Автоматика и телемеханика, № 12, 2020
© 2020 г. А.В. БОРИСОВ, д-р физ.-мат. наук (ABorisov@frccsc.ru)
(Институт проблем информатики ФИЦ ИУ РАН, Москва;
Московский авиационный институт;
Центр фундаментальной и прикладной математики МГУ)
L1-ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ МАРКОВСКИХ
СКАЧКООБРАЗНЫХ ПРОЦЕССОВ II:
ЧИСЛЕННЫЙ АНАЛИЗ КОНКРЕТНЫХ СХЕМ1
Вторая часть статьи посвящена определению порядка точности раз-
личных численных схем реализации алгоритма фильтрации состояний
марковских скачкообразных процессов по косвенным наблюдениям в при-
сутствии винеровских шумов. Отдельно исследованы случаи аддитивных
и мультипликативных шумов в наблюдениях: показано, что одни и те же
схемы в этих случаях обеспечивают разную точность. Для наблюдений
с аддитивными шумами предложены схемы реализации порядка 12 , 1 и 2,
а для наблюдений с мультипликативными шумами порядка 1 и 2. Пред-
ставленные теоретические результаты проиллюстрированы численными
примерами.
Ключевые слова: марковский скачкообразный процесс, устойчивая оцен-
ка, оценка максимума апостериорной вероятности, схема численного ин-
тегрирования.
DOI: 10.31857/S0005231020120028
1. Введение
Данная статья является продолжением [1]. В первой части поставлена и
решена задача L1-оптимальной фильтрации состояний марковских скачко-
образных процессов (МСП) по непрерывным косвенным наблюдениям в при-
сутствии винеровских шумов. Представлены точное решение этой задачи,
а также класс алгоритмов его численной реализации. Точность вычисляе-
мых оценок зависит от порядка выбранной аналитической аппроксимации
и численной схемы ее реализации. В [1] представлены показатели точности
численных реализаций оценок и доказаны утверждения, их описывающие.
Целью второй части статьи является вычисление показателей точности
для аналитических аппроксимаций различного порядка и численных схем
их реализации. Показатели точности анализируются отдельно для случаев
наблюдений с аддитивными и мультипликативными шумами: в этих двух
случаях они различны.
Статья организована следующим образом. В разделе 2 сформулирована
задача L1-оптимальной фильтрации, ее теоретическое решение, представле-
ны аналитические аппроксимации и их численные реализации. Для точного
1 Работа выполнена при частичной поддержке Российского фонда фундаментальных
исследований, проект № 19-07-00187 А.
24
и приближенного решения предложены показатели близости и сформулиро-
ваны утверждения, их характеризующие.
В разделе 3 для случая наблюдений с аддитивными шумами рассмотрены
различные схемы численной реализации. В качестве численных реализаций
использовалась прямая дискретизация системы наблюдения, схемы ¾левых¿
и ¾средних¿ прямоугольников, а также квадратуры Гаусса. Использование
простых (несоставных) схем численного интегрирования позволило получить
аппроксимации оценок фильтрации порядка точности12 , 1 и 2.
Раздел 4 посвящен исследованию точности приближенных схем при филь-
трации состояний МСП по наблюдениям с мультипликативными шумами.
В качестве численных реализаций вновь выступали схема ¾средних¿ прямо-
угольников и схема средних 2-го порядка. Показано, что простые схемы не
могут быть использованы для построения аппроксимаций и следует исполь-
зовать соответствующие составные схемы с дополнительным дроблением об-
ласти интегрирования. В итоге получены численные алгоритмы фильтрации
общего порядка точности 1 и 2.
Раздел 5 содержит иллюстративные примеры применения различных чис-
ленных схем для фильтрации состояний МСП по наблюдениям с аддитивны-
ми и мультипликативными шумами. В разделе 6 представлены заключитель-
ные выводы и направления дальнейших исследований.
2. Необходимые сведения об аналитическом и
приближенном решении задачи фильтрации
На полном вероятностном пространстве с фильтрацией (ΩX × ΩW, FX × FW,
PX× PW , {FXt× FWt }t≥0) рассматривается стохастическая динамическая си-
стема
∫t
(2.1)
Xt = X0 + Λ⊤Xsds + µs,
0
∫tr
∫
tr
∑
(2.2)
Yr =
fXsds +
Xnsg1/2ndWs
,
r ∈ N,
n=1
tr-1
tr-1
где
(
)
Xt ≜ col
X1t,... ,XNt
∈ SN - ненаблюдаемое состояние системы, яв-
ляющееся однородным МСП с конечным множеством состояний SN ≜
≜ {e1, . . . , eN } (SN - множество единичных векторов евклидова простран-
ства RN ), матрицей интенсивностей переходов Λ и начальным распределе-
нием π;
µt ≜ col (µ1t,... ,µNt ) ∈ RN - FXt-согласованный мартингал;
Yr ≜ col (Y1r,... ,YMr ) ∈ RM - косвенные наблюдения, зашумленные Ft-со-
гласованным стандартным винеровским процессом Wt ≜ col (W1t, . . . , WMt ) ∈
∈ RM; f - матрица плана наблюдений, а набор невырожденных симметрич-
ных матриц {gn}n=1,N характеризует интенсивности шумов в зависимости от
25
текущего состояния Xt; наблюдения {Yr}r получены путем дискретизации по
времени с постоянным шагом h соответствующих непрерывных наблюдений.
Неубывающее семейство σ-алгебр, порожденное последовательностью
{Yr}r∈N, обозначено как Or ≜ σ{Yℓ : 0 ≤ ℓ ≤ r}, O0 ≜ {∅, Ω}.
Задача L1-оптимальной фильтрации состояния X по дискретным на-
блюдениям Y заключается в нахождении такой оценкиXr, r ∈ N состояния
МСП Xrh, что
{
}
(2.3)
Xr ∈ Argmin E
∥Xr - Xrh∥1 ,
Xr∈Xr
где Xr - множество всех таких Or-согласованных последовательностей {Xr}
с конечным первым моментом, что
∑̂Xn
r
≡1
с вероятностью 1.
n=1
Ниже в изложении будем использовать следующие обозначения:
{
}
∑
D ≜ u = col(u1,...,uN) : un ≥ 0,
un = h
- (N - 1)-мерный сим-
n=1
плекс в пространстве RM ;
{
}
∑
Π ≜ π = col(π1,...,πN) : πn ≥ 0,
πn = 1
- ¾вероятностный сим-
n=1
плекс¿, множество возможных начальных распределений МСП π;
NXr - случайное число скачков состояния Xt, произошедшее на отрезке
времени [tr-1, tr],
ρr,ℓ,q(du) - распределение вектора Xℓt
I{q}(NXr)τr при условии Xtr-1 =
r
= ek, т.е. для любого G ∈ B(RM) верно равенство
∫
{
}
E IG(τr)I{q}(NXr)Xℓ
|Xtr-1 = ek
= ρk,ℓ,qr(du);
tr
G
{
}
N(y, m, K) ≜ (2π)-M/2det-1/2K exp
-12∥y - m∥2K-1
- M-мерная плот-
ность гауссовского распределения с математическим ожиданием m и невы-
рожденной ковариационной матрицей K;
∥α∥2K ≜ α⊤Kα, 〈α, β〉K ≜ α⊤Kβ.
Решение задачи фильтрации выражается через условное распределе-
ние состояния МСП относительно доступных наблюдений xr ≜ E {Xtr |Or} и
совпадает с оценкой максимума апостериорной вероятности:
Xr = en∗ , где
n∗ ∈ Argmaxn=1,N xnr.
Условное распределение определяется рекуррентной процедурой
(
)
N
∑
∫
∑
xk
N Yr,fu,
upgp ρk,j,q(du)
r-1
q=0D
p=1
(2.4)
xjr =k=1
(
)
,
j = 1,N,
x0
= π.
∑
∑
∫
∑
xi
N Yr,fv,
vngn ρi,ℓ,c(dv)
r-1
i,ℓ=1
c=0D
n=1
26
Дробь в (2.4) содержит в числителе и знаменателе бесконечные суммы инте-
гралов, не вычисляемые аналитически. Для компьютерной реализации дан-
ная рекурсия должна быть преобразована. На первом шаге преобразования
оценка xr заменяется аналитической аппроксимацией порядка s: бесконеч-
ные суммы в числителе и знаменателе заменяются конечными, содержащими
только s + 1 слагаемых:
(
)
∑∫
∑
N xkr-1(s)
N Yr,fu, upgp ρk,j,q(du)
q=0D
p=1
(2.5)
xjr(s) =k=1
(
)
, j =1,N, x0
= π.
∑
∑
∫
∑
xir-1
(s)
N Yr,fv, vngn ρi,ℓ,c(dv)
i,ℓ=1
c=0D
n=1
Ограничение числа слагаемых означает, что в аппроксимации учитывается
возможность не более чем s скачков оцениваемого состояния X на интервале
дискретизации [tr-1, tr]. Рекурсия (2.5) представима в матричной форме
(
)-1
(2.6)
xr(s) =
1ξ⊤rxr-1(s)
ξ⊤rxr-1
(s),
где
∫
∑
∑
(2.7)
ξkjq ≜
NYq,fu, upgp ρk,j,m(du), ξq ≜ ∥ξkjq∥k,j=1,N.
m=0D
p=1
На втором шаге преобразования интегралы ξij (2.7) заменяются суммами
∑
∑
(2.8) ξij (y) ≈ ψij (y) ≜
Ny,fwℓ, wpgp̺ijℓ,
ψ(y) ≜ ∥ψij (y)∥i,j=1,N ,
ℓ
ℓ=1
p=1
{
}
определяемыми множеством пар (wℓ, ̺ijℓ )
. Здесь ̺ijℓ ≥ 0 (ℓ = 1, L) -
ℓ=1,L
веса:
∑∑
(2.9)
W≜
̺ijℓ
≤ 1,
j=1 ℓ=1
а wℓ ≜ col(w1ℓ,...,wNℓ ) ∈ D - точки. Аналогично матрицам ξq строятся их
аппроксимации ψq ≜ ∥ψij (Yq)∥i,j=1,N . В результате условное распределение xr
приближенно вычисляется с помощью рекуррентной процедуры
(
)-1
(2.10)
xr ≜
1ψ⊤r xr-1
ψ⊤rxr-1, r ≥ 1,
x0
= π.
Оценка xr называется численной реализацией аналитической аппроксима-
ции xr, соответствующей той или иной схеме численного интегрирования.
Оценки xr, xr и xr обладают свойством устойчивости [1]: их компоненты
почти наверное неотрицательны и нормированы.
27
Если λ ≜ maxn=1,N |λnn| и для схемы численного интегрирования верно
неравенство
∫
∑
(2.11)
max
|ψij (y) - ξij
(y)|dy ≤ δ,
i=1,N
j=1
RM
то расхождение xr и xr характеризуется неравенством
{
}
[ (
)r]
(λh)s+1
(2.12)
supE
∥xr - xr∥1
≤4 1-
1-
+ 2rWr-1
δ.
π∈Π
(s + 1)!
При фиксированном горизонте T и уменьшении шага дискретизации h → 0
это же неравенство приобретает асимптотический вид
(
)
{
}
(λh)s
δ
(2.13)
supE
∥xT/h - xT/h∥1
≤ 2T
2λ
+
π∈Π
(s + 1)!
h
Ниже исследуются аппроксимации порядка s = 1 и s = 2. Для них с помо-
щью обобщенной формулы полной вероятности легко получить вид интегра-
лов (2.7), используемых в дальнейшем изложении:
∫
∑
(
)
(2.14)
NYr,fu, upgpρk,j,0(du) = δkjeλkkhN Yr,hfk, hgk
,
p=1
D
∫
∑
(2.15)
NYr,fu, up
gp ρk,j,1
(du) =
p=1
D
h
∫
(
)
= (1 - δkj )λkjeλjj h e(λkk -λjj )uN Yr, ufk + (h - u)fj
, ugk + (h - u)gj du,
0
∫
∑
NYr,fu, upgp ρk,j,2(du) =
p=1
D
∫
h
∫
(2.16)
∑
=
λkiλijeλjjh
e(λkk-λii)u+(λii-λjj)v×
i:i=k,
i=j
0
0
(
)
× N Yr,ufk + vfi + (h - u - v)fj, ugk + vgi + (h - u - v)gj dvdu,
где fj - j-й столбец матрицы f.
В следующих разделах представлено исследование влияния точности раз-
личных схем вычисления интегралов в (2.15) и (2.16) на точность аппрокси-
мации решений задач фильтрации состояний МСП с аддитивными и мульти-
пликативными шумами в наблюдениях. Доказательства всех утверждений,
28
сформулированных ниже, характеризующих это влияние, базируются на ис-
пользовании неравенств (2.11), (2.13) и построены по единой схеме. На первом
шаге доказательства величина |ψij (y) - ξij (y)| оценивается сверху с исполь-
зованием известных границ ошибок численного интегрирования [2]. Обыч-
но эта оценка выражается через производные интеграндов. На втором шаге
строится оценка сверху для интеграла в левой части (2.11). Эта операция яв-
ляется нетривиальной, так как выполняется в предположении малости ша-
га h. Дело в том, что с уменьшением h как масштаба области интегрирова-
ния синхронно изменяется масштаб интеграндов, которые становятся близ-
ки к δ-функции Дирака. Данный факт соответствующим образом влияет и
на производные интеграндов. В итоге порядок малости интеграла в правой
части (2.11) оказывается ниже, чем порядок численной схемы [2] без усло-
вия асимптотической малости h. Основная проблема доказательств утверж-
дений ниже заключается в определении, насколько изменится этот порядок
малости.
