Автоматика и телемеханика, № 2, 2020
© 2020 г. А.Н. КВИТКО, д-р физ-мат. наук (alkvit46@mail.ru)
(Санкт-Петербургский государственный университет)
ОБ ОДНОМ МЕТОДЕ РЕШЕНИЯ ЛОКАЛЬНОЙ КРАЕВОЙ ЗАДАЧИ
ДЛЯ НЕЛИНЕЙНОЙ УПРАВЛЯЕМОЙ СИСТЕМЫ
Предложен достаточно удобный для численной реализации алгоритм
построения синтезирующей управляющей функции, гарантирующей пе-
ревод широкого класса нелинейных стационарных систем обыкновенных
дифференциальных уравнений из начального состояния в заданное ко-
нечное состояние фазового пространства c учетом ограничений на управ-
ление. Получен конструктивный критерий, гарантирующий указанный
перевод. Эффективность алгоритма иллюстрируется при численном мо-
делировании решения конкретной практической задачи.
Ключевые слова: управляемость, краевые условия, стабилизация.
DOI: 10.31857/S000523102002004X
1. Введение
При создании автономных интеллектуальных систем управления различ-
ными техническими объектами (роботами-манипуляторами, летательными
аппаратами, автономными подводными аппаратами и др.) и их моделиро-
вании на различных этапах проектирования важную роль приобретают во-
просы, связанные с формированием управляющих функций, обеспечивающих
перевод управляемого объекта из начального состояния в заданное конечное
состояние. Математическими моделями интеллектуальных систем управле-
ния многих технических объектов являются сложные нелинейные управляе-
мые системы обыкновенных дифференциальных уравнений. Процесс форми-
рования управляющего воздействия сводится к задаче нахождения управ-
ляющих функций, при которых соответствующие функции фазовых коорди-
нат удовлетворяют заданным краевым условиям. Такой класс задач назы-
вают краевыми задачами, и он является одной из важных и сложных про-
блем математической теории управления. Впервые полное решение этих за-
дач для линейных нестационарных систем в классе управляющих функций,
суммируемых с квадратом, было выполнено в [1]. В последующие десятиле-
тия появились работы, направленные на исследование локальных и глобаль-
ных краевых задач для линейных и нелинейных управляемых систем специ-
ального вида [2-15]. Исследование краевых задач ведется по трем основным
направлениям. Первое связано с нахождением необходимых и достаточных
условий, наложенных на правую часть управляемых систем и гарантирую-
щих перевод систем управления в заданную точку фазового пространства,
см. [1, 2, 4, 5, 7, 8, 11-15]. Второе включает исследование множества конеч-
ных состояний, в которые возможен перевод управляемой системы из некото-
рого начального состояния см. [4, 6, 9-11, 14, 15]. Третье направление касает-
ся разработки точных или приближенных методов построения управляющих
48
функций и соответствующих им траекторий, соединяющих заданные точки
в фазовом пространстве [1, 3, 11-15]. В настоящее время проблема краевых
задач достаточно подробно изучена для линейных и нелинейных управляе-
мых систем специального вида. Однако теория решения граничных задач
для нелинейных управляемых систем общего вида ввиду их сложности еще
недостаточно разработана.
Главное отличие результатов данной статьи от известных ранее состоит в
том, что в ней для достаточно широкого класса нелинейных стационарных
управляемых систем обыкновенных дифференциальных уравнений разрабо-
тан удобный для численной реализации и устойчивый к погрешностям вычис-
лений алгоритм решения локальных краевых задач в классе синтезирующих
управлений, а также найдено конструктивное легко проверяемое необходимое
и достаточное условие, гарантирующие реализацию полученного в работе ал-
горитма в классе синтезирующих управлений. Это условие совпадает с кри-
терием управляемости Р. Калмана в случае линейных стационарных систем.
Поставленная цель достигнута сведением решения исходной задачи к реше-
нию задачи стабилизации линейной нестационарной системы специального
вида и последующему решению задачи Коши для вспомогательной системы
обыкновенных дифференциальных уравнений.
2. Постановка задачи
Объектом исследования является управляемая система обыкновенных
дифференциальных уравнений:
(2.1)
x = f(x,u),
где x = (x1, . . . , xn)T, x ∈ Rn; u ∈ Rr, u = (u1, . . . , ur)T, t ∈ [0, 1], r ≤ n;
(2.2)
f ∈ C4n(Rn × Rr; Rn), f = (f1,...,fn)T,
(2.3)
f (0, 0) = 0,
rank S = n, S = (B, AB, A2B, . . . , An-1B),
(2.4)
∂f
∂f
B=
(0, 0), A =
(0, 0),
∂u
∂x
(2.5)
∥u∥ < N.
Пусть заданы состояния
(2.6)
x(0) = 0, x(1) = x,
x=(x1,...,xn)T,
где x — заданный вектор фазового пространства.
