Автоматика и телемеханика, № 12, 2020
© 2020 г. А.Н. ИГНАТОВ, канд. физ.-мат. наук (alexei.ignatov1@gmail.com)
(Московский авиационный институт)
О ФОРМИРОВАНИИ ПОЗИЦИОННОГО УПРАВЛЕНИЯ
В МНОГОШАГОВОЙ ЗАДАЧЕ ПОРТФЕЛЬНОЙ ОПТИМИЗАЦИИ
С ВЕРОЯТНОСТНЫМ КРИТЕРИЕМ1
Исследуется многошаговая задача портфельной оптимизации. Рассмат-
ривается возможность вложения капитала на каждом шаге в безрисковый
актив с фиксированной доходностью и рисковый актив со случайной до-
ходностью с финитной плотностью. Критерием оптимальности выступает
вероятность достижения или превышения капитала инвестора в терми-
нальный момент времени некоторого заранее заданного уровня. На ос-
нове использования кусочно-постоянного управления предлагается пози-
ционное управление, которое на обширном наборе примеров превосходит
по значению вероятностного критерия ранее известные универсальные
управления, применяющиеся в задачах портфельной оптимизации.
Ключевые слова: многошаговая задача, портфельная оптимизация, веро-
ятностный критерий, позиционное управление.
DOI: 10.31857/S000523102012003X
1. Введение
Исторически исследование задач портфельной оптимизации началось в
1950-х гг. с конструирования различных критериев и мер риска в одноша-
говой постановке, когда портфель ценных бумаг не предполагается к реба-
лансировке в течение инвестиционного горизонта. Хотя в настоящее время
также продолжаются поиски новых мер риска и постановок задач, позволяю-
щих сформировать тот или иной портфель ценных бумаг, особый интерес ис-
следователей привлекают многошаговые задачи портфельной оптимизации,
в которых в течение инвестиционного горизонта предполагается несколько
ребалансировок.
За рубежом исследования многошаговых задач портфельной оптимиза-
ции проводятся, как правило, с использованием математического ожидания
от некоторой целевой функции в качестве критерия. Так, в [1] в качестве
критерия использовалась взвешенная дисперсия, а именно сумма дисперсий
капиталов, вкладываемых в произвольное число активов, в каждый момент
времени инвестиционного горизонта с некоторыми заданными весами; сред-
ний капитал в терминальный момент времени должен быть выше некото-
рой заданной отметки. Априорно выбранные управления, зависящие от мо-
мента времени, корректировались линейно в зависимости от того, насколько
реализация доходностей в прошлый момент времени отличается от средних
1 Работа выполнена при поддержке Российского фонда фундаментальных исследований
(проект № 20-37-70022 Стабильность).
50
доходностей. В [2] было найдено оптимальное аналитическое решение при
использовании экспоненциальной функции полезности, а доходности подчи-
нялись авторегрессии первого порядка с гауссовским белым шумом. А в [3]
предлагались процедуры поиска оптимального управления для различных
функций полезности, в том числе логарифмической и степенной. В [4] рас-
сматривалась многошаговая задача с критерием в виде суммы сверток сред-
него дохода, дисперсии дохода, а также транзакционных издержек в каждый
момент ребалансировки с управлениями, выбираемыми в классе программ-
ных стратегий: для некоторых частных случаев транзакционных издержек
находились оптимальные стратегии или устанавливались их свойства.
В России авторы фокусируются, как правило, на вероятностном или кван-
тильном критериях для формирования портфеля ценных бумаг. Для нахож-
дения оптимального позиционного управления в таких задачах используют
соотношения метода динамического программирования [5]. В силу трудоем-
кости нахождения аналитических выражений функций Беллмана получение
оптимального решения возможно лишь в очень ограниченном числе случа-
ев: в [6] рассматривалась двухшаговая задача с вероятностным критерием,
в которой на каждом шаге был один актив, имеющий нулевую дисперсию
доходности, так называемый безрисковый, и один рисковый актив, имеющий
равномерное на отрезке [-1, A] распределение доходности; в [7] рассматрива-
лась двухшаговая задача с вероятностным критерием, в которой на каждом
шаге был один рисковый актив с равномерным распределением на отрезке
[-1, A] доходности, а другой рисковый актив имел доходность, равномерно
распределенную на отрезке [-1, B]. В связи с ограниченностью в возможно-
сти получения оптимального управления найден целый спектр приближен-
ных к оптимальным управлений в задачах с различной постановкой. В [8] на
основе доверительного метода было найдено приближенное решение в двух-
шаговой задаче с квантильным критерием, одним безрисковым активом и
одним рисковым, имеющим усеченное нормальное распределение доходности
активом на каждом шаге. В [9] также на основе доверительного метода был
предложен алгоритм получения приближенного управления в многошаговой
задаче с квантильным критерием, одним безрисковым и одним рисковым ак-
тивом, имеющим плотность доходности с носителем [-1, A] со специальными
ограничениями на форму плотности, на каждом шаге. В [10] на основе ис-
пользования кусочно-постоянного управления был предложен алгоритм на-
хождения приближенного управления в двухшаговой задаче с вероятностным
критерием и произвольным количеством рисковых активов с произвольным
финитным распределением на каждом шаге. С использованием полученных
в [11] оценок функций Беллмана в [12] обосновывалось использование так
называемый рисковой стратегии, оказавшейся асимптотически оптимальной
в многошаговой задаче с вероятностным критерием. В [13] предлагалось по-
строенное на основе оптимального решения из [6] приближенное управление
в многошаговой задаче с вероятностным критерием, одним безрисковым ак-
тивом и одним рисковым активом, имеющим равномерное на отрезке [-1, A]
распределение доходности. Таким образом, разработка универсального ал-
горитма поиска приближенного к оптимальному решения в многошаговой
51
задаче с вероятностным критерием является крайне актуальной задачей и
составляет предмет настоящей статьи.
В настоящей работе исследуется многошаговая задача портфельной опти-
мизации с одним безрисковым активом и одним рисковым активом, имею-
щим финитную плотность доходности, на каждом шаге. Для формирова-
ния управления используется вероятностный критерий. С использовани-
ем формулы полной вероятности и выбора управления в классе кусочно-
постоянных управлений предлагается приближенное к оптимальному пози-
ционному управление. Рассматривается содержательный пример, в котором
проводится исследование различных стратегий и демонстрируется преиму-
щество предлагаемого управления над известными универсальными управ-
лениями.
