Автоматика и телемеханика, № 8, 2019
Управление в социально-экономических
системах
© 2019 г. П.И. САФОНОВ, канд. техн. наук (safonov@stcloudstate.edu)
(Государственный университет штата Миннесота, Сен-Клауд, США)
ДВОЙСТВЕННЫЙ АЛГОРИТМ ПРОГНОЗИРОВАНИЯ
ТЕХНОЛОГИЧЕСКИХ МАТРИЧНЫХ СТРУКТУР
В ДИНАМИЧЕСКИХ МОДЕЛЯХ ТИПА ЗАТРАТЫ—ВЫПУСК
На основе глобального метода последовательного улучшения Крото-
ва предложен двойственный вычислительный алгоритм для дискрет-
ной задачи оптимального управления, соответствующей выпуклой зада-
че квадратичного программирования большой размерности с сепарабель-
ным функционалом, возникающей при прогнозировании матрицы пря-
мых затрат в динамических моделях межотраслевого баланса. С помо-
щью декомпозиции удается воспользоваться специальным видом матри-
цы ограничений для уменьшения размерности задачи.
Ключевые слова: модель межотраслевого баланса, матрица прямых за-
трат, сбалансированное прогнозирование, квадратичное программиро-
вание, декомпозиция, двойственный метод оптимального управления
В.Ф. Кротова.
DOI: 10.1134/S0005231019080099
1. Введение
Для эффективного принятия решений и прогнозирования на макроэко-
номическом уровне необходимы информационные и программные средства,
обеспечивающие анализ данных, имитационное моделирование и расчет оп-
тимальных сценариев на основе математических моделей и методов системно-
го анализа. В современной экономике сфера применения таких компьютер-
ных систем включает разработку макроэкономических сценариев развития
на уровне страны (региона) с учетом межотраслевого баланса.
Основы моделей межотраслевого баланса (моделей типа затраты—выпуск)
были заложены В.В. Леонтьевым [1] и развиты многочисленными последо-
вателями. В работах В.И. Гурмана, В.Ф. Кротова и их коллективов [2-6]
были предложены обобщения для модели Леонтьева, в том числе были по-
строены оптимизационные модели для социо-эколого-экономических систем.
Привлечение аппарата теории оптимального управления динамическими си-
стемами [7-9] стало основой для создания технологий для расчета сценариев
в динамике с учетом тех или иных управлений, целевых критериев качества
управлений и ограничений. Поскольку задачи оптимального управления, рас-
сматриваемые в таких моделях, нередко оказываются достаточно сложны-
ми в математическом и вычислительном смыслах (например, ввиду возмож-
ной вырожденности оптимизационных задач в смысле принципа максимума
109
Л.С. Понтрягина, большой размерности системы и других факторов), то для
решения таких задач оказывается не достаточным применение тех или иных
«универсальных» методов теории оптимального управления и соответствую-
щего программного обеспечения, т.е. требуется разработка специальных вы-
числительных алгоритмов и программных средств, учитывающих специфику
моделей.
В частности, в работах коллективов В.И. Гурмана и В.Ф. Кротова (в Ин-
ституте проблем управления РАН, и Институте динамики систем и теории
управления Сибирского отделения РАН) было создано специальное матема-
тическое и программное обеспечение для идентификации систем и построе-
ния динамических сценариев на основе управлений (например, [2-6, 10, 11]).
Соответствующие методы решения задач оптимального управления во мно-
гом базируются на теории достаточных условий оптимальности, предложен-
ных В.Ф. Кротовым [9].
Цель статьи — разработка вычислительного алгоритма, основанного на
известном методе глобального улучшения В.Ф. Кротова, для сбалансиро-
ванного прогнозирования матричных структур динамической модели типа
затраты—выпуск, описанной ниже, с учетом ее специфики.
2. Постановка задачи
Рассматривается динамическая модель следующего общего вида [12]:
∑
(2.1)
Xi(t) =
aij(t)Xj(t) + Yi(t) - Impi
(t),
j=1
∑
(2.2)
Yi(t) =
dij(t)Ij(t) + Ci(t) + Expi
(t),
j=1
(2.3)
Ki(t + 1) = Ki(t) + Vi(t) - Wi
(t),
(2.4)
V i(t) = ΦiV (Ii(t),... ,Ii(t - τvi
)),
(2.5)
Wi(t) = ΦiW (Ki(t),... ,Ki(t - τwi
)),
(2.6)
Xi(t) = Fi(t,Ki(t),Li
(t)),
(2.7)
A(t) = ΦA(X(t), . . . , {A(tkA
)}),
(2.8)
D(t) = ΦD(I(t), . . . , {D(tkD
)}),
где i = 1, n, t = t0, T (например, годы), Xi(t) — валовые выпуски; Yi(t) — ко-
нечный продукт; Impi(t), Expi(t) — соответственно импорт и экспорт i-й от-
расли; Ci(t) — непроизводственное потребление продукции отрасли i (вклю-
чающее в себя личное потребление, расходы на оборону, прочие статьи го-
сударственного потребления, а также запасы); Ki(t) — стоимость основных
производственных фондов (ОПФ); Vi(t), Wi(t) — величина ввода в действие
и выбытие ОПФ отрасли i; Ii(t) — капитальные вложения в i-ю отрасль в
году t; Li(t) — численность занятых в i-й отрасли; A(t) = ∥aij(t)∥ — матрица
110
коэффициентов прямых затрат; {A(tkA )}, {D(tkA )} — множества отчетных
статистических матриц; D(t) = ∥dij (t)∥ — матрица технологической структу-
ры капитальных вложений. Модель включает в себя балансовые соотношения
блоков с постоянной структурой (2.1)-(2.3) и блоков с переменной структу-
рой (2.4)-(2.8), для каждого из которых может существовать более чем один
вариант соответствующих им операторов Fi, ΦiV , ΦiW , ΦA, ΦD, i = 1, n. От-
метим, что многие практически интересные производственные функции при-
дают модели нелинейный характер.
В общем случае данные соотношения представлены в виде уравнений с
распределенными лагами (2.4) и (2.5), где τvi и τwi обозначают максималь-
ную глубину запаздывания соответственно в процессах обновления и старе-
ния фондов i-й отрасли.
В данной статье акцент сделан на один из центральных блоков модели —
блок прогнозирования технологической структуры материального производ-
ства, т. е. прогнозирование матричной функции A(t).
С внедрением в производство новых технологий происходит переход на
использование новых материалов, изменение их пропорций, что влечет изме-
нение количественных показателей, характеризующих межотраслевые связи.
Применительно к модели это означает, что изменению подвергается матрица
коэффициентов прямых затрат.
Моделировать происходящие технологические сдвиги можно различными
способами. Один из них — задать тенденции изменения коэффициентов пря-
мых затрат экзогенно. Это целесообразно, если надо изучить последствия
технологических изменений, т. е. выяснить, как такие изменения повлияют
на структуру и темпы экономического роста. Другой способ — использовать
дополнительные соображения и устойчивые статистические закономерности,
связывающие технологические коэффициенты с остальными переменными
модели.
Ряд методов прогнозирования динамики матрицы A(t) предполагает ста-
тистическое экстраполирование тенденций в изменении ее элементов. Такие
алгоритмы (см., например, [13, 14]) позволяют достаточно точно отразить
поведение коэффициента каждого в отдельности, но не гарантируют адек-
ватного описания общих (суммарных) тенденций в материальных затратах и
промежуточном потреблении.
Достижение сбалансированности матричных элементов с их суммами по
строкам и столбцам (строчными и столбцовыми окаймлениями) обеспечива-
ет известный метод RAS [15]. Основным предположением в нем является то,
что более устойчивые и гладкие траектории, присущие окаймлениям, долж-
ны предопределять характер частных изменений элементов матрицы. Однако
метод полностью абстрагируется от изменений в матрице под влиянием вре-
менного фактора и в явном виде время вообще не учитывает.
