Автоматика и телемеханика, № 11, 2020
© 2020 г. П.В. ПАКШИН, д-р физ.-мат. наук (pakshinpv@gmail.com),
Ю.П. ЕМЕЛЬЯНОВА, канд. физ.-мат. наук (emelianovajulia@gmail.com)
(Арзамасский политехнический институт (филиал)
Нижегородского государственного технического
университета им. Р.Е. Алексеева)
УПРАВЛЕНИЕ С ИТЕРАТИВНЫМ ОБУЧЕНИЕМ ДИСКРЕТНЫМИ
СТОХАСТИЧЕСКИМИ СИСТЕМАМИ С ПЕРЕКЛЮЧЕНИЯМИ1
Рассматриваются дискретные линейные системы с переключениями в
повторяющемся режиме. Системы находятся под действием случайных
внешних возмущений, и в измерениях присутствуют аддитивные шумы.
Предлагаются два метода синтеза управления с итеративным обучени-
ем. Оба метода основаны на построении вспомогательной 2D-модели в
форме дискретного повторяющегося процесса. Первый метод основан на
установлении условий диссипативности указанной модели при специаль-
ном выборе функций запаса и накопления. Такой выбор позволяет за-
тем найти управление, в общем случае нелинейное, которое гарантирует
сходимость процесса обучения. Второй метод использует линейный за-
кон коррекции управления с итеративным обучением заданного вида, при
этом сходимость процесса обучения гарантируется условиями устойчиво-
сти вспомогательной 2D-модели. Оба предложенных закона управления
используют в своей структуре стационарный фильтр Калмана. Для полу-
чения условий устойчивости используется дивергентный метод векторных
функций Ляпунова. Приводится пример, демонстрирующий возможности
и особенности нового метода.
Ключевые слова: управление с итеративным обучением, стохастические
системы, системы с переключениями, повторяющиеся процессы, 2D-си-
стемы, устойчивость, диссипативность, векторная функция Ляпунова.
DOI: 10.31857/S0005231020110069
1. Введение
Управление с итеративным обучением играет важную роль в повышении
точности систем, функционирующих в повторяющемся режиме, в частности
в разработке высокоточных роботов-манипуляторов. В связи с высокой эф-
фективностью и относительно простой формой такого управления оно при-
влекает широкий интерес как теоретиков, так и практиков. Начиная с конца
80-х гг. XX в. на крупнейших международных конференциях регулярно ор-
ганизуются сессии, посвященные проблемам управления с итеративным обу-
чением.
Реальные системы находятся под действием случайных возмущений, и в
системах всегда присутствуют как систематические, так и случайные погреш-
ности измерений. Эти факторы снижают точность управления, к тому же
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 19-08-00528_а).
93
следует учесть, что одним из условий эффективности итеративного обуче-
ния является то, что для каждого повторения процесса начальные условия
должны быть одинаковыми. Таким образом, учет упомянутых случайных
факторов имеет существенное значение.
Впервые идея управления с итеративным обучением была предложена в
патенте США [1] с приоритетом от 1967 г., затем концепция такого управ-
ления была сформулирована в [2] на японском языке. Эти результаты не
были востребованы, пока не появилась серия публикаций [3-6], вызвавшая
широкий интерес как теоретиков, так и практиков. В дальнейшем, по раз-
личным вопросам управления с итеративным обучением было опубликова-
но большое количество работ, в том числе монографии [7, 8], обзорные ста-
тьи [9, 10] и специальные выпуски журналов (Int. J. Control. 2000, 2011; Asian
J. Control. 2002, 2011). В настоящее время управление с итеративным обуче-
нием стало важным направлением интеллектуального управления, и оно ши-
роко используется во многих практических приложениях, в первую очередь
в робототехнике.
Обзор результатов по стохастическому управлению с итеративным обу-
чением представлен в [11, 12]. Эти обзоры и самостоятельный анализ пуб-
ликаций в базе SCOPUS показывают, что решению задачи стохастического
управления с итеративным обучением в классической постановке (измерения
содержат шумы и на объект управления действуют случайные возмущения)
посвящено небольшое число работ, основное внимание уделяется учету слу-
чайных потерь информационных пакетов в канале связи между измеряемым
выходом и входом (random packet losses, data dropouts). Исследование этих
вопросов, безусловно, важно, но оно не заменяет и не исключает исследова-
ний упомянутых классических задач.
Анализ упомянутых публикаций показывает, что конструктивные методы
синтеза стохастического управления с итеративным обучением в рамках клас-
сической постановки предложены в [13-18] для линейных систем с дискрет-
ным временем, другие работы учитывают только дополнительные к класси-
ческой постановке случайные факторы. В этих работах предложены алго-
ритмы двух типов. В [13, 14] предложен так называемый алгоритм D-типа,
использующий для построения алгоритма управления с итеративным обуче-
нием аналог производной ошибки обучения, в [15], дополнительно предложен
алгоритм P-типа, непосредственно использующий ошибку обучения, этот ал-
горитм затем был расширен и усовершенствован в [16], в [17, 18] рассмотрены
некоторые специальные вопросы, связанные со сходимостью и оптимизацией
этих алгоритмов.
В [19-21] задача управления с итеративным обучением решается на основе
предложенного авторами дивергентного метода векторных функций Ляпу-
нова в сочетании с использованием фильтра Калмана. Сравнительный ана-
лиз показал, что полученные результаты позволяют во много раз увеличить
скорость сходимости ошибки обучения по сравнению с [13-16], кроме того,
за счет применения фильтра Калмана существенно уменьшается дисперсия
ошибки.
94
В [22] для дискретных линейных систем с постоянными параметрами пред-
ложен алгоритм управления с итеративным обучением на основе совместно-
го применения метода супервектора [8] и фильтра Калмана. В силу того что
в [22] решается специальная задача, связанная с вариациями эталонной тра-
ектории, сравнить результаты этой работы c [13-16] и [19-21] не представ-
ляется возможным. По-видимому, по этой причине в [22] публикации [13-16]
даже не упоминаются.
В данной статье результаты [19, 20] распространяются на системы с пе-
реключениями. В современной теории управления под системами с переклю-
чениями обычно понимают класс моделей динамических систем, состоящих
из конечного числа подсистем, из которых в текущий момент времени функ-
ционирует лишь одна, называемая активной подсистемой, при этом выбор
активной подсистемы определяется некоторым логическим правилом. Про-
стейшим примером может служить многорежимная система, в которой под-
системы интерпретируются как отдельные режимы этой системы. Обычно
подсистемы описываются индексированным множеством дифференциальных
или разностных уравнений. Для первоначального знакомства с результатами
теории систем с переключениями можно рекомендовать [23-27]. При управ-
лении с итеративным обучением переключения возникают естественным об-
разом при начальной настройке системы. Например, в случае манипулятора,
перемещающего грузы на конвейер, целесообразно делать несколько повто-
рений без нагрузки и запускать рабочий режим при достижении требуемой
точности.
