Автоматика и телемеханика, № 10, 2020
Управление в технических системах
© 2020 г. В.Б. ТРОФИМОВ, канд. техн. наук (trofimov_vbt@mail.ru),
(Национальный исследовательский технологический университет ¾МИСиС¿,
Москва)
О ПОДХОДЕ К ИНТЕЛЛЕКТУАЛЬНОМУ УПРАВЛЕНИЮ
СЛОЖНЫМИ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
НА ПРИМЕРЕ ЧЕРНОЙ МЕТАЛЛУРГИИ
Предлагается оригинальный подход к синтезу интеллектуальных си-
стем управления сложными нестационарными объектами, в которых про-
исходит многократное воспроизведение производственных процессов за
определенный отрезок времени, что позволяет накопить данные и зна-
ния о программах управления, условиях и результатах их реализации,
о траекториях изменения контролируемых переменных. Рассматривается
декомпозиция движения объекта управления на возмущенное и невозму-
щенное движение, для отображения невозмущенного программного дви-
жения объекта предлагается использовать экспертные системы и концеп-
цию рассуждения по прецедентам, а для возмущенного движения ис-
кусственные нейронные сети.
Ключевые слова: управление, прецедент, экспертные системы, искус-
ственные нейронные сети, распознавание.
DOI: 10.31857/S0005231020100050
1. Введение
В автоматизированных системах управления сложными технологически-
ми объектами целесообразно использовать прогнозирующие модели на основе
искусственных нейронных сетей, экспертных систем и концепции рассужде-
ния (обучения) по прецедентам [1-4]. Методы искусственного интеллекта ис-
пользуются как способ борьбы с неопределенностью внешней среды и неста-
ционарностью объекта управления.
Переход к современным интеллектуальным производственным технологи-
ям, создание систем обработки больших объемов данных, машинного обуче-
ния и искусственного интеллекта является актуальным направлением Стра-
тегии научно-технологического развития Российской Федерации.
Большинство технологических объектов, особенно в черной металлургии,
характеризуется нестационарностью, которая проявляется в изменении их
параметров. Причина заключается в том, что они изнашиваются в процес-
се эксплуатации (¾стареют¿ элементы объектов), происходит изменение их
конструктивных характеристик (модернизация, ремонт, замена, т.е. влия-
ние внутренней структуры), изменение контролируемых и неконтролируемых
137
возмущений (например, изменение химического состава и качества перера-
батываемого сырья, т.е. влияние внешней среды), существенное изменение
технологического регламента производственных процессов на различных эта-
пах (влияние внутренних условий). Управление объектами, функционирова-
ние которых организовано циклически, предполагает повторение, с некото-
рой точностью, определенного набора действий для достижения желаемого
результата по окончании каждого цикла работы. Многократное воспроизве-
дение циклов за определенный отрезок времени позволяет накопить данные
и знания о программах управления, условиях и результатах их реализации,
о траекториях изменения контролируемых переменных. Прецеденты предла-
гается использовать для формирования эффективных программ управления
предстоящим циклом работы объекта в условиях изменения динамических
характеристик возмущающих воздействий, свойств каналов управления и за-
дающих воздействий. Циклы работы объекта различаются целями управле-
ния, требуемыми характеристиками выпускаемого продукта, изменяющими-
ся свойствами объекта, способами принятия управленческих решений разны-
ми операторами-технологами, свойствами внешних воздействий.
Актуальным направлением развития систем искусственного интеллекта
является создание методов правдоподобных рассуждений на основе преце-
дентов (Case-Based Reasoning (CBR) концепция обучения по примерам или
концепция рассуждения по прецедентам) [1-4]. Повторное использование пре-
цедентов позволяет уменьшить время, затрачиваемое на решение новой зада-
чи, повысить качество управления, объяснить полученное решение путем де-
монстрации успешного прецедента с отражением показателей сходства, обу-
чаться в процессе работы, избежать повторения ошибки [1, 2]. Использование
прецедентов позволяет принимать управленческие решения, учитывающие
множество реальных ограничений, в том числе по времени и эффективно-
сти [4].
Для отображения программного движения объекта управления предла-
гается использовать экспертные системы на основе CBR-концепции с вы-
делением типовых технологических ситуаций (траекторий), их признаков, а
для отображения возмущенного движения искусственные нейронные сети.