Модернизированные методы прогнозирования матриц A(t), D(t) синте-
зируют в себе оба подхода и предназначены для получения «структурно-
динамического сбалансированного прогноза» [16]. Идея такого подхода со-
стоит в нахождении прогнозных значений элементов матрицы, динамика ко-
торых определяется поведением их траекторий в предшествующий период и
111
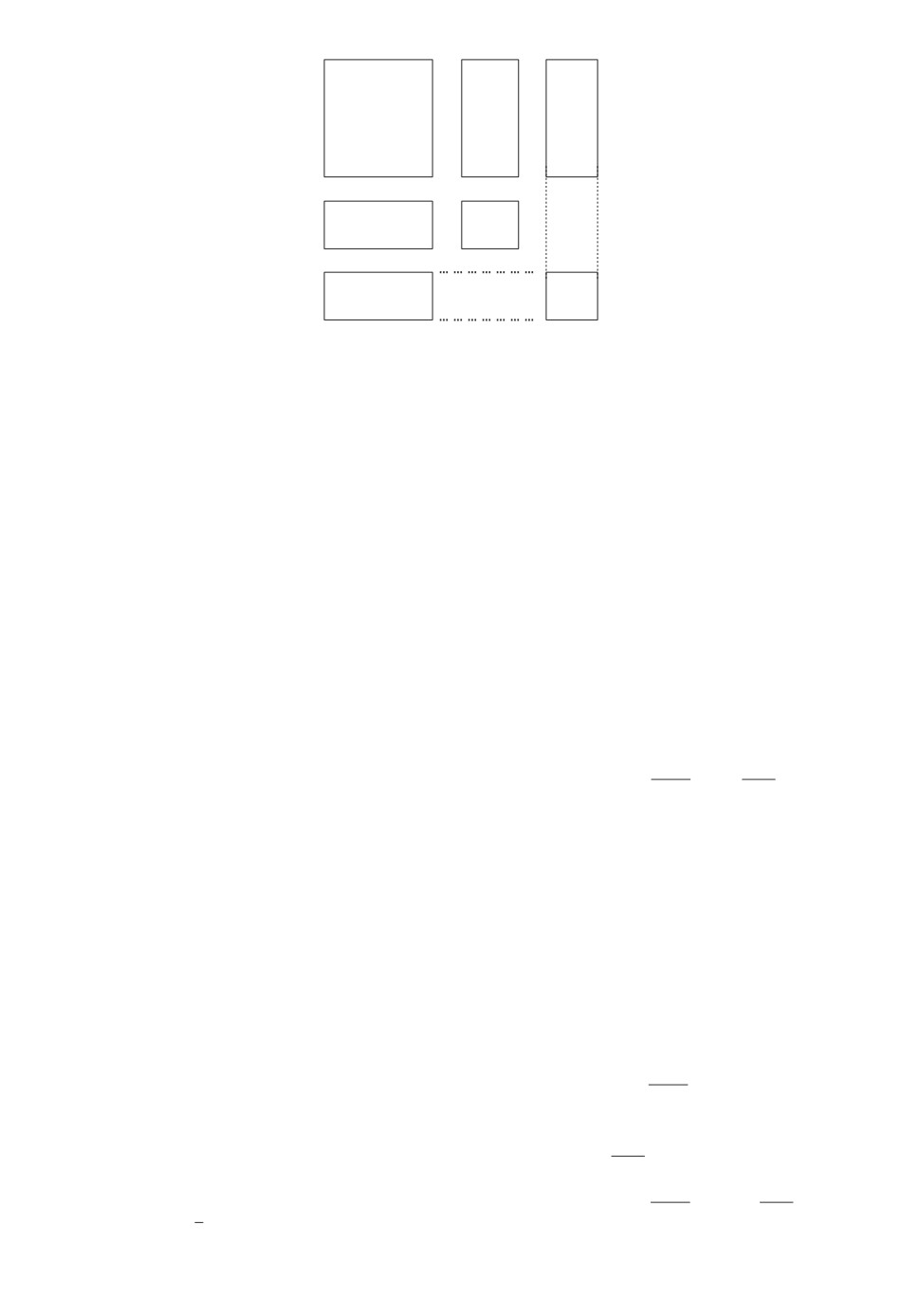
Xij
Pi
Zj
Q
Рис. 1. Окаймления матрицы межотраслевых потоков.
факторами, воздействующими на них в рассматриваемый период. В отличие
от метода RAS в данном методе фактор времени учитывается в явном виде.
Рассматриваемый ниже метод, основанный на [16], применительно к прогно-
зированию матрицы прямых затрат был развит в [12].
Изложим суть метода в обобщенном виде применительно к матрице пря-
мых затрат A. Введем обозначения: Xij(t) — матрица межотраслевых пото-
∑
ков; pi =
Xij — вектор промежуточного продукта отраслей, идущего на
j=1
∑
производственное потребление; zj = Xij — вектор материальных затрат
i=1
∑
∑
∑
отраслей; Q = pi = zj =
∑Xij — совокупная величина промежуточ-
i
j
i j
ного продукта. Таким образом, pi и zj , являющиеся соответственно строч-
ными и столбцовыми окаймлениями матрицы Xij , сбалансированы, в свою
очередь, с величиной Q (рис. 1).
Аналогично для матрицы коэффициентов прямых затрат aij = Xij /Xj
имеет место сбалансированность:
∑
∑
(2.9)
pi =
aijXj, zj =
aijXj
,
j = 1,n, i = 1,m.
j=1
i=1
Если ввести величины αi = pi/Xi — долю промежуточного продукта в ва-
ловом выпуске отраслей, βj = zj /Xj — материалоемкость валового продукта
∑
отраслей, xi = Xi/ Xj — удельный вес i-й отрасли в валовом внутреннем
j=1
продукте (ВВП), то тождество (2.9) можно переписать в виде:
∑
(2.10)
βj(t) =
aij
(t),
i=1
∑
(2.11)
αi(t) =
aij(t)xj(t)/xi
(t).
j=1
112
∑ n∑
Величина γ =
Xij/ Xj
= Q/X, интерпретируемая: а) как доля
i j
j
суммарного промежуточного продукта в ВВП и б) как материалоемкость
общественного продукта, соответственно равна
∑
∑
(2.12)
γ(t) =
αi(t)xi(t) =
βj(t)xj
(t),
i=1
j=1
где βj (t), αi(t), γ(t) — соответственно элементы окаймляющей строки, окайм-
ляющего столбца и суммарная величина окаймления, xj(t), xi(t) — в общем
случае весовые множители, суть коэффициенты отраслевой структуры вало-
вого продукта.
В предлагаемом методе выделяются два подхода — дезагрегационный
и комбинированный [12], отличающиеся способом согласования прогнозных
значений окаймляющих величин с прогнозными величинами âij(t).
При дезагрегационном подходе алгоритм прогнозирования разбивается на
три этапа.
1. Осуществляется прогноз суммарной доли γ: ее расчетные величины γ(t)
формируются либо с помощью подбора кривых роста, либо экспертным пу-
тем.
2. Строятся “частные” (не зависимые друг от друга) прогнозы αi(t)
βj(t)
окаймляющих долей αi и βj, а затем производится их согласование (баланси-
ровка) с суммарной долей γ(t) в соответствии с (2.12). Для этого решаются
две задачи квадратичного программирования [17]
⎧
∑
⎪
(αi(t) - αi(t))2
⎪
-→ min,
⎪
αi(t)
αi(t)
⎨
i=1
(2.13)
∑
⎪
αi(t)xi(t) = γ(t),
⎪
⎪
⎩ i=1
αi(t) ≤ αi(t) ≤ αi(t), i = 1,m,
⎧
(
)2
⎪
∑
βj(t)
βj(t)
⎪
-→ min,
⎪
⎨
βj(t)
βj(t)
j=1
(2.14)
∑
⎪
βj(t)xj(t) = γ(t),
⎪
⎪
⎩ j=1
βj(t) ≤ βj(t)
βj(t), j = 1,n,
в которых минимизируется суммарное относительное отклонение искомых
величин αi(t) и βj (t) от их частных прогнозов. При этом учитываются ниж-
ние и верхние границы допустимого варьирования переменных αi(t) и βj (t),
соответственно αi(t), αi(t) и βj(t),
βj(t). Отметим, что прогноз весовых ко-
эффициентов xi(t) также осуществляется автономно.