2. Постановка задачи
Рассмотрим дискретную стохастическую систему в повторяющемся режи-
ме, описываемую линейной моделью c переключениями
xk(p + 1) = A(k)xk(p) + B(k)uk(p) + vk(p), (A(k),B(k)) ∈ F,
(2.1)
yk(p) = Cxk(p),
ywk(p) = Cxk(p) + wk(p), p ∈ [0,T - 1], k = 0,1,... ,
где xk(p) ∈ Rnx - вектор состояния, yk(p) ∈ Rny - вектор выходных пере-
менных, ywk(p) ∈ Rny - вектор измеряемых переменных, uk(p) ∈ Rnu - век-
тор управления, vk(p) ∈ Rnv - вектор возмущений, действующих на объект,
wk(p)∈Rnw - вектор шумов измерений, F={(A1,B1),(A2,B2),... ,(AN ,BN )} -
множество пар матриц согласованных размеров. Предполагается, что vk(p) и
wk(p) - независимые гауссовские белые шумы с ковариационными матрицами
E[vk(p)vTk (p)] = Sv, E[wk(p)wTk (p)] = Sw.
Следуя понятиям, принятым в теории систем с переключениями [23], рас-
смотрим кусочно постоянное отображение множества неотрицательных це-
лых чисел Z+ → F. Такое отображение задается кусочно постоянной функ-
цией σ : Z+ → N = {1, . . . , N} так, что A(k) = Aσ(k) и B(k) = Bσ(k), k =
= 0, 1, 2, . . .
Функцию σ можно рассматривать как сигнал переключения относитель-
но повторений. Предположим, что переключения происходят в начале каж-
95
дого повторения, и определим моменты переключения k1, k2, . . . как номера
повторений, на которых в системе (2.1) происходят переключения. Таким
образом, сигнал переключения определяет на каждом повторении k индекс
i = σ(k) ∈ N активной подсистемы, динамика которой описывается уравне-
ниями
xk(p + 1) = Aixk(p) + Biuk(p) + vk(p), i ∈ N,
(2.2)
yk(p) = Cxk(p),
ywk(p) = Cxk(p) + wk(p), p ∈ [0,T - 1], k = 0,1,...
Выходная переменная системы (2.1) на каждом повторении должна вос-
производить желаемую траекторию yref (p), 0 ≤ p ≤ N - 1. Для достижения
этой цели можно использовать управление с обратной связью. Обозначим че-
рез ek(p) ошибку воспроизведения желаемой траектории на k-м повторении:
(2.3)
ek(p) = yref(p) - yk
(p),
0 ≤ p ≤ T - 1.
Если начальные условия на каждом повторении одинаковы, такое управление
будет обеспечивать одинаковую ошибку воспроизведения желаемой траекто-
рии на всех шагах, причем может оказаться, что величина этой ошибки не
соответствует требованиям по точности. Поставим задачу найти такое управ-
ление, которое последовательно уменьшает ошибку с увеличением числа по-
вторений. Такую задачу может решить управление с итеративным обучением,
которое на очередном повторении определяется соотношением
(2.4)
uk+1(p) = uk(p) + Δuk+1
(p),
где Δuk+1(p) - корректирующая поправка, формируемая на основе инфор-
мации с предыдущего повторения. Эту поправку будем находить из условия
выполнения соотношений
(2.5)
lim
E[||ek(p)||] = E||e∞(p)||, E[||ek+1(p)||] ≤ E[||ek(p)||]
∀ k,
k→∞
lim
E[||uk(p)||] = E[||u∞(p)||],
0 ≤ p ≤ T - 1,
k→∞
при этом limk→∞ E [ || ek(p) ||2 ] и limk→∞ E [ || uk(p) || ] = E [ || u∞(p) ||2 ] долж-
ны оставаться ограниченными для всех 0 ≤ p ≤ T - 1. Соотношение (2.4) мо-
жет рассматриваться как алгоритм итеративного обучения, а значение u∞(p)
называется обученным управлением.
Замечание 1. В приложениях процесс обучения считается завершен-
ным, когда достигнута требуемая точность. В рассматриваемом случае, когда
система находится под воздействием шумов, адекватной мерой точности мо-
жет служить среднее или среднеквадратичное значение ошибки на интервале
изменения выходной переменной и условие (2.5) является необходимым для
достижения требуемой точности.
Таким образом, задача состоит в нахождении корректирующей по-
правки Δuk+1(p), обеспечивающей выполнение (2.5) при ограниченности
96
limk→∞ E [ || ek(p) ||2 ] и limk→∞ E [ || uk(p) ||2 ] = E [ || u∞(p) ||2 ] для всех 0 ≤
≤ p ≤ T - 1.
Будем предполагать, что моменты переключений наблюдаемы. Поскольку
вектор выходных переменных измеряется с шумами, для его предварительной
обработки используем фильтр Калмана
xk(p + 1) = Aixk(p) + Biuk(p) + Fi(ywk(p) - Cxk(p)),
(2.6)
xk(0) = Fiywk(0), i ∈ N,
где xk(p) - оценка вектора состояния и ŷk(p) = C xk(p),
Fi = AiSiCT[CSiCT + Sw]-1
и Si - решение алгебраического уравнения Риккати
(2.7)
Si = AiSiATi - AiSiCT[CSiCT + Sw]-1CSiATi + Sw.
Введем в рассмотрение ошибку оценивания xk(p) = xk(p) - xk(p) и вспомога-
тельные векторы приращений по переменной k оценки вектора состояния и
ошибки оценивания,
(2.8)
ηk+1(p + 1) = xk+1(p) - xk(p),
ηk+1(p + 1) = xk+1(p) - xk(p).
Поскольку yk(p) недоступен для наблюдения, ошибка обучения
ek(p) = yref(p) - yk(p)
не может быть непосредственно использована для управления. Вместо нее
будем далее использовать оценку
êk(p) = yref (p) - C xk(p).
Запишем уравнения относительно приращений:
ηk+1(p + 1) = Ai11 ηk+1(p) + Ai12 êk(p) + Bi1νk+1(p) + Di1 wk+1(p),
(2.9)
êk+1(p) = Ai21 ηk+1(p) + Ai22 êk(p) + Bi2νk+1(p) + Di2 wk+1(p), i ∈ N ,
где
[
]T
ηk+1(p) =
ηk+1(p)T ηk+1(p)T
,
νk+1(p) = Δuk+1(p - 1),
[
]T
wk+1(p) =
Δvk+1(p - 1)T Δwk+1(p - 1)
,
Δvk+1(p - 1) = vk+1(p - 1) - vk(p - 1),
Δwk+1(p - 1) = wk+1(p - 1) - wk(p - 1),
[
]
[
]
[
]
Ai - FiC
0
0
I
-Fi
Ai11 =
,
Bi1 =
,
Di1 =
,
FiC
Ai
Bi
0
Fi
97
Ai12 = 0, Ai22 = I, Ai21 = [-CFiC - CA],
Bi2 = -CBi, Di2 = [0 - CFi].
