Автоматика и телемеханика, № 6, 2020
© 2020 г. Ю.Г. БУЛЫЧЕВ, д-р техн. наук (profbulychev@yandex.ru)
(АО “ВНИИ “Градиент”, Ростов-на-Дону)
НЕКОТОРЫЕ АСПЕКТЫ ИДЕНТИФИКАЦИИ ДИНАМИЧЕСКИХ
ОБЪЕКТОВ ПРИ НЕКОРРЕКТНЫХ УСЛОВИЯХ НАБЛЮДЕНИЯ
Решаются задачи численно-аналитического представления решения
уравнения, описывающего динамический объект и его измеряемого выхо-
да, а также оптимального вычисления значений непрерывных линейных
функционалов (числовых характеристик) от измеряемых функций на ос-
нове некорректных данных, содержащих не только флуктуационную по-
грешность, но и сингулярную помеху. Метод обеспечивает максимально
возможную декомпозицию вычислительных процедур, не требует выпол-
нения традиционных операций линеаризации и выбора начальных при-
ближений, а также не связан с расчетом спектральных коэффициентов в
конечных линейных комбинациях (с заданными базисными функциями),
описывающих интегральные кривые, измеряемые функции и сингуляр-
ную помеху.
Ключевые слова: идентификация, динамический объект, измеряемый вы-
ход, непрерывный линейный функционал, числовая характеристика, син-
гулярная помеха, некорректные наблюдения, автокомпенсационное оце-
нивание.
DOI: 10.31857/S0005231020060086
1. Введение
В различных областях, связанных с решением задач оптимального управ-
ления, оценивания, фильтрации, прогнозирования и распознавания образов
[1-12], возникает необходимость решения векторного обыкновенного диффе-
ренциального уравнения (например, уравнения свободного движения), соот-
ветствующего некоторому многомерному динамическому объекту (ДО). При
этом необходимо заранее строить приближенное аналитическое решение (тре-
буемого качества) для данного уравнения, которое должно зависеть от на-
чального условия и других характерных параметров, принимающих значе-
ния из заданного множества допустимости. Если ДО снабжен измеряемым
выходом, то также целесообразно иметь приближенное аналитическое описа-
ние (требуемого качества) данного выхода для указанного множества допу-
стимости. Кроме того, часто возникает необходимость оптимального оцени-
вания некоторых числовых характеристик (ЧХ) от измеряемых функций, к
которым можно отнести начальное условие, производные различного поряд-
ка, определенные интегралы, спектральные коэффициенты соответствующих
разложений и др., т.е. речь идет об оценке значений непрерывных линейных
функционалов [13-16]. Так, для триангуляционных комплексов пассивной ло-
кации движущихся излучающих целей весьма важной является задача на-
хождения производных от измеряемых пеленгов (азимута и угла места) для
131
каждой приемной позиции комплекса [5, 6]. Использование указанных ЧХ
позволяет решать актуальные задачи прогнозирования угловых траекторий
(например, при срыве и пропуске наблюдений) и отождествления пеленгов
группы движущихся излучающих целей для многопозиционного триангуля-
ционного комплекса [5].
В [13-16] развит эффективный в вычислительном плане метод оптималь-
ного автокомпенсационного оценивания ЧХ от информационного сообщения,
реализация которого наблюдается в аддитивной смеси с флуктуационным
шумом и сингулярной помехой (не исключается также наличие маскирующе-
го сигнала). Помеха на интервале наблюдения может многократно превосхо-
дить (по абсолютной величине) сумму реализаций информационного сообще-
ния и шума, т.е. речь идет о так называемых некорректных наблюдениях, с
которыми часто приходится сталкиваться на практике [5, 6, 13-16]. Достоин-
ство метода автокомпенсационного оценивания (инвариантного к сингуляр-
ной помехе) состоит в том, что он позволяет решать задачу вычисления ЧХ
без традиционного расширения пространства состояний и ориентирован не
только на гладкие, но и на кусочно-непрерывные помехи с известными и неиз-
вестными точками разрыва первого рода, когда на участке непрерывности
помеха описывается одним из базисов (априорно неизвестным), принадлежа-
щим конечному семейству возможных (для данной помехи) функциональных
базисов.
В [13] на основе идей автокомпенсационного оценивания [14-16] и опорных
интегральных кривых ([17] скалярный случай, [18] векторный случай)
развит метод численно-аналитического описания ДО (для заданной области
допустимости) и оценивания ЧХ его интегральной кривой по выборкам этой
кривой, содержащей флуктуационный шум и сингулярную помеху. К недо-
статкам такого метода можно отнести то, что рассматривается лишь ска-
лярный ДО, в качестве измеряемого параметра выступает непосредственно
интегральная кривая ДО, а это, как правило, не вполне соответствует по-
требностям практики. Для большинства прикладных задач более актуаль-
ным является оценивание ЧХ для векторного измеряемого выхода ДО.
Цель статьи разработать метод численно-аналитического описания ре-
шения дифференциального уравнения и измеряемого выхода многомерно-
го ДО для заданной области допустимости, а также оптимального оценива-
ния ЧХ измеряемых функций (сохраняя достоинства метода [13]) по резуль-
татам некорректных наблюдений. Очевидно, что возможная нелинейность,
отсутствие (как правило) общего решения соответствующего дифференци-
ального уравнения, его зависимость не только от времени, но и от других
характерных параметров (начального условия и коэффициентов правой ча-
сти уравнения) делают эту задачу нетривиальной.
2. Постановка задачи
Рассмотрим многомерный ДО, описываемый моделью
∕
dz
dt
f (t, z, η), z ∈ Gz ⊂ RI1 , η ∈ Gη ⊂ RI2 , t ∈ Gt = [t0, t0 + T ] ⊂ R1,
132
[
]T
где η =
ηi,i = 1,I2
вектор постоянных параметров неопределенности,
которые могут принимать значения из заданной области допустимости Gη =
= {[r1, p1] , [r2, p2] , . . . , [rI2 , pI2 ]},
[ri, di] ⊂ R1, i = 1, I2, z0 = z (t0) ∈ Gz0 =
= {[c1, d1] , [c2, d2] , . . . , [cI1 , dI1 ]}, Gz0 ⊆ Gz, [ci, di] ⊂ R1, i = 1, I1. Данная мо-
дель может рассматриваться как самостоятельно, так и в качестве уравнения
свободного движения для некоторого управляемого детерминированного или
[
]T
стохастического ДО. Вводя расширенный вектор x =
zT,ηT
∈RI1+I2 = RI и
учитывая, что dη/dt ≡ 0, приходим к другому описанию ДО в виде диффе-
ренциального уравнения
(2.1)
dx/dt = f(t, x), t ∈ Gt = [t0, t0 + T ] ⊂ R1, x ∈ RI ,
где x = x(t, x0) = [xi(t, x0), i = 1, I]T - решение уравнения с начальным услови-
ем x0 = x(t0, x0) = [xi0, i = 1, I]T ∈ Gx0, Gx0 = {x0 ∈ RI : ci ≤ xi0 ≤ di, i = 1, I} -
гиперпараллелепипед возможных начальных условий, f(t, x) - функция,
имеющая ту гладкость (по аргументам t и x), которая соответствует рассмат-
риваемому ДО и требуется по смыслу проводимых в дальнейшем выкладок.
Для уравнения (2.1) справедливо
[
]T
[
]T
f (t, x) =
fi(t,x),i = 1,I
=
fi (t,z,η) ,i = 1,I1
fj (t,z,η) ,j = I1 + 1,I
,
где
fj (t,z,η) ≡ 0, j = I1 + 1,I. При гладкой правой части f(t,x) (с учетом
существования всевозможных производных определенного порядка по t и x)
решение x (t, x0) уравнения (2.1) и его соответствующие частные производные
существуют и непрерывны в области Gxt = {Gx0, Gt} (см. [19, с. 124, 125]).