2. Постановка задачи
Рассмотрим многошаговую задачу портфельной оптимизации с безриско-
вым активом, имеющим детерминированную доходность b0, и одним риско-
вым активом (например, некоторой акцией или фондовым индексом в целом),
имеющим на t-м шаге случайную доходность Xt, t = 1, T , где T - количество
шагов, причем T ∈ {3, 4, . . .}. Будем предполагать, что случайные величины
X1,X2,... ,XT являются независимыми в совокупности. Будем рассматри-
вать абсолютно непрерывные случайные величины X1, X2, . . . , XT , имеющие
финитный носитель, т.е.
{
}
inf
x ∈ R1 : FXt(x) > 0
= at, t = 1,T,
{
}
sup
x ∈ R1 : FXt(x) < 1
= bt, t = 1,T,
где at и bt - некоторые числа. При этом ∀t ∈ {1, . . . , T } должно выполняться
-1 ≤ at < b0 < bt. Неравенства -1 ≤ at должны быть выполнены, поскольку
цена продажи актива не может быть отрицательной, нарушение неравенств
at < b0 приведет к тому, что на каком-то шаге/каких-то шагах использование
безрискового актива бессмысленно в силу того, что минимальная доходность
рискового актива будет выше. Нарушение неравенств b0 < bt приведет к то-
му, что на каком-то шаге/каких-то шагах использование рискового актива
бесполезно, так как его максимальная доходность не превышает доходность
безрискового актива. Пусть начальный капитал инвестора известен и состав-
ляет C1. Пусть u0t - доля капитала инвестора, вкладываемого в безрисковый
актив на t-м шаге, а u1t - доля капитала инвестора, вкладываемого в рис-
ковый актив на t-м шаге. Будем предполагать, что операции ¾short-sales¿
невозможны, т.е. нельзя брать деньги в долг. С учетом данного ограничения
= col(u0t, u1t) выбираются из множества
{
}
U =
(x, y)T : x + y = 1, x ≥ 0, y ≥ 0
А динамика капитала инвестора описывается соотношением
(1)
Ct+1 = Ct(1 + u0tb0 + u1tXt
),
t = 1,T,
52
где Ct+1 - капитал по окончании t-го шага. Отметим, по постановке задачи
капитал не может оказаться отрицательным.
Пусть ϕ - желаемый инвестором уровень капитала в терминальный мо-
мент времени. Очевидно, что в зависимости от выбранного управления -
структуры инвестиционного портфеля - на каждом шаге вероятность дости-
жения или превышения порога ϕ различна. Будем выбирать управление в
классе позиционных стратегий, т.е. ut = ut(Ct), t = 2, T . Управление на пер-
вом шаге в силу известности C1 является программным. Целью управления
портфелем ценных бумаг является максимизация вероятности достижения
или превышения капиталом инвестора желаемого порога ϕ. Для этой цели
зададим функционал вероятности
(2)
Pϕ(u(·)) = P (CT+1
(u(·), X) ≥ ϕ) ,
где
X = col(X1,X2,...,XT), а u(·) = col(u1,u2(·),...,uT(·)).
Поставим задачу
(3)
Pϕ(u(·)) →
max
,
u1∈U,u2(·)∈U2,...,uT (·)∈UT
где Ut - множество измеримых функций ut(·), имеющих значения на множе-
стве U. В силу того, что для непосредственного решения задачи (3) требу-
ется проводить поиск в функциональном пространстве, задачу (3) решают с
использованием метода динамического программирования Беллмана, пред-
варительно проверяя измеримость и оптимальность получаемых стратегий
с помощью ряда условий из [14]. Данные условия для рассматриваемой по-
становки задачи выполнены. Однако использование соотношений метода ди-
намического программирования для вероятностного критерия практически
невозможно в силу трудностей, возникающих в получении аналитического
вида функций Беллмана. В этой связи в [10, 15] было предложено сузить
класс допустимых управлений до класса кусочно-постоянных управлений.
Воспользуемся этим подходом и здесь.
Вначале введем разбиение множества значений состояния системы (капи-
тала инвестора) Ct к началу t-го шага, t = 2, T :
st = s1t ∪ s2t ∪ ... ∪ sntt,
где
s1t = [st1,st2) , s2t = [st2,st3) , ... , snt-1t = [stnt-1,stnt ), stt = [stnt,stnt+1] ,
где
∏
∏
st1 = C1
(1 + ak), stnt+1 = C1
(1 + bk),
k=1
k=1
stnt+1 - st1
sti = st1 + (i - 1)
,
i = 2,nt.
nt
53
Отметим, что разбиение st может быть и другим, а равномерная длина
промежутков sit выбрана для простоты, t = 2, T , i = 1, nt.
Управление на каждом шаге за исключением первого, являющегося про-
граммным из-за известности C1, будет иметь вид
(u10t, u11t)T, Ct ∈ s1t,
(u20t, u21t)T, Ct ∈ s2t,
ut(Ct,st) =
..,
.
t
t
)T, Ct ∈ sntt.
Введя обозначение
= col(u1, u2(·, s2), . . . , uT (·, sT )),
сформулируем задачу поиска оптимального кусочно-постоянного управления
(
)
(4)
uϕ1,uϕ2(·,s2),... ,uϕT(·,sT )
= arg
max
Pϕ(us
(·)).
u1∈U,u2(·,s2)∈U,...,uT (·,sT )∈U
3. Нахождение приближенного решения
Уже при T = 2 поиск аналитического решения в задаче (4) затрудните-
лен. Приходится строить [10, 15] нижнюю оценку функционала вероятно-
сти Pϕ(us(·)) (функционала (2) в классе кусочно-постоянных управлений).
Однако согласно [16] имеется сходимость максимального значения конструи-
руемой в [10, 15] нижней оценки к значению вероятностного критерия на оп-
тимальной позиционной стратегии при устремлении мелкости разбиения s2
к нулю. В этой связи воспользуемся аналогичным подходом и при решении
многошаговой задачи.