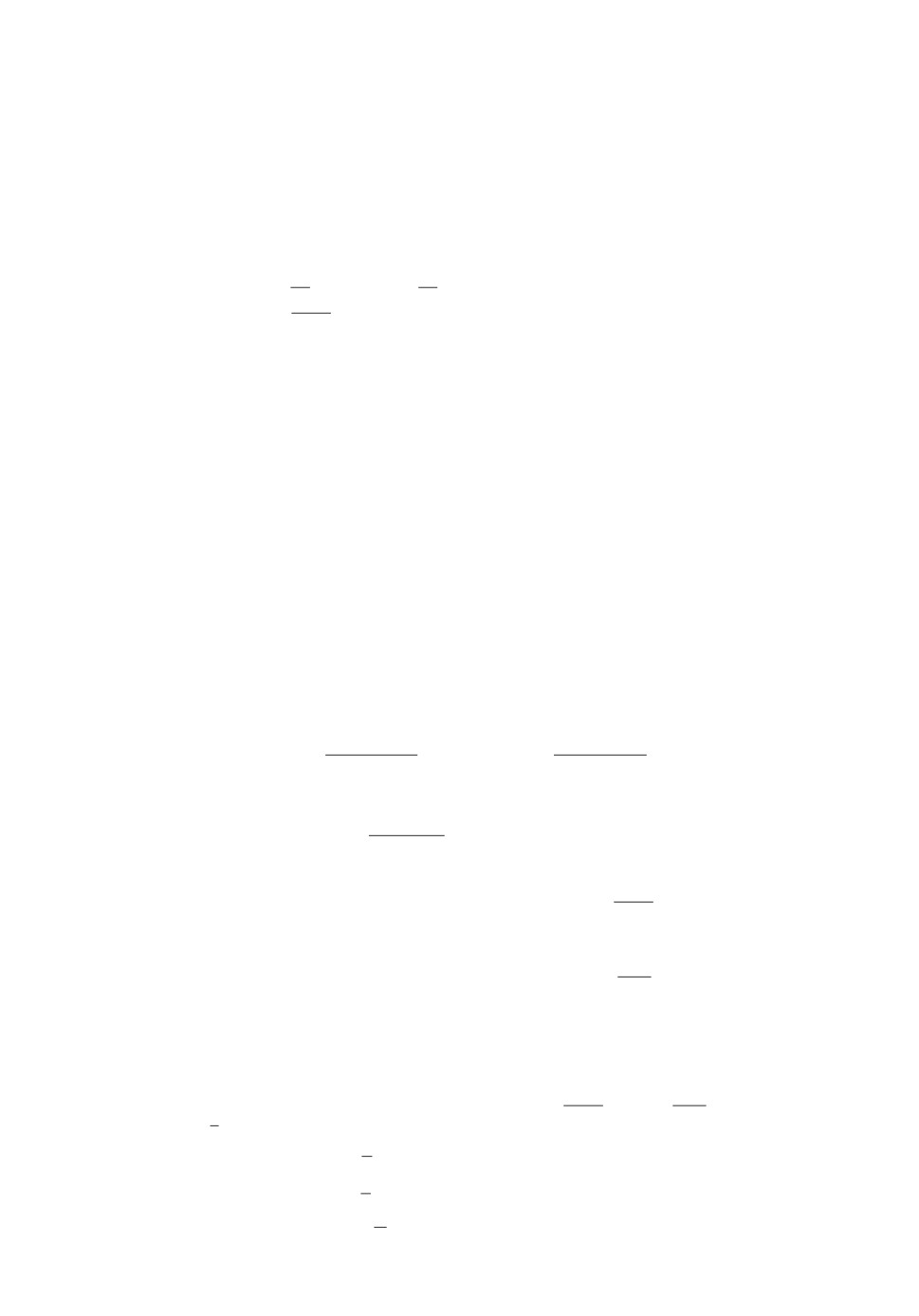
Таким образом, при решении задач (2.13), (2.14) согласуются три группы
независимо сформированных прогнозов: xi(t), γ(t) и {αi(t)
βj(t)} (рис. 2).
113
aij
i
X i
j
X j
X
Рис. 2. Согласование независимых прогнозов.
3. Прогноз коэффициентов прямых затрат âij(t) осуществляется на основе
модификации предложенного в [16] “динамизированного” метода RAS.
Предполагается, что поведение расчетных траекторий элементов данной
матрицы âij(t) определяется близостью их к имеющимся в отдельные годы
отчетного периода элементам матриц A(t1), A(t2), . . ., A(tk) и изменением
элементов базисной матрицы A0 под воздействием прогнозных окаймлений.
(Не нарушая общности рассуждений, можно за базисную матрицу A0 по-
ложить последнюю, имеющуюся в статистической отчетности A(tk), тогда
начальный год моделирования t0 = tk). При этом предполагается, что “отно-
сительный прирост любого элемента структурной матрицы в году t форми-
руется из двух аддитивных составляющих, одна из которых является общей
для всех элементов данного столбца, другая — общей для всех элементов
данной строки” [16]. Такая зависимость отражается формулой
(
)
(2.15)
âij(t) = a0ij
1 + rifi(t) + sjgj(t)
Функции fi(t) и gj (t), такие что fi(t0) = gj (t0) = 0, i = 1, m, j = 1, n, опре-
деляют характер изменения составляющих относительных темпов прироста
во времени. Их вид считается известным, и характер поведения в основном
определяется динамикой окаймлений.
Прогноз коэффициентов матрицы âij(t) с учетом сделанных выше предпо-
ложений о характере поведения расчетных траекторий сводится к необходи-
мости решения задачи квадратичного программирования (ЗКП) следующего
вида:
⎧
⎪
∑[
(
)]2
⎪
a0ij
1 + rifi(tl) + sjgj(tl) - aij(tl)
-→ min,
⎪
ri,sj
⎪
i=1 j=1 l=1
⎪
⎪
∑
(
)
⎨
a0ij
1 + rifi(t) + sjgj(t)
xj = αi(t)xi, i = 1,m,
(2.16)
⎪
j=1
⎪
⎪
∑
(
)
⎪
a0ij
1 + rifi(t) + sjgj(t)
= βj(t)), j = 1,n,
⎪
⎪
⎩ i=1
(
)
aij(t) ≤ a0ij
1 + rifi(t) + sjgj(t)
≤ aij(t), i = 1,m, j = 1,n.
114
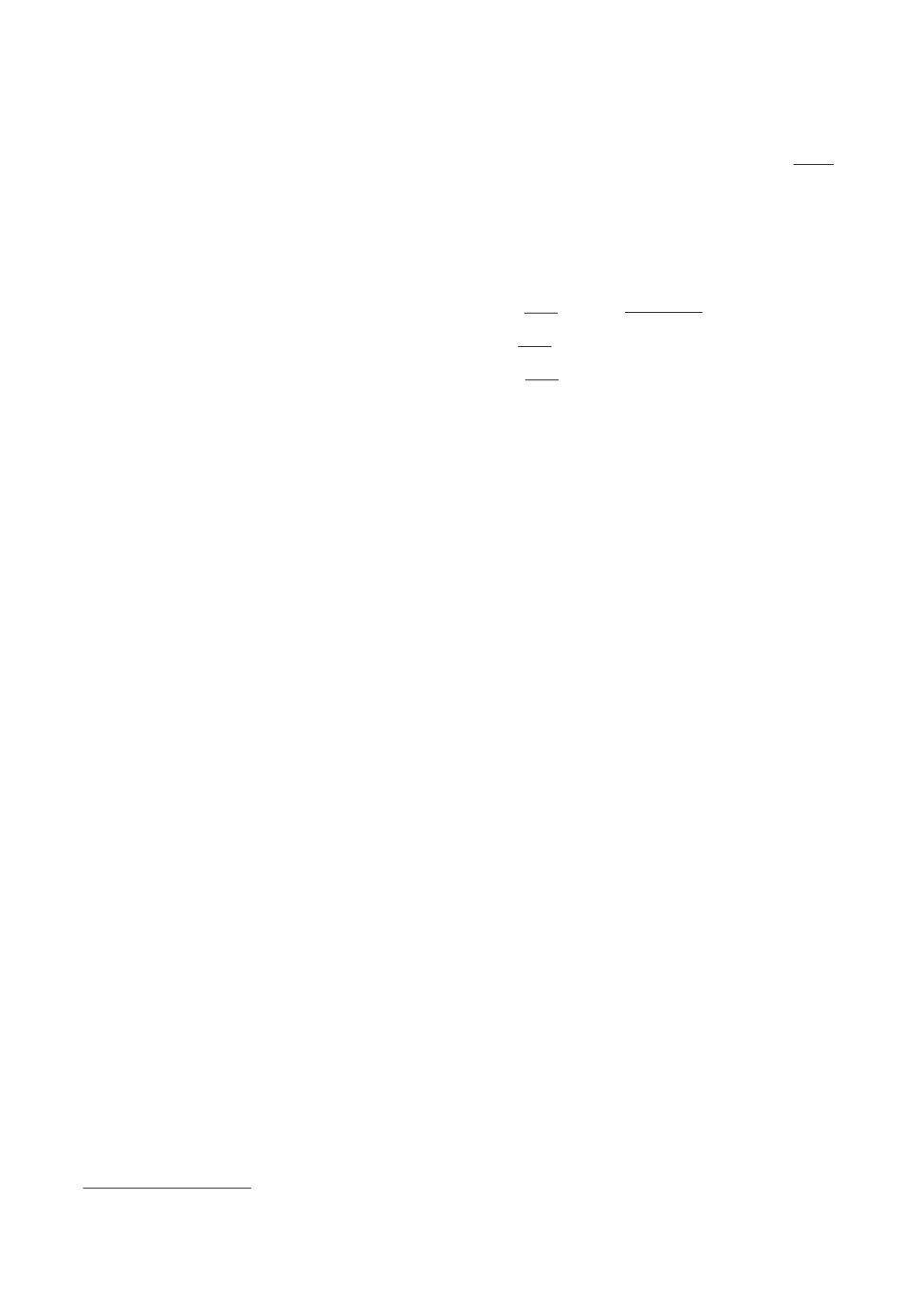
Статистические
Последовательность
Ограничения,
и эндогенные
дезагрегации
экзогенно
переменные
показателей
задаваемые
промежуточного
пользователем
потребления
xi(t)
(t)
i(t)
j(t)
^
^
i(t), j(t)
i(t), j(t)
i(t)
j(t)
fi(t), gj(t)
ri, sj
ij(t)
{
^
(t)
ij(t )},
ij
l
ij(t)
l = 1, k
Рис. 3. Схема дезагрегационного алгоритма.