Определение 1. Будем говорить, что пара функций x(t), u(t,x) при-
надлежит множеству Γ, если для нее выполнены условия:
(2.7)
x(t) ∈ C1([0, 1]; Rn), u(t, x) ∈ C1([0, 1) × Rn; Rr
).
49
Задача. Найти пару функций (x(t),u(t,x)) ∈ Γ, удовлетворяющую си-
стеме (2.1) и условиям (2.6), а также условию
(2.8)
u(t, x) ≡ 0, ∀t ∈ [0, 1] при
x = 0.
Указанную пару x(t), u(t, x) будем называть решением задачи (2.1), (2.6).
Определение 2. Будем говорить, что задача (2.1), (2.6) локально раз-
решима, если существует ε > 0 такое, что для всех x таких, что ∥x∥ < ε
существует решение задачи (2.1), (2.6).
Теорема. Пусть для правой части системы (2.1) выполнены условия
(2.2), (2.3). Тогда для локальной разрешимости задачи (2.1), (2.6) необходи-
мо и достаточно, чтобы было выполнено условие (2.4). При этом соответ-
ствующее решение задачи (2.1), (2.6) может быть получено после решения
задачи стабилизации линейной нестационарной системы с экспоненциаль-
ными коэффициентами и последующим решением задачи Коши для вспомо-
гательной системы обыкновенных дифференциальных уравнений.
Главная идея доказательства теоремы состоит в том, что посредством пре-
образований зависимых и независимых переменных решение исходной задачи
сводится к решению задачи стабилизации нелинейной вспомогательной систе-
мы обыкновенных дифференциальных уравнений специального вида при по-
стоянно действующих возмущениях. Для ее решения находится синтезирую-
щее управление, обеспечивающее экспоненциальное убывание фундаменталь-
ной матрицы линейной части вспомогательной системы. На заключительном
этапе осуществляется переход к исходным переменным.
3. Построение вспомогательной системы
Функцию x(t), входящую в решение задачи (2.1), (2.6), ищем в виде
(3.1)
xi(t) = ai(t) + xi
,
i = 1,...,n.
При новых переменных система (2.1) и граничные условия (2.6) примут вид
(3.2)
a = f(x + a,u),
(3.3)
a(0) = -x, a(1) = 0.
В соответствии с (2.3), (2.7), (2.8) пару функций a(t, x) ∈ C1([0, 1]; Rn),
u(t, a(t, x)) = u(t, a(t, x) + x) ∈ C1([0, 1) × Rn; Rr),
u(t, a(t, 0)) ≡ 0, a(t, 0) ≡ 0
∀t ∈ [0,1], удовлетворяющую системе (3.2) и условиям (3.3), будем называть
решением задачи (3.2), (3.3). Рассмотрим задачу: найти пару a(t, x) ∈ C1[0, 1],
u(t, a) ∈ C1([0, 1) × Rn; Rr), u(t, a(t, 0)) ≡ 0, a(t, 0) ≡ 0 ∀t ∈ [0,1], удовлетво-
ряющую системе (3.2) и условиям
(3.4)
a(0) = -x, a(t) → 0 при t → 1.
Замечание 1. Переходя к пределу в решении задачи (2.2), (2.4) при
t → 1, получим решение задачи (3.2), (3.3).
50
Сделаем в системе (3.2) преобразование независимой переменной t по фор-
муле
(3.5)
t=1-e-ατ
,
τ ∈ [0,+∞),
где α > 0 — некоторое фиксированное число, подлежащее определению. Тогда
при новой независимой переменной τ система (3.2) и условия (3.4) примут вид
dc
(3.6)
= αe-ατ
f(x + c,d),
dτ
(3.7)
c(0) = -x, c(τ) → 0 при τ → ∞,
(3.8) c(τ, x) = a(t(τ), x), d(τ, c) = u(t(τ), c(τ, x)), c(τ, 0) ≡ 0, d(τ, c(τ, 0)) ≡ 0,
τ ∈ [0,+∞); c = (c1,...,cn)T, d = (d1,...,dr)T.
Пару функций c(τ, x) ∈ C1([0, ∞); Rn), d(τ, c) ∈ C1([0, ∞) × Rn; Rr), удовле-
творяющую системе (3.6) и условиям (3.7), (3.8) будем называть решением
задачи (3.6), (3.7). Имея решение задачи (3.6), (3.7), с помощью формул (3.5),
(3.8) можно получить решение задачи (3.2), (3.4). Введем обозначения
c= x + θic,
d = θid, θi ∈ [0,1], i = 1,...,n,
∑
∑
|k| =
ki,
|m| =
mi, k! = k1!... kn!, m! = m1!... mr!
i=1
i=1
Используя свойство (2.2) и разложение правой части системы (2.1) в ряд
Тейлора в окрестности точки (x, 0), систему (3.6) можно записать в виде
∑
∑
dci
∂fi
∂fi
= αe-ατ fi(x,0) + αe-ατ
(x,0)cj
+ αe-ατ
(x,0)dj +
dτ
∂xj
∂uj
j=1
j=1
⎡
∑∑
∑∑
1
∂2fi
∂2fi
+
αe-ατ ⎣
(x,0)cjck + 2
(x,0)cjdk +
2
∂xj∂x
k
∂xj∂uk
j=1 k=1
j=1 k=1
⎤
∑∑
∂2fi
(3.9)
+
(x,0)djdk⎦
+...