На последнем шаге, следуя [15], имеем
∑
(
)
Pϕ(us(·)) =
P
CT+1 ≥ ϕ,CT ∈ siT
≥
i=1
(5)
∑
(
)
(
)
≥ P
sTi(1 + ui0T b0 + ui1T XT ) ≥ ϕ
P
CT ∈ siT
i=1
Так как задача
(4)
- задача максимизации функционала вероятности
Pϕ(us(·)), то полученную в (5) оцен)у также нужно максимизировать. По
определению вероятности P
CT ∈ siT
≥ 0, поэтому нужно решить задачи
(
)
(6)
P∗Ti =
max
P
sTi(1 + ui0T b0 + ui1T XT ) ≥ ϕ
,
(ui0T ,ui1T )T∈U
(
)
(7)
(ũi∗0T, ũi∗1T)T = arg
max
P
sTi(1 + ui0T b0 + ui1T XT ) ≥ ϕ
,
(ui0T ,ui1T )T∈U
54
i = 1,nT. Решение в задачах (6) и (7) найдено в [17] и имеет вид
1,
sTi(1 + b0) ≥ ϕ,
(
)
P∗
Ti
=
ϕ
1 - FXT
-1
,
sTi(1 + b0) < ϕ,
sTi
{
0, sTi(1 + b0) ≥ ϕ,
ũi∗1T =
1, sTi(1 + b0) < ϕ,
ũi∗0T = 1 - ũi∗1T , i = 1,nT . Составив вектор-функцию
(ũ1∗0T,ũ1∗1T)T,
CT ∈ s1T ,
(ũ2∗0T,ũ2∗1T)T,
CT ∈ s2T ,
(8)
ũϕT(CT ,sT ) =
..,
...,
.
(ũnT∗0T, ũnT∗1T)T, CT ∈ snTT,
будем использовать ее как приближенное решение задачи (4) на последнем
шаге, т.е. как приближение функции uϕT (·, sT ). С использованием коэффи-
циентов P∗Ti получим следующую нижнюю оценку максимального значения
функционала вероятности Pϕ(us(·))
∑
(
)
(9)
= P∗TiP
CT ∈ siT
i=1
Принимая в расчет формулу полной вероятности, получаем
PT-1ϕ(u1,u2(·,s2),... ,uT-1(·,sT-1)) =
∑
nT-1∑
(
)
=
P∗TiP CT ∈ siT , CT-1 ∈ sk
=
T-1
i=1 k=1
∑
nT-1∑
(
)
=
P∗TiP CT-1(1 + uk0T-1b0 + uk1T-1XT-1) ∈ siT , CT-1 ∈ sk
T-1
i=1 k=1
К сожалению, получение нижней оценки последнего выражения приводит впо-
следствии к решению минимаксной задачи с нелинейной целевой функцией,
поэтому ограничимся построением нового функционал
PT-1ϕ(u1,u2(·, s2),...
...,uT-1(·, sT-1)), приближенно равного по значениям функционалу
PT-1ϕ(u1,u2(·, s2),... ,uT-1(·, sT-1)), т.е.
PT-1ϕ(u1,u2(·,s2),... ,uT-1(·,sT-1)) ≈
=
∑
nT-1∑
(
)
def=
P∗TiP sT-1k(1 + uk0T-1b0 + uk1T-1XT-1) ∈ siT ,CT-1 ∈ sk
T-1
i=1 k=1
55
Учтя, что случайные величины X1, X2, . . . , XT-1 независимы, и поменяв по-
рядок суммирования в последнем выражении, получим
PT-1ϕ(u1,u2(·,s2),... ,uT-1(·,sT-1)) =
∑
nT-1∑
(
) (
)
=
P∗TiP sT-1k(1 + uk0T-1b0 + uk1T-1XT-1) ∈ si
P CT-1 ∈sk
=
T
T-1
i=1 k=1
nT-1∑
(
∑
(
)
= P CT-1 ∈sk
P∗TiP sT-1k(1 + uk0T-1b0 + uk1T-1XT-1) ∈ si
T-1
T
k=1
i=1
Для нахождения приближенного решения задачи на предпоследнем шаге (4)
максимизируем функционал
(
)
PT-1ϕ u1,u2(·, s2),... ,uT-1(·, sT-1)
Так как управления на различных шагах не зависят друг от друга, в силу
конструкции множества U необходимо решить задачи
∑
(
( (
)
= P∗
Ti
P sT-1k
1+
1-uk
1T -1
b0 +
i=1
)
)
+uk
XT-1
∈si
→ max
,
1T -1
T
0≤uk1T-1≤1
k = 1,nT-1. Имеет место равенство
∑
(
)
P∗TiP
sT-1k (1 + b0) ∈ siT
,
uk1T-1 = 0,
i=1
Gk,sT-1(uk1T-1) =
(
( (
)
)
)
∑
P∗
P sT-1k
1+ 1-uk
b0 + uk
XT-1
∈si
,
Ti
1T -1
1T -1
T
=1
i
uk1T-1 > 0.
Поскольку последняя функция задается кусочно, на открытом множестве,
то будем искать приближенное решение в задаче (10), сравнивая значение
последней функции в точке uk1T-1 = 0 и максимальное значение последней
функции на отрезке ε ≤ uk1T-1 ≤ 1, где ε > 0 - некоторое малое число. Таким
образом, обозначив
∑
(
)
= P∗TiP
sT-1k(1 + b0) ∈ siT
,
i=1
∑
(
( (
)
)
)
i
= max
P∗
P sT-1k
1+
1-uk
b0 + uk
XT-1
∈s
,
Ti
1T -1
1T -1
T
ε≤uk
≤1
1T -1
i=1
56
в качестве приближенного решения в задаче (4), т.е. управления uϕT-1(·, sT-1),
выберем
(ũ1∗0T-1, ũ1∗1T-1)T,
CT-1 ∈ s1T-1,
(ũ2∗0T-1, ũ2∗1T-1)T,
CT-1 ∈ s2T-1,
ũϕT-1(CT-1,sT-1) =
..,
.
,
−1
где
0,
PkT-1
PkT-1 и
PkT-1 = 0,
(
(
)
)
∑
arg max
P∗
P sT-1k
1 + b0 + uk1T-1 (XT-1 - b0)
∈si
,
Ti
T
ũk∗1T-1 =
ε≤uk
≤1
1T -1
i=1
PkT-1
PkT-1,
1,
PkT-1
PkT-1 и
PkT-1 = 0,
k = 1,nT-1. Прокомментируем наличие единицы в ũk∗1T-1: равенство величин
PkT-1
PkT-1 нулю означает, что функция Gk,sT-1(uk1T-1) на множестве {0} ∪ [ε,1]
тождественно равна нулю, так как по определению вероятности функция
Gk,sT-1(uk1T-1) неотрицательна. Это означает, что все управления одинаково
плохи, а значит, можно выбрать наиболее рискованное.
= max
PkT-1
PkT-1}, получим следующую оцен-
ку максимального значения функционала вероятности Pϕ(us(·))
nT-1∑
(
)
(11)
= P∗T-1kP CT-1 ∈sk
T-1
k=1
Отметим, что структура функционалов (9) и (11) идентична. А значит,
если двигаться в обратном времени, аналогично для шагов t = T - 1, . . . , 2
получаются следующие приближенные к оптимальным uϕt(·, st) стратегии
(ũ1∗0t, ũ1∗1t)T,
Ct ∈ s1t,
(ũ2∗0t, ũ2∗1t)T,
Ct ∈ s2t,
(12)
ũϕt(Ct,st) =
..,
.
