Автоматика и телемеханика, № 9, 2019
© 2019 г. М.М. ЧАЙКОВСКИЙ, д-р техн. наук (mmtchaikovsky@hotmail.com),
(Научно-производственный центр автоматики и приборостроения
им. акад. Н.А. Пилюгина;
Институт проблем управления им. В.А. Трапезникова РАН, Москва),
В.Н. ТИМИН, канд. техн. наук (timin.victor@rambler.ru),
А.П. КУРДЮКОВ , д-р техн. наук
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
СИНТЕЗ АНИЗОТРОПИЙНОГО СУБОПТИМАЛЬНОГО
ПИД РЕГУЛЯТОРА ДЛЯ ДИСКРЕТНОЙ ЛИНЕЙНОЙ
СТАЦИОНАРНОЙ СИСТЕМЫ: ОДНОМЕРНЫЙ СЛУЧАЙ1
Рассматривается задача синтеза пропорционально-интегрально-диф-
ференциального закона управления (ПИД регулятора) для дискретной
линейной стационарной системы с одномерными входом управления и из-
меряемым выходом, работающей под воздействием стохастических воз-
мущений, неопределенность которых описывается в терминах средней
анизотропии. Возможности замкнутой системы по подавлению возмуще-
ний количественно характеризуются анизотропийной нормой. Получены
достаточные условия существования анизотропийного субоптимального
ПИД регулятора, стабилизирующего замкнутую систему и гарантирую-
щего, что ее анизотропийная норма строго ограничена заданным порого-
вым значением.
Ключевые слова: ПИД регулятор, средняя анизотропия, норма, субопти-
мальное управление, выпуклая оптимизация.
DOI: 10.1134/S0005231019090113
1. Введение
Имя Якова Залмановича Цыпкина, академика РАН, выдающегося совет-
ского и российского ученого в области автоматического управления, столет-
нему юбилею которого посвящен этот номер журнала, широко известно в
нашей стране и за рубежом. Его классические статьи о системах с запазды-
вающей обратной связью, об импульсном регулировании и релейных системах
управления являются основополагающими в теории автоматического управ-
ления. Невозможно переоценить роль Якова Залмановича в теории адаптив-
ных и обучающихся систем управления. Работы В.Л. Харитонова о робаст-
ной устойчивости в свое время вызвали всплеск научной активности в этой
области. Я.З. Цыпкин вместе с Б.Т. Поляком, основываясь на результатах
А.В. Михайлова, положил начало новому методу в исследованиях по робаст-
ному управлению. Один из авторов этой статьи хорошо помнит круглый стол,
1 Работа выполнена при частичной финансовой поддержке Программы № 15 ОЭММПУ
РАН и Российского фонда фундаментальных исследований (проект 17-08-00185).
156
который вел Яков Залманович на 11-м Всемирном конгрессе ИФАК в Тал-
лине в 1990 г., на котором Яков Залманович провозгласил эру робастности в
теории управления.
Предлагаемая читателям статья посвящена дальнейшему развитию ани-
зотропийной (стохастической робастной) теории управления, предложенной
в 1990-е гг. И.Г. Владимировым, в которой идеи H∞ теории управления со-
четались с теоретико-информационными критериями качества (см., напри-
мер, [1-4]).
Зная живой интерес Якова Залмановича к этой области исследований, ав-
торы первой в российской печати работы по анизотропийной теории [1] при-
шли к нему и попросили дать отзыв в журнал “Доклады Академии наук”.
Яков Залманович просмотрел работу и попросил принести отзывы от спе-
циалистов. Авторы статьи [1] показали работу М.С. Пинскеру и А.Ю. Вере-
тенникову и получили достаточно лестные отзывы. Яков Залманович, озна-
комившись с отзывами, написал рекомендацию в ДАН. Эта статья вышла
в 1995 г. Таким образом он благословил анизотропийную теорию, которой
сейчас посвящено около сотни публикаций (книг, статей в ведущих научных
журналах у нас в стране и за рубежом) на право занять достойное место в
теории управления.
Анизотропийная теория стохастического робастного управления, основы
которой были заложены в [1-3], направлена на синтез управления, обладаю-
щего большей робастностью по отношению к статистически неопределенным
коррелированным возмущениям, чем гауссовское линейно-квадратичное и H2
управление, и в то же время меньшей консервативностью, чем H∞ управле-
ние. В анизотропийной теории статистическая неопределенность многомерно-
го сигнала — последовательности случайных векторов — описывается в тер-
минах анизотропии (для конечной последовательности) или средней анизо-
тропии (для бесконечной последовательности), представляющих собой меру
отклонения данного сигнала от центрированного гауссовского белого шума с
единичной ковариационной матрицей, а возможности системы по подавлению
неопределенных стохастических возмущений количественно характеризуют-
ся ее анизотропийной нормой [1, 2, 4].
Изначально анизотропийный оптимальный регулятор, задача синтеза ко-
торого была решена в [3], представлял собой регулятор в форме наблюдате-
ля. Критерий ограниченности анизотропийной нормы заданным значением,
сформулированный в [5] в терминах матричных неравенств, позволил приме-
нить методы выпуклой оптимизации и технику линейных матричных нера-
венств (ЛМН) к решению задач анизотропийного субоптимального управле-
ния, что привело к дальнейшему развитию анизотропийной теории. Приме-
нение новой техники дало возможность строить анизотропийные регуляторы
не только в форме наблюдателя, но и в форме динамических компенсаторов
заданного или полного порядка, а также в виде статических обратных связей
по состоянию и измеряемому выходу. В настоящей статье впервые рассматри-
вается задача анизотропийного субоптимального управления — подавления
неопределенных стохастических возмущений с ограниченной средней анизо-
тропией — с помощью регулятора не только заданного порядка, но и заданной
структуры.
157
Пропорционально-интегрально-дифференциальный (ПИД) регулятор от-
носится к наиболее распространенному типу регуляторов. Более 90 % регу-
ляторов, применяющихся в промышленности, используют ПИД алгоритм [6].