∂u
j∂uk
j=1 k=1
∑
1
∂|k|+|m|fi
...+ αe-ατ
k1
r
(x,0)ck11c22 × ...
k!m!∂x
|k|+|m|=4n-2
1
∂xk22 . . . ∂xnn ∂u11 ∂u22 . . . ∂ur
...... × ckndm11d22 × ... × drr +
∑
1
∂|k|+|m|fi
+ αe-ατ
(c
d)ck11 c22 × . . .
k!m!∂xk1
r
|k|+|m|=4n-1
1
∂xk22 . . . ∂xnn ∂u11 ∂u22 . . . ∂ur
... × cknn d11d22 × ... × drr, i = 1,...,n.
51
Ограничим область изменения c(τ) неравенством
(3.10)
∥c(τ)∥ < C1
,
τ ∈ [0,∞).
Сделаем множество преобразований сдвигов функций ci(τ), i = 1, . . . , n. Глав-
ная их цель состоит в том, чтобы в правой части системы, полученной в
результате этих преобразований, все слагаемые, не содержащие в явном ви-
де степеней компонент c и d, в области (2.5), (3.10) удовлетворяли оценке
O(e-4nατ ∥x∥) при τ → ∞, ∥x∥ → 0. На первом этапе выполним замену ci(τ),
i = 1,...,n по формуле
(3.11)
ci(τ) = c(1)i - e-ατ fi
(x,0), i = 1,... ,n.
Пусть
∂|k|+|m|fi
D|k|+|m|fi ≡
,
i = 1,...,n.
r
∂xk11 ∂x22 . . . ∂xnn ∂u11 ∂u22 . . . ∂ur
После подстановки (3.11) в левую и правую части системы (3.9) с учетом
введенного обозначения получим систему
∑
dc(1)i
∂fi
= -αe-2ατ
(x,0)fj(x,0) +
dτ
∂xj
j=1
∑∑
1
∂2f
+
α
(x,0)e-3ατ fj(x,0)fk(x,0) +
2
∂x
j∂xk
j=1 k=1
⎛
⎞
∑
∑∑
∂fi
∂2fi
+ α⎝e-ατ
(x,0)c(1)j
- e-2ατ
(x,0)fk(x,0)c(1)j⎠+
∂xj
∂xj∂xk
j=1
j=1 k=1
⎛
⎞
∑
∑∑
∂fi
∂2fi
+ α ⎝e-ατ
(x,0)dk -
(x,0)e-2ατfj(x,0)dk⎠ +
∂u
k
∂uk∂xj
j=1
j=1 k=1
∑∑
∑
1
∂2fi
∂2fi
+
αe-ατ
(x,0)c(1)jc(1)k
+ αe-ατ
(x,0)dkc(2)j +
2
∂xj∂xk
∂xj∂uk
j=1 k=1
j=1 k=1
∑∑
1
∂2fi
(3.12)
+
αe-ατ
(x,0)dkdj
+...
2
∂u
j∂uk
j=1 k=1
∑
1
... + αe-ατ
D|k|+|m|fi(x,0)(c(1)1 - e-ατ f1(x,0))k1 ×
k!m!
|k|+|m|=4n-2
× (c(1)2 - e-ατ f2(x, 0))k2 × . . . × (c(1)n - e-ατ fn(x, 0))kn dm11 d22 ×
∑
1
+ αe-ατ
D|k|+|m| fi(c
d)(c(1)1 - e-ατ f1(x, 0))k1 ×
... × dmrr
k!m!
|k|+|m|=4n-1
× (c(1)2 - e-ατ f2(x, 0))k2 × . . . × (c(1)n - e-ατ fn(x, 0))kn dm11 d22 × . . . × drr ,
i = 1,...n.
52
Из (3.7), (3.11) следует
(3.13)
c(1)i(0) = -xi + fi(x,0), i = 1,... ,n.
Нетрудно видеть, что в правой части системы (3.12) слагаемые, не содержа-
щие в явном виде степеней компонент векторов c и d, в области (2.5), (3.10)
удовлетворяют условию O(e-2ατ ∥x∥), τ → ∞, x → 0. На втором этапе сдела-
ем замену
∑
∂fi
c(1)i(τ) = c(2)i(τ)+1e-2ατ
(x,0)fj(x,0) = c(2)i(τ)+e-2ατ φ(2)i(x),
2
∂xj
j=1
(3.14)
∑
∂fi
φ(2)i(x) =1
(x,0)fj(x,0), φ(2)i(0) = 0, i = 1,... ,n.
2
∂xj
j=1
В результате в новых переменных начальные условия (3.13) примут вид
(3.15)
c(2)i(0) = -xi + fi(x,0) - φ(2)i(x), φ(2)i
(0) = 0, i = 1, . . . , n.
