Автоматика и телемеханика, № 10, 2020
© 2020 г. М.М. ХРУСТАЛЕВ, д-р физ.-мат. наук (mmkhrustalev@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ТЕРМИНАЛЬНАЯ ИНВАРИАНТНОСТЬ КВАЗИЛИНЕЙНЫХ
ДИФФУЗИОННЫХ СТОХАСТИЧЕСКИХ СИСТЕМ,
НЕЛИНЕЙНЫХ ПО УПРАВЛЕНИЮ1
Полученные ранее условия терминальной инвариантности стохастиче-
ских систем диффузионного типа конкретизируются для квазилинейных
систем нелинейных по управлению и даются рекомендации по синтезу
управлений, обеспечивающих терминальную инвариантность.
Ключевые слова: стохастическая система, управление, терминальная ин-
вариантность.
DOI: 10.31857/S0005231020100049
1. Введение
Важной задачей теории управления динамическими системами является
задача синтеза стратегии управления, обеспечивающей постоянное значение
терминального критерия (в общем случае векторного) независимо от дейст-
вующих на систему детерминированных, но заранее не известных, перемен-
ных во времени возмущений. Эту задачу Л.И. Розоноэр назвал задачей сла-
бой инвариантности и получил для нее локальные необходимые условия [1].
Однако более естественен для этого вида инвариантности термин
¾терми-
нальная инвариантность¿, соответствующий термину ¾терминальное управ-
ление¿ в работах по управлению конечным состоянием объекта. В этой задаче
автором были получены необходимые и одновременно достаточные условия,
а в ее обобщении задаче абсолютной инвариантности достаточные усло-
вия [2].
В [3, 4] была поставлена новая задача теории инвариантности - задача
о терминальной инвариантности управляемых стохастических динамических
систем диффузионного типа. Для этой задачи были получены общие доста-
точные условия инвариантности [3, 4]. В [5] эти условия исследованы для
простого случая линейных стохастических систем. Данная работа является
непосредственным продолжением работ [3, 4]. В ней условия работ [3, 4] кон-
кретизируются для квазилинейных стохастических систем диффузионного
типа, нелинейных по управлению. Для этого класса систем они доводятся до
достаточно конструктивных алгоритмов синтеза стратегий управления, обес-
печивающих инвариантность. Так как будет изучаться только терминальная
инвариантность, слово ¾терминальная¿ далее будем опускать.
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (проект № 20-08-00400).
118
2. Формулировка задач терминальной инвариантности
Будем предполагать, что управляемая динамическая система описывается
векторным дифференциальным уравнением Ито:
(1)
dx(t) = f(t, x(t), u(t))dt + g(t, x(t), u(t))dw(t),
с начальным условием x(t0) = x0, где t ∈ [t0, t1]
время (tmin ≤ t0 < t1);
x := (x1, . . . , xn)T ∈ Rn состояние системы; w(t) := (w1(t), . . . , wq(t))T ∈ Rq,
w(t) = w(t - t0), где
w(·)
q-мерный стандартный винеровский процесс;
(·)T
операция транспонирования. Управление u(t) ∈ Rm представляет со-
бой сужение на интервал [t0, t1] фиксированной, непрерывной на полуоткры-
том интервале [tmin, t1) функции t → ũ(t) : [tmin, t1] → Rm. Далее, что не вы-
зовет недоразумений, функцию ũ(t) также будем называть управлением и
использовать для нее обозначение u(t). Начальная точка (t0, x0) и момент t1
заданы. Моменты времени tmin, t1 фиксированы в отличие от момента t0, ко-
торый может принимать различные значения.
Здесь будет рассматриваться частный случай системы (1), в которой функ-
ция f(t, x, u) имеет вид f(t, x, u) = A0(t, u)x + B0(t, u), а столбцы матрицы
g(t, x, u) задаются равенствами gk(t, x, u) = Ak(t, u)x + Bk(t, u), k = 1, q. Мат-
рицы Ak(t, u), Bk(t, u), k = 0, q, имеют соответствующие размеры, их элемен-
ты заданные на [tmin, t1] × Rm непрерывные функции. В результате рас-
сматриваемая система (1) имеет вид
∑
dx(t) = A0(t, u(t))x(t) + B0(t, u(t)) +
(Ak(t, u(t))x(t) + Bk(t, u(t)))dwk (t).
k=1
Более общий вид системы в форме (1) приведен здесь для того, чтобы удоб-
но было привести формулировки соответствующих теорем из [4], конкрети-
зированные для рассматриваемого здесь случая, необходимые для получения
результатов данной работы.
Частным случаем системы является система с афинной по состоянию стра-
тегией управления:
dx(t) = (α0(t)x(t) + β0(t)v(t, x(t)) + γ0(t))dt +
(2)
∑
+ (αk(t)x(t) + βk(t)v(t, x(t)) + γk(t))dwk(t),
k=1
где
(3)
v(t, x) = -L(t)x + L0(t) ∈ Rmv
- афинная стратегия управления.
Если через u(t) обозначить совокупность компонент матриц L(t) и L0(t) и
положить Ak(t, u) = αk(t) - βk(t)L, Bk(t, u) = βk(t)L0 + γk(t) при k = 0, q, то
система (2) примет вид системы (1).
119
Этот частный случай приведен, чтобы подчеркнуть, что для достижения
инвариантности системы исследуемого здесь типа иногда можно использо-
вать и афинную по состоянию обратную связь.
При сделанных выше предположениях в случае, когда управление u(t)
непрерывно на замкнутом интервале [tmin, t1], уравнение (1) для любой на-
чальной точки (t0, x0) ∈ B0, где B0 = [tmin, t1) × Rn, имеет сильное решение
[6, с. 484, теорема 1]. Действительно, условия указанной теоремы заведомо
выполнены, так как функции f(t, x, u) и g(t, x, u) в системе (1) непрерывны и
линейны по x. Если же управление u(t) непрерывно лишь на полуоткрытом
интервале [t0, t1), то факт существования решения уравнения (1) (сильного
или слабого) на интервале [t0, t1], как и в общих теоремах из [4], приходится
постулировать. Детальный комментарий по этому вопросу будет приведен в
разделе 3 после формулировки теорем из [4].
