Автоматика и телемеханика, № 1, 2020
Линейные системы
© 2020 г. В.Н. ОВЧАРЕНКО, д-р техн. наук (owcharenko.v@yandex.ru)
(Московский авиационный институт
(национальный исследовательский университет))
СТРУКТУРНО-ПАРАМЕТРИЧЕСКАЯ ИДЕНТИФИКАЦИЯ
ЛИНЕЙНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЫ
С ПОСТОЯННЫМИ ПАРАМЕТРАМИ
Рассматривается задача структурно-параметрической идентификации
стационарных линейных динамических систем. Предложен новый метод
структурно-параметрической идентификации динамической системы, ос-
нованный на построении множества слабоэквивалентных систем возрас-
тающей сложности. Под структурно-параметрической идентификацией
понимается оценка порядка дифференциальных уравнений, всех коэф-
фициентов, удовлетворяющих некоторым ограничениям, неизвестных на-
чальных условий и смещения измерителя. Решение задачи структурно-
параметрической идентификации получается за конечное число шагов.
На тестовом примере показано, что предложенный метод имеет высокую
чувствительность в условиях интенсивных измерительных ошибок.
Ключевые слова: структурная идентификация, параметрическая иденти-
фикация, линейные динамические системы.
DOI: 10.31857/S0005231020010018
1. Введение
Большое количество работ по структурной идентификации математиче-
ских моделей, появившихся в трудах различных конференций, семинаров,
монографиях и журналах указывает на значительный интерес специалистов
к этой проблеме и актуальность самой проблемы. Необходимость решения
проблемы структурной идентификации обусловлена различными причинами,
которые встречаются в процессе создания сложных технических систем [1].
Одной из таких причин является повышение точности вычисления оценок
неизвестных параметров по результатам ограниченного числа эксперимен-
тов. Вычисленные оценки параметров сравниваются с их априорными зна-
чениями, полученными либо расчетным путем, либо в полунатурных экспе-
риментах в полностью контролируемых условиях их проведения. Неприемле-
мые ошибки оценок неизвестных параметров, существенное отличие оценок
от их априорных значений указывают на несоответствие экспериментальных
данных структуре математической модели, принятой на этапе обработки ре-
зультатов эксперимента. Причиной несоответствия экспериментальных дан-
ных структуре математической модели могут быть скрытые, ненаблюдае-
мые переменные, влияющие на отклик динамической системы. Ненаблюдае-
мые переменные могут быть обусловлены изменением условий эксперимента
3
и их присутствие в каждом эксперименте не обязательно. Таким образом,
возникает проблема совместного определения параметров и структуры ма-
тематической модели по результатам натурного эксперимента, т.е. проблема
структурно-параметрической идентификации.
Л. Заде [2] связывает структурную идентификацию с понятием эквива-
лентности систем из выбранного класса систем. Одной из первых моногра-
фий, посвященных структурной идентификации линейных динамических си-
стем, была, по-видимому, [3], в которой был разработан метод типовой таб-
личной идентификации устойчивых динамических систем. Основой метода
является анализ оценок корреляционных функций пары вход — выход. Этот
метод давал решение задачи структурной идентификации для динамических
систем до третьего порядка включительно. Эквивалентность структур ди-
намических систем рассматривалась в терминах корреляционных функций
пары вход — выход. В [4, 5] с общих позиций рассматривается анализ проб-
лемы структурной идентификации и установлено, что ее успешное решение
сводится к разработке и обоснованию соответствующих критериев и алгорит-
мов. В монографии [6] предлагается метод оценки порядка линейной динами-
ческой системы, основанный на расширении входного пространства системы
введением вспомогательных переменных. В [7] анализируется структура мо-
дели в целях дальнейшего решения задачи параметрической идентификации.
Решение задачи параметрической идентификации динамических систем,
заданных дифференциальными уравнениями, традиционно проводится во
временной области и связано с необходимостью численного интегрирования
дифференциальных уравнений. Это может привести к дополнительным труд-
ностям решения задачи параметрической идентификации, обусловленным
динамическими характеристиками объекта и информационно-измерительной
системы. Поэтому иногда задачу параметрической идентификации целесооб-
разно решать частотными методами [8]. Частотные методы идентификации
были одними из первых методов идентификации математических моделей ди-
намических систем. Свойства стационарной линейной динамической системы
можно описать в терминах отношения амплитуд и сдвига фаз гармонических
сигналов на входе и выходе изучаемого объекта. К особенностям частот-
ных методов относятся: а) простота вычислений частотных характеристик
наблюдаемых переменных в присутствии измерительных шумов; б) возмож-
ность непараметрической идентификации структуры математической модели
в виде частотных характеристик; в) возможность независимого выбора то-
чек частотного диапазона для каждой пары входного и выходного сигналов;
г) возможность идентификации временных запаздываний в эксперименталь-
ных данных; д) возможность обобщения вычислительных алгоритмов иден-
тификации на многоканальные системы вход — выход и на нелинейные ди-
намические системы; е) возможность применения к идентификации неустой-
чивых динамических систем.
В [9-11] предложен частотно-временной метод параметрической иденти-
фикации, сочетающий в себе вычисления в частотной и во временной области
и позволяющий применить его к решению задачи структурно-параметриче-
ской идентификации линейных систем с постоянными коэффициентами. Но-
вый метод структурно-параметрической идентификации основан на сквозном
4
применении частотно-временного метода как для решения задачи параметри-
ческой идентификации, так и для решения проблемы структурной идентифи-
кации. В данной статье предложен новый метод структурной идентификации,
основанный на анализе свойств слабой эквивалентности линейных систем [12]
различной структуры. Проведенный анализ позволил предложить алгоритм
определения порядка системы дифференциальных уравнений на множестве
слабоэквивалентных динамических систем по наблюдаемой паре вход — вы-
ход на ограниченном интервале времени в присутствии измерительных помех.
