Автоматика и телемеханика, № 1, 2020
© 2020 г. Е.Н. РОЗЕНВАССЕР, д-р техн. наук (fishka33@mail.ru)
(Государственный морской технический университет, Санкт-Петербург),
Б.П. ЛЯМПЕ , д-р инженерии,
В. ДРЕВЕЛОВ, д-р инженерии (wolfgang.drewelow@uni-rostok.de),
Т. ЯЙНШ, д-р инженерии (torsten.jeinsch@uni-rostok.de)
(Университет Росток, ФРГ)
СТАНДАРТИЗИРУЕМОСТЬ И H2-ОПТИМИЗАЦИЯ
ОДНОКОНТУРНОЙ МНОГОМЕРНОЙ ИМПУЛЬСНОЙ СИСТЕМЫ
С МНОЖЕСТВЕННЫМИ ЗАПАЗДЫВАНИЯМИ
Изучается одноконтурная многомерная система с тремя звеньями чис-
того запаздывания. Приводятся достаточные условия стандартизируемо-
сти системы S0, при выполнении которых задача H2-оптимизации си-
стемы S0 сводится к более простой задаче H2-оптимизации некоторой
эквивалентной импульсной системы с одним звеном чистого запаздыва-
ния. Строится множество фиксированных полюсов H2-оптимальной си-
стемы S0.
Ключевые слова: одноконтурная многомерная импульсная система с
запаздыванием, стандартизируемость, H2-оптимизация, фиксированные
полюса.
DOI: 10.31857/S000523102001002X
1. Введение
Проблема учета запаздывания играет важную роль при решении задач
анализа и синтеза импульcных систем. Различным аспектам этой пробле-
мы посвящена значительная литература. Разнообразные подходы к решению
указанной проблемы содержатся в публикациях [1-20] и цитированных там
источниках. Анализ существующей литературы показывает, что теоретиче-
ские и вычислительные трудности, связанные с исследованием импусльных
систем с запаздыванием, существенно возрастают с увеличением количества
элементов чистого запаздывания в структуре изучаемой системы. В связи с
этим несомненный теоретический и практический интерес представляет за-
дача построения для заданной импульсной системы с множественными за-
паздываниями эквивалентной системы с меньшим числом элементов чистого
запаздывания.
В [20] на основе концепции параметрической передаточной матрицы
(ППМ) сформирован класс многомерных импульсных систем с множествен-
ными запаздываниями, которые названы стандартизируемыми. При этом по-
казано, что задача H2-оптимизации стандартизируемой системы сводится к
решению аналогичной задачи для эквивалентной стандартной импульсной
системы Sτ , содержащей только один элемент чистого запаздывания. По-
этому решение задачи H2-оптимизации для стандартизируемой импульсной
17
системы может быть получено с помощью алгоритма, описанного в [19]. В на-
стоящей статье, которая является непосредственным продолжением [20], об-
щие результаты [20] применяются к практически важному типу импульсных
систем: многомерной одноконтурной импульсной системе S0 с несколькими
запаздываниями. Для конкретности рассматривается ситуация, когда число
элементов чистого запаздывания в контуре управления равно трем, а чис-
ло составляющих наблюдаемого вектора выхода, имеющих различные вре-
менные сдвиги, равно двум. Однако предлагаемый подход без существенных
изменений распространяется на общий случай. В статье приведены доста-
точные условия стандартизируемости системы S0, обычно выполняющиеся в
приложениях, и построена соответствующая стандартная система Sτ . Кроме
того, определена совокупность стационарных элементов, которые порождают
полюса замкнутой H2-оптимальной системы, не зависящие от вида исполь-
зуемого преобразователя «цифра-аналог».
2. Обобщенная стандартная импульсная система
с множественными запаздываниями
Приведем используемые в последующем изложении общие свойства обоб-
щенной стандартной импульсной системы с запаздыванием Sg, установлен-
ные в [20]. В определении обобщенной стандартной импульсной системы пред-
полагается, что управляемый стационарный объект описывается уравнения-
ми состояния:
dv(t)
= Av(t) + B1x(t - τ1) + Bu(t - τ2),
(2.1)
dt
y(t) = Cv(t),
где v(t) - вектор состояния объекта, y(t) - вектор управляемого выхода, x(t) -
вектор входа, u(t) - вектор управления и A, B, B1, C - постоянные матрицы
соответствующих размеров. Предполагается, что пара A, B полностью управ-
ляема и пара A, C полностью наблюдаема. Кроме того, в (2.1) τ1 и τ2 - неот-
рицательные постоянные.