В экспертных системах представление знаний о программном движении осу-
ществляется в явном виде с помощью продукционных правил (в библиотеке
прецедентов на основе текущей информации в режиме реального време-
ни), а в нейронных сетях представление знаний о возмущенном движении
осуществляется в неявном виде в архитектуре сети, параметрах нейронов
и связей.
Большое количество входных элементов нейронной сети позволяет учи-
тывать внешние воздействия, которые обуславливают нестационарность объ-
екта управления. Сеть эффективно отображает поведение сложного объекта
управления в малом диапазоне изменений входных и выходных величин, по-
скольку может воспроизводить сложные нелинейные зависимости, обучаться
на примерах и ¾узнавать¿ в потоке зашумленной и противоречивой инфор-
мации черты ранее встреченных ситуаций. Использование экспертных систем
с несколькими библиотеками прецедентов позволяет существенно повысить
гибкость управления.
138
Актуальной задачей модификации CBR-цикла, основанного на опыте про-
шлых подобных ситуаций, является разработка процедур прогнозирования
возможных последствий от применения прецедентного решения. Прогнози-
рование необходимо в связи с тем, что последствия реализованных управ-
ляющих воздействий сказываются на состояниях и выходных воздействиях
сложных технологических объектов длительное время, технологические цик-
лы (ситуации) в черной металлургии часто не являются точным повторением
ранее реализованных циклов.
2. Прецедентный подход к интеллектуальному управлению
Предлагаемый подход основан на концепции возмущенного-невозмущен-
ного (программного) движения, которая была разработана А.М. Ляпуновым
и развита Н.Н. Красовским, А.М. Летовым для решения задач устойчиво-
сти [5]. Программное управляющее воздействие, поступая на технологиче-
ский объект управления совместно с параметрическими и координатными
возмущениями, вызывает ¾движение¿ объекта, координаты которого отлича-
ются от координат невозмущенного движения на значение координат возму-
щенного движения, которые затем поступают в регулятор. Даже при точном
исполнении программы действительное движение объекта будет отличать-
ся от программного движения. Под невозмущенным движением будем по-
нимать ¾нормальный¿ (¾программный¿, ¾номинальный¿, ¾базовый¿, ¾опор-
ный¿, ¾нормативный¿, ¾штатный¿) режим работы объекта, соответствующий
требованиям технологической инструкции, а под возмущенным движением
отклонение от ¾нормального¿ режима. Необходимость создания интеллекту-
альных систем управления, способных функционировать в условиях развития
¾расстройства¿ объекта управления, обуславливается тем, что именно этот
период работы объекта характеризуется максимальными затратами матери-
альных и временных ресурсов на ликвидацию этих ¾расстройств¿ (аварий-
ных ситуаций), значительными потерями производства и снижением качества
продукции. Подход основан на многолетней практике восстановительно-про-
гнозирующего управления металлургическими объектами АО ¾ЕВРАЗ Объ-
единенного Западно-Сибирского металлургического комбината¿.
Информационная модель (структурированное представление накопленно-
го опыта в виде данных и знаний) каждого прецедента включает описание
проблемной ситуации (информативные признаки прецедента для его иденти-
фикации, описание условий, когда целесообразно его использовать), совокуп-
ности действий (управленческих решений, программ управления), принимае-
мых для устранения данной проблемной ситуации, и результата применения
решения (оценка его эффективности).
Предлагаемый подход включает:
многоструктурное распознавание ситуации в системе управления на
основе текущей входной информации, поступающей из подсистемы оцени-
вания, т.е. обнаружение типовых образов-знаний (признаков), отражающих
неслучайные причинно-следственные связи событий в системе, которые мож-
но использовать для управления, и запоминать их в базе знаний (распознава-
ние осуществляется на основе коллективного принятия решений множеством
классификаторов);
139
извлечение из базы знаний прецедента или подмножества прецедентов,
соответствующих текущей ситуации, и их ранжирование по коэффициенту
уверенности (или по мере доверия), а также по зафиксированной ранее эф-
фективности (например, минимальное время исполнения программы, надеж-
ность), т.е. отбор прецедентов из множества прошлых циклов (ситуаций) по
отношению к предстоящему циклу может осуществляться исходя из совпаде-
ния целей и ограничений, близости (подобия) параметров качества получае-
мой продукции, близости продолжительности свершившегося и предстоящего
циклов, близости начальных условий, а также из наименьших затрат [6];
многовариантное прогнозирование возможных последствий от прини-
маемого решения, содержащегося в извлеченном прецеденте-победителе;
повторное использование извлеченного прецедента-победителя (преце-
дентов) для принятия очередного решения (т.е. повторное применение тра-
екторий программных управляющих воздействий, программных выходных
воздействий, базовых уровней контролируемых внешних воздействий на за-
данном интервале времени);
пересмотр (¾автоматическая коррекция¿, ¾адаптация¿, ¾преобразова-
ние¿) прецедентного решения в соответствии с поставленной задачей путем
установления отличия между новым и ¾извлеченным¿ прецедентами с учетом
цели управления на основе применения экспертной системы, использующей
обобщенные знания из базы правил для решения текущей задачи;
пополнение или корректировка библиотеки прецедентов (¾обучение си-
стемы¿ или ¾пополнение знаний¿), т.е. сохранение вновь принятого решения
как части нового прецедента для будущих аналогичных ситуаций или до-
бавление скорректированного прецедента в базу знаний в случае успешного
решения задачи, а также удаление или архивирование прецедентов, потеряв-
ших актуальность.