(ũnt∗0t, ũnt∗1t)T, Ct ∈ sntt,
где
0,
Pkt
Pkt
Pkt = 0,
∑
(
(
)
)
ũk∗1t =
arg max
P∗
P stk
1+b0-uk1tb0+uk
Xt ∈ si
,
Pkt
Pkt,
t+1i
1t
t+1
ε≤uk
≤1
1t
i=1
1,
Pkt
Pkt
Pkt = 0,
57
а
ũk∗0t = 1 - ũk∗1t
и где, в свою очередь,
∑
(
)
= P∗t+1iP
stk (1 + b0) ∈ sit+1
,
i=1
nt+1∑
(
(
)
)
i
= max
P∗
P stk
1+b0 -uk1tb0 +uk
Xt
∈s
,
t+1i
1t
t+1
ε≤uk
1t
≤1
i=1
{
}
= max
Pkt
Pk
,
t
а k = 1,nt. Отметим, что при 0 < ε ≤ uk1t ≤ 1 в силу непрерывности случайной
величины Xt имеет место
(13)
( (
)
)
P stk
1+b0 -uk1tb0 +uk
1t
Xt
∈si
t+1
=
(
(
)
)
=P st+1i ≤stk
1+b0 -uk1tb0 +uk
Xt
≤st+1i+1
=
1t
)
)
(st+1i+1/stk - 1 - b0 + uk1tb0
(st+1i/stk - 1 - b0 + uk1tb0
=FXt
-FXt
,
uk1t
uk
1t
когда stk > 0, k = 1, nt, i = 1, nt+1. Когда stk = 0, а st+1i = 0, то выражение (13)
равно нулю, в случае stk = st+1i = 0 выражение (13) равно единице, k = 1, nt,
i = 1,nt+1.
Для отыскания стратегии первого шага нужно решить задачу
∑
(
)
(14)
P∗2iP
C2 ∈ si2
→
max
u
01≥0,u11≥0,u01+u11=1
i=1
Поскольку критериальная функции в последней задаче
∑
(
)
P∗2iP
C2 ∈ si2
=
i=1
∑
(
)
= P∗2iP
C1 (1 + u01b0 + u11X1) ∈ si2
=
i=1
∑
(
)
P∗2iP
C1(1 + b0) ∈ si2
,
u11 = 0,
i=1
=∑
(
)
P
C1 (1 + b0 - u11b0 + u11X1) ∈ si2
,
u11 > 0
2i
i=1
58
задается кусочно, на открытом множестве, то найдем приближенное решение
задачи (14). Для этого введем
∑
(
)
P1 = P∗2iP
C1(1 + b0) ∈ si
2
i=1
и найдем
∑
(
)
P1 = max
P∗2iP
C1 (1 + b0 - u11b0 + u11X1) ∈ si2
ε≤u11≤1
i=1
Используя величин
P1
P1, доопределим приближенное к оптимальному
управление, получаемое с использованием соотношений (8) и (12), в задаче (4)
на первом шаге:
(15)
ũϕ1 = (ũ∗01, ũ∗11)T,
где
0,
P1
P1,
ũ∗11 =
∑
(
)
rg max
P∗2iP
C1 (1 + b0 - u11b0 + u11X1) ∈ si2
,
P1
P1,
a
ε≤u11≤1
i=1
а
ũ∗01 = 1 - ũ∗11.
При u11 ≥ ε > 0 имеет место равенство
∑
(
)
P∗2iP
C1 (1 + b0 - u11b0 + u11X1) ∈ si2
=
i=1
∑
= P∗2iP (s2i ≤ C1 (1 + b0 - u11b0 + u11X1) ≤ s2i+1) =
i=1
( (
)
))
∑
s2i+1/C1 -1-b0 +u11b0
(s2i/C1 -1-b0 +u11b0
=
P∗
FX1
-FX1
2i
u11
u11
i=1
В этой связи заключаем, что для поиска предлагаемого по формулам (8),
(12), (15) приближенного к оптимальному управления, называемого в даль-
нейшем вероятностным, не нужно проводить оптимизацию в функциональ-
ном пространстве или вычислять функцию Беллмана на каждом шаге, необ-
ходимо лишь решить ряд одномерных задач условной нелинейной оптими-
зации. При этом оценкой вероятности превышения капиталом инвестора за-
планированного порога ϕ при использовании такой стратегии выступает ве-
личина P∗1 = max
P1
P1}, которая является оценкой максимального значе-
ния функционала Pϕ(us(·)). Данную величину можно уточнить, используя
статистическую оценку исследуемой вероятности.
59
Отметим, что исследование сходимости предлагаемого управления к точ-
ному позиционному при уменьшении мелкости разбиений st, t = 2, T , пред-
ставляет отдельный интерес, однако затруднительно ввиду разрывности
функций Беллмана для данной постановки задачи.
4. Пример
Пусть C1 = 1, ϕ = 1,5, b0 = 0,03, ε = 10-6, n1 = n2 = . . . = nT = N, где N -
некоторое число, а T = 10. Предположим также, что инвестиционный порт-
фель ребалансируется каждый год. Сравним предлагаемую многошаговую
вероятностную стратегию (8), (12), (15) с известными: рисковой стратегией
{
(1, 0)T, ϕ ≤ Ct(1 + b0)T-t+1,
uRt(Ct) =
(0, 1)T, ϕ > Ct(1 + b0)T-t+1
из [17], достоинства которой обсуждались в [12], и логарифмической стра-
тегией (стратегией Келли) [18-20], обеспечивающей максимальную среднюю
скорость роста капитала [17], являющейся решением задачи
uLt = (uL0t,uL1t)T = arg
max
M [ln(1 + u0tb0 + u1tXt)] ,
u0t+u1t=1,u0t≥0,u1t≥0
t = 1,...,T. Будем предполагать, что случайные величины X1,X2,...,XT
одинаково распределены. Рассмотрим несколько случаев: когда Xt ∼ R[a, b],
т.е. когда плотность случайной величины Xt имеет вид
1
,
a ≤ x ≤ b,
fXt(x) =
b-a
0
иначе,
и когда Xt ∼ N (m, σ2), т.е. когда плотность случайной величины Xt имеет
вид
{
}
c
(x - m)2
√
exp
-
,
m - 5σ ≤ x ≤ m + 5σ,
(16)
fXt(x) =
2πσ2
2σ2
0
иначе,
где константа c = 1/0,9999994 определяется из условия нормировки плот-
ности, а m - 5σ ≥ -1 для соответствия постановке задачи. Плотность (16)
является плотностью усеченного нормального распределения, t = 1, T . Выбор
именно такого усечения связан с тем фактом, что для случайной величины
Y ∼ N(m,σ2) с любыми значениями параметров m и σ2 имеет место равен-
ство P{m - 5σ ≤ Y ≤ m + 5σ} = 0,9999994. А это значит, что построенное
таким образом усечение оставляет плотность симметричной и ¾отбрасывает¿
диапазоны значений исходной неусеченной случайной величины, вероятность
попадания в которые ничтожно мала. В силу введенного в примере предпо-
ложения об одинаковой распределенности случайных величин X1, X2, . . . , XT
60
далее для краткости будем говорить только о распределении случайной вели-
чины X1, опуская, что случайные величины X2, . . . , XT распределены по тому
же закону. Для сравнения указанных стратегий в каждом из рассматривае-
мых случаев найдем 5 · 106 реализаций случайного вектора X и с помощью
выборочной оценки вероятности оценим вероятность события P{CT+1 ≥ ϕ}
на этих стратегиях.