Далее всюду в теоретических построениях будем предполагать, что управ-
ление u(t) в системе (1) фиксировано. Для фиксированной начальной точки
через D(t0, x0) обозначим множество реализаций x(·) случайного процесса,
описываемого уравнением (1). Пусть также DΣ =
⋃D(t0,x0), (t0,x0) ∈ B0.
На множестве DΣ определим функционал (терминальный критерий):
1
(4)
J (x(·)) = F (x(t1)), F (x) =
xTGx + QT
x,
2
где G, Q- заданные постоянные матрицы соответствующих размеров (в [4]
считается, что F (x) произвольная функция из C2(Rn)).
Определение 1. Динамическую систему
(1) при фиксированном
управлении u(t) будем называть инвариантной по возмущениям, если для
любой фиксированной начальной точки (t0, x0) ∈ B0 критерий (4) прини-
мает постоянное значение Jc(t0, x0) с вероятностью 1 на множестве
D(t0, x0).
Определение 2. Динамическую систему
(1) при фиксированном
управлении u(t) будем называть абсолютно инвариантной, если крите-
рий (4) принимает одно и то же постоянное значение Jac на множе-
стве DΣс вероятностью 1 для каждой начальной точки (t0,x0) ∈ B0.
Целью выбора управления u(t) является обеспечение инвариантности си-
стемы (1) в смысле определения 1 или 2.
3. Достаточные условия терминальной инвариантности
Следуя [4], введем в рассмотрение множество Φ функций (t, x) → ϕ(t, x) :
[tmin, t1] × Rn → R1, имеющих непрерывные производные ϕt, ϕx = (ϕx1 ,
...,ϕxn)T ∈ Rn, ϕxx = {ϕxixj}, i,j = 1,n, множество M непрерывных функ-
ций t → µ(t) : [tmin, t1] → R1 и обозначим:
1
K(t, x, u) = ϕt(t, x) + ϕTx(t, x)f(t, x, u) +
tr[σ(t, x, u)ϕxx(t, x)],
2
S(t, x, u) = ϕTx(t, x)g(t, x, u),
120
где
σ(t, x, u) = g(t, x, u)gT(t, x, u).
В [4] получены достаточные условия инвариантности (по возмущениям и
абсолютной) для управляемых стохастических систем диффузионного типа с
позиционными стратегиями управления и дополнительным детерминирован-
ным возмущением, которые без изменений справедливы и в случае программ-
ного управления при отсутствии детерминированных возмущений. Приведен-
ные ниже теоремы 1, 2 являются формальной конкретизацией теорем из [4]
на изучаемый здесь случай. Следствие из теоремы 2 и замечания 1-3 также
перенесены из [4].
Теорема 1. 1. Для того чтобы система (1) была инвариантна по воз-
мущениям, достаточно существования функций ϕ ∈ Φ, µ ∈ M, таких что
1) ϕ(t1, x) = F (x), x ∈ Rn,
для всех x ∈ Rn, t ∈ [tmin, t1) выполнены условия:
2) K(t, x, u(t)) = µ(t),
3) S(t, x, u(t)) = 0.
2. Если условия п. 1 теоремы выполнены, то для любой фиксированной
начальной точки (t0, x0) ∈ B0 критерий (4) принимает постоянное значе-
ние
∫t1
Jc(t0,x0) = ϕ(t0,x0) + µ(t)dt
t0
с вероятностью 1 на множестве D(t0, x0).
Теорема 2. 1. Для того чтобы система (1) была абсолютно инвари-
антна, достаточно существования функции ϕ ∈ Φ, функции µ ∈ M и по-
стоянной A > 0, таких что
1) ϕ(t1, x) = F (x), x ∈ Rn,
для всех x ∈ Rn, t ∈ [tmin, t1) выполнены условия:
2) K(t, x, u(t)) = (µ(t) - Aϕ(t, x))(t1 - t)-1,
3) S(t, x, u(t)) = 0.
2. Если условия п. 1 теоремы выполнены, то для всех (t0, x0) ∈ B0 с веро-
ятностью 1 на множестве D(t0, x0) справедливо равенство:
µ(t1)
J (x(·)) = F (x(t1)) = Jac, Jac =
A
В [4, с. 85, следствие 3], кроме теорем 1, 2, имеется следующий результат.
Следствие. Если в теореме 2 A > 1 и µ(t) ≡ 0, то для каждой точки
(t0, x0) ∈ B0 с вероятностью 1 для реализаций x(·) ∈ D(t0, x0) при почти
всех t ∈ [t0, t1] справедливо равенство:
K(t, x(t), u(t)) = -Aϕ(t0, x0)(t1 - t0)-A(t1 - t)A-1,
121
или, что то же самое,
(5)
ϕ(t, x(t)) = C(t0, x0)(t1 - t)A, C(t0, x0) = Aϕ(t0, x0)(t1 - t0)-A.
Этот результат понадобится при анализе примеров в разделе 5.
Замечание 1. Если терминальных условий несколько, можно считать,
что критерий (4) векторный, и записать условия теоремы 1 или 2 для каждой
компоненты критерия.
Замечание 2. В [4, с. 85, замечание 4] отмечается, что при достаточно
слабых предположениях без уменьшения общности можно считать, что µ(t)≡
≡ 0.
Замечание 3. Из самого определения абсолютной инвариантности сле-
дует, что для наличия этого свойства у системы (1) достаточно, чтобы усло-
вия теоремы 2 выполнялись для почти всех реализаций случайного процесса
лишь в моменты времени малого интервала [t1 - ε, t1). Величина числа ε > 0
может быть различной для каждой реализации.
Замечание 4. Как указывалось в разделе 2, в случае, когда управле-
ние u(t) непрерывно лишь на полуоткрытом интервале [tmin, t1), возникает
проблема с доказательством существования решения (сильного или слабого)
системы (1).