Порядок динамической системы определяется за конечное число шагов.
На иллюстративном примере показано, что предложенный метод имеет
высокую чувствительность и позволяет выявить скрытые ненаблюдаемые
входные сигналы в условиях интенсивных инструментальных помех.
2. Постановка задачи структурно-параметрической идентификации
Рассмотрим устойчивую линейную стационарную непрерывную систему,
заданную дифференциальным уравнением n-го порядка на интервале време-
ни t ∈ [0, T ]
x(n) + an-1x(n-1) + an-2x(n-2) + ... + a1x(1) + a0x =
(1)
= bn-1u(n-1) + bn-2u(n-2) + ... + b1u(1) + b0u,
где x — скалярный выходной сигнал; u — скалярный входной сигнал, та-
кой что u(t) = const; x(k), u(k) — k-е производные; начальные условия x(k)0;
k = 0,1,...,n - 1 известны полностью или частично.
Наблюдается скалярная функция времени y(t), линейно связанная с про-
цессом x(t):
(2)
y(t) = x(t) + by
+ η(t),
где η(t) — стационарный случайный процесс с нулевым средним, описыва-
ет измерительный шум; by — неизвестное смещение измерителя на интерва-
ле [0, T ], обусловленное смещением нуля измерителя и/или конечным времен-
ным интервалом измерений (на этом интервале измеритель “шумит” несим-
метрично).
Обозначим через α = (an-1, . . . , a0), β = (bn-1, . . . , b0), χ = (x(n-1)0, . . . , x0) -
n-мерные векторы параметров и начальных условий уравнения (1). На вход-
ном сигнале u(t) наблюдается выход y(t) = y(t; α, β, χ), зависящий от век-
торов параметров, начальных условий и смещения, т.е. наблюдаемый вы-
ход y(t) является траекторией в (3n + 1)-мерном параметрическом простран-
стве. В общем случае на входной сигнал и параметры наложены ограничения
u ∈ U, (α,β) ∈ Θ.
Под структурно-параметрической идентификацией будем понимать реше-
ние следующей задачи.
Задача 1. На интервале [0,T] выполняется одиночный эксперимент.
Требуется по наблюдениям пары вход — выход (u(t),y(t)), t ∈ [0,T] опреде-
лить порядок n; все коэффициенты (α, β) ∈ Θ; неизвестные начальные усло-
вия χ системы (1) и смещение by в (2).
Дальнейший анализ ограничен системами конечного порядка.
5
3. Принцип оценки порядка динамической системы
Рассмотрим уравнения (1) и (2) при условиях by = 0, η(t) ≡ 0, а в каче-
стве пары вход — выход — (u, x). Принцип оценки порядка динамической
системы (1) по результатам единственного эксперимента на интервале [0, T ]
основан на фундаментальных свойствах линейных систем, к которым отно-
сится свойство эквивалентности двух и более систем [12]. Обозначим через Sn
линейную динамическую систему (1) порядка n; векторы α, β, χ имеют раз-
мерности, согласованные с порядком системы.
Определение 1. Система Sn является следствием системы Sm на ин-
тервале [0,T] (вложением в систему Sm), или Sn ⊂ Sm, если каждая пара
вход — выход (u, x) системы Sn является также парой вход — выход (u, x)
системы Sm.
Определение 2. Если система Sn является следствием системы Sm
на интервале [0,T], а система Sm является следствием системы Sn на том
же интервале, то системы Sn и Sm слабоэквивалентны Sn ≡ Sm (в условиях
одиночного эксперимента) на интервале [0,T].
Определение 3. Системы слабоэквивалентны Sn ≡ Sm (в условиях
одиночного эксперимента) на интервале [0,T] тогда и только тогда, ко-
гда для каждого входа u(t) и (3n + 1)-мерного параметрического состояния
γn = (α,β,χ)n системы Sn найдется (3m + 1)-мерное параметрическое со-
стояние γm = (α,β,χ)m (зависящее от u(t) и γn) системы Sm такое, что
реакция на u(t) системы Sn, находящейся в состоянии γn, совпадает с ре-
акцией на u(t) системы Sm, находящейся в состоянии γm, и наоборот.
В символической записи
{Sn ≡ Sm} ⇔ {∀γn∀u∃γm
Sn(γn;u)
Sm(γm;u)]};
{Sm ≡ Sn} ⇔ {∀γm∀u∃γn
Sm(γm;u)
Sn(γn;u)]}.
Здесь порядок кванторов указывает на зависимость начального состояния од-
ной системы от начального состояния другой системы
Sn(γn;u)
Sm(γm;u) —
реакции систем Sn, Sm на входной сигнал u(t) и параметры γn, γm (различной
размерности) соответственно.
Теорема 1. Пусть наблюдаемая на интервале [0,T] пара вход — выход
(u, x) порождена динамической системой Sn порядка n. Тогда не существует
динамической системы (Sk,k < n) меньшего порядка, слабоэквивалентной
системе Sn.