В данной постановке в отличие от [16], где рассматривается прогноз пото-
ков, а не коэффициентов, имеют место также дополнительные ограничения
типа неравенств, отражающие точку зрения экономистов, строящих прогноз.
С помощью величин aij (t), aij(t) можно управлять поведением отдельных,
наиболее важных коэффициентов aij(t).
На схеме (рис. 3) изобразим причинно-следственные связи в описанном
дезагрегационном алгоритме прогнозирования.
Характерной особенностью “дезагрегационного” прогнозирования являет-
ся то, что в нем неявно предполагают, что достоверность прогноза суммар-
ной величины выше, чем достоверность суммы прогнозов ее составляющих
(и поэтому, в частности, последние получаются исходя из первого). При этом
вероятнее всего имеют в виду свойство наколения вычислительной ошибки
при суммировании и то, что динамика окаймлений имеет более устойчивый
и гладкий вид по сравнению с динамикой суммированных величин. Однако
именно последний факт позволяет рассчитывать на то, что в данном случае
ошибки частных прогнозов при суммировании будут не накапливаться, а вза-
имно компенсироваться. Поэтому согласование расчетных траекторий âij(t) с
прогнозами αi(t), βj (t) (предварительно согласованными с γ(t)) имеет смысл
не только для повышения надежности прогноза матрицы A(t), сколько по-
115
тому, что ее прогноз сам по себе является более сложной и не менее важной
самостоятельной задачей, чем расчет более агрегированных показателей.
Таким образом, в процессе дезагрегирования информации по цепочке
(γ) → (αi, βj ) → (aij) матрица A(t) “теряет” статус параметра модели и ста-
новится эндогенной переменной, причем не промежуточной, а итоговой. Дей-
ствительно, во-первых, из выражений (2.14)-(2.16) следует зависимость A(t)
от xi, а главное, во-вторых, если матрица A(t) рассчитана в соответствии с
системой (2.16) при уже известных величинах αi(t), то для нахождения век-
тора конечного продукта {Yi} нет необходимости решать уравнения меж-
отраслевого баланса Y = (E - A) X, поскольку тогда достаточно вычислить
Yi = (1 - αi)Xi, i = 1,m. Другими словами, при прогнозировании коэффи-
циентов прямых затрат в рамках данного подхода речь идет не об “учете
динамики параметра A(t)”, а о прогнозе собственно межотраслевых связей,
моделируемых технологическими коэффициентами aij .
Алгоритм прогнозирования при комбинированном подходе заключается в
независимом построении прогнозов γ(t), αi(t)
βj(t) и их одновременном со-
гласовании с теоретической зависимостью (2.15) для aij(t, ri, sj). При этом
в отличие от описанной выше трехэтапной дезагрегационной процедуры ре-
шается одна, комбинированная задача, в которой минимизируется средне-
взвешенное квадратическое отклонение âij (tl) от их статистических вели-
чин aij (tl) и искомых γ, αi, βj от их частных прогнозов γ(t), αi(t)
βj(t):
∑
∑(
)2
θa
âij(tl,ri,sj) - aij(tl)
+
i=1 j=1 l=1
(
)2
∑
∑
(αi - αi(t))2
βj
βj(t)
(2.17)
+θα
+θβ
+
αi(t)
βj(t)
i=1
j=1
(γ - γ(t))2
+θγ
-→ min
,
γ(t)
ri,sj,αi,βj,γ
∑
(2.18)
âij(t,ri,sj)xj(t) = αixi
(t), i = 1, m,
j=1
∑
(2.19)
âij(t,ri,sj) = βj
,
j = 1,n,
i=1
∑
(2.20)
âij(t,ri,sj)xj
(t) = γ,
i=1 j=1
(2.21)
aij(t) ≤ âij(t,ri,sj) ≤ aij
(t),
i = 1,m, j = 1,n,
(2.22)
αi(t) ≤ αi(t) ≤ αi
(t),
(2.23)
βj(t) ≤ βj(t)
βj
(t),
(2.24)
γ(t) ≤ γ(t) ≤ γ(t).
116
Здесь θa, θα, θβ, θγ — задаваемые экзогенно весовые множители, с по-
мощью которых регулируется суммарная степень близости каж(дой из)груп-
пы показателей к соответствующим статистическим значениям
aij(tl)
либо
(
)
частным прогнозам
γ(t), αi(t)
βj(t)
В данной задаче ограничение (2.20) совместно с (2.18), (2.19) обеспечивает
выполнение балансовых равенств (2.12) и поэтому может быть эквивалентно
заменено на любое из них.
Отметим, что в “комбинированном” алгоритме прогноз матрицы A(t)
влияет на расчет конечного продукта Yi = (1 - αi)Xi, поскольку в зависи-
мости (2.17)-(2.24) величины γ, αi, βj , âij оцениваются совместно в отличие
от алгоритма (2.14)-(2.16).
Численные методы прогнозирования для описанных алгоритмов предла-
гаются в следующем разделе.
Следует отметить, что в рамках природно-экономической модели [4] этот
метод можно применить также для прогнозирования матрицы коэффициен-
тов прямых затрат на восстановление ресурсов A(z) и матрицы коэффициен-
тов фондообразующих затрат при восстановлении ресурсов B(z).
3. Вычислительные алгоритмы методов прогнозирования динамики
технологических параметров модели
Рассмотренные выше алгоритмы прогнозирования межотраслевых мат-
ричных структур, дезагрегационный и комбинированный, предполагают ре-
шение для каждого года моделирования t = [t0, T ] задач квадратичного про-
граммирования (2.13), (2.14), (2.16) либо (2.17)-(2.24).
В силу большой размерности решение задач (2.16) и (2.17)-(2.24) извест-
ными методами нелинейного программирования представляется весьма за-
труднительным. Поэтому c учетом специфики данных задач для их решения
может оказаться эффективным применение двойственного итерационного ме-
тода [7]. Данный алгоритм является универсальным методом решения задачи
отыскания закона управления и соответствующих ему фазовых траекторий
таких, чтобы процесс не выходил бы за пределы заданных ограничений, с
одновременной минимизацией некоторого критерия. Он опирается на доста-
точные условия оптимальности управляемых процессов, которые являются
эффективными в том случае, если может быть найдена некоторая функция ϕ
состояния процесса, обладающая рядом специальных свойств.
3.1. Двойственный метод оптимизации многошаговых процессов
Прежде чем представить вычислительный алгоритм, напомним основные
конструкции двойственного метода глобального улучшения В.Ф. Кротова
[7, 9]. Для сохранения терминологии статьи [7] в данном пункте принятые
ранее обозначения временно переопределяются.
Рассмотрим управляемый процесс, характеризуемый дискретным аргу-
ментом t, состоянием y и управлением u, причем t = 0, N - 1, y ∈ Y = Rn,
117
u ∈ U ⊂ Rm, и удовлетворяющий уравнению
(3.1)
y(t + 1) = f(t, y(t), u(t)), y(0) = y0, yi(N) = bi
,
i = 1,r ≤ n.
Такие процессы будем называть допустимыми, а их множество обозначим
через D. Определим на множестве E = {(y(t), u(t)) : yRn, u ∈ U} функционал
вида
∑
(3.2)
J = f0
(t, y(t), u(t)) + F (N, y).
t=0
Требуется найти последовательность {ys(t), us(t)} элементов из E, сходящую-
ся к D и минимизирующую J на D:
(3.3)
J (ys, us) → d = inf
J.
D
Определим в соответствии с [7] класс функций ϕ(t, y) ∈ Π и следующие
конструкции:
(3.4)
R(t, y, u) = ϕ(t + 1, f(t, y, u)) - ϕ(t, u) - f0
(t, y, u),
(3.5)
G(N, y) = ϕ(N, y) + F (N, y),
∑
(3.6)
L = G(N,y) - R(t,y,u) - ϕ(0,y0
),
t=0
∑
(3.7)
l = min G(N,y) -
maxR(t, x, u) - ϕ(0, y0
).
yr+1,...,y
n
y,u
t=0
Справедливы следующие утверждения [7].
Лемма 1. ∀ ϕ ∈ Π:
1) L(y, u) = J(y, u), если (y, u) ∈ D,
2) l(ϕ) ≤ d.
Теорема 1. Если (y,u) ∈ D и ϕ ∈ Π такие, что L(ϕ,y,u) = l(ϕ), то
J (y, u) = min J(y, u) ≡ d = l(ϕ) = max l(ϕ).
Π
Процесс (y, u), удовлетворяющий условиям теоремы, называется опти-
мальным. Для его отыскания будем строить последовательность {ϕs} ∈ Π
начиная с производной ϕ0, на которой l(ϕs) → max l(ϕ).