Таким образом, чем дольше функционирует система, тем разнообразнее у
нее база знаний и тем эффективнее будут принимаемые решения.
Предпосылки предлагаемого подхода: 1) подобные задачи должны иметь
подобные решения; 2) производственные задачи должны повторяться, т.е.
для многих предстоящих проблем должен существовать аналог в базе зна-
ний; 3) имеется возможность приобретения и представления знаний о типо-
вых ситуациях из работы объекта управления; 4) предметная область являет-
ся слабоструктурированной, а задачи плохо математически формализуемые;
5) наличие достаточно большого числа примеров эффективных управленче-
ских решений, найденных оператором-технологом для различных типопред-
ставительных ситуаций, а также наличие большого объема данных о внешних
влияющих факторах.
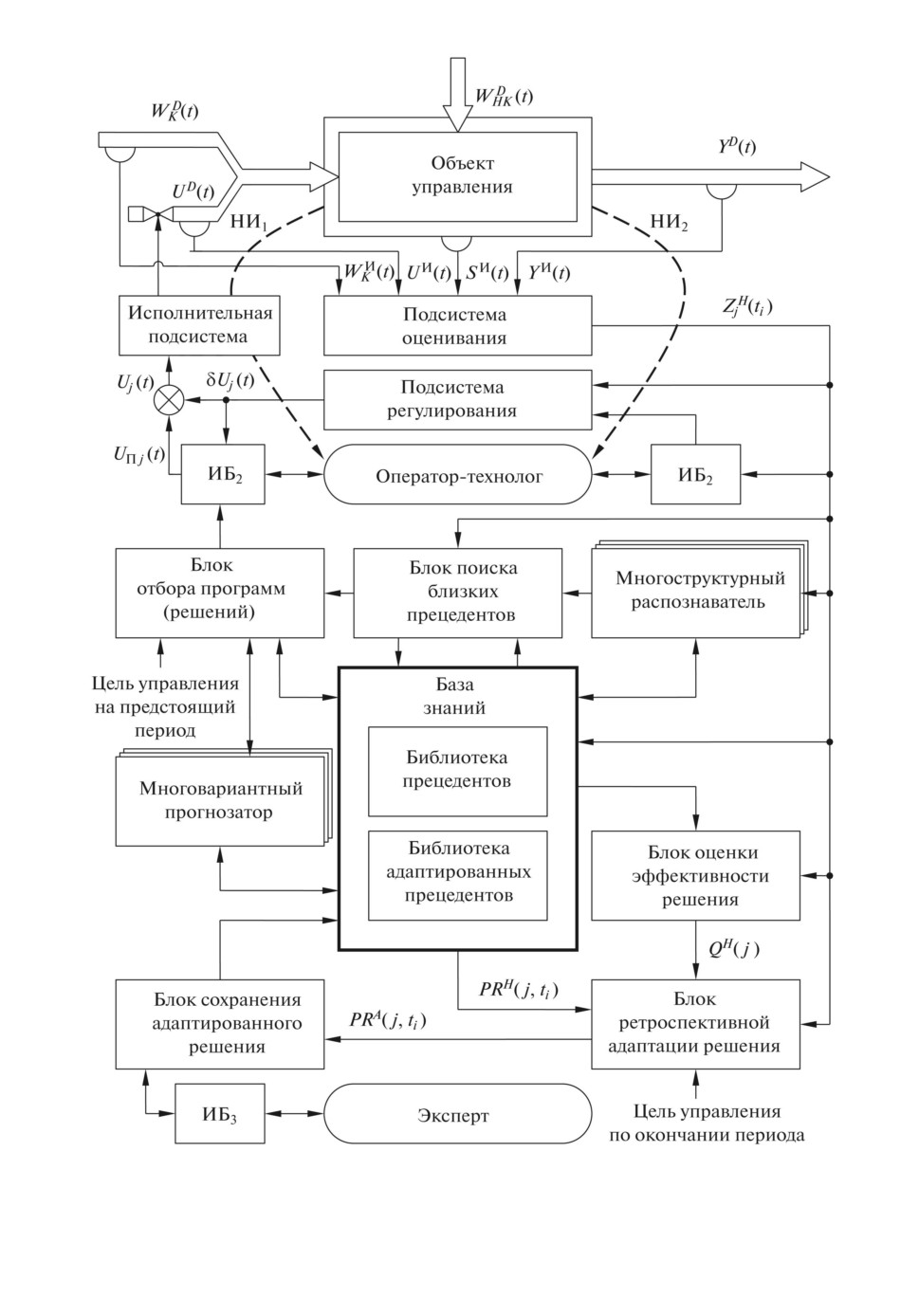
На рис. 1 представлена схема интеллектуальной системы управления, ко-
торая реализует данный подход. На этом рисунке приняты следующие обо-
значения: YD(t) действительные (индекс D) выходные воздействия объ-
екта управления на внешнюю среду в момент времени t; UD(t) - управляю-
щие воздействия; WDK(t) - контролируемые (индекс K ) внешние воздействия;
WDHK(t) неконтролируемые (индекс HK) внешние воздействия; ZHj(ti) =
= {Y Hj (ti), SHj (ti), WHKj(ti), UHj (ti)} вектор натурных (индекс Н ) сигналов,
140
Рис. 1. Схема интеллектуальной системы управления на основе CBR-концепции.
141
относящихся к j -му технологическому циклу (ситуации, событию) и дискрет-
ному моменту времени ti; YHj (ti) = Ψy(YИ(t)) вектор натурных дискрет-
ных данных, полученных из измерительных (индекс И) сигналов о выходных
воздействиях объекта YИ(t); UHj (ti) = Ψu(UИ(t))