Доказательство теоремы 1. Действительно, выход x(t) системы Sn
порядка n определяется (3n + 1)-мерным вектором параметров γn, тогда как
реакция системы (Sk, k < n) порядка k для всех входных сигналов u(t) опре-
деляется (3k +1)-мерным вектором параметров γk меньшей размерности. По-
этому любой отклик системы Sk порядка k является проекцией выхода x(t) на
пространство параметров меньшей размерности. Следовательно, система Sk
не может быть вложением в систему Sn.
□
Пусть на интервале [0, T ] в единичном эксперименте с динамической систе-
мой Sn0 порядка n0 получена пара вход — выход (u, x). Предположим, что для
∀k,m таких, что n0 < k < m, можно построить слабоэквивалентные системы
6
Sn ⊂ Sk и Sk ⊂ Sm и выполняется свойство транзитивности Sn ⊂ Sm. Тогда су-
ществует последовательность вложений Sn0 ⊂ Sn0+1 ⊂ · · · ⊂ Sm ⊂ · · ·. Отсюда
следует, что для данной пары вход — выход (u, x) в условиях единичного
эксперимента n0 — наименьший порядок, начиная с которого существуют
слабоэквивалентные системы большего порядка.
Порядок n динамической системы (1) определяется размерностью векто-
ров параметров α и β и не зависит от вектора начальных условий χ. По-
этому необходимо рассмотреть некоторые общие свойства вложенных систем
Sn0 ⊂ Sn0+1 ⊂ ··· ⊂ Sm ⊂ ··· на наборах эквивалентных начальных условий.
Определение 4. Динамические системы Sn и Sm слабоэквивалентны
на интервале [0,T] при нулевых начальных условиях (в единичном экспери-
менте), если каждому нулевому начальному состоянию системы Sn соот-
ветствует эквивалентное нулевое начальное состояние системы Sm.
Теорема 2. Пусть слабоэквивалентные системы Sn ≡ Sm,n = m так-
же слабоэквивалентные при нулевом входном сигнале u(t) ≡ 0 на интерва-
ле [0, T ]
x(t, γn; u = 0) = x(t, γm; u = 0).
Тогда динамические системы Sn и Sm слабоэквивалентны при нулевых на-
чальных условиях
x(t; αn, βn, χn = 0; u) = x(t; αm, βm, χm = 0; u),
а их передаточные функции равны Wn(p) = Wm(p).
Доказательство теоремы 2 следует из свойства разложения реак-
ции линейной динамической системы на сумму свободного и вынужденного
движений.
□
Таким образом, анализ вложений динамической системы сводится к ана-
лизу передаточных функций и их частотных характеристик в условиях еди-
ничного эксперимента.
Следствие 1. Пусть n0 — наименьший порядок, начиная с которого су-
ществуют слабоэквивалентные системы большего порядка при нулевых на-
чальных условиях. Тогда для вложений Sn0 ⊂ Sn0+1 ⊂ · · · ⊂ Sm ⊂ · · · последо-
вательные отношения частотных характеристик слабоэквивалентных ди-
намических систем возрастающего порядка не зависят от частоты
Wn0+1(jω)
Wn0+2(jω)
Wn0+k(jω)
(3)
=
=···=
= ··· = 1.
Wn0(jω)
Wn0+1(jω)
Wn0+k-1(jω)
Доказательство следствия вытекает из теоремы 2 путем очевидных по-
следовательных подстановок частотных характеристик динамических систем
возрастающего порядка. Амплитудно-фазовые частотные характеристики (3)
имеют значения (1, ±2πk, k = 0, 1, . . .) для всех частот, согласованных с ин-
тервалом [0, T ] (см. далее раздел 4).
□
Полученные результаты приводят к следующему принципу оценки поряд-
ка динамической системы: по наблюдениям на интервале [0, T ] пары вход —
выход (u, x) вычисляются последовательность оценок передаточных функций
возрастающего порядка и отношение их частотных характеристик (3); наи-
меньшее значение n0, для которого выполняются условия (3), принимается за
7
оценку порядка динамической системы (1); оценка порядка n0 динамической
системы выполняется за (n0 + 1) шагов.
Рассмотрим условия слабой эквивалентности динамических систем в при-
сутствии измерительного шума η(t) = 0, t ∈ [0, T ]. Этот случай сводится к
предыдущему, если принять
y(t) = x(t),
где x(t) = x(t) + η(t) — оценка выходного сигнала системы (1). Вычисляя ма-
тематическое ожидание оценки x(t), получим
M[x(t)] = x(t),
т.е. необходимо потребовать выполнение условия несмещенности x(t). Если
условие несмещенности оценки x(t) выполняется, то свойства слабой эквива-
лентности динамических систем следует записать относительно математиче-
ского ожидания оценки выходного сигнала M[x(t)]. Кроме того, из свойства
несмещенности оценки выхода x(t) следует несмещенность оценки частотной
характеристики
M[W(jω)] = W(jω)
и выражение (3) принимает вид
M[Wn0+1(jω)]
M[Wn0+2(jω)]
M[Wn0+k(jω)]
=
=···=
= ··· = 1.
M[Wn0(jω)]
M[Wn0+1(jω)]
M[Wn0+k-1(jω)]
Необходимо отметить следующие особенности применения принципа оцен-
ки порядка к данным натурного эксперимента:
1) амплитудно-фазовые частотные характеристики отношений (3) имеют
значения (1, ±2πk), k = 0, 1, . . . для всех n > n0 и на всех частотах;
2) если условия (3) выполняются начиная с некоторого (n0 + 1) для всех
практически важных частот, то это указывает на линейную динамическую
систему;
3) если условия (3) выполняются в ограниченном частотном диапазоне, то
это указывает на исходную нелинейную систему, но которая проявляет
себя как линейная система в этом частотном интервале;
4) частотный диапазон для проверки условий (3) должен быть согласован
с частотным спектром входного сигнала и не пересекаться с частотным
спектром измерительного шума.