Π
Будем искать ϕs+1 в виде
(3.8)
ϕs+1(t, y) = ϕs(t, y) + λsγs(t, y),
где λs > 0, γs(t, y) - подлежащие определению скаляр и функция.
Определим функционал вида
∑
[
]
(3.9)
δs(y,u) = γs(N,b) -
γs(t + 1,f(t,y,u)) - γs(t,y)
- γs(0,y0
),
t=0
118
который можно переписать следующим образом:
(3.10)
∑[
]
∑
δs(y,u) =
γs(t,y) - γs(t,y(t) - z(t - 1))
+
γs(t,y)
t=tk+0
,
t=tk -0
t=1
t1=0, t2=N
где z(t) = y(t + 1) - f(t, y, u).
Для разности Δl = ls(λ) - ls можно показать, что
(3.11)
Δls(λ) = λδs(y(t),u(t)) + {Ls(y(t),u(t)) - ls
},
где (y(t), u(t)) ∈ Es(λ). Из уравнений (3.6), (3.7) следует неотрицательность
второго слагаемого в формуле (3.11).
Элементарная операция улучшения функции ϕs(t, y) состоит в построении
ϕs+1(t, y) в виде зависимости (3.8), где λs > 0 и γs выбираются произвольно,
так чтобы
(3.12)
δs
(y, u) > 0
хотя бы при одном значении (y, u) ∈ Es+1 = Es(λs).
Из выражения (3.11) непосредственно следует, что элементарная опера-
ция (3.8) удовлетворяет неравенству
(3.13)
Δls = ls+1 - ls
> 0,
поэтому может использоваться для построения улучшающей последователь-
ности {(ys, u - s)} : ls → d.
3.2. Применение двойственного глобального метода
к решению выпуклой задачи квадратичного программирования
с сепарабельным функционалом
С учетом специфики данных задач для решения их описанным выше ите-
рационным методом [7] необходимо провести их декомпозицию и представить
в виде дискретной задачи оптимального управления вида (3.1), (3.2).
Рассмотрим ЗКП следующего вида [12]:
∑
(3.14)
J (u) =
(c1hu2h + c0huh) -→ min,
u
h=1
∑
(3.15)
cihuh = bi
,
i = 1,n,
h=1
(3.16)
uminh ≤ uh ≤ umaxh
,
h = 1,N,
∥Cih∥, bi, C1h > 0, C0h, uminh, umaxh — заданные величины.
119
Она является выпуклой задачей квадратичного программирования с сепа-
рабельным функционалом1. В данном случае функционал представлен мно-
гочленом.
Задачу (3.14)-(3.16) можно представить в форме эквивалентной задачи
оптимизации многошагового процесса с одномерным аргументом t = 0, N,
скалярным управлением ut и состоянием xt ∈ Rn:
∑
(3.17)
J (u) =
(c1tu2t + c0tut) -→ min,
u
t=1
(3.18)
xi(t + 1) = xi(t) + ci(t)ut
,
i = 1,n, t = 0,N - 1,
(3.19)
xi
(0) = 0, i = 1, n,
xi(N) = bi, i = 1,n,
{
}
(3.20)
ut ∈ U =
ut : umint ≤ ut ≤ umaxt
Для решения поставленной задачи воспользуемся двойственным методом
оптимизации многошаговых процессов.
Зададим функцию u(t, x) в линейном виде
∑
(3.21)
ϕ(t, x) =
ψi(t)xi
i=1
и определим для нее конструкции (3.24) и (3.25)
∑[
]
R(t, x, u) =
ψi(t + 1) - ψi(t)
xi+
i=1
(3.22)
[
]
∑
+ ψi(t + 1)ci(t) - c0
ut - c1tu2t,
t
i=1
∑
∑
(3.23)
G(N, x) = ψi(N) xi = ψi(N) bi.
i=1
i=1
Пояснение:
(
)
R(t, x, u) = ψ
t + 1,f(t,x,u)
- u(t, x) - f0(t, x, u) =
∑
[
]
∑
[
]
= ψi(t + 1)
xi + ci(t)u(t)
- ψi(t)xi -
c1tu2t + c0tut
=
i=1
i=1
[
]
∑
∑
= xi [ψi(t + 1) - ψi(t)] +
ψi(t + 1)ci(t) - c0
- u2(t)c1t.
t
i=1
i=1
1 Многочлен f(x) называется сепарабельным, если его неприводимые множители не
имеют кратных корней.
120
Условие существования максимума по x и функции R(t, x, u) накладывает
на ϕ ∈ Π следующие условия (3.24), (3.26):
(3.24)
ψi(t + 1) - ψi(t) = 0, т.е. ψi(t + 1) = ψi(t) - ψi
= const.
Пояснение:
Данное положение вытекает из необходимого условия максимума
∂R
= ψi(t + 1) - ψi(t) = 0
∀i = 1,n,
∂xi
∑
∂R
(3.25)
= -2c1tu + ψi(t + 1)ci(t) - c0t
= 0.
∂u
i=1
Таким образом функция R не зависит от x:
⎧
⎨
umint,
ũ≤umint,
ut =
ũt,
umint < ũt < umaxt,
⎩
umaxt,
ũt ≥ umaxt,
(3.26)
n ψici(t) - c0t
ũt =i=1
2c1
t
Это также вытекает из необходимого условия максимума (см. выше).
Двойственный функционал (3.27) будет следующего вида:
∑
∑
{[
]
}
(3.27)
l(ψ) =
ψibi -
ψici(t) - c0t
ut(ψ) - c1tu2t(ψ)
i=1
t=0
Ставится задача:
⎧
⎪
l(ψ) -→ max,
⎨
ψ
∑
⎪
⎩ c
ihuh = bi, i = 1, n.
h=1
Функцию γ будем задавать в соответствии с (3.21) и (3.23):
∑
(3.28)
γ(t, x) =
νixi.
i=1
Тогда функция δs примет вид
(
)
∑
∑
(3.29)
δs(x,u) =
νi bi -
ci(t) ũt
i=1
t=0
121
Пояснение:
∑[
(
)]
∑
δs(x,u) =
γs(t,x) - γs
t,x(t) - z(t - 1)
+ γs(t,x) |t=tk+0t=t
=
k-0
t=1
t1=0
∑
[
(
)
]
= γs(N,b) -
γs
t + 1,f(t,x,u)
- γs(t,x)
- γs(0,x0) =
t=0{
(
)
(
)
= γs(N,b) - γs
1, f(0, x, u)
- γ(0,x) + γs
2, f(1, x, u)
-
}
(
)
-γs(1,x) + ... + γs
N,f(N - 1,x,u)
- γs(N - 1,x)
- γs(0,x0)-
−{ ... } = +γs(0,x) - γs(N,x) =
= γs(N,b) - γs(N,x) + γs(0,x) - γs(0,x0) =
∑
∑
∑
= νibi - νi ci(t) ut + 0 - νi0 =
i=1
i=1
t=0
i=1
(
)
∑
∑
= νi bi - ci(t) ut
i=1
t=0
Для того чтобы выполнялось условие элементарной операции, т. е. для
обеспечения δs > 0, положим
∑
(3.30)
νi = bi -
ci(t) ut.
t=0
Таким образом, можем записать следующий алгоритм построения мини-
мизирующей последовательности:
1 шаг: Задаемся произвольными значениями ψ0i .
2 шаг: ψs+1i = ψsi + λsνsi , где
λs = argmax ls+1(λ)
λ>0
ls+1(λ) = l(ψs+1) = l(ψs + λνs).
3 шаг: Если ls+1 - ls < ε, то выход из алгоритма, иначе переход ко второму
шагу.
3.3. Построение численного алгоритма прогнозирования.
Декомпозиция задачи
Декомпозиционными или блочными принято называть такие методы ре-
шения оптимизационной задачи, которые связаны с анализом составляющих
ее подзадач [17].
Членение на подзадачи осуществляется до начала процесса решения, при-
чем, как правило, выбор метода декомпозиции существенно зависит от этого
122
членения. Метод членения обычно реализуется в виде последовательности
итераций, на каждой из них производится независимый анализ отдельных
подзадач при фиксированных значениях параметров, связывающих подзада-
чи. От итерации к итерации значения этих параметров пересчитываются [18].
Обычно декомпозиционные методы приспособлены либо к вертикальному,
либо к горизонтальному членению задачи. В первом случае каждая подза-
дача охватывает все ограничения и часть переменных общей задачи, во вто-
ром — имеет место двойственная ситуация: отдельные блоки включают все
переменные и некоторые ее ограничения. Также существуют методы, которые
допускают одновременное использование вертикального и горизонтального
членения задачи, как например, метод, предложенный в [19].