Система (2.9) относится к классу дискретных повторяющихся процес-
сов, представляющих собой одну из разновидностей так называемых 2D-си-
стем [28]. Особенность таких систем состоит в том, что они разрешены отно-
сительно частных приращений переменных состояния, в случае дискретного
времени, или относительно частных производных переменных состояния, в
случае непрерывного времени, по каждому из независимых аргументов, и
стандартные методы классической и современной теории управления стано-
вятся неприменимыми для их исследования. В последние годы авторы систе-
матически развивали теорию устойчивости, диссипативности и стабилизации
таких систем на основе свойств дивергенции векторных функций Ляпуно-
ва [20, 21, 29-32]. Этот подход, названный дивергентным методом векторных
функций Ляпунова, далее используется для решения поставленной задачи.
3. Устойчивость и диссипативность
Корректирующую поправку будем строить как управление с обратной свя-
зью для системы (2.9) относительно приращений. Развиваемый далее подход
открывает возможность искать это управление в достаточно общем виде
(3.1)
νk+1(p) = ϕ(ηk+1(p), êk
(p)), ϕ(0, 0) = 0.
В частности, как показано в [19, 20], такая форма корректирующей поправки
расширяет возможности синтеза в случае линейных систем без переключе-
ний.
Определение 1. Дискретный повторяющийся процесс (2.9), (3.1) на-
зывается устойчивым вдоль повторений по второму моменту, если
(3.2)
lim
E[||ηk(p)||2 + ||êk(p)||2
] ≤ Γ < ∞,
k+p→∞
где Γ не зависит от T .
Дальнейший анализ основан на векторной функции Ляпунова
[
]
V1(ξ)
(3.3)
Vi(ξ,ǫ) =
,
ξ∈R2nx, ǫ∈Rny
,
i∈N,
V2i(ǫ)
где
V1(ξ) > 0, ξ = 0, V2i(ǫ) > 0, ǫ = 0, V1(0) = 0, V2i(0) = 0, i ∈ N.
Стохастический аналог дивергенции этой функции вдоль траекторий си-
стемы (2.9), (3.1) определяется выражением
DVi(ξ,ǫ) = E[V1(ηk+1(p + 1))| ηk+1(p) = ξ, êk(t) = ǫ] - V1(ξ) +
(3.4)
+ E[V2i(êk+1(p))| ηk+1(p) = ξ, êk(p) = ǫ] - V2i
(ǫ), i ∈ N .
98
Этот оператор представляет сумму средних частных приращений по пере-
менным k и p функции Vi при условии, что аргументы на предыдущем шаге
принимают фиксированные значения ξ и ǫ, и, таким образом, является есте-
ственным обобщением дивергенции на рассматриваемый случай стохастиче-
ской системы.
Обозначим число переключений сигнала σ на интервале (ks, kf ) че-
рез Nσ(kf , ks) и, следуя общим принципам теории систем с переключени-
ем [23-25], введем в рассмотрение среднее время ожидания в соответствии со
следующим определением.
Определение 2. Положительное число κa ∈ Z+ называется средним
временем ожидания для сигнала переключения относительно повторений σ,
если для некоторого N0 ≥ 0
kf - ks
(3.5)
Nσ(kf ,ks) ≤ N0 +
,
kf ≥ ks
≥ 0.
κa
Неравенство (3.5) означает, что в среднем число шагов между любыми дву-
мя последовательными переключениями на рассматриваемом интервале не
меньше κa.
Теорема 1. Eсли существует векторная функция (3.3) и положитель-
ные скаляры c1, c2, c3 и γ, такие что
(3.6)
c1||ξ||2 ≤ V1(ξ) ≤ c2||ξ||2,
(3.7)
c1||ǫ||2 ≤ V2i(ǫ) ≤ c2||ǫ||2,
(3.8)
DVi(ξ,ǫ) ≤ γ - c3(||ξ||2 + ||ǫ||2
),
i∈N,
то дискретный повторяющийся процесс (2.9), (3.1) является устойчивым
вдоль повторений по второму моменту для любого сигнала переключения
относительно повторений σ со средним временем ожидания
)(
(
))-1
(c1
c3
(3.9)
κa > ln
ln
1-
c2
c1
и произвольным N0.
Доказательство. Рассмотрим интервал (0,kf) и обозначим через Nσ =
= Nσ(kf,0) число переключений на этом интервале. Обозначим
V1(ηk+1(p)) = E[V1(ηk+1(p))],
V2i(êk(p)) = E[V2i(êk(p))].
Применяя к обеим частям (3.8) оператор математического ожидания и учи-
тывая (3.4), получим, что
V1(ηk+1(p + 1))
V2σ(k+1)(êk+1(p)) ≤
(
)
(3.10)
c3
≤
1-
V1(ηk+1(p)
V2σ(k)(êk(p)) + γ.
c2
99
Левая часть (3.10) является положительно определенной и поскольку c2 > 0
и c3 > 0, из (3.10) следует, что 0 < 1 - c3c2 < 1. Обозначим λ = 1 - c3 и пере-2
пишем (3.10) в виде
V1(ηk+1(p + 1)) ≤
(3.11)
≤
V1(ηk+1(p)) +
V2σ(k)(êk(p))
V2σ(k+1)(êk+1(p)) + γ.
Решая неравенство (3.11) относительн
V1(ηk+1(p)), имеем
V1(ηk+1(p))
V1(ηk+1(0))λp +
∑[
]
+
V2σ(k)(êk(h))
V2σ(k+1)(êk+1(h)) λp-1-h +
(3.12)
h=0
∑
+γ λp-1-q.
q=0
Обозначим
∑
Hk(p) =
V2,σ(k)(êk(p))λp-1-q,
q=0
тогда из (3.12) следует, что
Hk+1(p) ≤ λHk,σ(k)(p) + λp
V1(ηk+1(0)) -
(3.13)
∑
-
V1(ηk+1(p)) + γ
λp-1-q.
q=0
Пусть на повторении kn происходит переключение с активной системы i на
активную систему j. Тогда в соответствии с (3.7)
(3.14)
V2j(y) ≤ µV2i
(y), i, j ∈ N ,
где
c2
µ=
≥ 1.
c1
Решая неравенство (3.13) и учитывая (3.14), получим
Hk(t) ≤ µNσ λkH0,σ(0)(p) +
∑
[
]
+ λk-1-n λ
V1(ηn+1(0))
V1(ηn+1(p))
+
n=0
∑
∑
+γ
λp-1-q λk-1-n,
n=0
q=0
100
откуда
∑
∑
λk-1-n
V1(ηn+1(p)) +
λp-1-h
V2σ(k)(êk(h)) ≤
n=0
h=0
∑
∑
≤µNσ λk-1-nV1(ηn+1(p))+ λp-1-
V2σ(k)(êk(h)) ≤
n=0
h=0
(3.15)
(
)
∑
∑
≤µNσ λp λk-1-
V1(ηn+1
(0)) + λk
λp-1-h
V2,σ(0)(ê0(h))
+
n=0
h=0
∑
∑
+γ
λp-1-qλk-1-n.