3. Численные схемы фильтрации по наблюдениям
с аддитивными шумами
3.1. Случай s = 1: дискретизация стохастической дифференциальной
системы наблюдения и схема ¾левых прямоугольников¿
В данном подразделе демонстрируется связь алгоритма (2.10) приближен-
ной фильтрации состояния МСП по дискретизованным наблюдениям для слу-
чая s = 1 и алгоритма фильтрации состояний марковских цепей - процессов
с дискретным временем - по дискретным наблюдениям.
На (Ωx × Ωw, Fx × Fw, Px × Pw, {Fxr × Fwr}r∈Z+ ) рассмотрим стохастиче-
скую систему наблюдения с дискретным временем
xr=P⊤xr-1 + mr, r ∈ N, x0 ∼ π,
(3.1)
∑
yr =Fxr + xnrG1/2nwn.
n=1
Здесь
xr ≜ col(x1r,... ,xNr) - ненаблюдаемая однородная марковская цепь со
значениями в SN , с матрицей P переходных вероятностей на одном шаге и
начальным распределением π; {mr}r∈N - Fxr-согласованная мартингал-раз-
ность;
yr ≜ col (y1r,... ,yMr ) - наблюдаемая последовательность, F - матрица
плана наблюдения, а {Gn}n=1,N являются условными матрицами ковариаций
шумов в наблюдениях относительно текущего значения марковской цепи;
wr ≜ col(w1r,... ,wMr ) - Fwr-согласованный стандартный гауссовский дис-
кретный белый шум, не зависимый от {xr}, представляющий ошибки наблю-
дений.
Задача фильтрации цепи x по наблюдениям y заключается в вычислении
условного распределения xr ≜ E {xr|y1, . . . , yr}. Решение ее известно [3]: оно
29
определяется следующей рекуррентной схемой вида ¾прогноз-коррекция¿:
(3.2)
x0
= π - начальное условие,
(3.3)
xr = P⊤xr-1
– прогноз,
1
(3.4)
xr =
κr xr
– коррекция,
1κr xr
где
κr ≜ diag (N(y1,Fe1,G1),... ,N(yN ,FeN ,GN )) .
Вернемся к системе наблюдения (2.1), (2.2) на сетке с шагом h < λ-1 и
покажем, что на ней система может быть приближена некоторой системой с
дискретным временем (3.1). Уравнение динамики (2.1) может быть дискре-
тизовано точно: cогласно разложению Ито-Тейлора [4]
(3.5)
Xtr = exp(hΛ⊤)Xtr-1 + (µtr - µtr-1
),
где
exp(hΛ⊤) = I + hΛ⊤ + O(h2).
Из (2.2) также следует, что
∑
(3.6)
Ytr = hfXtr +
Xnt
g1/2n(Wtr - Wtr-1 ) + ϑr,
r
n=1
где стохастическая последовательность {ϑr} такова, что E {∥ϑr∥2} ≤ Ch3/2
для любого r ∈ N и некоторой константы C > 0. Формулы (3.5) и (3.6) пред-
ставляют схему временной дискретизации системы (2.1), (2.2), и к ней может
быть применим алгоритм фильтрации (3.2)-(3.4) со следующими значениями
параметров:
P = I + hΛ, F = hf, Gn = hgn, j = 1,N.
При этом рекурсия (3.3), (3.4) для данной системы записывается в форме
1
(3.7)
xr =
κr(I + hΛ⊤)xr-1,
1κr(I + hΛ⊤)xr-1
и ее можно рассматривать как один из видов численной схемы реализации
аппроксимации порядка s = 1: элементы матрицы ξ имеют вид
h
∫
(
)
(3.8)
ξkj(y) = δkjeλjjhN
y,hfj,hgj
+ (1 - δkj )λkjeλjj h Qkj
(y, u)du,
0
30
где
(
)
(3.9)
Qkj(y,u) ≜ e(λkk-λjj)uN y,ufk + (h - u)fj, ugk + (h - u)gj
В рекуррентной процедуре (3.7) элементы ξkj аппроксимированы функциями
(
)
(3.10)
ψkj(y) = (δkj + hλkj)N
y,hfj,hgj
Следующее утверждение определяет показатель точности численной схе-
мы (3.7).
Лемма 1. В случае фильтрации состояний МСП по наблюдениям с ад-
дитивными шумами схема (3.7) обеспечивает глобальный порядок точно-
сти12, т.е. для любого T > 0 при достаточно малом шаге h > 0
{
}
(3.11)
sup E
∥xT/h - xT/h∥1
≤CTh2
π∈Π
для некоторой константы C > 0.
Доказательство леммы 1 дано в Приложении. Предложенная реализация ал-
горитма фильтрации при выбранном порядке аналитической аппроксимации
s = 1 имеет результирующий порядок точности 12 из-за неэффективного вы-
бора схемы численного интегрирования. Лемма 1 также позволяет получить
следствие, согласно которому использование схемы ¾левых¿ прямоугольни-
ков для численного интегрирования сохранит результирующий порядок точ-
ности на уровне12 .
Аппроксимируем интеграл (2.15) по отрезку [0, h] одноточечной схемой
(2.8), используя значение интегранда N(·) в левой точке, беря его с весом ̺kj
(k = j):
eλjjh -eλkkh
λkj
, если λjj = λkk,
(3.12)
̺kj ≜
λjj - λkk
hλkj eλjj h,
если λjj = λkk.
При этом схема ¾левых¿ прямоугольников вычисления интегралов в рекур-
сии (2.10) примет вид
(
)
(
)
(3.13)
ψkj(y) = δkjeλjjhN
y,hfj,hgj
+ (1 - δkj )̺kjN
y,hfj,hgj
Следствие 1. В случае фильтрации состояний МСП по наблюдениям
с аддитивными шумами схема ¾левых¿ прямоугольников в рекурсии (2.10)
обеспечивает глобальный порядок точности12.
Доказательство следствия 1 приведено в Приложении.
3.2. Случай s = 1: простая схема ¾средних¿ прямоугольников
Вычислим ψkj (y) по формуле ¾средних¿ прямоугольников:
(
)
ψkj(y) = δkjeλjjhN
y,hfj,hgj
+
(
)
(3.14)
)h
)
(λkk+λjj
h(
h
+ (1 - δkj)λkjhe
2
N y,
fk + fj
,
(gk + gj )
2
2
31
Лемма 2. В случае фильтрации состояний МСП по наблюдениям с адди-
тивными шумами схема (3.14) в рекурсии (2.10) обеспечивает глобальный
порядок точности 1, т.е. для любого T > 0 при достаточно малом шаге
h>0
{
}
(3.15)
sup E
∥xT/h - xT/h∥1
≤CTh1
π∈Π
для некоторой константы C > 0.
Доказательство леммы 2 дано в Приложении.
Таким образом, заменой схемы численного интегрирования без увеличе-
ния вычислительных затрат возможно повысить общий порядок точности до
первого. Дальнейшая фиксация порядка s = 1 и использование более точных
методов численного интегрирования не приведет к значительному уточне-
нию оценок, так как в суммарной погрешности основную роль будет играть
ошибка аналитической аппроксимации, а не численного интегрирования. Для
увеличения общей точности следует увеличить порядок аналитической ап-
проксимации до второго.
3.3. Случай s = 2: квадратуры Гаусса
Формулы (2.14)-(2.16) для s = 2 позволяют получить вид функций ξkj:
h
∫
(
)
ξkj(y) = δkjeλjj hN
y,hfj,hgj
+ (1 - δkj)λkj eλjj h Qkj(y, u)du +
0
(3.16)
∫
h
∫
∑
+
λkiλijeλjj h
Rkij(y,u,v)dvdu,
i:i=k, i=j
0
0
где функция Qkj(y, u) определена формулой (3.9) и
Rkij(y, u, v) ≜ e(λkk-λii)u+(λii-λjj)v ×
(3.17)
(
)
× N y,ufk + vfi + (h-u-v)fj, ugk + vgi +(h - u - v)gj
Для вычисления одномерного интеграла в (3.16) будем использовать двухто-
чечную квадратуру Гаусса
h
∫
(
)
e(λkk-λjj)uN y,ufk + (h - u)fj,y,ugk + (h - u)gj du =
0
[
√
(
√
√
√
√
)
h
√
3-1)h
(
3 - 1)h
(
3 + 1)h
(
3 - 1)h
(
3 + 1)h
=
e(λkk-λjj)(
2
3
N y,
√
fk +
√
fj,
√
gk +
√
gj
+
2
2
3
2
3
2
3
2
3
√
(
√
√
√
√
)]
(
√
3+1)h
(
3+1)h
(
3-1)h
(
3+1)h
(
3-1)h
+e(λkk-λjj)
2
3
N y,
√
fk +
√
fj,
√
gk +
√
gj
+ ǫ1(y),
2
3
2
3
2
3
2
3
32
для повторного интеграла - трехточечную:
∫
h
∫
(
)
e(λkk-λii)u+(λii-λjj)vN y, ufk +vfi +(h-u-v)fj, ugk + vgi + (h - u - v)gj dvdu =
0
0
[
(
)
2
h
h
h
h
2h
h
h
2h
+(λii-λjj )h
=
e(λkk-λii)
6
6N y,
fk +
fi +
fj,
gk +
gi +
gj
+
6
6
6
3
6
6
3
(
)
h
2h
h
h
2h
h
+(λii-λjj )h
+e(λkk-λii)
3
6N y,
fk +
fi +
fj,
gk +
gi +
gj
+
6
3
6
6
3
6
(
)]
2h
h
h
2h
h
h
+e(λkk-λii)6+(λii-λjj)
3 N y,
fk +
fi +
fj,
gk +
gi +
gj
+ ǫ2(y),
3
6
6
3
6
6
где ǫ1(y) и ǫ2(y) - ошибки интегрирования. Таким образом, интегралы в ре-
курсии (2.10)) вычисляются с помощью следующей схемы:
(
)
λjjh
λkjhe
(3.18)
ψkj(y) = δkjeλjjhN
y,hfj,hgj
+ (1 - δkj)
×
2
[
(
√
√
√
√
)
√
(
√
3-1)h
(
3-1)h
(
3+1)h
(
3-1)h
(
3+1)h
× e(λkk-λjj)
2
3
N y,
√
fk +
√
fj,
√
gk +
√
gj
+
2
3
2
3
2
3
2
3
(
√
√
√
√
)]
√
(
√
3+1)h
(
3+1)h
(
3-1)h
(
3+1)h
(
3-1)h
+e(λkk-λjj)
2
3
N y,
√
fk +
√
fj,
√
gk +
√
gj
+
2
3
2
3
2
3
2
3
[
(
)
∑
λkiλijh2eλjjh
h
h
2h h
h
2h
+
e(λkk-λii)6+(λii-λjj)6 N y,
fk +
fi +
fj,
gk +
gi +
gj
+
6
6
6
3
6
6
3
i:i=k, i=j
(
)
h
2h
h
h
2h
h
+(λii-λjj )h
+e(λkk-λii)
3
6N y,
fk +
fi +
fj,
gk +
gi +
gj
+
6
3
6
6
3
6
(
)]
2h
h
h
2h
h
h
+e(λkk-λii)6+(λii-λjj)
3 N y,
fk +
fi +
fj,
gk +
gi +
gj
3
6
6
3
6
6
Лемма 3. В случае фильтрации состояний МСП по наблюдениям с адди-
тивными шумами cхема (3.18) в рекурсии (2.10) обеспечивает глобальный
порядок точности 2, т.е. для любого T > 0 при достаточно малом шаге
h>0
{
}
(3.19)
sup E
∥xT/h - xT/h∥1
≤CTh2
π∈Π
для некоторой константы C > 0.
Доказательство леммы 3 дано в Приложении. Сравнивая схемы (3.14) и (3.18)
можно сделать вывод, что увеличивая число операций в схеме примерно в
N (N - 1) раз удается повысить общий порядок точности аппроксимации до
второго.
33
4. Численные схемы фильтрации по наблюдениям
с мультипликативными шумами
Для простоты сравнения точности различных численных схем будем счи-
тать, что в (2.1), (2.2) f = 0, т.е. аддитивный полезный сигнал полностью
отсутствует, и все матрицы {gn}n=1,N различны. Будет исследована точность
тех же численных реализаций алгоритма фильтрации, которые исследова-
лись в предыдущем разделе. Поэтому выполнение условия (2.9) ниже в дан-
ном разделе уже не проверяется.
Если все матрицы интенсивности шумов в наблюдениях различны, то
оценка оптимальной фильтрации почти наверное совпадает с оцениваемым
состоянием [6]. Несмотря на это многообещающее свойство, в разделе будет
показано, что системы наблюдения с мультипликативными шумами обладают
худшими свойствами для численной реализации, нежели системы с аддитив-
ными шумами. Это означает, что одна и та же численная схема, примененная
для фильтрации состояний по наблюдениям с мультипликативными шумами,
позволяет получить менее точные оценки, чем при фильтрации состояний по
наблюдениям с аддитивными шумами.
