Автоматика и телемеханика, № 4, 2020
Управление в технических системах
© 2020 г. В.В. АВЕТИСЯН, д-р физ.-мат. наук (vavetisyan@ysu.am)
(Ереванский государственный университет)
УПРАВЛЯЕМЫЙ ДИНАМИЧЕСКИЙ ПОИСК ПОДВИЖНОГО
ОБЪЕКТА ПРИ МИНИМАЛЬНЫХ ЗАТРАТАХ СВЕТОВОЙ ЭНЕРГИИ1
Рассматривается задача оптимального управления пространственным
движением динамического объекта с целью поиска подвижного объек-
та, совершающего простое движение в прямоугольной области на плоско-
сти. В качестве критерия оптимальности рассматривается функционал,
учитывающий энергозатрату источника света, расположенного на ищу-
щем объекте. Искомый объект считается обнаруженным при попадании в
световой квадрат заданной освещенности. Предложен способ управления
движением ищущего объекта, а также соответствующий закон изменения
электрического тока в цепи источника света, обеспечивающие обнаруже-
ние искомого объекта за гарантированное время поиска при минимальной
световой энергозатрате.
Ключевые слова: динамический поиск, подвижной объект, оптимальное
управление, световая энергозатрата.
DOI: 10.31857/S000523102004008X
1. Введение
Во многих задачах поиска целевого объекта обнаружение осуществляется
с помощью информационной области чувствительности [1]. В качестве тако-
вой можно рассматривать освещенную источником света область, которую
можно перемещать в пространстве с целью обнаружения искомого объекта
при его попадании в эту область [2]. В случае подвижного искомого объекта
в ограниченной области для решения задачи поиска применяется подход [3],
состоящий в построении управлений, при которых, двигаясь по соответствую-
щим траекториям, ищущий объект осуществляет просмотр, заметая полосы,
покрывающие всю область поиска. При определенных условиях на параметры
поисковой системы такой подход выделяет множество управлений, гаранти-
рующих успешное завершение поиска целевого объекта как подвижного [4, 5],
так и неподвижного [6, 7]. В связи с этим целесообразно рассматривать зада-
чу об оптимальном выборе гарантирующего управления. В качестве критерия
оптимальности рассматривается функционал, учитывающий энергозатрату
электрического точечного источника света, расположенного на ищущем объ-
екте [2]. В отличие от [1-7] в настоящей работе ищущий объект управляется
1 Работа выполнена при финансовой поддержке Госкомитета по науке МОН РА, грант
№ 18Т-2С127.
110
по ускорению, а областью освещения является квадрат. Предложен способ
управления движением ищущего объекта и закон изменения электрического
тока в цепи источника света, при которых искомый объект обнаруживает-
ся за гарантированное время поиска с минимальным потреблением световой
энергии.
2. Постановка задачи
Рассматривается система из двух управляемых точечных объектов X
(ищущего) и Y (искомого), движение которых описывается следующими
уравнениями, начальными условиями и ограничениями:
X: x1 =w1,
x2 = w2,
x3 = w3 - g, xi(0) = x0i,
xi(0) = 0, i = 1,2,3,
(2.1)
|w1(t)| ≤ W,
|w2(t)| ≤ W,
|w3(t)| ≤ W3, W3
> g,
x(t) ∈ D(3) = {(x1, x2, x3) :
0 ≤ xi ≤ ai, i = 1,2,3}, t ≥ 0,
√
Y :
yi = vi, yi(0) = y0i,
v21 + v22 ≤ V, i = 1,2,
(2.2)
y(t) ∈ D(2) = {(x1, x2) : 0 ≤ xi ≤ ai, i = 1, 2}, t ≥ 0,
где xi, yi - координаты положения объектов X, Y ; wi и vi - компоненты
векторов управляющего ускорения w и управляющей скорости v объектов X
и Y соответственно, которые являются кусочно-непрерывными функциями
от времени; W , W3, V , ai - заданные постоянные, g - ускорение свободного
падения.
Наличие ограничений на компоненты управляющего ускорения в (2.1) вы-
звано тем, что на практике, в робототехнике, многие управляемые манипуля-
ционные системы [8] работают в трех взаимно перпендикулярных направле-
ниях и управление движением по отдельным направлениям осуществляется
тремя независимыми двигателями. Каждый двигатель создает ограниченное
силовое воздействие, порождающее ограниченное по абсолютной величине
ускорение, которое управляет движением по соответствующей координате.