Во всех рассмотренных случаях математическое ожидание случайной ве-
личины X1 составляет 0,1, что примерно соответствует средней годовой
доходности индекса S & P 500, оцененной по данным за последние 30 лет,
и предлагается в качестве примера годовой доходности в [21]. Отличием
же рассмотренных случаев друг от друга выступает форма плотности рас-
пределения случайной величины X1, а также их дисперсия и, как след-
ствие, коэффициент вариации, т.е. отношение среднеквадратического откло-
нения к математическому ожиданию. Отметим также, что среднеквадра-
тичное отклонение доходности индекса S & P 500, оцененной по данным за
последние 30 лет, составляет порядка 0,15. Таким образом, ¾естественное¿
значение коэффициента вариации на основе данных по индексу S & P 500
составляет 1,5.
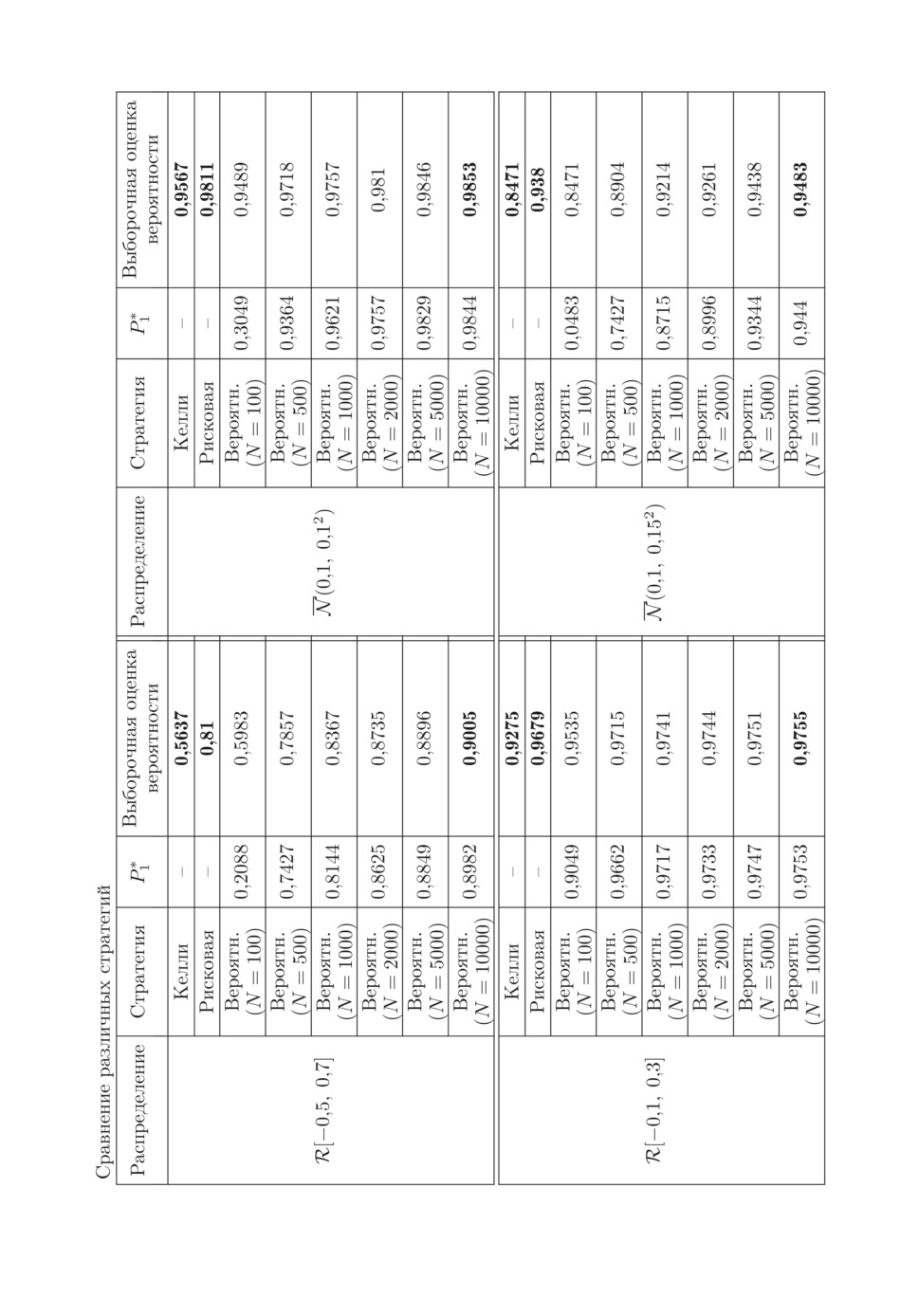
Как следует из таблицы, стратегия Келли существенно уступает риско-
вой и вероятностной (при больших значениях N) в терминах выборочной
оценки вероятности P{CT+1 ≥ ϕ}. C ростом величины N во всех рассмот-
ренных случаях растет величина P∗1, при этом растет и выборочная оценка
вероятности P{CT+1 ≥ ϕ} при использовании вероятностной стратегии. При
увеличении N наблюдается сближение P∗1 и выборочной оценки вероятно-
сти P{CT+1 ≥ ϕ}. В этой связи по значениям P∗1 и выборочной оценки веро-
ятности P{CT+1 ≥ ϕ} можно сделать вывод, что дальнейшее увеличение N
для случаев X1 ∼ R[-0,1, 0,3] и X1 ∼ N (0,1, 0,12) не приведет к существен-
ному увеличению P∗1 и оценки вероятности P{CT+1 ≥ ϕ} на вероятностной
стратегии. В то же время увеличение N для случаев X1 ∼ R[-0,5, 0,7] и
X1 ∼ N(0,1, 0,152) позволит сформировать еще более качественное управле-
ние в терминах оценки вероятности P{CT+1 ≥ ϕ}. Во всех рассмотренных
случаях (уже при N = 5000) вероятностная стратегия лучше рисковой в тер-
минах оценки вероятности P{CT+1 ≥ ϕ}. При этом с увеличением коэффи-
циента вариации разница между выборочной оценкой вероятности на веро-
ятностной и рисковой стратегиях растет, достигая практически 0,1 в случае
X1 ∼ R[-0,5, 0,7].
