Автоматика и телемеханика, № 11, 2020
© 2020 г. А.В. БОРИСОВ, д-р физ.-мат. наук (ABorisov@frccsc.ru)
(Институт проблем информатики ФИЦ ИУ РАН, Москва;
Московский авиационный институт;
Центр фундаментальной и прикладной математики МГУ)
L1-ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ МАРКОВСКИХ
СКАЧКООБРАЗНЫХ ПРОЦЕССОВ I: ТОЧНОЕ РЕШЕНИЕ
И ЧИСЛЕННЫЕ СХЕМЫ РЕАЛИЗАЦИИ1
Первая часть статьи посвящена разработке класса алгоритмов числен-
ного решения задачи фильтрации состояний марковских скачкообразных
процессов по косвенным непрерывным наблюдениям в присутствии ви-
неровских шумов. В качестве критерия оптимальности выступает сред-
няя L1-норма ошибки оценки. Интенсивность шумов в наблюдениях мо-
жет зависеть от оцениваемого состояния. Алгоритмы численного реше-
ния используют не исходные непрерывные, а дискретизованные по време-
ни наблюдения. Особенностью предлагаемых алгоритмов является учет
вероятности появления нескольких скачков оцениваемого состояния на
интервале дискретизации наблюдений. Основным результатом являют-
ся утверждения о точности приближенного решения задачи фильтрации
в зависимости от числа учитываемых скачков оцениваемого состояния,
размера шага дискретизации по времени и применяемой схемы числен-
ного интегрирования. Они служат теоретической основой последующего
анализа конкретных численных схем реализации решения задачи филь-
трации.
Ключевые слова: марковский скачкообразный процесс, устойчивый алго-
ритм численного решения, локальная и глобальная точность аппрокси-
мации.
DOI: 10.31857/S0005231020110021
1. Введение
Фильтр Вонэма [1] является одной из наиболее распространенных проце-
дур обработки сигналов, используемых в технике, телекоммуникациях, эко-
номике и финансах, биологии, медицине и в других областях [2-5]. Уравне-
ния данного фильтра описывают решение задачи оптимального оценивания
состояний марковского скачкообразного процесса (МСП) по его косвенным
наблюдениям в присутствии аддитивных винеровских шумов. Оценки филь-
трации представляют собой условное распределение состояния МСП относи-
тельно имеющихся наблюдений, обладающее очевидными свойствами поком-
понентной неотрицательности и нормировки. Несмотря на элегантный вид
1 Работа выполнена при частичной поддержке Российского фонда фундаментальных
исследований, проект № 19-07-00187 А.
11
уравнений фильтра, его численная реализация сталкивается со значитель-
ными проблемами. Например, явные численные методы решения систем сто-
хастических дифференциальных уравнений, основанные на разложении Ито-
Тейлора [6], примененные к системе уравнений фильтра Вонэма, проявляют
свойства неустойчивости и ¾разваливаются¿: вычисленные с его помощью
аппроксимации перестают удовлетворять условиям неотрицательности и нор-
мировки и со временем достигают произвольно больших по модулю значений.
Далее в статье будем называть устойчивыми алгоритмы численного реше-
ния уравнений фильтра Вонэма, сохраняющие свойства неотрицательности и
нормировки для получаемых оценок, которые также будем называть устой-
чивыми. Для оценок - приближений условного распределения МСП сохране-
ние введенного выше определения устойчивости представляется ключевым,
так как этим свойством обладает и само приближаемое условное распреде-
ление. В данной работе термин ¾устойчивость¿ не используется как сино-
ним слова ¾робастность¿, но близок по смыслу к устойчивости численных
алгоритмов решения нелинейных дифференциальных уравнений [7, 8] и мно-
гошаговых нелинейных дискретных схем [9]. Устойчивость гарантирует, что
L1-норма ошибки аппроксимации всегда ограничена сверху одной и той же
константой.
Уравнения фильтра Вонэма являются частным случаем нелинейных сто-
хастических уравнений типа Кушнера-Стратоновича. Для этого класса раз-
работаны различные алгоритмы решения, обладающие свойством устойчиво-
сти:
- процедуры, основанные на слабой аппроксимации исходных процессов
марковскими цепями [10, 11],
- варианты схемы дробных шагов [12],
- робастные процедуры, основанные на преобразовании Кларка [13, 14],
- схемы, связанные с представлением распределений через их логарифм [15],
и др. Все эти алгоритмы созданы для систем аддитивных винеровских шумов
в наблюдениях и базируются на гирсановской замене вероятностной меры.
Различные алгоритмы численного решения стохастических дифференциаль-
ных уравнений со скачками изложены в [16], а в приложении к решению за-
дач оценивания и управления для систем с мультипликативными шумами -
в [17-19].
Последние исследования заставляют вернуться к данной теме. В [20] пред-
ставлено обобщение результата Вонэма на случай мультипликативных шу-
мов в наблюдениях. Известно [24], что задачи фильтрации по наблюдениям с
мультипликативными шумами сводятся к оцениванию по косвенным наблю-
дениям с вырожденными шумами: в их качестве выступают квадратические
характеристики шумов в наблюдениях - процессы, не доступные прямому на-
блюдению, которые сами являются результатом некоторого предельного пе-
рехода. В заметке [25] предложена идея аппроксимации обобщенного фильтра
Вонэма с помощью дискретизации наблюдений и их последующего оптималь-
ного использования, однако численно реализуемый алгоритм, равно как и его
точностные характеристики, не представлены.
12
На проблему численной реализации алгоритма оптимальной фильтрации
стохастической системы с непрерывным временем можно взглянуть с другой
точки зрения. При решении современными средствами вычислительной тех-
ники задач фильтрации по имеющимся непрерывным наблюдениям на первом
этапе их дискретизуют, либо они изначально поступают уже в дискретизо-
ванном виде со средств наблюдения. На следующем этапе обработки обычно
подбираются численные методы, обеспечивающие при уменьшении шага дис-
кретизации по времени сильную или слабую сходимость получаемых аппрок-
симаций к решению задачи оптимальной фильтрации по непрерывным на-
блюдениям. За редким исключением (см. [26, 27]) авторы не предпринимают
попыток оптимизировать процесс обработки дискретизованных наблюдений.
А ведь решение задачи оптимальной фильтрации состояний МСП по наблю-
дениям, дискретизованным по времени, во-первых, дало бы наилучшее при-
ближение точного решения уравнений фильтра Вонэма и, во-вторых, гаран-
тировало бы устойчивость этой аппроксимации. Более того, решение задачи
оптимальной фильтрации по дискретизованным наблюдениям без дополни-
тельных предположений о малости шага по времени имеет самостоятельную
практическую ценность. Отказ от такого подхода объясняется узостью клас-
са стохастических дифференциальных систем наблюдения, которые можно
точно дискретизовать по времени так, чтобы итоговая система являлась ре-
куррентной системой с дискретным временем и некоторым белым шумом в
правой части. Помимо этого, в ряде реальных задач шаг дискретизации на-
блюдений не может быть уменьшен в связи с техническими ограничениями
используемых измерительных средств или из-за необходимости проведения
некоторой предобработки (осреднения, сглаживания и т.д.) ¾сырых¿ наблю-
дений.
Целью первой части работы является представление решения задач L1-оп-
тимальной фильтрации состояния МСП по непрерывным и дискретизован-
ным наблюдениям с аддитивными и/или мультипликативными шумами, а
также устойчивых аппроксимаций данного решения. Статья имеет следую-
щую структуру. Раздел 2 содержит постановку задач фильтрации МСП.