Нетрудно видеть, что в отличие от предыдущей замены в правой части полу-
ченной системы слагаемые, не содержащие в явном виде степеней компонент
векторов c и d, в области (2.5), (3.10) удовлетворяют условию O(e-3ατ ∥x∥),
τ → ∞, ∥x∥ → 0, i = 1,...,n. Используя (3.11)-(3.15) и индуктивный переход
на k-м шаге, получим искомое преобразование вида
(3.16)
c(k-1)i(τ) = c(k)i + e-kατ φ(k)i(x), φ(k)i
(0) = 0, i = 1, . . . , n.
Если применить преобразования (3.16) 4n - 1 раз, объединить слагаемые в
полученной системе, линейные по компонентам вектора c(4n-1) и содержащие
коэффициенты e-iατ , i = 1, . . . , n, а также слагаемые, линейные по компонен-
там вектора d и содержащие коэффициенты e-iατ , i = 1, . . . , 2n, то согласно
(3.12)-(3.16) будем иметь систему и начальные данные, которые в векторной
форме можно записать следующим образом:
dc(4n-1)
= Pc(4n-1) + Qd + R1(c(4n-1),d, x,τ) + R2(c(4n-1),d, x,τ) +
dτ
+ R3(c(4n-1),d,τ) + R4(x,c(4n-1),d,τ),
(3.17)
R1 = (R11,... ,Rn1)T, R2 = (R12,... ,Rn2)T,
R3 = (R13,... ,Rn3)T, R4 = (R14,... ,Rn4)T.
Функции Ri4 состоят из суммы слагаемых, не содержащих степеней компо-
нент векторов c(4n-1) и d; Ri1 содержат все слагаемые, которые линейно зави-
сят от компонент вектора c(4n-1)c коэффициентами e-iατ , i ≥ n + 1, а также
слагаемые, входящие в последнюю сумму правой части полученной системы,
которые не содержат степеней компонент вектора d и с суммой степеней ком-
понент вектора c(4n-1), равной единице; Ri2 содержат все слагаемые, которые
53
линейно зависят от компонент вектора d с множителями e-iατ , i ≥ 2n + 1,
а также слагаемые входящие в последнюю сумму правой части полученной
системы, которые не содержат степеней компонент вектора c(4n-1) и с суммой
степеней компонент вектора d, равной единице. В Ri3 содержатся все слагае-
мые, нелинейные по компонентам векторов c(4n-1) и d.
(
)
P(x) = αe-ατ P1(x) + e-ατP2(x) + ... + e-(n-1)ατPn-1(x) ,
∂f
P1(x) =
(x,0), P1(0) = A;
∂x
(3.18)
(
)
Q(x) = αe-ατ Q1(x) + e-ατ Q2(x) + ... + e-(2n-1)ατ Q2n-1(x) ,
∂f
Q1(x) =
(x,0), Q1(0) = B;
∂u
c(4n-1)(0) = -x + f(x,0) - φ(2)(x) - φ(3)(x) - ... - φ(4n-1)(x),
(3.19)
(
)T
φ(i) = φ(i)1,... ,φ(i)n
,
i = 1,...,4n - 1, φ(i)(0) = 0.
4. Алгоритм решения задачи
1. Построение вспомогательной системы (3.17).
2. Используя метод Н.Н. Красовского, решаем задачу стабилизации линей-
ной части системы (3.17) с матрицами (3.18):
dc(4n-1)
= Pc(4n-1) + Qd.
dτ
В результате получаем управление d(τ) в виде обратной связи
(4.1)
d(τ) = M(τ)c(4n-1).
3. Решаем задачу Коши для системы (3.17), замкнутой управлением (4.1) с
начальными данными (2.19). Подстановка полученного решения в (4.1) дает
пару функций c(4n-1)(τ), d(τ).
4. После перехода в c(4n-1)(τ), d(τ) к исходным зависимым и независимым
переменным по формулам (3.16), (3.14), (3.11), (3.8), (3.5), (3.1) на основании
замечания 1 получим искомые функции x(t), u(t, x).
5. Решение задачи управления однозвенным манипулятором
В качестве иллюстрации предложенного метода рассмотрим решение за-
дачи управления однозвенным манипулятором с учетом нестационарных воз-
мущений. В соответствии с [13] система уравнений, описывающая движение
манипулятора, имеет вид
(5.1)
x1 = x2,
x2 = -a1x2 - a2 sin x1
+ u + μt,
54
где x1 — угол отклонения манипулятора от вертикальной оси,(x2 — ск)рость
отклонения угла, a1 = αL-2m-11, m1 = m0 +M3 , a2 = gL-1
m0 +M2
m-11,
g — ускорение свободного падения, α — коэффициент трения, m0 — масса
переносимого груза, L — длина манипулятора, M — масса манипулятора,
x = (x1,x2)T. Рассмотрим краевые условия
(5.2)
x(0) = x, x(1) = 0, x = (x1, x2)T,
x=(x1,x2)T.