Общая рекомендация следующая. В каждой прикладной задаче или мо-
дельном примере следует пытаться провести такое доказательство. Особенно
плохая ситуация возникает в случае теоремы 2 об абсолютной инвариантно-
сти в связи с тем, что условие 2) теоремы содержит сингулярность в точке
t = t1, которая приведет к сингулярности управления. Однако здесь может
помочь тот факт, что существование решения нужно доказать при фиксиро-
ванной начальной точке (t0, x0). В этом случае использование равенства (5)
позволяет при A > 1 ликвидировать сингулярность в условии 2) теоремы 2.
Во всех приведенных в разделе 6 примерах соответствующее обоснование вы-
полнено.
Если такое обоснование существования решения в сложных прикладных
задачах провести не удается, то условия теорем можно использовать, как
эвристическое средство синтеза инвариантной системы и проверять ее рабо-
тоспособность численным моделированием.
Замечания 3, 4 справедливы и в отношении ниже следующих теорем 2а,
2б, 2в, конкретизирующих теорему 2.
Конкретизируем теоремы 1, 2 для рассматриваемой здесь задачи с квази-
линейным уравнением системы (1). Функцию ϕ(t, x) возьмем в виде
1
(6)
ϕ(t, x) = ψT(t)x +
xT
Λ(t)x + ξ(t),
2
где векторная функция ψ(t) ∈ Rn, матричная функция Λ(t) и скалярная
функция ξ(t) предполагаются непрерывно дифференцируемыми на интер-
вале [tmin, t1]. Тогда условие 1) теорем 1, 2 приобретает форму ψ(t1) = Q,
Λ(t1) = G, ξ(t1) = 0; а функции K(t, x, u) и S(t, x, u) в условиях 2), 3) этих
122
теорем имеют вид
(
)
∑
∑
dξ
1
dψT
K =
+ψTB0 +
BTkΛBk +
+ψTA0 + BT0Λ + BTΛAk x +
k
dt
2
dt
k=1
k=1
(
)
∑
1
dΛ
+
xT
+ ΛA0 + AT0 Λ + ATΛAk x,
k
2
dt
k=1
S = (S1,S2,...,Sq),
1
Sk = ψTBk + (ψTAk + BTkΛ)x +
xT(ΛAk + ATkΛ)x, k = 1,q.
2
В результате теоремы 1 и 2 принимают следующий вид.
Теорема 1a. Пусть система (1), функция ϕ вида (6) и функция µ ∈ M
таковы, что:
1. а) ψ(t1) = Q,
б) Λ(t1) = G,
в) ξ(t1) = 0;
при всех t ∈ [tmin,t1) выполнены условия:
∑
dξ(t)
1
2. а)
+ BT0 (t,u(t))ψ(t) +
BTk(t,u(t))Λ(t)Bk(t,u(t)) = µ(t),
dt
2
k=1
dψ(t)
б)
+ AT0 (t,u(t))ψ(t) + Λ(t)B0(t,u(t)) +
dt
∑
+ ATk(t,u(t))Λ(t)Bk(t,u(t)) = 0,
k=1
dΛ(t)
в)
+ Λ(t)A0(t, u(t)) + AT0 (t, u(t))Λ(t) +
dt
∑
+ ATk(t,u(t))Λ(t)Ak(t,u(t)) = 0;
k=1
при всех k = 1,q справедливы равенства:
3. а) BTk(t, u(t))ψ(t) = 0,
б) ATk(t, u(t))ψ(t) + Λ(t)Bk(t, u(t)) = 0,
в) Λ(t)Ak(t, u(t)) + ATk(t, u(t))Λ(t) = 0.
Тогда система (1) инвариантна по возмущениям, при этом
∫t1
1
(7)
Jc(t0,x0) = ψT(t0)x0 +
xT0Λ(t0)x0 + ξ(t0) +
µ(t)dt.
2
t0
Теорема 2a. Пусть система (1), функция ϕ вида (6), функция µ ∈ M и
постоянная A > 0 таковы, что выполнены условия 1, 3 теоремы 1а и при
всех t ∈ [tmin, t1) условия:
123
∑
dξ(t)
1
µ(t) - Aξ(t)
2. а)
+BT0(t,u(t))ψ(t)+
BTk(t,u(t))Λ(t)Bk(t,u(t)) =
,
dt
2
t1 - t
k=1
∑
dψ(t)
б)
+AT0(t,u(t))ψ(t)+Λ(t)B0(t,u(t))+
ATk(t,u(t))Λ(t)Bk(t,u(t)) =
dt
k=1
A
=-
ψ(t),
t1 - t
∑
dΛ(t)
в)
+Λ(t)A0(t, u(t))+AT0(t, u(t))Λ(t)+
ATk(t,u(t))Λ(t)Ak(t,u(t)) =
dt
k=1
A
=-
Λ(t).
t1 - t
Тогда система (1) абсолютно инвариантна, при этом
µ(t1)
(8)
Jac =
A
4. Частные случаи линейный критерий, линейная система
Рассмотрим частный случай, когда критерий инвариантности линеен по
состоянию:
(9)
J (x(·)) = QT
x.
Он получается, если в (4) положить G = 0. В этом случае функцию ϕ также
можно взять линейной:
(10)
ϕ(t, x) = ψT
(t)x + ξ(t),
положив в (6) Λ(t) ≡ 0. В результате условия инвариантности сильно упро-
щаются. Эти условия содержатся в нижеследующих теоремах 1б, 2б, непо-
средственно вытекающих из теорем 1а, 2а.
Теорема 1б. Пусть система (1), функция ϕ вида (10) и функция µ ∈ M
таковы, что:
1. а) ψ(t1) = Q,
б) ξ(t1) = 0;
при всех t ∈ [tmin,t1) выполнены условия:
dξ(t)
2. а)
+ BT0 (t,u(t))ψ(t) = µ(t),
dt
dψ(t)
б)
+ AT0 (t,u(t))ψ(t) = 0;
dt
при всех k = 1,q справедливы равенства:
3. а) BTk(t, u(t))ψ(t) = 0,
б) ATk(t, u(t))ψ(t) = 0.