Причиной столь высокой популярности является простота построения и про-
мышленного использования, ясность функционирования, пригодность для
решения большинства практических задач и низкая стоимость. Усилия мно-
гих и многих исследователей на протяжении десятилетий и в настоящее время
сосредоточены на создании и разработке новых методов синтеза и настройки
параметров ПИД регуляторов на основе новых современных теорий и с при-
менением различных критериев качества. Методам синтеза и настройки ПИД
регуляторов посвящено огромное количество публикаций, которое невозмож-
но даже обзорно охватить в рамках этой статьи.
Структура статьи следующая. В разделе 2 излагается постановка задачи.
В разделе 3 представлено решение задачи синтеза анизотропийного субоп-
тимального ПИД регулятора. В разделе 4 рассматривается вычислительный
пример. Заключительные замечания даны в разделе 5.
В статье используются следующие обозначения: Rn - множество веще-
ственных n-мерных векторов, Rn×m - множество вещественных (n × m)-мат-
риц. Для вещественной матрицы M = [mij ] MT - транспонированная мат-
рица, MT := [mji]. Для вещественных симметричных матриц M = MT и
N = NT M ≻ N (или M ≽ N) означает, что матрица M - N положительно
(или неотрицательно) определена. В блочно-симметричных матрицах сим-
вол ∗ заменяет блоки, вид которых определяется симметрией. Единичная
матрица размерности n × n обозначается через In, нулевая матрица размер-
ности n × m обозначается 0n×m. Размерности нулевых матриц в тех случаях,
когда их нетрудно понять из контекста, указываться не будут. Определитель
матрицы M = [mij ] обозначается через det M, след этой матрицы обозначает-
ся через tr M. Евклидова норма вектора обозначаются через | · |. Символом E
обозначено математическое ожидание случайной величины.
2. Постановка задачи синтеза анизотропийного субоптимального
ПИД регулятора
Рассмотрим объект управления, представленный в пространстве состоя-
ний дискретной линейной стационарной моделью P (z) с nx-мерным состояни-
ем X = (xk), mw-мерным входом возмущения W = (wk), одномерным входом
управления U = (uk), uk ∈ R1, pz-мерным регулируемым выходом Z = (zk) и
одномерным измеряемым выходом Y = (yk), yk ∈ R1 :
⎡
⎤
⎡
⎤⎡
⎤
xk+1
A Bw Bu
xk
⎦= ⎣
⎦⎣
⎦,x0
(2.1)
P (z) : ⎣ zk
Cz Dzw
0
wk
= 0,
yk
Cy Dyw
0
uk
где размерности всех матриц согласованы, pz ≤ mw, пара матриц (A, Bu) яв-
ляется стабилизируемой, а пара (A, Cy) — детектируемой.
158
Предполагается, что средняя анизотропия последовательности возмуще-
ния W не превосходит известного положительного уровня a, т.е.
{
}
W ∈ Wa := W ∈ ℓmwP: A(W) ≤ a,a > 0,
где
∫
π
)
1
(mwS(ω)
A(W ) = -
ln det
dω
4π
∥W ∥2
P
-π
— функционал средней анизотропии [3, 4];
{
}
(2.2)
ℓmwP:=W=(wk)
: wk ∈ Lmw2 и∥W∥P < +∞
−∞<k<+∞
— пространство стационарных в узком смысле последовательностей случай-
ных векторов, интегрируемых с квадратом;
(
)1/2
M
1
(2.3)
∥W ∥P := lim
E|wk|2
M→∞ 2M + 1
k=-M
— мощностная норма последовательности случайных векторов W [7], которая
может быть вычислена через спектральную плотность S(ω) этой последова-
тельности:
⎛
⎞
π
1/2
∫
∥W ∥P =⎝1
tr S(ω)dω⎠
2π
−π
Рассматриваемая в данной статье задача управления заключается в ста-
билизации замкнутой системы и обеспечении некоторого желаемого качества
подавления случайных возмущений. Для решения этой задачи будет исполь-
зоваться пропорционально-интегрально-дифференциальный закон управле-
ния — ПИД регулятор. Известно достаточно много структур ПИД регулято-
ров [6]. Модель идеального (теоретического) ПИД регулятора как системы с
непрерывным временем описывается передаточной функцией
1
(2.4)
K(s) = Kp + Ki
+Kd
s,
s
где s — переменная преобразования Лапласа, Kp, Ki и Kd — коэффициенты
усиления пропорциональной, интегрирующей и дифференцирующей состав-
ляющих регулятора соответственно. При переходе к дискретному времени с
постоянным шагом Δt = T с заменой операции дифференцирования взятием
левой конечной разности, что в комплексной области соответствует замене
159
переменной преобразования Лапласа s :=z-1Tz , передаточная функция иде-
ального ПИД регулятора примет вид
z
Kd z - 1
(2.5)
K(z) = Kp + KiT
+
z-1
T z
Передаточная функция идеального ПИД регулятора (2.4) не является пра-
вильной (порядок числителя превышает порядок знаменателя), а идеальное
дифференцирующее звено невозможно реализовать, поэтому в практических
приложениях используется ПИД регулятор с передаточной функцией
1
s
(2.6)
K(s) = Kp + Ki
+Kd
,
s
αs + 1
где α — заданный малый постоянный параметр фильтра, заменяющего диф-
ференцирующее звено. При переходе к дискретному времени с использова-
нием замены s :=z-1Tz передаточная функция ПИД регулятора (2.6) примет
вид
z
z-1
b2z2 + b1z + b0
(2.7)
K(z) = Kp + KiT
+Kd
=
,
z-1
α(z - 1) + T z
a2z2 + a1z + a0
где
b2 := Kp(α - T) + Kd,
b1 := -Kp(2α + T) - KiT(α + T) - Kd,
(2.8)
b0 := Kpα - KiTα + Kd,
a2 := α + T,
a1 := -2α - T,
a0 = α.
