
заны для УМНФ на рис. 3,в, для СТ-фильтра - на рис. 3,г. Выборочные мо-
менты предельных распределений ошибок оценивания равны E[xT - xT ] = 0,
D[xT - xT ] = 0,35 для УМНФ и E[xT - xT ] = 0, D[xT - xT ] = 0,34 для
СТ-фильтра. Дополнительно на рис. 3,в показана априорная оценка точно-
сти УМНФ, т.е. величина
Kt из (6), вычисленная методом Монте-Карло,
KT = 0,35; на рис. 3,г показана “теоретическая” точность — усредненная ве-
личина
Kt из (12),
KT = 0,11. Наилучшие найденные значения параметров
СТ-преобразования в данной модели α = 0,20, β = 1,99, γ = 1,23. Для базо-
вых значений параметров α∗ = 0,5, β∗ = 2,0, γ∗ = 2,0 СТ-оценка оказалась
хуже тривиальной, обеспечивая точность D[xT - xT ] = 1,57 при D[xT ] = 1,16.
Как видно, обе оценки демонстрируют близкие качества, обе несмещен-
ные и содержательные в том смысле, что дисперсия ошибки оценки меньше,
причем существенно меньше, дисперсии самогo процесса и дисперсии шума в
наблюдениях. Отметим также, что СТ-фильтр немного превосходит УМНФ,
но последний имеет самую простую структуру (прогноз “в силу системы”, кор-
рекция в форме невязки) и никаких вариантов ее улучшения не предприни-
74
малось, хотя они и легко просматриваются. Например, к улучшению качества
УМНФ приведет увеличение размерности базовой коррекции ζt (x, y) за счет
“дополнительных” наблюдений y2t, y3t. Также отметим, что “теоретическая”
точность СТ-фильтра далека от реальности, что не мешает ему справляться
с задачей.
4.3. Обратная регрессия
Перейдем теперь к моделям, представляющим не столь комфортные усло-
вия для нелинейного оценивания. При этом состояния, как и ранее, описы-
ваются скалярными автономными регрессиями с гауссовскими возмущения-
ми, обладающими эргодическим свойством. В данном подразделе рассмотрим
сразу две модели, использующих функцию обратной пропорциональности и
наблюдения — прямые линейные:
1
xt =
√
+ 100wt, t = 1, . . . , T, T = 50, x0 = η,
3
xt-1
(15)
yt = xt + 100vt,
(
)
1
xt = min
105,
+ 100wt, t = 1, . . . , T, T = 50, x0 = η,
(16)
x2
t-1
yt = xt + 100vt.
Шумы wt и vt будем предполагать стандартными гауссовскими, началь-
ное условие η — тоже гауссовским с mη = 3 и Dη = 1. Соотношения (15), (16)
необходимо для корректности дополнить равенством xt = 105, если xt-1 = 0.
В обеих моделях регрессионная функция одного класса 1/xδ, δ =13 в (15),
δ = 2 в (16). Разница, легко видеть, в том, что степенью δ в (15) обеспечивает-
ся существование вторых моментов у xt, а в (16) — напротив, нет даже перво-
го момента. Именно поэтому, чтобы сделать задачу фильтрации корректной,
в (16) добавлена верхняя граница 105, которая обеспечивает существование
всех моментов. Предельные распределения процессов xt в (15) и (16) характе-
ризуются типовыми унимодальными плотностями вероятности, предельные
выборочные средние значения E[xT ] равны 0,18 и 6,06, дисперсии D[xT ] равны
10314,41 и 361201,04 соответственно.
Оба процесса xt имеют аналогичное поведение: близкое к нулевому ма-
тематическое ожидание и “много” реализаций около нуля, большая диспер-
сия, обеспечиваемая периодически появляющимися “большими” значениями,
когда реализации xt-1 ≈ 0. Заметим, что обе модели не попадают в сфе-
ру робастного оценивания, здесь нет “исчезнувших” или “ложных” наблю-
дений, выбросов и т.п. Робастификация в традиционном смысле не даст в
этой модели результата, так как редкие всплески требуется оценивать, по-
скольку они представляют фактическое состояние оцениваемого процесса и
не могут быть проигнорированы. Результаты проведенных расчетов иллю-
стрируются следующими рисунками. Для (15) приведены примеры харак-
терных траекторий (состояния, наблюдения — на рис. 4,а), ошибок оценок
СТ-фильтра и УМНФ — на рис. 4,б ), показатели качества оценок — сред-
ние и дисперсии ошибок оценок и процесса показаны для УМНФ на рис. 4,в,
75
а
б
200
400
100
200
0
0
100
200
200
0
10
20
30
40
50
0
10
20
30
40
50
в
г
10 000
10 000
8000
8000
6000
6000
4000
4000
2000
2000
0
0
0
10
20
30
40
50
0
10
20
30
40
50
Рис. 4. Примеры траекторий и показатели качества оценок в модели (15): a -
характерные траектории xt (сплошная линия), yt (точечная линия); б - траек-
тории ошибок фильтрации xt -xt УМНФ (черная линия), СТ-фильтра (серая
линия); в,г - показатели точности УМНФ и СТ-фильтра на фоне дисперсии
процесса D[xt] (верхняя граница серой области): E[xt - xt] (сплошные линии),
D[xt - xt] (пунктирные линии),
Kt (точечные линии).
для СТ-фильтра — на рис. 4,г. Выборочные моменты предельных распре-
делений ошибок оценивания равны E[xT - xT ] = -1,87, D[xT - xT ] = 5107,98
для УМНФ и E[xT - xT ] = -1,62, D[xT - xT ] = 5109,28 для СТ-фильтра.