4.1. Случай s = 1: составная схема ¾средних¿ прямоугольников
Рассмотрим аналитическую аппроксимацию xr(1), определенную (3.8), и
ее аппроксимацию составной схемой ¾средних¿ прямоугольников с шагом
дискретизации h1+α, α ≥ 0:
(
)
ψkj(y) = δkjeλjj hN
y,hfj,hgj
+
(4.1)
[h-α]∑
(
(
))
1
+ (1 - δkj )λkjh1+α
Qkj y,h1+α i -
2
i=1
Легко проверить, что при α = 1 последняя формула представляет простую
схему ¾средних¿ прямоугольников.
Лемма 4. В случае фильтрации состояний МСП по наблюдениям с
мультипликативными шумами схема (4.1) в рекурсии (2.10) обеспечива-
ет глобальный порядок точности p = min(1,2α), т.е. для любого T > 0 при
достаточно малом шаге h > 0
{
}
(4.2)
sup E
∥xT/h - xT/h∥1
≤CThp
π∈Π
для некоторой константы C > 0.
Доказательство леммы 4 дано в Приложении. Из него следует, что точности
простого метода ¾средних¿ прямоугольников недостаточно для построения
численного алгоритма фильтрации любого положительного порядка точно-
сти. Какая-либо замена этой схемы на другую несоставную (например, на
схему Симпсона, квадратуры Гаусса и пр.) к улучшению не приведут. При-
чиной этому является алгебраическая связь между порядком производной и
34
степенью h в оценке ошибки интеграла по остатку ряда Тейлора. Из лем-
мы также можно заключить, что при s = 1 рациональным выбором порядка
шага дробления является α =12 .
4.2. Случай s = 2: составная схема средних
Результаты леммы 4 позволяют построить аппроксимацию элементов ξkj
(3.16) порядка s = 2, вычисляя как одномерные, так и двумерные интегралы
с помощью составной схемы средних с шагом h2:
(
)
ψkj(y) = δkjeλjjhN
y,hfj,hgj
+
[h-1]∑
(
)
1
+ (1 - δkj)λkjh2
Qkj y,h2(i -
)
+
2
(4.3)
i=1
[h-1]∑[h-1]-n∑
( (
)
(
))
4
∑
h
2
2
λjjh
+
λkiλij
e
Rkij y,h2 n -
,h2
m-
2
3
3
i:i=k,
n=1
m=1
i=j
Следствие 2. В случае фильтрации состояний МСП по наблюдениям
с мультипликативными шумами схема (4.3) в рекурсии (2.10) обеспечива-
ет глобальный порядок точности 2, т.е. для любого T > 0 при достаточно
малом шаге h > 0
{
}
(4.4)
sup E
∥xT/h - xT/h∥1
≤CTh2
π∈Π
для некоторой константы C > 0.
Доказательство следствия 2 приведено в Приложении.
5. Численные примеры