n=0
q=0
Из неравенства (3.15) с учетом (3.6), (3.7) и того, что ηn+1(0)) = 0, следует,
что
Nσ
∑
µ
γ
(3.16)
E[|ηk(p))|2] ≤
λk
λp-1-q
V2(ê0(q)) +
c1
c1(1 - λ)2
q=0
и
Nσ
∑
µ
γ
(3.17)
E[|êk(p - 1))|2] ≤
λk
λp-1-q
V2(ê0(q)) +
c1
c1(1 - λ)2
q=0
Поскольку величина ê0(p) = yref (p) - C x0(p) ограничена для всех 0 ≤ p ≤
≤ T - 1, то правые части (3.16) и (3.17) будут ограничены тогда и только
тогда, когда µNσ λk < 1. Отсюда с учетом (3.5) следует (3.9). Это означает,
что повторяющийся процесс (2.9), (3.1) является устойчивым вдоль повто-
рений по второму моменту для любого сигнала переключения относительно
повторений σ со средним временем ожидания, удовлетворяющим (3.9), и про-
извольным N0. Теорема 1 доказана.
Из доказательства теоремы вытекает следующий результат.
Следствие. Дискретный повторяющийся процесс (2.9), (3.1) являет-
ся устойчивым вдоль повторений по второму моменту для произвольного
сигнала переключения относительно повторений σ, если существует век-
торная функция
(3.18)
V (ξ, ǫ) = [V1(ξ) V2(ǫ)]T
и положительные скаляры c1, c2, c3, и γ, такие что
c1||ξ||2 ≤ V1(ξ) ≤ c2||ξ||2,
(3.19)
c1||ǫ||2 ≤ V2(ǫ) ≤ c2||ǫ||2,
DV (ξ,ǫ) ≤ γ - c3(||ξ||2 + ||ǫ||2).
101
Сформируем для системы (2.9) дополнительный вектор выхода zk+1(p) ∈
∈ Rnz, определяемый выражением
(3.20)
zk+1(p) = C1ηk+1(p) + C2êk(p) + C3vk+1
(p),
где C1, C2 и C3 - постоянные матрицы согласованных размеров. Следуя [20],
введем определение диссипативности вдоль повторений.
Определение 3. Дискретный повторяющий процесс (2.9) называет-
ся диссипативным вдоль повторений по второму моменту относитель-
но входной переменной νk+1(t) и выходной переменной zk+1(t), определенной
в (3.20), если существуют векторная функция вида (3.3), скалярная функ-
ция Si(νk+1(p), zk+1(p)), i ∈ N , положительные скаляры c1, c2, c3 и γ, удовле-
творяющие условиям (3.6), (3.7) и
(3.21)
DVi(ξ,ǫ) ≤ Si(νk+1(p),zk+1(p)) + γ - c3(||ξ||2 + ||ǫ||2
),
i∈N.
4. Синтез управления
4.1. Синтез нелинейного управления с переключениями
В теории диссипативности по Виллемсу функции Si и Vi называются функ-
цией запаса и функцией накопления. Нетрудно видеть, что если при некото-
ром выборе z корректирущая поправка (3.1) удовлетворяет условию
Si(zk+1(p),νk+1(p)) ≤ 0, i ∈ N,
то система (2.9), (3.1) в соответствии с теоремой 1 будет устойчивой вдоль
повторений по второму моменту для любого сигнала переключения относи-
тельно повторений σ со средним временем ожидания, удовлетворяющим (3.9)
и произвольным N0. Таким образом, задача сводится к нахождению стаби-
лизирующей тройки {V, z, ν}.
Обозначим
[
]
[
]
[
]
ηk+1(p)
Ai11
Ai12
Bi1
ζk+1(p) =
,
Ai =
,
Bi =
,
i∈N,
êk(p)
Ai21
Ai22
Bi2
и определим блочно-диагональную матрицу Pi = diag[P1 P2i] ≻ 0 как решение
неравенства Риккати
(4.1)
ATiPiA¯ - (1 - σ)Pi
ATiPi Bi[BTiPi Bi + R]-1 BTiPiA¯i
+ Q ≼ 0, i ∈ N,
где 0 < δ < 1 - положительный скаляр, Q ≻ 0 и R ≻ 0 - весовые матрицы.
Нетрудно видеть, что если система линейных матричных неравенств
(1 - δ)Xi
XA¯T
Xi
(4.2)
AiXi Xi +BiR-1 BTi
0
≽ 0, Xi ≻ 0, i ∈ N,
Xi
0
Q-1
102
разрешима относительно
Xi = diag[X1 X2i] ≻ 0,
то
Pi = X-1i, i ∈ N.
Следующая теорема 2 предлагает одно из возможных множеств стабили-
зирующих троек.
Теорема 2. Дискретный повторяющийся процесс (2.9) является дисси-
пативным вдоль повторений по второму моменту с функцией запаса
Si(νk+1(p),zk+1(p)) = zTk+1(p)(BTiPi Bi + R)-1zk+1(p) +
(4.3)
+ 2zk+1(p)Tνk+1(p) + νk+1(p)T[ BTi Pi Bi + R]νk+1(p), i ∈ N ,
относительно входной переменной νk+1(t) и выходной переменной
(4.4)
zk+1(p) =BTiPiA¯iζk+1
(p), i ∈ N ,
где Pi = X-1i, a Xi = diag[X1 X2i] ≻ 0, i ∈ N , является решением (4.1). Мно-
жество корректирующих поправок (3.1), обеспечивающих устойчивость
вдоль повторений по второму моменту системы (2.9), (3.1), определяет-
ся соотношением
(4.5)
νk+1(p) = -[BTiPi Bi + R]-1 BTi
AiΘi(ζk+1(p))ζk+1
(p), i ∈ N ,
где Θ(ζ) - симметричная матричная функция, удовлетворяющая соотно-
шению
Mi -MiΘi(ζ)-Θi(ζ)Mi -Θi(ζ)Mi +Θi(ζ)MiΘi(ζ)-Q-(δ-µ)Pi ≼0,
(4.6)
i∈N,
для всех ζ ∈ R2nx+ny , где Mi
ATiPi Bi[BTiPi Bi +R]-1 BTiPiA¯i, 0<µ<σ, i∈N.