Система (3.6) и условия (3.7) для задачи (5.1), (5.2) имеют вид
dc1
dc2
(5.3)
= αe-ατ c2,
= αe-ατ (-a2 sin c1 - a1c2 + d + μ(1 - e-ατ
)),
dτ
dτ
(5.4)
c1(0) = x1, c2(0) = 0, c2
(τ) → 0
при τ → ∞, i = 1, 2.
Для решения задачи (5.3), (5.4) достаточно выполнить одно преобразование
функции c2(τ) :
(5.5)
c2(τ) = c(1)2(τ) - μe-ατ .
В результате получаем новую функцию c(1)2(τ).
dc1
= αe-ατ c(1)2 - αμe-2ατ ,
dτ
(5.6)
dc(1)2
= -αe-ατ a2 sin c1 -αe-ατ a1c(1)2 -αe-2ατ a1μ+αe-ατ d-αμe-2ατ .
dτ
Линейная часть системы (5.6) может быть записана в форме
dc
= αe-ατ P c + αe-ατ Qd,
c = (c1,c(1)2)T,
dτ
(5.7)
0
0,
1
P =
Q=
-a2,
-a1
,
1
.
После решения задачи стабилизации системы (5.7) и перехода к исходным
переменным по формулам (5.5), (3.5), (3.8) получаем закон управления
2
6α + 4α2 + 2 - (1 - t)2a2α
-3 - 3α + α(1 - t)a1
u(t, x) = -
x1 +
x2 +
α2(1 - t)2
α(1 - t)
(5.8)
-3 - 3α + α(1 - t)a1
+μ
α
Далее решаем задачу Коши для системы (5.1), замкнутой управлением (5.8)
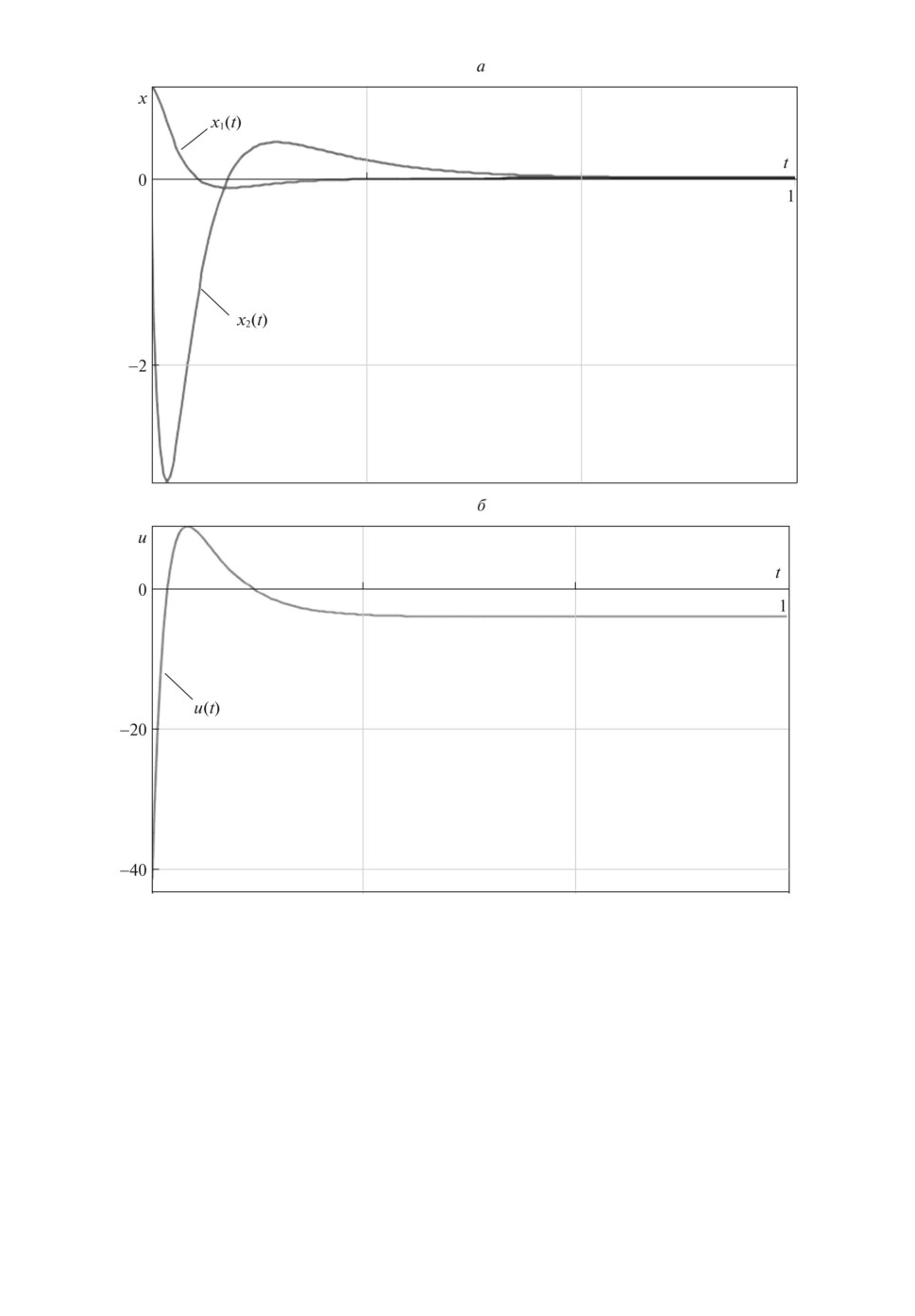
с начальными данными (5.2). В процессе численного моделирования пола-
галось x1 = 1 рад, α = 0,1, α = 0,25, L = 10 м, M = 20 кг, m0 = 1 кг, μ = 0,1,
t ∈ [0, 0,9). На рисунке а и б представлены графики изменения соответствую-
щих функций фазовых координат x1(t), x2(t) и управления u(t).