Дополнительно на рис. 4,в показана величина
Kt из (6),
KT = 5000,11; на
рис. 4,г — усредненная величина
Kt из (12),
KT = 5000,04. Для модели (16)
аналогичные результаты приведены на рис. 5. Выборочные моменты пре-
дельных распределений ошибок оценивания здесь равны E[xT - xT ] = -0,78,
D[xT - xT ] = 9667,38 для УМНФ и E[xT - xT ] = 2,51, D[xT - xT ] = 92521,33
для СТ-фильтра. Дополнительно на рис. 5,в показана величина
Kt из (6),
KT = 9804,96; на рис. 5,г — усредненная величина
Kt из (12),
KT = 5007,19.
В обеих моделях (15), (16) вариация базовых значений параметров СТ-пре-
образования α∗, β∗, γ∗ не приводит к улучшению качества оценки.
Полученные результаты соответствуют ожиданиям: в комфортных услови-
ях модели (15) обе оценки ведут себя одинаково хорошо, в “неудобной” моде-
ли (16) работает только УМНФ, его точность хоть и ненамного, но выше точ-
ности прямых наблюдений. Причина этого не в плохой реализации СТ-филь-
76
а
б
17 500
8000
15 000
12 500
6000
10 000
4000
7500
5000
2000
2500
0
0
0
10
20
30
40
50
0
10
20
30
40
50
в
г
350 000
350 000
300 000
300 000
250 000
250 000
200 000
200 000
150 000
150 000
100 000
100 000
50 000
50 000
0
0
0
10
20
30
40
50
0
10
20
30
40
50
Рис. 5. Примеры траекторий и показатели качества оценок в модели (16): a -
характерные траектории xt (сплошная линия), yt (точечная линия); б - траек-
тории ошибок фильтрации xt -xt УМНФ (черная линия), СТ-фильтра (серая
линия); в,г - показатели точности УМНФ и СТ-фильтра на фоне дисперсии
процесса D[xt] (верхняя граница серой области): E[xt - xt] (сплошные линии),
D[xt - xt] (пунктирные линии),
Kt (точечные линии).
тра, а в неприменимости в этой модели самой концепции сигма-точек, по-
скольку такую нелинейность, как в (16), охарактеризовать небольшим ко-
нечным набором образцов преобразований (сигма-точек), по-видимому, нель-
зя. Но самое неприятное, на взгляд авторов, для СТ-фильтра в этой моде-
ли следующее обстоятельство. В данном простом модельном примере зара-
нее предсказать его плохое поведение можно, просто визуально анализируя
характер нелинейности в уравнении состояния. На практике же такую осо-
бенность вряд ли удастся предсказать априорно, поскольку рассчитывать на
успешный визуальный анализ уравнений, чуть более сложных, чем представ-
ленная скалярная автономная регрессия, вряд ли возможно.
4.4. Логистическая модель
Следующей рассмотрим модель, основанную на дискретном аналоге хо-
рошо известной логистической модели (модели для численности популя-
ции) — логистическом отображении или отображении Фейгенбаума xt =
= δxt-1(1 - xt-1) [27]. Добавив в данную модель аддитивное гауссовское воз-
77
а
б
200
400
200
0
0
200
200
400
400
600
600
800
800
1000
0
10
20
30
40
50
0
10
20
30
40
50
в
г
20 000
20 000
15 000
15 000
10 000
10 000
5000
5000
0
0
0
10
20
30
40
50
0
10
20
30
40
50
Рис. 6. Примеры траекторий и показатели качества оценок в модели (17): a -
характерные траектории xt (сплошная линия), yt (точечная линия); б - траек-
тории ошибок фильтрации xt -xt УМНФ (черная линия), СТ-фильтра (серая
линия); в,г - показатели точности УМНФ и СТ-фильтра на фоне дисперсии
процесса D[xt] (верхняя граница серой области): E[xt - xt] (сплошные линии),
D[xt - xt] (пунктирные линии),
Kt (точечные линии).
мущение, получим динамику системы наблюдения. Модель при этом полу-
чается неустойчивой и, как и ранее, ее приходится искусственно ограничить.
Причем при достижении границы процесс предлагается возвращать в исход-
ное состояние, чтобы взрывные явления повторялись раз за разом. Таким
образом, в этом разделе будем рассматривать следующую систему наблюде-
ния:
{
xt-1 (1 - xt-1) , если xt-1 (1 - xt-1) > -103,
xt =
+ wt, t = 1,... ,50, x0 = η,
0, иначе
(17)
yt = xt + 100vt.
Здесь в основе динамики логистическое отображение с δ = 1, поэтому если
бы в (17) не фигурировала нижняя граница (-103), то имел бы место “взрыв”
в отрицательную область: xt → -∞. Но при этом, даже если убрать из (17)
границу (-103), формально у состояния xt есть все конечные моменты в лю-
бой момент времени, так что решение задачи фильтрации есть для любого t.
Другое дело, что рост моментов и абсолютных значений xt характеризуется
78
степенной скоростью, поэтому при компьютерных расчетах за короткое время
любая траектория в модели без границы превысит компьютерный максимум.
Полученные результаты иллюстрирует рис. 6. Выборочные моменты пре-
дельных распределений ошибок оценивания равны
E[xT - xT ] = -0,83, D[xT - xT ] = 6208,12 для УМНФ
и
E[xT - xT ] = -17,07, D[xT - xT ] = 13527,82 для СТ-фильтра,
тогда как выборочная дисперсия процесса D[xT ] = 16341,25. Дополнительно
на рис. 6,в показана величина
Kt из (6),
KT = 6300,53; на рис. 6,г — усред-
ненная величина
Kt из (12),
KT = 3068,76. В данной модели оптимизация
параметров СТ-преобразования также не дает результата, поэтому использу-
ются базовые α∗, β∗, γ∗.
Данный пример представляется яркой иллюстрацией потенциальных
сложностей практического применения алгоритмов СТ-фильтрации. Он
представляет собой простую полиномиальную регрессию, обеспечивающую
формальное существование всех моментов, и информативные линейные на-
блюдения, но фазовый процесс при этом имеет “взрывной” характер, уследить
за которым сигма-точечным методом не удается. СТ-фильтр оказывается су-
щественно смещенным, точность оценки близка к тривиальной и не выдер-
живает сравнения с точностью УМНФ. Ошибка оценки УМНФ также велика,
но оценивание условно-минимаксным методом имеет смысл, поскольку дис-
персия ошибки определенно меньше дисперсии шума в наблюдениях.