Реализация передаточной функции (2.7) дискретного ПИД регулятора в
пространстве состояний в канонической управляемой форме имеет вид
[
]
[
][
]
xck+1
Ac Bc
xck
(2.9)
K(z) :
=
, xc0
= 0,
uk
Cc Dc
yk
где xck ∈ R2, uk ∈ R1, yk ∈ R1, а матрицы реализации определяются выраже-
ниями
⎡
⎤
⎡
⎤
0
1
0
⎦,
Ac =⎣
a0
a1
⎦,Bc = ⎣
1
-
-
-
(2.10)
a2
a2
a2
[
]
a0
a1
b2
Cc = b0 -
b2
b1 -
b2
,
Dc =
a2
a2
a2
Следует отметить, что в силу (2.8) элементы матриц ПИД регулятора Ac
и Bc не зависят от коэффициентов усиления Kp, Ki и Kd, а зависят лишь от
известных заданного параметра α и шага дискретного времени T.
160
Пусть Tzw(z) обозначает матричную передаточную функцию от внешнего
входа W к регулируемому выходу Z замкнутой системы с ПИД регулятором:
K(z)
(2.11)
Tzw(z) = Pzw(z) + Pzu(z)
Pyw
(z),
1 - Pyu(z)K(z)
где
Pzw(z) = Cz(zInx - A)-1Bw + Dzw, Pzu(z) = Cz(zInx - A)-1Bu,
Pyw(z) = Cy(zInx - A)-1Bw + Dyw, Pyu(z) = Cy(zInx - A)-1Bu,
а передаточная функция ПИД регулятора имеет вид (2.7).
Возможности замкнутой системы по подавлению стохастических возмуще-
ний W с уровнем средней анизотропии, не превышающим известного значе-
ния a, количественно характеризуются анизотропийной нормой передаточной
функции (2.11), определяемой как наибольшее отношение мощностной нормы
выхода этой системы к мощностной норме входа:
∥Z∥P
(2.12)
|||Tzw|||a := sup
W ∈Wa ∥W∥P
Постановка задачи синтеза анизотропийного субоптимального ПИД регуля-
тора для стабилизации объекта управления под воздействием стохастических
возмущений формулируется следующим образом.
Задача управления. Для заданных объекта управления c передаточ-
ной функцией
[
]
Pzw(z) Pzu(z)
(2.13)
P (z) =
Pyw(z) Pyu(z)
и моделью в пространстве состояний (2.1), уровня средней анизотропии
a > 0 стохастического возмущения W и некоторого желаемого порогово-
го значения γ > 0 найти коэффициенты усиления Kp, Ki и Kd ПИД регу-
лятора с передаточной функцией (2.7) и моделью в пространстве состоя-
ний (2.9), (2.10), такие чтобы замкнутая система (2.11) была асимптоти-
чески устойчива, а ее анизотропийная норма была строго ограничена поро-
говым значением γ, т.е. чтобы выполнялось условие
(2.14)
|||Tzw|||a
< γ.
3. Решение задачи синтеза анизотропийного субоптимального
ПИД регулятора
Для решения поставленной задачи управления воспользуемся тем, что
от искомых неизвестных коэффициентов усиления ПИД регулятора Kp, Ki
и Kd зависят лишь матрицы Cc и Dc его реализации в пространстве состоя-
ний (2.9). Это позволяет дополнить вектор состояния системы (2.1) состоя-
ниями регулятора (2.9) и в дальнейшем рассматривать в качестве объекта
161
управления расширенную модель с матрицами реализации
⎡
⎤
A
0
Bw Bu
⎡
⎤
⎢
⎥
BcCy Ac BcDyw
0
⎢
⎥
A Bw Bu
⎢
⎥
⎢
⎥
(3.1)
⎣ Cz Dzw
0
⎦ :=
Cz
0
Dzw
0
⎢
⎥,
Cy Dyw
0
⎢
⎥
⎣
0
I2
0
0
⎦
Cy
0
Dyw
0
а в качестве синтезируемого закона управления — статическую обратную
связь по выходу расширенной системы с коэффициентом усиления
[
]
[
]
(3.2)
K :=
Cc Dc
=
k0
k1
k2
,
представляющим собой матрицу-строку K ∈ R1×3. Нетрудно убедиться, что
матрицы реализации замкнутой системы Tzw в этом случае имеют вид
[
]
[
]
[
]
A B
A Bw
Bu
[
]
(3.3)
:=
+
K
Cy Dyw
=
C D
Cz Dzw
0
[
]
A+BuKCy Bw +BuKDyw
=
=
Cz
Dzw
⎡
⎤
A+BuDcCy BuCc Bw +BuDcDyw
⎢
⎥
=
⎣ BcCy
Ac
BcDyw
⎦.
Cz
0
Dzw
Далее отметим, что матрица-столбец Bu ∈ R(nx+2)×1, очевидно, имеет
полный ранг по столбцам, и следовательно существует невырожденная
матрица преобразования координат состояния расширенной системы Tu ∈
∈ R(nx+2)×(nx+2), такая что
[
]
1
(3.4)
Bu := TuBu =
0(nx+1)×1
В частности, эта матрица может быть выбрана в виде
[
]-1
(3.5)
Tu = Bu N
BTu
,
где столбцы матрицы NBT
образуют базис нуль-пространства матрицы BTu.
u
В новых координатах матрицы реализации расширенного объекта управле-
ния (3.1) имеют вид
(3.6)
A := TuAT-1u,
Bw := TuBw,
Cz := CzT-1u,
Cy := CyT-1u.
162
Решение поставленной задачи управления дано в следующей теореме,
устанавливающей достаточные условия существования ПИД регулятора, ста-
билизирующего замкнутую систему (2.11) и гарантирующего выполнение
условия (2.14).
