Автоматика и телемеханика, № 12, 2020
Тематический выпуск1
© 2020 г. В.М. АЗАНОВ, канд. физ.-мат. наук (azanov59@gmail.com)
(Московский авиационный институт)
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ДИСКРЕТНОЙ СТОХАСТИЧЕСКОЙ
СИСТЕМОЙ С ВЕРОЯТНОСТНЫМ КРИТЕРИЕМ И
НЕФИКСИРОВАННЫМ ВРЕМЕНЕМ ОКОНЧАНИЯ2
Рассматривается задача оптимального управления дискретной стоха-
стической системой с критерием в форме вероятности первого достиже-
ния границ заданной области. Формулируются и доказываются достаточ-
ные условия оптимальности в форме метода динамического программи-
рования. С помощью поверхностей уровней 1 и 0 функции Беллмана на-
ходятся двусторонние оценки функции правой части уравнения метода
динамического программирования, функции Беллмана и функции опти-
мального значения вероятностного критерия, и предлагается способ по-
строения субоптимального управления. Формулируются условия эквива-
лентности с задачей оптимального управления с вероятностным терми-
нальным критерием. Рассматривается пример.
Ключевые слова: дискретные системы, стохастическое оптимальное
управление, вероятностный критерий, метод динамического программи-
рования, функция Беллмана.
DOI: 10.31857/S0005231020120016
1. Введение
Одним из важнейших направлений исследований в области стохастическо-
го оптимального управления являются задачи с нефиксированным моментом
остановки. Среди них отдельно выделяют задачу стохастического быстродей-
ствия [1, 2], задачу с бесконечным горизонтом управления [3-6], задачу оп-
тимизации времени пребывания системы в заданной трубке траекторий [1, 7]
и задачу оптимизации момента первого достижения границ заднной обла-
сти [1, 8, 9]. Модели управления с нефиксированным моментом остановки
имеют широкое применение в авиационной [10], экономической [11], биоло-
гической, робототехнической и энергетической [1] областях. В случае систем
с непрерывным временем известность получили методы, основанные на до-
статочных условиях оптимальности в форме метода динамического програм-
мирования, позволяющие искать оптимальные стратегии в классе позицион-
ных. Интересно, что использование именно вероятностного критерия [1, 7]
1 Статьи данной рубрики являются окончанием тематического выпуска, посвященного
В.С. Пугачеву (№ 11, 2020).
2 Работа выполнена при поддержке Российского фонда фундаментальных исследований
(проект № 18-08-00595).
3
приводит к конструктивной форме постановки задач управления с нефикси-
рованным временем, для которой удается записать уравнение Беллмана. Тем
не менее до сих пор существует ряд принципиальных проблем численного
поиска оптимального управления, а аналитические решения получены лишь
для ряда модельных задач [1]. Это обстоятельство связано со следующими
трудностями: решение уравнения Беллмана может быть не единственным;
даже если решение уравнения Беллмана существует в классе гладких функ-
ций, оно может быть недопустимым (например, потому что при нем может не
существовать сильного решения уравнения стохастической системы в форме
Ито); в классе допустимых управлений не всегда существует такое, при кото-
ром достигается точная грань критерия; уравнение Беллмана связано с так
называемым “проклятьем размерности”.
В случае дискретного времени качественная теория подобных задач изло-
жена в [3]. Известны решения отдельных задач экономики [11] и модельных
примеров [9]. В [9] была рассмотрена задача оптимизации вероятности пер-
вого достижения окрестности нуля траекториями линейной стохастической
системы в канонической форме управляемости Бруновского. С помощью ее
сведения к задаче с вероятностным терминальным критерием и дальнейшим
использованием метода динамического программирования в форме [12] было
найдено ее аналитическое решение.
В настоящей статье исследуется задача оптимального управления дискрет-
ной стохастической системой с критерием вероятности первого достижения
ее траекториями заданной трубки. Исследуются достаточные условия опти-
мальности, схожие с [12], и свойства двусторонних границ функции Белл-
мана [13, 14]. Находятся условия эквивалентности с задачей оптимального
управления с вероятностным терминальным критерием [12]. В качестве при-
мера рассматривается задача управления портфелем ценных бумаг.
2. Постановка задачи
Рассмотрим стохастическую систему с дискретным временем
{
xk+1 = fk (xk,uk,ξk) ,
(1)
k = 0,N,
x0 = X,
где xk ∈ Rn вектор состояния, uk ∈ Uk ⊂ Rm - вектор управления, Uk - мно-
жество ограничений на управление, ξk - вектор случайных возмущений со
значениями на Rs и известным распределением Pξk , fk : Rn × Rm × Rs → Rn -
функция перехода (функция системы), N ∈ {0} ∪ N горизонт управления.
В отношении системы (1) введем п р е д п о л о ж е н и я:
1. Известна полная информация о векторе состояния xk (данный факт
позволяет строить управление в классе функций uk = γk (xk), где γk (·)
некоторая измеримая функция). В данном случае говорят, что “управление
ищется в классе полной обратной связи по состоянию”;
2. Начальное состояние x0 = X является детерминированным вектором
из Rn;
3. Функция системы fk (xk, uk, ξk) непрерывна для всех k;
4
4. Вектор управления uk формируется следующим образом: uk = γk (xk),
где γk : Rn → Rm
- измеримая функция с ограниченными значениями
uk ∈ Uk, причем Uk компактное множество;
5. Вектор состояния xk+1 формируется следующим образом: на шаге k
реализуется вектор xk, далее формируется вектор управления uk = γk (xk) и
в последнюю очередь реализуется случайное возмущение ξk;
6. Управлением называется набор функций u (·) = (γ0 (·) , . . . , γN (·)) ∈ U,
классом допустимых управлений называется множество U = U0 × . . . × UN ,
где Uk множество борелевских функций γk (·) с ограниченными на Uk зна-
чениями;
7. Случайный вектор ξk является непрерывным с значениями в Rs и из-
вестным распределением Pξk , причем компоненты вектора ζ = (X, ξ0, . . . , ξN )
независимы.
Заметим, что система (1) является марковской, т.е. ее поведение в будущем
не зависит от прошлого и полностью определяется текущим состоянием.
На траекториях системы (1) определим функционал вероятности
(
)
⋃
P (u (·)) = P
{xk+1 ∈ Fk+1}
,
k=0
множества Fk имеют вид
{
Fk = {x ∈ Rn : Φk (x) ≤ ϕ} , k = 1,N + 1,
F0 = Rn,
где ϕ ∈ R
известный скаляр, Φk : Rn → R
непрерывные функции,
k = 1,...,N + 1, причем ΦN+1 (x) ограничена снизу.
Рассматривается задача
(2)
P (u(·)) → max ,
u(·)∈U
где U = U0 × . . . × UN .
Физически задача (2) заключается в поиске управления, максимизирую-
щего вероятность первого достижения трубки траекторий, заданной в виде
последовательности множеств {Fk+1}Nk=0.
Отметим, что метод динамического программирования в форме [12], сфор-
мулированный для задач оптимального управления с вероятностным терми-
нальным критерием, неприменим в общем случае к задаче (2). В разделе 3
устанавливаются достаточные условия оптимальности в форме метода дина-
мического программирования, схожие с [12].