Пусть объекту X в процессе движения доступна полная информация о со-
отношениях и параметрах (2.1), (2.2) за исключением начальных координат
yi(0) = y0i и текущeй скорости v(t) объекта Y . Предположим, что для опреде-
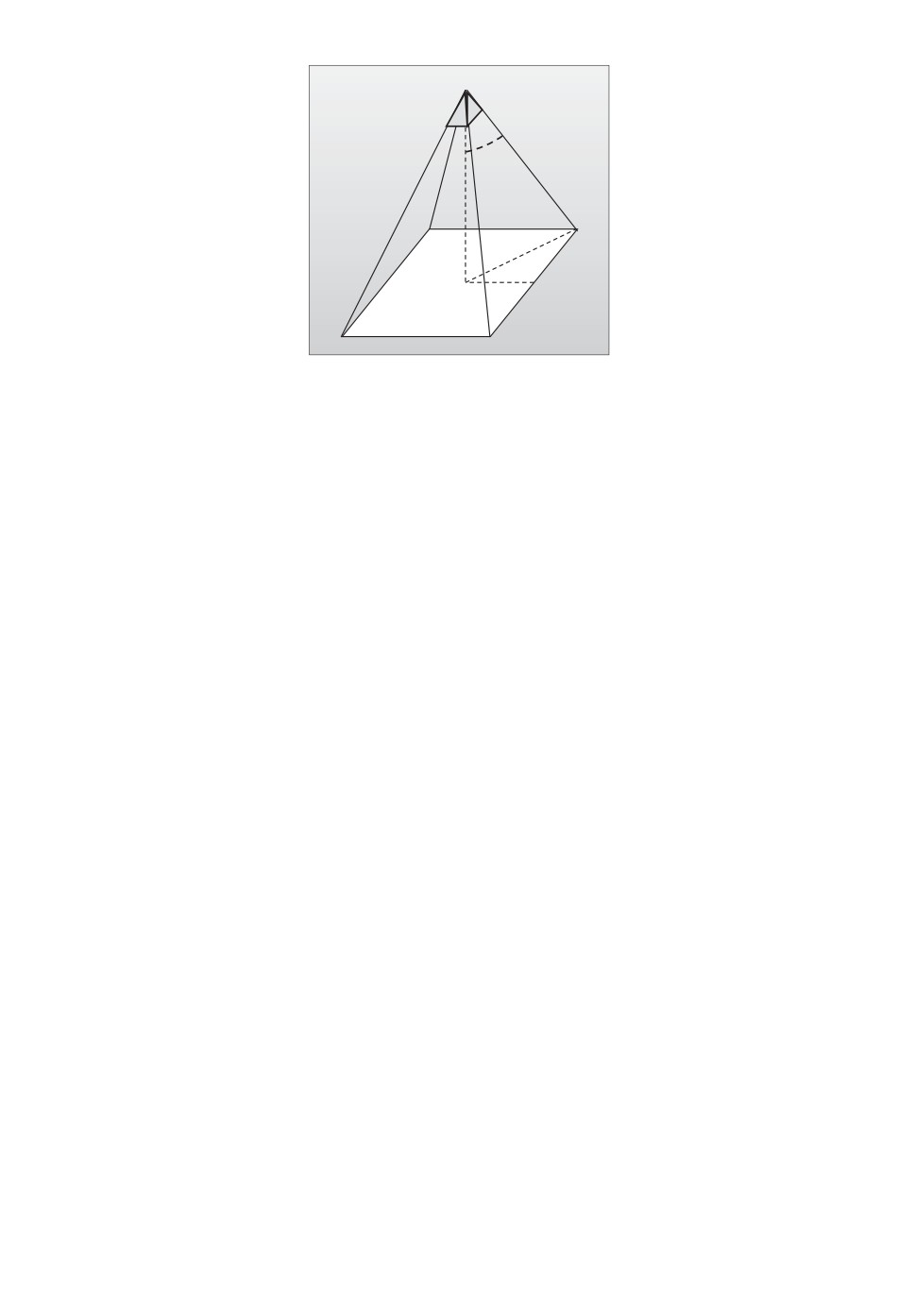
ления точных координат Y у объекта X имеется специальное устройство в ви-
де четырехугольной правильной пирамиды, на вершине которой расположен
изотропный точечный источник света. Излучаемые из источника световые
лучи ограничиваются внутри пирамиды, вследствие чего на горизонтальной
плоскости поиска образуется подвижная и изменяющийся по размеру область
освещенности следующего вида:
{
√ }
K(x(t)) = (ζ1, ζ2) ∈ D(2) : |ζ1,2 - x1,2(t)| ≤ l = Cx3(t), C = tg γ/
2
,
(2.3)
x(t) ∈ D(3).