124
Тогда система (1) инвариантна по возмущениям, при этом
∫t1
(11)
Jc(t0,x0) = ψT(t0)x0 + ξ(t0) +
µ(t)dt.
t0
Теорема 2 б. Пусть система (1), функция ϕ вида (10), функция µ∈M
и постоянная A > 0 таковы, что выполнены условия 1, 3 теоремы 1б и при
всех t ∈ [tmin, t1) условия:
dξ(t)
µ(t) - Aξ(t)
2. а)
+ BT0 (t,u(t))ψ(t) =
,
dt
t1 - t
dψ(t)
A
б)
+ AT0 (t,u(t))ψ(t) = -
ψ(t).
dt
t1 - t
µ(t1)
Тогда система (1) абсолютно инвариантна, при этом Jac =
A
Рассмотрим еще более частный случай, когда система (1) не содержит
мультипликативных возмущений - линейна по состоянию и винеровскому
процессу, но в общем случае нелинейна по управлению. Такая система полу-
чается, если положить Ak(t, u) = 0, k = 1, q. Критерий инвариантности также
линеен вида (9). Результат представлен в теоремах 1в, 2в.
Теорема 1в. Пусть система (1), функция ϕ вида (10) и функция µ ∈ M
таковы, что:
1. а) ψ(t1) = Q,
б) ξ(t1) = 0;
при всех t ∈ [tmin,t1) выполнены условия:
dξ(t)
2. а)
+ BT0 (t,u(t))ψ(t) = µ(t),
dt
dψ(t)
б)
+ AT0 (t,u(t))ψ(t) = 0;
dt
при всех k = 1,q справедливы равенства:
3. BTk(t, u(t))ψ(t) = 0.
Тогда система (1) инвариантна по возмущениям, при этом
∫t1
Jc(t0,x0) = ψT(t0)x0 + ξ(t0) + µ(t)dt.
t0
Теорема 2 в. Пусть система (1), функция ϕ вида (10), функция µ ∈ M
и постоянная A > 0 таковы, что выполнены условия 1, 3 теоремы 1в и при
всех t ∈ [tmin, t1) условия:
dξ(t)
µ(t) - Aξ(t)
2. а)
+ BT0 (t,u(t))ψ(t) =
,
dt
t1 - t
dψ(t)
A
б)
+ AT0 (t,u(t))ψ(t) = -
ψ(t).
dt
t1 - t
µ(t1)
Тогда система (1) абсолютно инвариантна, при этом Jac =
A
125
Доказательства теорем 1а, 2а, 1б, 2б, 1в, 2в состоят в записи условий тео-
рем 1, 2 для соответствующих частных случаев. При этом видно, что при
сужении общности задачи количество условий теорем сокращается.
5. Рекомендации по конструированию алгоритмов синтеза
инвариантных систем
Сначала рассмотрим случай инвариантности по возмущениям (теорема 1а).
Если компоненты управления u(t), входящие в условия 2 теоремы 1а, и
функция µ(t) заданы, то условия 2 совместно с граничными условиями 1 од-
нозначно определяют функции ξ(t), ψ(t) и Λ(t). Остается выполнить условия
3 теоремы. Их можно выполнить за счет выбора компонент управления u(t),
входящих в условия 3.
В частности, когда система (1) линейна (Ak(t, u) = 0, k = 1, q), критерий
инвариантности имеет вид (9) (линеен) и матрицы Bk(t, u), k = 1, q, линейны
по u, условия 3 теорем 1в, 2в имеют вид системы линейных уравнений от-
носительно u. В этом случае нетрудно записать условия разрешимости этой
системы уравнений [5] и тем самым условия выполнимости условия 3 в тео-
ремах 1в, 2в.
Однако, если указанных компонент управления u(t) не достаточно для
выполнения условий 3, то задача усложняется. В этом случае приходится
использовать компоненты матрицы Λ(t) и вектора ψ(t), и тогда связи, на-
ложенные на функции Λ(t), ψ(t) в условиях 2, приходится компенсировать
за счет компонент вектора управления u(t), входящих в функцию f(t, x, u).
Такая схема применяется в примере 2, приведенном в разделе 6.
Особенно сложен для синтеза инвариантной системы случай линейно-
квадратичного критерия инвариантности вида (6) (G = 0). В этом случае
условие 3 теорем 1а, 2а содержит 1 + n(n + 3)/2 условий и создается впечат-
ление, что единственный случай, когда условия 3 можно выполнить, это
случай, когда за счет управления u(t) можно обнулить диффузионный член
уравнения (1), g(t, x, u(t)) = 0. Однако удалось привести нетривиальные при-
меры, рассеивающие это опасение (примеры 4, 4.1-4.5, 5 в разделе 6).
Выполнение условий теоремы 2а можно обеспечивать по описанной вы-
ше схеме для теоремы 1а. Однако, здесь все намного сложнее в связи с
тем, что условия 2 теоремы 2а содержат сингулярности, которые приходится
компенсировать соответствующими сингулярностями в компонентах управ-
ления u(t), входящих в функцию сноса f(t, x, u) (примеры 3, 5 в разделе 6).
6. Примеры
Пример 1.
dx1 = u24(x2 - x3)dt + x2dw,
(12)
dx2 = (x1 - x3)dt - x1dw,
dx3 = (-x2 + u4x1)dt + vdw.
126
Здесь
(13)
v(t, x) = u1(t)x1 + u2(t)x2 + u3(t)x3, u4 = u4(t), t ∈ [tmin, 0], tmin
< 0,
стратегии управления. Критерий инвариантности по возмущениям имеет
вид
(14)
J =x3
(0).
Заметим, что в соответствии с общей постановкой задачи в этом приме-
ре и всех последующих начальная точка (t0, x0) выбирается произвольно из
множества B0 = [tmin, t1) × Rn и система должна быть инвариантна для всех
таких начальных точек. В этом примере t1 = 0, n = 3.
Применим теорему 1б. Функцию µ(t) положим тождественно равной нулю,
µ(t) ≡ 0. Так как в этом примере B0(t, u) ≡ 0, то из условий 1, 2 теоремы
следует, что ξ(t) ≡ 0.