Доказательство. Выберем компоненты функции (3.3) в виде квадра-
тичных форм
V1(ξ) = ξTP1ξ, V2(ǫ) = ǫT P2iǫ,
где P1 ≻ 0 и P2i ≻ 0 - соответствующие диагональные блоки матрицы Pi,
являющейся решением (4.1). Обозначи
ξ = [ξT ǫT]T. Последовательно оце-
нивая дивергенцию (3.3) вдоль траекторий (2.9), получим
DVi(ξ,ǫ) =
(
)
[
]-1
BT
BT
=
ξT
ATiPiA¯i - (1 - δ)Pi
ATiPi Bi
Pi Bi + R
PiA¯i + Q
ξ+
i
i
[
BT
]-1 BT
ξTA¯TiPi Bi
Pi Bi + R
PiA¯i
ξ-
i
i
(4.7)
ξT (Q + δPi
ξ+
ξTA¯TiPi Biνk+1(p) +
[
]
+ νk+1(p)T BTi Pi Biνk+1(p) + 2 tr[P1S1i] + tr[P2iS2i] ≤
≤
ξTA¯TiPi Bi[BTiPi Bi + R]-1 BTiPiA
ξ+
ξTA¯TiPi Bνk+1(p) +
[
]
+νk+1(p)T BTiPi Biνk+1(p)
ξT(Q + δPi
ξ + 2 tr[P1S1i] + tr[P2iS2i] ,
103
где
[
]
S
v +FiSw
-FiSwFTi
i
S1i =
,
S2i = CFiSwFTiCT.
−FiSwFTi
FiSwFiT
Из (4.7) следует, что система (2.9) является диссипативной вдоль повторений
по второму моменту относительно входа νk+1(p) и выхода (4.4) с функцией
запаса (4.3) и
{
}
γ = max
2[tr[P1S1i] + tr[P2iS2i]] ,
c3 = µ min{λmin(Pi)}.
i∈N
i∈N
Для корректирующей поправки в виде (4.5) из (4.7) с учетом (4.6) и принятых
обозначений следует, что
(
)
DVi(η, ê) ≤ -c3
||ξ||2 + ||ǫ||2
+ γ.
Следовательно, в соответствии с теоремой 1, система (4.5), (2.9) устойчива
вдоль повторений по второму моменту для любого сигнала переключения
относительно повторений σ со средним временем ожидания, удовлетворяю-
щим (3.9) и произвольным N0. Постоянные c1 и c2 в (3.9) определятся выра-
жениями
{
}
{
}
c1 = min λmin(P1),min{λmin(P2i)}
,
c2 = max λmax(P1),max{λmax(P2i)}
i∈N
i∈N
Теорема 2 доказана.
Замечание 2. Посколькуприращениеошибкиоценивани
ξk+1(p) недо-
ступно для формирования корректирующей поправки, матрица Θi всегда
должна иметь вид Θi(ζ) = diag[0nx Θi1(ζ)]. В простейшем случае матрица Θi1
может быть выбрана не зависящей от ζ, и тогда, после нахождения матри-
цы Pi, условие (4.6) сводится к системе линейных матричных неравенств,
при этом теорема 1 дает линейную корректирующую поправку. В общем слу-
чае Θi(ζ) зависит от изменения ошибки относительно повторений и можно
пытаться уменьшать значения коэффициентов корректирующих поправок
после достижения требуемой точности и, наоборот, увеличивать эти коэф-
фициенты, когда ошибка велика, другими словами, вводить адаптацию к ве-
личине ошибки. Такой подход позволит найти разумный компромисс между
скоростью обучения и энергозатратами на управление. Наиболее просто это
можно сделать за счет кусочно-постоянного изменения Θ в зависимости от
достигнутой точности. Такое решение для систем без переключений рассмот-
рено в [20].
4.2. Синтез линейного управления без переключений
В ряде случаев представляет интерес построить управление без переклю-
чений. Здесь более эффективным представляется другой подход к реше-
нию. Рассмотрим функцию Ляпунова (3.18) с компонентами V1(ξ) = ξTP1ξ,
104
V2(ǫ) = ǫTP2ǫ, где P1 ≻ 0 и P2 ≻ 0 - постоянные матрицы. Закон коррекции
будем искать в виде линейной обратной связи по приращениям доступных
для измерения переменных и по ошибке:
(4.8)
vk+1(p) = K1
ξk+1(p) + K2êk(p) = KHζk+1(p),
где K = [K1 K2], H = [0 Inx+ny ]. Вычисляя дивергенцию (3.18) вдоль траек-
торий (2.9), (4.8), получим
(4.9)
DV
ξT
ATci
Aci - P
ξ + 2[tr[P1S1i] + tr[P2S2i
]],
i∈N,
где
P = diag[P1 P2],
Ai - FiC
0
0
Aci =
FiC
Ai + BiK1
BiK2
, i ∈ N.
−CFiC
-C(Ai + BiK1) I - CBiK2
Предположим, что матрицы P ≻ 0 и K удовлетворяют системе неравенств
(4.10)
Ai +BiKH)TP
Ai
BiKH) - Pi + Q + HTKT
RKH ≼ 0, i ∈ N,
где Q ≻ 0 и R ≻ 0 - матрицы, аналогичные весовым матрицам в теории
линейно-квадратичного регулятора. Поскольку выполняется (4.10), то вы-
полняются условия следствия теоремы 1 с параметрами
{
[
]}
(
)
γ = max
2
tr[P1S1i] + tr[P2S2i]
,
c3 = λmin
Q+HTKTRKH
i∈N
и, таким образом, система (2.9), (4.8) является устойчивой вдоль повторений
по второму моменту для произвольного сигнала переключения относительно
повторений σ. Неравенства (4.10) с помощью известной леммы о дополнении
Шура сводятся к линейным матричным неравенствам и уравнению относи-
тельно переменных X = diag[P-11 P-12] , Y , и Z:
X
AiX +BiY H)T X (Y H)T
AiX +BiY H
X
0
0
≽ 0,
(4.11)
X
0
Q-1
0
YH
0
0
R-1
X ≻ 0, HX = ZH, i ∈ N.
Если неравенства и уравнение (4.11) совместны, то K = [K1 K2] = Y Z-1, по-
скольку в силу структуры матрицы H матрица Z является невырожденной.
105
5. Пример
Рассмотрим модель манипулятора c одним гибким звеном [33], функцио-
нирующего в повторяющемся режиме с постоянным периодом повторения в
условиях действия внешних возмущений и шумов измерений. Динамика дви-
жения манипулятора в пространстве состояний описывается уравнениями
xk(t) = A0xk(t) + B0(uk(t) + µk(t)),
0≤t≤Tf,
(5.1)
yk(t) = Cxk(t) + ωk(t), k = 0,1,2,... ,
[
]T
где на k-м повторении xk(t) = θk(t) αk(t)
θk(t)
α(t)k
, θk(t) - угол пово-
рота сервопривода, αk(t) - угол отклонения гибкого звена,
0
0
1
0
0
0
0
1
Ks
Beq
0
-
0
A0 =
,
Jeq
Jeq
Ks(Jl + Jeq)
Beq
0
-
0
JlJeq
Jeq
0
0
1
B0 =
,
C = [1
0
0
0] ,
Jeq
1
-
Jeq
Beq - коэффициент вязкого трения сервопривода, Ks - жесткость гибкого
звена, Jl - момент инерции гибкого звена относительно центра масс, Jeq -
момент инерции сервопривода, µk(t) и ωk(t) - независимые последователь-
ности непрерывных гауссовских шумов с постоянными интенсивностями Qn
и Rn. Движение гибкого звена происходит в горизонтальной плоскости. Для
построения и анализа управления с итеративным обучением перейдем к эк-
вивалентной дискретной модели с постоянным периодом Ts
(5.2)
xk(p + 1) = Axk(p) + Buk(p) + vk
(p),
ywk(p) = Cxk(p) + wk(p), p = 0,1,... ,NTf , k = 0,1,2,... ,
∫Ts
где A = exp(A0Ts), B =
exp(A0τ)B0dτ, p - номер периода дискретности,
0
NTf - число периодов дискретности на отрезке [0, Tf], vk(p) и wk(p) - незави-
симые последовательности гауссовских дискретных белых шумов с ковариа-
циями
∫Ts
(5.3)
Sv = exp(A0τ)B0QnBT0 exp(AT0 τ)dτ, Sw = Rn/Ts.