В статьях [6, 7, 22], связанных или посвященных отысканию оптималь-
ной инвестиционной стратегии в задаче с вероятностным и логарифмическим
критерием использовалось равномерное распределение доходности с носите-
лем [-1, A]. Отметим, что хотя такой случай и малореален на практике, но
получаемое с учетом такого распределения управление полезно, когда досто-
верно известна только средняя доходность. Заметим, что использование тако-
го носителя учитывает случай возможного банкротства компании-эмитента
рискового актива. Более того, как отмечено в [17, 23], равномерное распреде-
ление при минимальных предположениях о законе распределения случайных
величин в целевой функции оказывается наихудшим с точки зрения величи-
ны вероятностного критерия. Таким образом, получаемое управление при та-
62
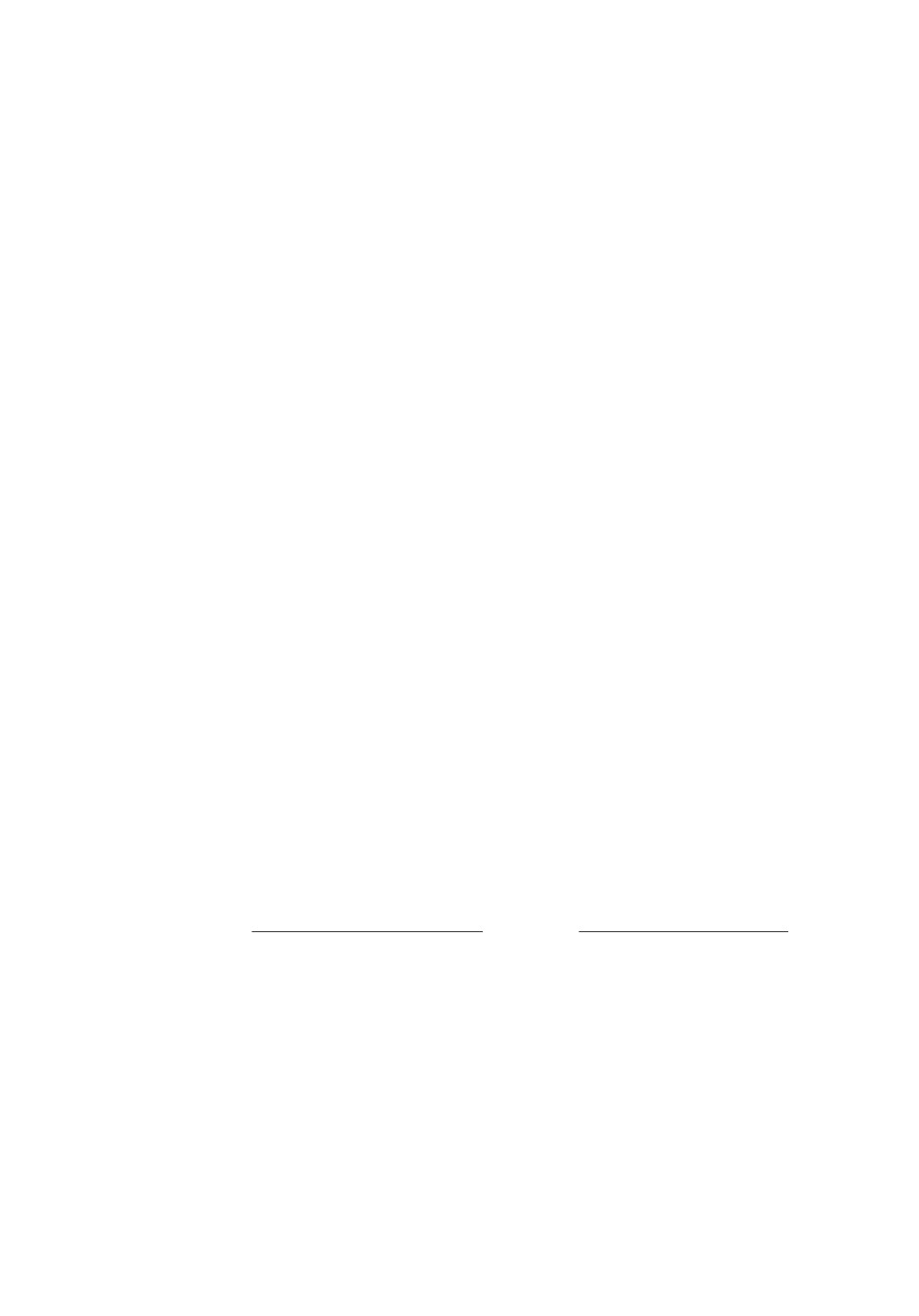
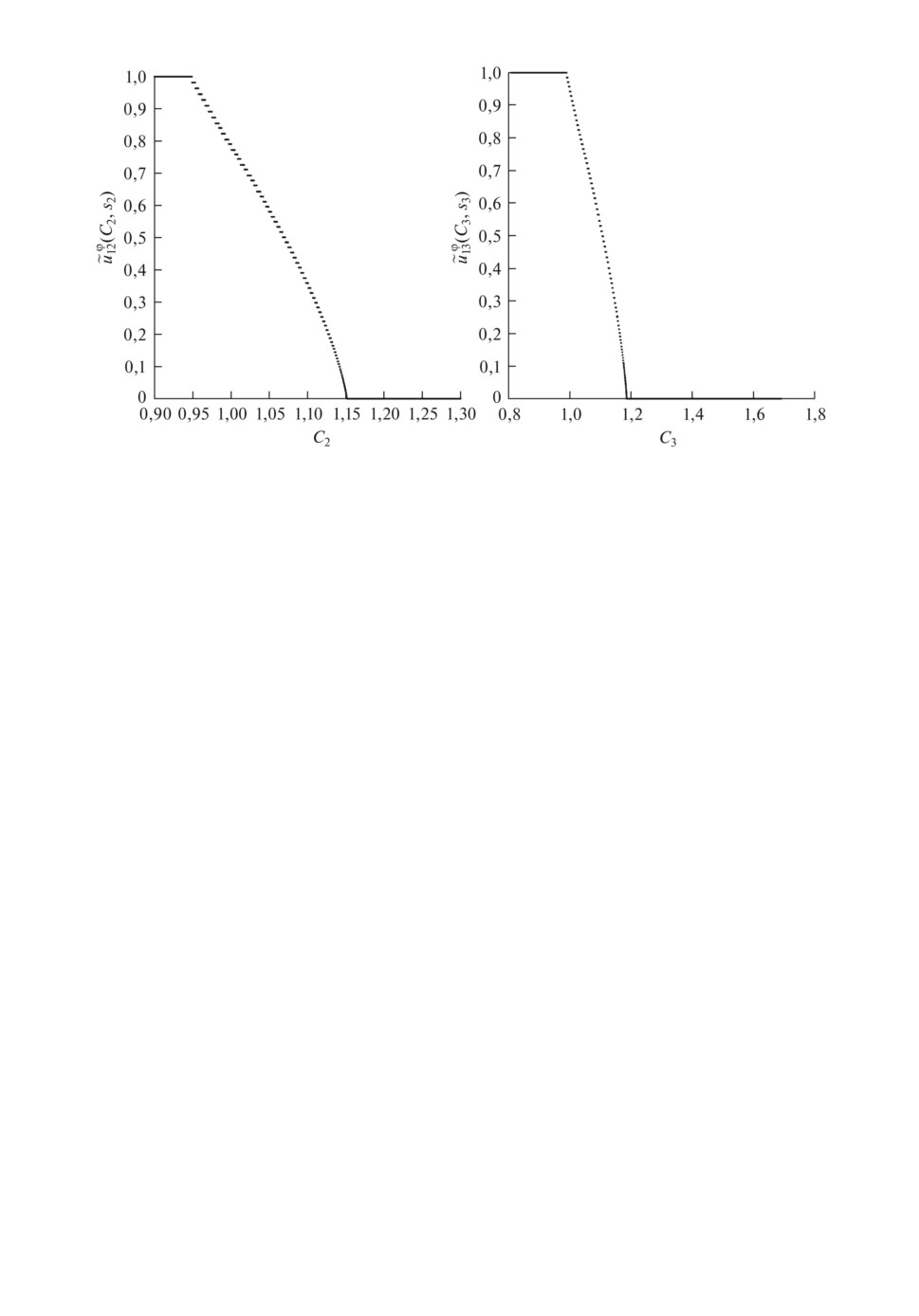
Вид второй компоненты вероятностной стратегии на втором и третьем шагах
для случая X1 ∼ R[-0,1, 0,3], . . . , XT ∼ R[-0,1, 0,3].
ком носителе интересно не только с теоретической точки зрения, но и полезно
с точки зрения получения наилучшей стратегии при недостатке информации.
При A = 1,2 оказалось, что выборочная оценка вероятности P{CT+1 ≥ ϕ} на
5 · 106 реализациях случайного вектора X для предлагаемой вероятностной
стратегии при N = 10000 составляет 0,8253 (при P∗1 = 0,8165), что существен-
но выше выборочной оценки вероятности для рисковой стратегии, составляю-
щей в этом случае 0,6953.
Таким образом, в условиях ¾естественной¿ неопределенности (коэффици-
ента вариации, примерно равного или меньшего 1,5) вероятностная страте-
гия несколько лучше рисковой по значению выборочной оценки вероятности
P{CT+1 ≥ ϕ}, в случае же существенной неопределенности предлагаемая ве-
роятностная стратегия значительно превосходит рисковую.
Теперь рассмотрим вид второй компоненты вероятностной стратегии, т.е.
доли капитала инвестора, вкладываемого в рисковой актив, при N = 10000
на некоторых шагах для случая X1 ∼ R[-0,1, 0,3].
Как видно из рисунка вторая компонента вероятностной стратегии далека
от релейного типа управления, доставляемого рисковой стратегией. Имеется
¾нелинейный¿ участок, описание которого простыми функциями (линейной,