Стратегии управления
1
(15)
v(t, x) =
(ψ2(t)x1 - ψ1(t)x2), u4
(t) = 1
ψ3(t)
и функции
(16)
ψ1(t) = 1 - et, ψ2(t) = -1 + et, ψ3
(t) = 1
обеспечивают выполнение всех условий теоремы 1б. Подставляя выражения
(16) в (15), получим окончательные выражения для стратегий v(t, x) и u4(t):
(17)
v(t, x) = (et - 1)(x1 + x2), u4
(t) = 1.
Терминальное значение критерия вычисляется по формуле (11): Jc =
= (1 - et0 )(x10 - x20).
Пример 2. Рассмотрим ту же управляемую систему (12), (13), что и в
примере 1, с тем же критерием инвариантности по возмущениям (14). Реше-
ние задачи терминальной инвариантности как правило не единственно, и это
можно использовать для выполнения дополнительных условий на стратегии
управления. В примере 1 стратегия управления v(t, x) зависит от перемен-
ных состояния x1 и x2. Оказывается можно дать другое решение задачи с
зависимостью v(t, x) только от переменной x1.
Функции µ(t) ≡ 0 , ξ(t) ≡ 0, ψ1(t) = 0, ψ2(t) = sh(t), ψ3(t) = ch(t) и стра-
тегии v(t, x) =ψ2(t)ψx1 = x1 th(t), u4(t) = -ψ2(t)ψ
= -th(t) удовлетворяют всем
3(t)
3(t)
условиям теоремы 1б.
Инвариантное значение критерия вычисляется по формуле (11):
Jc(t0,x0) = x20 sh(t0) + x30 ch(t0).
127
Пример 3 (абсолютная инвариантность).
dx1 = (x2 - x3 + v2)dt + x2dw,
(18)
dx2 = (x1 - x3)dt - x1dw,
dx3 = (x1 - x2)dt + v1dw.
Здесь
v1(t,x) = u1(t)x1 + u2(t)x2 + u3(t)x3, v2(t,x) = u4(t)x1 + u5(t)x2 + u6(t)x3
стратегии управления. Критерий терминальной инвариантности имеет тот
же вид, что и в примерах 1, 2, но здесь требуется обеспечить абсолютную
инвариантность.
Для решения задачи применим теорему 2б. Здесь, как и в предыдущих
примерах, положим µ(t) ≡ 0, и тогда, как и в примерах 1, 2, ξ(t) ≡ 0. Ком-
поненты вектор-функции ψ(t) возьмем такими же, как в примере 1 (равен-
ства (16)), так что функция ϕ(t, x) имеет вид (10):
(19)
ϕ(t, x) = ψ1(t)x1 + ψ2(t)x2 + ψ3(t)x3 = (1 - et)(x1 - x2) + x3.
В этом случае условие 3 будет выполнено, если стратегию v1(t, x) выбрать
совпадающей со стратегией v(t, x) в примере 1 (равенства (15), (17)):
(20)
v1(t,x) = (et - 1)(x1 + x2
).
Для выполнения векторного дифференциального уравнения 2б) теоре-
мы 2б следует выбрать стратегию v2(t, x) в виде
A
(21)
v2(t,x) =
(ψ1(t)x1 + ψ2(t)x2 + ψ3(t)x3
).
tψ1(t)
Если в (21) подставить выражения (16) для ψi(t), i = 1, 3, то стратегия v2(t, x)
приобретает следующий конкретный вид:
A
A
A
(22)
v2(t,x) =
x1 -
x2 +
x3.
t
t
t(1 - et)
Нетрудно видеть, что стратегия v2(t, x) имеет сингулярность в окрестно-
сти конечной точки движения t1 = 0. Однако, если использовать следствие
из теоремы 2, конкретизацией которой является теорема 2б, то можно уста-
новить, что почти для всех реализаций случайного процесса x(·), исходящих
из начальной точки (t0, x0), функция v2(t, x(t)) одна и та же:
(23)
v2(t,x(t)) = v(t;t0,x0)
и эта функция при A ≥ 2 ограничена, а при A > 2
(24)
lim
v(t; t0, x0
) = 0.
t→-0
128
Действительно, учитывая (19), (21), стратегию v2(t, x) можно представить в
виде
A
v2(t,x) =
ϕ(t, x).
tψ1(t)
А тогда, учитывая равенство (5) и вид функции ψ1(t) (равенства (16)), будем
иметь:
A
(25)
v2(t,x(t)) =
C(t0, x0)(-t)A.
t(1 - et)
Из равенства (25) следует справедливость равенства (23), ограниченность
функции v(t; t0, x0) при A ≥ 2 и выполнение равенства (24) при A > 2.
В результате сильное решение системы (18) при фиксированном началь-
ном условии x(t0) = x0 существует [6, стр. 484] и полученные стратегии
управления (20), (22) обеспечивают абсолютную инвариантность относитель-
но критерия (14). Терминальное значение критерия для всех начальных точек
(t0, x0) ∈ (-∞, 0) × R3 одно и то же и равно нулю (с вероятностью 1).
Пример 4.
dx1 = (a11x1 + a12x2)dt + (b11x1 + b12x2)dw,
(26)
dx2 = (a21x1 + a22x2)dt + (b21x1 + b22x2)dw.
Система (26) не содержит управлений в явном виде. Считается, что век-
торное управление u(t) уже подставлено в систему. Используя соответству-
ющие теоремы из разделов 3, 4, запишем условия на коэффициенты систе-
мы, которые обеспечат инвариантность. Имеющиеся в этих коэффициентах
управления должны обеспечить выполнение этих условий. Коэффициенты
системы (26) в общем случае могут быть функциями переменной t.
Критерий инвариантности (по возмущениям или абсолютной) имеет вид
1
1
(27)
J =
x21(0) +
x22(0), t ∈ [tmin,0], tmin
< 0.
2
2
Критерий (27) квадратичен. В связи с этим будем использовать теоремы 1а
и 2а. Сначала исследуем более простой случай инвариантности по возмуще-
ниям (теорема 1а).
Выпишем условия теоремы 1а для системы (26), положив µ(t) ≡ 0. Усло-
вие
1
примет вид:
1. а) ψ1(0) = 0, ψ2(0) = 0, б) Λ11(0) = 1, Λ12(0) = 0,
Λ22(0) = 1, в) ξ(0) = 0. Нетрудно установить, что из этих условий и усло-
вий 2а), 2б) следует, что ξ(t) ≡ 0, ψ(t) ≡ 0 и условия 3а), 3б) выполняются
тривиально.