0
106
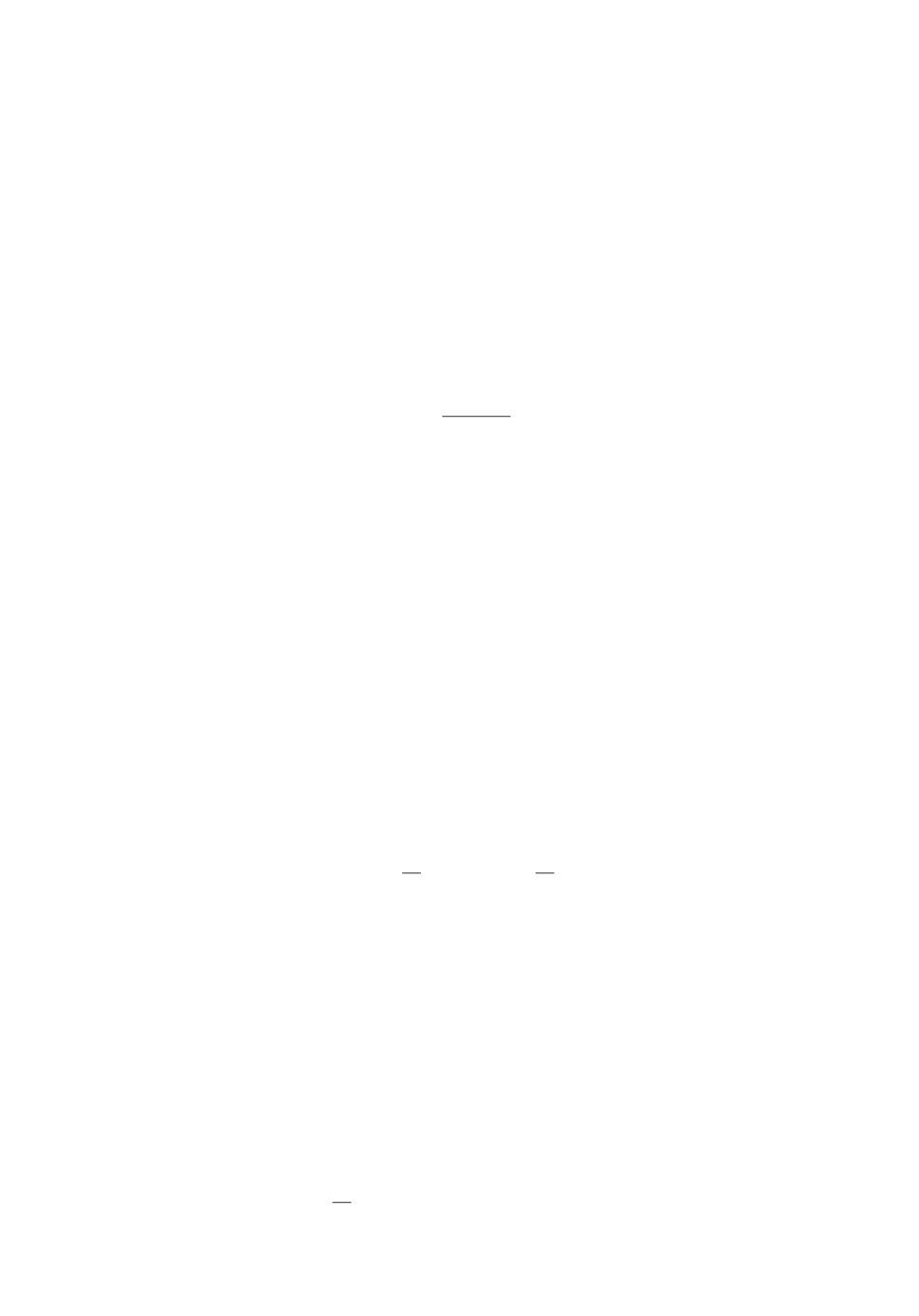
yref, рад
1,6
1,4
1,2
1,0
0,8
0,6
0,4
0,2
0
50
100
150
200
250
300
p
Рис. 1. Желаемая траектория изменения угла поворота вала сервомотора.
Задача состоит в нахождении алгоритма управления с итеративным обу-
чением, при котором выходная переменная yk(p) = θk(p) воспроизводила бы
желаемую траекторию yref (t) с заданной точностью e∗. Для формирования
управления доступен только угол θk(p), который в соответствии с (5.2) изме-
ряется с шумами. Точность будем оценивать по выборочному среднеквадра-
тическому отклонению
v
u
u
N
u
1
∑
(5.4)
E(k) =
√
||êk(p)||2.
NTf
p=0
Для расчетов и моделирования были приняты следующие номинальные
значения параметров из [33]: Beq = 0,004 Н·м/(рад/с), Ks = 1,3 Н·м/рад, Jl =
= 0,0038 кг·м2, Jeq = 2,08 · 10-3 кг·м2. Продолжительность цикла повторе-
ния Tf составляет 3 c, требуемая точность e∗ = 1град. = 0,0175 рад., постоян-
ные интенсивности шумов имеют величины Qn = 0,16 · 10-4 и Rn = 0,2 · 10-5.