4.5. Модель переключающихся каналов наблюдения
Эта модель основана на идее дополнительного внешнего влияния на харак-
теристики наблюдателя, впервые привлекшей внимание около 50 лет назад
(см., например, [28]) и в дальнейшем обобщенной в моделях систем случай-
ной структуры и скрытых марковских моделях. Здесь рассматривается один
из самых простых вариантов.
Пусть имеется не зависящий от состояния xt белый шум δt, сечения-
ми которого являются дискретные случайные величины, принимающие зна-
чения δi, i = 1, . . . , n, с известным распределением P {δt = δi} = pi. Для
удобства будем считать, что δi — n-мерные единичные векторы, т.е. δi =
= (0, . . . , 1, . . . 0)T, где 1 стоит на i-м месте. Пусть d, σ ∈ Rn. Выражение dTδt
дает i-ю координату вектора d = (d1, . . . , dn)T. Будем считать, что состоя-
ние xt в момент t может наблюдаться одним из n каналов линейных на-
блюдений yt = dixt + σivt, реализация которых определяется величиной δt.
С помощью введенных обозначений такие наблюдения записываются в ви-
де yt = dTδtxt + σTδtvt. Состояние xt опишем простой линейной регрессией,
получив, таким образом, следующую систему наблюдения:
xt = axt-1 + b + cwt, t = 1,... ,T, T = 50, x0 = η,
(18)
yt = dTδtxt + σTδtvt,
где η, wt, vt — стандартные гауссовские.
79
Для проведения расчетов выберем n = 3, p1 = p3 = 0,25, p2 = 0,5, dT =
= (4; 1; 0,5), σT = (1; 1; 3), a = 0,8, b = 0,2, c = 6,0. Предельное распределе-
ние xt, легко видеть, является гауссовским со средним единица и дисперси-
ей 100.
В данном примере нельзя использовать ни соотношения
(11),
(12)
СТ-фильтра, ни соотношения (1)-(4) УМНФ из-за формального несоответ-
ствия моделей (18) и (1). Устраняется это несоответствие следующим обра-
зом. В дополнение к шуму wt введем еще один независимый гауссовский бе-
лый шум {wδt} и непересекающиеся интервалы Δi: P {wδt ∈ Δi} = pi, i = 1, 2, 3.
Далее дополним состояние xt второй координатой
( (
)
(
)
(
))
xδt = I wδt
∈Δ1 ,I wδt
∈Δ2 ,I wδt
∈Δ3
(1, 2, 3)
T,
т.е. номером реализации δt. В уравнении наблюдений вместо dTδt будем ис-
(
)
пользовать функцию ψ(1)t
xt,xδt
= dixt, если xδt = i, i = 1,2,3, и аналогич-
но вместо σTδt — функцию ψ(2)t(xt, xδt) = σixt, если xδt = i. Эти обозначе-
ния формально сводят модель (18) к виду (1), состояние при этом стано-
вится двумерным, наблюдения остаются скалярными. Таким образом, в реа-
лизации СТ-фильтра будет использоваться пять сигма-точек в соответствии
с (9). Заметим, что дополнительных соображений в формировании структу-
ры СТ-фильтра рассматриваемая модель не дает. Иная ситуация с УМНФ.
Специфическая структура системы наблюдения требует учета в структуре
фильтра, в его корректирующем члене ζt (x, y). Действительно, сформировав
стандартный прогноз xt “в силу системы” и определив его точность
Kt со-
гласно (3) и (6), шаг коррекции можно рассматривать как вспомогательную
задачу оценивания xt по одному наблюдению yt = dTδtxt + σTδtvt, решение
которой при дополнительном предположении, что распределение xt — гаус-
совское с параметрами xt и
Kt, легко записать в виде взвешенной суммы
линейных оценок xt по каждому возможному наблюдению yt = dixt + σivt,
веса в которой образуют отношения правдоподобия. Этот подход дает сле-
дующую базовую коррекцию:
)
(
)(
(
3
)-1 (
)
piN y; dixt, di2 Kt
+σi2
di Kt di2 Kt + σi2
y-dix
ζt
(x, y) =i=1
,
)
∑ (
piN y; dixt, di2 Kt
+σi2
i=1
(
)
где через N
y;m,σ2
обозначена гауссовская плотность с параметрами m, σ2,
вычисленная в точке y.