В результате остаются следующие условия:
(28)
Λ11(0) = 1, Λ12(0) = 0, Λ22
(0) = 1;
dΛ11
+ 2a11Λ11 + 2a21Λ12 + b221Λ22 = 0,
dt
129
dΛ12
(29)
+ a12Λ11 + (a11 + a22 + b11b22 - b12b21)Λ12 + a21Λ22
= 0,
dt
dΛ22
+ b212Λ11 + 2a12Λ12 + 2a22Λ22 = 0;
dt
b11Λ11 + b21Λ12 = 0,
(30)
b12Λ11 + (b11 + b22)Λ12 + b21Λ22
= 0,
b12Λ12 + b22Λ22 = 0.
Пример 4.1. Пусть в задаче примера 4
(31)
b11 = 0, b22 = 0, Λ12
(t) ≡ 0.
Тогда для инвариантности по возмущениям должны быть выполнены
условия:
dΛ11
dΛ22
+ 2a11Λ11 + b221Λ22 = 0,
+ b212Λ11 + 2a22Λ22 = 0;
dt
dt
a12Λ11 + a21Λ22 = 0, b12Λ11 + b21Λ22 = 0.
Пример 4.2. Пусть дополнительно к условиям (31) примера 4.1 вы-
полнены условия: a12 = -a21, a11 = a22, b12 = -b21. Тогда можно положить
Λ11 = Λ22 = Λ, и для инвариантности по возмущениям должно быть выпол-
нено единственное условие:
dΛ
+ (2a11 + b212)Λ = 0, Λ(0) = 1.
dt
Пример 4 .3. Наложим на коэффициенты системы (26) следующие усло-
вия: b11 = -αΛ12, b12 = -αΛ22, b21 = αΛ11, b22 = αΛ12, где α постоянная
или заданная функция переменной t.
В этом случае условия (30) будут выполнены, и для инвариантности по
возмущениям достаточно, чтобы функции Λ11(t), Λ12(t), Λ22(t) удовлетворяли
системе дифференциальных уравнений
dΛ11
+ 2a11Λ11 + 2a21Λ12 - α2Λ11Λ212 + α2Λ211Λ22 = 0,
dt
dΛ12
(32)
+ a12Λ11 + (a11 + a22)Λ12 + a21Λ22 - α2Λ312 + α2Λ11Λ12Λ22 = 0,
dt
dΛ22
+ 2a22Λ22 + 2a12Λ12 - α2Λ22Λ212 + α2Λ11Λ222 = 0
dt
с граничными условиями
(33)
Λ11(0) = 1, Λ12(0) = 0, Λ22
(0) = 1.
Сложность в этом примере состоит в том, что уравнения (32) нелинейны
и их решение может существовать не для любого интервала [tmin, 0], tmin < 0.
Тем не менее для достаточно близкого к нулю tmin оно обязательно существу-
ет.
130
Пример 4 .4. Дополнительно к условиям примера 4.3 потребуем, чтобы
Λ12(t) ≡ 0, тогда нужно считать, что b11 = b22 = 0. В этом случае условия
(32), (33), гарантирующие инвариантность, примут более простой вид:
dΛ11
+ 2a11Λ11 + α2Λ211Λ22 = 0,
dt
(34)
a12Λ11 + a21Λ22 = 0,
dΛ22
+ 2a22Λ22 + α2Λ11Λ222 = 0;
dt
(35)
Λ11(0) = 1, Λ22
(0) = 1.
Пример 4 .5. Условия (34), (35) можно упростить еще больше, потре-
бовав в дополнение к условиям примера 4.4 выполнение следующих усло-
вий: a11 = a22, a12 = -a21. В этом случае Λ11(t) = Λ22(t) = Λ(t), b12 = -αΛ,
b21 = αΛ и функция Λ(t) должна удовлетворять уравнению
dΛ
(36)
+ 2a11Λ + α2Λ3
= 0, Λ(0) = 1.
dt
Если a11 < 0 и d = -2a11
≥ 1, то решение уравнения (36) существует, опре-
α2
делено на интервале (-∞, 0] и имеет вид:
√
d
Λ(t) =
1 + (d - 1)e4a11t
При a11 < 0 и d < 1 решение определено на интервале (t∗, 0], где t∗ =
=-14a
ln(1 - d). При a11 < 0 и d = 1 Λ(t) ≡ 1. Терминальное значение кри-
11
терия определяется равенством (7): Jc(t0, x0) = Λ(t0)(x210 + x220).
Пример 4. 6 (абсолютная инвариантность).
Пусть в системе (26) b11 = b22 = 0, b12 = -b21, a11 = a22, a12 = a21.
Модифицируем полученную систему, добавив в первое и второе уравнения
управления v1(t, x), v2(t, x). В результате получим систему
dx1 = (a11x1 + a12x2 + v1)dt + b12x2dw,
(37)
dx2 = (-a12x1 + a11x2 + v2)dt - b12x1dw.
Критерий абсолютной инвариантности по-прежнему имеет вид (27).
Функцию ϕ(t, x) возьмем в виде ϕ(t, x1, x2) =12 Λ(t)(x21 + x22), где Λ(t) удо-
влетворяет уравнению:dΛdt + (2a11 + b212)Λ = 0, Λ(0) = 1. Если положить
1A
1A
(38)
v1 =
x1, v2 =
x2
,
A > 2,
2 t
2 t
то все условия теоремы 2а будут выполнены.
131
V
q
P
m
mg
Рис. 1. Физическая интерпретация примера 4.6 - колебания маятника с по-
движным основанием.
Однако управления (38) содержат сингулярность в точке t = t1 = 0 и воз-
никает вопрос, обсуждавшийся в замечании 4, о существовании решения си-
стемы (37). Для разрешения этого вопроса подставим управления (38) в си-
стему (37) и сделаем в ней замену переменных:
1
1
x1 =
Aty1, x2 =
Aty2.