Замечание 2. При μ = 0, x = 0 из (5.1), (5.8) получаем u(t,x(t,0)) ≡
≡ 0 ∀t ∈ [0,1].
55
Рисунок.
6. Заключение
Анализ приведенного в разделе 4 алгоритма позволяет утверждать, что
наиболее трудоемкая часть процедуры построения решения поставленной за-
дачи, а именно построение вспомогательной системы, нахождение матрицы
обратной связи вспомогательного стабилизирующего управления и переход к
исходным переменным, может быть выполнена в аналитическом виде с ис-
пользованием методов компьютерной алгебры. С другой стороны, результаты
решения задачи управления роботом-манипулятором показывают, что пред-
ложенный в работе метод может быть применен при решении конкретных
практических задач с использованием персональных ЭВМ.
56
ПРИЛОЖЕНИЕ
Доказательство теоремы. Достаточность. Из процедуры нахож-
дения искомой управляющей функции u(t, x) и соответствующей функции
фазовых координат x(t), подробно изложенной в [11], следует, что пара
x(t), u(t, x), является решением задачи (2.1), (2.6).
Необходимость. Пусть условие (2.4) не выполнено и предположим против-
ное, что существует ε > 0 такое, что для всех x ∈ Rn : ∥x∥ < ε существует ре-
шение задачи (2.1), (2.6). Тогда для x существует решение задачи (3.6), (3.7).
Согласно (2.2) систему (3.6) можно записать в виде
∑
∑
dci
∂fi
∂fi
= αe-ατ fi(x,0) + αe-ατ
(x,0)cj
+ αe-ατ
(x,0)dj +
dτ
∂xj
∂uj
j=1
j=1
⎡
∑∑
∑∑
1
∂2fi
∂2fi
(Π.1)
+
αe-ατ ⎣
(c,˜)cj ck + 2
(c
d)cj dk +
2
∂xj∂x
k
∂xj∂uk
j=1 k=1
j=1 k=1
⎤
∑∑
∂2fi
+
(c
d)dj dk⎦,
i = 1,...,n.
∂u
j∂uk
j=1 k=1
Из условий (2.2), (2.3) следует
∑
∑∑
∂fi
∂2fi
fi(x,0) =
(0, 0)xj +
(x,0)xj xk,
x= θix,
θi ∈ [0, 1],
∂x
j
∂xj∂xk
j=1
k=1 j=1
∑
∂fi
∂fi
∂2fi
˜
¯
(Π.2)
(x,0) =
(0, 0) +
(x,0)xk,
x
= θix,
θ
i
∈ [0, 1],
∂xj
∂xj
∂xj∂xk
k=1
∑
∂fi
∂fi
∂2fi
˜
˜
˜
˜
x=
θ
θ
(x,0) =
(0, 0) +
(x,0)xk,
ix,
i ∈[0,1], i=1,...,n.
∂uj
∂uj
∂uj∂xk
k=1
С учетом (П.2) систему (П.1) можно записать в форме
∑
∑∑
dci
∂fi
∂2fi
= αe-ατ
(0, 0)xj
+ αe-ατ
(x,0)xj xk +
dτ
∂x
j
∂xjxk
j=1
j=1 k=1
∑
∑∑
∂fi
∂2fi
+ αe-ατ
(0, 0)cj
+ αe-ατ
(x,0)xkcj +
∂x
j
∂xj∂xk
j=1
j=1 k=1
∑
∑∑
∂fi
∂2fi
+ αe-ατ
(0, 0)dj
+ αe-ατ
(x,0)xkdj +
(Π.3)
∂u
∂xk∂uj
j
j=1
j=1 k=1
⎡
∑∑
∑∑
1
∂2fi
∂2fi
+
αe-ατ ⎣
(c,˜)cj ck + 2
(c
d)cj dk +
2
∂xj∂x
k
∂xj∂uk
k=1 j=1
k=1 j=1
⎤
∑∑
∂2fi
+
(c
d)dj dk⎦
,
i = 1,...,n.