Теорема. Для заданных a > 0 и γ > 0 ПИД регулятор (2.9), (2.10), ста-
билизирующий замкнутую систему (2.11) и гарантирующий выполнение
условия (2.14), существует, если система неравенств
(3.7)
η - (e-2a detΨ)1/mw < γ2,
⎡
⎤
Ψ-ηImw
∗
∗
⎢
⎥
(3.8)
⎣
Bw + LDyw
Φ
S
ST
∗
⎦ ≺ 0,
Dzw
0
-Ipz
⎡
⎤
-Φ
∗
∗
∗
⎢
⎥
⎢
0
-ηImw
∗
∗
⎥
(3.9)
⎢
⎥
≺ 0,
⎣
SA¯+
Cy
Bw + LDyw
Φ
S
ST
∗
⎦
C
z
Dzw
0
-Ipz
2
γ
(3.10)
Ψ ≻ 0,
Φ≻ 0, η > γ2, η ≤
,
1 - e-2a/mw
где
A
Bw
Cz
Cy определяются выражениями (3.6), разрешима относитель-
но скалярной переменной η, вещественных симметричных (mw × mw)-мат-
рицы Ψ, ((nx + 2) × (nx + 2))-матрицыΦ и двух структурированных мат-
ричных переменных
[
]
[
]
s1
01×(nx+1)
L1
(3.11)
S :=
,
L :=
S2
0(nx+1)×1
0(nx+1)×3
Если система неравенств (3.7)-(3.10) разрешима и неизвестные переменные
найдены, то матрица
[
]
1
(3.12)
K = k0 k1 k2
=
L1,
s1
а искомые коэффициенты усиления ПИД регулятора Kp, Ki и Kd вычисля-
ются как
⎡
⎤
⎡
⎤
⎤-1⎡
Kp
α
-Tα
1
k0 + k2α
⎢
⎥
⎢
⎥
⎢
⎥
(3.13)
⎣ Ki
⎦=
⎣ -2α - T
-Tα - T2 -1
⎦
⎣ k1 - k2(2α + T )
⎦,
Kd
α-T
0
1
k2(α + T)
где α — заданный малый постоянный параметр передаточной функции ПИД
регулятора (2.7), T — шаг дискретного времени.
163
Доказательство приводится в Приложении.
Следствие. Условия теоремы позволяют минимизировать γ := γ2 из
решения задачи выпуклой оптимизации
γ → inf
(3.14)
на множестве Ψ,Φ
S,L,η,γ,
удовлетворяющих ограничениям γ > 0 и (3.7)-(3.10).
Таким образом, решение задачи синтеза анизотропийного субоптимально-
го ПИД регулятора (задача вычисления его коэффициентов усиления) сво-
дится к задаче выпуклой оптимизации: минимизировать положительную пе-
ременную при ограничениях в виде системы неравенств, включающей нера-
венство относительно среднего геометрического собственных значений поло-
жительно определенной матрицы и двух линейных матричных неравенств.
4. Вычислительный пример
Рассмотрим простой вычислительный пример, в котором объектом управ-
ления является модель линейного осциллятора — математического маятника
[
[
]
][
]
[
]
[
]
x1(t)
0
1
x1(t)
0
0
(4.1)
=
+
w1(t) +
u(t)
x2(t)
-ω2
-2ξ
x2(t)
2
10
с частотой собственных колебаний ω = 8 и коэффициентом демпфирования
ξ = 0,01. Колебания линейного осциллятора (4.1) возбуждаются стохастиче-
ским внешним возмущением w1(t). Система (4.1) является устойчивой, но
переходные процессы в ней являются сильно колебательными и затухают
слишком медленно. Управление u(t) служит для стабилизации угла отклоне-
ния маятника x1(t) под воздействием возмущения w1(t).
Для синтеза закона управления (2.6) регулируемый выход непрерывной
модели линейного осциллятора (4.1) был выбран в виде z(t) = x2(t), а изме-
ряемый выход — в виде y(t) = x2(t) + 0,5w2(t), где w2(t) — шум измерений.
Непрерывная модель (4.1) была дискретизована с шагом дискретного време-
ни Δt = T = 10-3 секунды и приведена к виду (2.1), полученные матрицы
реализации дискретной модели объекта управления в пространстве состоя-
ний имеют вид
[
]
[
]
-3
0,999968
0,999979 · 10
0,999988 · 10-6
0
A=
,
Bw =
,
−0,063999
0,999948
0,199996 · 10-2
0
[
]
−5
0,499994 · 10
[
]
Bu =
,
Cz = Cy =
0
1
,
0,999979 · 10-2
[
]
Dzw = 0, Dyw =
0
0,5
Малый постоянный параметр α фильтра передаточной функции ПИД ре-
гулятора (2.6) был выбран равным 0,005. Передаточная функция K(s) была
164
дискретизована с шагом Δt = T = 10-3 секунды и приведена к виду (2.7), для
нее была получена реализация в пространстве состояний (2.9) с матрицами
[
]
[
]
0
1
0
Ac =
,
Bc =
−0,833333
1,833333
-166,666667
Модель объекта управления была расширена согласно (3.1), и для нее по
формуле (3.5) была построена невырожденная матрица преобразования ко-
ординат
⎡
⎤
0,500015 · 10-1
100,002042
0
0
⎢
⎥
⎢
−0,500004 · 10-3
0,250004 · 10-6
0
0
⎥
Tu =
⎢
⎥
⎣
0
0
1
0
⎦
0
0
0
1
Матрицы реализации расширенной модели объекта управления в простран-
стве состояний A, Bw, Cz и Cy были преобразованы по формулам (3.6).
Для ряда значений средней анизотропии возмущения a, перечисленных
в таблице, из решения задачи выпуклой оптимизации (3.14) по форму-
лам (3.12), (3.13) были рассчитаны коэффициенты усиления Kp, Ki и Kd
анизотропийного субоптимального ПИД регулятора. Расчеты при a → +∞
(H∞ субоптимальный ПИД регулятор) были выполнены из решения задачи
выпуклой оптимизации
(4.2)
γ → inf
на множестве
Φ
S,L, γ, удовлетворяющих ограничениям
⎡
⎤
¯
-
∗
∗
∗
⎢
⎥
⎢
0
-γImw
∗
∗
⎥
⎢
⎥
(4.3)
⎢
⎥ ≺ 0,
Φ
≻ 0,
γ > 0.