3. Метод динамического программирования и
двусторонние оценки функции Беллмана
Определим функцию Беллмана Bk : Rn → [0, 1] в задаче (2) как
(
)
Bk (x) =
sup
P min Φi+1 (xi+1) ≤ ϕxk = x
γk(·)∈Uk,...,γN (·)∈UN
i=k,N
5
Принимая во внимание сделанные в разделе 2 предположения, cформулируем
теорему об уравнении Беллмана для задачи (2) в пространстве состояний
размерности n.
Теорема 1. Пусть выполнены условия:
1) функции fk (xk, uk, ξk) непрерывны для всех k = 0, N ;
2) функции Φk (xk) непрерывны для всех k = 1, N + 1;
3) функция ΦN+1 (xN+1) ограничена снизу;
4) случайные векторы X, ξ0, . . . , ξN независимы;
5) множества U0, . . . , UN компактны.
Тогда оптимальное управление в задаче (2) существует в классе изме-
римых функций u∗ (·) ∈ U и определяется в результате решения следующих
задач:
γ∗k (x) = arg max Mξ
(3)
[IFk (x) + (1 - IFk (x)) Bk+1 (fk (x, u, ξk
))] ,
k
u∈Uk
(4)
Bk (x) = max Mξk [IFk (x) + (1 - IFk (x)) Bk+1 (fk (x,u,ξk
))] , k = 0, N ,
u∈Uk
(5)
BN+1 (x) = IFN+1
(x) .
Доказательства теоремы 1, всех последующих теорем, утверждений и ле-
мы приведены в Приложении.
В теореме 1 Mξk [·] оператор математического ожидания по распреде-
лению Pξk случайного вектора ξk, а IFk (x) индикаторная функция мно-
жества Fk. Заметим, что соотношения (3)-(5) отличаются от классического
уравнения Беллмана [12] в задаче с вероятностным терминальным критерием
наличием в правой части дополнительного слагаемого IFk (x) и множителя
1 - IFk (x) под оператором математического ожидания.
Как известно, прямое интегрирование уравнения Беллмана связано с труд-
ностями вычислений кратных интегралов и решения задач стохастического
программирования в его правой части. Указанные трудности неоднократ-
но проявлялись даже для систем простейшего вида, например для системы
управления портфелем ценных бумаг [15-17] и для системы управления ста-
ционарным спутником [12]. Вследствие этого на протяжении почти двадцати
лет задачи оптимального управления с вероятностным критерием рассмат-
ривались в одношаговой N = 0 и двухшаговой N = 1 постановках [15-17].
В [13, 14] с использованием поверхностей уровня 1 и 0 были найдены дву-
сторонние границы функции Беллмана, что позволило получить решение от-
дельных задач оптимального управления с вероятностным критерием для
произвольного шага по времени N.
По аналогии с [13, 14] исследуем свойства функции Беллмана для зада-
чи (2) с помощью поверхностей уровня 1 и 0 функции Беллмана.
4. Двусторонние границы функции Беллмана
Введем в рассмотрение поверхности уровней 1 и 0 функции Беллмана
Ik = {x ∈ Rn : Bk (x) = 1} , Ok = {x ∈ Rn : Bk (x) = 0}
6
и множество Bk = Rn \ {Ik ∪ Ok}. Для удобства введем обозначение Fk =
= Rn \ Fk. Нетрудно видеть, что из определения введенных множеств вы-
полнено, что
Bk (x) = 1,
x∈Ik,
Ik ∪ Bk ∪ Ok = Rn,
Bk (x) ∈ (0,1) ,
x∈Bk,
Bk (x) = 0,
x∈Ok.
Теорема 2. Справделивы утверждения:
1. Множества Ik, k = 0, N , удовлетворяют рекуррентным соотношени-
ям в обратном времени
Ik = Fk ∪ {x ∈ Rn : ∃u ∈ Uk : Pξ
(fk (x, u, ξk) ∈ Ik+1) = 1} , k = 0, N ,
k
IN+1 = FN+1;
2. Множества Ok, k = 0, N , удовлетворяют рекуррентным соотношени-
ям в обратном времени
Ok = Fk ∩ {x ∈ Rn : ∀u ∈ Uk : Pξ
(fk (x, u, ξk) ∈ Ok+1) = 1} , k = 0, N ,
k
ON+1 = FN+1;
3. Для x ∈ Ik функция γ∗k(x) принимает любое значение из множества
UIk(x)
(6)
UIk (x) = {u ∈ Uk : Pξ
(fk (x, u, ξk) ∈ Ik+1) = 1};
k
4. Для x ∈ Ok функция γ∗k (x) принимает любое значение из множества
Uk;
5. Уравнение Беллмана в области x ∈ Bk допускает представление
{
(7) Bk (x) = max Pξk (fk (x, u, ξk) ∈ Ik+1) +
u∈Uk
[
]}
+ Pξk (fk (x,u,ξk) ∈ Bk+1)Mξk Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Bk+1
;
6. Для x ∈ Bk и u ∈ Uk справедлива система неравенств
Pξk (fk (x, u, ξk) ∈ Fk+1) ≤ Pξk (fk (x, u, ξk) ∈ Ik+1) ≤
(8)
≤ Mξk [Bk+1 (fk (x,u,ξk))] ≤ 1 - Pξk (fk (x,u,ξk) ∈ Ok+1);
7. Для x ∈ Bk функция Беллмана удовлетворяет двустороннему неравен-
ству
(9)
Ψk (x) ≤ Bk (x) ≤ Bk (x) ≤ Bk
(x),
где
(10)
Ψk (x) = sup Pξk (fk (x,u,ξk) ∈ Fk+1
),
u∈Uk
7
Bk (x) нижняя, а Bk (x) верхняя оценки функции Беллмана
Bk (x) = sup Pξk (fk (x,u,ξk) ∈ Ik+1) ,
u∈Uk
Bk (x) = sup {1 - Pξk (fk (x,u,ξk) ∈ Ok+1)} ,
u∈Uk
причем BN (x) = BN (x) = BN (x).
Отличием правой части соотношений п. 1 теоремы 2 от соотношений для
поверхности уровня 1 функции Беллмана в задаче с терминальным вероят-
ностным критерием [18] является наличие операции объединения с множе-
ством Fk. Для поверхности уровня 0 функции Беллмана отличие заключа-
ется в наличии операции пересечения с множеством Fk. Пункты 3 и 4 уста-
навливают простейшие (относительно (3)) выражения для определения опти-
мального управления при xk ∈ Ik ∪ Ok, которые с точностью до конструкций
множеств Ik совпадают с аналогичными в задаче с терминальным вероят-
ностным критерием. Пункты 6 и 7 теоремы 2 устанавливают двусторонние
оценки функции правой части уравнения динамического программирования
и функции Беллмана соответственно. При этом выражения для нижних и
верхних границ с точностью до конструкций множеств Ik и Ok совпадают
с аналогичными в задаче с терминальным критерием [13, 18]. Отличием же
является наличие дополнительного неравенства в левой части (8) и, как след-
ствие, неравенства Ψk (x) ≤ Bk (x).
Исследуем детально свойства стратегии, максимизирующей на каждом
шаге нижнюю границу функции правой части уравнения динамического про-
граммирования.