∂u
j∂uk
k=1 j=1
57
Запишем систему (П.3) в векторном виде
dc
= αe-ατ (Ac + Bd + Ax) + αe-ατ (R1(x) +R2(c, x) +R3(d, x) +R4(c, d, x)),
dτ
(Π.4)
R1 = (R11,... ,Rn1)T,
R2 = (R12,... ,Rn2)T,
R3 = (R13,... ,Rn3)T,
R4 = (R14,... ,Rn4)T,
∑∑
∑∑
∂2fi
∂2fi
Ri
˜i2 =
1
=
(x,0)xj xk,
(x,0)cj xk,
∂xj∂x
k
∂xk∂xj
k=1 j=1
k=1 j=1
(Π.5)
∑∑
∂2fi
Ri
3
=
(˜,0)xkdj,
∂u
j∂xk
j=1 k=1
⎡
∑∑
∑∑
∂2fi
∂2fi
Ri
=
(c,˜)cj ck + 2
(c
d)cj dk +
4
2
∂x
j∂x
k
∂xj∂uk
j=1 k=1
j=1 k=1
(Π.6)
⎤
∑∑
∂2fi
+
(c,˜)dj dk⎦ .
∂u
j∂uk
j=1 k=1
Из равенств (П.5), (П.6) следует, что при ∥x∥ < ε в области (2.5), (3.10) спра-
ведливы оценки
R
1
≤L
1 ∥x∥2 ,
R
2
≤L
2 ∥c∥ ∥x∥ ,
R
3
≤L
3 ∥d∥ ∥x∥ ,
(Π.7)
R
4
≤L
4(∥c∥2 + ∥d∥2),
Li > 0, i = 1,... ,4.
Пусть rank S = k, 0 < k < n. Обозначим через bi i-й столбец матрицы B.
Введем в рассмотрение матрицу
{
}
S4 = b1,Ab1,... ,Ak1-1b1,b2,Ab2,... ,Ak2-1b2,... ,br,... ,Akr-1br,lk+1,... ,ln
Здесь kj , j = 1, . . ., r, - максимальное количество столбцов вида bj, . . . , Akj -1bj
таких, что векторы b1, Ab1, . . . , Ak1-1b1, b2, Ab2, . . . , Ak2-1b2, . . . , br, Abr,
...,Akr-1br линейно независимы, векторы lj, j = k + 1,...,n выбраны так,
чтобы
(Π.8)
rank S4
= n.
Используя (П.8), выполним в системе (П.4) замену переменной c по формуле
(Π.9)
c=S4
y.
Согласно [1] в новых переменных система (П.4) и условия (2.7) примут вид
(
)
(
)
(
)
dy
A1
A2
B1
A1
A2
= αe-ατ
y + αe-ατ
d + αe-ατ
y+
dτ
O1
A3
O2
O1
A3
(Π.10)
+ αe-ατ S-14 R1(S4 y) + αe-ατ S-14 R2(S4y, S4 y) +
+ αe-ατ S-14 R3(d, S4 y) + αe-ατ S-14 R4(S4y, d, S4 y),
y = S-14x,
58
(Π.11)
y(0) = -y, y(τ) → 0 при τ → ∞ ∀ y : ∥S4y∥ < ε.
В правой части (П.10) A1, A2, A3, B1 — матрицы с постоянными коэффициен-
тами соответственно размерностей k × k, k × n - k, n - k × n - k, k × r. Бло-
ки O1, O2 являются матрицами с нулевыми элементами соответственно раз-
мерностей n - k × k, n - k × r. Представим векторы y(τ), y в виде y(τ) =
= (y(τ), y(τ))T, y(τ) = (y1(τ), . . . , yk(τ))T,
y(τ) = (yk+1(τ), . . . , yn(τ))T, y=
˜
= (y, y)T,
y=(y1,... , yk)T,
y=(yk+1,...,yn)T
. Введем в рассмотрение си-
стему, состоящую из последних n - k уравнений системы (П.10), предполо-
жив дополнительно, что в ее правую часть подставлены известные функ-
ции y(τ), d(τ). Не умоляя общности, можно положить
y = (0,...,0, yk+1,..., yk+1)T,
dy
= αe-ατ A3 y + αe-ατ A3 y +
(Π.12)
dτ
[
]
+ αe-ατ
S-14
R1(S4y) +R2(S4y,S4y) +R3(d,S4y) +R4(S4y,d,S4 y) ,
гд
S-14 — матрица, состоящая из последних n - k строк матрицы S-14. Тогда
из (П.11) вытекают условия
y
(Π.13)
y(0) = -y,
(τ) → 0
при τ → ∞.
Покажем, что решения системы (П.12), начинающиеся в достаточно ма-
лой окрестности начала координат, не удовлетворяют условию (П.13).