Численное сравнение точности представленных выше методов являет-
ся нетривиальной задачей из-за сложности подбора подходящего примера.
Во-первых, разница в точности, обеспечиваемой различными схемами, будет
мала в случае, когда столбцы fn или матрицы gn для разных значений n
близки по значению между собой. Во-вторых, доказанные в [1] утвержде-
ния о порядке точности носят асимптотический характер при h → 0: выбор
слишком малого шага дискретизации может привести к тому, что вероят-
ность превышения числом скачков состояния на отрезке дискретизации еди-
ницы окажется столь незначительной, что численные реализации высокого
порядка будут практически не отличимы по точности от численных реализа-
ций первого порядка. Наконец, в-третьих, характеристики точности того или
иного метода приходится вычислять методом Монте-Карло, что приводит к
необходимости моделирования пучков траекторий и оценок очень большого
объема для визуального ¾разделения¿ этих характеристик.
35
5.1. Сравнительный анализ схем фильтрации по наблюдениям
с аддитивными шумами
Для сравнительного анализа различных численных реализаций алгоритма
фильтрации использовалась система наблюдения (2.1), (2.2) со следующими
характеристиками: t ∈ [0, 1], N = 3, h = 0,01,
-10,0
2,0
8,0
0,333
Λ=
8,0
-10,0
2,0
,π= 0,333
,
2,0
8,0
-10,0
0,334
0,0
f = -50,0
,g1 = g2 = g3 = 1,
50,0
объем пучка траекторий для метода Монте-Карло S = 100000.
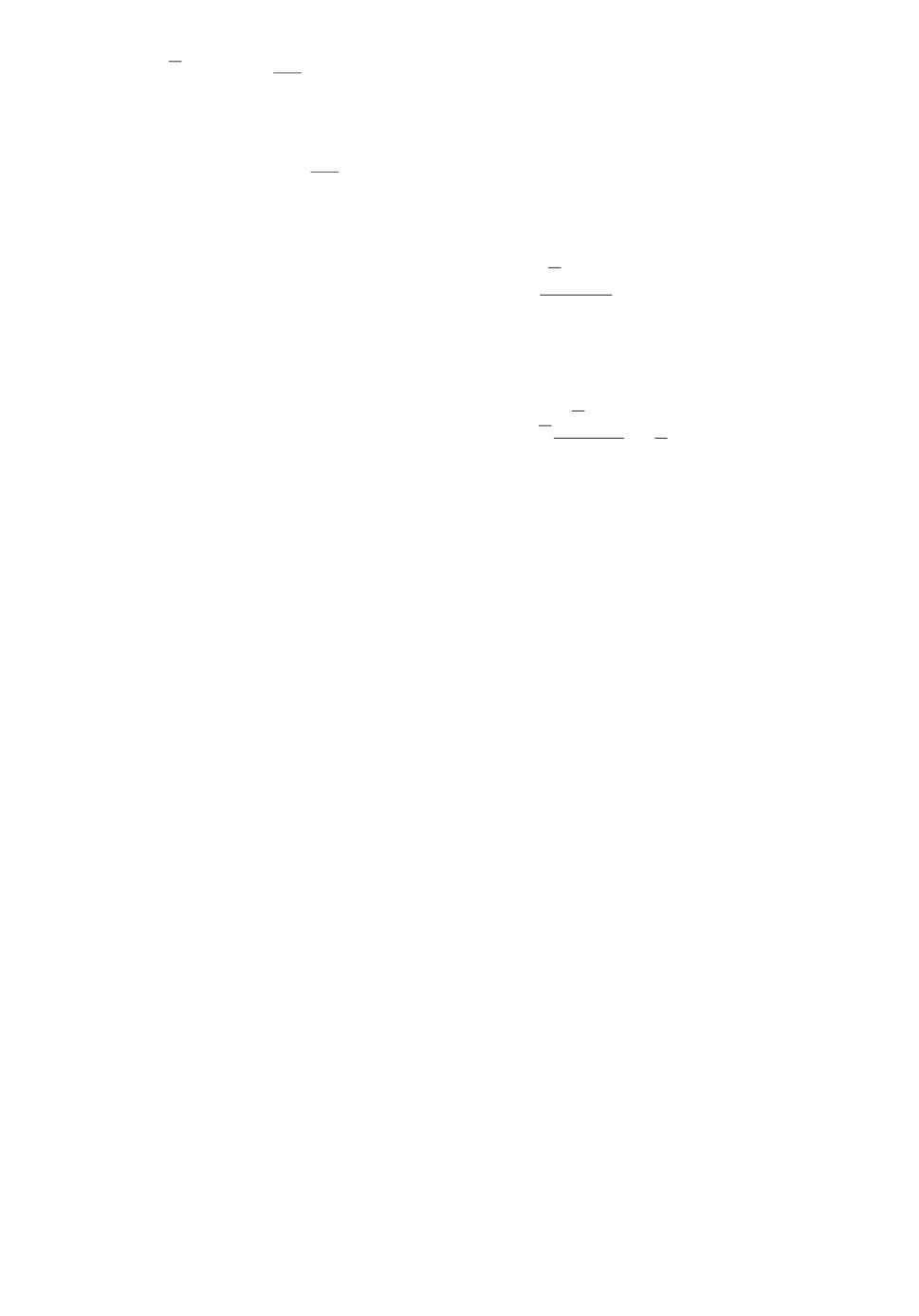
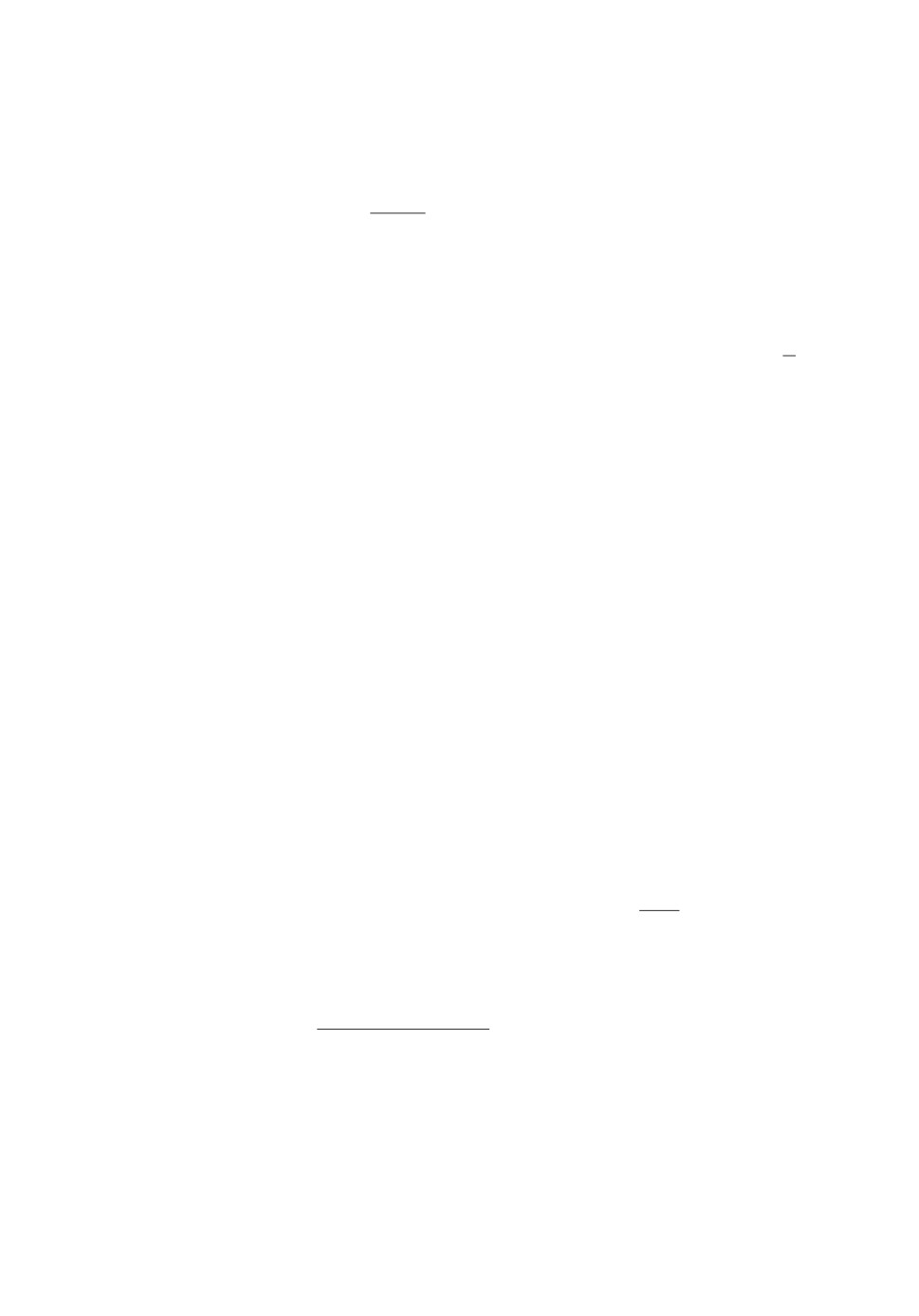
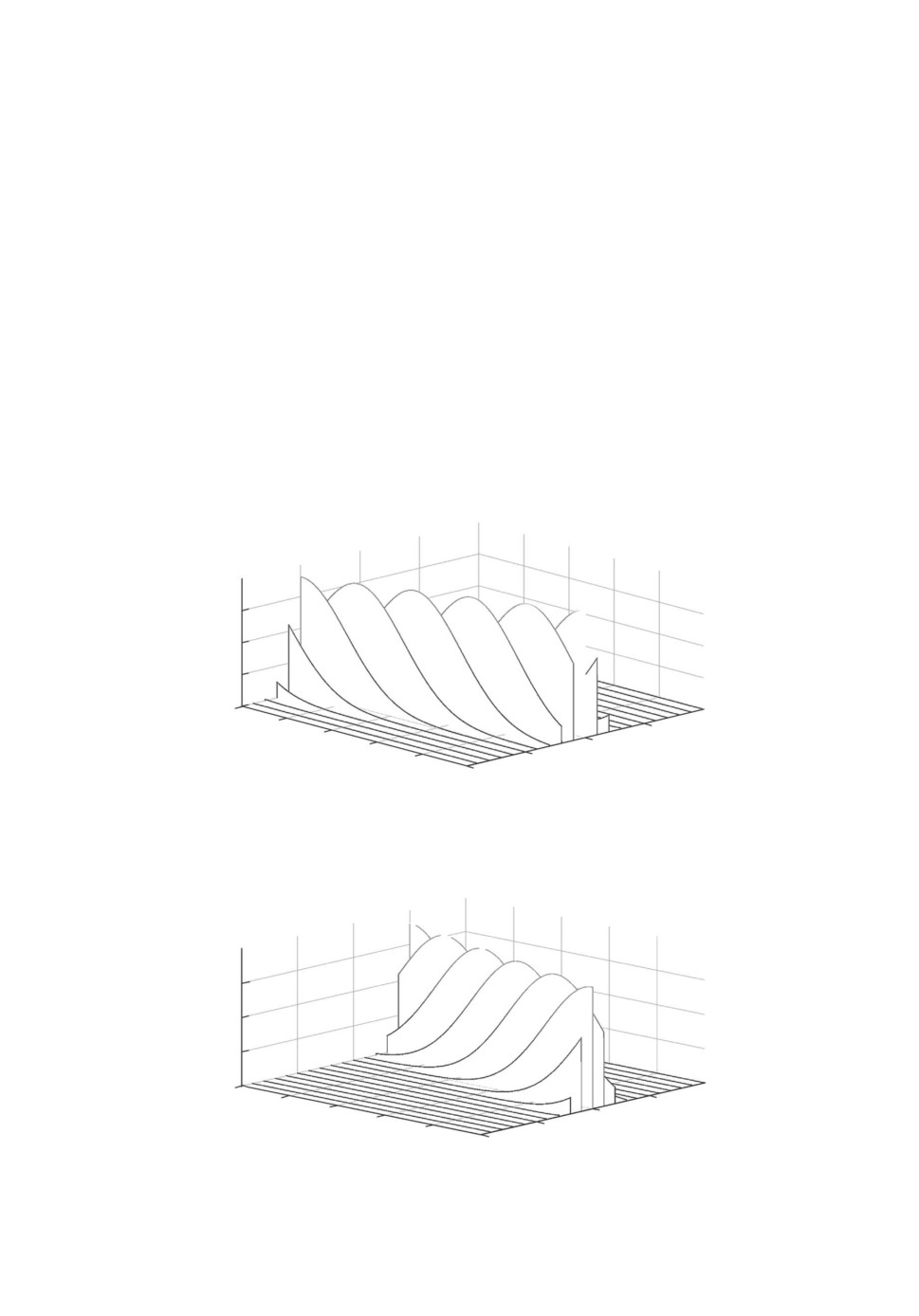
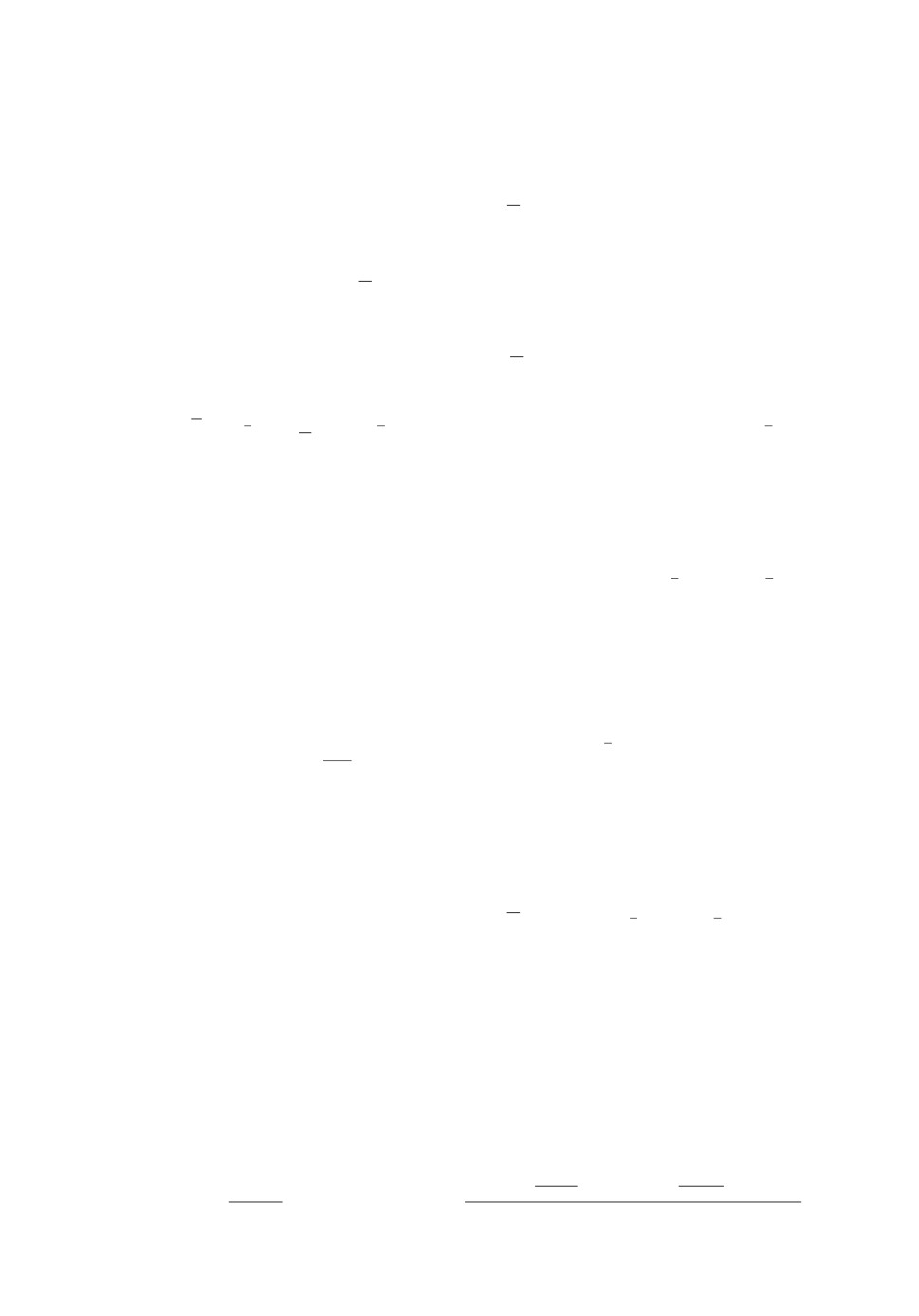
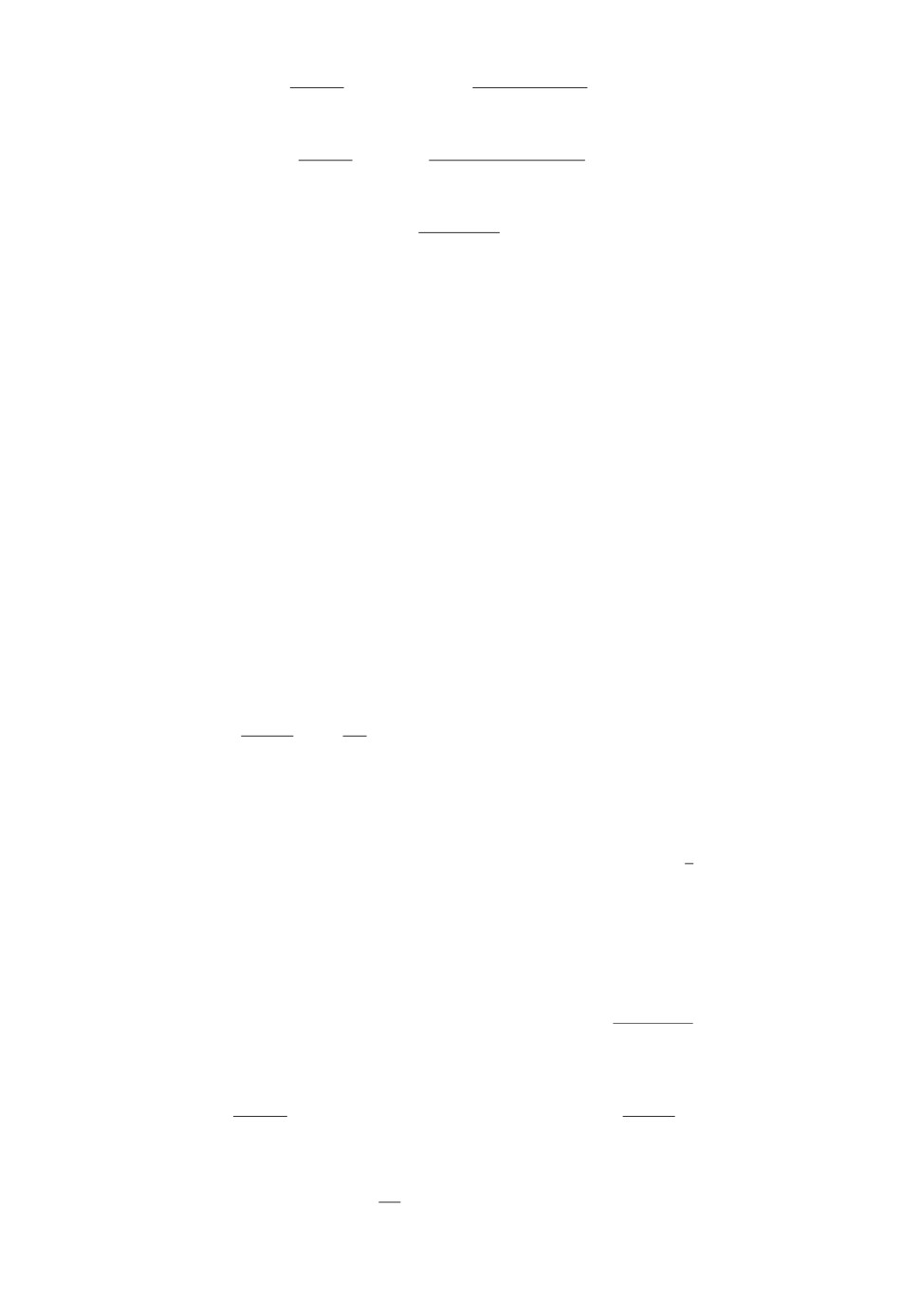
На рис. 1 и 2 представлены графики Q1,2(y, u) и Q1,3(y, u) интеграндов
в (2.15) как функций аргумента u для некоторых фиксированных значений y.
´10-4
Q1,2(y, u)
1,5
1,0
0,5
0
y
0,002
0,5
0,004
0
0,006
0,008
-0,5
u
-1,0
Рис. 1. Графики функции Q1,2(y, u) при некоторых фиксированных y: адди-
тивные шумы в наблюдениях.
´10-4
Q1,3(y, u)
1,5
1,0
0,5
0
y
0,002
0,5
0,004
0
0,006
0,008
-0,5
u
-1,0
Рис. 2. Графики функции Q1,3(y, u) при некоторых фиксированных y: адди-
тивные шумы в наблюдениях.