5. Субоптимальная стратегия
(
)
Определим стратегию u (·) = γ0 (·) , . . . , γN (·) , где
(11)
γk (x) = arg max Pξk (fk (x,u,ξk) ∈ Ik+1), k = 0,N.
u∈Uk
Данная стратегия обладает следующими с в о й с т в а м и:
• При x ∈ Ik ∪ Ok для всех k = 0, N выполнено равенство γ
(x) = γ∗k (x);
k
• Для k = N выполнено равенство γk (x) = γ∗k (x);
• Из Fk = Ik для всех k = 0, N следует γk (x) = γ∗k (x).
Теорема 3. Пусть стратегия u(·) существует в классе U. Тогда спра-
ведливы утверждения:
1. Значение вероятностного критерия на стратегии u (·) имеет вид
P (u (·)) = F (ϕ, N, X) +
(
) (
)
∑
⋂
⋃
⋂
{
}
+ P
{xk ∈ Ik} P
xk+1 ∈ Ik+1
{xk ∈ Ik}
+
(12)
l=1
k=1
k=0
k=1
(
) (
)
⋂
⋃
{
}
⋂
+P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
,
k=1
k=0
k=1
8
где xk
траектория системы, замкнутой управлением (11)
{
xk+1 = fk (xk,uk,ξk) ,
k = 0,N,
x0 = X,
где uk = γ
(xk);
k
2. Оптимальное значение вероятностного критерия имеет вид
P (u∗ (·)) = F (ϕ, N, X) +
(
) (
)
∑
⋂
⋃
{
}
⋂
+ P
{x∗k ∈ Ik} P
x∗k+1 ∈ Ik+1
{x∗k ∈ Ik}
+
(13)
l=1
k=1
k=0
k=1
(
) (
)
⋂
⋃
{
}
⋂
+P
{x∗k ∈ Ik} P
x∗k+1 ∈ Fk+1
{x∗k ∈ Ik}
,
k=1
k=0
k=1
где x∗k
траектория системы, замкнутой оптимальным управлением
{
x∗k+1 = fk (x∗k,u∗k,ξk) ,
k = 0,N,
x∗0 = X,
где u∗k = γ∗k (x∗k);
3. Для любых ϕ ∈ R, N ∈ N, X ∈ Rn справедлива система неравенств
(14)
FF (ϕ,N,X) ≤ F (ϕ,N,X) ≤ P (u (·)) ≤ P (u∗
(·)) ≤ F (ϕ, N, X) ,
где функции
FF : R × N × Rn → [0,1] , F : R × N × Rn → [0,1] , F : R × N × Rn → [0,1]
имеют вид
FF (ϕ,N,X) = Ψ0 (X) , F (ϕ,N,X) = B0 (X) , F (ϕ,N,X) = B0 (X) .
Из теоремы 3 можно получить оценку качества субоптимальной страте-
гии (11) u (·)
P (u∗ (·)) - P (u (·)) ≤ Δ (ϕ, N, X) ,
справедливую для всех
ϕ ∈ R, N ∈ {0} ∪ N, X ∈ Rn,
где функция Δ : R × N × Rn → [0, 1] имеет вид
Δ(ϕ,N,X) = F (ϕ,N,X) - F (ϕ,N,X) -
(
) (
)
∑
⋂
⋃
{
}
⋂
− P
{xk ∈ Ik} P
xk+1 ∈ Ik+1
{xk ∈ Ik}
-
(15)
l=1
k=1
k=0
k=1
(
) (
)
⋂
⋃
{
}
⋂
−P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
k=1
k=0
k=1
9
Исследуем условия эквивалентности задачи (2) и задачи оптимального
управления с вероятностным терминальным критерием.
6. Условия эквивалентности с задачей оптимального управления
с вероятностным терминальным критерием
Рассмотрим вероятностный терминальный критерий на траекториях си-
стемы (1)
(16)
Pϕ (u(·)) = P(xN+1 ∈ FN+1) = P(ΦN+1 (xN+1
) ≤ ϕ)
и задачу оптимального управления
(17)
Pϕ (u(·)) → max .
u(·)∈U
Согласно [12] решение задачи (17) существует в классе U и определяется в
результате решения уравнений динамического программирования
[
]
(18)
γϕk (x) = arg max Mξ
Bϕk+1 (fk (x,u,ξk))
,
k
u∈Uk
[
]
(19)
Bϕk (x) = max Mξ
Bϕk+1 (fk (x,u,ξk))
,
k = 0,N,
k
u∈Uk
(20)
BϕN+1 (x) = IF
(x) ,
N+1
где Bϕk (x) - функция Беллмана в задаче (17).
Сформулируем утверждение об эквивалентности задач (2) и (17).
Лемма. Пусть для всех k = 0,N выполнено Fk ⊆ ΔIk, где
(21)
ΔIk = {x ∈ Rn : ∃u ∈ Uk : P(fk (x,u,ξk) ∈ Ik+1) = 1}.
Тогда задача (3) эквивалентна задаче оптимального управления с вероят-
ностным терминальным критерием (17) в смысле равенства оптимальных
стратегий u∗ (·) = uϕ (·), оптимальных значений критериев P (u∗ (·)) =
= Pϕ (uϕ (·)) и равенства для всех k = 0,N + 1 и x ∈ Rn функций Белл-
мана Bk (x) = Bϕk (x).
Отметим, что из леммы для узкого класса систем можно получить более
конкретные условия эквивалентности задач (2) и (17), однако это не является
целью данной статьи.
Применим полученные результаты для исследования дополнительных
свойств задачи оптимального управления портфелем ценных бумаг с веро-
ятностным критерием.
7. Управление портфелем ценных бумаг с
нефиксированным временем окончания
Рассмотрим дискретную стохастическую систему управления вида [13, 19]
∑
,
xk+1 = xk 1 + bu1k + ujkξj-1k
(22)
k = 0,N,
j=2
x0 = X,
10
где n = 1, m и s = m - 1 размерности векторов состояния, управления
и случайных возмущений соответственно, X > 0, b > -1, ϕ < 0 детерми-
(
)T
нированные скаляры, ξk =
ξ1k,... ,ξm-1k
случайные векторы с незави-
симыми компонентами, причем ξk+1 и ξk являются независимыми для всех
k = 0,N - 1. Пусть ограничения на управления заданы в виде
∑
Uk = U =
u∈Rm :
uj = 1, uj ≥ 0, ∀j = 1,m
,
k = 0,N.
j=1
Предположим, что носитель распределения случайных векторов ξk имеет вид
⊗
[
]
suppρξ (t) =
εj,εj
, причем ∀j = 1, m - 1 выполнено -1 ≤ εj ≤ b ≤ εj.
j=1
Рассмотрим задачу оптимального управления с нефиксированным време-
нем
(
)
(23)
P min {-xk+1} ≤ ϕ
→ sup
k=0,N
u(·)∈U
и задачу с вероятностным терминальным критерием
(24)
P(-xN+1 ≤ ϕ) → sup .
u(·)∈U
В обозначениях, введенных в статье, имеем:
∑
Fk = F = [-ϕ,+∞), Φk (x) = -x, fk
(x,u,ξ) = x1+bu1 + ujξj-1.
j=2
Если за X принять размер стартового капитала, за xk - размер капитала
на начало k-го года, за u1k - долю xk капитала, вкладываемого в безрисковый
актив (например, в надежный банк), имеющий доходность b, ujk - доли ка-
питала, вкладываемые в рисковые активы, характеризующиеся доходностя-
ми ξj-1k, j = 2, m, то задача (23) заключается в максимизации вероятности
достижения размера капитала уровня (-ϕ) за время, ограниченное сверху
величиной N + 1, а задача (24) за время N + 1 путем инвестиций в неко-
торые активы.