⎢
⎥
SA¯+
Cy
Bw + LDyw
Φ
S
ST
∗
⎣
⎦
C
z
Dzw
0
-Ipz
Все расчеты выполнялись в системе Matlab с использованием интерфейса
YALMIP и программы-решателя SDPT3 [8]. Результаты расчетов коэффи-
циентов усиления ПИД регулятора для различных значений a и сравнение
замкнутых систем с этими регуляторами сведены в таблицу.
Из анализа результатов решений оптимизационных задач для различных
значений уровня средней анизотропии возмущения a, приведенных в таблице,
можно заключить, что с ростом параметра a
• минимальное значение γmin, полученное при решении задачи выпуклой
оптимизации, увеличивается;
• вычисленное значение анизотропийной нормы замкнутой системы с со-
ответствующим ПИД регулятором увеличивается и не привышает значе-
ния γmin, полученного для того же уровня средней анизотропии возмуще-
ния a, т.е. все рассчитанные анизотропийные ПИД регуляторы являются
субоптимальными;
165
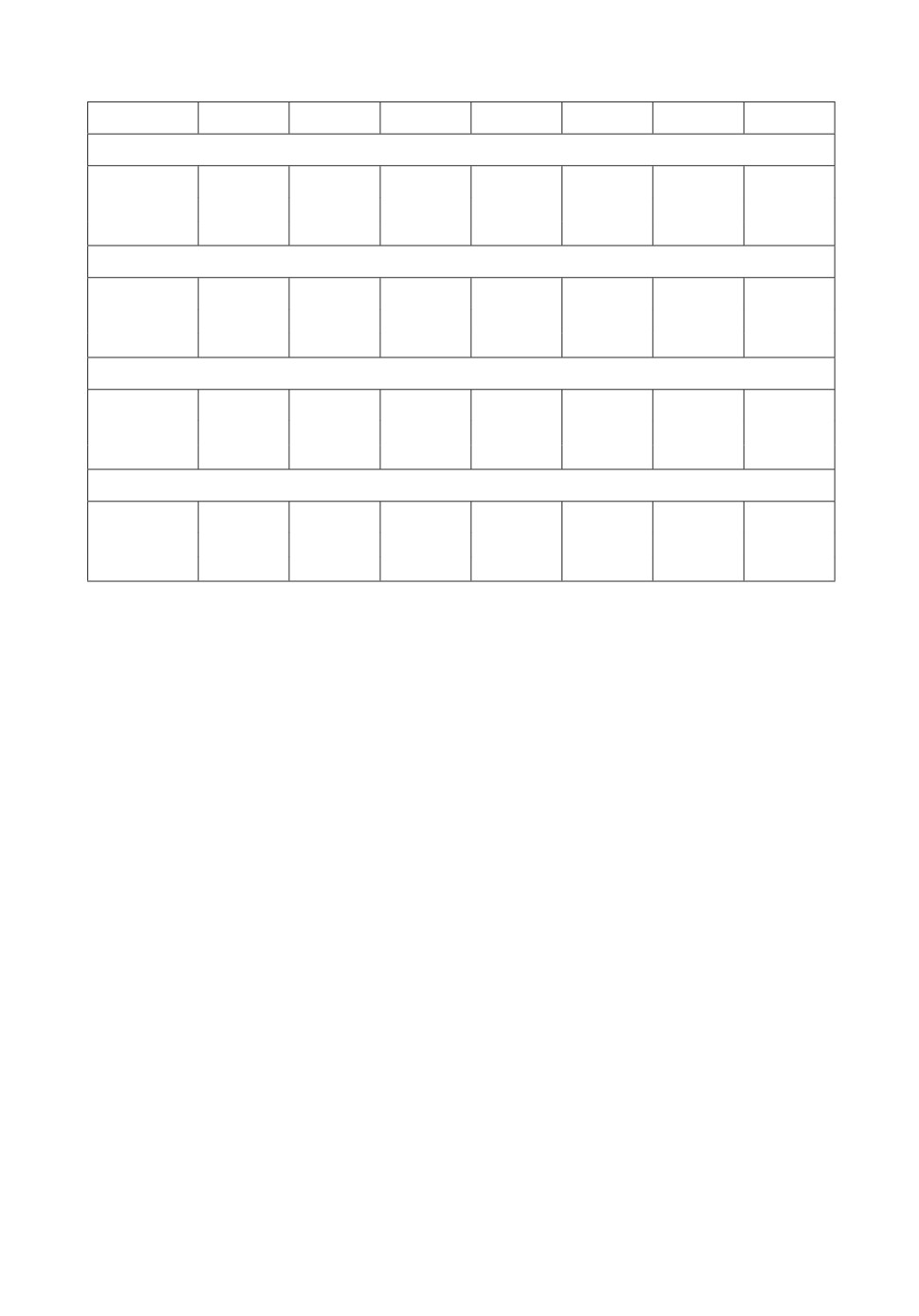
Сравнение замкнутых систем и параметров ПИД регуляторов, рассчитанных для
различных значений a
a
0,02
0,05
0,1
0,4
1,6
6,4
→ +∞
Результаты решения:
γmin
0,0841
0,1223
0,1647
0,2943
0,4496
0,49974
0,6585
|||Tzw|||a
0,0838
0,122
0,1643
0,2938
0,4493
0,49968
0,5
∥Tzw∥∞
0,5266
0,5154
0,5098
0,5035
0,5008
0,50001
0,5
Коэффициенты усиления ПИД регулятора:
Kp
-0,55125
-0,72652
-0,90904
-1,49915
-3,01166
-17,1849
-46,3446
Ki
-348,171
-458,875
-574,157
-946,886
-1902,03
-10854,1
-29267,6
Kd
-0,00493
-0,0065
-0,00813
-0,01341
-0,02695
-0,15376
-0,41463
Результаты моделирования для системы с анизотропийным ПИД регулятором:
maxk |uk|
4,41
5,88
6,325
8,997
14,318
10,44
22,09
maxk |x1,k|
0,339
0,323
0,33
0,326
0,344
1,39
2,17
maxk |x2,k|
2,28
1,98
1,66
1,25
1,602
1,49
1,97
Результаты моделирования для системы с H∞ ПИД регулятором:
maxk |uk|
302,63
320,92
290,95
214,993
116,92
34,2
22,09
maxk |x1,k|
0,0701
0,0944
0,128
0,0989
0,635
3,68
2,17
maxk |x2,k|
2,68
2,72
2,87
2,5
2,48
2,32
1,97
• вычисленное значение H∞ нормы замкнутой системы с соответствующим
анизотропийным ПИД регулятором уменьшается и стремится к H∞ норме
системы, замкнутой H∞ субоптимальным ПИД регулятором;
• коэффициенты усиления Kp, Ki и Kd анизотропийного субоптимального
ПИД регулятора увеличиваются и принимают наибольшие значения при
a → +∞, что соответствует H∞ субоптимальному ПИД регулятору.