Очевидно, что Φ(τ) = e-e-ατ A3 eA3
— фундаментальная матрица системы
dy
= αe-ατ A3 y, нормированная в нуле. Решение системы (П.12) с началь-
dτ
ными данными (П.13) имеет вид
∫τ
y(τ) = -e-e-ατ A3 eA3 y + e-e-ατ A3 ee-αtA3 αe-αtA3 ydt +
0
∫τ
[
(Π.14)
+e-e-ατA3 ee-αtA3αe-α
S-14
R1(S4y) +
0
]
+ R2(S4y,S4y) +R3(d,S4y) +R4(S4y,S4y) dt, τ ∈ [0,∞).
учеом ограничения (2.5) и условий (2.2), (3.8), (П.9), (П.11) в области
S-14 y
≤εимеемоценки
(Π.15)
∥y(τ, y)∥ ≤ L1 ∥y∥,
∥d(τ, y(τ, y))∥ ≤ L2
∥y∥ .
После вычисления первого интеграла в правой части равенства (П.14) полу-
чаем
∫τ
[
y(τ) = -y + e-e-ατ A3 ee-αtA3 αe-αt
S-14
R1(S4y) +R2(S4y,S4y) +
0
59
]
+
R3(d,S4y) +R4(S4y,S4y) dt, τ ∈ [0,∞).
Отсюда
∫τ
[
˜
ατ A3
αtA3
y(τ)≥
y-
e-e-
αe-αt
ee-
S-14
R
1(S4 y)+
0
]
+
R
2(S4y, S4 y)+
R
3(d, S4y)+
R
4(S4y, S4 y) dt, τ ∈ [0, ∞).
Используя (П.7), (П.9), ( П.15), из последнего неравенства получаем
2
˜
˜
(Π.16)
y(τ)
≥
y-L3
y
,
τ ∈ [0,∞).
В (П.16) константа L3 > 0 зависит от области ∥S4 y∥ < ε. Зафиксируемy в
области ∥S4 y∥ < ε так, чтобы
(
)T
˜
1
˜
(Π.17)
y<
,
∥S4y∥ < ε,
y=
0, . . . , 0,yk+1, . . . ,yn
,
y > 0.
L3
Из (П.16) следует, что все траектории системы (П.12), начинающиеся в об-
ласти (П.17), не удовлетворяют условию (П.13). Указанное обстоятельство
противоречит утверждению о существовании ε > 0, которое фигурирует в
формулировке теоремы. В случае, когда k = 0, доказательство аналогично.
Необходимость доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Kaлман Р., Фалб П., Арбиб М. Очерки по математической теории систем / Под
ред. Э.Л. Напельбаума. М.: Мир, 1971.
2. Walсzak S. A note on the controllability of nonlinear systems // Math. Syst. Theory
1984. V. 17. No. 4. P. 351-356.
3. Комаров В.А. Синтез ограниченных управлений для линейных неавтономных
систем // АиТ. 1984. № 10. С. 44-50.
Komarov V.A. Design of Constrained Control Signals for Nonlinear Non-autonomous
Systems // Autom. Remote Control. 1984. V. 45. No. 10. P. 1280-1286.
4. Крищенко А.П. Исследование управляемости и множеств достижимости нели-
нейных систем управления // АиТ. 1984. № 6. С. 30-36.
Krishchenko A.P. Controllability and Attainability sets of Nonlinear Control
Systems // Autom. Remote Control. 1984. V. 45. No. 6. P. 707-713.
5. Dirk A. Controllability for polynomial systems // Lect. Notes Contr. Inf. Sci. 1984.
No. 63. P. 542-545.
6. Комаров В.А. Оценка множества достижимости для линейных систем // Изв.
АН СССР. Сер. Мат. 1984. № 1. С. 83-87.
7. Balachandran K. Global and local controllability of nonlinear systems // JEEE.
Proc. 1985. No. 1. P. 14-17.
8. Benzaid Z. Global null controllability of perturbed systems // JEE. Trans. Autom.
Control. 1987. No. 7. P. 623-625.
60
9. Попова С.Н. К свойству локальной достижимости линейной управляемой систе-
мы // Дифференц. уравнения. 2003. Т. 39. № 1. С. 50-56.
10. Бердышев Ю.И. О построении области достижимости в одной нелинейной зада-
че // Изв. РАН. Теория и системы управл. 2006. № 4. С. 22-26.
11. Kvitko A., Yakusheva D. On one boundary problem for nonlinear stationary
controlled System // Int. J. Control. 2019. V. 92. No. 4. P. 828-839.
DOI: 10.1080/00207179.2017.1370727
12. Coron J.M. Control and Nonlinearity
// Amer. Math. Soc. Math. Surveys
Monographs. 2007. V. 136.
13. Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория кон-
струирования систем управления. М.: Высш. шк., 1998.
14. Balachandran K., Govindaraj V. Numerical controllability of fractional dynamical
systems // Optimization. 2014. V. 63. No. 8. P. 1267-1279.
15. Красовский Н.Н. Теория управления движением. М.: Наука, 1968.
Статья представлена к публикации членом редколлегии М.М. Хрусталевым.
Поступила в редакцию 16.07.2018
После доработки 23.06.2019
Принята к публикации 18.07.2019
61