Комментируя это предложение, можно сказать, что выражения
(
)
piN yt;dixt,di2 Kt
+σi2
)
∑ (
piN yt;dixt,di2 Kt
+σi2
i=1
представляют оценку апостериорной вероятности события {δt = δi}, величи-
(
)-1 (
)
ны di Kt di2 Kt + σi2
y-dixt
, по сути, являются корректирующими сла-
80
а
б
20
20
15
10
10
5
0
0
5
10
10
15
20
0
10
20
30
40
50
0
10
20
30
40
50
в
г
120
120
100
100
80
80
60
60
40
40
20
20
0
0
0
10
20
30
40
50
0
10
20
30
40
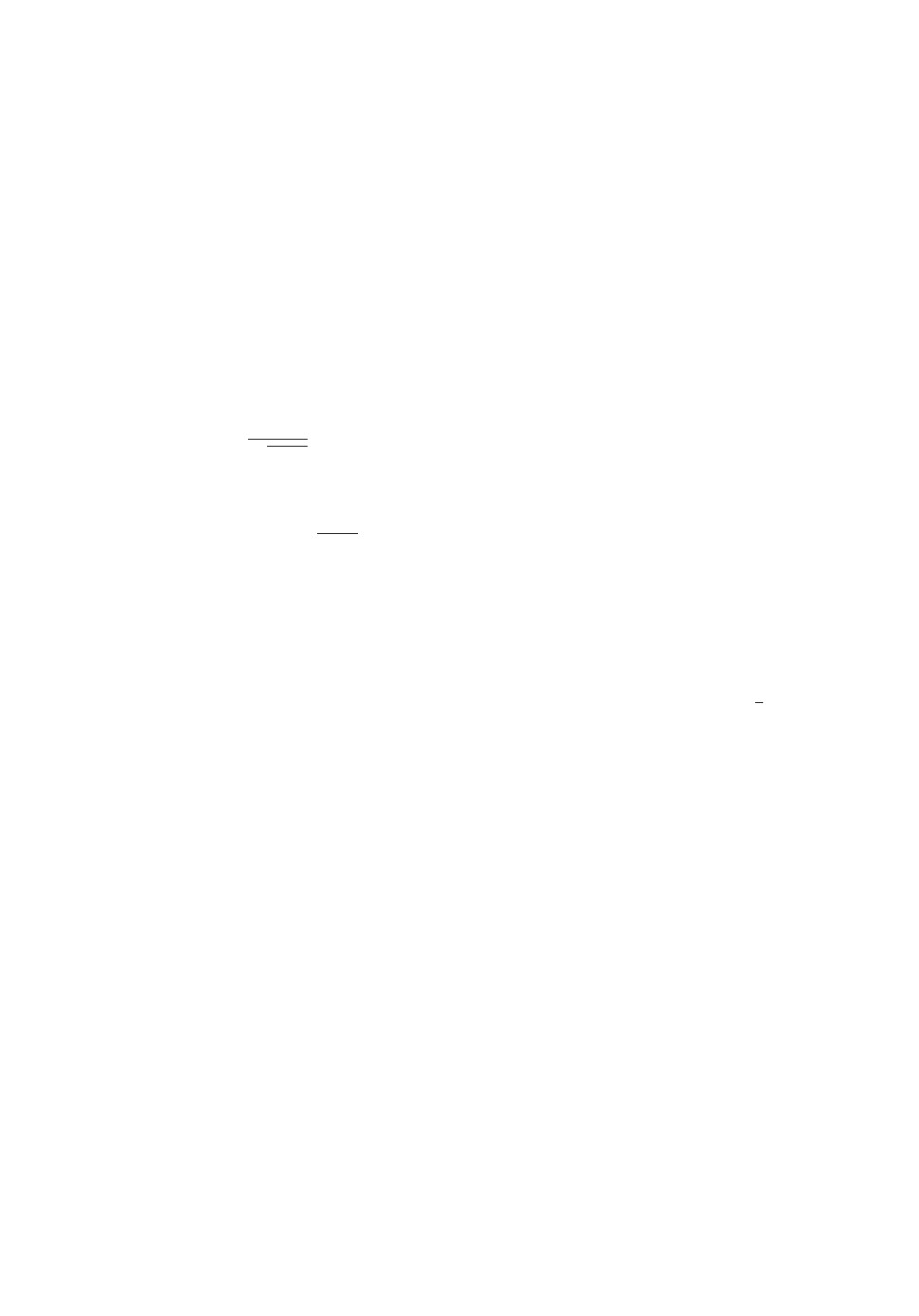
50
Рис. 7. Примеры траекторий и показатели качества оценок в модели (18): a -
характерные траектории xt (сплошная линия), yt (точечная линия); б - траек-
тории ошибок фильтрации xt -xt УМНФ (черная линия), СТ-фильтра (серая
линия); в,г - показатели точности УМНФ и СТ-фильтра на фоне дисперсии
процесса D[xt] (верхняя граница серой области): E[xt - xt] (сплошные линии),
D[xt - xt] (пунктирные линии),
Kt (точечные линии).
гаемыми линейного фильтра Калмана при условии, что в момент t реализо-
вался i-й канал наблюдения.
В данной модели была дополнительно предпринята попытка оптимиза-
ции значений параметров СТ-преобразования отдельно на шагах прогнози-
рования и коррекции, т.е. дополнительного пересчета точек yit в (12) в соот-
ветствии с (9). Наилучшие найденные значения таковы: α = 2,46, β = 3,82,
γ = 2,59 для шага прогнозирования и α = 0,52, β = 4,15, γ = 1,24 для шага
коррекции. При этом добиться серьезного улучшения точности СТ-фильтра
не удается: для базовых значений параметров α∗, β∗, γ∗ точность оценивания
составляет D[xT - xT ] = 71,81.
Результаты расчетов иллюстрирует рис. 7. Выборочные моменты предель-
ных распределений ошибок оценивания равны
E[xT - xT ] = 0,18, D[xT - xT ] = 14,30 для УМНФ
и
E[xT - xT ] = 0,29, D[xT - xT ] = 70,18 для СТ-фильтра.
81
Дополнительно на рис. 7,в показана величина
Kt из (6),
KT = 14,41; на
рис. 7,г — усредненная величинаKt из (12),KT = 45,27.
Результаты демонстрируют ожидаемый значительный проигрыш
СТ-фильтра по отношению к УМНФ. Ясно, что высокое качество оценки
УМНФ обеспечивается выбором коррекции ζt (x,y), отражающим специфи-
ку модели. Иллюстрация гибкости метода УМНФ в отношении структуры
фильтра - одна из целей данного примера и его отличие от всех предыдущих.
СТ-фильтр, наоборот, поставлен в заведомо проигрышные условия формаль-
ным сведением модели (18) к виду (1). В данном примере нетрудно увидеть
и реализовать гораздо более качественный СТ-фильтр, выбрав сигма-точки
с учетом дискретного характера распределения δt, а именно для каждой из
трех сигма-точек, выбранных отдел(но дл)я первой координаты xt, опреде-
лить три двумерных сигма-вектора
xit,δj
, j = 1, 2, 3, сформировав таким
образом окончательный набор из девяти сигма-точек для состояния (xt, δt).