Предполагается, что объект (2.1) управляется импульсным регулятором
(ИР), который имеет период квантования T и описывается системой уравне-
ний (2.2)-(2.4)
(2.2)
ξk
= y(kT), k = 0,±,1,... ,
α0ψk + α1ψk-1 + ... + αρψk-ρ =
(2.3)
= β0ξk + β1ξk-1 + ... + βρξk-ρ, detα0 = 0,
(2.4)
u(t) = h(t - kT )ψk
,
kT < t < (k + 1)T,
где αi, βi - постоянные матрицы соответствующих размеров и h(t) - матрица,
элементы которой имеют ограниченную вариацию на интервале 0 ≤ t ≤ T ,
а условие det α0 = 0 является условием каузальности дискретного регулятора.
18
Используя оператор обратного сдвига ζ [3], уравнение алгоритма управле-
ния (2.3) можно записать в полиномиальной форме
(2.5)
α(ζ)ψk = β(ζ)ξk,
где α(ζ) и β(ζ) - полиномиальные матрицы вида
α(ζ) = α0 + α1ζ + . . . + αρζρ,
(2.6)
β(ζ) = β0 + β1ζ + . . . + βρζρ.
Далее рациональную матрицу
(2.7)
=α-1
(ζ)β(ζ)
будем называть передаточной матрицей алгоритма управления.
Кроме того, в определении системы Sg предполагается, что для любой
пары различных собственных чисел матрицы A p1 и p2 выполняется условие
непатологичности периода квантования [3]
(2.8)
ep1T = ep2T .
В качестве наблюдаемого выхода системы Sg рассматривается вектор
[
]
(2.9)
z′(t) =
z′1(t) ... z′γ(t)
,
где штрих - оператор транспонирования и zi(t) - наблюдаемые парциальные
векторы, заданные соотношениями
(2.10)
zi(t) = Civ(t - τ3i) + Diu(t - τ2 - τ3i
),
где τ3i, i = 1, . . . , γ, - вещественные постоянные, которые могут иметь значе-
ния произвольного знака.
В совокупности соотношения (2.1)-(2.10) определяют систему дифферен-
циально разностных уравнений, которую, при выполнении всех указанных
выше условий, назвали в [20] обобщенной стандартной системой с множе-
ственными запаздываниями Sg. Частный случай системы Sg, соответствую-
щий значению γ = 1, рассмотрен в [19] и назван там стандартной импульсной
системой Sτ .
По отношению к парциальному выходу zi(t) система Sg сводится к стан-
дартной системе Sτi, которой в соответствии с [19] может быть сопоставлена
параметрическая передаточная матрица (ППМ) Wi(s, t), определяемая фор-
мулой
(2.11)
Wi(p,t) = φLτiμ(T,p,t)RN (p)Mτ (p) + Kτi(p), i = 1, . . . , γ.
19
Здесь
∑
1
2π
φLτiμ(T,p,t) =
Lτi(p + kjω)μ(p + kjω)ekjωt, ω =
,
T
T
k=-∞
∫T
μ(p) = h(t)e-ptdt,
0
(2.12)
[
]
RN(p) =Wd(p) I -DNμ(T,p,-τ2)Wd(p)
-1,
∑
DNμ(T,p,-τ2) =1
N (p + kjω)μ(p + kjω)e-(p+kjω)τ2 ,
T
k=-∞
Wd(p) = Wd(ζ)
ζ=e-pT .
В (2.11) и (2.12) использованы обозначения
(2.13)
Kτi(p) = Ki(p)e-pτKi , Lτi(p) = Li(p)e-pτLi ,
где Ki(p), Li(p) - рациональные матрицы вида:
(2.14)
Ki(p) = Ci(pI - A)-1 B1, Li(p) = Ci(pI - A)-1 B + Di.
Помимо этого, в (2.11) и далее
(2.15)
Mτ (p) = M(p)e-pτM , Nτ (p) = N(p)e-pτN ,
где
(2.16)
M (p) = C(pI - A)-1B1, N(p) = C(pI - A)-1
B.
Фигурирующие в (2.13), (2.15) постоянные τKi, τLi, τM , τN определяются
формулами:
τKi = τM + τ3i, τLi = τN + τ3i,
(2.17)
τM = τ1, τN = τ2.
Из (2.9) следует, что при входе x(t) и наблюдаемом выходе z(t) ППМ си-
стемы Sg имеет вид
⎡
⎤
W1(p,t)
⎦,
(2.18)
Wzx(p,t) =⎣ ...
Wγ(p,t)
что с учетом (2.11) приводит к соотношению
(2.19)
Wzx(p,t) = φLτμ(T,p,t)RN (p)Mτ (p) +Kτ(p),
20
где
[
]
[
]
K′
L′
(2.20)
(p) =
K′τ1(p) ... K′τγ(p)
,
(p) =
L′τ1(p) ... L′τγ(p)
τ
τ
и
∑
1
(2.21)
φLτμ(T,p,t) =
Lτ (p + kjω)μ(p + kjω)ekjωt.