параболической, логарифмической) вряд ли возможно, что еще раз доказы-
вает полезность предлагаемой вероятностной стратегии.
Результаты получены на персональном компьютере (Intel Core i5 4690,
3.5 GHz, 8 GB DDR3 RAM). Время вычислений для N = 10000 составило от
одного до трех часов в зависимости от используемого распределения доходно-
стей, что доказывает применимость на практике разработанного алгоритма.
При этом было задействовано только одно ядро компьютера, распараллели-
вание не применялось, а значит, процесс вычислений может быть еще суще-
ственно ускорен.
63
5. Заключение
В работе было предложено новое позиционное управление, приближенное
к оптимальному в многошаговой задаче портфельной оптимизации с веро-
ятностным критерием. Соотношения, на основе которых построено предла-
гаемое управление, получены на основе полной вероятности и формирова-
ния управления в классе кусочно-постоянных управлений. На каждом шаге
предлагаемое управление получается исходя из решения ряда задач одномер-
ной условной нелинейной оптимизации. В рассмотренном примере продемон-
стрировано преимущество предлагаемого управления над известными уни-
версальными управлениями. Рассмотренный подход и предлагаемое управ-
ление можно обобщить на случай произвольного количества рисковых ак-
тивов на каждом шаге, не отыскивая при поиске вероятностной стратегии
на каждом шаге детерминированный эквивалент, как в настоящей статье, а,
например, используя дискретизацию вероятностной меры, что является пред-
метом дальнейших исследований, как и исследование статистических свойств
предлагаемого управления.
СПИСОК ЛИТЕРАТУРЫ
1.
Calafiore G. Multi-period Portfolio Optimization with Linear Control Policies //
Automatica. 2008. V. 44. No. 10. P. 2463-2473.
2.
Bodnar T., Parolya N., Schmid W. On the Exact Solution of the Multi-period Port-
folio Choice Problem for an Exponential Utility under Return Predictability // Eur.
J. Oper. Res. 2015. V. 246. No. 2. P. 528-542.
3.
Canakoglu E., Ozekici S. Portfolio Selection in Stochastic Markets with HARA Util-
ity Functions // Eur. J. Oper. Res. 2010. V. 201. No. 2. P. 520-536.
4.
Mei X., DeMiguel V., Nogales F.J. Multiperiod Portfolio Optimization with Mul-
tiple Risky Assets and General Transaction Costs // J. Bank. & Fin. 2016. V. 69.