Будем полагать, что гладкие частные решения xi (t, x0) принадлежат про-
странству непрерывных функций C [Gxt] с равномерной сходимостью, при
этом норме этого пространства соответствует обозначение ∥·∥C[Gxt](см.[20,
с. 51, 52]).
Уравнению (2.1) можно поставить в соответствие приближенное анали-
тическое решение x = x (t, x0), где x0 = x (t0, x0), при этом в общем случае
[
]T
max|xi0 - xi0| = 0, i = 1,I. Считаем, что x = x(t,x0) =
xi (t,x0) ,i = 1,I
i
является ε0-приближенным по невязке решением [21]: max|xi0 -xi0|≤ε0,
i
dxi/dt = fi(t, x) + ϑi (t), max|ϑi (t)| ≤ ε0, t ∈ Gt. В дальнейшем близость
i,t
точной xi = xi (t, x0) и приближенной
xi = xi (t,x0) фазовых координат
ДО для фиксированного x0 будем характеризовать невязкой εxi (x0) =
= max|xi (t,x0) - xi (t,x0)|, соответственно для оценки близости их про-
t∈Gt
изводных первого порядка (по аргументу t) вводится невязка ε(1)xi (x0) =
= max|x(1)i (t,x0) - x(1)i (t,x0) |. Для оценки близости векторных решений
t∈Gt
x (t, x0), x (t, x0) и их производных x(1) (t, x0), x(1) (t, x0) используются невяз-
ки εx (x0) = maxεxi (x0) и εx1) (x0) = maxε(1)xi (x0) соответственно.
i
i
Зададимся также векторным уравнением измеряемого выхода ДО
(2.2)
y (t) = ϕ(t, x (t, x0)) ∈ RJ , t ∈ Gt,
133
[
]T
где y (t) =
yj (t,x0) ,j = 1,J
- вектор измеряемых функций с координата-
ми yj (t, x0), которые также принадлежат C [Gxt], ϕ(t, x) гладкая функция
своих аргументов (степень гладкости также определяется типом измеряемого
выхода рассматриваемого ДО).
На траекториях yj (t, x0) ∈ Cr [Gxt] вводится семейство Ω ЧХ (ω ∈ Ω), ко-
торые необходимы при решении тех или иных целевых задач, связанных с
наблюдением за конкретным ДО, при этом будем использовать представле-
ние ω {yj(t, x0)} = ωj {x0} ∈ R1.
Воспользуемся дискретными уравнениями наблюдения за ДО
(
)
(2.3)
hjn = yjn
x′0
+ sjn + ξjn, j = 1,J, n = 0,Nj,
где hjn = hj (tjn), yjn (x0) = yj (tjn, x0), sjn = sj (tjn), ξjn = ξj (tjn), tjn ∈ Gt.
В этом уравнении: x′0 ∈ Gx0 неизвестное начальное условие, sj (t) сингу-
лярная помеха, ξj (t) флуктуационная погрешность. Введение индекса j во
позволяет рассмотреть случай асинхронных изме-
=0
рений различных функций выхода ДО.
Помеху опишем в виде sj(t) = CTjΘj (t), где Cj = [cjp, p = 1, Msj ]T вектор
неизвестных спектральных коэффициентов, Θj (t) = [θjp(t), p = 1, Msj ]T
вектор заданных базисных функций, Msj заданное число степеней свобо-
ды (на практике часто прибегают к упрощениям Msj = Ms и Θj (t) = Θ (t)).
Вектор Θj (t), соответствующий yj (t, x0), может формироваться из семейства
базисных функций, которые в наибольшей степени соответствуют основным
факторам неопределенности, отвечающим различным наиболее вероятным
условиям наблюдения за ДО. Такое семейство должно предусматривать воз-
можность появления сингулярных помех самого разного типа, с которыми
можно столкнуться на практике при исследовании конкретного ДО в тех
или иных условиях наблюдения.
характеризуется нулевым ма-
=0
тематическим ожиданием и соответствующей невырожденной корреляцион-
ной матрицей KΞj .
Введем векторные обозначения:
[
]T
[
(
)
Hj =
hjn,n = 0,Nj
,
Yj =
yjn
x′0
,n = 0,Nj
]T ,
[
]T
[
]T
Sj =
sjn,n = 0,Nj
,
Ξj =
ξjn,n = 0,Nj
Это позволяет перейти от (2.3) к векторному уравнению наблюдения Hj =
= Yj + Sj + Ξj. Для фиксированного j ∈ 1,J из Ω выберем произвольную ЧХ
ω: yj (t,x0) → R1, в другой записи ω {yj (t,x0)} = ωj ∈ R1. На основе наблю-
дения Hj нужно дать оценку значения ωj, т.е. вычислить ЧХ измеряемой
функции yj (t, x0). Данную оценку будем искать в классе линейных оценок
(здесь и далее индекс∗ соответствует некоторой оценке)
ω∗j = PTjHj = PTj(Yj +Sj +Ξj) = PTjYj +PTjSj +PTjΞj = ω∗Yj +ω∗Sj +ω∗Ξj,
(2.4)
[
]T
где Pj =
pjn,n = 0,N
вектор искомых весовых коэффициентов.
134
В силу линейности процедуры оценивания (2.4) при фиксированном Pj
дисперсия ошибки вычисления характеристики ωj находится как
σ2j = PTjKjΞPj.
Выбор оптимального значения P∗j для вектора Pj соответствует критерию
P∗j = minσ2j,
Pj
при этом должны выполняться условия несмещенности оценки
PTjYj = ω {yj (t,x0)} = ωj
и ее инвариантности к помехе
PTjSj = 0.
Требуется с учетом (2.1)-(2.4): сформировать алгоритм построения чис-
ленно-аналитического решения x (t, x0); обсудить вопросы точности и опти-
мизации выбора параметров данного алгоритма; сформировать алгоритм по-
строения численно-аналитического выражения для измеряемого многомер-
ного выхода ДО; сформировать алгоритм нахождения оптимального векто-
ра P∗j и оценки ω∗j и рассмотреть возможность оценивания различных ЧХ на
основе наблюдений Hj ; исследовать методическую погрешность данного ал-
горитма; определить условия и границы применимости развиваемого метода,
дать комментарии к достигаемому вычислительному эффекту.
3. Численно-аналитическое решение дифференциального уравнения
динамического объекта (этап 1)
Для формирования решения уравнения (2.1) в области Gxt можно исполь-
зовать широко применяющуюся в общей теории приближенных методов [22]
математическую конструкцию
∑
(3.1)
xi (t,x0) =
βxikςxik (t,x0
),
i = 1,I,
∑
где
одномерная сумма по индексу k с заданным числом неизвестных
коэффициентов βxik и известных базисных ςxik (t, x0). Очевидно, что с учетом
гладкости решения xi (t, x0) число слагаемых в сумме можно подобрать так,
чтобы для любого сколь угодно малого δxi ≥ 0 обеспечивалось выполнение
условия εxi (x0) < δxi независимо от конкретного значения x0 ∈ Gx0. В част-
ном случае можно перейти от (3.1) к приближению на основе многомерного
многочлена (см. [23, с. 152])
∑
(3.2)
xi (t,x0) =
αximzm
,
i = 1,I,
∑
z = (t,x10,...,xI0),
многомерная сумма по мультиндексу m с заданным
числом неизвестных коэффициентов αxim. Представление (3.2) используется в
135
теореме Вейерштрасса [23], подтверждающей возможность наилучшего при-
ближения к xi (t, x0) в равномерной метрике для области Gxt. Для гладких
решений хорошее приближение можно получить на основе конструкции
(3.3)
xi (t,x0) = [Ψxi (t)]T BxiΛxi (x0
), i = 1,I,
где Ψxi (t) и Λxi (x0)
векторы заданных гладких базисных функций соот-
ветствующей размерности, Bxi матрица неизвестных коэффициентов. Ес-
ли в качестве координат векторов Ψxi (t) и Λxi (x0) использовать многомерные
многочлены с соответствующими мультиндексами (по аналогии с [23, с. 152]),
то представление (3.3) несложно получить из (3.1). На практике конструк-
ция (3.3) широко распространена для описания большого класса ДО.