4. Параметрическая идентификация динамической системы
Идентификация частотных характеристик пары вход — выход (u, x) для
систем возрастающего порядка по наблюдениям системы (1), (2) на интерва-
ле [0, T ] является нетривиальной задачей. Трудности ее решения обусловлены
8
влиянием на оценки частотных характеристик измерительного шума, неиз-
вестного смещения и неизвестных начальных условий как функций неизвест-
ного порядка динамической системы. Поэтому в настоящей работе предлага-
ется сначала определить все неизвестные параметры (α, β) ∈ Θ, χ, by динами-
ческой системы (1), (2) для различных возрастающих порядков, а затем на
оценках параметров при нулевых начальных условиях χ = 0 вычислить ча-
стотные характеристики. Для решения этой задачи запишем динамическую
систему (1), (2) в форме Фробениуса:
(4)
Ż = A(α)z + B(β)u,
где
⎡
⎤
⎡
⎤
-an-1
1
0
···
0
bn-1
⎡
⎤
x
⎢−an-2
0
1
···
0⎥
⎢bn-2⎥
⎢
⎥
⎢
⎥
⎢
z1
⎥
⎥
⎢
⎥
⎢
⎥
A(α) =⎢⎢
;
B(β) =
;
z=
⎥
⎢
⎥
⎣
⎦;
⎣
⎦
⎣
⎦
-a1
0
1
b1
zn-1
−a0
0
0
b0
(z1, . . . , zn-1)T — вектор ненаблюдаемых вспомогательных переменных.
Наблюдаемая скалярная функция (2) примет вид
(5)
y(t) = Hz + by
+ η(t),
где H = [1, 0, · · · 0] — матрица размера 1 × n.
Математические модели динамической системы, записанные уравнениями
(1), (2) и в форме Фробениуса (4), (5), эквивалентны по параметрам (α, β)
на паре вход — выход (u, x) и не эквивалентны по вектору начальных усло-
вий (x(n-1)0, . . . , x0) = (x0, z10, . . . , z(n-1)0). Неэквивалентность по вектору на-
чальных условий не оказывает влияния на оценку частотных характеристик,
которые вычисляются на оценках параметров (α, β).
Задача 2. Пусть задан порядок n динамической системы (4), (5). Тре-
буется по наблюдениям пары вход — выход (u,y) на интервале [0,T] вы-
числить оценки неизвестных параметров (α, β) ∈ Θ, начальных условий
χ = (x0,z10,...,z(n-1)0) и смещения by.
Для решения этой задачи применим частотно-временной метод иденти-
фикации [9-11], который имеет ряд следующих достоинств: 1) переход в ча-
стотную область выполняется с помощью финитного преобразования Фурье,
которое вычисляется только один раз; 2) общая задача идентификации раз-
деляется на задачу оценки параметров (α, β) ∈ Θ (решается в частотной об-
ласти) и задачу оценки начальных условий (решается во временной области
на оценках параметров); 3) если ограничиться только вычислением частот-
ных характеристик системы (1), то необходимость решения второй задачи
отсутствует.
Определим дискретное множество частот
{
}
2π
(6)
Ω= ωk :ωk =
k,k = 1,... ,K
,
T
9
где K ≤ T fN ; fN = 1/h — частота Найквиста; h — шаг измерений, и вычислим
на Ω финитное преобразования Фурье уравнений (4), (5):
jωkZT(jωk) - z(0) + z(T) = A(α)ZT(jωk) + B(β)UT(jωk);
YT (jωk) = HZT (jωk) + ηT (jωk).
Здесь (UT (jωk), ZT (jωk), YT (jωk), ηT (jωk)) — финитные преобразования Фу-
рье функций (u(t), z(t), y(t), η(t)):
(UT (jωk), ZT (jωk), YT (jωk), ηT (jωk), 0) =
∫T
√
= (u(t), z(t), y(t), η(t), by )e-jωktdt; j =
-1.
0
Выполняя элементарные алгебраические преобразования, получим
(7)
YT (jωk) = H[jωkEn - A(α)]-1[Δz + B(β)UT (jωk)] + ηT (jωk
),
где En — единичная матрица порядка n; Δz = z(0) - z(T ). Отсюда видно, что
YT (jωk) зависит от параметров (α,β) и от разности граничных условий Δz,
которые не наблюдаются и нуждаются в оценке.
Запишем критерий метода наименьших квадратов на дискретном множе-
стве частот (6) в виде
∑
(8)
J (α, β, Δz) =
ε(-jωk)ε(jωk
),
k=1
где ε(jωk) = YT (jωk) - H[jωkEn - A(α)]-1[Δz + B(β)UT (jωk)].
Оценки параметров (α
β) ∈ Θ и разности граничных условий Δz вычис-
ляются минимизацией критерия (8) численными методами нелинейного про-
граммирования:
(9)
( α
β,Δz) = arg min
J (α, β, Δz).