Задача (24) рассматривалась в двухшаговой постановке N = 1 для слу-
чая одного рискового актива m = 2 в [15, 16]. В [13] был найден целый класс
асимптотически оптимальных (при N → ∞) стратегий. Задача (23) рассмат-
ривается впервые.
Воспользуемся результатами настоящей статьи и проверим условия экви-
валентности задач (23) и (24).
Утверждение 1. Для всех k = 0,N выполнены равенства
[
)
(
)
(
]
Ik = ΔIk =
ϕIk , +∞
,
Bk =
ϕOk, ϕIk
,
Ok =
-∞,ϕOk
,
11
где скаляры ϕIk , ϕOk определяются выражениями
(
{
})k-N-1
ϕI
= -ϕ 1 + max b, max εj
,
k
j=1,m-1
(
{
})k-N-1
ϕO
= -ϕ 1 + max b, max εj
k
j=1,m-1
Из утверждения 1 вытекает, что условие леммы выполняется F ⊆ ΔIk и,
следовательно, задачи (23) и (24) являются эквивалентными. Из утвержде-
ния 1 следует, что управление, оптимальное по вероятностному терминально-
му критерию, максимизирует вероятность первого достижения капиталом xk
уровня (-ϕ) за время, ограниченное сверху величиной N.
Воспользуемся двусторонними границами функции оптимального значе-
ния вероятностного критерия для определения оценки такого момента вре-
мени N∗ ∈ N, что
(
)
P max
x∗k ≥ ϕ
= 1,
k∈{0,...,N∗}
где {x∗k}Nk=0 - траектории системы (22), замкнутой оптимальным управлением
u∗ (·). Интересно, что двусторонние границы функции оптимального значе-
ния вероятностного критерия (см. теорему 3) позволяют найти такую оценку
без нахождения оптимального управления.
Утверждение 2. Пусть {xk}Nk=0
траектории системы (22), замк-
нутой управлением (11), где
∑
(25)
γ
(x) = arg max Px 1 + bu1 + uj ξj-1k≥ϕI
,
k = 0,N.
k
k+1
u∈U
j=2
Тогда существует N ∈ N, такой что
(
)
P max
xk+1 ≥ ϕ
= 1,
k={0,...,N}
причем для любых X > 0, b > -1 выполнено N∗ ≥ N и
ln (-ϕ) - ln (X)
(26)
N =
(
{
}) - 1
ln
1 + max b, max εj
j=1,m-1
Проведем серию численных экспериментов для проверки адекватности
оценки (26). При этом будем рассматривать случай одного рискового актива,
для которого в [13] была найдена стратегия (25)
{
(1, 0)T , x ≥ -ϕ (1 + b)k-N-1 ,
γk (x) =
(0, 1)T , x < -ϕ (1 + b)k-N-1 .
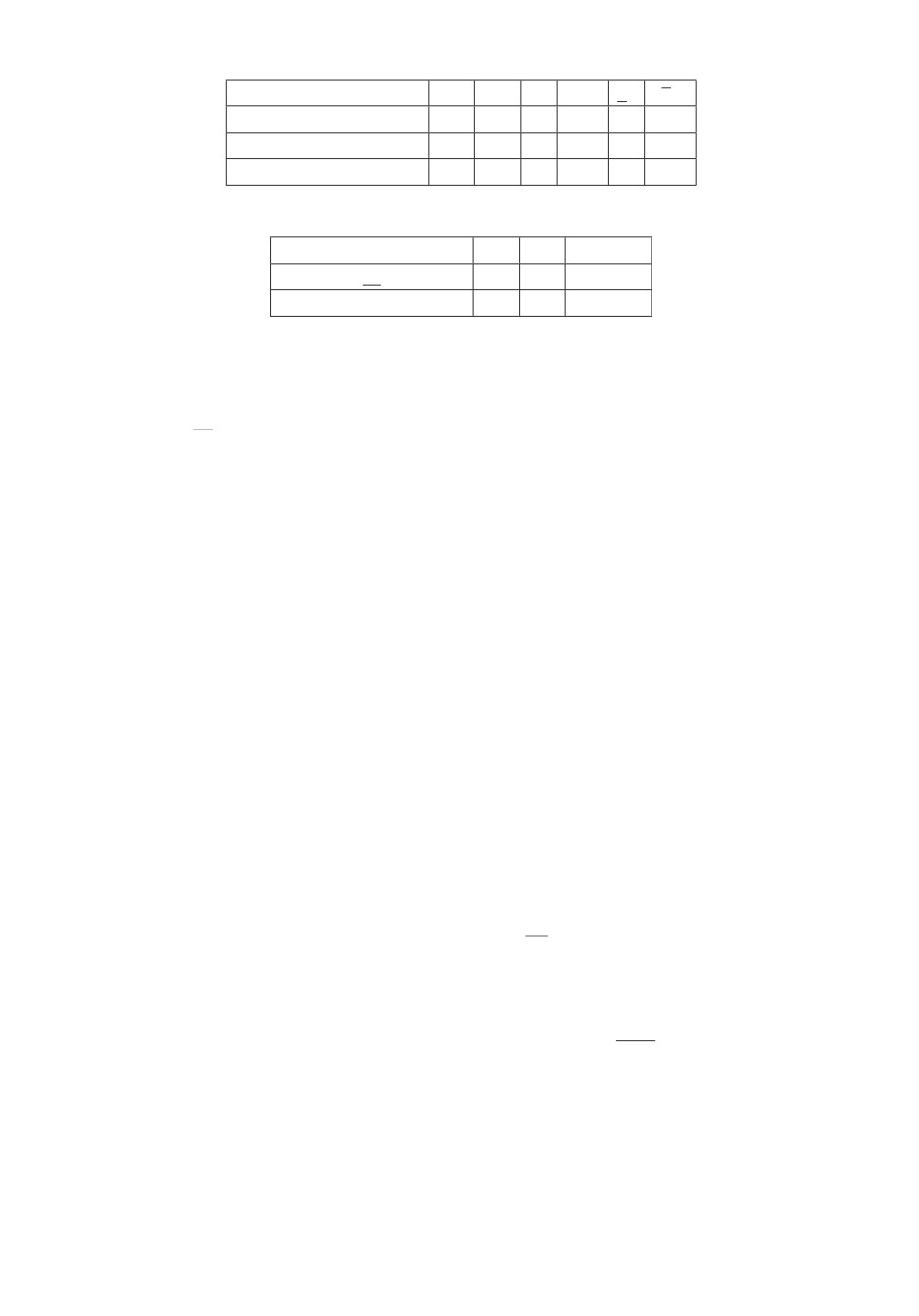
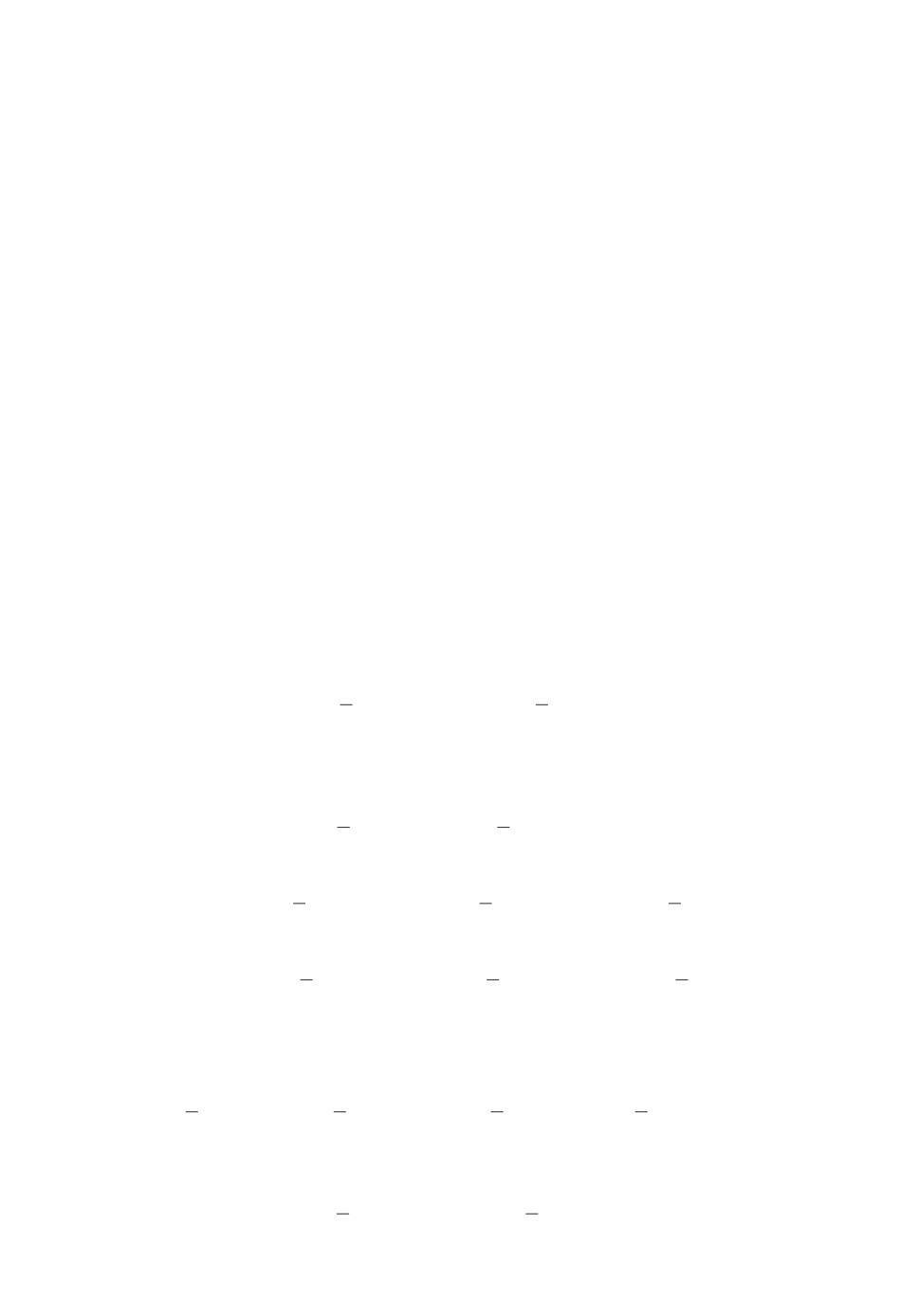
Значения параметров системы заданы в табл. 1.
12
Таблица 1. Значения параметров системы
Номер эксперимента N ϕ X b ε1 ε1
а
200
100
15
0,01
-1
0,02
б
200
100
20
0,01
-1
0,02
в
200
100
25
0,01
-1
0,02
Таблица 2. Значения параметров системы
Номер эксперимента а б
в
N
189
160
138
N∗
189
160
139