Желаемая траектория изменения выходной переменной описывается урав-
нением
2
πt
πt3
yref(t) =
-
,
t ∈ [0;T],
6
27
и представлена на рис. 1
При начале работы манипулятора несколько первых повторений прохо-
дят без нагрузки для предварительной настройки, при этом значения па-
раметров соответствуют номинальным. После трех повторений манипулятор
нагружается, при этом изменяется значение Jl, которое становится равным
0,1038кг · м2. Исходя из физического смысла переменных состояния зададим
весовые матрицы
Q = diag[10-4
10-3
10-2
10-4
10-4
10-3
10-2
10-4
106], R = 1
107
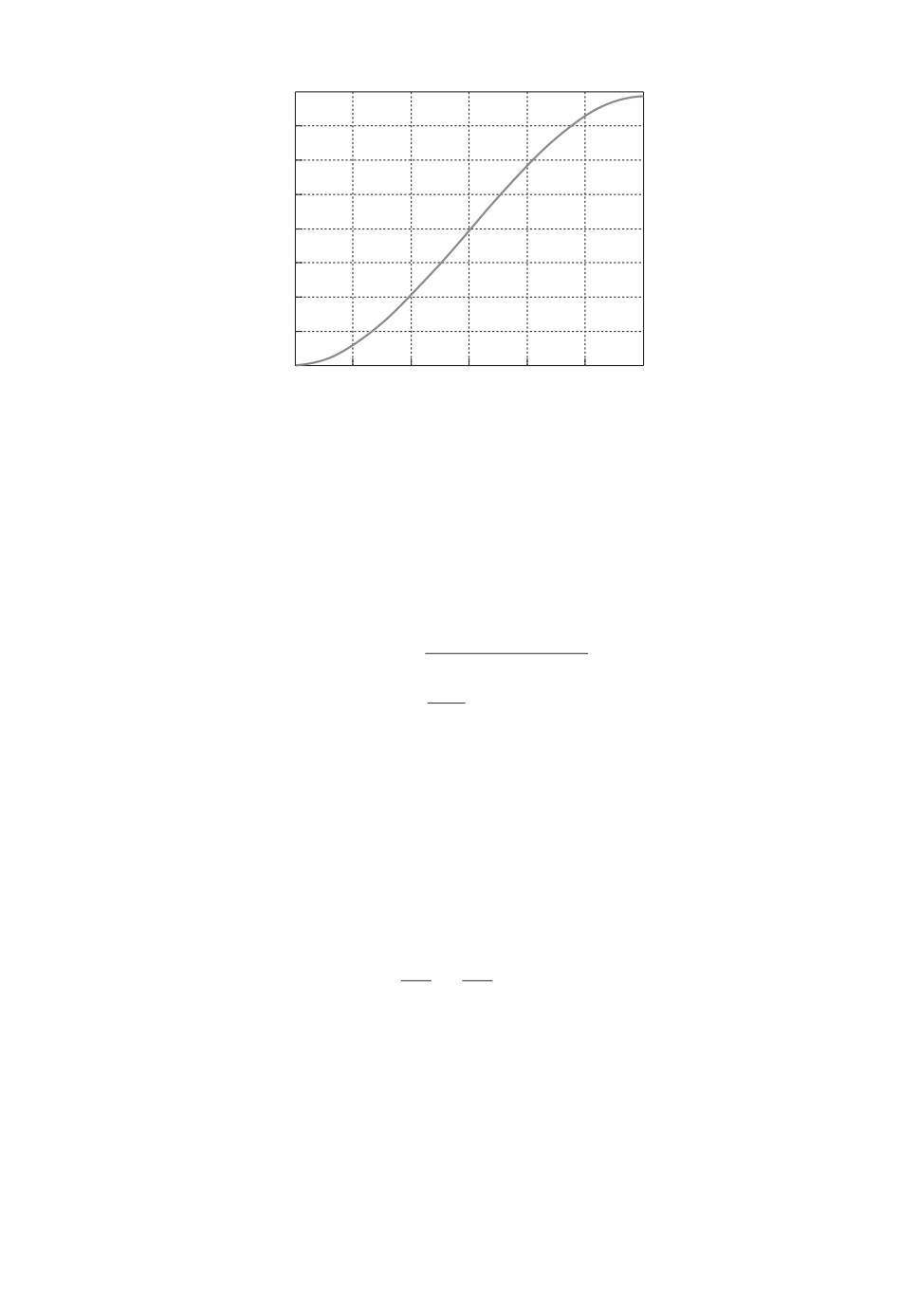
Е, рад
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
X: 3
0,1
Y: 0,01656
0
1
2
3
4
5
6
7
8
9
10
k
Рис. 2. Изменение среднеквадратической ошибки в зависимости от числа по-
вторений для управления с переключением.
Е, рад
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
X: 6
0,1
Y: 0,01572
0
1
2
3
4
5
6
7
8
9
10
k
Рис. 3. Изменение среднеквадратической ошибки в зависимости от числа по-
вторений для управления без переключения.
и примем Ts = 0,01 c. Рассматривая скачкообразное изменение нагрузки на
манипулятор как переключение, воспользуется результатами подраздела 4.2,
которые удобны для сравнительного анализа. Обозначим матрицы ненагру-
женного манипулятора через A1, B1 и матрицы нагруженного манипулято-
ра A2, B2. Переключаемый алгоритм управления с итеративным обучени-
ем имеет вид
xk (p) = Aixk (p - 1) + Biuk (p - 1) + Fi (yk (p - 1) - Cxk (p - 1)),
{
1, если k < 3,
i=
2, если k ≥ 3,
108
{
F1 = [0,4321
- 0,2936
6,1515
- 4,0246]T, если k < 3,
Fi =
F2 = [0,3950
- 0,3667
4,5955
- 4,4811]T, если k ≥ 3,
uk (p) = uk-1 (p) + K1 (xk (p) - xk-1 (p)) + K2i (yref (p) - yk-1 (p + 1)) ,
K1 = [-29,5324
6,1375
- 1,1415
- 0,7588],
{
27,8263, если k < 3,
K2i =
26,6316, если k ≥ 3.
При использовании алгоритма без переключений
uk(p) = uk-1(p) + K1(xk(p) - xk-1(p)) + K2(yref(p) - yk-1(p + 1)),
K1 = [-21,1783
14,6783
- 2,0471
- 1,6679], K2 = 20,8358.
На рис. 2, 3 показано изменение среднеквадратической ошибки в зависи-
мости от числа повторений для управления с переключением и без переклю-
чения соответственно.
Анализ полученных зависимостей показывает, что в случае управления с
переключением требуемая точность достигается сразу же после настроечных
повторений, в то время как в случае управления без переключений для дости-
жения нужной точности требуются дополнительные шаги в рабочем режиме,
что, очевидно, нежелательно.
6. Заключение
В данной статье предложены методы синтеза управления с итеративным
обучением для стохастических систем с переключениями на основе теории
2D-систем в форме дискретных повторяющихся процессов. Приведенный при-
мер показывает, что когда переключения наблюдаемы, управление с пере-
ключением поволяет ускорить сходимость процесса обучения. Дальнейшего
исследования требует вопрос выбора нелинейной функции Θi(ζ) в методе син-
теза на основе диссипативности (теорема 2 и замечание 2). Открытым остал-
ся вопрос о влиянии динамики фильтра Калмана на скорость сходимости
процесса обучения и точность. Значительный интерес представляют сетевые
задачи управления с итеративным обучением, где переключения являются
естественной моделью изменений информационной структуры сети. Комби-
нация управления с итеративным обучением и управления с обратной связью
также представляет интересную задачу для дальнейших исследований.
СПИСОК ЛИТЕРАТУРЫ
1. Garden M. Learning Сontrol of Actuators in Control Systems. U.S. Patent 3555252,
1971.