(α
β)∈Θ,Δz
Вычисление интегралов Фурье целесообразно выполнять по формуле Фи-
лона [11, 13], так как в этом случае точность вычислений не зависит от частот-
ного спектра измеренных данных. Оценки (α
β) ∈ Θ вычисляются алгебраи-
ческими методами. Необходимость численного интегрирования уравнений (4)
отсутствует. Поэтому требование устойчивости систем (1) и (4) учитывается
неявно через множество допустимых значений неизвестных параметров Θ.
Оценки вектора начальных условий χ и смещенияby определяются на
оценках параметров (α
β) во временной области методом наименьших квад-
ратов
T
∫
(10)
(χ,by) = arg min
e2(t, α
β;χ,by
)dt,
(χ,by)
0
10
где e(t, α
β;χ,by) = y(t) - x(t, α
β;χ) - by;
x — оценка выходного сигнала
системы (1) или (4), вычисляется на входном сигнале u(t) многократным
интегрированием уравнений n-го порядка системы (4) на оценках парамет-
ров (α
β) и начальных условиях χ.
Результаты, полученные решением задач (9) и (10), дают полное решение
задачи 2 параметрической идентификации системы (1) в частотно-временной
области.
5. Алгоритм идентификации порядка системы (1)
Рассмотрим алгоритм определения порядка системы (1), если измеритель-
ные шумы отсутствуют η(t) ≡ 0.
1. Задают начальное приближение частотной характеристики W0(jω) и по-
лагают n := 0.
2. Увеличивают порядок системы на единицу n := n + 1 и решают задачу 2
параметрической идентификации.
3. На оценках параметров (α
β) ∈ Θ вычисляют частотные характеристики
системы (1)
bn-1(jωk)n-1 +bn-2(jωk)n-2 + . . . +b1(jωk) +b0
Wn(jωk) =
(jωk)n + ân-1(jωk)n-1 + ân-2(jωk)n-2 + . . . + â1(jωk) + â0
4. Вычисляют отношение частотных характеристик (3) Wn+1(jω)/Wn(jω).
5. Строят диаграммы Боде отношений (3) на множестве частот Ω и запоми-
нают Wn(jω), найденную на шаге 3.
6. Переходят к шагу 2 и повторяют все вычисления.
7. За оценку порядка динамической системы n0 принимается наименьшее n,
начиная с которого диаграммы Боде отношений (3) на всех частотах Ω
принимают значения (0, ±2πk, k = 0, 1, . . .). На этом процесс решения за-
дачи структурно-параметрической идентификации заканчивается.
Алгоритм оценивания порядка системы (1) в присутствии измерительных
шумов η(t) = 0, t ∈ [0, T ] состоит из аналогичной последовательности шагов.
Однако отношение частотных характеристик на шаге 4 вычисляется на оцен-
ках частотных характеристик возрастающего порядка
Wn+1(jω)/Wn(jω).
Очевидно, что в этом случае условие (3) будет выполняться только в среднем
и шаг 7 формулируется в следующем виде
8. За оценку порядка динамической системы n0 принимается наименьшее n,
начиная с которого диаграммы Боде отношений (3) на всех частотах Ω
принимают средние по частоте значения (0, ±2πk, k = 0, 1, . . .).
Следует отметить высокую вычислительную эффективность метода
частотно-временной идентификации по сравнению с методами идентифика-
ции динамических систем только во временной области.
11
6. Пример
Рассмотрим пример решения задачи структурно-параметрической иденти-
фикации двух динамических систем.
Первая динамическая система описывается системой дифференциальных
уравнений второго порядка
x = a1x + z1 + b1u;
(11)
Ż1 = a0x + b0u.
Вторая динамическая система описывается системой дифференциальных
уравнений третьего порядка
x = ã2x + z1 +b2u;
(12)
Ż1 = ã1x + z2 +b1u;
Ż2 = ã0x +b0u.
Рассмотрим динамические системы (11), (12) такие, что (a0 = ã1, a1 = ã2,
b0 =b1, b1 =b2). Входной сигнал u(t) в системах (11), (12) является одним
и тем же. В этих условиях систему (12) можно рассматривать как систе-
му (11), в которой переменная z1(t) возбуждается дополнительным ненаблю-
даемым сигналом z2(t), зависящим от наблюдаемой пары (u, x). Множество
допустимых значений параметров определяется условиями устойчивости си-
стем (11), (12) Θ = {(a0, a1, ã0, ã1, ã2) < 0}.
Отклик систем (11), (12) наблюдается одним и тем же измерителем
y(t) = x(t) + by + η(t),
где η(t) ∈ [-1, 1] — случайная последовательность с нулевым средним, рас-
пределенная по равномерному закону; by = 1 — смещение измерителя. Здесь
уровень измерительных шумов и величина смещения приняты нереально
большими.
Можно ли в экспериментах над динамическими системами (11) и (12),
выполненными в одинаковых условиях, различить структуры этих систем?
Данные одиночного “эксперимента” получены численным решением систе-
мы (11) с параметрами (a0 = -4, a1 = -1, b0 = 10, b1 = 0) и системы (12) с па-
раметрами (ã0 = -4, ã1 = -1, ã2 = -1,b2 = 0,b1 = 10,b0 = -1). Начальные
значения для первых двух переменных систем (11) и (12) приняты равны-
ми x(0) = 1, z1(0) = -1, z2(0) = 0. Эксперимент выполняется на интервале
времени t ∈ [0, T ], T = 30 и на одном и том же входном сигнале переменной
частоты
2-ω0
2π
u(t) = 1 + 2 sin((ω0 + ωt)t),
ω=
;
ω0 =
T
T
Уравнения (11) и (12) интегрировались с шагом h = 0,001. Псевдослучайная
последовательность η(t) получена генератором случайных чисел RANDOM
пакета MATLAB.