T
k=-∞
Далее правую часть формулы (2.19) будем называть стандартной формой
ППМ для импульсной системы с множественными запаздываниями.
3. Стандартизируемость одноконтурной импульсной системы
с множественными запаздываниями
Определение 1. Далее импульсную систему S0 произвольной струк-
туры со входом x(t) и выходом z(t), состоящую из линейных стационар-
ных элементов и импульсного регулятора вида (2.2)-(2.4), будем называть
структурно стандартизируемой, если у нее существует ППМ W0¯zx(p,t) от
входа x(t) к выходу z(t), имеющая стандартную форму (2.19).
Определение 2. Структурно стандартизируемую систему S0 с ППМ
W0¯zx(p,t) будем называть стандартизируемой, если существует обобщен-
W¯
ная стандартная систем
Sg, ППМ которой
zx(p,t) совпадает с ППМ
W0¯zx(p,t).
Далее обобщенную стандартную систем
Sg будем называть порождаю-
щей для стандартизируемой системы S0. Ниже систем
Sg и S0 считаются
эквивалентными. При этом на систему S0 переносятся все качественные осо-
бенности систем
Sg, установленные в [20].
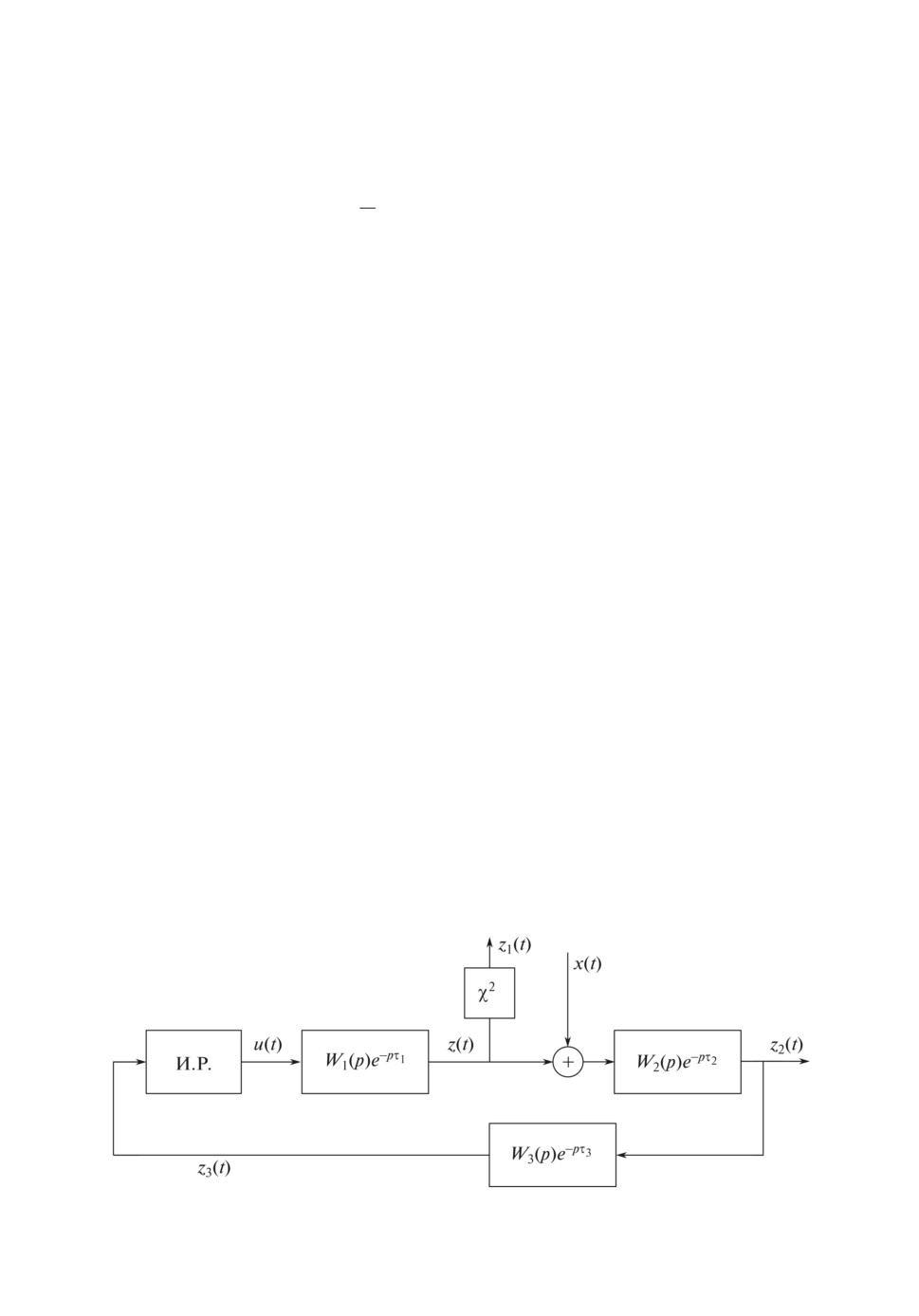
В данном разделе изучается вопрос стандартизируемости многомерной од-
ноконтурной системы S0 с тремя запаздываниями, структура которой изоб-
ражена на рис. 1.