В целевых функциях алгоритмов прогнозирования (2.16) и (2.17)-(2.24)
матрицы квадратичной формы помимо диагональных членов содержат так-
же коэффициенты при смешанных произведениях ri · sj. Для того, чтобы из-
бавиться от них и привести задачу к ЗКП с сепарабельным функционалом,
проведем декомпозицию: будем попеременн{ фиксировать оди} из векторов
ri и sj и решать последовательность задач
ЗКП1p(r), ЗКП2p(s)
:
1. Шаг 0. Задаем произвольно u0j, j = 1, N ;
ψ0}.
2. Шаг р. Решаем последовательно две задачи
⎧
⎪ЗКП1p : управление — upi = ri, sj = up-1j = fixe, ls -→max, ψp0
ψp-1;
⎨
ψs
⎪
⎩ЗКПp
: управление — up+1j = sj, rj = upi = fixe, ls+1 -→
max, ψp+10
ψp.
ψs+1
3. l
ψp+1) - l
ψp-1) < ϵ, то выход; иначе переход к п. 2.
Несмотря на то, что максимум двойственного функционала lp в каждой
из задач ЗКП1p, ЗКП2p не обеспечивает строгого выполнения ограничений —
равенств (уравнений процесса), для сходимости описанной и{ерационной про-
цедуры достаточно, чтобы для любого p выполнялось Up =
up : umin(up-1) ≤
}
≤up ≤umax(up-1)
= 0. Тогда будет иметь место улучшение lp(ψ), ∀p, что в
силу построения алгоритма и обеспечивает сходимость.
Далее рассмотрим применение данной итеративной декомпозиционной схе-
мы для решения задач в данной модели (очевидно, что задачи (2.13) и (2.14)
тривиально записываются в виде (3.14)-(3.16) и не требуют декомпозиции):
Задача (2.16)
ЗКП1p: Запишем задачу в терминах постановки (3.14)-(3.16):
uh = ri (h = i = 1,N), sj - fixe (N = n - число отраслей).
∑∑[
]2
(3.31)
c1h =
a0hjfh(tl)
,
h = 1,N;
j=1 l=1
∑∑[
]
(3.32)
c0h = 2
a0hj(1 + sjgj(tl)) - ahj(tl)
a0hjfj(tl
),
h = 1,N;
j=1 l=1
123
⎧⎛
⎞
⎪
∑
⎨
⎝ a0
⎠fh(t)xh · δih, i = 1,N (δih - символ Кронекера);
hj
(3.33)
cih =
j=1
⎪
⎩a0hi-N · fh(t), i = N + 1,2N, h = 1,N;
⎧
∑
⎪
⎪
αixi -
a0ij(1 + sjgj(t))xj, i = 1,N;
⎨
(3.34)
bi =
[
]
⎪
∑
(
)
⎪
⎩ βi-N -
a0m
1 + si-Ngi-N(t)
,
i = N + 1,2N;
i-N
m
{
}
ahj(t) - ahj · (1 + sjgj(t))
(3.35)
uminh = max
, h = 1,N;
j,fh(t)=0
fh(t)
{
}
ahj(t) - ahj · (1 + sjgj(t))
(3.36)
umaxh = min
, h = 1,N.
j,fh(t)=0
fh(t)
ЗКП2p: uh = sj (h = j = 1, N), ri - fixe.
∑∑[
]2
(3.37)
c1h =
a0ihgh(tl)
,
h = 1,N;
i=1 l=1
∑∑[
]
(3.38)
c0h = 2
a0ih(1 + rifi(tl)) - aih(tl)
a0ihgh(tl
),
h = 1,N;
i=1 l=1
⎧
⎨a0ihgh(t)xh, i = 1,N;
(
)
(3.39)
cih =
∑
⎩
a0
gh(t) · δi-N,h, i = N + 1,2N, h = 1,N;
mh
m=1
⎧
⎡
⎤
⎪
∑
⎪
αixi -⎣ a0
xj⎦(1 + rifi(t)), i = 1,N;
⎨
ij
j=1
(3.40)
bi =
⎪
∑
(
)
⎪
⎩βi-N - a0m,i-N
1 + rmfm(t)
,
i = N + 1,2N;
m=1
{aih(t) - a0ih · (1 + rifi(t))},h=1,N;
(3.41)
uminh = max
i,gh(t)=0
gh(t)
}
{aih(t) - a0ih · (1 + rifi(t))
(3.42)
umaxh = min
, h = 1,N.
i,gh(t)=0
gh(t)
Задача (2.17)-(2.24)
Декомпозиция данной задачи также основана на попеременном фиксиро-
вании одного из векторов ri, sj. Однако управление uh здесь имеет для каж-
124
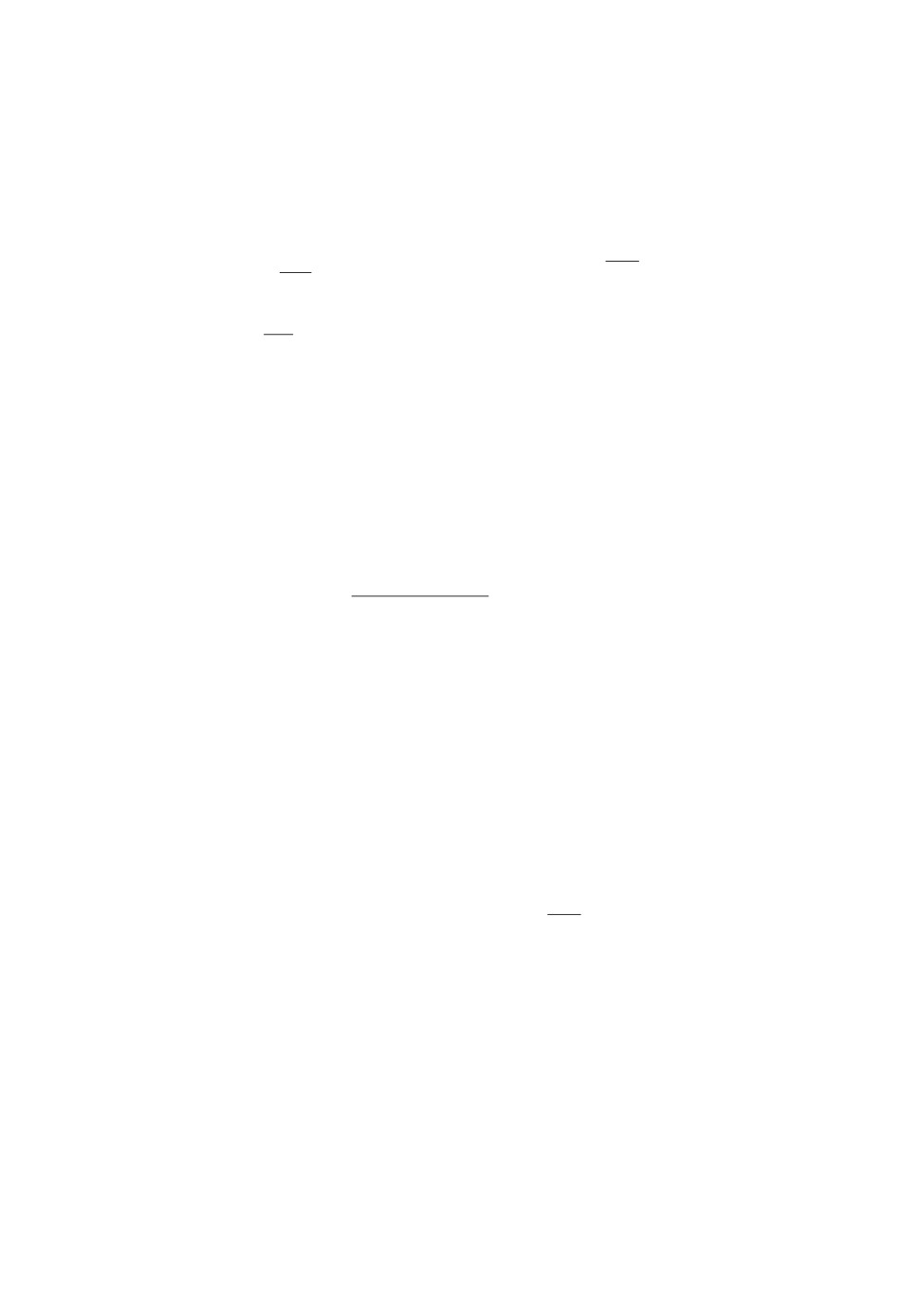
1
2
ЗКП
ЗКП
i = 1, n
i = n + 1, 2n
i = 2n + 1
r
S
Рис. 4. Представление задач в соответствии с компонентами управления uh =
= (r, α, β, γ), h = 1, N.
дой частной задачи не n, a N = 3n + 1 компонент: ЗКП1p : uh = {ri, vi, wj , u},
ЗКП2p : uh = {sj, vi, wj , u}.