12
3,0
20
2,5
10
2,0
0
1,5
10
0
10
20
30
1,0
20
0,5
10
0
0
0,5
10
1,0
20
0
10
20
30
0
10
20
30
t
t
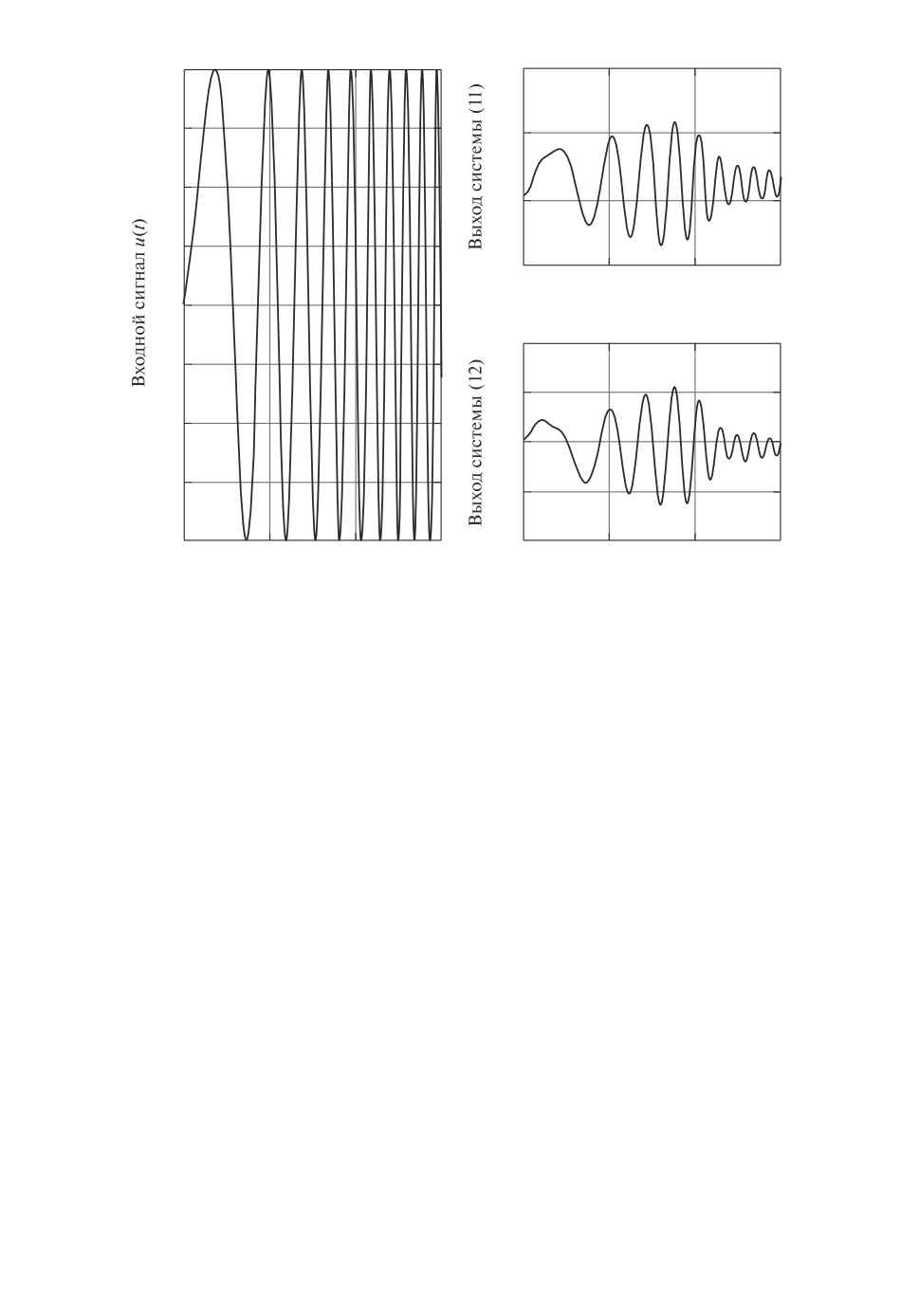
Рис. 1. Входной и выходные сигналы систем (11) и (12).
На рис. 1 показаны входной сигнал и выходные сигналы систем (11)
и (12) (для удобства восприятия графики приведены без измерительного шу-
ма η(t) ≡ 0). Видно, что выходы систем (11) и (12) почти не отличаются друг
от друга.