На рис. 1 И.Р. - импульсный регулятор (2.2)-(2.4), Wi(p), i = 1, 2, 3, - ра-
циональные матрицы, свойства которых будут оговорены далее, χ2 - положи-
тельная постоянная, τi, i = 1, 2, 3, - неотрицательные постоянные. В качестве
Рис. 1.
21
вектора наблюдаемого выхода будем рассматривать вектор
[
]
[
]
χ2z(t)
z1(t)
(3.1)
z(t) =
=
z2(t)
z2(t)
Теорема 1. Для стандартизируемости системы S0 при выборе наблю-
даемого выхода в виде (3.1) достаточно выполнения следующих условий:
1) рациональные матрицы
=W3(p)W2(p)W1(p), M(p) = W3(p)W2(p),
[
]
(3.2)
0
=
W2(p)
- строго правильные;
2) рациональная матрица
[
]
χ2W1(p)
(3.3)
=
W2(p)W1(p)
- по меньшей мере правильная;
3) выполнено условие
(3.4)
MdegN(p) = MdegW1(p) + MdegW2(p) + MdegW3
(p),
где M deg - обозначение степени Мак-Миллана [20, 21];
4) для всех различных полюсов матрицы N(p) выполнены условия вида
(2.8).
Доказательства теоремы 1 и последующих теорем 2 и 3 приведены в При-
ложении.
Замечание 1. Условие (3.4) означает отсутствие внутренних сокраще-
ний в произведении W3(p)W2(p)W1(p). В скалярном случае условие (3.4) рав-
носильно несократимости этого произведения.
Замечание 2. Условия теоремы 1 не зависят от величин запаздыва-
ний τi, i = 1, 2, 3.
Если для системы S0 не выполняется хотя бы одно из условий 1-3 теоре-
мы 1, то она не является стандартизируемой.
4. H2-оптимизация и фиксирующие полюса стандартизируемой системы S0
Теорема 2. Пусть для системы S0 выполнены условия теоремы 1. То-
гда передаточная матрица W0d(ζ) H2-оптимального алгоритма управления
совпадает с передаточной матрицей H2-оптимального алгоритма управле-
ния для одноконтурной систем
S0, изображенной на рис. 2, где выполнено
условие
(4.1)
τ =τ1 +τ2 +τ3
22
Рис. 2.
и вектор наблюдаемого выхода z(t) выбран в виде
[
]
[
]
χ2z(t)
z1(t)
(4.2)
z(t) =
=
z2(t)
z2(t)
При выполнении условий теоремы 2 задача H2-оптимизации систем
S0
сводится к решению аналогичной задачи для соответствующей порождающей
расширенной стандартной систем
Sτ, что может быть выполнено на основе
результатов [19].
В соответствии с указанным в [20] на системы S0
S0 распространяются
все качественные особенности H2-оптимальной порождающей системы
Sτ.
В частности, системы S0
S0 имеют совпадающие множества фиксирующих
полюсов.
Теорема 3. Пусть для системы S0 выполнены условия теоремы 1. Обо-
значим через M0 объединение множеств полюсов матриц W1(p) и W3(p).
Также обозначим через M1 множество различных полюсов из множе-
ства M0. Пусть p1,... ,pλ — элементы множества M1. Тогда при Repi < 0
число ζi = e-piT является полюсом H2-оптимальной системы S0, а при
Repi > 0 аналогичным свойством обладает число ζi = epiT .
В соответствии с терминологией [21] M1 - это множество фиксирующих
полюсов системы S0, а множество чисел ζi - это множество фиксирован-
ных полюсов H2-оптимальной системы. Из теоремы 3 следует практически
важный вывод о том, что при проектировании системы S0 на основе мето-
дов H2-оптимизации необходимо накладывать определенные ограничения на
свойства полюсов матриц W1(p) и W3(p). Если среди этих полюсов имеют-
ся полюса, лежащие вблизи мнимой оси, то степень устойчивости процессов
в H2-оптимальной системе может оказаться неудовлетворительной. Если же
среди полюсов матриц W1(p) и W3(p) имеются полюса, лежащие на мни-
мой оси, то проектирование на основе методов H2-оптимизации оказывается
невозможным, поскольку H2-оптимальная система оказывается на границе
области устойчивости.
23
5. Заключение
В статье описан подход к решению задач стандартизируемости и H2-оп-
тимизации многомерных одноконтурных импульсных систем с несколькими
запаздываниями, основанный на переходе к эквивалентной системе с одним
запаздыванием. Рассмотрен способ построения множества фиксированных
полюсов для H2-оптимальной системы.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Доказательство проводится в несколь-
ко этапов.