Такой вариант не был реализован по следующим причинам. Во-первых, он
нарушает существенную часть концепции СТ-фильтрации — предположение
о небольшом по отношению к размерности задачи числе сигма-точек (в дву-
мерном случае стандартно рекомендуется пять сигма-точек). Во-вторых,
такой подход для СТ-фильтрации не будет универсальным. Он применим
в данной частной ситуации с тремя переключающимися каналами, так как
9 сигма-точек — не слишком большое число, но с ростом числа каналов
станет неприемлем. Наконец, слишком больших вычислительных ресурсов
требует используемая во всех примерах процедура оптимизации параметров
СТ-фильтрации α, β, γ из соотношений (9), (10).
5. Модифицированный УМНФ
Результаты выполненных экспериментов с СТ-фильтрами, их сравнение с
УМНФ в целом подтверждают эффективность обеих концепций. Тем не ме-
нее, СТ-фильтр в любой практической задаче — это всегда вызов с непредска-
зуемым результатом, и получение хороших результатов — это всегда ориги-
нальная манипуляция параметрами (сигма-точками). Условно-минимаксный
фильтр работает всегда, структура подбирается естественно и несложно, но
при этом оценка может оказаться слишком консервативной, что характер-
но для минимаксных задач. Перспективным представляется комбинирование
двух концепций. Возможный вариант в этом направлении — модификация
УМНФ за счет использования в структуре фильтра оценок условных момент-
ных характеристик, ковариаций, вычисляемых вместе с оценками состояния
на каждом шаге фильтрации по аналогии с тем, как это делается в СТ-филь-
тре. Но в отличие от СТ-фильтров для этого предлагается использовать не
сигма-точечное преобразование, а метод Монте-Карло, т.е. имитационное мо-
делирование.
Для описания алгоритма модифицированного УМНФ (МУМНФ) вернем-
ся к соотношениям (5), (6), в которых коэффициенты УМНФ выражаются
через математические ожидания и ковариации состояния xt, базового про-
гноза ξt, ошибки прогноза xt - xt и базовой коррекции ζt. В реализациях
УМНФ операции E {·} и cov (·, ·) заменялись соответствующими статистиче-
82
скими оценками, рассчитанными априорно по смоделированному пучку тра-
екторий. Обозначим соответствующие операторы усреднения E {·} и cov (·, ·).
∑N
Например, в (5) вместо E {xt} используется E {xt} =1
xit, в (6) вместо
N (i=1
∑N
1
cov (ζt, xt - xt) используется cov (ζt, xt - xt) =
ζit
xit - xit
)T, где N -
N i=1
число смоделированных траекторий, а xit, xit, ζit, i = 1, . . . , N, — реализации.
В модифицированном фильтре предлагается исключить априорное модели-
рование и выполнять оценивание параметров фильтра в процессе расчетов
для каждой траектории. Соответственно алгоритм МУМНФ таков.
Пусть в момент t имеется xt-1 — оценка МУМНФ состояния xt-1 по на-
блюдениям yτ , τ = 1, . . . , t - 1,Kt-1 — оценка условной ковариации ошибки.
На шаге t выполняется моделирование выборок: {xit-1}N
— из гауссовского
i=1
распределения со средним xt-1 и ковариацией
Kt-1, {wit,vit}Ni=1 — дискрет-
ных белых шумов в соответствии с моделью (1), и рассчитываются наборы
{xit, yit}Ni=1 по формулам (1). Прогноз МУМНФ xt ищется в виде xt = E {xt} .
Заметим, что здесь не нужна функция базового прогноза ξt, коэффициент
Ft = 0, поскольку не моделируется выборка оценок xt-1, и расчет выпол-
няется также, как и на первом шаге УМНФ. Точность прогноза определя-
ется как
Kt = cov (xt - xt,xt - xt). Далее формируется набор {ζit}Ni=1 и вы-
числяются коэффициенты Ht = cov (xt - xt, ζt) cov+ (ζt, ζt), ht = -HtE {ζt},
(
)
ζit = ζt
xt, yit
и оценка точностиKt =Kt - Htcov (ζt, xt - xt). Оценка xt со-
стояния xt, как и в УМНФ, ищется в виде xt = xt + Htζt + ht, ζt = ζt (xt, yt).
Таким образом, идея МУМНФ состоит в аппроксимации условного рас-
пределения xt-1 относительно yτ , τ = 1, . . . , t - 1, гауссовским, а соответст-
вующих моментов — результатами фильтрации, и в вычислении параметров
фильтра через оценки математических ожиданий и ковариаций, полученных
имитационным моделированием. Заметим, что предположение о гауссовской
аппроксимации условного распределения можно считать таким же минимакс-
ным контекстом, что и в УМНФ. Также важно отметить, что размеры моде-
лируемых выборок в УМНФ и МУМНФ должны принципиально отличаться,
поскольку расчет коэффициентов УМНФ выполняется априорно и, таким
образом, ничем не ограничен, расчет коэффициентов МУМНФ выполняется
в процессе фильтрации, т.е. предполагает реализуемость в режиме реально-
го времени. По этой причине в экспериментах для УМНФ моделировались
пучки объемов 105 и в отдельных примерах 106 траекторий, далее в расчете
МУМНФ N полагается равным 103.
Для проверки работоспособности МУМНФ и демонстрации продуктивно-
сти комбинирования концепций УМНФ и СТ-фильтрации рассмотрим мо-
дель регрессии с порогами. Из множества проведенных экспериментов это
самая простая модель, которая демонстрирует идентичное поведение УМНФ
и СТ-фильтра, с одной стороны, и преимущество МУМНФ — с другой. Осно-
вана эта модель на следующей идее. Пусть для скалярного xt определены
n интервалов (xi-1, xi], i = 1, . . . , n: -∞ = x0 < x1 < . . . < xn-1< xn = +∞.