Некоторые результаты моделирования движения замкнутых систем с ПИД
регуляторами, построенными для различных уровней средней анизотропии
возмущения a, также отражены в таблице, где для сравнения приводятся
аналогичные величины для системы, замкнутой H∞ субоптимальным ПИД
регулятором, на вход которой воздействуют возмущения с теми же уровнями
средней анизотропии. Из анализа данных таблицы можно заключить, что
• с ростом параметра a максимальные абсолютные амплитуды сигналов
управления, вырабатываемых соответствующими анизотропийными ПИД
регуляторами, также возрастают;
• при этом для всех значений a < +∞ амплитуды управляющих воздействий
анизотропийных регуляторов значительно меньше (для малых значений
средней анизотропии — в десятки раз) аналогичных показателей для за-
мкнутой системы с H∞ регулятором при тех же возмущениях;
• максимальные абсолютные значения регулируемой переменной — угловой
скорости математического маятника x2 — в замкнутых системах с анизо-
тропийными ПИД регуляторами для всех значений a < +∞ меньше ана-
логичных значений в замкнутой системе с H∞ регулятором при тех же
возмущениях;
166
a
б
10
10
5
w1 0
w1
0
5
10
10
0
2
4
6
8
10
0
2
4
6
8
10
t, c
t, c
6
4
4
2
2
w2
w2
0
0
2
2
4
4
0
2
4
6
8
10
0
2
4
6
8
10
t, c
t, c
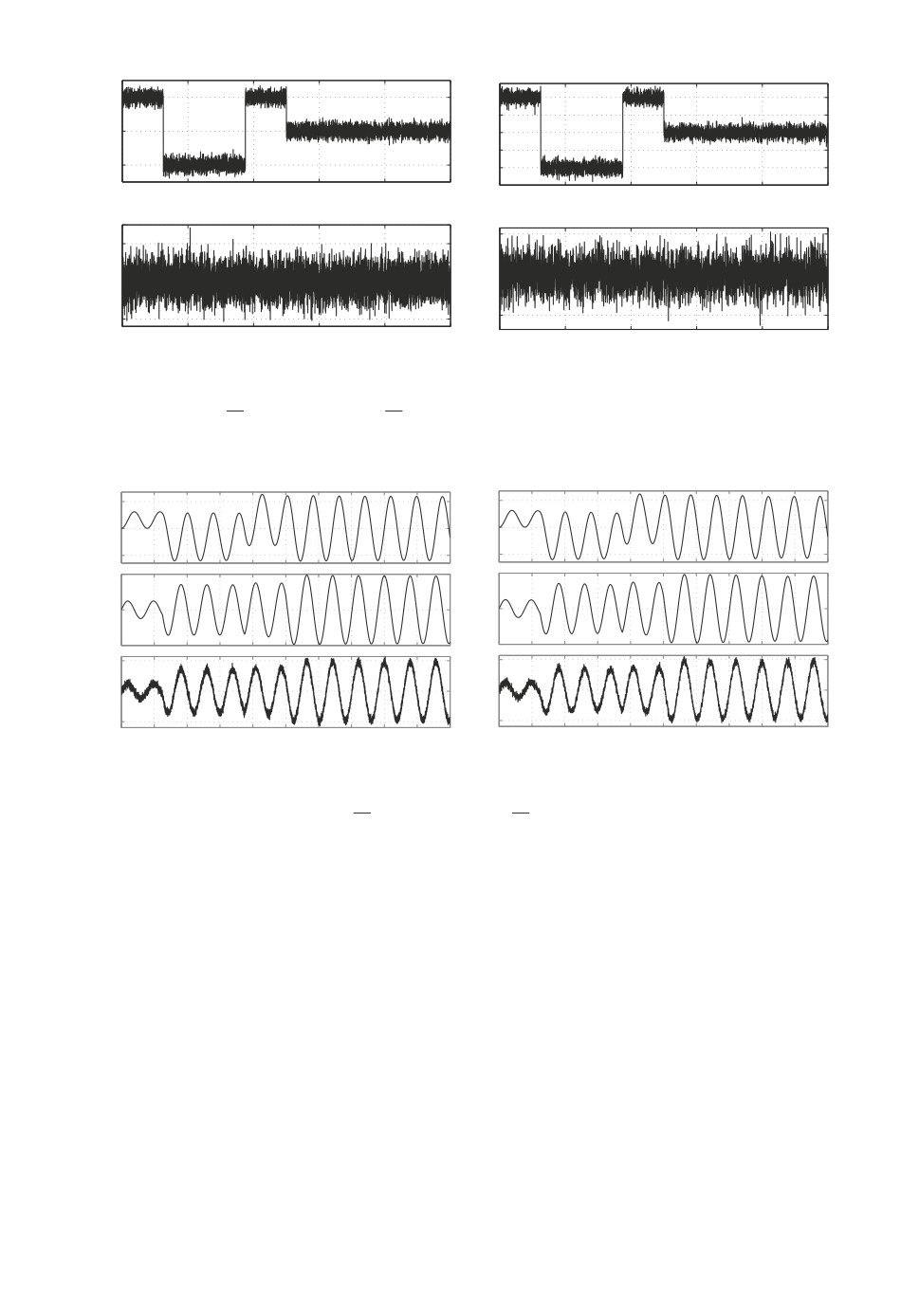
Рис. 1. Стохастические возмущения с различными уровнями средней анизо-
тропии: а — A(W ) = 0,1; б — A(W ) = 0,4.
a
б
1
1
x1
0
x1
0
1
1
10
10
x2
x2
0
0
10
10
10
10
y
0
y
0
10
10
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
t, c
t, c
Рис. 2. Реакция разомкнутой системы на возмущения с различными уровнями
средней анизотропии: а — A(W ) = 0,1; б — A(W ) = 0,4.