Покажем, прежде всего, что при выполнении условий теоремы 1 для си-
стемы S0 существует ППМ W0(p, t), которая имеет стандартную формулу.
Это означает, что система S0 структурно стандартизируема. Для этого в со-
ответствии с общим подходом [16-21] предполагаем, что на вход системы S0
поступает матричный экспоненциальный сигнал
(Π.1)
x(t) = ept
I,
и находим режим функционирования системы S0, в котором
(Π.2)
zi(p,t) = eptWi
(p, t), i = 1, 2, 3,
где матрицы
(Π.3)
Wi(p,t) = Wi
(p, t + T ), i = 1, 2, 3,
— это ППМ от входа x(t) к выходам zi(t), i = 1, 2, 3. В условиях тео-
ремы 1 элементы матрицы W3(p, t) непрерывны относительно t. Поэто-
му, используя стробоскопическое свойство аналого-цифрового преобразова-
теля (АЦП) (2.2), можно перейти к рассмотрению разомкнутой системы на
рис. 3.
Рис. 3.
Используя (Π.1)-(Π.3), из рис. 3 можно получить после сокращения на ept
W3(p,t) = φNτ μ(T,p,t)Wd(p)W3(p,0) + W3(p)W2(p)e-p(τ2+τ3),
(Π.4)
где
∑
1
(Π.5)
φNτ μ(T,p,t) =
N (p + kjω)μ(p + kjω)e-(p+kjω)τ ekjωt.
T
k=-∞
24
Кроме того,
(Π.6)
Nτ (p) = N(p)e-pτ ,
где, как и ранее,
(Π.7)
τ =τ1 +τ2 +τ3.
Поскольку матрица (Π.5) при всех p, не являющихся ее полюсами, непре-
рывна относительно t, то в левой и правой частях (Π.4) можно положить
t = 0. В результате приходим к равенству
(Π.8)
W3(p,0) = φNτ μ(T,p,0)Wd(p)W3(p,0) + W3(p)W2(p)e-p(τ2+τ3).
Если учесть, что
φNτ μ(T,p,0) =
∑
(Π.9)
1
=
N (p + kjω)M(p + kjω)e-(p+kjω)τ =DNμ (T, p, -τ),
T
k=-∞
то от (Π.8) приходим к равенству
[
]-1
(Π.10)
W3(p,0) = I -DNμ(T,p,-τ)Wd(p) W3(p)W2(p)e-p(τ3+τ2).
Возвращаясь к рис. 3, с учетом (Π.10) получаем
W1(p,t) = χ2φW1τ μ(T,p,t)RN (p)W3(p)W2(p)e-p(τ3+τ2),
W2(p,t) = φW2τ W1τ μ(T,p,t)RN (p)W3(p)W2(p)e-p(τ2+τ3) + W2(p)e-pτ2 ,
(Π.11)
[
]-1
RN(p) =Wd(p) I -DNμ(T,β,-τ)Wd(p)
Используя (Π.11) и (2.18), после несложных преобразований можно уста-
новить, что ППМ системы S0 от входа x(t) к выходу (3.1) имеет стандартную
форму (2.19) с матрицамиK(p),L(p), M(p), N(p), которые определены фор-
мулами (3.2), (3.3), а постоянные τN , τM , τLi, τKi равны
τN = τ1 + τ2 + τ3 = τ, τM = τ2 + τ3,
(Π.12)
τL1 = τ1, τL2 = τ1 + τ2,
τK1 = 0, τK2 = τ2.
Из доказанного следует, что система S0 структурно стандартизируема.
Для доказательства стандартизируемости системы S0 покажем, что при
выполнении условий теоремы 1 выполнены общие необходимые и достаточ-
ные условия стандартизируемости, приведенные в теореме 1 из [20]. Усло-
вия а) и б) этой теоремы выполняются очевидным образом. Выполнение усло-
вий (2.17) сразу следует из (Π.12).
25
Условие 1 выполнено по определению. Остается доказать, что условие в)
теоремы 1 из [20] также выполняется, т.е. что из условия (3.4) вытекает ра-
венство
[
]
K(p)
L(p)
Δ
(Π.13)
MdegN(p) = Mdeg
=MdegW0
(p).
M (p) N(p)
Для этого отметим, что с учетом (3.2) и (3.3) имеем
⎡
⎤
[
]
0
χ2W1(p)
K(p)
L(p)
⎢
⎥
⎢
⎥
(Π.14) W0(p) =
=
2(p)
W2(p)W1(p)
⎣ W
⎦.
M (p) N(p)
W3(p)W2(p) W3(p)W2(p)W1(p)
Ведем обозначения:
(Π.15)
=ψi, i = 1,2,3, ψ1 + ψ2 + ψ3=
ψ.