Область(2.3) - квадрат с центром в точке O(x1(t), x2(t)) ∈ D(2) и сo сто-
роной длины 2l; γ, 0 < γ < π/2 - половина угла раствора световых лучей,
111
S
x3
P
O l
K
Рис. 1. Пирамида с квадратным основанием освещенности.
исходящих из точечного источника и образующих противоположные ребра
лучевой пирамиды (рис. 1).
Скажем, что положение искомого объекта Y становится точно известным
в момент времени t > 0, когда впервые выполняется условие обнаружения,
т.е. условие его попадания в квадрат освещенности
(2.4)
y(t) ∈ K(x(t)).
Искомый объект при попадании его в световой квадрат (2.3) может быть
обнаружен или распознан только при достаточной постоянной освещенно-
сти E, xарактеризующей пороговое значение видимости искомого объекта.
В случае (2.3) минимальная достаточная освещенность определяется сле-
дующим образом. Согласно [9] освещенность в определенной точке на плос-
кости вычисляется по формуле
(2.5)
EP = I cos γ/(SP)2,
где I - сила света источника S в направлении точки измерения P на плоско-
сти, SP - расстояние между источником света и этой точкой, γ - угол между
направлением падения света и перпендикуляром к этой плоскости.
Из (2.5) следует, что для квадратной области (2.3) при заданных x3 и γ
освещенность максимальна в наиболее близкой к источнику точке, в центре
квадрата: EO = Emax = I/x23 и минимальна в наиболее удаленных, в угловых
точках квадрата:
(2.6)
E = Emin = ξI/x23, ξ = cos3
γ.
Величину E = Emin (2.6) будем считать постоянной и заданной.
Используя соотношение Q = ηI [9], где η - коэффициент пропорциональ-
ности (коэффициент удельной мощности) между мощностью световой энер-
гии Q, которую можно считать равной электрической мощности потребляе-
мой источником света, и силой света I, величину минимальной освещенно-
сти E (2.6) можно вычислять как мощность энергии светового излучения,
112
падающего на плоскость:
(2.7)
E = ξI/x23 = ξQ/ηx23.
Из (2.7) имеем
(2.8)
Q=Eηx23
/ξ.
Интеграл от этой функции при постоянных E, η, ξ
∫T
∫
T
(2.9)
J = Qdt = Eηξ-1 x23
dt
0
0
дает величину потребляемой энергии источником света в течение промежут-
ка времени освещения [0, T ]. Функционал (2.9) характеризует энергозатраты
в процессе поиска световым устройством и в соответствии с (2.1) является
функцией от w3.
Согласно закону Джоуля - Ленца величину электрической энергии, по-
требляемой источником света в течение времени [0, T ] освещения, можно вы-
разить следующим образом:
∫T
∫
T
(2.10)
J = Qdt = j2Rdt, Q = j2R,
0 ≤ j(t) ≤ j0
,
t ∈ [0, T],
0
0
где j - действующее значение тока, проходящего через источник света, j0 -
максимально допустимое действующее значение тока, а R - активное сопро-
тивление в цепи источника света.
Из (2.8), (2.10) получаем зависимость действующего значения электриче-
ского тока j от расстояния x3 точечного источника света до центра светового
квадрата:
√
j(t) =
Eηξ-1R-1x3(t), x3(t) > 0,
(
)
√
(2.11)
0 ≤ j(t) ≤ min j0,
Eηξ-1R-1a3
,
t ∈ [0, T].