вектор натурных дис-
кретных данных, полученных из измерительных сигналов об управляющих
воздействиях UИ(t); WHKj(ti) = Ψw(WИK(t)) вектор натурных дискретных
данных, полученных из измерительных сигналов о контролируемых внеш-
них воздействиях WИK(t); SHj (ti) = Ψs(SИ(t)) вектор натурных дискретных
данных, полученных из измерительных сигналов о состоянии объекта SИ(t);
Ψy(·), Ψu(·), Ψw(·), Ψs(·) процедуры оценивания (фильтрации); НИ неин-
струментальная информация; ИБ интерфейсный блок.
В системе осуществляются следующие операции.
1. Сбор данных о прошедшем процессе (цикле процесса), проверка их на
достоверность, контроль и оценивание ZHj (ti), расчет критериев эффектив-
ности управления QHm(Tj ) = Fm{ZHj (ti), ti ∈ [0, Tj ]}, m = 1, . . . , M по ходу и
по окончанию j -го временного отрезка [0, Tj ]. В качестве основного показа-
теля эффективности можно использовать, например, себестоимость продук-
ции, полученной в j -м технологическом цикле, или затраты на ликвидацию
j -й аварийной (нештатной) ситуации.
2. Сохранение траекторий вектора ZHj (·), компоненты которого имеют вид:
[
]
YHj(ti) =
yH1(ti),... ,yHn(ti),... ,yHN(ti)
;
j
[
]
SHj(ti) =
sH1(ti),... ,sHℓ(ti),... ,sHL(ti)
;
j
[
]
WHKj(ti) =
wHK1(ti),... ,wHKr(ti),... ,wHKR(ti)
;
j
[
]
UHj(ti) =
uH1(ti),... ,uHp(ti),... ,uP (ti)
j
Натурные сигналы ZHj (ti), натурное программное управляющее воздей-
ствие UHΠj(ti), задающее воздействие Y∗j(ti), значения критериев эффектив-
ность управления QHm(Tj ), распознанное состояние объекта (его класс
Sj(ti),
составляющие прецедент P RH (j, ti) = {ZHj (ti), UΠj (ti), Y∗j(ti), QHm(Tj )
Sj(ti)},
сохраняются в библиотеке прецедентов.