Из свойств степени Мак-Миллана, (Π.14) и (3.4) сразу следует, что
MdegW0(p) ≥ MdegN(p) =
(Π.16)
= MdegW1(p) + MdegW2(p) + MdegW3(p) = ψ.
С другой стороны, матрицу W0(p) можно представить в виде произведения
(Π.17)
W0(p) =W3(p)W2(p)W1
(p),
где
⎡
⎤
⎡
⎤
I
0
0
0
χ2I
⎥
⎥
W3(p) =⎣ 0 I
0
⎦,
W2(p) =⎣ W2(p) W2(p)
⎦,
(Π.18)
0
0
W3(p)
W2(p) W2(p)
[
]
I
0
W1(p) =
0
W1(p)
Покажем, что справедливы равенства
(Π.19)
MdegWi(p) = ψi
,
i = 1,2,3.
Для этого отметим, что из (Π.18) имеем
(Π.20)
MdegWi(p) ≥ ψi
,
i = 1,2,3.
С другой стороны, из (Π.15) вытекает существование представлений MFD
(Matrix fraction description) [22]
(Π.21)
Wi(p) = a-1i(p)bi(p), i = 1, 2, 3,
26
где
(Π.22)
deg det ai(p) = ψi
,
i = 1,2,3.
С помощью (Π.21) и (Π.18) при i = 3 находим MFD
(Π.23)
W3(p) = a-13(p)b3(p),
где
⎡
⎤
⎡
⎤
I
0
0
I
0
0
⎢
⎥
⎥
(Π.24)
a3(p) =
⎣ 0 I
0
⎦,
b3(p) =⎣ 0 I
0
⎦.
0
0
a3(p)
0
0
b3(p)
Поскольку
(Π.25)
deg det a3(p) = deg det a3(p) = ψ3,
то из свойств непонижаемых MFD [22] следует, что
(Π.26)
MdegW3(p) ≤ ψ3.
Сопоставляя (Π.26) и (Π.20), приходим к равенству (Π.19) при i = 3. Для
случая i = 1 доказательство (Π.20) проводится аналогично.
Остается рас-
смотреть случай i = 2. Очевидно, что имеем
⎡
⎤
I
0
0
⎥
(Π.27)
W2(p) =⎣ 0 I I
⎦ W
4
(p),
0
0
I
где
⎡
⎤
0
χ2I
⎥
(Π.28)
W4(p) =⎣
0
0
⎦.
W2(p) W2(p)
Из (Π.27) следует, что
(Π.29)
MdegW2(p) = MdegW4
(p),
так как первый сомножитель в (Π.27) - постоянная несингулярная матрица.
Используя MFD (Π.21) при i = 2, можно получить MFD
(Π.30)
(p),
W2(p) = a-12b2
где
(Π.31)
deg det a2(p) = ψ2.
27
Из (Π.31), (Π.30) следует, что
(Π.32)
MdegW2(p) ≤ ψ2.
Сопоставляя (Π.32) и (Π.20), получаем, что
(Π.33)
MdegW2(p) = ψ2,
что завершает доказательство формул (Π.19). Из (Π.19) и (Π.17) вытекает,
что
(Π.34)
MdegW0(p) ≤ ψ1 + ψ2 + ψ3
= ψ.
С другой стороны, из (Π.14), (Π.15) находим, что
(Π.35)
MdegW0(p) ≥ MdegN(p) = ψ1 + ψ2 + ψ3
= ψ.
Сопоставление (Π.34) и (Π.35) приводит к равенству
(Π.36)
MdegW0
(p) = M degN(p) = ψ,
что завершает доказательство теоремы 1.
Доказательство теоремы 2. С помощью выкладок, аналогичных
использованным при доказательстве теоремы 1, устанавливается, что ППМ
систем
S0 от входа x(t) к выходам zi(t) имеют вид:
Wz1x(p,t) = χ2ψW1τ μ(T,p,t)RN (p)W3(p)W2(p),
(Π.37)
Wz2x(p,t) = χ2ψW21τ μ(T,p,t)RN (p)W3(p)W2(p) + W2(p),
где использованы обозначения:
W1τ (p) = W1(p)e-pτ , W21τ (p) = W2(p)W1(p)e-pτ ,
(Π.38)
[
]-1
RN(p) =Wd(p) I -DNμ(T,p,-τ)Wd(p)
Поэтому ППМ Wzx(p, t) от входа x(t) к выходу z(t) (4.2) имеет стандарт-
ную форму
(Π.39)
(p).