В разделе 3 представлены решения этих задач: L1-оптимальные оценки филь-
трации совпадают с оценками максимума апостериорной вероятности. Это
значит, что для их определения нужно знать условное распределение МСП
относительно имеющихся наблюдений. Условное распределение вычисляется
рекуррентно в виде некоторой дроби, представляющей собой формулу Байе-
са. Числитель и знаменатель в ней содержат интегралы - дисперсионно-сдви-
говые смеси гауссовских распределений. Смешивающим в них является рас-
пределение времени пребывания МСП в том или ином состоянии на времен-
ном отрезке дискретизации наблюдений. Так как смешивающее распределе-
ние имеет громоздкий вид, оптимальную оценку предлагается приближать
сходящейся последовательностью устойчивых аппроксимаций, ограничиваю-
щих возможное число скачков МСП на интервале дискретизации. Для этих
аппроксимаций получены локальная и глобальная характеристики точности.
Данные сведения изложены в разделе 4. В числителе и знаменателе анали-
тических аппроксимаций присутствуют слагаемые - интегралы, не вычис-
ляемые аналитически. Выбор той или иной схемы их численной реализации
13
влияет на итоговую точность полученных оценок. В разделе 5 представлены
локальная и глобальная характеристики влияния ошибок численного инте-
грирования на отклонение приближенного решения от оптимального. Анализ
полученных результатов и их обсуждение представлены в разделе 6.
2. Постановка задачи L1-оптимальной фильтрации
На полном вероятностном пространстве с фильтрацией (Ω, F, P, {Ft}t≥0)
рассматривается стохастическая динамическая система
∫t
(2.1)
Xt = X0 + Λ⊤Xsds + µs,
0
∫t
∫
t
∑
(2.2)
Yt = fXsds +
Xnsg1/2ndWs,
n=1
0
0
где
Xt ≜ col(X1t,... ,XNt ) ∈ SN - ненаблюдаемое состояние системы, яв-
ляющееся однородным МСП с конечным множеством состояний SN ≜
≜ {e1, . . . , eN } (SN - множество единичных векторов евклидова простран-
ства RN ), матрицей интенсивностей переходов Λ и начальным распределе-
нием π;
µt ≜ col (µ1t,... ,µNt ) ∈ RN
Ft-согласованный мартингал;
Yt ≜ col (Y1t,... ,YMt ) ∈ RM
косвенные наблюдения, зашумленные
Ft-согласованным стандартным винеровским процессом Wt ≜ col (W1t,
...,WMt)∈RM; f
(M × N)-мерная матрица плана наблюдений, а набор
симметричных матриц {gn}n=1,N характеризует интенсивности шумов в за-
висимости от текущего состояния Xt.
Возможны два варианта статистической информации для последующего
оценивания состояния МСП.
1. Наблюдению полностью доступен процесс Y ; поток σ-алгебр, им порож-
денный, обозначен следующим образом: Ot ≜ σ {Ys : 0 ≤ s ≤ t}.
2. Наблюдению доступны приращения исходного непрерывного процесса Y
при равномерной дискретизации времени с шагом h > 0:
∫tr
∫
tr
∑
(2.3)
Yr =
fXsds +
Xnsg1/2ndWs
,
r ∈ N,
n=1
tr-1
tr-1
где tr ≜ rh - точки полученной сетки. Неубывающее семейство σ-алгебр, по-
рожденное последовательностью {Yr}r∈N, обозначено следующим образом:
Or ≜ σ{Yℓ : 0 ≤ ℓ ≤ r}, O0 ≜ {∅, Ω}.
Расстояние между точками α = col (α1, . . . , αN ) и β = col (β1, . . . , βN ) в
∑
пространстве RN определяется с помощью L1-нормы: ∥α-β∥1 ≜
|αn -βn|.
n=1
14
Задача L1-оптимальной фильтрации состояния X по непрерывным на-
блюдениям Y заключается в нахождении такой оценкиXt, t ≥ 0, что
{
}
(2.4)
Xt ∈ Argmin E
∥Xt - Xt∥1 ,
Xt∈Xt
где Xt - множество всех таких Ot-согласованных процессовXt с конечным
∑
Xn
первым моментом, что
≡ 1 с вероятностью 1.
t
n=1
Задача L1-оптимальной фильтрации состояния X по дискретным на-
блюдениям Y заключается в нахождении такой оценкиXr, r ∈ N состояния
МСП Xrh, что
{
}
(2.5)
Xr ∈ Argmin E
∥Xr - Xrh∥1 ,
Xr∈Xr
где Xr - множество всех таких Or-согласованных последовательностей {Xr}
∑
Xn
с конечным первым моментом, что
≡ 1 с вероятностью 1.
r
n=1
В дальнейшем изложении, если какой-либо вектор-столбец α удовлетворя-
ет условию нормировки, то это условие будет записываться в форме 1α = 1,
где 1 - вектор-строка подходящей размерности, состоящая из единиц.
Исследуемая частично наблюдаемая динамическая система и поставлен-
ные задачи фильтрации имеют некоторые особенности.
Во-первых, процесс непрерывных наблюдений Yt может быть преобразован
к виду
∫t
(
)
∑
Yt =
Xn
s
fends + g1/2
n
dWs
n=1
0
Из него следует, что полезный сигнал Xt наблюдается в присутствии мульти-
пликативного шума - процесса броуновского движения с известными неслу-
чайными сносом и диффузией. В то же время в частном случае gn ≡ g,
n = 1,N процесс Yt может быть преобразован к виду
∫t
Yt = fXsds + g1/2Wt
0
и рассматриваться как полезный сигнал, аддитивно зашумленный процессом
броуновского движения с нулевым сносом и известной неслучайной диффу-
зией. Поэтому в общем случае Yt можно назвать наблюдениями с аддитив-
ными/мультипликативными шумами.
Во-вторых, дополнительное требование выполнения условия нормировки
для допустимых оценок представляется достаточно естественным, ведь все
возможные значения оцениваемого состояния Xt, образующие множество SN
координатных ортов пространства RN , также удовлетворяют этому свойству.
15
3. Решение задач L1-оптимальной фильтрации
Решать задачи фильтрации будем в предположении, что для (2.1) и (2.2)
выполняются следующие условия.
а. Исследуемое вероятностное пространство с фильтрацией имеет вид
(
)
{
}
ΩX × ΩW , FX × FW , PX × PW ,
FXt × FW
,
t
t≥0
и процессы Xt(ωX ) и Wt(ωW ) независимы.
б. Шумы в наблюдениях равномерно невырожденные, т.е. gn > 0 для всех
n = 1,N.
Приведенные выше условия являются естественными для задач фильтрации
и не обременительными.
Пусть xt ≜ E {Xt|Ot} и xr ≜ E {Xtr |Or} - векторы условных математи-
ческих ожиданий (УМО) состояния МСП Xt относительно непрерывных и
дискретизованных наблюдений, которые в силу того, что Xt ∈ SN , совпадают
с условными распределениями. Построим по этим условным распределениям
xt и xr оценки максимума апостериорной вероятности:
Xt = en∗, где n∗ ∈ Argmaxxnt
n=1,N
оценка максимума апостериорной вероятности по непрерывным наблюде-
ниям,
Xr = en∗ , где n∗ ∈ Argmax xnr
n=1,N
оценка максимума апостериорной вероятности по дискретизованным на-
блюдениям.
Лемма 1. Решение задач L1-оптимальной фильтрации по непрерывным
и дискретизованным наблюдениям доставляется оценками максимальной
апостериорной вероятности.
Доказательство леммы 1 дано в [21, с. 125].