3. Оценивание экспертом (оператором-технологом) полученных прецеден-
тов, установление им меры доверия от 0 до 1. Мера доверия равная 1 означа-
ет то, что эксперт считает данный прецедент полностью достоверным, а 0 -
абсолютно недостоверным. Также эксперт выявляет наиболее эффективные
прецеденты по их результатам с учетом состояния объекта управления.
4. Оценивание характеристик каналов управления, определение времени
запаздывания, времени инерции и коэффициентов передачи по этим каналам
путем нанесения тестовых воздействий.
5. Если прецедент обеспечил точное совпадение измеренных и заданных
выходных величин, то он сохраняется в библиотеке прецедентов, в противном
случае осуществляется его ретроспективная адаптация (пересмотр, пересчет)
по окончании j-го технологического цикла (ситуации). Пересмотр осуществ-
142
ляется путем использования обратной нейросетевой пересчетной модели объ-
екта управления. В качестве типа сети был выбран стандартный многослой-
ный персептрон, в промежуточных и выходном слоях которого использованы
нейроны сигмоидального типа с униполярной функцией активации.
Корректировка программного управляющего воздействия осуществляется
следующим образом:
(
)
UAΠj(ti) = UHΠj(ti) + Fинс Y∗j(ti) - YHj(ti) ,
где Fинс(·) нейросетевой оператор.
Оператор Fинс(·) описывается следующими формулами:
xc(i) - xminc
xнc(i) =
;
xmaxc - xminc
∑
vнp(i) = 1 + exp -
w(3)
1+
pm
m=0
[
(
)]-1
-1-1
∑
∑
(1)
+ exp- w(2)
1 + exp
- wk
xнc(i)
;
mk
c
k=0
c=0
[
]
vp(i) = vminp +
vmaxp - vminp
vнp(i),
где xc(i) отклонение натурного выходного воздействия от заданного (вход
сети); vp(i)
корректирующее значения p-й программы управления (выход
сети), p = 1, . . . , P (выходной нейрон, у которого p = 1, отвечает за корректи-
ровку программного управления по первому каналу управления и т.д.); xнc(i)
и vнp(i) нормированные значения xc(i) и vc(i); xmaxc, xminc и vmaxp, vminp мак-
симальное и минимальное значения xc(i) и vp(i), взятые из обучающей выбор-
ки; w(1)kc, w(2)mk, wpm) весовые коэффициенты, оптимальные значения которых
определяются в процессе обучения сети по алгоритму обратного распростра-
нения ошибки, например, на основе высокоуровневого языка программиро-
вания Python.
То есть происходит пересмотр управлений программного вида путем
ретроспективной корректировки реализованных программных управлений
(траекторий управления) по контролируемым данным об отклонениях вы-
ходных параметров по ходу процесса и в конце его от желаемого режима.
Определяются те программные управляющие воздействия, которые следова-
ло бы нанести на объект для того, чтобы обеспечить точное попадание выход-
ных результатов процесса в их заданные значения. Это позволяет уменьшить
влияние допущенных ошибок на последующие результаты ведения техноло-
гического процесса. Пересмотренные программы управления сохраняются в
библиотеке адаптированных прецедентов, которые целесообразно использо-
вать на предстоящих технологических циклах P RA(j, ti). Эксперт принимает
143
решение о включении нового прецедента в базу знаний для его последующего
применения.
6. Формирование множества актуальных прецедентов для предстояще-
го (j + 1)-го периода работы объекта осуществляется по критерию макси-
мальной близости (схожести) заданных значений целевых переменных пред-
стоящего (j + 1)-го цикла к соответствующим параметрам прецедента. Для
оценивания степени близости целесообразно использовать евклидову метри-
ку, квадрат евклидового расстояния, манхэттенскую метрику, меру сходства
Хемминга, вероятностную меру сходства, меру сходства Роджерса-Танимото,
расстояние Чебышева, меру близости Журавлева, метрику Махалонобиса,
Брея-Кертиса, Жаккара, Чекановского [2]. При отборе учитываются возмож-
ные последствия от принимаемых решений, также текущие ограничения на
управляющие воздействия, т.е. осуществляется проверка предлагаемых ре-
шений на реализуемость. Если рекомендация не прошла проверку, то можно
взять результаты предыдущего цикла процесса, использовать базовые (сред-
ние) значения контролируемых переменных, либо взять данные типопредста-
вительного процесса, которые хранятся в базе знаний и периодически обнов-
ляются.