Соотношение (2.11) с учетом третьего уравнения (2.1) определяет связь
между управляющей функцией w3 = w3(t) и j = j(t).
Замечание. Так как область поиска в (2.2) имеет форму прямоуголь-
ника D(2), то рассмотрение квадрата (2.3) в качестве области обнаружения
(освещенности) с практической точки зрения представляется естественным.
Такой выбор в отличие от кругa обнаружения, рассмотренного например
в [2-5], оправдан тем, что перемещение квадрата освещенности внутри обла-
сти поиска - прямоугольника по прямолинейным траекториям, параллель-
ным сторонам прямоугольника, позволяет ищущему объекту осуществить
просмотр, заметая при этом полосы, покрывающие всю область поиска без
зазоров.
113
В связи с вышесказанным в качестве допустимых управлений для ищуще-
го объекта будем рассматривать класс таких управляющих ускорений w(t) с
кусочно-постоянными компонентами, удовлетворяющих наложенным ограни-
чениям (2.1), которым отвечают ломаные траектории, состоящие из отрезков,
параллельных сторонам прямоугольника.
Задача 1. Найти начальное положение x0 = (x01,x02,x03) ∈ D(3), число
T > 0, допустимое управление w(t), 0 ≤ t ≤ T объекта X и соответствую-
щий закон изменения электрического тока в цепи источника света j = j(t),
0 ≤ t ≤ T, для которых при любом начальном положении y0 = (y01,y02) ∈ D(2)
и любом кусочно-непрерывном управлении v(t), 0 ≤ t ≤ T объекта Y гаран-
тируется выполнение условия (2.4) в некоторый момент t ∈ [0, T ] при мини-
мальной световой энергозатрате (2.9).
3. Описание способа поиска
Опишем сначала предлагаемый способ управления, а затем укажем усло-
вия на входящие в него параметры, при которых решается задача 1. Пусть в
начальный момент t0 = 0 объект X находится в точке
x0 = (x01,x02,x03), x01 = x02 = l0, x03 = C-1l0,
(3.1)
0 < x03 ≤ a3, l0 ≤ Ca3 < min(a1, a2)/2 = a2/2.