Результат леммы нуждается в некоторых комментариях. Во-первых,
L1-оптимальная оценка не единственна. В качестве нее может выступать
любой орт с номером, соответствующим максимальной условной вероят-
ности, в случае, если таких компонент несколько. Более того, в качестве
L1-оптимальной оценки может выступать любая выпуклая комбинация по-
добных ортов. Однако представляется, что практического значения такая
неединственность не имеет. Ниже будет получен явный вид условного рас-
пределения как относительно непрерывных, так и дискретизованных наблю-
дений. Анализируя вид последних, можно сделать вывод: условные распреде-
ления получаются путем рекуррентного нелинейного преобразования невы-
рожденных гауссовских случайных векторов, поэтому вероятность появления
двух или более условных мод равна нулю. Поиск условий, при которых услов-
ные моды не единственны с положительной вероятностью, не входит в цели
данной работы.
16
Во-вторых, факт, что L1-оптимальной оказалась оценка максимума апо-
стериорной вероятности, является не вполне очевидным. Например, в класси-
ческой статистической задаче оценивания скалярного параметра относитель-
но L1-критерия [22] оптимальной оказывается выборочная медиана. Согласно
классической монографии [23, Sect. 2.3, Problem 3.3] медиана апостериорного
распределения также является L1-оптимальной оценкой случайного скаляр-
ного параметра. Кстати, к этому же случаю сведется L1-оптимальная филь-
трация состояния МСП в случае, если его фазовым пространством высту-
пит некоторое конечное подмножество числовой оси, например {1, 2, . . . , N}.
Результат леммы 1 базируется именно на том, что фазовым пространством
для Xt выступает множество единичных ортов SN . Выбор такого фазового
пространства вполне распространен (см., например, [5]) и весьма эффективен
при математических выводах.
Стохастическая дифференциальная система, определяющая УМО xt отно-
сительно непрерывных наблюдений, представлена в [20]. Рекуррентная схема
вычисления УМО xt относительно дискретных наблюдений представлена в
заметке [25]. Схема является основой построения алгоритмов численного ре-
шения задач фильтрации, представленных в данной работе, поэтому ниже
приведен ее корректный вывод.
Воспользуемся подходом из [28]. Применим метод математической индук-
ции. При r = 0
(3.1)
x0 = E {X0|O0} = E {x0
}=π.
П{сть для н}которого r ∈ N известно условное распределение
xr-1 =
=E
Xtr-1 |Or-1
. Определим УМО xr на следующем шаге. Для этого необхо-
димо найти совместное распределение (Xtr , Yr) относительно Or-1. Из моде-
ли наблюдений и леммы 7.5 [29] следует, что распределение Yr относительно
σ-алгебры FXt
∨ Or-1 является гауссовским с параметрами
r
{
}
∑
(3.2)
E
Yr|FXt
=fτr,
cov(Yr, Yr|FXt)= τnrgn,
r
r
n=1
∫ tr
где τr = col (τ1r, . . . , τNr ) ≜
Xsds - случайный вектор, n-я компонента ко-
tr-1
торого равна случайному времени пребывания процесса X в состоянии en на
отрезке [tr-1, tr]. Ниже в изложении будем использовать следующие обозна-
чения:{
}
∑
D ≜ u = col(u1,...,uN) : un ≥ 0,
un = h
- (N -1)-мерный симплекс
n=1
в пространстве RM - носитель распределения τr;
{
}
∑
Π ≜ π = col(π1,...,πN) : πn ≥ 0,
πn = 1
-
¾вероятностный сим-
n=1
плекс¿, множество возможных начальных распределений π;
NXr - случайное число скачков состояния Xt, произошедших на отрезке
времени [tr-1, tr],
{
}
∏r
asr ≜
ω ∈ Ω : NXr (ω) ≤ s
, Asr ≜
asq;
q=1
17
ρk,ℓ,q(du) - распределение вектора Xℓtr I{q}(NXr)τr при условии Xtr-1 = ek,
т.е. для любого G ∈ B(RM ) верно равенство
∫
{
}
E IG(τr)I{q}(NXr)Xℓ
|Xtr-1 = ek
= ρk,ℓ,q(du);
tr
G
{
}
N(y, m, K) ≜ (2π)-M/2det-1/2K exp
-12∥y - m∥2K-1
M -мерная плот-
ность гауссовского распределения с математическим ожиданием m и невы-
рожденной ковариационной матрицей K;
∥α∥2K ≜ α⊤Kα,
〈α, β〉K ≜ α⊤Kβ.
В силу марковского свойства {(Xtr , Yr)}r≥0, формулы полной вероятно-
сти и теоремы Фубини для любого множества A ∈ B(RM ) верна следующая
цепочка равенств:
{
{
}
{
}
}
E
Xtr IA(Yr)
Or-1
= E E XtrIA(Yr)
FXt
∨Or-1
Or-1
=
r
∫
∑
gp dyOr-1
=
=EXtr Ny,fτr,τr
p=1
A
∫
∑
gp dyXtr-1 ∨ Or-1
Or-1
=
=EEXtr Ny,fτr,τr
p=1
A
∫
∫
∑∑
∑
e⊤
k
Xtr-1
Ny,fu, upgp dyρk,ℓ,q(du)Or-1
=
=Eeℓ
ℓ=1
q=0 k=1
p=1
D A
∫
∑ ∫
∑
∑
∑
= eℓ
xk
Ny,fu, upgpρk,ℓ,q(du) dy
r-1
ℓ=1
q=0D
p=1
A k=1
из чего следует, что интегранд в квадратных скобках в последнем выражении
определяет искомое совместное распределение (Xtr , Yr) относительно Or-1.
Тогда условное распределение xr покомпонентно определяется с помощью
обобщенного варианта формулы Байеса [29]
(
)
N
∑
∫
∑
xk
N Yr,fu,
upgp ρk,j,q(du)
r-1
q=0 D
p=1
(3.3)
xjr =k=1
(
)
,
j = 1,N.
∑
∑
∫
∑
xi
N Yr,fv,
vngn ρi,ℓ,c(dv)
r-1
i,ℓ=1
c=0 D
n=1
Таким образом, доказана следующая
Лемма 2. Если для системы наблюдения (2.1), (2.3) верны условия а и б,
то условное распределение xr определяется формулой (3.1) при r = 0 и ре-
куррентным соотношением (3.3) в моменты tr получения наблюдений Yr.
18
В [30] в качестве иллюстративного примера рассматривалась задача
СК-оптимальной фильтрации состояний МСП по дискретизованным наблю-
дениям, полученным в некоторые неслучайные моменты времени. В этой ра-
боте оценка фильтрации определяется также с помощью некоторой рекур-
рентной процедуры. Однако в [30] эта процедура записана в абстрактной
форме: интегранды в ее числителе и знаменателе содержат условные мате-
матические ожидания без указания, как их можно вычислить. В данной же
работе все интегранды в числителе и знаменателе (3.3) явным образом опре-
делены и могут быть вычислены аналитически или численно сколь угодно
точно.
4. Аналитическая аппроксимация условного распределения и ее точность
Рекурсия (3.3) не может быть непосредственно реализована в виде некото-
рой численной схемы: суммы бесконечных рядов из интегралов в числителе
и знаменателе не могут быть вычислены аналитически. Поэтому их предла-
гается заменить конечными рядами, а векторную последовательность xr(s),
вычисляемую покомпонентно с помощью рекурсии
(
)
∑∫
∑
N xkr-1(s)
N Yr,fu, upgp ρk,j,q(du)
q=0D
p=1
(4.1)
xjr(s) =k=1
(
)
,
j = 1,N
∑
∑
∫
∑
xir-1(s)
N Yr,fv, vngn ρi,ℓ,c(dv)
i,ℓ=1
c=0D
n=1
назовем аналитической аппроксимацией s-го порядка условного распределе-
ния. Легко видеть, что аппроксимация xr(s) обладает свойством устойчиво-
сти.
Так как искомая L1-оптимальная оценкаXr является функцией условно-
го распределения xr, которое может быть вычислено только приближенно в
форме аппроксимации xr(s), то важным представляется определить степень
близости xr и xr(s).