Для моделирования уровня N∗ будем использовать метод Монте-Карло из
50000 наблюдений. Результаты моделирования занесены в табл. 2. Из табл. 2
видно, что N является относительно точной оценкой числа N∗.
8. Заключение
В статье рассмотрена задача оптимального управления дискретной сто-
хастической системой с критерием вероятности первого достижения траекто-
риями системы заданной трубки траекторий. Получены достаточные условия
оптимальности в форме метода динамического программирования. Найдены
двусторонние оценки функции правой части уравнения метода динамическо-
го программирования, функции Беллмана и функции оптимального значения
вероятностного критерия. Получены аналитические выражения для прибли-
женного определения оптимального управления и найдены оценки точности
такого управления. Доказаны условия эквивалентности данной задачи и за-
дачи оптимального управления с вероятностным терминальным критерием.
Данные условия были проверены на задаче оптимального управления порт-
фелем ценных бумаг.
ПРИЛОЖЕНИЕ
Доказательство теоремы
1. Введем в рассмотрение функцию
Φ0 : Rn → R, такую что Φ0 (x) = Φ1 (x). Расширим вектор состояния системы
путем введения новой переменной yk = mini=0,k Φi (xi). Расширенная система
управления имеет вид
xk+1 = fk (xk, uk,ξk),
yk+1 = min {yk, Φk (xk)} ,
k = 0,N,
x0 = X,
y0 = Φ0 (X) ,
где uk = γk (xk, yk). Введем в рассмотрение функцию правой части расширен-
ной систем
f :Rn+1 ×Rm ×Rs →Rn+1 :
fk (x,y,u,ξ) = (fk (x,u,ξ) ,min {y, Φk (x)})T .
13
Тогда эквивалентную задачу оптимального управления можно представить
в виде
P(min {yN+1, ΦN+1 (xN+1)} ≤ ϕ) → sup , k = 0,N,
u(·)
U
гд
U
U0 × ...
UN,
{
}
Uk =
γ : Rn+1 → Rm| γ измерима по Борелю, ∀x ∈ Rn+1 : γ(x) ∈ Uk
Эквивалентность выше понимается в смысле равенства критериев
(
)
P (u (·)) = P min Φk+1 (x) ≤ ϕ
= P(min{yN+1, ΦN+1 (xN+1)} ≤ ϕ).
k=0,N
Уравнение Беллмана для эквивалентной задачи имеет вид [12]:
[
(
)]
Bk+1
(Π.1)
γ∗k (x,y) = arg max Mξ
fk (x,y,u,ξk)
,
k
u∈Uk
[
(
)]
Bk+1
(Π.2)
Bk (x,y) = max Mξ
fk (x,y,uk,ξk)
,
k
u∈Uk
(Π.3)
BN+1 (x,y) = I{min{y,Φ
(x, y) , k = 0, N .
N+1(x)}≤ϕ}
Согласно [12] если выполнены условия:
1) функци
fk непрерывны для всех k = 0,N;
2) функция min {y, ΦN+1 (x)} непрерывна и ограничена снизу;
3) случайные векторы X, ξ0, . . . , ξN независимы;
4) множества U0, . . . , UN компактны,
то оптимальное управление существует в классе измеримых функций и опре-
деляется в результате решения задач (П.1)-(П.3).