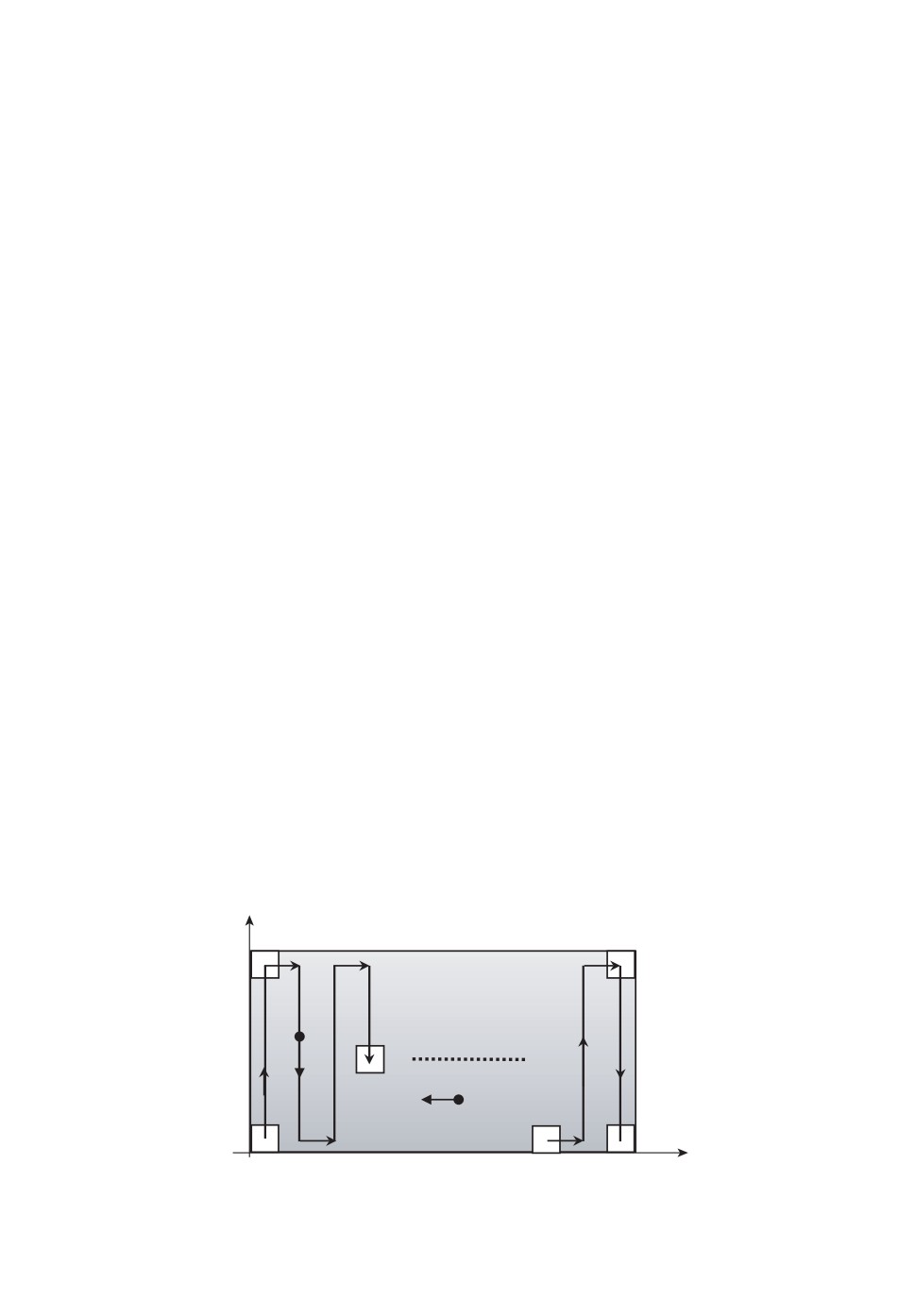
Рассмотрим исходящую из этой точки пространственную ломаную, проек-
ция L0,N = L0L1 . . . LN которой на прямоугольное основание D(2) изображена
на рис. 2.
Двигаясь по ломаной L0,N в направлении, показанном на рис. 2, центр
квадрата K сo стороной постоянной длины 2l0 осуществляет сканирование
прямоугольника с шагом h, 0 < h < 2l0 по оси x1, оставляя с каждой стороны
(верхней и нижней) прямоугольника полосы с шириной l0. Зададим управ-
ление плоским движением X (1.1) (w3(t) ≡ g, t ≥ 0) так, чтобы перемещение
центра квадрата освещенности по отрезку Lk-1Lk происходило оптимальным
x2
a2
LN1
L1
h
D(2)
X
W
2l0
V
Y
L0
LN
0
a1
x1
Рис. 2. Способ перемещения центра квадрата освещенности.
114
по быстродействию образом. Управления w1, w2, обеспечивающие перемеще-
ния центра квадрата из одной вершины Lk-1(x(k-1)1, x(k-1)2) с нулевой ско-
ростью x(k-1)1 = x(k-1)2 = 0 в последующую вершину Lk(x(k)1, x(k)2) с нулевой
скоростью x(k)1 = x(k)2 = 0 по прямолинейным отрезкам Lk-1Lk, определяют-
ся из решения двухточечной задачи оптимального быстродействия [10]:
по вертикальным участкам Lk-1Lk
{
}
w∗1(t) = 0, w∗2(t) = Wsign
(t′/2 - t)Δx2
,
tk-1 ≤ t ≤ tk,
(
)1/2
tk = tk-1+t′, t′= 2
|Δx2|W-1
, k =2n+1, n=0,1,...,(N -1)/2,
Δx2 = x(k)2 - x(k-1)2 > 0, x(k)2 = a2 - l0, x(k-1)2 = l0;
(3.2)
k = 4p + 1, p = 0,1,...,P ≤ (N - 1)/2,
Δx2 = x(k)2 - x(k-1)2 < 0, x(k)2 = l0, x(k-1)2 = a2 - l0;
k = 4q + 3, q = 0,1,...,Q ≤ (N - 1)/2,
t0 = 0, P,Q - целые числа, N - нечетное целое число,
по горизонтальным участкам Lk-1Lk
{
}
w∗1(t) = Wsign
(t′′/2 - t)Δx1
,
w∗2(t) = 0, tk-1 ≤ t ≤ tk,
(
)1/2
tk = tk-1 + t′′, t′′ = 2
Δx1W-1
,
k = 2n, n = 1,...,(N - 1)/2,
(3.3)
Δx1 = x(k)1 - x(k-1)1 = h, k = 2n, n = 1,... ,(N - 3)/2,
Δx1 = x(k)1 - x(k-1)1 ≤ h, k = N - 1, N - нечетное целое число.