Введем следующие обозначения для неотрицательных случайных величин
и матриц из них:
∫
∑
∑
ξkjq ≜
NYq,fu, upgp ρk,j,m(du),
m=0D
p=1
∫
(4.2)
∑
∑
θkjq ≜
NYq,fu, upgp ρk,j,m(du),
m=0D
p=1
ξq ≜ ∥ξkjq∥k,j=1,N,
θq ≜ ∥θkjq∥k,j=1,N.
Оценки xr (3.3) и xr(s) (4.1) могут быть записаны в рекуррентной форме:
(
)-1
(4.3)
xr =
1θ⊤rxr-1
θ⊤rxr-1,
(
)-1
(4.4)
xr(s) =
1ξ⊤rxr-1(s)
ξ⊤rxr-1
(s).
19
Определим характеристики близости оценок {xr(s)} и {xr}. Так как система
(2.1), (2.3) является автономной, то в качестве локальной характеристики
точности аппроксимации {xr(s)} может быть выбрана величина
∑
{
}
(4.5)
σ(s) ≜ supE {∥x1 - x1(s)∥1} = sup
E
|xj1 - xj1(s)|
,
π∈Π
π∈Π j=1
определяющая, насколько сильно рекурсии (3.3) и (4.1) разойдутся за один
шаг, стартуя из одной точки π.
Обе схемы, примененные r раз, позволяют вычислить и оценки xr и xr(s)
в точке tr. В качестве глобальной характеристики точности аппроксимации
в этом случае естественно рассмотреть величину
∑
{
}
(4.6)
Σr(s) ≜ supE {∥xr - xr(s)∥1} = sup
E
|xjr - xjr(s)|
,
π∈Π
π∈Π j=1
определяющую, насколько сильно рекурсии (3.3) и (4.1) разойдутся за r ша-
гов, стартуя из единой точки π.
В отличие от традиционных показателей точности [6], представляющих
собой L2-норму ошибок аппроксимации, предлагаемые характеристики свя-
заны с L1-нормой.
Следующее утверждение определяет верхние оценки величин σ(s) и Σr(s).
Теорема 1. В условиях леммы 2 верны неравенства
(λh)s+1
(4.7)
σ(s) ≤ 2C1
(s + 1)!
и
(
)r
(λh)s+1
(4.8)
Σr(s) ≤ 2 - 2
1-C1
,
(s + 1)!
где λ ≜ max1≤n≤N |λnn|, а C1 = C1(h, λ) ∈ (0, 1) - параметр
∑
(s + 1)!
(λh)k
(4.9)
C1 ≜ e-λh
(λh)s+1
k!
k=s+1
При этом верно неравенство
(λh)s+1
C1 (s + 1)!<1.
Доказательство теоремы 1 приведено в Приложении.
Неравенства (4.7) и (4.8) имеют следующую интерпретацию. Для произ-
вольной устойчивой оценки xr ее отклонение от оптимальной xr не превосхо-
дит 2:
maxE {∥xr - xr∥1} = 2.
x,r,π
20
Аппроксимация x1(s) построена в предположении, что на интервале дискре-
тизации наблюдений длиной h состояние МСП совершит не более s скач-
(λh)s+1
ков. При этом величина C1
ограничивает сверху вероятность того, что
(s+1)!
число скачков превзойдет порог s. Правая часть неравенства (4.7) является
произведением максимально возможного промаха на вероятность превыше-
ния порога s числом скачков. Глобальная оценка (4.8) построена аналогично:
предполагается, что максимальное расхождение xr(s) и xr может произойти
в том случае, если хотя бы на одном из r отрезков длины h МСП X совершит
более s скачков.
Утверждения теоремы 1 имеют практическую пользу. В них нет требова-
ний асимптотики по параметрам s и h: представленные оценки точности носят
универсальный характер. В подавляющем большинстве современных цифро-
вых систем управления частота съема измерений фиксирована или ограниче-
на сверху. В некоторых случаях имеются дополнительные алгоритмические