2
2
В результате для переменных y1, y2 получим линейную систему уравнений
dy1 = (a11y1 + a12y2)dt + b12y2dw, dy2 = (-a12y1 + a11y2)dt - b12y1dw,
которая, естественно, имеет сильное решение на интервале [tmin, 0], где tmin
любое отрицательное число. А тогда и система (37) имеет решение на том же
интервале.
Как следует из формулы (8), терминальное значение критерия (27) рав-
но нулю. Из этого очевидно следует, что для любых начальных условий с
вероятностью 1 x1(0) = 0, x2(0) = 0.
Для этого примера 4.6 можно дать физическое истолкование.
Рассмотрим процесс колебаний в вертикальной плоскости маятника
(рис. 1), состоящего из груза массы m, подвешенного на невесомом стержне
длины l, точка подвеса которого a может перемещаться горизонтально со
скоростью V (t). На груз m действует сила тяжести mg и перпендикулярная
к стержню l сила P (t) (например, тяга реактивного двигателя или механизм,
создающий момент силы относительно точки подвеса).
Величины V (t) и P (t) играют роль управлений и могут менять знак.
Линеаризованные уравнения движения маятника имеют вид
dθ
V
dω
P
g
(39)
=ω-
,
=
-
θ.
dt
l
dt
ml
l
132
x1(t)
6
4
2
-2,0
-1,5
-1,0
-0,5
0
t
-2
-4
-6
Рис. 2. Результаты моделирования трех реализаций случайного процесса для
различных начальных точек в примере 4.6, демонстрирующие абсолютную
инвариантность величины x1(0).
x2(t)
6
4
2
-2,0
-1,5
-1,0
-0,5
0
t
-2
Рис. 3. Результаты моделирования трех реализаций случайного процесса для
различных начальных точек в примере 4.6, демонстрирующие абсолютную
инвариантность величины x2(0).
√
√
g
l
Линейная замена переменных θ = x1, ω =
x2, t =
τ, V =-√glv1,
l
g
P = mgv2 приводит систему (39) к виду
dx1
dx2
(40)
=x2 +v1,
= -x1 + v2.
dτ
dτ
133
x2(t)
6
4
2
x1(t)
6
-2,0
-1,5
4
-1,0
2
-0,5
0
t
-2
-4
-6
-2
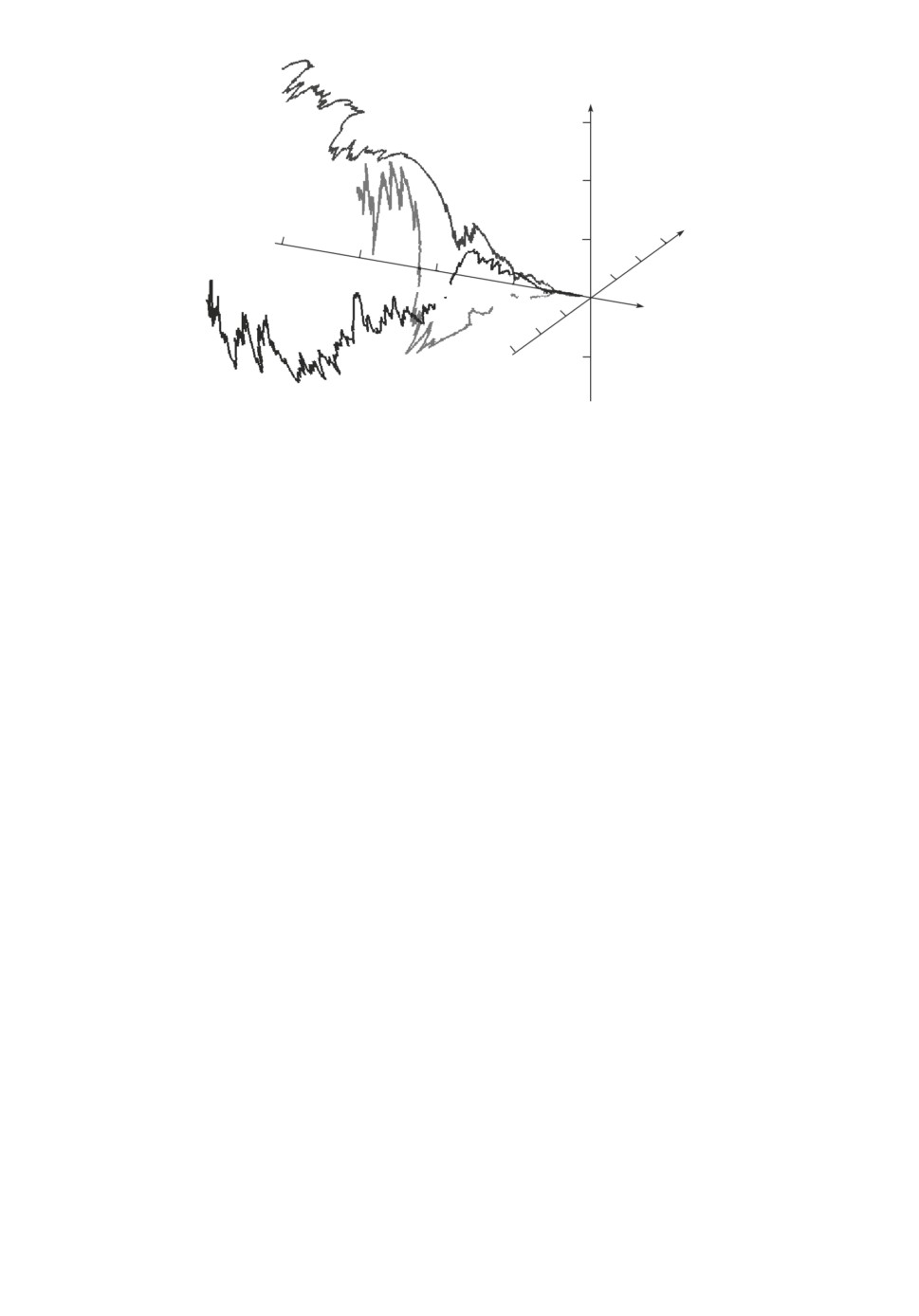
Рис. 4. Результаты моделирования трех реализаций случайного процесса для
различных начальных точек в примере 4.6 - пространственная картина пове-
дения переменных состояния x1(t), x2(t) во времени.