Для расчета коэффициентов, фигурирующих в математических конструк-
циях (3.1)-(3.3), воспользуемся методом опорных интегральных кривых
(ОИК) решения дифференциальных уравнений [17, 18]. Обобщим метод ОИК
на векторное уравнение (2.1). Для этого в области Gx0 рассмотрим сетку, со-
стоящую из многомерных узлов x0(r) ∈ Gx0, r ∈ 1, Mx. Этим узлам поставим
(
)
в соответствие семейство ОИК xi(r) = xi
t,x0(r)
, i = 1,I, r = 1,Mx, которое
формируется на основе одного из известных высокоточных численных мето-
дов интегрирования. Погрешностями построения ОИК в дальнейшем будем
пренебрегать (по аналогии с [17, 18]). На практике данное семейство задается
таблично.
{
}
Теперь в области Gt задается временная сетка
t(ik)
, k = 1,Mti, объема
(
)
которой достаточно для представления фазовых координат xi
t,x0(r)
в об-
ласти Gxt с требуемой точностью. Далее с использованием семейства ОИК
формируется массив чисел
(
)
(3.4)
xi(rk) = xi
t(ik),x0(r)
,
i = 1,I, r = 1,Mx, k = 1,Mti.
Для нахождения неизвестных коэффициентов в формулах (3.1)-(3.3) можно
применять известные операторы Ex1, Ex2 и Ex3 (интерполяции или аппроксима-
ции [23-25]), при этом с учетом (3.4), используя эти операторы, вычисляются
указанные коэффициенты
{
}
{
}
{
}
(3.5)
Ex1 :
xi(rk)
→ {βxik} , Ex2 :
xi(rk)
→ {αxim} , Ex3 :
xi(rk)
→ {Bxi}.
При построении численно-аналитического решения x(t, x0) уравн{ния}2.1)
на базе (3.5) в общем случае применяется неравномерная сетка
t(ik)
по
аргументу t. Кроме того, для многих ДО зависимость фазовой координаты
xi (t,x0) от x0 является слабо выраженной, что существенно снижает объ-
ем Mx вычислительной сетки по начальному условию x0 и упрощает рассмот-
ренную процедуру (интерполяционную или аппроксимационную) построения
численно-аналитического решения x (t, x0) уравнения (2.1).
Таким образом, априорно на первом этапе (до получения измеритель-
ных данных) строится приближенное аналитическое решение x (t, x0) урав-
нения (2.1), обеспечивающее в области Gxt требуемую для практики точ-
ность анализа ДО. В число параметров, позволяющих достичь такой точ-
ности, можно отнести объемы используемых сеток (Mti и Mx), кроме того,
136
важен выбор систем базисных функций в приближениях (3.1)-(3.3) с учетом
вида правой части уравнения (2.1).
Конкретизируем описанную процедуру на случай, когда при построении
решения на базе (3.3) используются фундаментальные многочлены интер-
поляции (как тензорное произведение одномерных фундаментальных мно-
гочленов [23]). С {той }ль{ в области}Gx0 зададим многомерную вычис-
лительную сетку
x0(m)
=
x0(m1,...,mI )
(где m = (m1, . . . , mI ) мультин-
декс, mi = 1, Mxi, i = 1, I,
∏Mxi = Mx,∏ знак умножения по индексу
i = 1,I) и для всех ее узлов построим семейство ОИК xi(m) = xi(m1,...,mI) =
(
)
(
)
=xi
t,x0(m)
=xi
t, x0(m1,...,mI)
, i = 1,I. На отрезке ci ≤ xi0 ≤ di задаются
узлы xi0(1), . . . , xi0(Mxi) и принимается, что
∏
(
)
(
)
ψxik (t) = Li(k) (t) =
t-ti(j)
/
ti(k) - ti(j)
j=1,j=k
В этом случае решение (3.3) имеет вид
∑∑
xi (t,x0) =
xi(mk)Li(k) (t)Li(m) (x0) , i = 1,I,
k=1 m
∑
гдеm многомерная сумма по мультиндексу m,
∏
Li(m) (x0) =
L(mi) (xi0),
i=1
∑
(
)
(
)
L(mi) (xi0) =
xi0 - xi0(q)
/
xi0(mi) - xi0(q)
q=1,q=mi
Если xi (t, x0) является ε0-приближенным по невязке решением, то для
погрешности εxi (x0) представления фазовой координаты xi (t, x0) с исполь-
зованием xi (t, x0) справедлива оценка (по аналогии с [21])
]
[(
)
εxi (x0) ≤ ε0 L-10 + 1
exp (L0 |t - t0|) - L-1
,
0
где t ∈ Gt, x0 ∈ Gx0, L0
константа Липшица для правой части уравне-
ния (2.1). Соответственно для оценки близости точного x (t, x0) и прибли-
женного x (t, x0) векторных решений применима оценка
{√
(
)
[
(
)
]}
εx (x0) ≤ ε0
I exp
L0I2T
+ (L0I)-1
exp
L0I2T
-1
Опираясь на [23-25], можно также оценить вклад наследственной погреш-
ности и погрешности округлений в результирующую ошибку построения при-
ближенного решения уравнения (2.1). При учете погрешностей интерполяции
и аппроксимации на качество формируемого численно-аналитического реше-
ния достаточно воспользоваться оценками, которые приводятся в [23-25].
137
4. Численно-аналитическое описание измеряемого выхода
динамического объекта (этап 1)
Точный выход ДО можно представить в виде
y (t) = ϕ(t, x (t, x0)) = γ (t, x0) ∈ RJ ,
при этом ϕ : Gxt → Gyt гладкая функция по t и x0. Соответственно для
приближенного выхода ДО имеем
y (t) = ϕ(t, x (t, x0)) = γ (t, x0) ∈ RJ .
По аналогии с разделом 3 для численно-аналитического описания изме-
ряемого выхода ДО можно использовать семейство ОИК, при этом также
применяем принцип гладкой зависимости y (t) = γ (t, x0) от своих аргумен-
(
)
тов. Для этой цели семейству ОИК x(r) = x
t,x0(r)
, r = 1,Mx, поставим в
соответствие семейство выходных траекторий
(
(
))
(
)
yj(r) (t) = ϕj
t,x
t,x0(r)
=γj
t,x0(r)
,
j ∈ 1,J, r = 1,Mx,
которые представим массивом чисел
(
(
))
(
)
yj(rk) = ϕj
ti(k),x
ti(k),x0(r)
=γj
ti(k),x0(r)
,
j ∈ 1,J, r = 1,Mx, k = 1,K.