ограничения на интервал дискретизации: исходные ¾сырые¿ данные должны
быть подвергнуты предварительной обработке типа сглаживания, осредне-
ния и т.п. Например, использование диффузионной аппроксимации процессов
восстановления [31] правомерно лишь при значительных интервалах осред-
нения, длина которых зависит от моментных характеристик времени между
скачками.
Неравенство (4.8) позволяет также получить следующие асимптотические
результаты. При фиксированных (h, s) и r → +∞ глобальная ошибка Σr(s)
экспоненциально стремится к своему максимально возможному значению 2,
причем делает это тем медленнее, чем меньше показатель локальной ошибки
(λh)s+1
C1(s+1)! .
Рассмотрим глобальный показатель точности аппроксимации в фиксиро-
ванный момент времени T при асимптотике h → 0. В этом случае r =Th ,
и из (4.8) следует цепочка неравенств
(
)r
(λh)s+1
Σr(s) ≤ 2 - 2
1-
=
(s + 1)!
[
(
(
))]
(λT )s+1
= 2 1 - exp rln
1-
≜ Sr(s).
(s + 1)!rs+1
При достаточно больших r имеет место эквивалентность
(
)
(λT )s+1
(λT )s+1
ln
1-
∼-
,
(s + 1)!rs+1
(s + 1)!rs+1
т.е.
(
)s
[
(
)]
λT
(λT )s+1
Sr(s) ∼ 2 1 - exp
-r
= 21 - exp -λTr
.
(s + 1)!rs+1
(s + 1)!
В то же время, чтобы сохранить свойство оценки сверху, можно воспользо-
ваться неравенством ln(1 - x) > -x - x2, верным для любых x ∈ (0,12 ): как
21
200
400
600
800
-
-
-
-
-
-
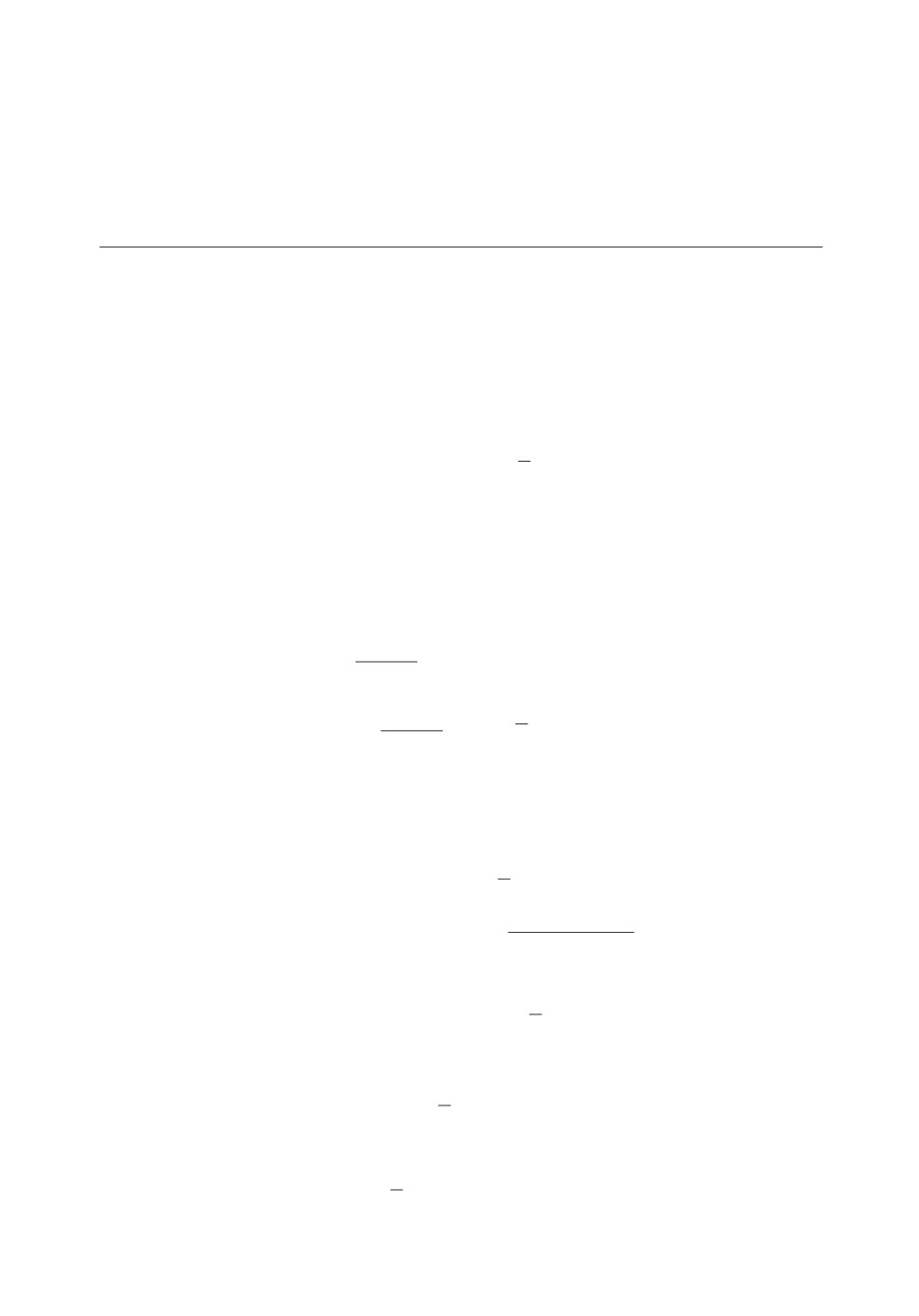
Sr(1)
Sr(2)
Sr(3)
Sr(1)
Sr(2)
Sr(3)
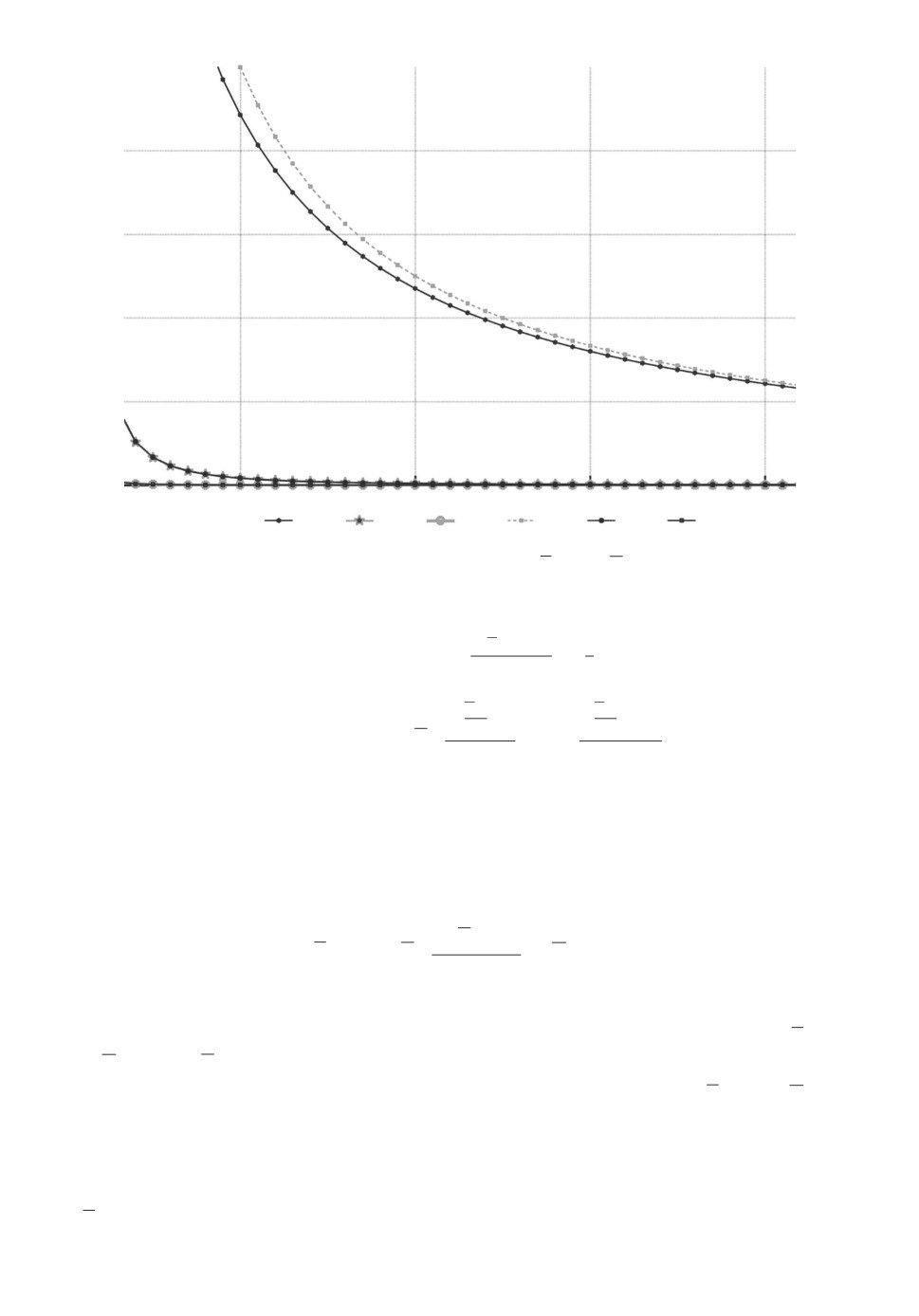
Сравнение показателей глобальной точности Sr(s) и Sr(s) аналитических
аппроксимаций порядков s = 1, 2, 3.
только r станет настолько велико, что(λT)s+1
<12, то
(s+1)!rs+1
(
)s
(
)s+1
λT
λT
r
r
Σr(s) ≤ 2
1 - exp−λT
1+
(s + 1)!
(s + 1)!
Для определения порядка точности более предпочтительна верхняя оценка
точности Σr(s) в виде степенной функции шага дискретизации h. Используя
неравенство (1 - x)r > 1 - rx, верного для любого x ∈ (0, 1) и r > 1, можно
получить следующую оценку сверху
s
(λT )
Sr(s) ≤ 2λT
≜ Sr(s).
(s + 1)!rs
Для иллюстрации влияния порядка аппроксимации s на показатель гло-
бальной точности на рисунке приведены зависимости от r величины Sr(s)
и Sr(s) для λ = 10, T = 1 и s = 1,2,3.
Из рисунка следуют два вывода. Во-первых, показатели Sr(s) и Sr(s)
очень близки друг к другу за исключением случая s = 1. Во-вторых, уве-
личение степени аппроксимации значительно повышает ее точность, напри-
мер, при s = 2 и r = 100 (т.е. h = 0,1) показатель точности составляет 0,33,
что для порядка s = 1 не достигается даже при r = 1000 (т.е. при h = 0,01):
S1000(1) = 0,1.
22
5. Численная аппроксимация условного распределения и ее точность
В рекуррентной схеме (4.4) требуется вычисление интегралов ξrj , что
невозможно сделать аналитически. Использование численного интегрирова-
ния вносит дополнительные ошибки. Исследуем их влияние на общую точ-
ность аппроксимации условного распределения.