Согласно (3.2) перемещение центра квадрата освещенности по верти-
кальным участкам Lk-1Lk (рис. 2) в сторону возрастания координаты x2:
Δx2 = x(k)2 - x(k-1)2 > 0 происходит на интервалах времени tk-1 ≤ t ≤ tk, k =
= 4p + 1, p = 0, 1, . . . , P ≤ (N - 1)/2, а в сторону уменьшения x2: Δx2 = x(k)2-
-x(k-1)2 < 0 - на интервалах времени tk-1 ≤ t ≤ tk, k = 4q + 3, q = 0,1,
...,Q ≤ (N - 1)/2. Поэтому на интервалах tk-1 ≤ t ≤ tk, когда Δx2 > 0, име-
ем w∗2(t) = W при tk-1 ≤ t < t′/2 и w∗(t) = -W при t′/2 ≤ t ≤ tk, а когда
Δx2 < 0, имеем w∗2(t) = -W при tk-1 ≤ t < t′/2 и w∗(t) = W при t′/2 ≤ t ≤ tk.
Здесь t′/2 = (tk - tk-1)/2 - момент переключения управляющего ускорения
w∗(t) от значения W к значению -W или наоборот.
Формулу (3.3) можно пояснить аналогичным образом с той разницей, что
в ней учитывается, что перемещение центра квадрата освещенности по го-
ризонтальным участкам Lk-1Lk происходит только в сторону возрастания
координаты x1 (рис. 2): Δx1 = x(k)1 - x(k-1)1 > 0.
Соответствующий закон изменения электрического тока в цепи источника
света j = j(t) определяется согласно соотношению (2.11):
√
(3.4)
j(t) ≡
Eηξ-1R-1x03
,
t ∈ [0,T].
115
Как следует из (3.2), (3.3), оптимальные времена перемещения одинаковы
по каждому вертикальному участку и по каждому горизонтальному участку
длины h и вычисляются соответственно следующим образом:
√
√
(3.5)
t′ = 2
(a2 - 2l0)W-1, t′′ = 2
hW-1.
4. Гарантированный поиск при минимальной затрате световой энергии
Перейдем к определению параметров l0, h. Сначала положим h = 0 и неза-
висимо от траекторий рис. 2 рассмотрим прямолинейное вертикальное пере-
мещение центра квадрата из положения (2l0, l0) покоя в конечное положение
(2l0, a2 - l0) покоя, а затем обратное перемещение в исходное положение по-
коя при управляющих ускорениях (3.2). Выясним, при каких условиях объ-
ект Y может пересечь ось x1 = l0, избежав обнаружения.
Пусть перед рассматриваемым перемещением центра квадрата освещенно-
сти объект Y занимает положение y1 ≥ 3l0 + ε, y2 = 0 (ε > 0 - сколь угодно
малое число) на нижней стороне прямоугольника, вне квадрата освещенно-
сти. Тогда объекту Y легче всего пересечь ось x1 = l0 незамеченным, если
он будет двигаться по нижней стороне прямоугольника с максимальной по
модулю скоростью (v1 = -V , v2 = 0) в направлении оси x1 = l0. При этом он
√
будет располагать наибольшим временем, равным 2t′ = 4
(a2 - 2l0)W-1, до
очередного возвращения центра квадрата на положение (2l0, l0).
√
Объект Y может избежать обнаружения при условии 4
(a2 - 2l0)W-1 >
> (2l0 + ε)V -1, где (2l0 + ε)V -1 - время перемещения Y по оси x2 = 0 на
расстояние 2l0 + ε.
При противоположном строгом неравенстве
√
(4.1)
4
(a2 - 2l0)W-1 < (2l0 + ε)V-1
X осуществит обнаружение Y , если последний пересечет ось x1 = l0.