7. Многовариантное прогнозирование выходных воздействий объекта пу-
тем многократного ¾проигрывания¿ различных вариантов управляющих воз-
действий в ускоренном времени по следующей формуле:
{
}
YM (θ | θ + TΠ/χ)
= Φ1(UΠ(θ | θ + TΠ/χ),WБK(θ | θ + TΠ/χ)) +
({
}
)
+Φ2
U (θ | θ + TΠ/χ)
,δ ŴK(θ | θ + TΠ/χ)
+
Y (θ | θ + TΠ/χ);
{
}
{
}
Û (θ | θ + TΠ/χ)
=UΠ(θ | θ + TΠ/χ) +
U (θ | θ + TΠ/χ)
;
ŴK(θ | θ + TΠ/χ) = WБK(θ | θ + TΠ/χ) + δŴK(θ | θ + TΠ/χ),
где Φ1(·)
продукционная модель соответствия программных управляю-
щих воздействий UΠ(·) и базовых уровней контролируемых внешний воздей-
ствий WБK(·) программной составляющей выходного воздействия, накапли-
ваемых и модифицируемых в базе знаний; Φ2(·) нейросетевая модель влия-
ния отклонений от программных и базовых уровней входных воздействий
на изменение выходного воздействия; {
U (θ | θ + TΠ/χ)} возможные ва-
рианты корректирующих воздействий; UΠ(θ | θ + TΠ/χ), WБK(θ | θ + TΠ/χ)
программные управления и базовые уровни контролируемых внешних воз-
действий, считываемые из базы знаний на интервале прогнозирования TΠ;
δ ŴK(θ| θ + TΠ/χ) прогноз отклонений от базовых уровней контролируе-
мых внешний воздействий в ускоренном режиме времени;
Y (θ | θ + TΠ/χ)
прогнозируемые в ускоренном времени косвенные оценки эффектов некон-
тролируемых внешних воздействий;
YM (θ | θ + TΠ/χ)} прогнозные оцен-
ки выходных воздействий объекта управления, полученные в ускоренном
времени при различных вариантах возможных управляющих воздействий;
θ = t/χ ускоренное время; t реальное время; χ≫1 коэффициент уско-
рения времени.
144
8. Выбор оператором-технологом на предстоящий период T (j + 1) тако-
го прецедента, содержащего ретроспективно-оптимальную программу, ко-
торый соответствует его предпочтениям и требованиям технологической
инструкции.