На шаге k = N уравнение Беллмана можно записать в виде
[
]
(Π.4)
BN (x,y) = max Mξ
=
N
I{min{y, ΦN (x), ΦN+1(f(x,u,ξk))}≤ϕ} (x, y)
u∈UN
[
(
)
= max MξN I{min{y,ΦN (x)}≤ϕ} (x,y) +
1 - I{min{y, ΦN(x)}≤ϕ} (x,y)
×
u∈UN
]
× I{ΦN+1(f(x,u,ξk))≤ϕ} (x)
=
[
(
)
×
= max MξN I{min{y,ΦN (x)}≤ϕ} (x,y) +
1 - I{min{y, ΦN(x)}≤ϕ} (x,y)
u∈UN
]
× BN+1 (fN (x,u,ξN))
Отсюда легко показать, что для любого k = 0, N уравнение (П.2) можно пред-
ставить в виде
[
(Π.5)
Bk (x,y) = max Mξ
I{min{y,Φk(x)}≤ϕ} (x,y) +
k
u∈Uk
]
(
)
+
1 - I{min{y, Φk(x)}≤ϕ} (x,y)
Bk+1 (fk (x,u,ξk)) ,
14
поэтому для функции Беллмана в эквивалентной задаче справедливо пред-
ставление
1,
y ≤ϕ,
{
}
B
(Π.6)
k(x, y) =
max Mξk IFk(x)+(1-IFk(x))Bk+1(fk(x,u,ξk)) , y > ϕ.
u∈Uk
Отсюда получаем представление и для оптимального управления
любой элемент из Uk,
y ≤ϕ,
{
}
(Π.7) γ∗(x, y) =
k
arg max Mξk IFk (x) + (1 - IFk (x))Bk+1(fk(x, u, ξk)) , y > ϕ.
u∈Uk
Условия 1-5 теоремы 1 получаются из условий существования оптималь-
ного управления для задачи с терминальным критерием. Причем пункты
2 и 3 следуют из условий непрерывности и ограниченности снизу функции
min {y, ΦN+1 (x)}.
Теорема 1 доказана.
Доказательство теоремы 2. 1. Рассмотрим уравнение Беллмана на
некотором шаге k. Для поверхности уровня 1 справедливо соотношение
{
}
Ik = x ∈ Rn
max Mξ
[IFk (x) + (1 - IFk (x)) Bk+1 (fk (x, u, ξk))] = 1
=
k
u∈Uk{
}
=Fk ∪ x∈Rn
max Mξ
[Bk+1 (fk (x, u, ξk))] = 1
k
u∈Uk
Используя формулу полного математического ожидания, получаем
{
{
Ik = Fk ∪ x ∈ Rn
max
Pξk (fk (x, u, ξk) ∈ Ik+1) ×
u∈Uk
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
+
+ (1 - Pξk (fk (x, u, ξk) ∈ Ik+1)) ×
}
[
]}
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
=1 .
Из равенств
[
]
Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
= 1,
[
]
Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
< 1,
следует, что
{
{
Ik = Fk ∪ x ∈ Rn
max
Pξk (fk (x, u, ξk) ∈ Ik+1) +
u∈Uk
+ (1 - Pξk (fk (x, u, ξk) ∈ Ik+1)) ×
}
}
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
=1
=
{
}
=Fk ∪ x∈Rn
max Pξ
(fk (x, u, ξk) ∈ Ik+1) = 1
k
u∈Uk
Утверждение 1 доказано.
15
2. Аналогично п. 1 получаем соотношение для поверхности уровня 0 функ-
ции Беллмана:
{
}
Ok = x ∈ Rn
max Mξ
[IFk (x) + (1 - IFk (x)) Bk+1 (fk (x, u, ξk))] = 0
=
k
u∈Uk{
}
=Fk ∩ x∈Rn
max Mξ
[Bk+1 (fk (x, u, ξk))] = 1
k
u∈Uk
Выполним преобразование правой части последнего выражения с использо-
ванием формулы полного математического ожидания:
{
{
Ok = Fk ∩ x ∈ Rn
max
Pξk (fk (x, u, ξk) ∈ Ik+1) ×
u∈Uk
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
+
+ Pξk (fk (x,u,ξk) ∈ Bk+1)×
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Bk+1
+
+ Pξk (fk (x,u,ξk) ∈ Ok+1)×
}
}
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ok+1
=0 .
Из равенств
[
]
Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ik+1
= 1,
[
]
Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Bk+1
∈ (0, 1) ,
[
]
Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Ok+1
=0
получаем, что
{
{
Ok = Fk ∩ x ∈ Rn
max
Pξk (fk (x, u, ξk) ∈ Ik+1) +
u∈Uk
+ Pξk (fk (x,u,ξk) ∈ Bk+1)×
}
}
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Bk+1
=0
=
{
=Fk ∩ x∈Rn
∀u∈Uk : Pξ
(fk (x, u, ξk) ∈ Ik+1) = 0,
k
}
Pξk (fk (x, u, ξk) ∈ Bk+1) = 0
=
}
= Fk ∩ {x ∈ Rn
∀u ∈ Uk : Pξ
(fk (x, u, ξk) ∈ Ok+1) = 1
k
Утверждение 2 доказано.
3. Утверждение 3 следует из утверждения 1 теоремы 2.
4. Утверждение 4 выполнено, поскольку при x ∈ Ok справедливо равенство
Bk (x) = 0.
5. Утверждение 5 следует из утверждения 1 теоремы 2.
16
6. При x ∈ Bk функция правой части уравнения метода динамического
программирования представима в виде
Mξk [Bk+1 (fk (x,u,ξk))] = Pξk (fk (x,u,ξk) ∈ Ik+1) ×
(
[
])
×
1-Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Bk+1
+
+ (1 - Pξk (fk (x, u, ξk) ∈ Ok+1)) ×
[
]
×Mξk
Bk+1 (fk (x,u,ξk))
fk (x,u,ξk) ∈ Bk+1
,
откуда с использованием двустороннего неравенства для выпуклой комбина-
ции получаем
{
}
min Pξk (fk (x, u, ξk) ∈ Ik+1) , (1 - Pξk (fk (x, u, ξk) ∈ Ok+1))
≤
≤ Mξk [Bk+1 (fk (x,u,ξk))] ≤
{
}
≤ max Pξk (fk (x,u,ξk) ∈ Ik+1) , (1 - Pξk (fk (x,u,ξk) ∈ Ok+1))
С использованием соотношений 1- Pξk (fk(x, u, ξk) ∈ Ok+1) = Pξk (fk(x, u, ξk) ∈
∈ Ik+1) + Pξk(fk(x,u,ξk) ∈ Bk+1) и Fk ⊆ Ik завершаем доказательство утвер-
ждения 6 теоремы 2.
7. Утверждение 7 следует из предыдущего путем взятия супремума во всех
частях неравенства (8).
Доказательство теоремы 3.