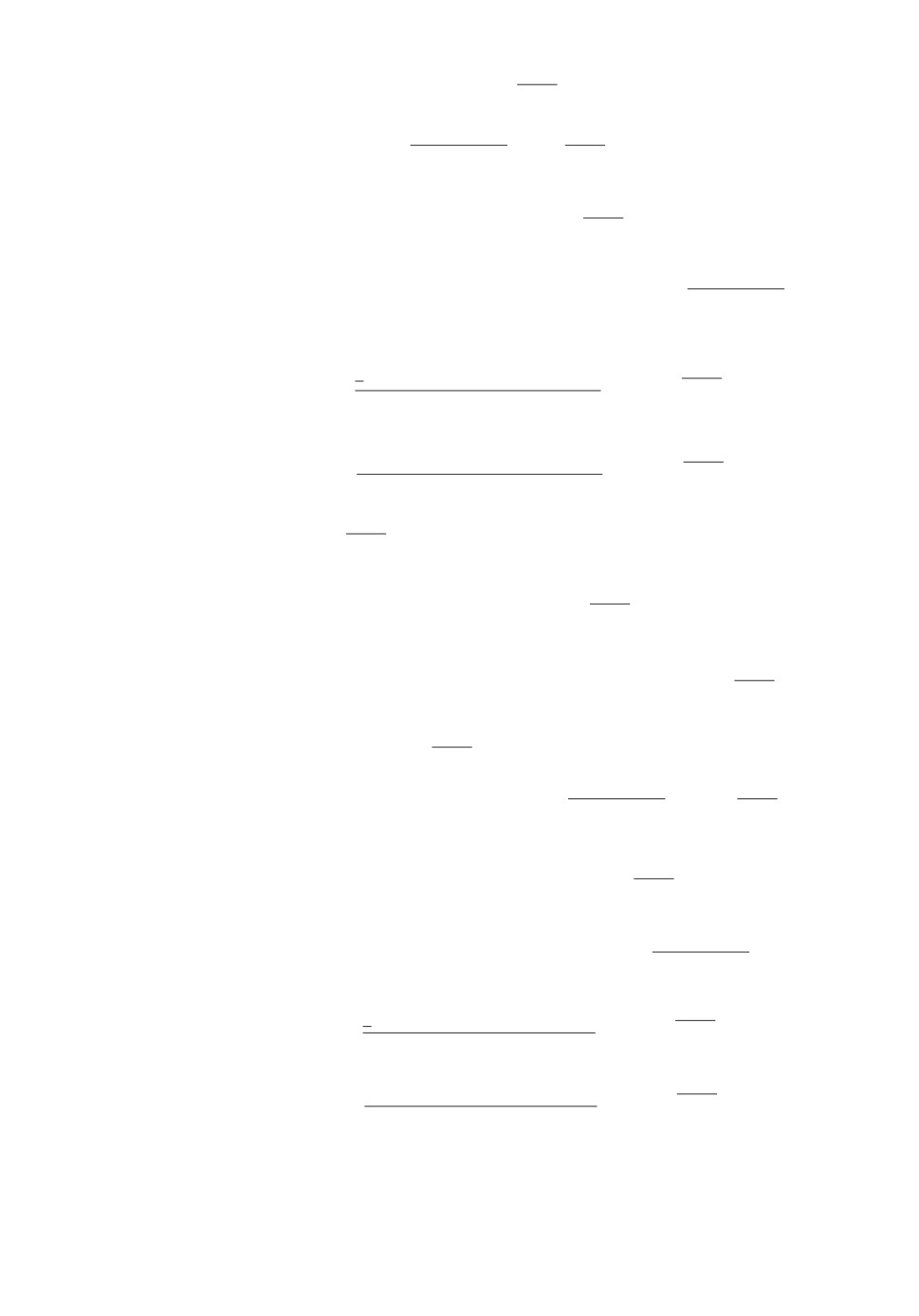
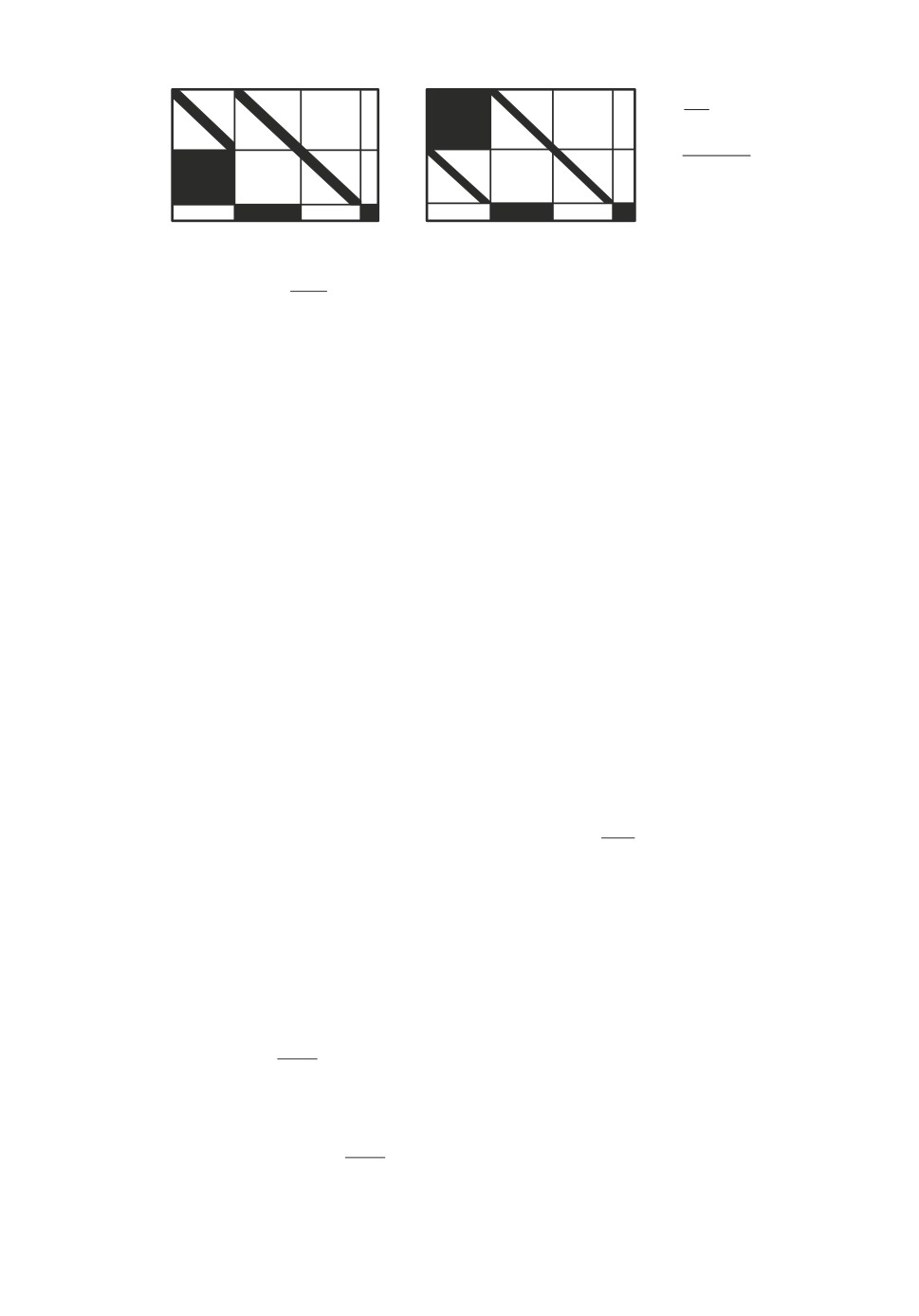
Структура матрицы системы линейных ограничений cih имеет вид, пока-
занный на рис. 4, где изображен вариант, когда вместо ограничения (2.22)
∑n
записано эквивалентное уравнение
vixi = u (n — общее число отраслей
i=1
в модели).
Формулы для коэффициентов c1h, c0h, cih, bi, αh, βh в данной задаче в отно-
шении первой составляющей переменной управления uh: ri или sj совпадают
с приведенными выше выражениями.
Остальные элементы перечисленных векторов и матрицы коэффициентов,
соответствующие компонентам vi, wj , u управления uh одинаковы для обеих
задач ЗКП1p, ЗКП2p и могут быть легко записаны непосредственно исходя из
формулировки задачи (2.17)-(2.24).
3.4. Реализация и функционирование алгоритма
Описанный выше декомпозиционный алгоритм инвариантен относительно
вида теоретической зависимости для âij(t) в рамках класса линейных двух-
параметрических функций времени вида
(3.43)
âij = σ1ijfij(t) + σ0ijgij
(t), i, j = 1, n.