9. Корректировка выбранной программы-прецедента P R∗(j + 1, ti) при на-
личии существенных отклонений параметров возмущений WИK(j + 1, ti) от со-
ответствующих параметров WHK (j + 1, ti) выбранной программы. При этом
используется аналогичная нейросетевая модель, учитывающая влияние кон-
тролируемых возмущающих воздействий.
3. Применение прецедентного похода в управлении
CBR-системы разрабатывают на платформах CBR-Works, CAT-CBR,
myCBR. Предлагаемый подход целесообразно использовать для управления
доменной печью, агломерационной машиной, сталеплавильным конвертером,
они характеризуются большими объемами натурных данных [7].
Сталеплавильный процесс в конвертерах принадлежит к классу сложных
периодических производственных процессов, количество плавок (прецеден-
Таблица 1. Хронометраж плавки (описание решения проблемы)
Время, Длительность
Наименование операции
ч:мин операции, мин:с
09:55
присадка в конвертер: известь (1,61 т), ФМ-1 (0,40 т)
09:59
02:28
завалка лома
присадка в конвертер: известь (1,53 т),
10:01
флюс ФОМИ (1 т)
нагрев лома: расход кислорода 1552 м3,
10:02
06:04
положение фурмы до зеркала металла 3,54 м
10:03
присадка в конвертер: уголь ТОМО1 (2,44 т)
присадка в конвертер: известь (0,49 т),
10:06
уголь ТОМО1 (0,58 т)
10:11
02:18
заливка чугуна
10:13
19:13
продувка: расход кислорода 7664 м3
10:32
10:01
повалка
10:42
05:07
выпуск металла
10:48
01:36
прерывание выпуска
10:49
00:16
слив шлака
10:49
47:03
цикл плавки
Таблица 2. Результаты экспресс-анализа стали (в 10:44, описание результата)
Al, %
C, %
Mn, %
S, %
P, %
Cr, %
Ni, %
Cu, %
0,38
0,04
0,09
0,033
0,012
0,03
0,03
0,04
Полученная марка стали СТ3ПС.4/ЭТ (ГОСТ 380-2005)
Температура стали 1621◦С (в 10:38)
145
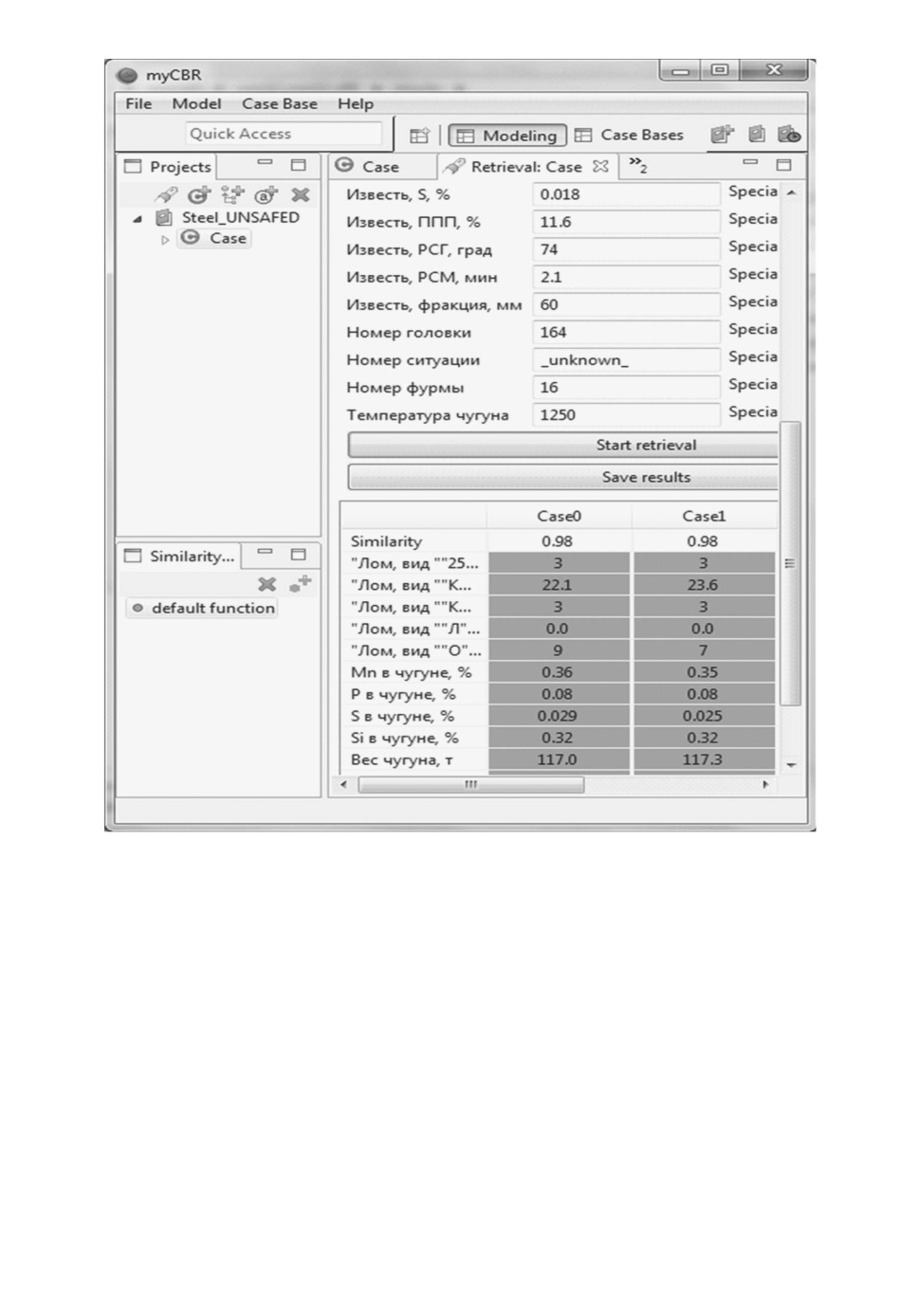
Рис. 2. Экранная форма CBR-системы для управления конвертером.