Значения интегралов ξij(y) аппроксимируются суммами
∑
∑
ξij(y) ≈ ψij(y) ≜
Ny,fwℓ, wpgp̺ijℓ,
ℓ
(5.1)
ℓ=1
p=1
ψ(y) ≜ ∥ψij (y)∥i,j=1,N ,
определяемыми множеством пар {(wℓ, ̺ijℓ )}ℓ=1,L. Здесь ̺ijℓ ≥ 0 (ℓ = 1, L) - ве-
∑
са,
∑ ̺ijℓ ≤ W ≤ 1, а wℓ ≜ col(w1ℓ,...,wNℓ ) ∈ D - точки. Аналогично мат-
j=1 ℓ=1
рицам ξq строятся их аппроксимации ψq ≜ ∥ψij (Yq)∥i,j=1,N .
По построению элементы матрицы ψq являются положительными случай-
ными величинами, поэтому приближенная оценка xr, вычисляемая рекур-
рентно по формуле
(
)-1
(5.2)
xr ≜
1ψ⊤r xr-1
ψ⊤rxr-1,
обладает свойством устойчивости.
Обозначим
(5.3)
γkj ≜ ψkj - ξkj,
γr ≜
γkj(Yr)
,
k,j=1,N
(5.4)
γkj ≜ |γkj|,
γr ≜
|γkj (Yr)|
k,j=1,N
ошибки аппроксимации интегралов и их абсолютные значения.
Рекуррентная схема вычисления xr (4.4) заменяется на схему (5.2), при
этом обе рекурсии стартуют из одного и того же начального условия π.
Схемы (4.4) и (5.2) строились в расчете на выполнение события Asr, т.е.
на непревышение числом скачков порога s на всех интервалах [tq-1, tq], при-
надлежащих отрезку [0, tr]. Поэтому показатель близости xr и xr(s) нужно
выбирать с учетом этого ограничения. В качестве локальной характеристики
будем рассматривать псевдометрику
{
}
{
}
∑
(5.5)
ε(s) ≜ supE
Ias
(ω)∥x1 - x1(s)∥1
= sup E Ias(ω)|xj1 - xj1(x)|
1
1
π∈Π
π∈Π j=1
Глобальный показатель близости определяется аналогично:
{
}
∑
{
}
(5.6) Er(s) ≜ supE
IAs
(ω)∥xr - x1(x)∥1
= sup E
IAs
(ω)|xnr - xnr(x)|
r
r
π∈Π
π∈Πn=1
23
Эти величины характеризуют разницу применения алгоритмов (4.4) и (5.2)
за один и r шагов при выполнении ограничений на число скачков состояния,
описанных выше.
Теорема 2. Если для схемы (5.1) приближенного вычисления интеграла
(4.2) выполняется неравенство
∫
∑
(5.7)
max
|ψij (y) - ξij
(y)|dy < δ,
i=1,N j=1
RM
то для локального и глобального показателей близости верны оценки сверху
(5.8)
ε(s) ≤ 2δ,
Er(s) ≤ 2rWr-1
δ.
Доказательство теоремы 2 приведено в Приложении.
Возможность характеризации точности численного решения задачи филь-
трации, стохастической по своей природе, с помощью условия (5.7), относя-
щегося к чистому математическому анализу, представляется замечательной.
∑
Далее, если сумма весов W =ℓ,j ̺ijℓ отделена от единицы, т.е. W < 1, гло-
бальный показатель ошибки численного интегрировния Er(s) растет с увели-
чением r сублинейно, так же как и глобальный показатель ошибки аналити-
ческой аппроксимации Σr(s). При этом следует отметить, что в классических
численных методах решения стохастических дифференциальных уравнений
глобальная ошибка растет линейно с ростом времени интегрирования [6].
Характеристики точности аналитической аппроксимации и ее численной
реализации должны быть объединены в единый показатель. Если выполня-
ются условия теорем 1 и 2, то
{
}
τ (s) ≜ sup E
∥x1 - x1∥1
≤
π∈Π
{
}
≤ sup
E Ias(ω)∥x1 - x1(s) + x1(s) - x1∥1 + Ias(ω)∥x1 - x1(s)∥1
≤
1
1
π∈Π
(5.9)
{
}
{
}
≤ 2P {as1} + supE
∥x1(s) - x1∥1
+ sup
E Ias(ω)∥x1 - x1(s)∥1
=
1
π∈Π
π∈Π
s+1
(λh)
= 2P {as1} + σ(s) + ε(s) ≤ 4
+ 2δ.
(s + 1)!
Итоговый глобальный показатель близости условного распределения xr ≜
≜ E {Xr|Or} и его приближения xr может быть ограничен сверху аналогич-
ным образом:
[
(
)r]
s+1
(λh)
(5.10)
T(s) ≜ supE {∥xr - xr∥1} ≤ 4
1-
1-
+ 2rWr-1
δ.
π∈Π
(s + 1)!
Вообще говоря, параметры аналитической аппроксимации (h, s) и числен-
ного интегрирования δ могут выбираться независимо друг от друга. Однако
24
наличие ограничений по доступным вычислительным ресурсам и требований
к точности аппроксимации ведут к совместной оптимизации данных пара-
метров.
Тем не менее при разработке эффективных алгоритмов численного ре-
шения задачи фильтрации состояний МСП по непрерывным наблюдениям
эти параметры нуждаются в совместном оптимальном выборе. Зафиксиру-
ем некоторый горизонт T и порядок аналитической аппроксимации s. Бу-
дем увеличивать число шагов r → ∞, а значит уменьшать шаг дискретиза-
ции h =Tr → 0. В этом случае в силу неравенства Бернулли и неравенства
0<W≤1
[
(
)r]
{
}
(λh)s+1
supE
xT/h - xT/h
≤4 1-
1-
+ 2rWr-1δ ≤
1
π∈Π
(s + 1)!
s+1
(λh)
(λh)s
(5.11)
≤ 4r
+ 2rWr-1δ = 4λT
+ 2rWr-1δ ≤
(s + 1)!
(s + 1)!
(
)
(λh)s
δ
≤ 2T
2λ
+
(s + 1)!
h
Первое слагаемое в скобках соответствует вкладу в суммарную ошибку, опре-
деляемую аналитической аппроксимацией, второе - вкладу ошибки числен-
ного интегрирования. Ясно, что оптимальным будет выбор параметров, обес-
печивающий обоим слагаемым одинаковый порядок малости, который дости-
гается при δ ∼(λh)s+1
λ
6. Заключение
Решение задачи L1-оптимальной фильтрации состояний МСП по непре-
рывным или дискретизованным наблюдениям не может быть получено в яв-
ной аналитической форме. Для реализации решения средствами вычисли-
тельной техники требуются классы специальных алгоритмов приближенного
решения. Основным результатом данной статьи являются теоремы 1, 2 и фор-
мула (5.11), описывающие влияние выбранных аналитической аппроксима-
ции и схемы численного интегрирования на итоговую точность приближения
условного распределения. Сравнительный численный анализ конкретных ал-
горитмов, используемых для фильтрации состояний МСП по наблюдениям с
аддитивными и мультипликативными шумами, будет представлен во второй
части работы.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Используя обозначения Ξr ≜ ξ1ξ2 ...ξr
и Θr ≜ θ1θ2 ...θr для матриц со случайными элементами, оценки xr и xr(s)
можно выписать в явной форме:
(
)-1
(
)-1
xr =
1Θ⊤rπ
Θ⊤rπ,
xr(s) =
1Ξ⊤rπ
Ξ⊤rπ.