Через e(xt) обозначим n-мерный единичный вектор: e(xt) = (0, . . . , 1, . . . 0)T,
где единица стоит на i-м месте, если xt ∈ (xi-1, xi]. Пусть a, b, c ∈ Rn. Вы-
83
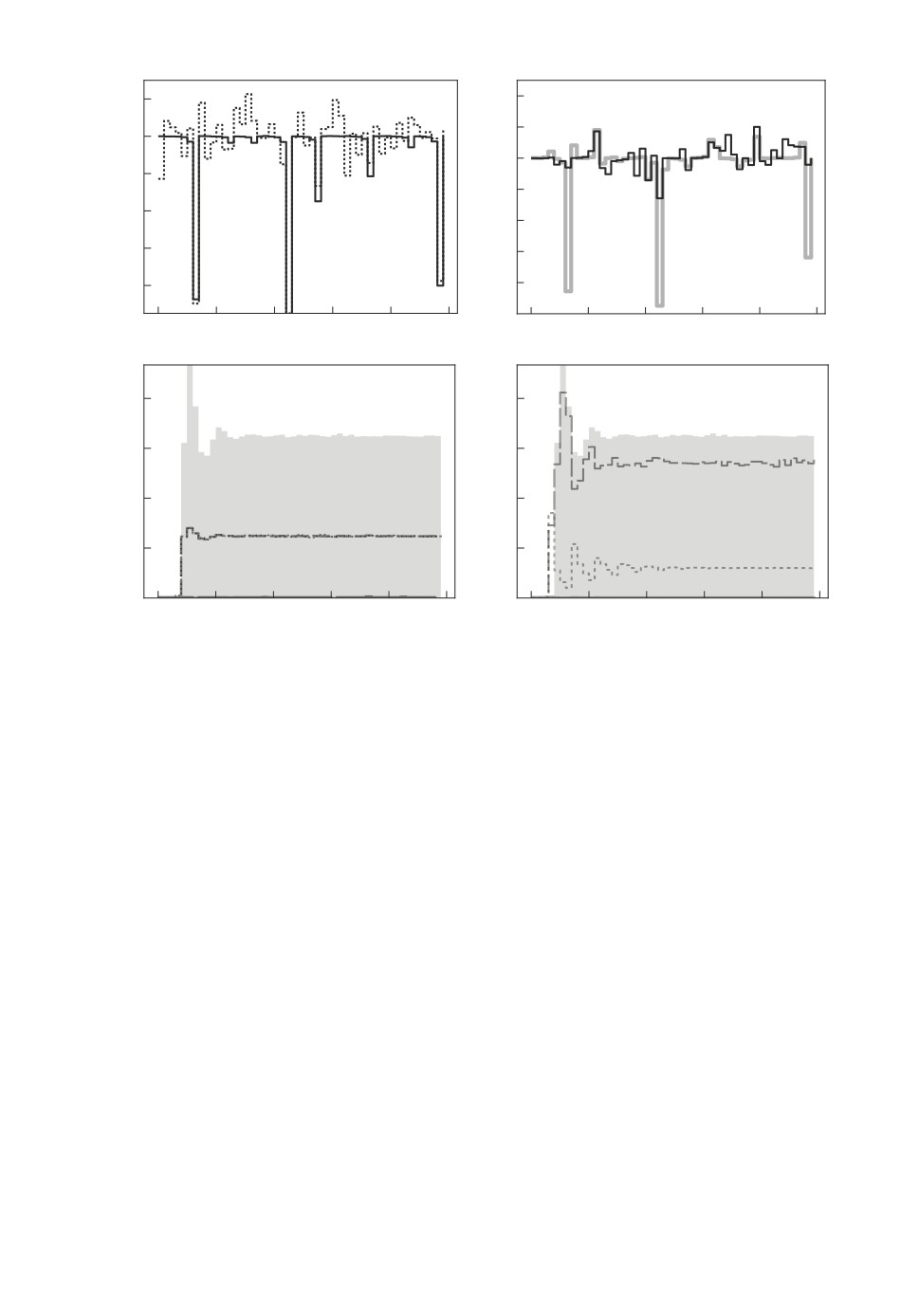
а
б
0,16
16
0,14
14
12
0,12
10
0,10
8
0,08
6
0,06
4
0,04
2
0,02
0
0
0
10
20
0
10
20
30
40
50
Рис. 8. Модель (19): a - гистограмма для xT , E[xt] = 5,56, D[xT ] = 15,93;
б - дисперсия ошибки оценки СТ-фильтра (серая линия), УМНФ (черная
сплошная линия) и МУМНФ (черная точечная линия) на фоне дисперсии
процесса D[xt] (верхняя граница серой области).
ражение aTe(xt) дает i-ю координату вектора a, номер которой определя-
ется принадлежностью xt i-му отрезку. С помощью этого простого приема
легко записать, например, n линейных регрессий: i-я регрессия будет иметь
вид aix + bi + ciwt. Окончательная модель имеет вид xt = aTe (xt-1) xt-1+
+bTe(xt-1) + cTe(xt-1) wt, т.е. представляет собой комбинацию n авторегрес-
сий первого порядка. Дополнив приведенные соотношения простыми линей-
ными наблюдениями, получаем следующую систему наблюдения:
xt = aTe(xt-1) xt-1 + bTe(xt-1) + cTe(xt-1)wt, t = 1,2,... , x0 = η,
(19)
yt = xt + 10vt,
где η, wt, vt — стандартные гауссовские.
Для проведения расчетов выберем n = 3, интервалы -∞ < 3 < 7 < +∞,
aT = (0,3; 0,4; 0,7), bT = (1,4; 3,0;3,0), cT = (0,9; 1,5; 2,5). Как и во всех мо-
делях ранее, и здесь процесс xt — эргодический, его предельное распределе-
ние проиллюстрировано рис. 8,а, а выборочные моменты равны E[xT ] = 5,56,
D[xT ] = 15,93.