Неравенство (4.1) заведомо выполнено, если выполнено более простое
условие
√
(4.2)
2t′ = 4
(a2 - 2l0)W-1 < 2l0V-1.
Разрешая (4.2) относительно l0 и учитывая условие (3.1), определим диа-
пазон изменения параметра l0, при котором неравенство (4.2) выполняется:
√
(4.3)
lmin = -4V2W-1 +
16V4W-2 + 4V2W-1a2 < l0 ≤ Ca3.
Пусть поиск проводится так, как описано в разделе 3, и выполняется нера-
венство (4.2), т.е. l0 удовлетворяет условию (4.3). Перейдем к определению
условия на h, h < 2l0, при котором описанный способ поиска решает задачу 1.
Рассмотрим перемещение центра квадрата освещенности по ломаной
L0,3 = L0L1L2L3 с вершинами
(4.4)
L0 = (l0,l0), L1 = (l0,a2 -l0), L2 = (l0 +h,a2 -l0), L3 = (l0 +h,l0)
116
при управлениях (3.2), (3.3):
⎧
⎨w1(t) ≡ 0,
w2(t) = w∗2(t), t ∈ [0,t1),
w(t) =
w1(t) = w∗1(t), w1(t) ≡ 0,
t ∈ [t1,t2),
⎩
w1(t) ≡ 0,
w2(t) = -w∗2(t), t ∈ [t2,t3),
где t1, t2, t3 определяются с помощью (3.5): t1 = t′, t2 = t′ + t′′, t3 = 2t′ + t′′.
По аналогии со случаем h = 0, чтобы избежать обнаружения, объ-
ект Y должен достичь оси x1 = 0 так, чтобы все время было выполнено
y(t) ∈ K(x(t)), t ∈ [0, t3]. Oбъекту Y легче быть необнаруженным, если в на-
чальный момент времени он находится в положении (2l0 + ε, 0) (ε > 0 - сколь
угодное малое число), вне квадрата обнаружения и движется по нижней сто-
роне прямоугольника D(2) в сторону оси x1 = 0 с максимальной по модулю
скоростью (v1 = -V , v2 = 0). При этом Y имеет наибольшее время, равное
t3 = 2t′ + t′′, между перемещениями центра квадрата вверх и вниз при ска-
нировании шагом h.
Следовательно, чтобы осуществить обнаружение искомого объекта, ищу-
щий объект при движении по верхней горизонтальной стороне прямоуголь-
ника должен выбрать величину шага перемещения h, так чтобы имело место
неравенство
√
√
4
(a2 - 2l0 - ε)W-1 + 2
hW-1 ≤ (2l0 + ε - h)V-1,
которое заведомо выполняется, если выполняется более сильное неравенство
√
√
(4.5)
4
(a2 - 2l0)W-1 + 2
hW-1 ≤ (2l0 - h)V-1, h < 2l0.
При условии (4.5) искомый объект не может с максимальной по модулю
скоростью V пройти расстояние длиной 2l0 - h на оси x2 = 0 будучи не об-
наруженным за время перемещения центра квадрата по ломаной L0,3.
Разрешая (4.5) относительно h, получим диапазон изменения величины
шага, при котором описанный способ поиска гарантирует обнаружение по-
движного объекта Y :
0<h≤hmax,
(4.6)
(
)2
hmax = -V W-1/2 +(V2W-1 +2l0 -4V (a2 -2l0)1/2W-1/2)1/2
< 2l0.
Рассмотрим следующую положительную функцию N1 от l0 и h:
(4.7)
N1(l0, h) = (a1 - 2l0)h-1, lmin < l0 ≤ Ca3,
0 < h ≤ hmax < 2l0.
Функция (4.7) по h монотонно убывающая. Следовательно,
(4.8)
min N1(l0, h) = (a1 - 2l0)h-1max = N1(l0
).