25
Из определения (4.2) следует, что ξqj ≤ θqj, поэтому матрица Θr - Ξr со-
держит только неотрицательные элементы. Для краткости запись зависимо-
сти от r в обозначениях Ξr и Θr будет опущена. Верна следующая цепочка
неравенств
{
}
1
1
E {∥xr - xr(s)∥1} = E
⊤π -
Ξ⊤π
=
1Θ⊤πΘ
1Ξ⊤π
1
{
}
1
=E
1Ξ⊤π(Θ - Ξ)⊤π - 1(Θ - Ξ)⊤πΞ⊤π
≤
1Θ⊤π1Ξ⊤π
1
(Π.1)
{
(
)}
1
≤E
1Ξ⊤π∥(Θ - Ξ)⊤π∥1 + 1(Θ - Ξ)⊤π∥Ξ⊤π∥1
=
1Θ⊤π1Ξ⊤π
{
}
1
= 2E
1(Θ - Ξ)⊤π
1Θ⊤π
Рассмотрим вспомогательную оценку
{
}
xr ≜ E
Xtr IAs
(ω)|Or
r
1
Из абстрактного варианта формулы Байеса следует, что xr =
Ξ⊤π и
1Θ⊤π
{
}
1
(Π.2)
=
(Θ - Ξ)⊤
π.
xr - xr = E Xtr IAsr (ω)|Or
1Θ⊤π
Из (Π.1) и (Π.2) следует, что для r = 1 и ∀ π ∈ Π
{
}
}
{
{
}
E
∥x1 - x1(s)∥1
≤ 2E
E
Xt1 Ias
(ω)|O1
=
1
1
{
}
(Π.3)
∑{
}
{
{
}}
= 2E
E Xn
t1
Ias
(ω)|O1
= 2E E
Ias
(ω)|O1
= 2P {as1} .
1
1
n=1
Процесс NXt общего числа скачков состояния Xt является считающим, и его
квадратическая характеристика равна
∫t
∑
〈NX , NX 〉t = -
λnnXnsds,
n=1
0
поэтому искомую вероятность можно оценить сверху следующим образом
∑
(λh)k
(λh)s+1
(Π.4)
P {as1} ≤ e-λh
=C1
k!
(s + 1)!
k=s+1
Из последнего неравенства и (Π.3) следует истинность неравенства σ(s) ≤
(λh)s+1
≤ 2C1
, т.е. оценка локальной точности (4.7) верна.
(s+1)!
26
t
) и (Π.4) можно оценить
)r
{
(λh)s+1
сверху и вероятность P
Asr}: P{Asr}
≤1- 1-C1
, из чего следует
(s+1)!
истинность оценки глобальной точности (4.8). Теорема 1 доказана.
Доказательство теоремы
2.
Итак,
x1 = (1ψ⊤1π)-1ψ⊤1π, x1 =
= (1ξ⊤1 π)-1ξ⊤1 π и Δ1 = x1 - x1. Используя свойства матричных операций,
легко показать, что [γ⊤π1 - 1γ⊤πI]γ⊤π = 0. Обе оценки обладают свойством
устойчивости, поэтому ∥x1∥1 = ∥x1∥1 = 1. Верна следующая цепочка нера-
венств:
1
∥Δ1∥1 =
1ξ⊤1πψ⊤1π - 1ψ⊤1πξ⊤1π
=
1ψ⊤1π1ξ⊤1π
1
1
=
1ξ⊤1πγ⊤1π - 1γ⊤1πξ⊤1π
=
1ψ⊤1π1ξ⊤1π
1
[
]
1
=
γ⊤1π1 - 1γ⊤1πI ξ⊤1π
=
1ψ⊤1π1ξ⊤1π
1
[
][
]
1
=
γ⊤1π1 - 1γ⊤1πI ξ⊤1π + γ⊤1π
=
1ψ⊤1π1ξ⊤1π
1
[
]
1
=
γ⊤1π1 - 1γ⊤1πI
X1
≤
1ξ⊤1π
1
[
]
1
≤
γ⊤1π1 - 1γ⊤1πI
X
1
≤
1ξ⊤1π
1
1
∑
γij1
∑
1γ⊤1π
j=1
≤2
=
πi
1ξ⊤π
∑
1
i=1
ξkℓ1πk
k,ℓ=1
Используя последнее неравенство, (5.7) и (Π.7), можно показать, что
∫
{
}
∑
∑
E
Ias
(ω)∥Δ1∥1
≤2
πi
γij(y)dy ≤ 2δ.
1
i=1
i=1
RM
Истинность первого неравенства (5.8) следует из того, что неравенство вверху
выполняется для любого π ∈ Π.
Определим матрицы со случайными элементами - функции от ξr и ψr:
{ ξqξq+1 ... ξr, если q ≤ r,
Ξq,r ≜
I
в противном случае,
{ ψqξq+1 ...ψr, если q ≤ r,
Ψq,r ≜
I
в противном случае,
Γq,r ≜ Ψq,r - Ξq,r.
27
Для доказательства теоремы 2 потребуется вспомогательная
Лемма 3. Если φr ≜ φr(Y1,...,Yr) - неотрицательная Or-измеримая
случайная величина и Φr ≜φr
, то
1Ξ⊤1,rπ
∫
∫
{
}
(Π.5)
E
IAs
(ω)Φr
= ... φr(y1,...,yr)dyr ...dy1.
r
RM RM
Доказательство леммы
3. Рассмотрим неотрицательную интег-
рируемую функцию φ1 = φ1(y) : RM → R+ и O1-измеримую случайную ве-
личину
φ1(Y1)
φ1(Y1)
(Π.6)
Φ1 ≜
=
(
)
1ξ⊤1(Y1)π
∑ s∑ ∫
∑
N Y1,fu, upgp ρi,j,m(du)πi
i,j=1 m=0 D
p=1
{
}
Найдем E
Ias
(ω)Φ1
:
1
{
}
E
Ias
(ω)Φ1
=
1
(
)
∑
∑
∑
N y,fv, vqgq ρk,ℓ,n(dv)πk
∫
∫ φ1(y)
k,ℓ=1 n=0
q=1
=
(
)
dy =
∑
∑ ∫
∑
RM D
N y,fu, upgp ρi,j,m(du)πi
i,j=1 m=0 D
p=1
(
)
(Π.7)
∑
∑ ∫
∑
N y,fv, vqgq ρk,ℓ,n(dv)πk
∫
k,ℓ=1 n=0D
q=1
= φ1
(y)
(
)
dy =
∑
∑ ∫
∑
RM
N y,fu, upgp ρi,j,m(du)πi
i,j=1 m=0 D
p=1
∫
= φ1(y)dy.
RM
Рассмотрим неотрицательную интегрируемую функцию φ2 = φ1(y1, y2) :
R2M → R+ и O2-измеримую случайную величину
φ1(Y1,Y2)
Φ2 ≜
=
1Ξ⊤1,2(Y1, Y2)π
φ2(Y1,Y2)
=
(
) (
)
∑
∑
∫ ∫
∑
∑
N Y1,fu1,
up1
gp1
N Y2,fu2, up2
gp2
ρi,i2,m1 (du1)ρi2,j,m2 (du2)πi
i,i2,j=1 m1,m2=0D D
p1=1
p2=1
28
{
}
и найдем E
IAs
(ω)Φ2
:
2
∫
∫
{
}
E
IAs
(ω)Φ2
=
φ2(y1,y2) ×
2
RM RM
(
) (
)
N
∑
∫ ∫
∑
∑
N y1,fv1,
vq1
gq1
N y2, fv2, vq2
gq2
ρk,k2,n1 (dv1)ρk2,ℓ,n2 (dv2)πk
k,k2,ℓ=1 n1,n2=0D D
q1=1
q2=1
×
(
) (
)
×
∑
∑
∫ ∫
∑
∑
N y1,fu1,
up
1gp1
N y2,fu2, up
2gp2
ρi,i2,m1 (du1)ρi2,j,m2 (du2)πi
i,i2,j=1 m1,m2=0D D
p1=1
p2=1
∫
∫
× dy2dy1 =
φ2(y1,y2)dy2dy1.
RM RM
{
}
Справедливость утверждения леммы в общем случае E
IAs
(ω)Φr
проверя-
r
ется аналогично. Лемма 3 доказана.