Теперь по аналогии с (3.5) можно получить оценки неизвестных коэффи-
циентов в приближенных выражениях для измеряемого выхода ДО, если в
формулах (3.1)-(3.3) заменить символ x на y, а символ i на j:
{
}
{
}
{
}
{
}
{
}
{
}
Ey1 :
yj(rk)
→ βy
,
Ey2 :
yj(rk)
→ αy
,
Ey3 :
yj(rk)
→ By
jk
jm
j
По аналогии с (3.3) выход ДО представим так:
[
]T
(4.1)
yj (t) = Ψj (t)
ByjΛyj (x0
), j = 1,J,
∑∑
(4.2)
yj (t) = γj (t, x0) =
yj(mk)Lj(k) (t)Lj(m) (x0
),
j = 1,J.
k=1 m
Формулы (4.1) и (4.2) являются удобными в численно-аналитических рас-
четах и в максимальной степени ориентированы на оперативные вычисления.
5. Оценивание числовых характеристик измеряемых параметров
динамического объекта (этап 2)
Этап 2 связан непосредственно с обработкой поступающих измерений и
согласно современной концепции должен характеризоваться минимальными
вычислительными затратами, заданной оперативностью и устойчивостью к
138
сингулярной помехе. Выполнить эти требования возможно, если воспользо-
ваться процедурой автокомпенсационного оценивания ЧХ при некорректных
условиях наблюдения. С учетом (4.1) выходную траекторию ДО зададим в
виде
[
(
)
(
(5.1)
yj (t) = γj
t,x′0
= Byj
x′0
)]T Ψyj(t) =
YTjΨyj
(t), j = 1, J,
[
(
)
гд
Yj =
yj
t(k)
,k = 1,Mt
]T = Byj (x′0) вектор временных отсчетов траек-
{
}Mt
тории yj (t) = γj (t, x′0) на вычислительной сетке
t(k)
, x′0 ∈Gx0
неиз-
k=1
вестное начальное условие, фигурирующее в уравнении наблюдения (2.3),
[
]T
Ψyj(t) = ψyjk(t),k = 1,Mt
вектор базисных функций. Полагаем, что
(
)
(
)
γj
t(k),x′0
=
YTjΨyj(t(k)) ≈ yj
t(k)
,
при этом вектор временных отсчетов координаты yjn = γj (tjn, x0) на измери-
(где Nj ≫ Mt) приближенно может быть задан в виде[
=0
]
Yj
YTjΨyj, j = 1,J, где Ψyj = ψy
,k = 1,Mt,n = 0,Nj
матрица отсчетов
jkn
ψyjkn = ψyjk (tjn) функций ψyjk(t).
Условие несмещенности оценки ЧХ (см. раздел 2) принимает вид
[
{
}]T
(
)T
PTjYj = ω {γj (t,x0)} = ω Ψyj(t)
Yj = PT
j
Ψyj
Yj = ωj,
{
}
[
{
}
]T
где ω Ψyj(t)
= ω ψyjk (t) ,k = 1,Mt
вектор значений ЧХ ω на базис-
ных функциях ψyjk(t). Отсюда следует окончательное условие несмещенности
{
}
(5.2)
ΨyjPj = ω Ψyj(t)
Поскольку необходимо, чтобы
{
}
ω {sj (t)} = ω
CTjΘj (t)
= CTj ω {Θj (t)} = PTj Sj = 0,
то условие инвариантности (см. раздел 2) можно преобразовать к виду
(5.3)
ΘjPj = [0]Msj×1,
где [0]Msj ×1нулевойвектор-столбецразмерностиMsj×1,
[
]
Θj =
θjsn, s = 1,Msj, n = 0,Nj
матрица отсчетов θjsn = θjs (tjn) ба-
зисных функций сингулярной помехи.
Задача нахождения оптимальной оценки P∗j вектора Pj решается мето-
дом условной оптимизации Лагранжа на базе критерия P∗j = min σ2j с учетом
Pj
139
ограничений (5.2) и (5.3). В итоге получаем процедуру автокоменсационного
оценивания ЧХ применительно к измеряемому выходу ДО
[
(
)T
(
)T]-1
{
}
(5.4)
P∗j = Zj1 Ψyj
ΨyZj1
Ψyj
ω Ψyj(t) ,
j
[
]T
(5.5)
ω∗j0 =
P∗j
Hj = HTjP∗j,
(
)-1
где Zj1 = Zj2K-1jΞ, Zj2 = Ej - K-1jΞΘTj ΘjK-1jΞΘTj
Θj, Ej единичная мат-
рица.
Из (5.4) непосредственно вытекает, что матрицы KjΞ, ΘjK-1jΞΘTj и
(
)T
ΨyjZj1
Ψyj
должны быть невырожденными и хорошо обусловленными, что
соответствует получению единственного и устойчивого решения P∗j. Данный
вопрос относится к сфере оптимального планирования измерительного экс-
перимента и в данной статье не рассматривается. При рациональном выборе
основных параметров процедуры (5.4), (5.5) можно избежать необходимости
решения некорректной (с вычислительной точки зрения) задачи оценивания.
Для дисперсии оптимальной оценки ω∗j числовой характеристики ωj имеем
выражение
[
]T
σ2j =
P∗j
KjΞP∗j =
(5.6)
[
{
}]T
(
)T
{
}
= ω Ψyj(t)
Wj1ΨyjZTKjΞZj1
Ψyj
Wj2ω Ψyj(t) ,
j1
[
[
(
)T]-1
(
)T]-1
где Wj1 = Ψyj (Zj1)T Ψyj
,Wj2 = ΨyZj1
Ψyj
j
Выражения (5.4)-(5.6) имеют явный векторно-матричный вид, что суще-
ственно упрощает их применение в любой вычислительной среде. Оценка ЧХ
(5.5) формируется сразу, без промежуточного вычисления спектральных ко-
эффициентов измеряемой функции и сингулярной помехи, т.е. без расшире-
ния пространства состояний. Кроме того, эта оценка является несмещенной,
поскольку достигается инвариантность результата оценивания к сингуляр-
ной помехе. В силу этого алгоритм нахождения оптимального значения ЧХ
на базе выражений (5.4) и (5.5) можно отнести к классу линейных автоком-
пенсационных алгоритмов.
Следует отметить, что задачу оценивания ЧХ можно было бы решать тра-
диционно путем расширения пространства состояний. Но тогда в вектор
оцениваемых параметров надо было бы включить все спектральные коэффи-
циенты, входящие в линейные комбинации измеряемой функции и сингуляр-
ной помехи. Оценив эти коэффициенты, далее можно находить искомую ЧХ
с учетом этих комбинаций. Однако в [13-16] показано (а также это следует
из (5.4) и (5.5)), что можно сразу найти оценку скалярной ЧХ (без вычисле-
ния указанных коэффициентов), оперируя с обратными матрицами гораздо
меньшего размера (что очень полезно с вычислительной точки зрения).
Дадим оценку усредненной методической погрешности δj оценивания ЧХ
применительно к представлению (4.1). Поскольку в (4.1) не учитывается
140
“хвост”
[
]T
Δj (t,x0) = γj (t,x0) - Ψyj (t)
ByjΛyj (x0)
бесконечного ряда, то имеем (используя символ математического ожида-
ния M [·]), что
[
}
{[
]T
[
]
δj = M
ωj - ω∗j
= M ω Ψyj (t)
ByjΛyj (x0)
+
]
+ ω {Δj (t,x0)} - ω∗Yj - ω∗Δj - ω∗Sj - ω∗Ξj ,
где
(
)T
(
)T
[
]T
ω∗Yj =
P∗j
Yj, ω∗Δj =
P∗j
Δj, Δj =
Δ(tn,xj0),n = 0,N
,
ω∗Sj = PTjSj, ω∗Ξj = PTjΞj.