1. Введем систему гипотез, образую-
щих полную группу несовместных событий:
{
}
{
}
⋃
⋂
{xk ∈ Ik}
,
{xk ∈ Ik}
k=1
k=1
Тогда с учетом формулы полной вероятности справедлива цепочка равенств
(
)
⋃
{
}
P (u(·)) = P
xk+1 ∈ Fk+1
=
k=0
(
) (
)
⋃
⋃
{
}
⋃
(Π.8)
=P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
+
k=1
k=0
k=1
(
) (
)
⋂
⋃
⋂
{
}
+P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
k=1
k=0
k=1
Исследуем второй множитель первого слагаемого правой части последнего
выражения. Из цепочки равенств
(
)
(
)
P xN+1 ∈FN+1
xN ∈IN
=P xN+1 ∈IN+1
xN ∈IN
=1
следует, что
(
)
⋃
{
}
⋃
P
xk+1 ∈ Fk+1
{xk ∈ Ik}
= 1.
k=0
k=1
17
С учетом последнего равенства выражение (П.8) принимает вид
(
)
⋃
P (u (·)) = P
{xk ∈ Ik}
+
k=1
(Π.9)
(
) (
)
⋂
⋃
{
}
⋂
+P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
k=1
k=0
k=1
Введем в рассмотрение систему гипотез, образующих полную группу несов-
местных событий:
{
}
{
}
⋃
⋂
{xk ∈ Ik}
,
{xk ∈ Ik}
k=1
k=1
Воспользуемся формулой полной вероятности для первого слагаемого в пра-
вой части (П.9):
(
)
⋃
P
{xk ∈ Ik}
=
k=1
(
) (
)
⋃
⋃
⋃
(Π.10)
=P
{xk ∈ Ik} P
{xk ∈ Ik}
{xk ∈ Ik}
+
k=1
k=1
k=1
(
) (
)
⋂
⋃
⋂
+P
{xk ∈ Ik} P
{xk ∈ Ik}
{xk ∈ Ik}
k=1
k=1
k=1
Аналогично (П.9) преобразуем правую часть (П.10), откуда получим
(
) (
)
⋃
⋃
P
{xk ∈ Ik}
=P
{xk ∈ Ik}
+
k=1
k=1
(Π.11)
(
) (
)
⋂
⋃
⋂
+P
{xk ∈ Ik} P
{xk ∈ Ik}
{xk ∈ Ik}
k=1
k=1
k=1
Выполним подстановку (П.10) в (П.9):
(
)
⋃
P (u(·)) = P
{xk ∈ Ik}
+
k=1
(
) (
)
⋂
⋃
⋂
(Π.12)
+P
{xk ∈ Ik} P
{xk ∈ Ik}
{xk ∈ Ik}
+
k=1
k=1
k=1
(
) (
)
⋂
⋃
⋂
{
}
+P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
k=1
k=0
k=1
18
Проводя аналогичные преобразования в отношении первого слагаемого
в (П.12) и вводя системы гипотез
{
}
{
}
⋃
⋂
{xk ∈ Ik}
,
{xk ∈ Ik}
,
l = 1,...,N - 2,
k=1
k=1
получаем выражение для значения вероятностного критерия на страте-
гии u (·):
P (u (·)) = P (x1 ∈ I1) +
(
) (
)
∑
⋂
⋃
⋂
+ P
{xk ∈ Ik} P
{xk ∈ Ik}
{xk ∈ Ik}
+
(Π.13)
l=1
k=1
k=1
k=1
(
) (
)
⋂
⋃
{
}
⋂
+P
{xk ∈ Ik} P
xk+1 ∈ Fk+1
{xk ∈ Ik}
k=1
k=0
k=1
Заметим теперь, что для первого слагаемого (П.13) справедлива цепочка ра-
венств
P(x1 ∈ I1) = P(f0 (X,u0,ξ0) ∈ I1) = B0 (X) = F (ϕ,N,X) ,
откуда следует выражение (14).
Пункт 1 теоремы 3 доказан.
2. Для доказательства п. 2 теоремы 3 достаточно заметить, что при xk ∈ Ik
выполнено u∗k = uk для всех k = 0, N , откуда аналогичным способом можно
получить выражение (14) для функции оптимального значения вероятност-
ного критерия на траекториях системы {x∗k}N+1k=1, замкнутой оптимальным
управлением u∗ (·).
Пункт 2 теоремы 3 доказан.
3. Пункт 3 теоремы 3 непосредственно следует из п. 7 теоремы 2 и п. 1
теоремы 3.
Теорема 3 доказана.
Доказательство леммы. Рассмотрим соотношения динамического
программирования (3)-(5) и (18)-(20) для задач (2) и (17) соответственно.
Поскольку в (19) ∀x ∈ Rn выполняется равенство
[
(
)
]
Bϕk (x) = max
M IIϕ
(x) +
1-IIϕ
(x) Bϕk+1 (fk (x,u,ξk)) ,
k = 0,N,
u∈Uk
k
k
где Iϕk - поверхность уровня 1 функции Беллмана Bϕk (x), то описанные усло-
вия эквивалентности верны в том случае, если поверхности уровня 1 функ-
ций Беллмана в задачах (2) и (17) равны Ik = Iϕk. С учетом рекуррентного
соотношения для Ik (см. п. 1 теоремы 2) отмеченное равенство справедливо
только в том случае, если
(Π.14)
Fk ⊆ {x ∈ Rn : ∃u ∈ Uk : P(fk (x,u,ξk) ∈ Ik+1) = 1}, k = 0,N.
Лемма доказана.
19
Доказательство утверждения 1. В соответствии с п. 1 теоремы 2
запишем уравнение для поверхностей уровней 1 и 0 функции Беллмана на
шаге k = N:
{
( (
)
)
}
∑
IN = F ∪ x ∈ R : ∃u ∈ U : P x
1+u1b+ uiξi
N
≥ -ϕ
=1
,
i=2
{
( (
)
)
}
∑
ON = F ∩ x ∈ R : ∀u ∈ U : P x
1+u1b+ uiξi
N
< -ϕ
=1
i=2
Используя результат из [13], где были найдены решения соответствующих
уравнений, и введенные в разделе 6 обозначения для границ множеств Ik
и Ok, получаем:
[
)
(
{
})-1
[
)
IN
= [ϕ, +∞) ∪ ϕ
1 + max b, max bj
,+∞
=
ϕIN , +∞
,
j=2,m
(
]
(
{
})-1
(
]
ON
= (-∞, ϕ] ∩
-∞,ϕ
1 + max b, max bj
=
-∞,ϕON
j=2,m
Отсюда следует, что IN = ΔIN . Используя п. 1 теоремы 2, получаем, что на
шаге k = N - 1 уравнение для изобелл примет вид
{
( (
)
)
}
∑
IN-1 = F ∪ x ∈ R : ∃u ∈ U : P x
1+u1b+ uiξi
≥ϕI
=1
,
N-1
N
i=2
{
( (
)
)
}
∑
ON-1 = F ∩ x ∈ R : ∀u ∈ U : P x
1+u1b+ ui ξi
<ϕO
=1
N-1
N
i=2
По аналогии с шагом k = N получаем
[
)
(
]
IN-1 = ΔIN-1 =
ϕIN-1, +∞
,
ON-1 =
-∞,ϕON-1
Оперируя математической индукцией, заключаем, что для всех k = 0, N вы-
полнено
[
)
(
]
Ik = ΔIk =
ϕIk , +∞
,
Ok =
-∞,ϕOk
Утверждение 1 доказано.