36
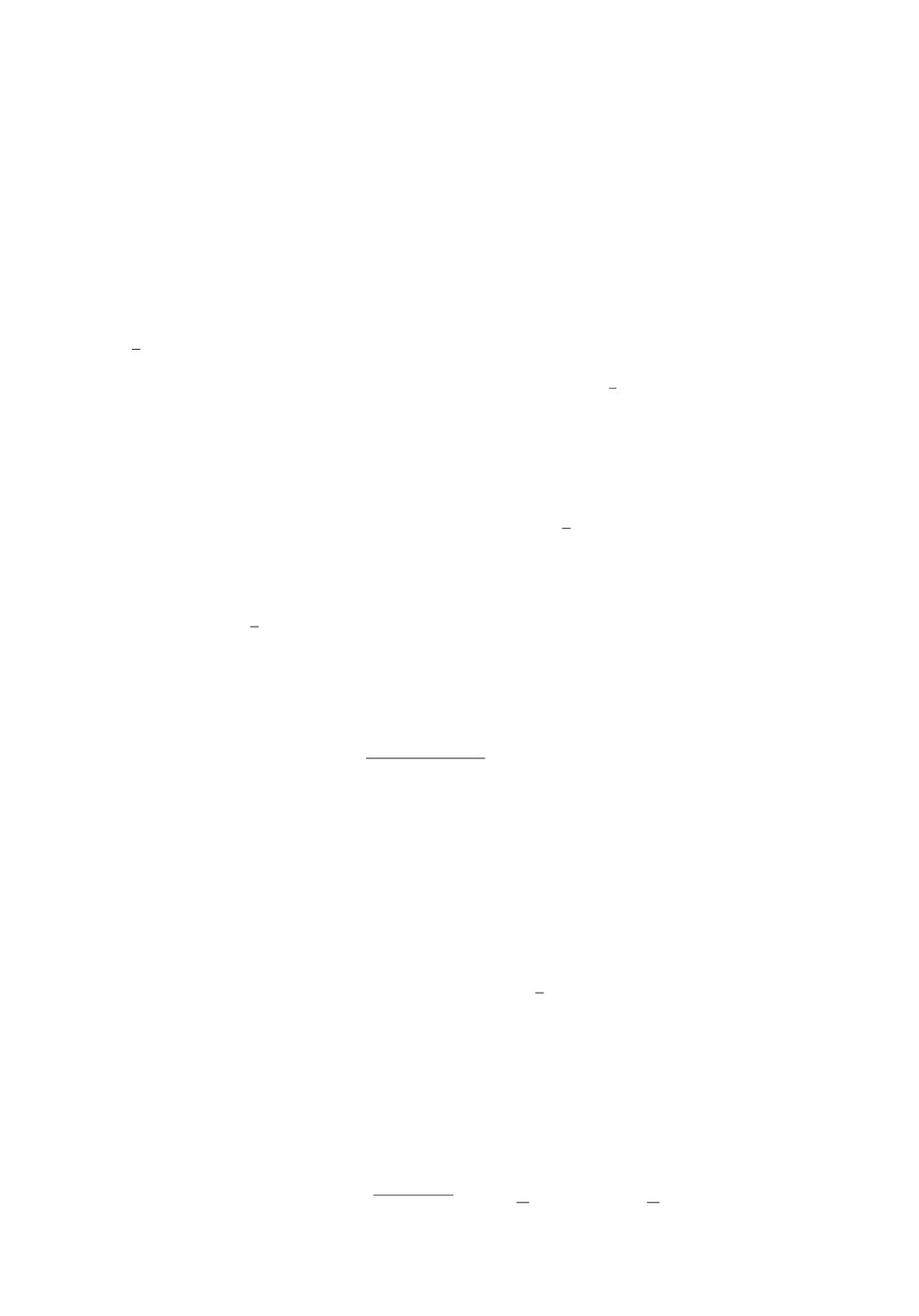
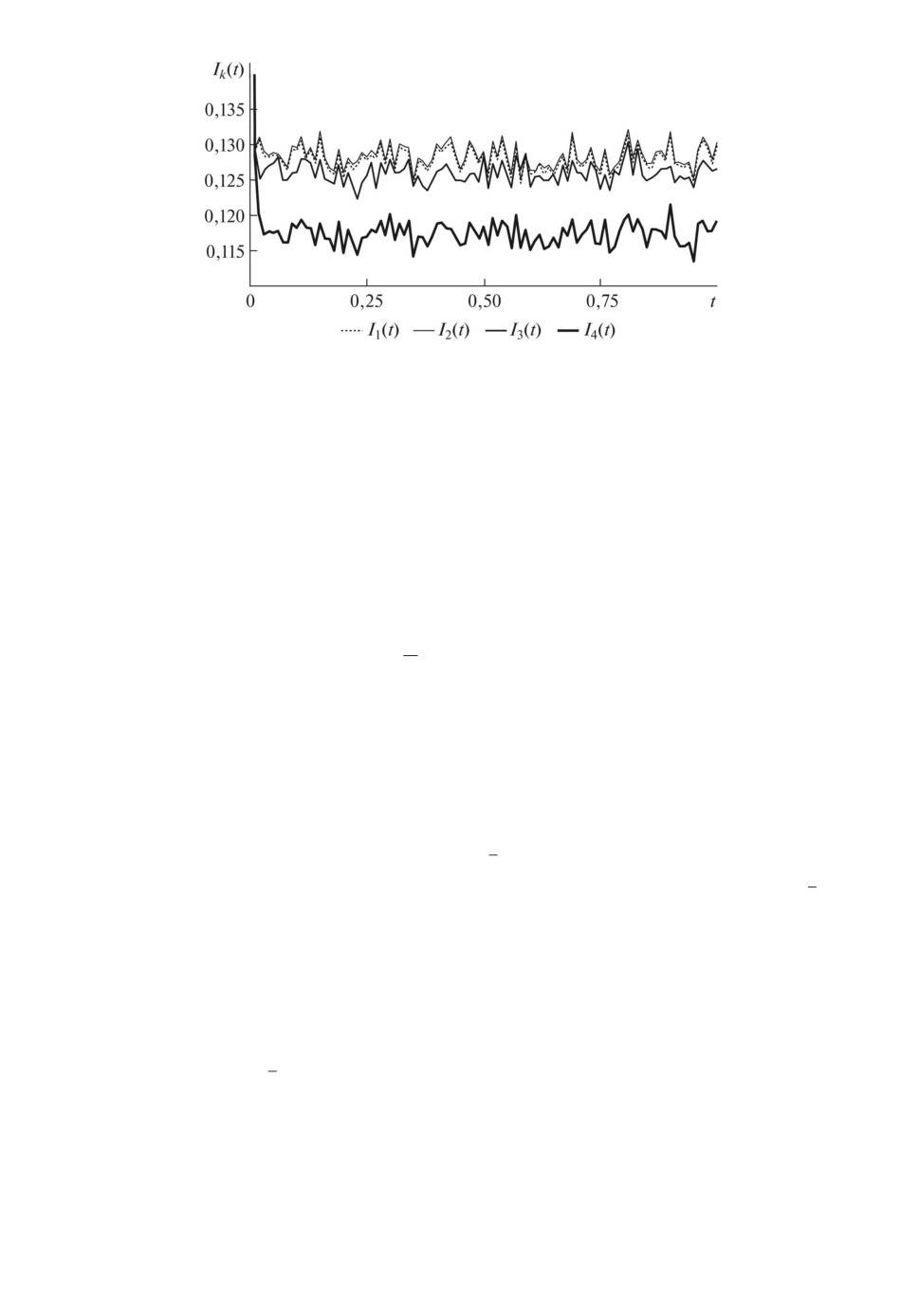
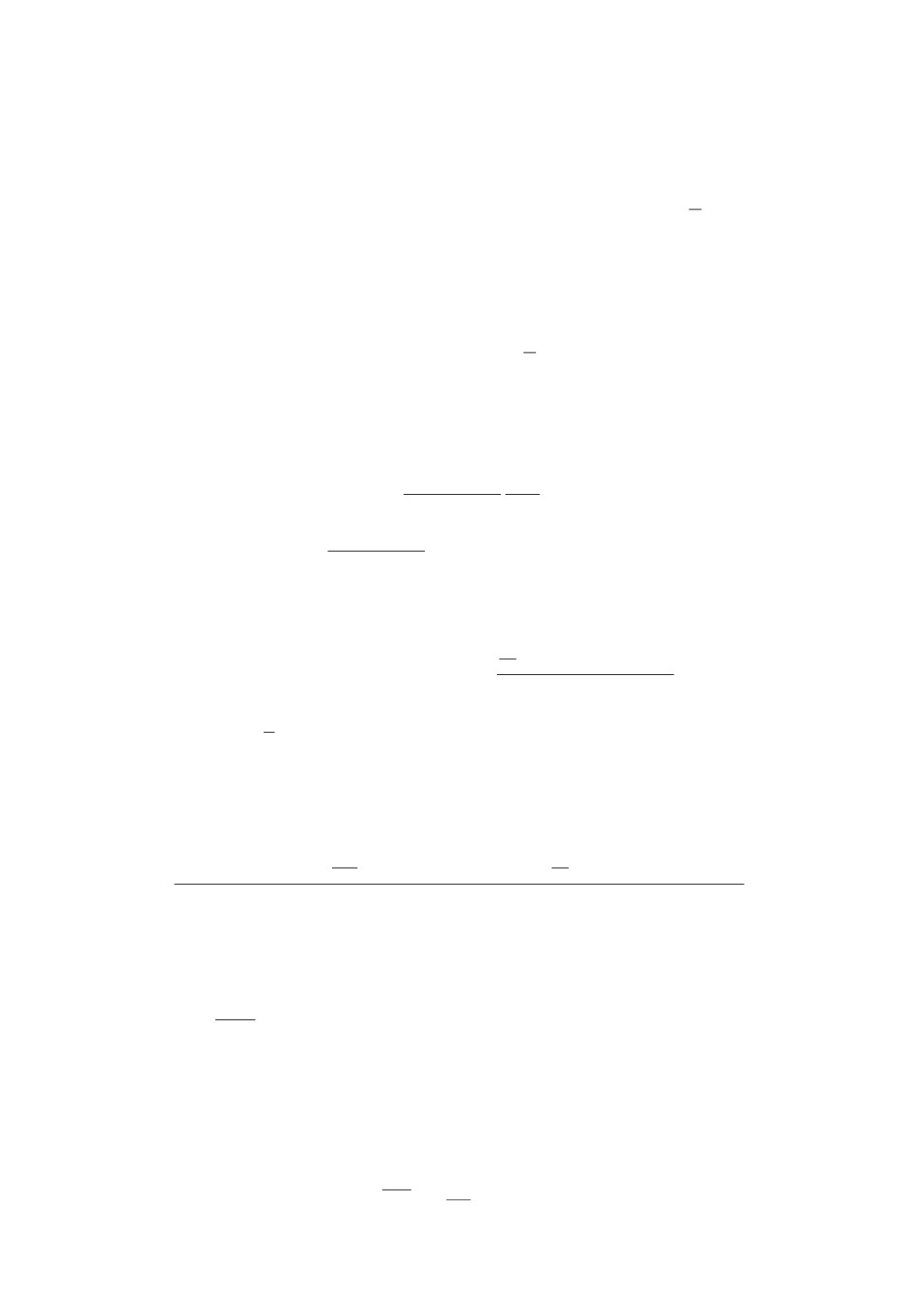
Рис. 3. Критерий точности при использовании различных схем численной ре-
ализации: аддитивные шумы в наблюдениях.
С помощью метода имитационного моделирования по пучку траекторий
были вычислены выборочные значения критерия качества
{
}
I(t) ≜ E
∥Xt - Xt∥1
для различных численных реализаций аналитических аппроксимаций:
∑
1
Ik(t) ≜
∥Xs,kt - Xst∥1,
S
s=1
где Xst - значение s-й траектории состояния в момент времени t,Xs,kt - значе-
ние s-й траектории аппроксимации оценки, полученной применением k-й схе-
мы реализации, в момент времени t. В данном эксперименте были вычислены
характеристики точности следующих схем:
I1(t) - простая схема дискретизации стохастической дифференциальной
системы наблюдения (порядок точности12 ),
I2(t) - простая схема ¾левых¿ прямоугольников (порядок точности12),
I3(t) - простая схема ¾средних¿ прямоугольников (порядок точности 1),
I4(t) - простая схема квадратур Гаусса (порядок точности 2).
Их графики представлены на рис. 3. Полученные результаты вполне соответ-
ствуют теоретическим выкладкам. Характеристики I1(t) и I2(t) сопоставимы
между собой, так как соответствуют численным реализациям одного поряд-
ка точности. Характеристика I3(t) меньше I1(t) и I2(t), так как порядок ее
точности выше на12 . Характеристика I4(t) значительно меньше I3(t), так как
порядок ее точности выше на 1.
Примечательно, что для порядка s = 1 был проведен дополнительный рас-
чет с использованием схемы адаптивного вычисления интеграла (2.15). Ре-
зультат ее использования оказался визуально не отличимым от результата
метода ¾средних¿ прямоугольников. При этом время вычисления оценок с
использованием схемы адаптивного интегрирования значительно возросло.
37
5.2. Сравнительный анализ схем фильтрации по наблюдениям
с мультипликативными шумами
Для сравнительного анализа различных численных реализаций алгоритма
фильтрации использовалась система наблюдения (2.1), (2.2) со следующими
характеристиками:
-10,0
2,0
8,0
t ∈ [0,1], N = 3, h = 0,05, Λ =
8,0
-10,0
2,0
,
2,0
8,0
-10,0
0,333
0,0
g1 = 1,0,
π = 0,333
,f= 0,0
,
g2 = 2,0,
0,334
0,0
g3 = 3,0,
объем пучка траекторий для метода Монте-Карло 100000.