}
{[
]T
Так как ω Ψyj (t)
ByjΛyj (x0)
= ω∗yj (условие несмещенности), ω∗Sj =
= PTj Sj = 0 (условие инвариантности) и M[Ξj] = 0 (шум является центри-
рованным), то вытекает равенство
[
]
(
)T
(
)T
δj = M ω {Δj (t,x0)} -
P∗j
Δj -
P∗j
Ξj
=
(5.7)
(
)
= ω {Δj (t,x0)} -
P∗j
TΔj.
Таким образом, методическая погрешность оценивания в среднем опре-
деляется значением ЧХ на “хвосте” бесконечного ряда и линейной оценкой
этого значения.
Необходимые и достаточные условия существования и единственности
решения (5.4), (5.5) задачи оценивания ЧХ измеряемого выхода ДО требуют
невырожденности и соблюдения некоторых ограничений на ранги ряда мат-
риц. Выполнение этих условий на практике обеспечивается рациональным
выбором векторов Ψyj (t) и Θj (t) базисных функций, числа измерительных
и их расположением, числа степеней свободы в моделях при-
=0
ближенного решения дифференциального уравнения и измеряемого выхода
ДО, а также сингулярной помехи. Все эти вопросы относятся к планированию
измерительного эксперимента. Используя результаты из [9, 10], можно полу-
чить оптимальные оценки параметров предлагаемого метода с учетом стати-
стических характеристик флуктуационных погрешностей измерений. В ста-
тье не рассматриваются эти вопросы, чтобы не перегружать объем статьи,
хотя они и важны для практики, но являются второстепенными для теории
результатами.
Теперь рассмотрим вопрос, связанный с параметрической идентификаци-
ей j-го измеряемого выхода ДО (где j ∈ 1, J). Для этого в соответствии с
141
алгоритмом (5.4), (5.5) необходимо оценить вектор коэффициенто
Yj в мо-
дели (5.1). Согласно данному алгоритму находятся оптимальные оценки y∗j(k)
отсчетов измеряемой функции yj (t) = γj (t, x′0) в узлах t(k), k = 1, Mt, с уче-
том некорректных наблюдений (2.3). Если истинные значения отсчетов yj(k)
рассматривать как ЧХ измеряемой функции yj (t) = γj (t, x′0) с фиксирован-
ным (но неизвестным) начальным условием x′0, т.е. yj(k) = ω {γj (t, x′0)}, то
можно воспользоваться оценками
[
(
)T
(
)T]-1
{
}
(5.8)
ω∗j = y∗j(k) = HTjZj1 Ψyj
ΨyZj1
Ψyj
ω Ψyj(t)
,
j = 0,J,
j
положив ω{Ψyj (t)} = [0,0, . . . ,1,0, . . . , 0]T - нулевой столбец с единицей в k-й
позиции. Зная оценк
Y∗j=[y∗j(k),k=1,Mt]T вектор
Yj =[yj(t(k)),k =1,Mt]T,
формируем оценки выходных траекторий y∗j(t) = [Ψyj(t)]T
Y ∗j , j = 1,J, для рас-
сматриваемого ДО.
Таким образом, несмотря на то что рассматриваемый ДО и его выход явля-
ются нелинейными, оценивание ЧХ на выходных траекториях ДО осуществ-
ляется без привлечения традиционно используемых процедур линеаризации
нелинейных функций.
6. Некоторые обобщения, вычислительные аспекты,
практические рекомендации
Задачу оценивания, рассмотренную в разделе 5, также можно обоб-
щить на многомерный случай, который связан с оценкой векторной ЧХ ω =
= [ωd, d = 1, D]T на выходных траекториях ДО. В этом случае оценка нахо-
дится в векторно-матричном виде ω∗j = P∗jHj , где
P∗j = [p∗jdn, d = 1,D, n = 0,N]
оценка матрицы Pj весовых коэффициентов. Данная матрица находит-
ся из условия минимизации следа корреляционной матрицы Kj = Pj KjΞPTj
этой оценки, кроме того, также должны быть выполнены условия несмещен-
ности и инвариантности, рассмотренные в разделе 5, по отношению ко всем
координатам вектора ω∗j. Несложный анализ показывает, что данная задача
развивается на D подзадач, связанных с оцениванием по каждой координате
[
вектора ω =
ωd,d = 1,D
]T, т.е. достигается максимально возможная деком-
позиция вычислительной процедуры.
Для оценки вычислительной эффективности развитого автокомпенсацион-
ного метода оценивания ЧХ измеряемых функций ДО достаточно воспользо-
ваться результатами из [15], которые демонстрируют возможность реализа-
ции процедуры оценивания в некорректных условиях наблюдения на основе
распределенной обработки данных. В качестве показателя вычислительной
эффективности метода можно принять время, затрачиваемое на получение
искомых оценок. Данное время определяется быстродействием распределен-
ной среды, общим числом операций, необходимых при реализации метода, и
142
способом программирования. В [15] показано, что поскольку процедура оце-
нивания не требует расширения пространства состояний, то реализуемые на
ее основе алгоритмы позволяют достичь значительного выигрыша в вычис-
лительной эффективности. В [15] дана количественная оценка достигаемого
выигрыша на конкретном примере, связанном с решением известной задачи
сглаживания результатов измерений, когда в качестве ЧХ выступает зна-
чение измеряемой функции в фиксированной точке интервала наблюдения.
Показано, что для принятых исходных данных выигрыш по сравнению с из-
вестным расширенным методом наименьших квадратов составил 1,47 раза.
В качестве ЧХ могут рассматриваться выборочное значение j-й изме-
ряемой функции в произвольной точке t′ ∈ Gt (в этом случае ω {Ψy (t)} =
[
]T
=
ψyk (t′) ,k = 1,Mt
), значение производной r-го порядка в точке t′ (в этом
случае ω {Ψy (t)} = [ψ(r)yk (t′) , k = 1, Mt]T), значение определенного интеграла
∫ t0+T
на отрезке [t0, t0 + T ] (в этом случае ω {Ψy (t)} = [
ψyk (τ)dτ,k = 1,Mt]T)
t0
и др.
Предложенный алгоритм оценивания можно выполнять на подвижной сет-
ке (“скользящем окне”) {tj,r+l-1}nj /2l=-¯n
∈ Gt, где (nj+1 + 1) объем “сколь-
j /2
зящего окна”, r характеризует положение его центрального узла в момент
времени tjr ∈ Gt, а символ j позволяет занумеровать узлы “скользящего ок-
на” при фиксированном r. Очевидно, что для формирования полномерно-
го “скользящего окна” объемом nj+1 + 1 должны выполняться ограничения
1 + nj/2 ≤ r ≤ 1 + Nj - nj/2 и -nj/2 ≤ l ≤ nj/2, в противном случае алго-
ритм оценивания реализуется на неполномерном “скользящем окне” нарас-
тающего объема (это относится к краям временного отрезка [t0, T ]). Но и в
этом случае имеется ограничение этого объема должно быть достаточно
для обеспечения невырожденности задачи оценивания.
Известно, что точность оценивания сглаженного значения измеряемой
функции наибольшая в середине “скользящего окна”, что также в полной
мере относится к нахождению различных ЧХ (например, производных), ко-
торые соответствуют некоторой произвольной точке t′ ∈ Gt, являющейся од-
ним из узлов подвижной сетки. Алгоритм оценивания несложно реализовать
и на адаптивном “скользящем окне”, объем которого меняется оптимальным
образом с учетом условий наблюдения за ДО.