• несмотря на то что замкнутая система с H∞ регулятором демонстрирует
меньшие максимальные абсолютные значения угла отклонения математи-
ческого маятника — переменной x1 — для ряда возмущений с невысоким
уровнем средней анизотропии a, это достигается за счет совершенно несо-
поставимых энергетических затрат на управление по сравнению с анизо-
тропийными субоптимальными ПИД регуляторами.
Результаты моделирования для двух уровней средней анизотропии возмуще-
ния (a = 0,1 и a = 0,4) проиллюстрированы на рис. 1-4, на которых пред-
ставлены графики сигналов возмущений с данными уровнями средней ани-
зотропии, временные диаграммы переменных состояния и измеряемого вы-
хода разомкнутой системы при подаче на ее вход данных возмущений (при
нулевом входе управления), а также временные диаграммы переменных со-
стояния и сигналов управления в замкнутых системах с соответствующими
анизотропийными ПИД регуляторами и с H∞ регулятором.
167
a
б
0.2
0.2
x1
0
x1
0
0.2
0.2
1
1
x2
0
x2
0
1
1
5
5
u
0
u
0
5
5
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
t, c
t, c
Рис. 3. Реакция замкнутых систем с анизотропийными ПИД регуляторами,
построенными для различных a, на возмущения с соответствующими уровня-
ми средней анизотропии: а — A(W ) = 0,1; б — A(W ) = 0,4.
a
б
0.10
0.10
0.05
x
0.05
x1
1
0
0
0.05
2
2
x2
0
x2
0
2
2
200
200
u
0
u
0
200
200
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
t, c
t, c
Рис. 4. Реакция замкнутой системы с H∞ ПИД регулятором на возмущения
с различными уровнями средней анизотропии: а — A(W ) = 0,1; б — A(W ) =
= 0,4.
5. Заключение
Поставлена и решена задача синтеза анизотропийного субоптимального
пропорционально-интегрально-дифференциального (ПИД) закона управле-
ния для дискретной линейной стационарной системы с одномерными входом
управления и измеряемым выходом, подверженной воздействию неопреде-
ленного стохастического возмущения с ограниченной средней анизотропией.
Задача заключалась в нахождении трех коэффициентов усиления ПИД ре-
гулятора, таких чтобы замкнутая система была асимптотически устойчива и
анизотропийная норма ее передаточной функции от входа возмущения к регу-
лируемому выходу была строго ограничена заданным пороговым значением,
обеспечивая заданное качество подавление возмущения. При дискретизации
передаточной функции непрерывной модели выбранной формы ПИД регуля-
168
тора и при последующем переходе при его описании к модели в пространстве
состояний две матрицы реализации регулятора являются полностью извест-
ными и лишь две другие зависят от искомых неизвестных коэффициентов
усиления. Этот факт используется для решения поставленной задачи. Ис-
ходная модель объекта управления в пространстве состояний дополняется
известным вектором состояния ПИД регулятора, известные матрицы реали-
зации регулятора включаются в расширенную модель объекта, и для нее за-
дача нахождения неизвестных коэффициентов усиления становится задачей
синтеза закона управления в виде статической обратной связи по измеряе-
мому выходу. Последняя задача решается методами выпуклой оптимизации
и линейных матричных неравенств. Получены достаточные условия суще-
ствования анизотропийного субоптимального ПИД регулятора, а процедура
его синтеза сводится к решению системы неравенств, включающей неравен-
ство относительно среднего геометрического собственных значений положи-
тельно определенной матрицы и двух линейных матричных неравенств. При
этом возможна минимизация порогового значения, ограничивающего анизо-
тропийную норму передаточной функции системы, замкнутой ПИД регуля-
тором.
ПРИЛОЖЕНИЕ
Приведем лемму, применяемую в доказательстве теоремы.
Лемма. Для заданных a > 0 и γ > 0 передаточная функция замкнутой
системы Tzw с реализацией (3.3) устойчива и удовлетворяет условию (2.14),
если система неравенств
(Π.1)
η - (e-2a detΨ)1/mw < γ2,
⎡
⎤
⎡
⎤
-Φ
∗
∗
∗
Ψ-ηImw
∗
∗
⎢
⎥
⎢
⎥
⎢
0
-ηImw
∗
∗
⎥
(Π.2)
⎣ B
-Φ-1
∗
⎦ ≺ 0,
⎢
⎥
≺ 0,
⎣ A B
-Φ-1
∗
⎦
D
0
-Ipz
C
D
0
-Ipz
2
γ
(Π.3)
Ψ ≻ 0, Φ ≻ 0, η > γ2, η ≤
1 - e-2a/mw
разрешима относительно скалярной переменной η и вещественных симмет-
ричных (mw × mw)-матрицы Ψ и (n × n)-матрицы Φ, где n — порядок за-
мкнутой системы.
Доказательство леммы следует из теоремы 4 в [5].
Доказательство теоремы. Пусть решение системы неравенств
(3.7)-(3.10) существует, найдено и данные неравенства выполняются. Кон-
груэнтное преобразование неравенств (3.8), (3.9) с матрицами
blockdiag (Imw , TTu, Ipz ), blockdiag (TTu, Imw , TTu, Ipz )
169
соответственно приводит к линейным матричным неравенствам
⎡
⎤
Ψ-ηImw
∗
∗
⎢
⎥
⎣
u
STuBw + TTuLDyw TTu(Φ
S
ST)Tu
∗
⎦ ≺ 0,
Dzw
0
-Ipz
⎡
⎤
-TTu ΦTu
∗
∗
∗
⎢
⎥
⎢
0
-ηImw
∗
∗
⎥
⎢
⎥
≺ 0.