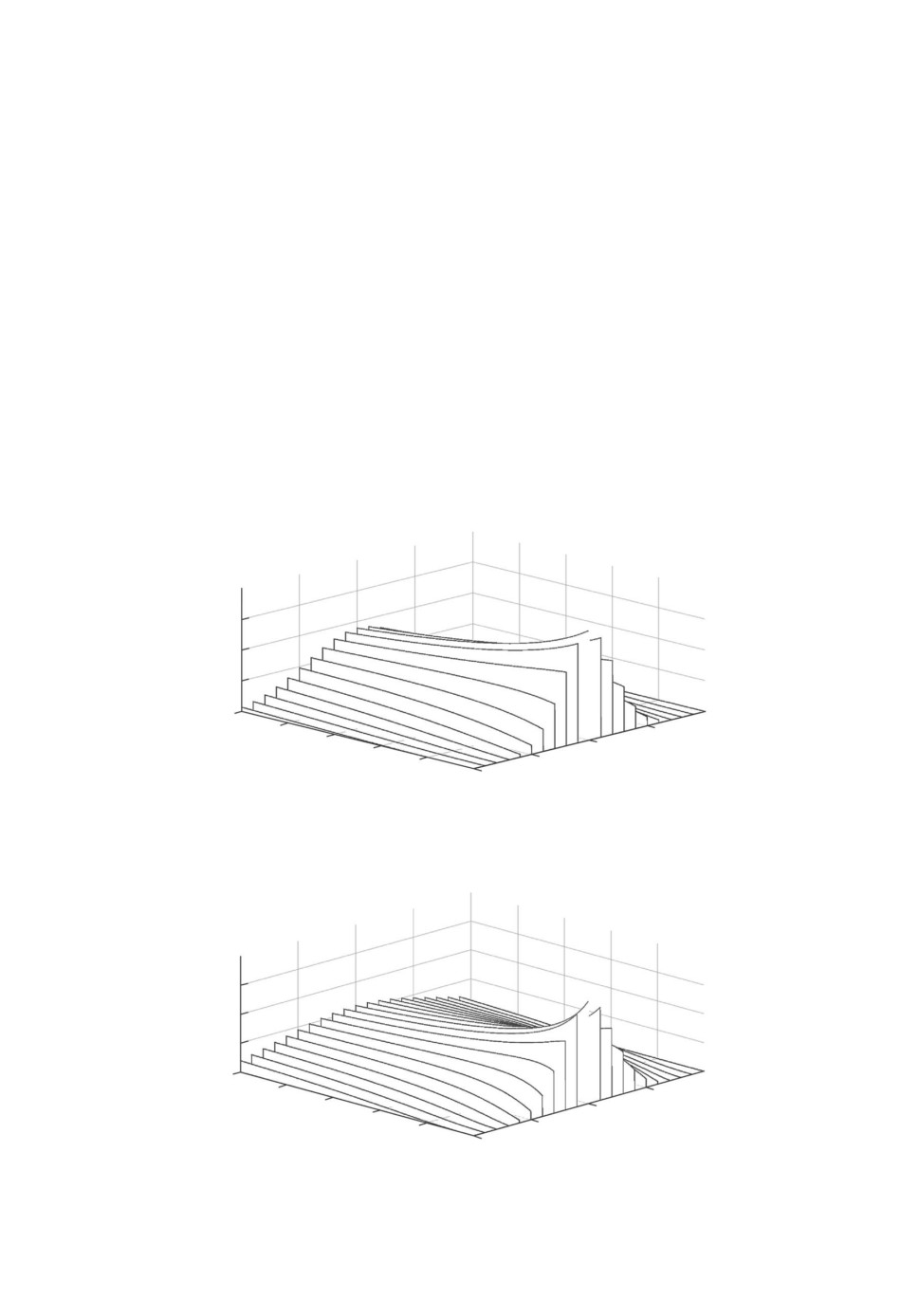
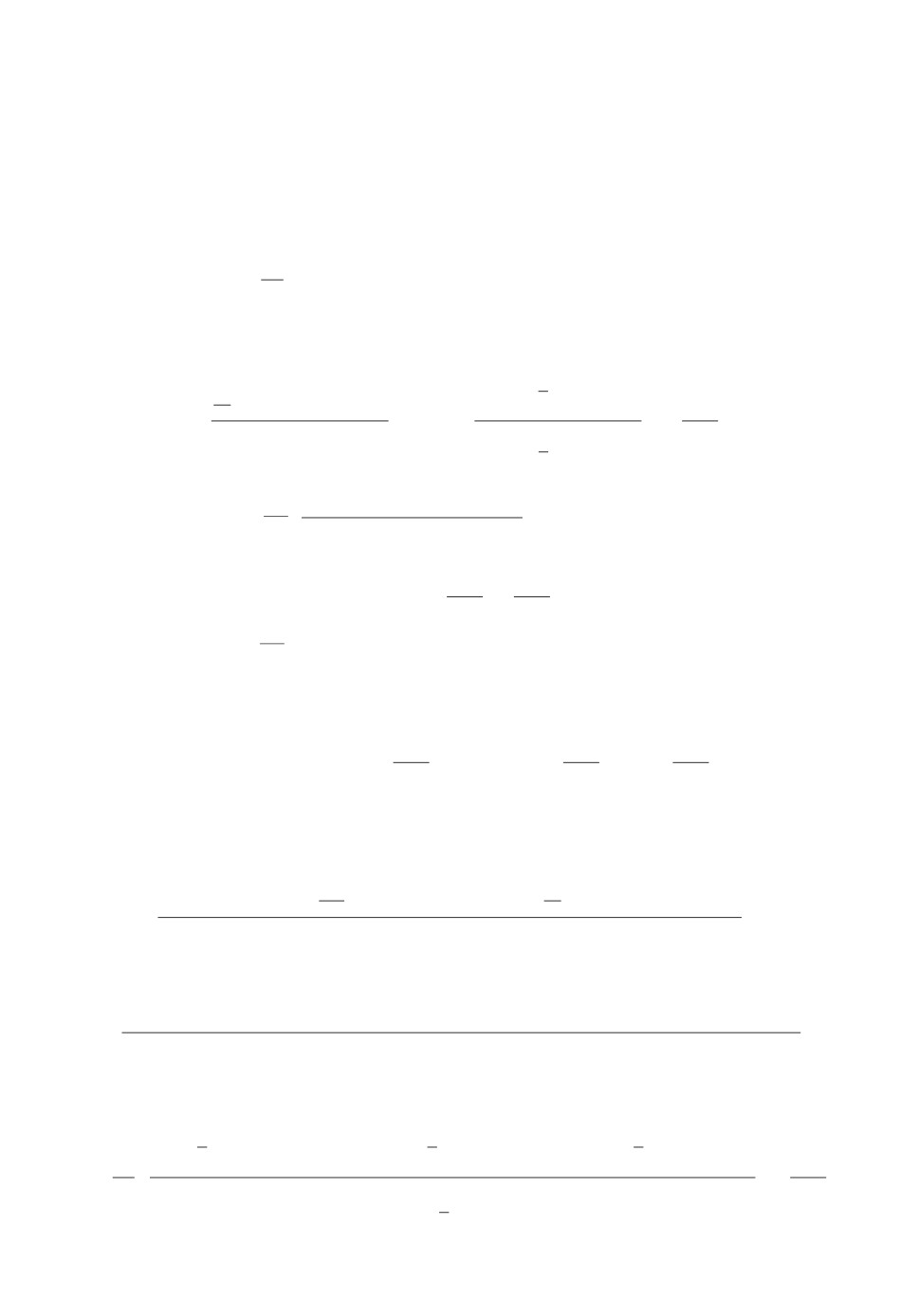
На рис. 4 и 5 представлены графики Q1,2(y, u) и Q1,3(y, u) интеграндов в
(2.15) как функций аргумента u для некоторых фиксированных значений y.
Q12(y, u)
1,5
1,0
0,5
0
y
0,01
0,5
0,02
0
0,03
0,04
-0,5
u
-1,0
Рис. 4. Графики функции Q1,2(y, u) при некоторых фиксированных y: муль-
типликативные шумы в наблюдениях.
Q13(y, u)
1,5
1,0
0,5
0
y
0,01
0,5
0,02
0
0,03
-0,5
0,04
u
-1,0
Рис. 5. Графики функции Q1,3(y, u) при некоторых фиксированных y муль-
типликативные шумы в наблюдениях.
38
Ik(t)
I5(t)
I6(t)
1,065
1,060
1,055
0
0,25
0,50
0,75
t
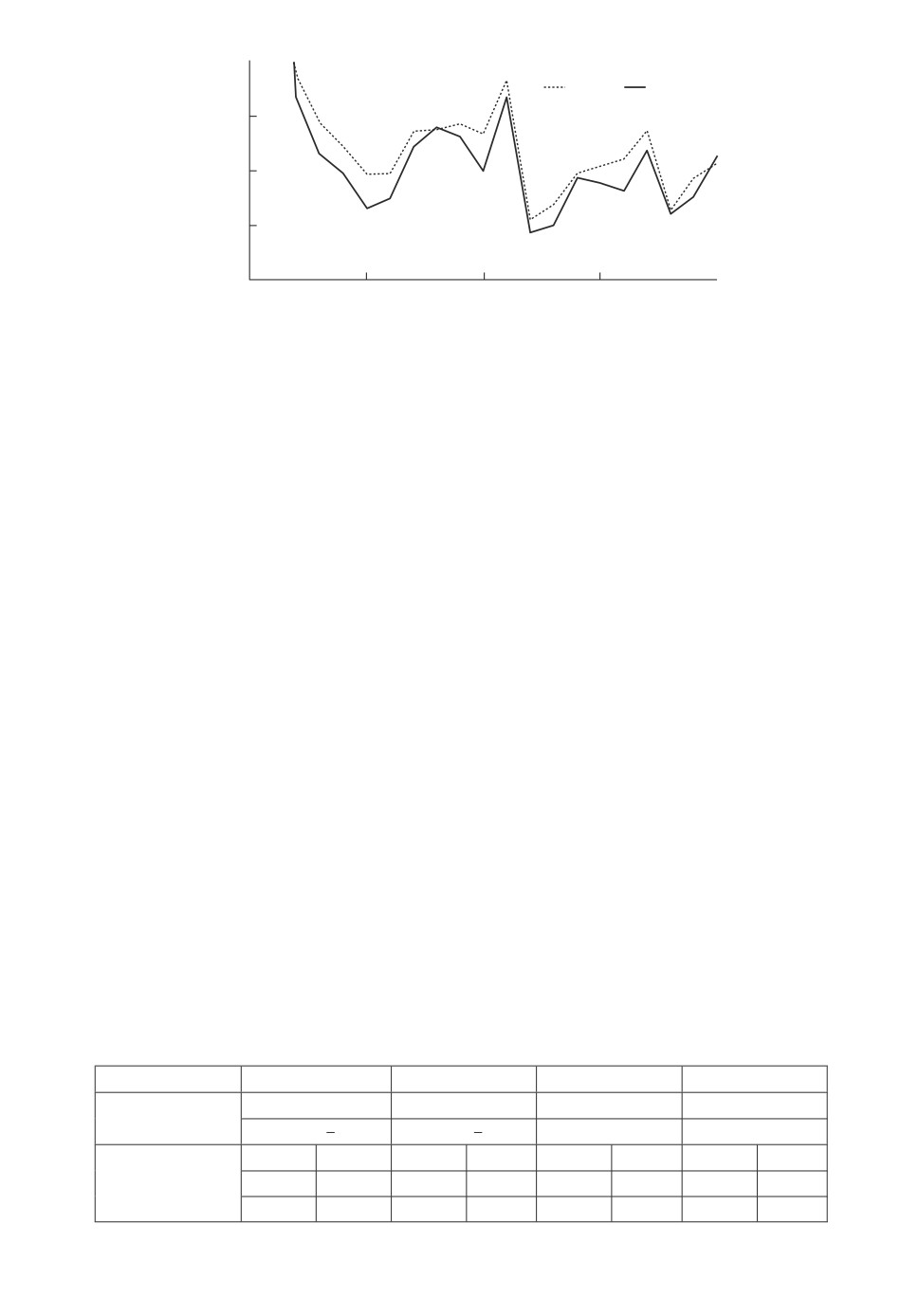
Рис. 6. Критерий точности при использовании различных схем численной реа-
лизации: мультипликативные шумы в наблюдениях.
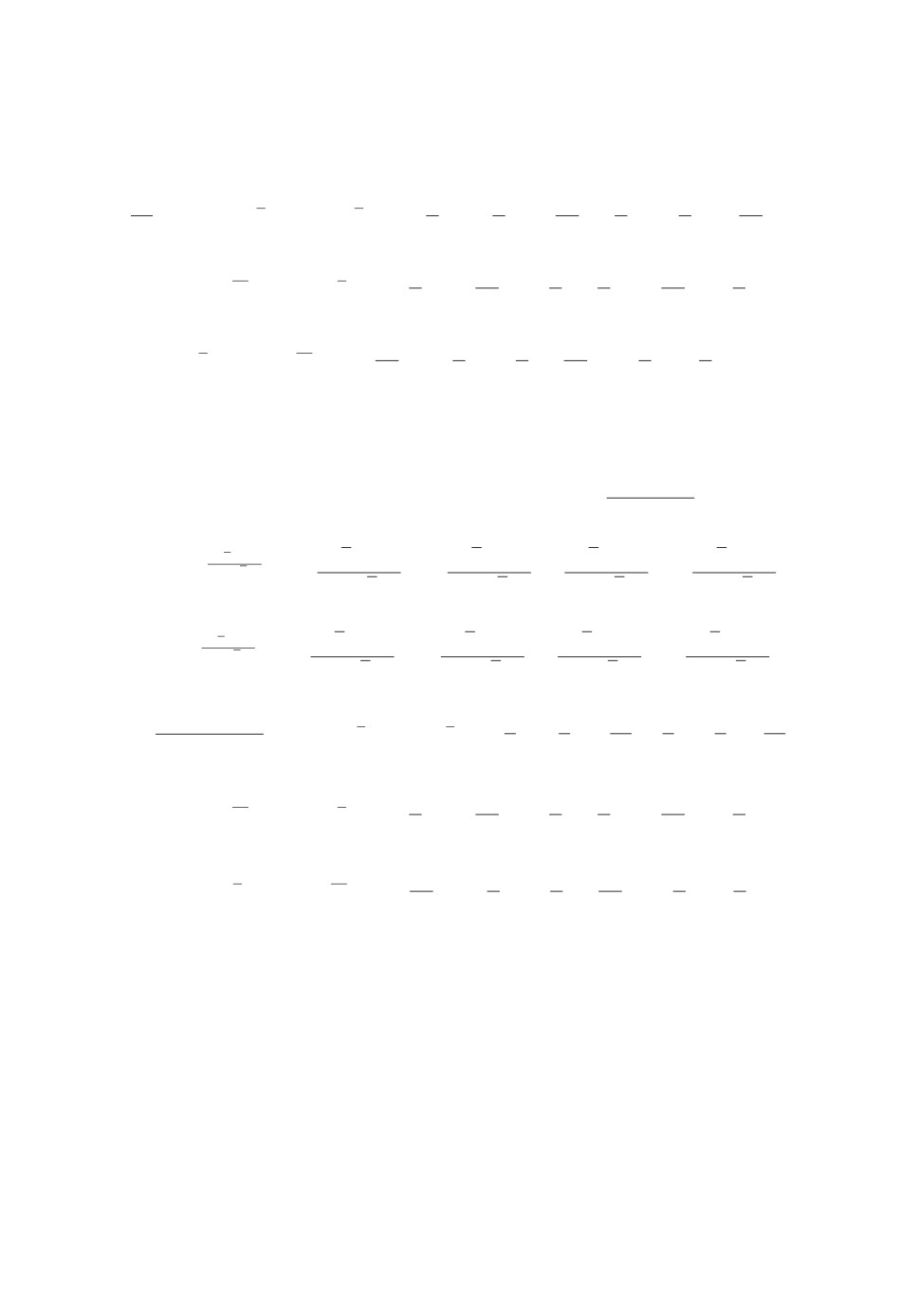
Методом Монте-Карло были вычислены выборочные значения критерия
качества I(t) для следующих численных схем:
I5(t) - составная схема ¾средних¿ прямоугольников (порядок точно-
сти 1),
I6(t) - составная схема средних (порядок точности 2).