Задача параметрической идентификации решалась частотно-временным
методом на множестве частот Ω = {ωk : ωk = kω0, k = 1, . . . , 50}. В задаче
идентификации порядка начальное приближение частотной характеристи-
ки было принято W0(jω) = 1. В процессе решения задачи структурно-па-
раметрической идентификации порядок динамических систем возрастал
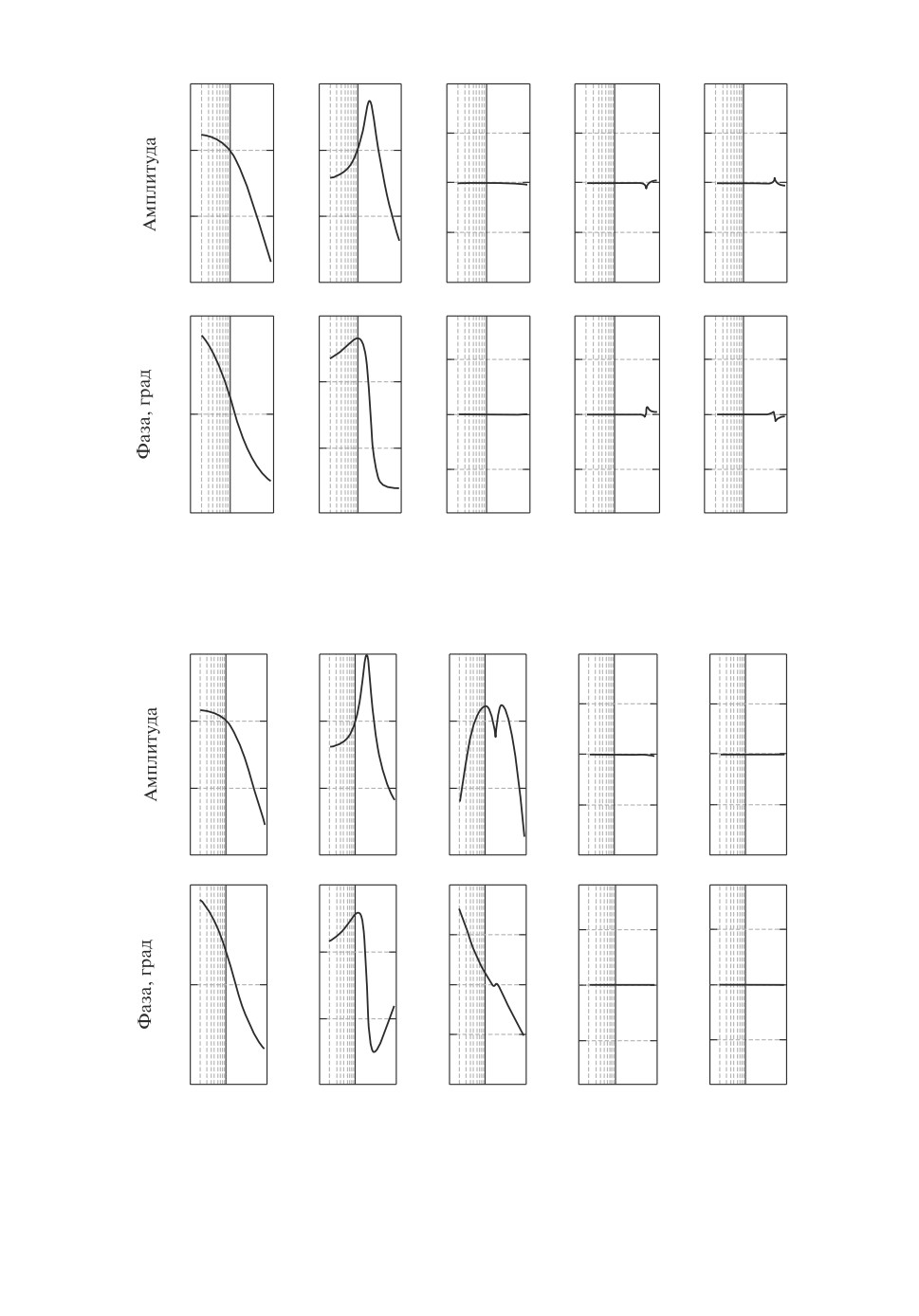
от n = 1 до n = 5. Полученные результаты показаны на рис. 2 и 3. Вид-
но, что для системы (11) слабоэквивалентные системы появляются начи-
ная с n = 2, а для системы (12) — начиная с порядка n = 3, т.е. поряд-
ки систем (11) и (12) вычислены правильно. Получены следующие оцен-
ки параметров систем (11) и (12), оценки начальных условий и оцен-
ка смещения: для системы
(11)
â1 = -1;
â0 = -3,99;
b1 = 10;
b0 = 0,01;
x(0) = 0,996; z1(0) = -1,036;by = 0,993; для системы (12) â2 = -1; â1 = -4;
â0 = -1;b2 = -0,005;b1 = 9,987;b0 = -1,017;
x(0) = 1,039;
z1(0) = -0,941;
z2(0) = 0,123;by = 1,011. Очевидна близость этих оценок и априорных зна-
чений. Для сравнения приведем значения оценок параметров системы (11),
тогда как “экспериментальные” данные были получены интегрированием
системы (12): â1 = -0,643; â0 = -3,714;b1 = 1,141;b0 = 8,833; x(0) = 0,959;
13
n = 1
n = 2
n = 3
n = 4
n = 5
20
10
20
20
20
10
10
10
10
0
0
0
0
0
10
10
10
10
10
20
20
20
20
100
100
100
100
100
0
400
50
50
50
350
50
0
0
0
300
50
50
50
100
250
0
100
100
100
100
10
Частота, 1/с
Рис.
2. Диаграммы Боде отношений Wn+1/Wn для системы (11).
n = 1
n = 2
n = 3
n = 4
n = 5
20
10
2
20
20
10
10
10
0
0
0
0
0
10
2
10
10
10
20
4
20
20
100
100
100
100
100
0
50
100
50
50
50
0
50
0
0
0
50
50
50
50
100
100
100
0
100
100
100
100
10
Частота, 1/с
Рис.
3. Диаграммы Боде отношений Wn+1/Wn для системы (12).
14
z1(0) = 3,076;by = -2,451. Эти результаты получены на некоторой реализа-
ции измерительного шума и являются типичными и для других реализаций.