⎣ T
STuA + TTuLCy T
STuBw + TTuLDyw TTu(Φ
S
ST)Tu
∗
⎦
Cz
Dzw
0
-Ipz
Обозначим S := TTu
STu, Φ := TTuΦTu. Из выражений (3.4) и (3.12) следу-
ет, что Bu = T-1uB¯u, L1 = s1K. С учетом определения блочных матриц (3.11)
получаем
]
[
[
]
L1
s1K
(Π.4) TTuL = TTu
=TTu
=
0(nx+1)×3
0(nx+1)×3
[
][
]
s
1
01×(nx+1)
1
=TT
K =T
BuK = SBuK,
u
S2
0(nx+1)×1
0(nx+1)×1
и предыдущие ЛМН можно переписать в виде
⎡
⎤
Ψ-ηImw
∗
∗
⎢
⎥
⎣ S(Bw + BuKDyw) Φ - S - ST
∗
⎦ ≺ 0,
Dzw
0
-Ipz
⎡
⎤
-Φ
∗
∗
∗
⎢
⎥
⎢
0
-ηImw
∗
∗
⎥
⎢
⎥
≺ 0,
⎣ S(A + BuKCy) S(Bw + BuKDyw) Φ - S - ST
∗
⎦
Cz
Dzw
0
-Ipz
или в терминах матриц реализации замкнутой системы (3.3) — в виде
⎡
⎤
Ψ-ηImw
∗
∗
⎢
⎥
⎣ SB Φ - S - ST
∗
⎦ ≺ 0,
D
0
-Ipz
⎡
⎤
-Φ
∗
∗
∗
⎢
⎥
⎢
0
-ηImw
∗
∗
⎥
⎢
⎥
≺ 0.
⎣ SA SB Φ - S - ST
∗
⎦
C
D
0
-Ipz
Конгруэнтное преобразование этих неравенств с матрицами
blockdiag (Imw , S-1, Ipz ), blockdiag (Inx , Imw , S-1, Ipz )
170
соответственно приводит к неравенствам
⎡
⎤
Ψ-ηImw
∗
∗
⎢
⎥
(Π.5)
⎣ B
S-1ΦS-T - S-1 - S-T
∗
⎦ ≺ 0,
D
0
-Ipz
⎡
⎤
-Φ
∗
∗
∗
⎢
⎥
0
-ηImw
∗
∗
⎢
⎥
(Π.6)
⎢
⎥
≺ 0.
⎣ A B S-1ΦS-T - S-1 - S-T
∗
⎦
C
D
0
-Ipz
Поскольку Φ ≻ 0, то для любой обратимой матрицы S всегда выполняется
неравенство
(S-1 - Φ-1)(-Φ)(S-1 - Φ-1)T ≼ 0
и
(-S-1Φ + Inx+2)(S-1 - Φ-1)T = -S-1ΦS-T + S-T + S-1 - Φ-1 ≼ 0,
откуда следует, что
-Φ-1 ≼ S-1ΦS-T - S-1 - S-T,
т.е. при выполнении неравенств (3.7), (Π.5), (Π.6) и (3.10) выполняются нера-
венства (Π.1)-(Π.3), и в силу леммы передаточная функция замкнутой си-
стемы Tzw с реализацией (3.3) устойчива и удовлетворяет условию (2.14) по-
ставленной задачи управления. Выражения (3.13) для вычисления искомых
коэффициентов усиления ПИД регулятора Kp, Ki и Kd следуют из (2.8),
(2.10) и проверяются непосредственной подстановкой. Теорема доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Владимиров И.Г., Курдюков А.П., Семенов А.В. Анизотропия сигналов и эн-
тропия линейных стационарных систем // ДАН. 1995. № 3. C. 583-585.
Vladimirov I.G., Kurdyukov A.P., Semenov A.V. Anisotropy of Signals and Entropy
of Linear Stationary Systems // Doklady Math. 1995. V. 82. No. 3. P. 386-390.
2. Владимиров И.Г., Курдюков А.П., Семенов А.В. Стохастическая проблема H∞-
оптимизации // ДАН. 1995. Т. 343. № 5. C. 607-609.
Vladimirov I., Kurdyukov A., Semyonov A. The Stochastic Problem of H-infinity
Optimization // Doklady Math. 1995. V. 52. P. 155-157.
3. Vladimirov I.G., Kurdjukov A.P., Semyonov A.V. State-Space Solution to Anisotro-
py-Based Stochastic H∞-optimization Problem // Proc. 13th IFAC World Congr.,
San-Francisco, USA. 1996. P. 427-432.
4. Diamond P., Vladimirov I.G., Kurdyukov A.P., et al. Anisotropy-Based Performance
Analysis of Linear Discrete Time Invariant Control Systems // Int. J. Contr. 2001.
No. 74. P. 28-42.
171
5. Чайковский М.М., Курдюков А.П. Критерий строгой ограниченности анизотро-
пийной нормы заданным значением в терминах матричных неравенств // ДАН.
2011. Т. 441. № 3. C. 318-321.
Tchaikovsky M.M., Kurdyukov A.P. Strict Anisotropic Norm Bounded Real Lemma
in Terms of Matrix Inequalities // Doklady Math. 2011. V. 84. No. 3. P. 895-898.
6. Aström K.J., Hägglund T. Advanced PID control. Instrumentation, Systems, and
Automation Society: Research Triangle Park, NC, 2006.
7. Zhou K., Glover K., Bodenheimer B.A., et al. Mixed H22 and H∞ Performance
Objectives I: Robust Performance Analysis, II: Optimal Control // IEEE Trans.
AC. 1994. V. 39. P. 1564-1574, 1575-1587.
8. Löfberg J. YALMIP: A Toolbox for Modeling and Optimization in Matlab // Proc.
CACSD Conf. Taipei, Taiwan, 2004.
Статья представлена к публикации членом редколлегии А.В. Назиным.
Поступила в редакцию 28.06.2018
После доработки 09.09.2018
Принята к публикации 08.11.2018
172