P. 108-120.
5.
Кан Ю.С. Оптимизация управления по квантильному критерию // АиТ. 2001.
№ 5. С. 77-88.
Kan Yu.S. Control Optimization by the Quantile Criterion // Autom. Remote Con-
trol. 2001. V. 62. No. 5. P. 746-757.
6.
Григорьев П.В., Кан Ю.С. Оптимальное управление по квантильному критерию
портфелем ценных бумаг // АиТ. 2004. № 2. С. 179-197.
Grigor’ev V.P., Kan Yu.S. Optimal Control of the Investment Portfolio with Respect
to the Quantile Criterion // Autom. Remote Control. 2004. V. 65. No. 2. P. 319-336.
7.
Кибзун А.И., Игнатов А.Н. Двухшаговая задача формирования портфеля цен-
ных бумаг из двух рисковых активов по вероятностному критерию // АиТ. 2015.
№ 7. С. 78-100.
Kibzun A.I., Ignatov A.N. The Two-step Problem of Investment Portfolio Selection
from Two Risk Assets via the Probability Criterion // Autom. Remote Control. 2015.
V. 76. No. 7. P. 1201-1220.
8.
Кибзун А.И., Кузнецов Е.А. Оптимальное управление по квантильному крите-
рию портфелем ценных бумаг // АиТ. 2001. № 9. С. 101-113.
Kibzun A.I., Kuznetsov E.A. Optimal Control of Discretionary Portfolio // Autom.
Remote Control. 2001. V. 64. No. 9. P. 1489-1501.
64
9.
Кибзун А.И., Кузнецов Е.А. Позиционная стратегия формирования портфеля
ценных бумаг // АиТ. 2003. № 1. С. 151-166.
Kibzun A.I., Kuznetsov E.A. Positional Strategy of Forming the Investment Portfo-
lio // Autom. Remote Control. 2003. V. 64. No. 1. P. 138-152.
10.
Кибзун А.И., Игнатов А.Н. Сведение двухшаговой задачи стохастического про-
граммирования с билинейной функцией дохода к задаче смешанного целочис-
ленного линейного программирования // АиТ. 2016. № 12. C. 89-111.
Kibzun A.I., Ignatov A.N. Reduction of the Two-step Problem of Stochastic Optimal
Control with Bilinear Model to the Problem of Mixed Integer Linear Programming //
Autom. Remote Control. 2016. V. 77. No. 12. P. 2175-2192.
11.
Азанов В.М., Кан Ю.С. Синтез оптимальных стратегий в задачах управления
дискретными системами по вероятностному критерию // АиТ. 2017. № 6. 57-83.
Azanov V.M., Kan Yu.S. Design of Optimal Strategies in the Problems of Discrete
System Control by the Probabilistic Criterion // Autom. Remote Control. 2017.
V. 78. No. 6. P. 1006-1027.
12.
Азанов В.М., Кан Ю.С. Двухсторонняя оценка функции Беллмана в задачах
стохастического оптимального управления дискретными системами по вероят-
ностному критерию качества // АиТ. 2018. № 2. C. 3-18.
Azanov V.M., Kan Yu.S. Bilateral Estimation of the Bellman Function in the Prob-
lems of Optimal Stochastic Control of Discrete Systems by the Probabilistic Perfor-
mance Criterion // Autom. Remote Control. 2018. V. 79. No. 2. P. 203-215.
13.
Азанов В.М., Кан Ю.С. Усиленная оценка функции Беллмана в задачах стоха-
стического оптимального управления с вероятностным критерием качества //
АиТ. 2019. № 4. С. 53-69.
Azanov V.M., Kan Yu.S. Refined Estimation of the Bellman Function for Stochas-
tic Optimal Control Problems with Probabilistic Performance Criterion // Autom.
Remote Control. 2019. V. 80. No. 4. P. 634-647.
14.
Кибзун А.И., Игнатов А.Н. О существовании оптимальных стратегий в задаче
управления стохастической системой с дискретным временем по вероятностному
критерию. // АиТ. 2017. № 10. С. 139-154.
Kibzun A.I., Ignatov A.N. On the Existence of Optimal Strategies in the Control
Problem for a Stochastic Discrete Time System with Respect to the Probability
Criterion // Autom. Remote Control. 2017. V. 78. No. 10. P. 1845-1856.
15.
Ignatov A.N. The Structure of an Investment Portfolio in Two-step Problem of Opti-
mal Investment with One Risky Asset Via the Probability Criterion // Sup. Proc. 5th
Int. Conf. Analysis of Images, Soc, Networks and Texts (AIST’2016). Yekaterinburg,
Russia, April 7-9, 2016. P. 42-50.
16.
Игнатов А.Н. Синтез оптимальных стратегий в двухшаговых задачах стохасти-
ческого оптимального управления билинейной моделью с вероятностным кри-
терием // Дисс
канд. физ.-мат. наук. МАИ, Москва, 2016. 135 с.
17.
Кан Ю.С., Кибзун А.И. Задачи стохастического программирования с вероят-
ностными критериями. М.: Физматлит, 2009.
18.
Kelly J.L. A New Interpretation of Information Rate // Bell Sys. Tech. J. 1956.
No. 35. P. 917-926.
19.
MacLean L.C., Thorp E.O., Zhao Y., Ziemba W.T. How Does the Fortune’s Formula
Kelly Capital Growth Model Perform? // J. Port. Man. Sum. 2011. V. 37. No. 4.
P. 96-111.
20.
Ziemba W.T., Wickson R.G. Stochastic Optimization Models in Finance. World
Scientific, 2006.
65
21. Энциклопедия финансового риск-менеджмента. Под ред. Лобанова А.А., Чугу-
нова А.В. М.: Альпина Паблишер, 2003.
22. Игнатов А.Н., Кибзун А.И. О формировании портфеля ценных бумаг с равно-
мерным распределением по логарифмическому критерию с приоритетной рис-
ковой составляющей // АиТ. 2014. № 3. С. 87-105.
Ignatov A.N., Kibzun A.I. On Formation of Security Portfolio with Uniform Distri-
bution by Logarithmic Criterion and Priority Risk Component // Autom. Remote
Control. 2014. V. 75. No. 3. P. 481-495.
23. Barmish B.R., Lagoa C.M. The Uniform Distribution: a Rigorous Justification for
its Use in Robustness Analysis // Math. Cont. Signals Sys. 1997. V. 10. P. 203-222.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 02.03.2020
После доработки 28.05.2020
Принята к публикации 09.07.2020
66