Таким образом, помимо рассмотренной аддитивной формулы (2.15) мож-
но использовать различные кривые роста типа (3.43), применяемые обыч-
но в одномерном прогнозировании. Несмотря на существенное увеличение
при этом количества оцениваемых параметров (вместо 2n переменных ri,
sj - 2n2 переменных σ1ij, σ0ij), можно предположить, что быстродействие ал-
горитма практически не ухудшится. Это следует из того, что при декомпози-
ции σ1ij либо σ0ij становятся значениями управляющей переменной uh при h =
= i(n - 1) + j; h = 1, N; N = n2 + 2n + 1, а сложность задачи (3.17)-(3.18)
зависит не от N, а от размерности фазового вектора y, т.е. от общего числа
ограничений-равенств. Если также учесть в реализации алгоритма сильную
разреженность матрицы cih, то можно сократить вычислительные затраты
при суммировании по h = 1, N в несколько раз.
Что касается способов конкретизации зависимости (2.15), то функции fi(t)
и gj(t), которые должны отражать динамику окаймлений [16], можно непо-
125
средственно задавать в виде относительных темпов прироста соответствую-
щих долей vi, и wj :
vi(t1) - vi(t0)
wj(t1) - wj(t0)
(3.44)
fi(t1) =
, gj(t1) =
, i, j = 1, n, l = 1, k.
vi(t0)
wj(t0)
В задаче (2.17)-(2.24) для t1 = t величины vi, wj в (3.44) следует заменить
на их частные прогнозы vi(t), ŵj(t), û(t) и априорных ограничениий vi(t),
vi(t), wj (t), wj(t), u(t), u(t). В системе предусмотрены два способа.
1. Частные прогнозы определяются из рекуррентных формул
(
)
(
)
vi(t) =
1+δvi
vi(t - 1),
ŵj(t) =
1+δwj
wj(t - 1), û(t) = (1 + δu)u(t - 1),
где темпы прироста δvi , δwj , δu задаются пользователем, так же как и дина-
мика априорных ограничений. Для формирования последних предусмотрено
несколько видов кривых роста.
2. Частные прогнозы строятся с помощью подбора временных зависимо-
стей из заданного набора путем оценивания параметров по рядам статисти-
ческих наблюдений. Найденные параметры затем пользователь может кор-
ректировать для задания требуемых тенденций в прогнозном периоде. Огра-
ничения в данном случае формируются в виде «трубки»:
(
)
(
)
vi
1-Δvi
≤vi ≤vi
1+Δvi
,
(
)
(
)
ŵj
1-Δwj
≤wj ≤ ŵj
1+Δwj
,
û(1 - Δu) ≤ u ≤ û(1 + Δu)
с заданными величинами допустимых относительных отклонений Δvi , Δwj ,
иΔu.
Аналогично можно двумя способами формировать ограничения на aij.
1. Строятся частные прогнозыâij(t), например, в виде уравнения (3.43), и
тогда
aij(t) = (1 - Δij)âij(t),
aij(t) = (1 + Δij)âij(t), i,j = 1,n.
При решении задач согласования происходит уточнение параметров σ1ij,
σ0ij зависимости (3.43). Отметим, что для эффективного построения функ-
ций (3.43) требуется представительная динамика отчетных матриц {aij (t1)},
l = 1,K, где K ≥ 15 - 20.
2. В случае отсутствия длинных статистических рядов {aij (t)} можно
предложить в качестве частных прогнозов брать рекуррентные зависимости
(
)
âij(t) =
1+δaij
aij(t - 1) и строить «трубку» ограничений с помощью до-
пустимых отклонений Δij.
Для наиболее важных коэффициентов прямых затрат (их доля не превы-
шает 20%) можно жестко фиксировать плановые значения aij(t), т. е. Δij = 0.
В процессе функционирования алгоритма пользователь помимо указанных
экзогенных величин может управлять параметрами работы алгоритма θa, θy,
θw, θu, {εj} для достижения требуемой точности и обеспечения сходимости и
совместности решаемой задачи.
126
4. Заключение
На основе метода глобального улучшения В.Ф. Кротова в работе пред-
ложен вычислительный алгоритм для численного прогнозирования матри-
цы A(t) прямых затрат в рассмотренной динамической модели межотрасле-
вого баланса.
В описанных процедурах прогнозирования сочетается возможность
экспертно-аналитического формирования частных прогнозов показателей
промежуточного потребления с учетом требования их сбалансированности
и согласования со статической и модельной информацией. Данный подход
позволяет моделировать достаточно широкий спектр технологических изме-
нений в структуре материального производства.
Декомпозиция алгоритмов прогнозирования и применение для решения
задач квадратичного программирования (ЗКП) с выпуклым сепарабельным
функционалом двойственного метода оптимизации многошаговых процес-
сов [7], основанного на операции улучшения функции Кротова, дает возмож-
ность существенно увеличить быстродействие алгоритмов по сравнению с ис-
пользованием стандартных программ решения ЗКП общего вида.
Исследования, изложенные в данной статье, были начаты во время работы
автора в Институте проблем управления (ИПУ) РАН имени В.А. Трапезни-
кова в лаборатории 45 под руководством В.Ф. Кротова. Автор признателен
сотрудникам лаборатории А.Г. Александрову, О.В. Моржину и Л.А. Селива-
новой за обсуждение результатов и помощь в работе.
СПИСОК ЛИТЕРАТУРЫ
1. Leontief W.W. Input-Output Economics. 2nd Ed. N.Y.: Oxford Univer. Press, 1986.
2. Оптимальное управление природно-экономическими системами / Под ред.
В.И. Гурмана, А.И. Москаленко. Новосибирск: Наука, 1980.
3. Кротов В.Ф. Исследование нелинейных оптимизационных моделей развития
многоотраслевой экономики. Ч. I-III // АиТ. 1981. № 10. C. 129-136; № 11.
C. 114-123; 1982. № 1. C. 114-122.
Krotov V.F. Investigation of Nonlinear Optimization Models of Growth in a
Multisectoral Economy. I-III // Autom. Remote Control. 1981. V. 42. No. 10.
P. 1385-1391; No. 11. P. 1524-1531; 1982. V. 43. No. 1. P. 91-98.
4. Эколого-экономическая стратегия развития региона / Под ред. В.И. Гурмана.
Новосибирск: Наука, 1990.
5. Моделирование социо-эколого-экономической системы региона / Под ред.
В.И. Гурмана, Е.В. Рюминой. М.: Наука, 2003.
6. Proops J., Safonov P. Modeling in Ecological Economics / Edward Elgar Publ.
U.K., 2004.
7. Кротов В.Ф. Вычислительные алгоритмы решения и оптимизации управляе-
мых систем уравнений I, II // Изв. АН СССР. Техн. кибернетика. 1975. № 5,
№ 6.
8. Кротов В.Ф., Фельдман Н.Н. Итерационный метод решения задач оптималь-
ного управления // Изв. АН СССР. Техн. кибернетика. 1983. № 2. С. 160—168.
9. Krotov V.F. Global Methods in Optimal Control Theory. N.Y.: Marcel Dekker,
1996.
127
10. Гурман В.И., Матвеев Г.А., Трушкова Е.А. Социо-эколого-экономическая мо-
дель региона в параллельных вычислениях / Управление большими системами.
Сб. тр. Вып. 32. М.: ИПУ РАН, 2011. С. 109-130.
11. Расина И.В., Блинов А.О., Гусева И.С. Магистрали в задаче оптимизации стра-
тегии развития региона на многокомпонентной модели // Вест. Бурят. гос. ун-
та. Сер. 9. Математика и информатика. 2011. С. 36-42.
12. Сафонов П.И. Алгоритм прогнозирования прямых затрат в динамической
модели межотраслевого баланса / Вопросы создания АСПР. Применение
экономико-математических методов в перспективном планировании. Сб. научн.
трудов ГВЦ Госплана СССР. М.: 1988. Вып. 87. С. 118-138.
13. Николаева И.Г., Новикова Т.А. Метод статистического прогнозирования пря-
мых затрат / Прикладные задачи экономического моделирования. Вып. 13. М.:
ВНИИСИ, 1984.
14. Николаева И.Г. Анализ и прогноз межотраслевых связей. М.: Экономика, 1981.
15. Stone R., Brown J.A.C. A Long-Term Growth Model of the British Economy //
Eur. Future Figures. Amsterdam, 1962.
16. Седелев Б.В., Журавлева Л.В. Сбалансированный прогноз структурно-дина-
мических компонент макроэкономических процессов. Прикладные задачи эко-
номического моделирования / Сб. тр. ВНИИСИ. М., 1984. Вып. 13. С. 87-95.
17. Ляшенко И.Н. и др. Агрегирование и декомпозиция в моделях народнохозяй-
ственного планирования. Киев: Знание, 1980.
18. Овсеенко О.А., Шемякина Т.Ю. Методы декомпозиции процессов управления.
М.: МИУ, 1986.
19. Гольштейн Е.Г. Метод декомпозиции задач линейного и выпуклого програм-
мирования / Экономика и мат. методы. М., 1985. Вып. 6. Т. 21.
Статья представлена к публикации членом редколлегии М.М. Хрусталевым.
Поступила в редакцию 14.02.2017
После доработки 25.07.2018
Принята к публикации 08.11.2018
128