2. Uchiyama M. Formulation of High-Speed Motion Pattern of a Mechanical Arm by
Trial // Trans. SICE (Soc. Instrum. Contr. Eng.). 1978. V. 14. No. 6. P. 706-712.
3. Arimoto S., Kawamura S., Miyazaki F. Bettering Operation of Robots by Learn-
ing // J. Robot. Syst. 1984. V. 1. P. 123-140.
109
4.
Arimoto S., Kawamura S., Miyazaki F. Bettering Operation of Dynamic Systems by
Learning: A New Control Theory for Servomechanism or Mechatronic Systems //
Proc. 23rd Conf. Decicion Control. Las Vegas. 1984. P. 1064-1069.
5.
Craig J.J. Adaptive Control of Manipulators through Repeated Trials // Proc. Amer.
Control Conf. 1984. P. 1566-1573.
6.
Casalino G., Bartolini G. A Learning Procedure for the Control of Movements of
Robotic Manipulators // Proc. IASTED Symp. Robot. Autom. 1984. P. 108-111.
7.
Xu J.-X., Tan Y. Linear and Nonlinear Iterative Learning Control. Lecture Notes in
Control and Information Sciences. N.Y.: Springer, 2003.
8.
Ahn H.-S., Moore K.L., Chen Y.Q. Iterative Learning Control. Robustness and
Monotonic Convergence for Interval Systems. London: Springer-Verlag, 2007.
9.
Bristow D.A., Tharayil M., Alleyne A.G. A Survey of Iterative Learning Control //
IEEE Control Syst. Mag. 2006. V. 23. No. 3. P. 96-114.
10.
Ahn H.-S., Chen Y.Q., Moore K.L. Iterative Learning Control: Brief Survey and Cat-
egorization // IEEE Trans. Syst. Man. Cybernet. Part C: Applications and Reviews.
2007. V. 37. No. 6. P. 1099-1121.
11.
Shen D., Wang Y. Survey on Stochastic Iterative Learning Control // J. Process
Control. 2014. V. 24. P. 64-77.
12.
Shen D. A Technical Overview of Recent Progresses on Stochastic Iterative Learning
Control // UST. 2018. V. 6. No. 3. P. 147-164.
13.
Saab S.S. A Discrete-Time Stochastic Learning Control Algorithm // IEEE Trans.
Autom. Control. 2001. V. 46. No. 6. P. 877-887.
14.
Saab S.S. On a Discrete-Time Stochastic Learning Control Algorithm // IEEE Trans.
Autom. Control. 2001. V. 46. No. 8. P. 1333-1336.
15.
Saab S.S. Stochastic P-type/D-type Iterative Learning Control Algorithms // Int.
J. Control. 2003. V. 76. No. 2. P. 139-148.
16.
Saab S.S. A Stochastic Iterative Learning Control Algorithm with Application to an
Induction Motor // Int. J. Control. 2004. V. 77. No. 2. P. 144-163.
17.
Saab S.S. Optimal Selection of the Forgetting Matrix into an Iterative Learning Con-
trol Algorithm // IEEE Trans. Autom. Control. 2005. V. 50. No. 12. P. 2039-2043.
18.
Saab S.S. Optimality of First-Order ILC among Higher Order ILC // IEEE Trans.
Autom. Control. 2006. V. 51. No. 8. P. 1332-1336.
19.
Pakshin P., Emelianova J., Galkowski K., Rogers E. Iterative Learning Control De-
sign for Discrete Stochastic Linear Systems // Proc. 18th Eur. Control Conf. Napoli,
Italy. 2019. P. 3776-3771.
20.
Pakshin P., Emelianova J., Rogers E., Galkowski K. Repetitive Process Based
Stochastic Iterative Learning Control Design for Linear Dynamics // Syst. Control
21.
Пакшин П.В., Копосов А.С., Емельянова Ю.П. Управление с итеративным обу-
чением мультиагентной системой в условиях случайных возмущений // АиТ.
2020. № 3. С. 132-156.
Pakshin P.V., Koposov A.S., Emelianova J.P. Iterative Learning Control of a Multi-
agent System under Random Perturbations // Autom. Remote Control. 2020. V. 81.
No. 3. P. 483-502.
22.
Oh S-K, Lee J.M. Stochastic Iterative Learning Control for Discrete Linear Time-
Invariant System with Batch-Varying Reference Trajectories // J. Process Control.
2015. V. 36. P. 64-78.
23.
Liberzon D. Switching in Systems and Control. Boston, MA: Birkhäuser, 2003.
110
24.
Shorten R., Wirth F., Mason O., Wulff K., King C. Stability Criteria for Switched
and Hybrid Systems // SIAM Rev. 2007. V. 49. P. 545-592.
25.
Lin H., Antsaklis P.J. Stability and Stabilizability of Switched Linear Systems: A
Survey of Recent Results // IEEE Trans. Autom. Control. 2009. V. 54. P. 308-321.
26.
Sun Z., Ge S.S. Stability Theory of Switched Dynamical Systems. London: Springer-
Verlag, 2011.
27.
Alwan M.S, Liu X. Theory of Hybrid Systems:Deterministic and Stochastic. Beijing:
Springer Nature Singapore Pte Ltd. and Higher Education Press, 2018.
28.
Rogers E., Galkowski K., Owens D.H. Control Systems Theory and Applications
for Linear Repetitive Processes / Lect. Notes Control Inform. Sci. Berlin: Springer-
Verlag, 2007. V. 349.
29.
Pakshin P., Emelianova J., Emelianov M., Galkowski K., Rogers E. Dissipivity and
Stabilization of Nonlinear Repetitive Processes // Syst. Control Lett. 2016. V. 91.
P. 14-20.
30.
Пакшин П.В., Емельянова Ю.П., Емельянов М.А., Галковский К., Роджерс Э.
Стохастическая устойчивость некоторых классов 2D-систем // АиТ. 2018. № 1.
С. 113-129.
Pakshin P., Emelianova J., Emelianov M., Galkowski K., Rogers E. Stochastic Sta-
bility of Some Classes of Nonlinear 2D Systems // Autom. Remote Control. 2018.
V. 79. No. 1. P. 89-102.
31.
Pakshin P., Emelianova J., Galkowski K., Rogers E. Stabilization of Two-
Dimensional Nonlinear Systems Described by Fornasini-Marchesini and Roesser
models //SIAM J. Control Optim. 2018. V. 56. P. 3848-3866.
32.
Pakshin P., Emelianova J., Emelianov M., Galkowski K., Rogers E. Passivity Based
Stabilization of Repetitive Processes and Iterative Learning Control Design // Syst.
Control Lett. 2018. V. 122. P. 101-108.
33.
Apkarian J., Karam P., Levis M. Workbook on Flexible Link Experiment for Mat-
lab/Simulink Users. Quanser, 2011.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 02.03.2020
После доработки 27.05.2020
Принята к публикации 09.07.2020
111