Оценим сверху норму ошибки Δr = xr - xr. Из определения матриц Ξ, Ψ
и Γ следует, что
∑
(Π.8)
Γ1,r ≜ Ψ1,r - Ξ1,r =
Ψ1,t-1γtΨt+1,r.
t=1
Проводя преобразования, аналогичные выкладкам для Δ1, получаем, что
[
]
1
∥Δr∥1 ≤
Γ⊤1,rπ1 - 1Γ⊤1,rπI
≤
1Ξ⊤1,rπ
1
(Π.9)
∑
1
≤2
1Ψ⊤t+1,rγ⊤tΨ⊤1,t-1π.
1Ξ⊤1,rπ
t=1
Для оценки вклада каждого слагаемого в (Π.9) используем (Π.5). Для
простоты изложения рассмотрим случай r = 3, функцию φ(y1, y2, y3) : R3M →
→R+
φ(y1, y2, y3) = 1ψ⊤(y3)γ⊤(y2)ψ⊤(y1)π
и O3-измеримую случайную величину Φ ≜φ(Y1,Y2,Y3)
. Оценим сверху сле-
1Ξ⊤1,3(Y1,Y2,Y3)π
дующее математическое ожидание:
∫
∫
∫
{
}
∑
E
IAs (ω)Φ
=
πiψij(y1)γjk(y2)ψkm(y3)dy3dy2dy1 =
3
i,j,k,m=1
RM RM RM
∫
∑ L∑
∑
∑
=
πi
̺ij
γjk(y2)dy2
̺kmn =
ℓ
i,j,k=1
ℓ=1
m=1 n=1
RM
∫
∑ L∑
∑
∑
∑∑
=W πi
̺ij
γjk(y2)dy2 ≤ Wδ
πi
̺ijℓ ≤ W2δ.
ℓ
i,j=1
ℓ=1
k=1
i=1
j=1 ℓ=1
RM
29
Действуя аналогичным образом, можно показать, что для произвольного
r≥2
{
}
π
1Ψ⊤t+1,rγ⊤tΨ⊤1,t-1
E IAs(ω)
≤ Wr-1δ.
r
1Ξ⊤1,rπ
{
}
Тогда окончательно E IAs(ω)∥Δr∥1
≤ 2rWr-1δ, и истинность второго нера-
r
венства (5.8) следует из того, что неравенство вверху выполняется для любого
π ∈ Π.
Теорема 2 доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Wonham W. Some applications of stochastic differential equations to optimal non-
linear filtering // SIAM J. Contr. Optim. 1964. P. 347-369.
2.
Rabiner L.R. A tutorial on hidden Markov models and selected applications in speech
recognition // Proc. IEEE. 1989. V. 77. P. 257-286.
3.
Ephraim Y., Merhav N. Hidden Markov processes // IEEE Transactions on Infor-
mation Theory. 2002. V. 48. No. 6. P. 1518-1569.
4.
Cappé O., Moulines E., Ryden T. Inference in Hidden Markov Models. Berlin:
Springer, 2005.
5.
Elliott R.J., Aggoun L., Moore J.B. Hidden Markov Models: Estimation and Control.
New York: Springer, 2008.
6.
Kloeden P., Platen E. Numerical Solution of Stochastic Differential Equations.
Berlin: Springer, 1992.
7.
Kahaner D., Moler C., Nash S. Numerical Methods and Software. New Jersey: Pren-
tice Hill, 1989.
8.
Isaacson E., Keller H. Analysis of Numerical Methods. New York: Dover Publica-
tions, 1994.
9.
Stoer J., Bulirsch R. Introduction to Numerical Analysis. New York: Springer, 1993.
10.
Кушнер Г. Вероятностные методы аппроксимации в стохастических задачах
управления и теории эллиптических уравнений. М.: Физматлит, 1985.
11.
Kushner H., Dupuis P. Numerical Methods for Stochastic Control Problems in Con-
tinuous Time. New York: Springer, 2001.
12.
Ito K., Rozovskii B. Approximation of the Kushner Equation for Nonlinear Filter-
ing // SIAM J. Contr. Optim. 2000. V. 38. No. 3. P. 893-915.
13.
Clark J. The design of robust approximations to the stochastic differential equations
of nonlinear filtering / J.K. Skwirzynski (ed.), Communication systems and random
process theory. Amsterdam. Sijthoff and Noordhoff, 1978.
14.
Malcolm V., Elliott R., van der Hoek J. On the numerical stability of time-discretized
state estimation via Clark transformations // Proc. 42nd IEEE Conf. Decis. Contr.
2003. Maui. P. 1406-1412.
15.
Yin G., Zhang Q., Liu Y. Discrete-time approximation of Wonham filters // J. Con-
trol Theory Appl. 2004. No. 2. P. 1-10.
16.
Platen E., Bruti-Liberati N. Numerical Solution of Stochastic Differential Equations
with Jumps in Finance. Berlin: Springer, 2010.
30
17.
Crisan D., Kouritzin M., Xiong J. Nonlinear filtering with signal dependent obser-
vation noise // Electron. J. Probab. 2009. No. 14. P. 1863-1883.
18.
Dragan V., Morozan T., Stoica A. Mathematical Methods in Robust Control of
Discrete-Time Linear Stochastic Systems. New York: Springer, 2010.
19.
Dragan V., Aberkane S. H2-Optimal Filtering for Continuous-Time Periodic Linear
Stochastic Systems with State-Dependent Noise // Syst. Control Lett. 2014. No. 66.
P. 35-42.
20.
Борисов А.В. Фильтрация Вонэма по наблюдениям с мультипликативными шу-
мами // АиТ. 2018. № 1. C. 52-65.
Borisov A.V. Wonham Filtering by Observations with Multiplicative Noises // Au-
tom. Remote Control. 2018. V. 79. No. 1. P. 39-50.
21.
Борисов А.В. Применение методов оптимальной фильтрации для оперативно-
го оценивания состояний сетей массового обслуживания // АиТ. 2016. № 2.
C. 115-141.
Borisov A.V. Application of Optimal Filtering Methods for On-Line of Queueing
Network States // Autom. Remote Control. 2016. V. 77. No. 2. P. 277-296.
22.
Хубер П. Робастность в статистике. М.: Мир, 1984.
23.
Anderson B., Moore J. Optimal Filtering. New Jersey: Prentice Hill, 1979.
24.
Takeuchi Y., Akashi H. Least-squares state estimation of systems with state-
dependent observation noise // Automatica. 1985. V. 21. No. 3. P. 303-313.
25.
Борисов А.В. Фильтрация состояний марковских скачкообразных процессов по
дискретизованным наблюдениям // Информатика и ее применения. 2018. Т. 12.
№. 3. C. 115-121.
26.
Bäuerle N., Gilitschenski I., Hanebeck U. Exact and Approximate Hidden Markov
Chain Filters Based on Discrete Observations // Statistics & Risk Modeling. 2016.
V. 32. No. 3-4. P. 159-176.
27.
James M., Krishnamurthy V., Le Gland F. Time Discretization of Continuous-Time
Filters and Smoothers for HMM Parameter Estimation // IEEE Trans. Autom.
Contr. 1996. V. 42. No. 2. P. 593-605.
28.
Бертсекас Д., Шрив С. Стохастическое оптимальное управление. Случай дис-
кретного времени. М.: Физматлит, 1985.
29.
Липцер Р.Ш., Ширяев А.Н. Статистика случайных процессов. М.: Наука, 1974.
30.
Cvitanić J., Liptser R., Rozovskii B. A filtering approach to tracking volatility
from prices observed at random times //Annals Appl. Probab. 2006. V. 16. No. 3.
P. 1633-1652.
31.
Боровков А.А. Асимптотические методы в теории массового обслуживания. М.:
Физматлит, 1995.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 02.03.2020
После доработки 20.05.2020
Принята к публикации 09.07.2020
31