У этого распределения легко видеть три “пика”, соответствующие трем
устойчивым авторегрессиям xt = aixt-1 + bi + ciwt. Предельное распределе-
ние каждой их регрессий, рассмотренной в отдельности от других, будет
гауссовским со средним mi = bi/(1 - ai) и дисперсией σ2i = c2i/(1 - a2i). Об-
разуя вместе с заданными порогами процесс xt в соответствии с (19), вы-
бранные параметры обеспечивают предельную плотность, показанную на
рис. 8,а, которой отвечают следующие вероятности p1 = P (xt ≤ 3,0) ≈ 0,33,
p2 = P(3,0 < xt ≤ 7,0) ≈ 0,37, p3 = P(xt > 7,0) ≈ 0,3.
Кроме мультимодального предельного распределения модель (19) еще поз-
воляет продемонстрировать возможность гибкого формирования структуры
оценки УМНФ. Причем здесь, в отличие от модели с переключающимися ка-
84
налами наблюдения (18), структуру фильтра определяет прогноз. Используе-
мая, как и в большинстве примеров приведенных ранее, коррекция в форме
невязки естественна для линейных наблюдений. Прогнозирующую структур-
ную функцию ξt (x) определим по аналогии с коррекцией дл( модели)(18)
на основе отношений правдоподобия, используя обозначение N
x;m,σ2
для
гауссовской плотности:
3
(
)
piN
x;mi,σ2i
(aix + bi)
ξt
(x) =i=1
∑ piN (x;mi,σ2)
i
i=1
Комментируя такой базовый прогноз, можно сказать, что выражение
∑
piN(x;mi,σ2i)
i=1
следует рассматривать как элементарную оценку предельной плотности, по-
казанной на рис. 8,а, а отношение
∕∑3
piN(x;mi,σ2i)
piN(x;mi,σ2i)
i=1
- как оценку условной вероятности попадания xt-1 в i-й интервал.
Результаты расчетов иллюстрирует рис. 8,б . Все три исследуемых филь-
тра демонстрируют хорошее качество оценивания, МУМНФ с предельной
выборочной дисперсией ошибки оценки D[xT - xT ] = 9,82 имеет небольшое
преимущество порядка 2-3 %, СТ-фильтр c D[xT - xT ] = 10,11 совсем незна-
чительно проигрывает УМНФ c D[xT - xT ] = 10,06. При этом напомним, что
для СТ-фильтра используется предварительная оптимизация параметров,
УМНФ также требует выполнения значительного объема априорных рас-
четов, тогда как для МУМНФ нет необходимости в априорных вычислени-
ях, а значит, отсутствуют ограничения в отношении горизонта оценивания.
Наилучшие найденные значения параметров СТ-преобразования в данной
модели: α = 0,71, β = 1,45, γ = 2,56 для шага прогнозирования и α = 0,41,
β = 1,80, γ = 1,84 для шага коррекции, они позволяют улучшить точность
оценивания СТ-фильтра D[xT - xT ] = 11,77 для базовых значений α∗, β∗, γ∗.
В заключение отметим, что подбор простой модели для иллюстрации ре-
зультатов МУМНФ оказался довольно затруднительным. Продемонстриро-
ванный результат обеспечен, по-видимому, характерным предельным распре-
делением (рис. 8,а). Большего эффекта удастся добиться, если отказаться от
скалярных уравнений.
6. Заключение
В целом, совокупность экспериментов, проведенных со всеми рассмотрен-
ными фильтрами, позволяет на качественном уровне дать характеристику
85
вычислительной трудоемкости и ресурсоемкости алгоритмов. Необходимость
априорного расчета и хранения коэффициентов УМНФ делает этот фильтр
самым ресурсоемким. При этом объем хранимых параметров определяется
задаваемым горизонтом фильтрации, а значительные затраты на априорное
моделирования компенсируются крайней простотой вычисления апостериор-
ных оценок и характеризуются той же вычислительной сложностью, что име-
ет классический фильтр Калмана в линейной задаче. “Оптимизированный”
СТ-фильтр в скалярном случае предполагает проведение такого же неболь-
шого объема вычислений, но этот объем растет с ростом размерности задачи,
т.е. с ростом числа 2p + 1 сигма-точек xit ∈ Rp, усложняется в связи с необхо-
димостью выполнения вычисления матричнозначного корня на каждом шаге
оценивания. Кроме того, надо учитывать, что отсутствие априорных расче-
тов для СТ-фильтра не гарантирует даже “удачного” выбора его параметров,
а оптимизация, выполненная в рассмотренных экспериментах, требует тех
же ресурсов, что и моделирование параметров УМНФ в скалярных приме-
рах. Вычислительная сложность такой оптимизации экспоненциально растет
с ростом размерности, так что возможность оптимального подбора парамет-
ров α, β, γ СТ-фильтра в практически значимых задачах представляется
сомнительной. Отсутствие априорных расчетов и затрат на хранение пара-
метров — свойство и преимущество МУМНФ. Достигается оно за счет пе-
реноса шагов моделирования в апостериорный расчет. Объем моделирования
при этом меньше, чем для априорного расчета коэффициентов УМНФ (в при-
мерах 103 против 105 и 106), но все равно значительный, и представляется
целесообразным только при наличии соответствующих вычислительных воз-
можностей, которыми обладают современные компьютерные системы.
СПИСОК ЛИТЕРАТУРЫ
1. Julier S.J., Uhlmann J.K., Durrant-Whyte H.F. A New Approach for Filtering
Nonlinear Systems // Proc. IEEE Amer. Control Conf. (ACC’95). 1995. P. 1628-
1632.
2. Menegaz H.M.T., Ishihara J.Y., Borges G.A., Vargas A.N. A Systematization of
the Unscented Kalman Filter Theory // IEEE Trans. Autom. Control. 2015. V. 60.
No. 10. P. 2583-2598.
3. Julier S.J. The Scaled Unscented Transformation // Proc. IEEE Amer. Control
Conf. (ACC’02). 2002. P. 4555-4559.
4. Xu L., Ma K., Fan H. Unscented Kalman Filtering for Nonlinear State Estimation
with Correlated Noises and Missing Measurements // Int. J. Control Autom. Syst.