Wzx(p,t) = φLτ μ(T,p,t)RN (p)M(p) +K
Здесь
(Π.40)
Lτ (p) =L(p)e-pτ
и аналогично предыдущему
[
]
[
]
K1(p)
L1(p)
(Π.41)
K(p) =
,
L(p) =
,
K2(p)
L2(p)
28
где
K1(p) = 0, K2(p) = W2(p),
(Π.42)
L1(p) = χ2W1(p), L2(p) = W2(p)W1(p),
M (p) = W3(p)W2(p), N(p) = W3(p)W2(p)W1(p).
Из приведенных соотношений и теоремы 4 из [20] следует, что системы S0
и
S0 - H2-эквивалетны в смысле [20] и им соответствует единая порождающая
расширенная стандартная систем
Sτ .
Доказательство теоремы 3. Пусть имеем непонижаемые левые и
правые MFD (ILMFD и IRMFD) [22]
(Π.43)
ri
(p), i = 1, 2, 3,
где в силу (Π.15)
(Π.44)
deg det aℓi(p) = deg det ari(p) = ψi.
Из (Π.42) и (Π.43) следует
(Π.45)
(p)bℓ2
(p).
ℓ2
Из (3.4) вытекает
MdegM(p) = ψ2 + ψ3.
Поэтому существует ILMFD
(Π.46)
(p)bℓ4
(p),
ℓ4
в котором
(Π.47)
det aℓ4(p) ∼ det aℓ2
(p),
где символ ∼ означает эквивалентность полиномиальных матриц [22, 23] и, в
частности, скалярных полиномов. Поэтому справедливо равенство
(Π.48)
deg det aℓ4(p) = deg det aℓ2(p) = ψ2.
С помощью (Π.46) получаем MFD
(Π.49)
(p),
M (p) = a-1M(p)BM
где
(Π.50)
aM (p) = aℓ4(p)aℓ3(p), bM (p) = bℓ4(p)bℓ2
(p),
29
причем
(Π.51)
deg det aM (p) = ψ2 + ψ3
= MdegM(p).
Равенство (Π.51) означает, что правая часть (Π.49) - это ILMFD. Продол-
жая вычисления, используем равенство
(Π.52)
N (p) = W3(p)W2(p)W1(p) = M(p)W1
(p).
С помощью (Π.43) при i = 1 и (Π.49) получаем, что
(Π.53)
1
(p)b1
(p).
При выполнении (3.4) существует ILMFD
(Π.54)
(p)bℓ5
(p),
ℓ5
где
det aℓ5(p) ∼ det aℓ1(p),
(Π.55)
deg det aℓ5(p) = deg det aℓ1(p) = ψ1.
С учетом (Π.54) из (Π.52) получается ILMFD
(Π.56)
(p)bℓN
(p),
N
где
(Π.57)
aℓN(p) = aℓ5(p)aM (p), bℓN (p) = bℓ5(p)bM
(p),
причем по построению
(Π.58)
deg det aℓN (p) = ψ1 + ψ2 + ψ3
= MdegN(p).
Из (Π.55) и (Π.57) в силу доказанного в [21] следует, что полюса матри-
цы W1(p) являются фиксирующими.
Для доказательства утверждения, относящегося к матрице W3(p), исполь-
зуем (3.3) в виде
[
]
χ2I
(Π.59)
L(p) =
W1
(p).
W2(p)
Аналогично предыдущему с помощью (Π.59) устанавливается, что
(Π.60)
MdegL(p) ≤ ψ2 + ψ1.
В то же время из (3.3) имеем
(Π.61)
MdegL(p) ≥ ψ1 + ψ2.
30
Сопоставляя (Π.60) и (Π.61), находим, что
(Π.62)
MdegL(p) = ψ1 + ψ2.
Из (Π.62) вытекает существование IRMFD
(Π.63)
L
(p),
где
(Π.64)
deg det ar L(p) = ψ1 + ψ2.
Из (Π.63) следует, что произведение
[
]
χ2W1(p)
(Π.65)
L(p)ar ¯L(p) =
arL
(p)
W2(p)W1(p)
— п олиномиальная матрица. Следовательно, произведение
(Π.66)
=bL
(p)
— тоже полиномиальная матрица. Из (Π.66) находим правое MFD
(Π.67)
L
(p),
которое в силу (3.4) непонижаемо. С помощью (Π.43) и (Π.67) находим
(Π.68)
(p).
3
L
При выполнении (3.4) имеем
(Π.69)
(p),
3
4
где правая часть - IRMFD. Подставляя (Π.69) в (Π.68), приходим к IRMFD
(Π.70)
N
(p),
где
(Π.71)
arN(p) = arL(p)ar4(p), brN(p) = bL(p)br4(p).
Сопоставляя IRMFD (Π.66) и (Π.70) на основании результатов [21] полу-
чаем, что полюса матрицы W3(p) являются фиксирующими.
31
СПИСОК ЛИТЕРАТУРЫ
1.
Kwakernaak H., Sivan R. Linear Optimal Control Systems. N.Y.: Wiley-Interscience,
a Division of John Wiley & Sons, Inc., 1972.