тов) в год достигает несколько тысяч. Каждая плавка состоит из периодов:
завалка и нагрев лома; заливка чугуна; продувка кислородом; повалка (на-
клонение конвертера и взятие пробы); выпуск металла и шлака. Состав и
масса исходных материалов плавки являются разовыми управляющими воз-
действиями, добавки сыпучих материалов периодическими, а расход кисло-
рода (интенсивность дутья) и изменение положения фурмы непрерывным
управлением. В этом случае прецедент включает:
описание проблемной ситуации (¾химический состав чугуна, его тем-
пература и вес, вид лома и его вес, номер и состояние фурмы, футеровки,
заданная марка стали, вид ферромарганца, флюса, тип угля, химический со-
став извести¿, ¾сворачивание шлака¿, ¾выбросы¿, ¾переливы шлака¿);
146
описание совокупности управляющих воздействий (расход кислорода и
его программная траектория, положение фурмы и ее программная траекто-
рия, время начала и окончания плавки, количество чугуна, залитого в кон-
вертер, количество лома, извести, ферромарганца, флюса, угля, поданного в
конвертер, длительность нагрева лома, табл. 1);
описание результата применения решения (химический состав получен-
ной стали, ее температура, параметры отходящих технологических газов, по-
лученная марка стали, табл. 2).
Применение CBR-системы способствует получению заданной марки стали,
уменьшению дисперсии температуры металла.
На рис. 2 представлена экранная форма CBR-системы, созданная на от-
крытой платформе myCBR. Система обеспечивает стабильность работы кон-
вертера.
4. Заключение
Эффективность предлагаемого подхода зависит от количества высокока-
чественных и актуальных прецедентов, т.е. прецедентов соответствующих те-
кущему состоянию объекта, внешним воздействиям и цели управления, от
размера базы знаний. При значительном разнообразии заданий на выпуск
продукции (в современном сталеплавильном конвертерном цехе может вы-
плавляться более 400 марок стали), а также при большом множестве ситуаций
по внешним воздействиям и ошибкам измерений отобрать хотя бы несколько
безупречных прецедентов на каждый вид продукции весьма сложно. Поэто-
му целесообразно по окончании каждого технологического цикла не отбра-
сывать ошибочные решения, а корректировать их, решая задачу пересмотра
и расширения базы знаний с учетом доверия к этому новому прецеденту.
Предлагаемый подход отличается от других подходов, основанных на на-
коплении опыта управления, использованием разнообразных данных и зна-
ний (количественных и качественных признаков) о работе действующей си-
стемы управления в режиме реального времени, оперативным сохранением
в базе знаний не только лучших практик управления технологическим объ-
ектом, но и адаптированных решений, существенным разнообразием преце-
дентов в базе знаний, использованием информационных моделей прецеден-
тов, применением многовариантного прогнозирования последствий от пре-
цедентных решений, а также совместным использованием искусственных
нейронных сетей и экспертных систем на основе концепции возмущенного-
невозмущенного движения для технологического объекта.
СПИСОК ЛИТЕРАТУРЫ
1. Cox M.T., Funk P., Begum S. Case-Based Reasoning Research and Development.
Stockholm: Springer, 2018.
2. Варшавский П.Р., Еремеев А.П. Моделирование рассуждений на основе преце-
дентов в интеллектуальных системах поддержки принятия решений // Искус-
ственный интеллект и принятие решений. 2009. № 1. С. 45-57.
147
3. Vassilyev S.N., Novikov D.A., Bakhtadze N.N. Intelligent Control of Industrial Pro-
cesses // 7th IFAC Conference on Manufacturing Modelling, Management, and Con-
trol, 2013. P. 49-57.
4. Соколов И.А. Теория и практика применения методов искусственного интеллек-
та // Вестн. РАН. 2019. Т. 89. № 4. С. 365-370.
5. Воротников В.И. Задачи и методы исследования устойчивости и стабилизации
движения по отношению к части переменных: направления исследований, ре-
зультаты, особенности // АиТ. 1993. № 3. С. 3-62.
Vorotnikov V.I. Stability and Stabilization оf Motion: Research Approaches, Re-
sults, Distinctive Characteristics // Autom. Remote Control. 1993. V. 54. No. 3.
P. 339-397.
6. Aamodt A., Plaza E. Case-Based Reasoning: Foundational Issues, Methodological
Variations, and System Approaches // AI Communications. IOS Press. 1994. V. 7.
No. 1. P. 39-59.
7. Kulakov S.M., Trofimov V.B., Dobrynin A.S., Taraborina E.N. Precedent Approach
to the Formation of Programs for Cyclic Objects Control // IOP Conference Series:
Materials Science and Engineering. IOP Publishing, 2018. V. 354. P. 1-9.
Статья представлена к публикации членом редколлегии Н.Н.Бахтадзе.
Поступила в редакцию 02.03.2020
После доработки 01.06.2020
Принята к публикации 09.07.2020
148