2018. V. 16. No. 3. P. 1011-1020.
5. Li L., Xia Y. Stochastic Stability of the Unscented Kalman Filter with Intermittent
Observations // Automatica. 2012. V. 48. No. 5. P. 978-981.
6. Lee D., Vukovich G., Lee R. Robust Unscented Kalman Filter for Nanosat Attitude
Estimation // Int. J. Control Autom. Syst. 2017. V. 15. No. 53. P. 2161-2173.
7. Zhao Y., Gao S.-S., Zhang J., Sun Q.-N. Robust Predictive Augmented Unscented
Kalman Filter // Int. J. Control Autom. Syst. 2014. V. 12. No. 5. P. 996-1004.
8. Scardua L.A., da Cruz J.J. Complete Offline Tuning of the Unscented Kalman
Filter // Automatica. 2017. V. 80. P. 54-61.
86
9.
Straka O., Dunik J., Simandl M. Unscented Kalman Filter with Advanced
Adaptation of Scaling Parameter // Automatica. 2014. V. 50. No. 10. P. 2657-
2664.
10.
Dunik J., Simandl M., Straka O. Unscented Kalman Filter: Aspects and Adaptive
Setting of Scaling Parameter // IEEE Trans. Autom. Control. 2012. V. 57. No. 9.
P. 2411-2416.
11.
Biswas S.K., Qiao L., Dempster A.G. A Novel a Priori State Computation Strategy
for the Unscented Kalman Filter to Improve Computational Efficiency // IEEE
Trans. Autom. Control. 2017. V. 62. No. 4. P. 1852-1864.
12.
Sarkka S. On Unscented Kalman Filtering for State Estimation of Continuous-Time
Nonlinear Systems // Trans. Autom. Control. 2007. V. 52. No. 9. P. 1631-1641.
13.
Li X., Liu A., Yu C., Su F. Widely Linear Quaternion Unscented Kalman Filter
for Quaternion-Valued Feedforward Neural Network // IEEE Signal Process. Lett.
2017. V. 24. No. 9. P. 1418-1422.
14.
Bhotto M.Z.A., Bajic I.V. Constant Modulus Blind Adaptive Beamforming Based
on Unscented Kalman Filtering // IEEE Signal Process. Lett. 2015. V. 22. No. 4.
P. 474-478.
15.
Li L., Xia Y. Unscented Kalman Filter over Unreliable Communication Networks
with Markovian Packet Dropouts // Trans. Autom. Control. 2013. V. 58. No. 12.
P. 3224-3230.
16.
Wu P., Li X., Bo Y. Iterated Square Root Unscented Kalman Filter for
Maneuvering Target Tracking Using TDOA Measurements // Int. J. Control
Autom. Syst. 2013. V. 11. No. 4. P. 761-767.
17.
Jochmann G., Kerner S., Tasse S., Urbann O. Efficient Multi-Hypotheses
Unscented Kalman Filtering for Robust Localization // Lect. Notes Comput. Sci.
(including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in
Bioinformatics) 7416 LNCS. 2012. P. 222-233.
18.
Leven W.F., Lanterman A.D. Unscented Kalman Filters for Multiple Target
Tracking with Symmetric Measurement Equations // Trans. Autom. Control. 2009.
V. 54. No. 2. P. 370-375.
19.
Пугачев В.С. Рекуррентное оценивание переменных и параметров в стохасти-
ческих системах, описываемых разностными уравнениями // ДАН СССР. 1978.
Т. 243. № 5. С. 1131-1133.
20.
Пугачев В.С. Оценивание переменных и параметров в дискретных нелинейных
системах // АиТ. 1979. № 6. С. 63-79.
Pugachev V.S. Estimation of Variables and Parameters in Discrete-Time Nonlinear
Systems // Autom. Remote Control. 1979. V. 40. No. 4. P. 39-50.
21.
Панков А.Р. Рекуррентная условно-минимаксная фильтрация процессов в раз-
ностных нелинейных стохастических системах // Изв. РАН. Теория и системы
управления. 1992. № 3. С. 63-70.
Pankov A.R. Recurrent Conditionally Minimax Filtering of Processes In Nonlinear
Difference Stochastic Systems // J. Comput. Syst. Sci. Int. 1993. V. 31. No. 4.
P. 54-60.
22.
Pankov A.R., Bosov A.V. Conditionally Minimax Algorithm for Nonlinear System
State Estimation // IEEE Trans. Autom. Control. 1994. V. 39. No. 8. P. 1617-1620.
23.
Борисов А.В., Босов А.В., Кибзун А.И., Миллер Г.Б., Семенихин К.В. Ме-
тод условно-оптимальной нелинейной фильтрации и современные подходы к
оцениванию состояний нелинейных стохастических систем // АиТ. 2018. № 1.
С. 3-17.
87
Borisov A.V., Bosov A.V., Kibzun A.I., Miller G.B., Semenikhin K.V. The
Conditionally Minimax Nonlinear Filtering Method and Modern Approaches to
State Estimation in Nonlinear Stochastic Systems // Autom. Remote Control. 2018.
V. 79. No. 1. P. 1-11.
24. Wan E.A., Van der Merwe, R. The Unscented Kalman Filter/ Kalman Filtering
And Neural Networks / Haykin S. (ed). N.Y.: John Wiley & Sons. 2001. P. 221-280.
25. Ширяев А.Н. Вероятность. М.: Наука, 1989.
26. Bhattacharya R.N., Lee C. Ergodicity of Nonlinear First Order Autoregressive
Models // J. Theor. Probab. 1995. V. 8. No. 1. P. 207-219.
27. May R.M. Simple Mathematical Models with Very Complicated Dynamics //
Nature. 1976. V. 261. P. 459-467.
28. Nahi N. Optimal Recursive Estimation with Uncertain Observation // IEEE Trans.
Inform. Theory. 1969. V. 15. No. 4. P. 457-462.
Статья представлена к публикации членом редколлегии М.М. Хрусталевым.
Поступила в редакцию 15.11.2018
После доработки 05.02.2019
Принята к публикации 07.02.2019
88