Их графики приведены на рис. 6. Полученные результаты соответствуют тео-
ретическим выкладкам. Величина I6(t) меньше I5(t), так как порядок ее точ-
ности выше.
6. Заключение
Таблица содержит сводную информацию о порядке точности различных
схем численных реализаций оценок фильтрации в зависимости от вида шу-
ма в наблюдениях: аддитивного или мультипликативного. Первое значение в
ячейке означает порядок аналитической аппроксимации, второе - итоговый
порядок точности, обеспечиваемый выбранной схемой численной реализации.
Значение, взятое в скобки, означает, что детальный вывод итогового порядка
в данной работе не приведен.
Анализируя данные в таблице, можно прийти к следующим заключениям.
В случае фильтрации с наблюдениями общего вида (снос в наблюдени-
ях - ненулевой, матрицы интенсивности шумов - неодинаковы для разных
состояний МСП) следует применять составные схемы вычисления интегра-
лов. При этом схема должна быть наиболее экономичной с вычислительной
Порядок точности различных схем реализации
Вид шума Диск-ция сист.
¾Лев.¿ пр-ки
¾Сред.¿ пр-ки Кв. Гаусса
Прост.
Прост.
Прост.
Прост.
Аддитив. шум
1|12
1 |12
1| 1
2| 2
Прост. Сост. Прост. Сост. Прост. Сост. Прост. Сост.
Мультиплик.
1| 0
1 | (1)
1 | (0)
1 | (1)
1 |0
1 |1
1 | (0)
1 | (2)
шум
–
-
-
-
1 | (0)
2 |2
-
-
39
точки зрения, а требуемая точность должна достигаться путем выбора под-
ходящего дробного шага интегрирования, меньшего, чем шаг дискретизации
по времени. В качестве такой схемы предлагается выбрать метод ¾средних¿
прямоугольников.
Судя по результатам численных экспериментов, при малых шагах дис-
кретизации по времени, когда полученные асимптотические оценки порядка
точности имеют место, разница в применении аналитической аппроксима-
ции того или иного порядка незначительна. Поэтому выбор пары ¾порядок
аналитической аппроксимации-численная схема¿ должен проводиться инди-
видуально для каждой конкретной задачи. В итоге должен быть достигнут
компромисс между требованиями к точности получаемых оценок и к ограни-
чениям на имеющиеся вычислительные ресурсы.
Построение алгоритмов численного решения задачи фильтрации марков-
ских процессов по непрерывным наблюдениям с аддитивными/мультипли-
кативными шумами нельзя считать законченным. Во-первых, при выводе по-
рядка точности численных реализаций использовались достаточно консерва-
тивные неравенства - оценки сверху. Именно они привели к пессимистиче-
скому выводу о невозможности использования простых (несоставных) схем
численного интегрирования для обработки наблюдений с мультипликативны-
ми шумами. Использование более ¾тонких¿ неравенств, возможно, позволит
уточнить порядки точности тех или иных схем интегрирования. Во-вторых,
полученные результаты делают возможным разработку численных методов
решения задач фильтрации по непрерывным наблюдениям состояний марков-
ских процессов более общего вида: общих МСП, диффузионных процессов и
пр. В-третьих, открытым остается вопрос о величине расхождения оценок
фильтрации по непрерывным и по дискретизованным наблюдениям. Все эти
проблемы представляются перспективными для дальнейших исследований.
ПРИЛОЖЕНИЕ
Доказательство леммы 1. Первый сомножитель в (3.10) представ-
ляет собой вес ̺kj, при этом число точек в интегральной сумме L = 1. Из
∑N
свойств матрицы интенсивности следует, что W =
̺kj = 1. Далее в изло-
j=1
жении будем использовать следующие обозначения: γkj(y) ≜ ψkj(y) - ξkj(y),
γ(y) ≜ ∥γkj (y)∥k,j=1,N . Разность γkj(y) с учетом того, что gk ≡ g, может быть
записана в виде
(
)
γkj(y) = δkj
1+λjjh - eλjjh N(y,hfj,hg) +
(
)
+ (1 - δkj)λkjh
1 - eλjjh N(y,hfj,hg) +
h
∫
+ (1 - δkj )λkj eλjj hhN(y, hfj , hg) - e(λkk -λjj )uN(y, ufk + (h - u)fj, hg)du
0
|
{z
}
≜Ikj(y)
40
Оценим сверху интеграл в правой части (2.11) с использованием формулы
Тейлора первого и второго порядков:
∫
(
)
(
)
|γkj(y)|dy ≤ δkj
1+λjjh-eλjjh
+ (1 - δkj )λkjh
1-eλjjh
+
RM
∫
+ (1 - δkj)λkj
eλjj h
|Ikj (y)|dy ≤
(Π.1)
RM
∫
≤ K1h2 + (1 - δkj)λkjeλjjh
|Ikj (y)|dy
RM
для некоторой константы K1 > 0. Разность Ikj(y) представляет собой ошиб-
ку численного интегрирования при использовании простой схемы ¾левых¿
прямоугольников и определяется следующим образом [2]:
2
(
)]
h
d [
Ikj(y) =
e(λkk-λjj)uN y,ufk + (h - u)fj,hg
=
2 du
u=z
2
(
)
h
=
e(λkk-λjj)zN y,zfk + (h - z)fj,hg ζ0(y,z),
2
где z = z(y) ∈ [0, h] - некоторый параметр, зависящий от y, и
z
1
(Π.2)
ζ0(z) ≜ λkk -λjj +〈fj,fk -fj〉g-1 -
∥fk - fj∥2g-1 +
〈y, fk - fj〉g
−1 .
h
h
Непосре
∫
∫
так какRM |Ikj(y)|dy =RM |Ikj (y, zkj (y))|dy, а зависимость zkj (y) в общем
случае неизвестна. Поэтому предварительно оценим |Ikj| сверху. Прежде все-
го, можно непосредственно проверить истинность неравенства
(
)
2
y - zkjfk - h - zkj fj
≥
(hg)-1
(Π.3)
(
)
2
≥ ∥y∥2(2hg)-1 -
zkj fk + h - zkj fj
(hg)-1
Отсюда следует, что
(
(
)
)
h2
(Π.4)
e(λkk-λjj)zN y,zkjfk + h - zkj fj,hg
=
2
(
)
2
(
)
2
h
1
=
e(λkk-λjj)z(2π)-M/2|hg|-1/2 exp -
y -zkjfk - h-zkj fj
≤
2
2
(hg)-1
(
)
2
h
1
≤
e(λkk-λjj)z(2π)-M/2|hg|-1/2 exp
-
∥y∥2
×
(2hg)-1
2
2
)
(
)
2
(1
× exp
zkjfk + h - zkj fj
≤ h2K2N(y,0,2hg),
2
(hg)-1
41
где K2 > 0 - некоторая константа. Тогда
∫
∫
(Π.5)
|Ikj(y)|dy ≤ K2h2
N(y, 0, 2hg)|ζ0
(y, z)|dy ≤
RM
RM
∫
2
z
≤K2h2
kk - λjj + 〈fj,fk - fj〉g-1 -
fk - fj
(y, 0, 2hg)dy +
λ
N
h
g-1
RM
∫
1
+K2h2
y,fk - fj〉g-1
(y, 0, 2hg)dy =
N
h〈
RM
∫
2
z
=K2h2
kk - λjj + 〈fj,fk - fj〉g-1 -
fk - fj
(y, 0, 2hg)dy +
λ
N
h
g-1
RM
∫
D
E
√
1
+
2K2h2
,g-2(fk - fj)
(y, 0, I)dy = K3h2 + K4h2
N
hy
I
RM
для некоторых неотрицательных констант K3 и K4. Подставим эти неравен-
ства в оценку интеграла абсолютной величины γkj:
∫
(
)
γkj(y) dy ≤ K1h2 + (1 - δkj )λkjeλjjh K3h2 + K4h2
≤K5h2
RM
с некоторой константой K5 > 0. Условие (2.11) в этом случае приобретает
форму
∫
∑
max
|γkj(y)|dy ≤ NK5h2 ,
k=1,N
j=1
RM
а неравенство (2.13), характеризующее разницу условного распределения
xT/h и его аппроксимации первого порядка, реализованной с помощью дис-
кретизации дифференциальной системы наблюдения, имеет вид
{
}
(
)
(Π.6)
sup E
∥XT/h -XT/h∥1
≤ 2T λ2h + NK5h2
≤Ch2
π∈Π
для некоторой константы C > 0.
Лемма 1 доказана.
Доказательство следствия 1. Оценим сначала величину W, пред-
полагая для простоты, что λjj = λkk:
∑
W=eλkkh +
̺kj ≤
j:j=k
2
λ2jjh
2
∑
λ2
h
λjjh +
kk
2
- λkkh - λkkh22 + K7h3
≤1+λkkh+
+K6h3 +
λkj
≤
2
λjj - λkk
j:j=k
42
λ2kkh2
∑
λ2jj - λ2kk
≤1+
+
λkjh2
+K8h3 =
2
2(λjj - λkk)
j:j=k
2
∑
λ2
h
h2λkj(λjj + λkk)
kk
=1+
+
+K8h3 =
2
2
j:j=k
∑
h2λkjλjj
=1+
+K8h3 ≤ 1
2
j:j=k
для достаточно малых h и некоторых положительных констант K6, K7, и K8.
Аналогичным образом можно показать, что W ≤ 1 и при λkk = λjj. Далее,
определим отклонение схемы (3.13) от эталона (3.8), учитывая, что gj ≡ g:
γkj(y) = ψkj(y) - ξkj(y) =
∫
h
(
)
= (1 - δkj )̺kj N(y, hfj , hg) - λkj
eλjj h e(λkk-λjj )uN
y, ufk +(h-u)fj, hg
du =
0
(
)
= (1 - δkj )
̺kj - λkjheλjj h N(y, hfj , hg) +
∫
h
(
)
+ (1 - δkj )λkjeλjjhhN(y, hfj, hg)- e(λkk-λjj)uN y, ufk + (h - u)fj, hg du =
0
(
)
= (1 - δkj)
̺kj - λkjheλjj h N(y, hfj , hg) +
2
(
)]
λkjh
d [
+ (1 - δkj )
eλjjh
e(λkk-λjj)uN y,ufk + (h - u)fj,hg
,
2
du
u=z
где z = z(y) ∈ [0, h] - некоторый параметр, зависящий от y, и ζ0(z) опре-
делено (Π.2). Полностью повторяя выкладки (Π.3)-(Π.5), можно убедить-
ся в справедливости неравенства (Π.8) для схемы ¾левых¿ прямоугольни-
1
ков, которая также имеет порядок глобальной точности
. Следствие
1
2
доказано.
Доказательство леммы 2. Проверим для (3.14) выполнение усло-
вия (2.9), используя формулу Тейлора второго порядка и свойства матрицы
интенсивности переходов Λ:
∑
∑
(λkk+λjj)h
W=
̺kjℓ =
δkjeλkkh + (1 - δkj)λkjhe
2
=
j,ℓ
j=1
(
)
2
∑
λ2kjh2
λ2
h
kk
=1+λkkh+
+Ckk(h)h3 +
λkjh
1+λkjh+
+Ckj(h)h3
=
2
2
j:j=k
2
∑
h
=1+
λkjλjj + C(h)h3.
2
j:j=k
43
Здесь все функции {Ckj}k,j ограничены сверху константойmaxk |λkk|36.Так
∑N
как
λkjλjj ≤ 0, то при достаточно малых h условие (2.9) выполнено:
j:j=k
W ≤ 1.
3
]
λkjh
d2 [
γkj(y) = (1-δkj)
eλjjh
e(λkk-λjj)uN(y,ufk +(h-u)fj,hg)
=
24
du2
u=z
2
(
)
λkjh
= (1 - δkj)
eλjjhe(λkk-λjj)zN y,zfk + (h - z)fj,hg
[ζ20(y, z) - ζ1],
2
где вновь z = z(y) ∈ [0, h] - некоторый параметр, зависящий от y, а
∂
1
(Π.7)
ζ1(z) ≜
ζ0(z) =
∥fj - fk∥2g-1 .