2.
Ackermann J. Abtastregelung. Berlin: Springer-Verlag, 3 ed., 1988.
3.
Astrom K.J.,Wittenmark B. Computer Controlled Systems: Theory and Design.
Englewood Cliffs, NJ: Prentice-Hall, 3rd ed., 1997.
4.
Chen T., Francis B.A. Optimal sampled-data control systems. Berlin-Heidelberg-
N.Y.: Springer-Verlag, 1995.
5.
Fridman E., Shaked U. Sampled-Data H∞ State Feedback Control of Systems with
State Delays // Int. J. Control. 2000. V. 73. No. 12. P. 1115-1128.
6.
Khargonekar P.P., Yamamoto J. Delayed Signal Reconstruction Using Sampled-
Data Control
// Proc.
35th IEEE Conf. on Decision Contr. Kyoto.
1996.
P. 1259-1263.
7.
Yamamoto Y., Hara S. Performance Lower Bound for a Sampled-Data Signal
Reconstruction / V. Blondel, E. Sontag, M. Vidyasagar, J. Willems eds. Open
Problems in Mathematical Systems and Control Theory. London: Springer-Verlag,
1998. P. 277-279.
8.
Lennartson B. Sampled-Data Control for Time-Delayed Plants // Int. J. Control.
1989. V. 49. P. 1601-1614.
9.
Hara S., Fujioka H., Kabamba P.T. A Hybrid State-Space Approach to Sampled-
Data Feedback Control // Linear Algebra Appl. 1994. P. 679-712.
10.
Wittenmark B. Sampling of a System with Time Delay // IEEE Trans. Autom.
Control. May 1985. V. AC-30. P. 507-510.
11.
Jugo J. Discretization of Continuous Time-Delay Systems // Proc. 15th IFAC
Triennial World Congr. V. Linear systems/Time-delay systems. P. REG1450,
Barcelona, 2002.
12.
Polyakov K.Yu. H2-optimal Sampled-Data Control of Plants with Multiple Input
and Output Delays // Asian J. Control. June 2006. V. 8. No. 2. P. 107-116.
13.
Emilia Fridman Introduction to Time-Delay Systems. Analysis and Control //
Cham-Heidelberg-N.Y.-Dordrecht-London: Springer, 2014.
14.
Mirkin L., Shima T., Tadmor G. Analog Loop Shifting in H2 Optimization of
Input-Delay Sampled-Data Systems // 52nd IEEE Conf. on Decision and Control.
December 10-13, 2013, Florence, Italy.
15.
Mirkin L., Shima T., Tadmor G. Sampled-Data H2 Optimization of Systems with
I/O Delays via Analog Loop Shifting // IEEE Trans. Autom. Control. March 2014.
V. 59. No. 3. P. 787-791.
16.
Розенвассер Е.Н. Линейная теория цифрового управления в непрерывном вре-
мени. М.: Наука, 1994.
17.
Rosenwasser E.N., Lampe B.P. Digitale Regelung in kontinuierlicher Zeit - Analyse
und Entwurf im Frequenzbereich. B.G. Teubner, Stuttgart, 1997.
18.
Rosenwasser E.N., Lampe B.P. Computer Controlled Systems - Analysis and Design
with Process-orientated Models. London-Berlin-Heidelberg: Springer-Verlag, 2000.
19.
Лямпе Б.П., Розенвассер Е.Н. H2-оптимизация импульсных систем с запазды-
ванием на основе метода параметрической передаточной матрицы // АиТ. 2010.
№ 1. С. 49-69.
Lampe B.P., Rosenwasser E.N. H2-optimization of Time-Delayed Sampled-Data
Systems on the Basis of the Parametric Transfer Matrix Method // Autom. Remote
Control. 2010. V. 71. No. 1. P. 49-69.
32
20. Розенвассер Е.Н., Лямпе Б.П., Древело В., Яйнш Т. Стандартизируемость и H2-
оптимизация импульсных систем с множественными запаздываниями // АиТ.
2019. № 3. С. 26-44.
Rosenwasser E.N., Lampe B.P., Drewelow W., Jeinsch T. Standardizability and H2-
Optimization of Sampled-Data Systems with Multiple Delays // Autom. Remote
Control. 2019. V. 80. No. 3. P. 413-428.
21. Rosenwasser E.N., Lampe B.P. Multivariable Computer-Controlled Systems —
A Transfer Function Approach. London: Springer, 2006.
22. Kailath T. Linear Systems. Englewood Cliffs, NJ: Prentice Hall, 1980.
23. Гантмахер Ф.Р. Теория матриц. М.: ГИТТЛ, 1954.
Статья представлена к публикации членом редколлегии А.А. Бобцовым.
Поступила в редакцию 01.03.2019
После доработки 29.04.2019
Принята к публикации 18.07.2019
33