7. Иллюстративный пример
Оценим эффективность предлагаемого метода применительно к ракете,
движущейся в однородном поле силы тяжести, при линейном законе расхода
массы и отсутствии сопротивления среды (см. [12, с. 31-34]). Криволинейное
движение ракеты описывается системой дифференциальных уравнений
dz1/dt = -g0z-12, dz2/dt = cvη (1 - ηt)-1 - g0th (z1) ,
где время измеряется в секундах, z1 = x1
фазовая координата (безраз-
мерная), соответствующая углу β (рад) наклона вектора скорости к гори-
зонту, z1 = ln [tg (π/4 + β/2)] , z2 = x2
величина скорости ракеты (м/с),
143
g0
ускорение силы тяжести (м/с2), η = x3 удельный расход массы раке-
ты (с-1), cv
относительная скорость отбрасываемых частиц (м/с). Далее
полагаем, что g0 = 9,80665 (взято из справочника), cv = 2290, t0 = 0, T = 70,
xi0 = xi (0) ∈ Gxi = [ci,di], i = 1,3, c1 = 1,0107, d1 = 2,4362, c2 = 100, d2 = 200,
c3 = r = 0,0060, d3 = p = 0,0100, в качестве измеряемой функции y использу-
ем угол β, т.е. J = 1, y = β (с учетом скалярного выхода ДО в используемых
далее формулах индекс j опускается).
Для построения численно-аналитического решения принято I1 = 2 и
I2 = 1, следовательно, I = I1 + I2 = 3, при этом: f1(t,x) = -g0x-12, f2(t,x) =
= cvx3(1 - x3t)-1 - g0th(x1), f3(t,x) ≡ 0, m = (m1,m2,m3), Mx1 = 4, Mx2 = 6,
Mx3 = 5, Mx = Mx1Mx2Mx3 = 120, Mt = 11, Ms = 2, ψxk(t) = L(k)(t), L(m)(x0) =
= L(m1,m2,m3)(x01,x02,x03) = L(m1)(x10)L(m2)(x20)L(m3)(x30), t(k) = 7(k - 1),
k = 1,11.
При расчетах погрешность операций над числами составляла 2,2 · 10-16, а
результаты вычислений представлены с точностью до четвертого знака после
запятой. Вычисления выполнялись на компьютере средней мощности, аппа-
ратная часть которого построена на базе процессора Intel Core i7 с оператив-
ной памятью объемом 8 Гб и твердотельным диском Samsung 850 Pro. В ка-
честве операционной системы использовалась Windows 10 Pro, а среды чис-
ленного моделирования MATLAB R2018b. Средняя загрузка ресурсов про-
цессора составила 45 %, а оперативной памяти
80 %. При построении при-
ближенного аналитического решения на базе полиномов Лагранжа исполь-
зовалась откомпилированная функция [26], написанная на языке MATLAB,
что позволило увеличить оперативность вычислений в 40 раз за счет опти-
мизации работы с циклическими операциями [27].
Этап 1. Для построения семейства ОИК применялся метод Рунге-Кутты
4-го порядка с контролируемой точностью 10-5. Время вычислений в части
формирования семейства ОИК составило 17,3 секунд, в части приближенного
аналитического решения на основе построенного семейства ОИК
195,7 се-
кунд. В итоге общее время расчета составило 222,5 секунд (с учетом подго-
товки исходных данных и представления результатов расчета).
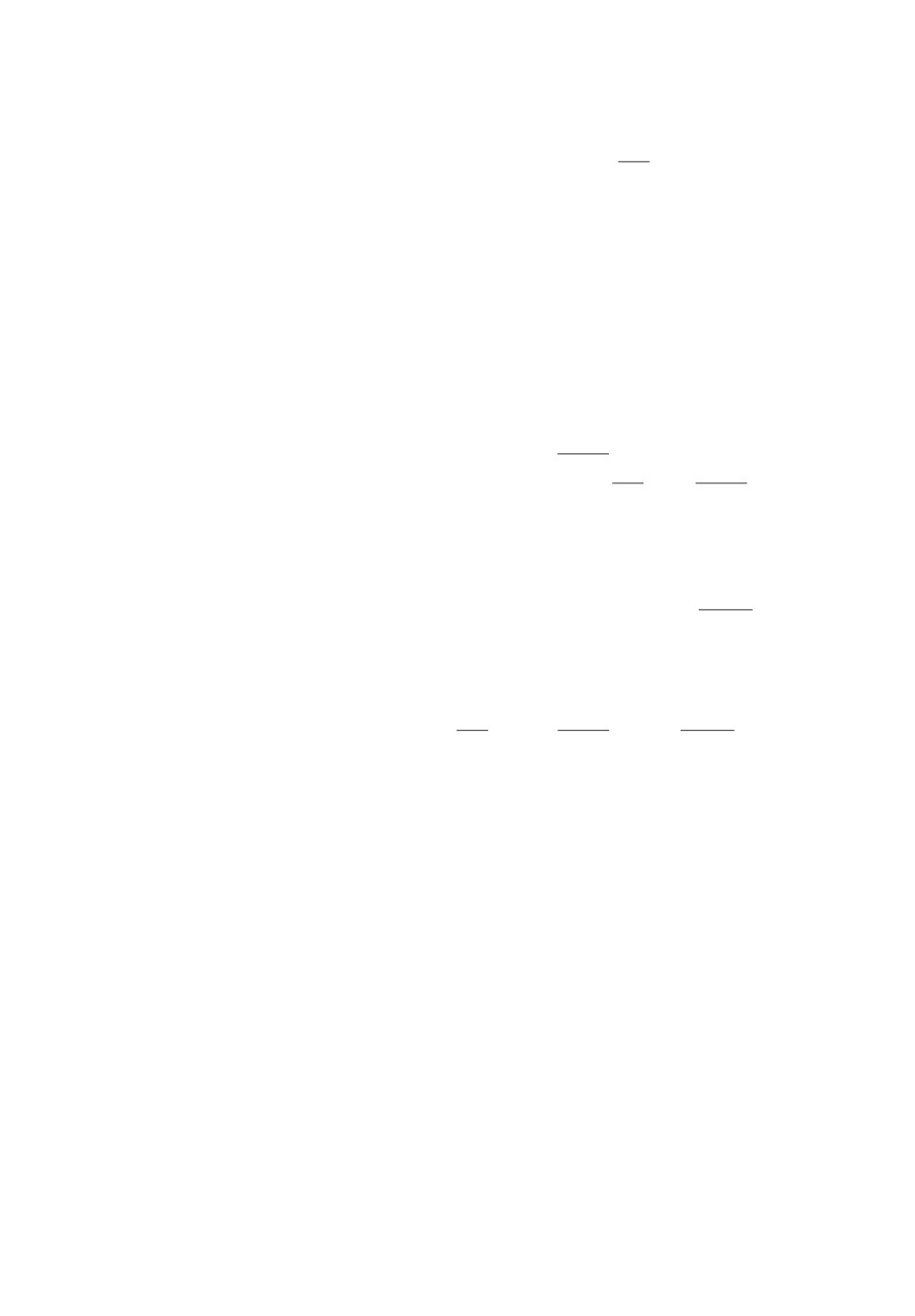
С целью наглядности результатов моделирования для оценки точности ис-
пользовалась частная невязка εxi = |xi (t, x0) - xi (t, x0)|, i ∈ {1, 2}, как функ-
ция от времени t и начального условия x0. Так, на рис. 1 представлена зависи-
мость частной невязки εx1 от t и x10 для фиксированных значений x20 = 104
и x30 = 0,0063. При этом на исходной области {Gx0,Gt} имеем общую
невязку εx1 = maxεx1 (x0) = 0,0020 (где εx1 (x0) = max|x1 (t,x0) - x1 (t,x0)|),
x0
t
что составляет
0,3237 %. Данный максимум соответствует{узлу (}= 27,
x10 = 2,1466, x20 = 104, x30 = 0,0063). На усеченной области
Gx0,Gt
(где
Gx0 = {[1,3170; 1,7454] , [120; 180] , [0, 0070; 0,0090]} и Gt = [7,63]) получили об-
щую невязку εx1 = 0,0004, что составляет 0,1853 %. Данный максимум соот-
ветствует узлу (t = 36, x10 = 1,5065, x20 = 128, x30 = 0,0070).