Численное решение примера получено в пакете компьютерной математи-
ки MATLAB с применением программ: LSIM для решения систем (11) и (12);
FMINCON для решения задач (9) и (10); BODE для вычисления частотных
характеристик. Финитные интегралы Фурье вычислялись по формуле Фило-
на программой, приведенной в [11].
Таким образом, предложенный метод корректно решает задачу струк-
турно-параметрической идентификации (в условиях смещения нуля измери-
теля и большой интенсивности измерительного шума).
7. Заключение
Предложен новый метод структурно-параметрической идентификации ди-
намической системы, заданной линейными дифференциальными уравнения-
ми с постоянными коэффициентами. Под структурно-параметрической иден-
тификацией понимаются: оценка порядка дифференциальных уравнений;
всех коэффициентов, удовлетворяющих некоторым ограничениям (например,
по условиям устойчивости); неизвестных начальных условий и смещения из-
мерителя. Метод основан на свойстве слабой эквивалентности двух и более
систем. Решение задачи структурной идентификации ищется на множестве
слабоэквивалентных систем. Для рассматриваемого класса динамических си-
стем определение порядка линейных дифференциальных уравнений сводит-
ся к анализу отношений частотных характеристик последовательно услож-
няемых структур. За оценку порядка динамической системы принимается
наименьший порядок динамической системы, начиная с которого усложне-
ние структуры динамической системы приводит только к последовательности
новых слабоэквивалентных систем. Оценка порядка динамической системы
определяется за конечное число шагов. Учет влияния измерительного шума
на решение задачи структурной идентификации приводит к замене частот-
ных характеристик динамических систем на математическое ожидание этих
частотных характеристик. Однако в условиях одиночного эксперимента (или
с малым числом реализаций) это не приводит к изменению алгоритма струк-
турной идентификации.
Решению задачи структурной идентификации предшествует необходи-
мость решения задачи параметрической идентификации, которое ищется
частотно-временным методом. В процессе решения задачи параметрической
идентификации вычисляются оценки параметров динамической системы в
частотной области, а затем во временной области определяются оценки на-
чальных условий и смещение измерителя. На оценках параметров вычисля-
ются частотные характеристики динамической системы. В результате реше-
ния задачи структурно-параметрической идентификации получают оценки
порядка динамической системы, оценки параметров и оценку смещения из-
мерителя.
На иллюстративном примере (рис. 2 и 3) показано, что предложенный но-
вый метод структурно-параметрической идентификации имеет высокую чув-
ствительность и позволяет разделить две динамические системы различной
15
структуры в условиях одиночного эксперимента и больших измерительных
ошибок, переходные процессы которых визуально близки.
Разработанный метод полностью решает задачу структурно-параметриче-
ской идентификации стационарной линейной системы по наблюдениям пары
вход — выход на ограниченном временном интервале в условиях измеритель-
ных ошибок.
СПИСОК ЛИТЕРАТУРЫ
1.
Труды XII Всероссийского совещания по проблемам управления. М.: ИПУ, 2014.
2.
Эйкхофф П. Основы идентификации систем управления. М.: Мир, 1975.
3.
Типовые линейные модели объектов управления / Под ред. Н.С. Райбмана.
М.: Энергоатомиздат, 1983. 264 с.
4.
Гинсберг К.С. Новый подход к проблеме структурной идентификации. II // АиТ.
2002. № 6. С. 85-98.
Ginsberg K.S. A New Approach to the Problem of Structural Identification. II //
Autom. Remote Control. 2002. V. 63. No. 6. C. 946-959.
5.
Гинсберг К.С. К основам методологии структурной идентификации для цели
проектирования технических систем // Тр. XIII Всерос. сов. по проблемам
управления. М.: ИПУ, 2019.
6.
Карабутов Н.Н. Структурная идентификация систем: анализ информационных
структур. М.: Книжный дом “ЛИБРОКОМ”, 2009. 176с.
7.
Novara C., Vincent T., Hsu K., Milanese M., Poolla K. Parametric identification of
structured nonlinear systems // Automatica. 2011. № 47. C. 711-721.
8.
Корсун O.H. Алгоритм идентификации динамических систем с функционалом
в частотной области // АиТ. 2003. № 5. С. 111-121.
Korsun O.N. An Identification Algorithm for Dynamic Systems with a Functional
in the Frequency Domain // Autom. Remote Control. 2003. Т. 64. № 5. С. 772-781.
9.
Овчаренко В.Н. Идентификация аэродинамических характеристик воздушных
судов по полетным данным. М.: Изд-во МАИ, 2017.
10.
Danilevich E.V., Evstratov A.R., Kukharenko N.I., Ovcharenko V.N., Poplavs-
kii B.K. Identification of Constant Parameters of Dynamic Systems by a Time-
Frequency Method // J. Comput. Syst. Sci. Int. 2018. V. 57. No. 4. P. 3-13.
11.
Овчаренко В.Н. Аэродинамические характеристики летательных аппаратов:
идентификация по полетным данным. М.: ЛЕНАНД, 2019. 236 с.
12.
Заде Л., Дезоер Ч. Теория линейных систем. М.: Наука, ГРФ.-М; Л., 1970.
13.
Бахвалов Н.С. Численные методы. М.: Наука, 1973.
Статья представлена к публикации членом редколлегии Н.Н. Бахтадзе.
Поступила в редакцию 20.03.2019
После доработки 25.06.2019
Принята к публикации 18.07.2019
16