Предположим, что на предложенную механическую систему действует
случайное возмущение в виде винеровского процесса, так что система (40)
с учетом возмущения имеет вид системы уравнений Ито:
dx1 = (x2 + v1)dt + bx2dw,
(41)
dx2 = (-x1 + v2)dt + ux1dw.
Здесь для удобства использования теории переменная τ заменена на t. Пе-
ременная u = u(t) дополнительное управление, позволяющее изменять ха-
рактер действующих возмущений, а b = 0 - постоянная величина.
Если управление u(t) взять в виде
(42)
u(t) = -b,
то система (41) представляет собой частный случай системы (37) и управ-
ления (38), (42) обеспечивают абсолютную инвариантность системы (41) по
критерию (27). Физически это означает, что управления (38), (42) гасят ко-
лебания маятника в терминальный момент времени t1 = 0.
На рис. 2, 3 показаны результаты моделирования реализаций случайно-
го процесса x(t) = (x1(t), x2(t))T, t ∈ [-2, 0] для трех различных начальных
точек x0 = x(-2) = (6, 0), x0 = x(-2) = (0, 6), x0 = x(-2) = (-6, 0) (по одной
реализации для каждой точки), демонстрирующие абсолютную инвариант-
ность величин x1(0), x2(0). Величина A была выбрана равной 4. На рис. 4
показано поведение маятника в пространстве координат и времени.
Моделирование проводилось в системе MAPLE. Численное интегрирова-
ние системы уравнений Ито выполнялось классическим методом Эйлера [7].
Интервал интегрирования [-2, 0] разбивался на 500 шагов. Величины x1(0),
x2(0) на всех трех реализациях равны нулю с точностью до пятого знака
134
после запятой. Их малое отличие от нуля обусловлено ошибкой численного
счета реализаций случайного процесса. Численный расчет реализаций имеет
чисто демонстрационный характер.
7. Заключение
Условия терминальной инвариантности работ [3, 4] конкретизированы для
квазилинейных стохастических систем диффузионного типа, нелинейных по
управлению, и приобрели достаточно конструктивный вид.
В настоящее время достаточно интенсивно развивается и используется в
приложениях теория робастности ограниченности действия возмущений.
На этом фоне возможность добиться полной компенсации возмущений (ин-
вариантности) выглядит весьма привлекательно.
Следует отметить, что, несмотря на трудности синтеза систем, обладаю-
щих свойством терминальной инвариантности (по возмущениям или абсо-
лютной), эта задача намного “мягче” аналогичной задачи классической тео-
рии инвариантности, когда нужно синтезировать систему, в которой при за-
данном начальном условии (t0, x0) изменение во времени заданной функ-
ции α(t, x) не зависит от возмущений. В стохастическом варианте в случае,
когда с вероятностью единица α(t, x(t)) = const, такая функция по аналогии
с детерминированными системами называется первым интегралом стохасти-
ческой системы [8].
“Мягкость” задачи терминальной инвариантности состоит в том, что в
ней первый интеграл α(t, x) = ϕ(t, x) не задается априори, а выбирается в
процессе решения задачи, в результате ее решение зачастую не единствен-
но. Используя это, часто можно выполнить дополнительные требования к
алгоритму управления. Например, в случае, когда система имеет вид (2) и
ищется линейная стратегия управления (3), можно потребовать, чтобы стра-
тегия управления не зависела от некоторых компонент вектора состояния x
не доступных измерению (пример 2 в разделе 6).
Абсолютная терминальная инвариантность не имеет аналогов в классиче-
ской теории инвариантности.
СПИСОК ЛИТЕРАТУРЫ
1. Розоноэр Л.И. Вариационный подход к проблеме инвариантности // АиТ. 1963.
№ 6. С. 744-756; № 7. С. 17-22.
Rozonoer L.I. A Variational Approach to the Problem of Invariance of Automation
Control Systems // Autom. Remote Control. 1963. V. 24. No. 6. P. 680-743; No. 7.
P. 793-800.
2. Хрусталев М.М. Необходимые и достаточные условия слабой инвариантно-
сти // АиТ. 1968. № 4. С. 17-22.
Khrustalev M.M. Necessary and Sufficient Conditions of Invariance // Autom. Re-
mote Control. 1968. V. 29. No. 4. P. 540-544.
3. Хрусталев М.М. Инвариантность стохастических систем диффузионного ти-
па // ДАН. 2017. Т. 476. № 2. С. 148-150.
Khrustalev M.M. Invariance of Stochastic Diffusion Systems // Dokl. Math. 2017.
V. 96. No. 2. P. 535-537.
135
4. Хрусталев М.М. Терминальная инвариантность стохастических систем диффу-
зионного типа // АиТ. 2018. № 8. С. 81-100.
Khrustalev M.M. Terminal Invariance of Stochastic Diffusion Systems // Autom.
Remote Control. 2018. Vol. 79. No. 8. С. 1434-1449.
5. Хрусталев М.М. Терминальная инвариантность линейных стохастических си-
стем диффузионного типа // Труды 13-го Всероссийского совещания по пробле-
мам управления (ВСПУ XIII, Москва, 2019). М.: ИПУ РАН, 2019. С. 1305-1309.
6. Королюк В.С., Портенко Н.И., Скороход А.В., Турбин А.Ф. Справочник по тео-
рии вероятностей и математической статистике. М.: Наука, 1985.
7. Мильштейн Г.Н. Численное интегрирование стохастических дифференциаль-
ных уравнений. Свердловск: Изд-во Урал. ун-та, 1988.
8. Карачанская Е.В. Построение множества дифференциальных уравнений с за-
данным набором первых интегралов // Вестн. ТОГУ. 2011. № 3 (22). С. 47-56.
Статья представлена к публикации членом редколлегии Е.Я.Рубиновичем.
Поступила в редакцию 28.02.2020
После доработки 11.05.2020
Принята к публикации 25.05.2020
136