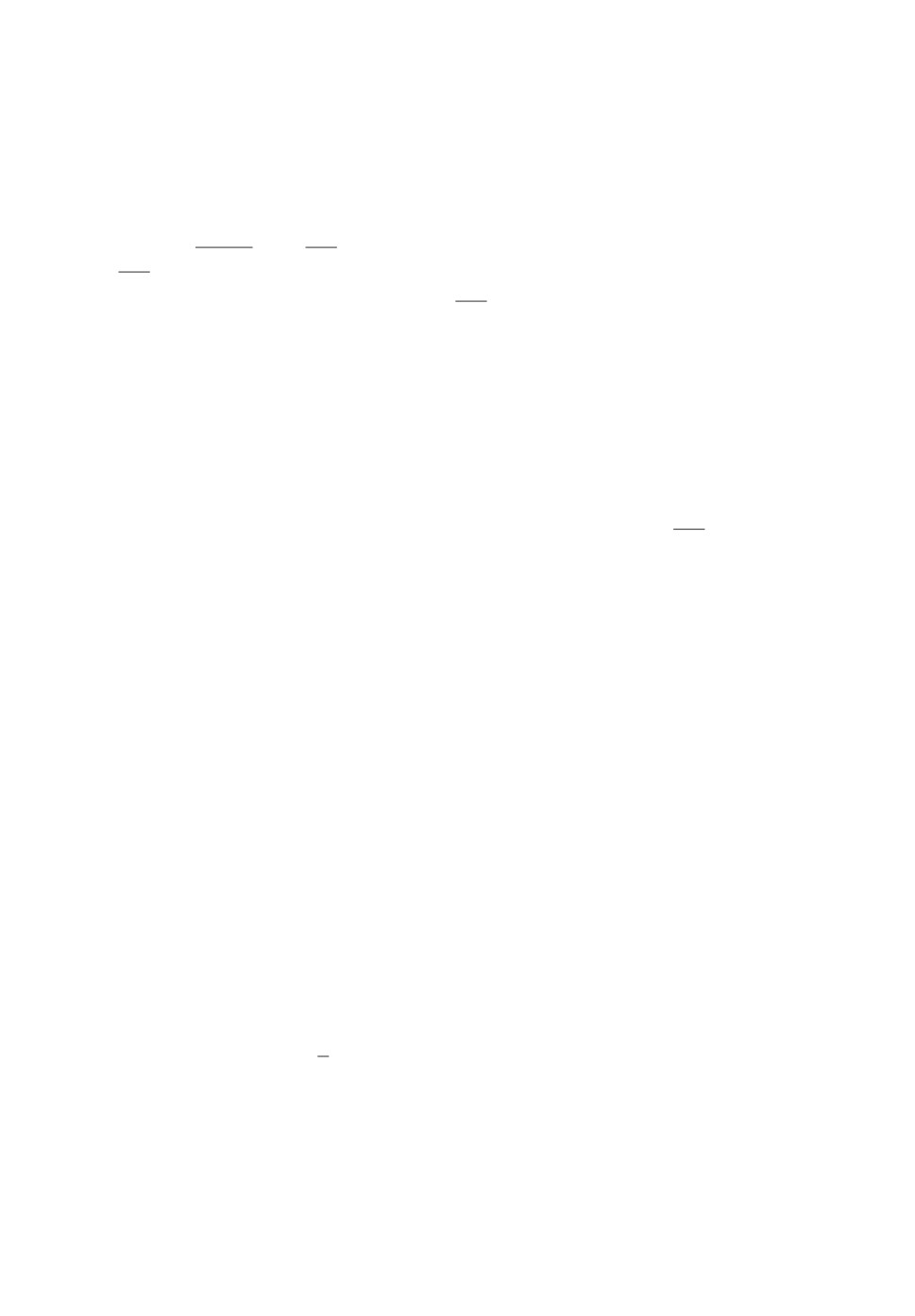
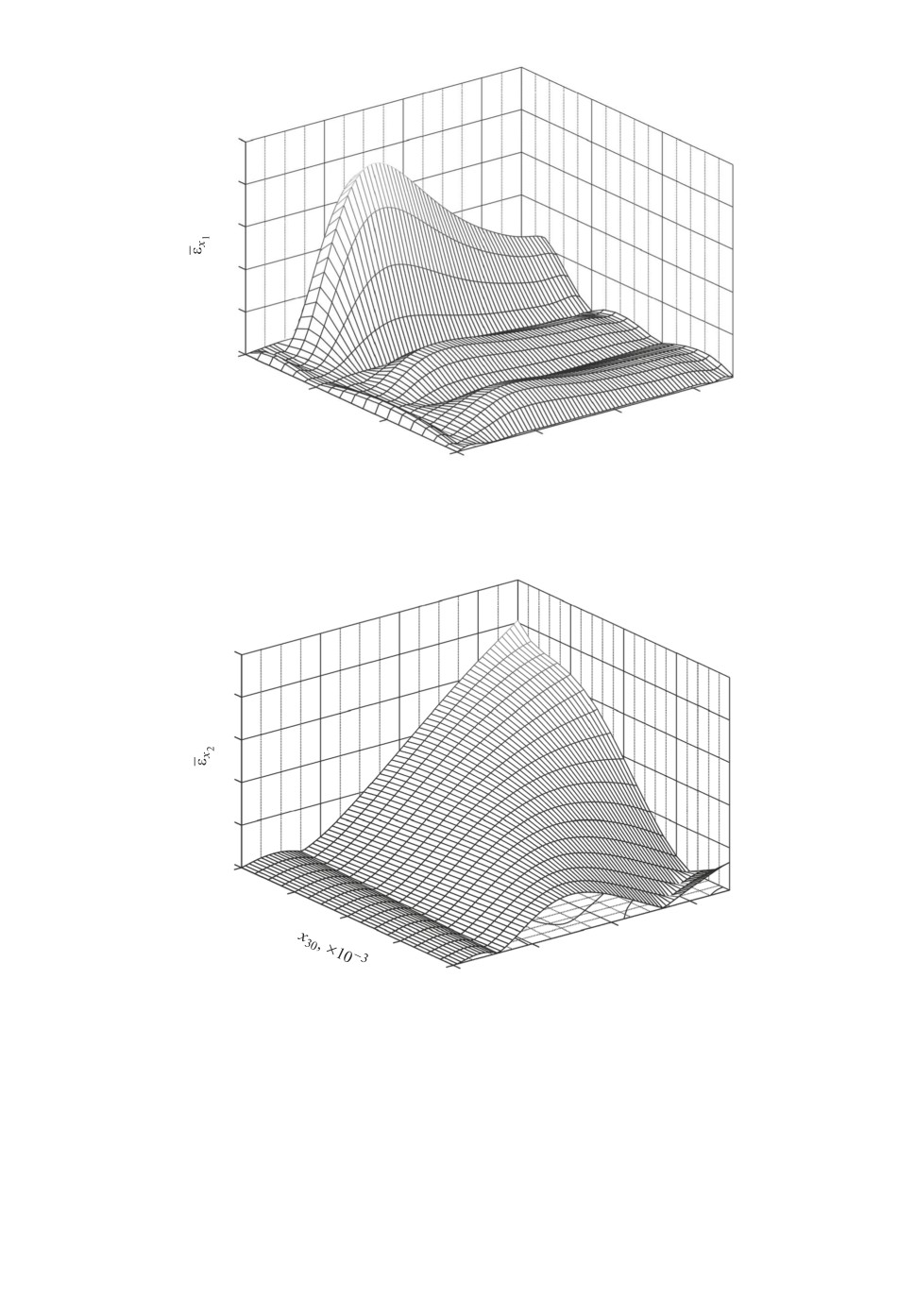
На рис. 2 представлена зависимость частной невязки εx2 от t и x30 для
фиксированных значений x10 = 2,1466 и x20 = 124. При этом на исходной обла-
сти {Gx0, Gt} имеем общую невязку εx2 = max εx2(x0) = 4,0542 (где εx2(x0) =
x0
144
´10-3
2,5
2,0
1,5
1,0
0,5
0
80
70
60
40
x10
60
20
t
50 0
Рис. 1. Зависимость невязки частной εx1 от t и x10 для фиксированных зна-
чений x20 и x30.