0<h≤hmax
Обозначим:
(4.9)
R0 = {l0 ∈ (lmin, Ca3] : N1(l0) = [N1(l0
)] } ,
117
где символ [·] означает целую часть действительного числа. Для значе-
ний l0 ∈ R0 целое число 1 + N1(l0) определяет то количество вертикаль-
ных перемещений с шагом сканирования hmax (4.6), при котором движениe
центра квадрата по ломаной L0,N , N = 2N1(l0) + 1 заканчивается в точке
(a1 - l0, l0), если N1(l0) - нечетное целое число, и в точке (a1 - l0, a2 - l0),
если N1(l0) - четное целое число.
С учетом этого, используя (3.5), (4.8), функционал (2.9) на множестве (4.9)
можно представить в виде
J (l0) = (Eηξ-1C-2)L(l0)T (l0), l0 ∈ R0,
(4.10)
L(l0) = l20, T (l0) = t′1(l0) + (t′1(l0) + t′2(l0))N1(l0),
где T (l0) определяет гарантированное время поиска.
Таким образом, задача 1 сводится к нахождению параметра l∗0 ∈ R0, до-
ставляющего минимум в задаче
(4.11)
J∗
J (l∗0) = min L(l0)T (l0
).
l0∈R0
Функции L(l0) и T (l0) на множестве R0 принимают соответственно моно-
тонно возрастающие и монотонно убывающие дискретные значения. Мини-
мум в (4.11) в зависимости от соотношений между параметрами может дости-
гаться как во внутренней, так и в крайних точках множества (4.9). С учетом
этого проведены численные расчеты определения l∗0 при различных значе-
ниях параметров задачи. В частности, при a1 = 200 м, a2 = 100 м, a3 = 20 м,
C =1,W =1м/c2,V =0,25м/cминимальное значени
J∗ = 47271,4 м2c до-
стигается во внутренней точке R0: l∗0 = 4,35 м. Соответствующее количе-
ство полных перемещений с шагом сканирования hmax = 8,24 м (4.6) равно
N1 = 22 (4.8), a гарантированное время поиска - T = 541,07 c (4.10). Элек-
трический ток в цепи источника света и минимальная величина энергии, по-
требляемой источником света, определяются из (3.4), (4.10) при конкретных
значениях параметров R, E, η, ξ.
5. Заключение
Предложен простой способ управления движением динамического объек-
та в задаче поиска подвижного объекта в прямоугольной области с помощью
квадратной области постоянного размера и заданной освещенности. Получе-
но условие, гарантирующее успешное завершение поиска. Предложен алго-
ритм нахождения оптимального размера квадрата освещенности, при кото-
ром искомый объект обнаруживается за гарантированное время поиска при
минимальной световой энергозатрате.
СПИСОК ЛИТЕРАТУРЫ
1. Хорн Б.К.П. Зрение роботов. М.: Мир, 1989.
2. Аветисян В.В., Мартиросян С.Р. Гарантированный поиск целевого объекта
электромеханической системой при минимальных световых энергозатратах //
Изв. РАН. ТСУ. 2009. № 5. С. 151-164.
118
3. Черноусько Ф.Л. Управляемый поиск подвижного объекта // ПММ. 1980. Т. 44.
Вып. 1. С. 3-12.
4. Чхартишвили А.Г., Шикин Е.В. Динамический поиск объектов. Геометриче-
ский взгляд на проблему // ФПМ. 1995. Т. 1. Вып. 4. С. 827-862.
5. Аветисян В.В., Меликян Т.Т. О задаче гарантированного поиска подвижного
объекта в прямоугольной области // Изв. РАН. ТСУ. 1999. № 2. С. 31-39.
6. Аветисян В.В. Оптимальный по минимальному гарантированному времени по-
иск неподвижного объекта в прямоугольной области // Изв. РАН. ТСУ. 2002.
№ 1. С. 62-69.
7. Аветисян В.В. Управление поиском неподвижного объекта с целью захвата //
Изв. РАН. ТСУ. 2006. № 6. С. 160-168.
8. Черноусько Ф.Л., Болотник Н.Н., Градецкий В.Г. Манипуляционные роботы.
М: Наука, 1989.
9. Савельев И.В. Курс общей физики. Т. 3. М.: Наука, 1970.
10. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Матема-
тическая теория оптимальных процессов. М: Наука, 1983.
Статья представлена к публикации членом редколлегии Б.М. Миллером.
Поступила в редакцию 07.04.2019
После доработки 13.11.2019
Принята к публикации 28.11.2019
119