Доказательство утверждения 2. Рассмотрим стратегию управле-
ния (11), которая с учетом утверждения 1 принимает вид (25). Из п. 3 теоре-
мы 3 следует, что
(
)
(Π.15)
P (u (·)) = P
max
xk+1 ≥ -ϕ
≥ F (ϕ,N,X),
k∈{0,...,N}
где функция F с учетом
(
{
})-N
ϕI
= -ϕ 1 + max b, max εj
1
j=1,m-1
20
имеет вид
(Π.16)
F (ϕ, N, X) =
∑
ϕ
= maxPX1 + bu1 + ujξj-1≥-(
{
})N
0
u∈U
j=2
1 + max b, max εj
j=1,m-1
Нетрудно видеть, что величину N ∈ N можно определить как корень урав-
нения F (ϕ, N, X) = 1, но поскольку таких корней бесконечное множество, то
будем искать оценку N в виде
(Π.17)
N = min{N ∈ N : F (ϕ,N,X) = 1}.
Из (П.15) и (П.17) следует, что
(
)
P max
xk+1 ≥ -ϕ
= 1.
k∈{0,...,N}
Из определений поверхности уровня 1 функции Беллмана и функции F сле-
дует, что уравнение F (ϕ, N, X) = 1 эквивалентно включению X ∈ I0, что в
свою очередь эквивалентно неравенству
ϕ
X ≥-(
{
})N+1 .
1 + max b, max εj
j=1,m-1
Путем логарифмирования получаем
ln (-ϕ) - ln (X)
N ≥
(
{
}) - 1.
ln
1 + max b, max εj
j=1,m-1
Используя (П.17) окончательно получаем (26).
Утверждение 2 доказано.
СПИСОК ЛИТЕРАТУРЫ
1. Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория кон-
струирования систем управления. М.: Высш. шк., 2003.
2. Смирнов И.П. Об одной задаче быстродействия для стохастической управляе-
мой системы // Дифференц. уравнения. 1986. Т. 22. № 2. С. 247-254.
3. Бертсекас Д., Шрив С. Стохастическое управление: случай дискретного време-
ни. М.: Наука, 1985.
4. Zhou J. Infinite Horizon Optimal Control Problem for Stochastic Evolution Equa-
tions in Hilbert Spaces // J. Dyn. Control Syst. 2016. V. 22. No. 3. P. 531-554.
5. Agram N., Haadem S., Øksendal B., Proske F. A Maximum Principle for Infinite
Horizon Delay Equations // SIAM J. Math. Anal. 2013. V. 45. No. 4. P. 2499-2522.
21
6.
Agram N., Øksendal B. Infinite Horizon Optimal Control of Forward-Backward
Stochastic Differential Equations with Delay // J. Comput. Appl. Math. 2014. V. 259.
Part B. P. 336-349.
7.
Черноусько Ф.Л., Колмановский В.Б. Оптимальное управление при случайных
возмущениях. М.: Наука, 1978.
8.
Смирнов И.П. Об управлении вероятностью входа системы в заданную об-
ласть // Дифференц. уравнения. 1990. Т. 26. № 10. С. 1753-1758.
9.
Азанов В.М. Оптимальное управление линейной дискретной системой по кри-
терию вероятности // АиТ. 2014. № 10. С. 39-51.
Azanov V.M. Optimal Control for Linear Discrete Systems with Respect to Proba-
bilistic Criteria // Autom. Remote Control. 2014. V. 75. No. 10. P. 1743-1753.
10.
Семаков С.Л. Выбросы случайных процессов: приложения в авиации. М.: Наука,
2005.
11.
Хаметов В.М., Шелемех Е.А. Суперхеджирование американских опционов на
неполном рынке с дискретным временем и конечным горизонтом // АиТ. 2015.
№ 9. С. 125-149.
Khametov V.M., Shelemekh E.A. Superhedging of American Options on an Incom-
plete Market with Discrete Time and Finite Horizon // Autom. Remote Control.
2015. V. 76. No. 9. P. 1616-1634.
12.
Малышев В.В., Кибзун А.И. Анализ и синтез высокоточного управления лета-
тельными аппаратами. М.: Машиностроение, 1987.
13.
Азанов В.М., Кан Ю.С. Двухсторонняя оценка функции Беллмана в задачах
стохастического оптимального управления дискретными системами по вероят-
ностному критерию качества // АиТ. 2018. № 2. С. 3-18.
Azanov V.M., Kan Yu.S. Bilateral Estimation of the Bellman Function in the Prob-
lems of Optimal Stochastic Control of Discrete Systems by the Probabilistic Perfor-
mance Criterion // Autom. Remote Control. 2018. V. 79. No. 2. P. 203-215.
14.
Азанов В.М., Кан Ю.С. Усиленная оценка функции Беллмана в задачах стоха-
стического оптимального управления с вероятностным критерием качества //
АиТ. 2019. № 4. С. 53-69.
Azanov V.M., Kan Yu.S. Refined Estimation of the Bellman Function for Stochas-
tic Optimal Control Problems with Probabilistic Performance Criterion // Autom.
Remote Control. 2019. V. 80. No. 4. P. 634-647.
15.
Григорьев П.В., Кан Ю.С. Оптимальное управление по квантильному критерию
портфелем ценных бумаг // АиТ. 2004. № 2. C. 179-197.
Grigor’ev P.V., Kan Yu.S. Optimal Control of the Investment Portfolio with Respect
to the Quantile Criterion // Autom. Remote Control. 2004. V. 65. Nо. 2. P. 319-336.
16.
Бунто Т.В., Кан Ю.С. Оптимальное управление по квантильному критерию
портфелем ценных бумаг с ненулевой вероятностью разорения // АиТ. 2013.
№ 5. С. 114-136.
Bunto T.V., Kan Yu.S. Quantile Criterion-based Control of the Securities Portfolio
with a Nonzero Ruin Probability // Autom. Remote Control. 2013. V. 74. Nо. 5.
P. 811-828.
17.
Кибзун А.И., Игнатов А.Н. Двухшаговая задача формирования портфеля цен-
ных бумаг из двух рисковых активов по вероятностному критерию. // АиТ.
2015. № 7. С. 78-100.
Kibzun A.I., Ignatov A.N. The Two-Step Problem of Investment Portfolio Selection
from Two Risk Assets via the Probability Criterion // Autom. Remote Control. 2015.
V. 76. No. 7. P. 1201-1220.
22
18. Азанов В.М., Кан Ю.С. Синтез оптимальных стратегий в задачах управле-
ния стохастическими дискретными системами по критерию вероятности // АиТ.
2017. № 6. C. 57-83.
Azanov V.M., Kan Yu.S. Design of Optimal Strategies in the Problems of Discrete
System Control by the Probabilistic Criterion // Autom. Remote Control. 2017.
V. 78. No. 6. P. 1006-1027.
19. Кибзун А.И., Игнатов А.Н. Сведение двухшаговой задачи стохастического оп-
тимального управления с билинейной моделью к задаче смешанного целочис-
ленного линейного программирования // АиТ. 2016. № 12. С. 89-111.
Kibzun A.I., Ignatov A.N. Reduction of the Two-Step Problem of Stochastic Optimal
Control with Bilinear Model to the Problem of Mixed Integer Linear Programming //
Autom. Remote Control. 2016. V. 77. No. 12. P. 2175-2192.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 02.03.2020
После доработки 20.05.2020
Принята к публикации 09.07.2020
23