∂z
h
Выполняя выкладки, аналогичные (Π.3)-(Π.5), можно получить вариант
∑N ∫
условия (2.11) maxk=1,Nj=1RM |γkj (y)|dy ≤ NK9h2 и неравенства (2.13)
{
}
(
)
(Π.8)
sup E
∥xT/h - xT/h∥1
≤ 2T λ2h + NK10h
≤CTh
π∈Π
для схемы интегрирования простых ¾средних¿ прямоугольников. В двух по-
следних неравенствах K9, K10 и C - некоторые положительные константы.
Лемма 2 доказана.
Доказательство леммы 3. Выполнение условия (2.9) доказывается
аналогично, как и в леммах 1 и 2. Согласно [2] и с учетом того, что gn ≡ g,
абсолютные значения ошибок ограничены следующим образом:
[
(
)]
∂4
(Π.9)
|ǫ1(y)| ≤ h5K11 max
e(λkk-λjj)uN y,ufk + (h - u)fj,hg
,
u∈[0,h]
∂u4
(Π.10)
|ǫ2
(y)| ≤
[
(
)]
∂3
≤h5K12
max
(λkk-λii)u+(λii-λjj )vN y, ufk + vfi + (h - u - v)fj, hg
(u,v)∈D,
,
∂uk∂v3-k e
k=0,3
где K11 и K12 - некоторые положительные константы.
Производная в (Π.9) имеет вид
[
(
)]
∂4
e(λkk-λjj)uN y,ufk + (h - u)fj,hg
=
∂u4
(Π.11)
(
)(
)
= e(λkk-λjj)uN y,ufk +(h-u)fj,hg
ζ40(u)+6ζ20(u)ζ1(u)+3ζ21(u)
,
где ζ0 и ζ1 определены (Π.2) и (Π.7). Строя оценки сверху интеграла от
абсолютного значения e1(y) подобно (Π.5), можно получить неравенство
∫
∫
|e1(y)|dy ≤ K13h3, и аналогичная оценка для |e2(y)| имеет вид
|e2(y)|dy ≤
RM
RM
≤ K14h3 для некоторых неотрицательных констант K13 и K14. В этом случае
{
}
неравенство (2.13) принимает вид supπ∈Π E
∥xT/h - xT/h∥1
≤ CTh2 для неко-
торой константы C > 0 и достаточно малого шага h. Лемма 3 доказана.
44
Доказательство леммы 4. Сначала исследуем характеристики точ-
ности интегрирования простой схемы
¾средних¿ прямоугольников (т.е.
α = 0), а затем сделаем выводы на случай составного варианта данной схемы.
Итак, с учетом того, что fj ≡ 0,
(
)
h
ψkj(y) = δkjeλjjhN(y,0,hgj) + (1 - δkj)λkjhQkj y,
2
При этом разность γkj(y) = ψkj (y) - ξkj(y) представима в виде
(
) ∫h
γkj(y) = (1 - δkj)λkjeλjjh Qkj y,h
- Qkj(y,u)du,
2
0
и согласно [2] для нее верно следующее равенство
λjjh
λkjh3e
∂2
γkj(y) = (1 - δkj)
Qkj(y,u)
=
24
∂u2
u=z
λjjh
[
]
λkjh3e
= (1 - δkj)
Qkj(y,z)
η20(y,z) - η1(y,z)
,
24
где z = z(y) ∈ [0, h] - параметр, зависящий от y,
d
|zgk + (h - z)gj |
η0(y,z) ≜ λkk - λjj -dz
+
2|zgk + (h - z)gj |
(Π.12)
1
+
y⊤[zgk + (h - z)gj]-1(gk - gj)[zgk + (h - z)gj]-1y
2
и
(Π.13)
η1
(y, z) ≜
d2
|zgk + (h - z)gj |d
|zgk + (h - z)gj | - (ddz |zgk + (h - z)gj |)2
z2
≜
+
2|zgk + (h - z)gj |2
+ y⊤[zgk + (h - z)gj]-1(gk - gj)[zgk + (h - z)gj]-1(gk - gj)[zgk + (h - z)gj]-1y.
Предварительно оценим |γkj | сверху. Свойства системы (2.2) гарантируют,
что существуют такие симметрические матрицы g и G, что 0 < g ≤ gn ≤ G
для всех n = 1, N . Поэтому выполняется неравенство
(Π.14)
Qkj(y,u) ≤ K15
N(y, 0, hg),
где
|G|
K15 =
max
e(λkk-λjj)u.
|g|
k,j=1,N:k=j
u∈[0,h]
45
Из свойства определителей [5] следует, что
∑
(Π.15)
|zgk + (h - z)gj | = |z(gk - gj ) + hgj | =
znhN-nGkjn,
n=0
где Gkjn - сумма всех определителей матриц, полученных из u(gk - gj ) путем
замены n столбцов соответствующими столбцами hgj . Отсюда следует, что
∑
d
(Π.16)
|zgk + (h - z)gj | =
nzn-1hN-nGkjn.
dz
n=1
Поэтому верно неравенство
∑
(u)n-1
n
h
Gkjn
|zgk + (h - z)gj |
K16
dz
n=1
=h-1
≤
2|zgk + (h - z)gj |
∑
(u)m
h
h
Gkjm
m=0
∑N
n=1
n|Gkjn|
для K16 = maxk,j=1,N:
∑N
. Таким образом, для |η0| верна
k=j
2 minw∈[0,1]|m=0 Gkjmwm|
следующая оценка сверху:
K16
K18
(Π.17)
|η0| ≤ K17 +
+
∥y∥2I,
h
h2
где K17 = maxk,j=1,N: |λkk - λjj|, K18 = ∥g-1Gg-1∥22 - квадрат спектральной
k=j
∫
нормы матрицы. Заметим также, чтоRM ∥y∥2IN(y, 0, hg)dy = htr (g).
Из (Π.17) следует оценка сверху для квадрата ζ0:
K22
(
)
K23
K24
(Π.18)
η20(y,u) ≤ K21 +
1 + ∥y∥2I
+
∥y∥2I +
∥y∥4I
h2
h3
h4
с некоторыми положительными константами K21, K22, K23 и K24. Исполь-
зуя (Π.15) и (Π.16), можно получить оценку абсолютного значения первого
слагаемого в ζ1(y, u):
)2
2
(d
|zgk + (h - z)gj|d
|zgk + (h - z)gj | -
|zgk + (h - z)gj |
dz2
dz
=
2|zgk + (h - z)gj |2
(
)2
∑
∑
∑
zshN-nGkjn
m(m - 1)zm-2hN-mGkjm -
ℓzℓ-1hN-ℓGkjℓ
n=0
m=2
ℓ=1
=
(
)2
=
∑
2
zshN-sGkjs
s=0
(
)2
∑ (
∑
(z)
∑
(z
z
)s
)ℓ-1
m(m - 1)
m-2 Gkjm -
ℓ
G
h
Gkjn
h
h
kjℓ
1
n=0
m=2
ℓ=1
K25
=
(
)2
≤
,
h2
h2
∑
(z)s
2
Gkjs
h
s=0
46
∑N
∑N
∑N
|Gkjn|
m(m-1)|Gkjm |+(
ℓ|Gkjℓ|)2
n=0
m=2
ℓ=1
где K25 = maxk,j=1,N:
∑N
. Абсолютное
2 minw∈[0,1](s=0 wsGkjs)2
k=j
значение второго слагаемого в ζ1(y, u) также оценивается сверху:
y⊤[zgk +(h-z)gj]-1(gk -gj)[zgk +(h-z)gj]-1(gk -gj)[zgk +(h-z)gj]-1y ≤
K26
≤
∥y∥2I,
h3
где K26 = 4∥g-1Gg-1Gg-1∥22.
Используя все эти неравенства и связь между моментами 2-го и 4-го поряд-
ков гауссовского распределения, получаем следующий вариант неравенства
(2.11):
∑∫
|γkj (y)|dy ≤ K27h + K28h2 + K29h3
j=1
RM
∫ля некоторых положительных констант K27, {28 и K29. Это }начит, что
|γkj (y)|dy = O(h), и согласно (2.13) supπ∈Π E
∥xT/h - xT/h∥1
= O(h0).
RM
Используем для приближенного вычисления ξkj составную схему ¾сред-
них¿ прямоугольников, разбив отрезок интегрирования [0, h] с шагом h1+α.
В этом случае
λjj h
λkjh3+2αe
∂2
γkj(y) = (1 - δkj)
Qkj(y,u)
24
∂u2
u=z
Повторяя все предыдущие выводы этого доказательства для составной схемы
¾средних¿ прямоугольников, можно проверить, что она обеспечивает поря-
док точности 1 + 2α:
∑∫
|γkj(y)|dy ≤ NCh1+2α,
j=1
RM
и согласно (2.13) глобальный показатель точности имеет порядок p
=
= min(1,2α):
{
}
sup E
∥XT/h -XT/h∥1
≤CThp.
π∈Π
Лемма 4 доказана.
Доказательство следствия 2. Согласно (2.13) для сохранения вто-
рого порядка точности аналитической аппроксимации необходимо, чтобы ло-
кальная ошибка численного интегрирования на каждом шаге имела порядок
не более O(h3). Составная схема ¾средних¿ прямоугольников, представлен-
ная в лемме 4, обеспечивает эту точность для вычисления одномерного ин-
теграла - второго слагаемого в (3.16) - при выборе α = 1.
47
Выберем подходящую схему вычисления двойных интегралов по треуголь-
нику, входящих в третье слагаемое (3.16). Прежде всего, определим величину
ошибки приближения интеграла в (2.16) простым методом средних:
∫
h
∫
(
)
h2
h
h
λkiλijeλjj h
Rkij(y,u,v)dvdu =
λkiλijeλjjhRkij y,
,
+
2
3
3
0
0
h
∫
∫
+λkiλijeλjjh
χkij2(y,u,v)dvdu,
0
0
где функция χkij2(y, u, v) имеет вид
((
)
(
)
)2
h
∂
h
∂
χkij2(y,u,v) ≜1
z-
+ w-
Rkij(y,z,w)
2
3
∂z
3
∂w
(z(y,u),w(y,v))
Согласно [2] для некоторой положительной константы K30 верно неравенство
∫
h
∫
∂2
kij
λkiλijeλjjh
χkij2(y,u,v)dvdu ≤ h4K30 max
(y, z, w)
ℓ=0,1,2;
2
.
∂zℓ∂w2-ℓχ
(z,w)∈D
0
0
В лемме 4 также оценивалась вторая производная, однако, от другой функ-
ции, Qkj. Она содержала h2 в знаменателе. Сравнивая Qkj и Rkij, можно
заключить, что вторая производная от Rkij также будет содержать h2 в зна-
∫h ∫h-u
менателе, т.е. λkiλijeλjj h
χkij2(y,u,v)dvdu ≤ h2K31 для некоторой по-
0
0
ложительной константы K31. Так как требуемый порядок точности - третий,
то последнее равенство позволяет сделать вывод о том, что простой метод
средних в данном случае нужной точности не обеспечивает.
Используем для вычисления двойного интеграла составной метод средних,
разбив область интегрирования, прямоугольный треугольник с катетами дли-
ны h, на подобные треугольники с катетами h2. В этом случае
∫h
∫
λkiλijeλjjh
χkij2(y,u,v)dvdu ≤ h4K32
0
0
для некоторой положительной константы K32, и отсюда согласно (2.13) сле-
дует выполнение неравенства
{
}
sup E
∥XT/h -XT/h∥1
≤CTh2,
π∈Π
т.е. для численной реализации аппроксимации порядка s = 2 достаточно ис-
пользования составных схем средних при вычислении одномерных и двойных
интегралов с шагом дискретизации h2.
Следствие 2 доказано.
48
СПИСОК ЛИТЕРАТУРЫ
1. Борисов А.В. L1-оптимальная фильтрация марковских скачкообразных про-
цессов I: точное решение и численные схемы реализации // АиТ. 2020. № 11.
C. 12-34.
Borisov A.V. L1-Optimal Filtering of Markov Jump Processes I: Exact Solution and
Numerical Realization Schemes // Autom. Remote Control. 2020. V. 81. No. 11.
2. Isaacson E., Keller H. Analysis of Numerical Methods. N.Y.: Dover Publications,
1994.
3. Elliott R.J., Aggoun L., Moore J.B. Hidden Markov Models: Estimation and Control.
N.Y.: Springer, 2008.
4. Kloeden P., Platen E. Numerical solution of stochastic differential equations. Berlin:
Springer, 1992.
5. Magnus J., Neudecker H. Matrix Differential Calculus with Applications in Statistics
and Econometrics. N.Y.: Wiley, 2019.
6. Борисов А.В. Фильтрация Вонэма по наблюдениям с мультипликативными шу-
мами // АиТ. 2018. № 1. C. 52-65.
Borisov A.V. Wonham filtering by observations with multiplicative noises // Autom.
Remote Control. 2018. V. 79. No. 1. P. 39-50.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 02.03.2020
После доработки 25.05.2020
Принята к публикации 09.07.2020
49