5
4
3
2
1
0
10
9
60
8
40
7
20
t
6
0
Рис. 2. Зависимость частной невязки εx2 от t и x30 для фиксированных зна-
чений x10 и x20.
= max|x2 (t,x0) - x2 (t,x0)|), что составляет 0,1744%. Данный максимум со-
t
ответствует у{лу (t =}70, x10 = 2,1466, x20 = 124, x30 = 0,0100). На усечен-
ной области
Gx0,Gt
получили общую невязку εx2 = 0,6355, что состав-
ляет 0,0367 %. Данный максимум соответствует узлу (t = 63, x10 = 1,5065,
x20 = 180, x30 = 0,0090).
145
0,10
0,08
0,06
0,04
0,02
0
80
70
60
40
x10
60
20
t
50 0
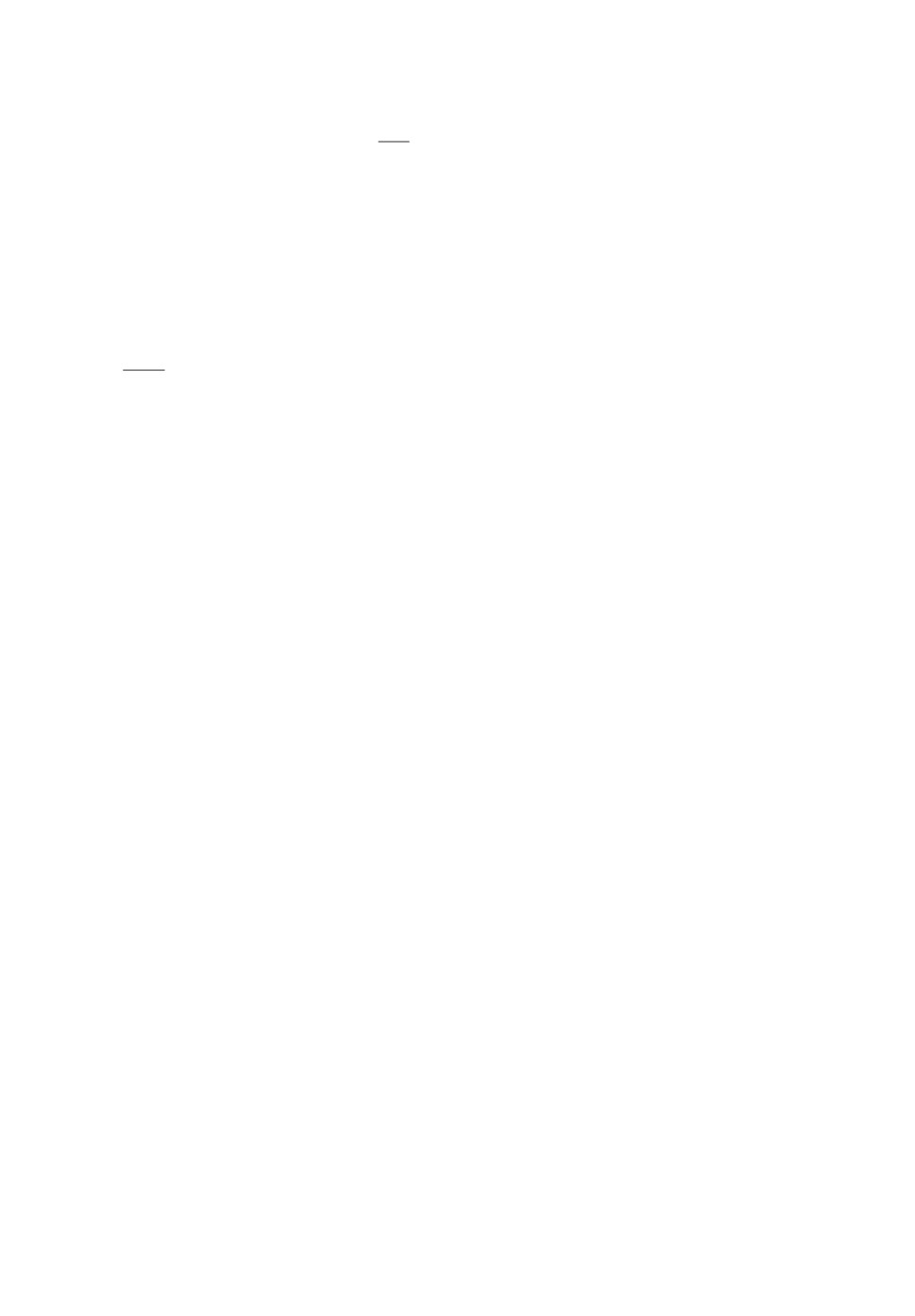
Рис. 3. Зависимость частной невязки εβ от t и x10 для фиксированных значе-
ний x20 и x30.
Учитывая, что выход ДО может быть представлен в виде
y = β = 2{arctg[exp(z1)] - π/4},
на рис. 3 представлен трехмерный график частной невязки
εβ = |γ (t, x0) - γ∗ (t, x0)|
как функции от t и x10 для фиксированных значений x20 = 108 и x30 = 0,0063.
Соответственно на рис. 4 рассмотрен случай зависимости εβ от t и x30 для
фиксированных значений x10 = 2,1466 и x20 = 108. При этом на исходной об-
ласти {Gx0, Gt} имеем общую невязку εβ = max εβ(x0) = 0,0988 (где εβ (x0) =
x0
= max
β (t, x0) - β (t, x0) |), что составляет 0,3303 %. Данный максимум со-
t
ответствует у{лу (t =}31, x10 = 2,1466, x20 = 108, x30 = 0,0063). На усечен-
ной области
Gx0,Gt
получили общую невязку εβ = 0,0199, что состав-
ляет 0,2197 %. Данный максимум соответствует узлу (t = 38, x10 = 1,5065,
x20 = 128, x30 = 0,0070).
Соответственно для производной y(1) = β(1) на исходной области {Gx0, Gt}
имеем общую невязку
ε(1)β = maxε(1)β(x0) = 5,4919
x0
(где ε(1)β(x0) = max
β(1) (t,x0) - β(1) (t,x0) |), что составляет 6,9520 %. Дан-
t
ный максимум соответствует узлу (t = 1, x10 = 2,4362, x20 = 100, x30 = 0,0060).
}
{Gx
На усеченной области
0,Gt
получили общую невязку ε(1)β = 3,1612,
146
0,10
0,08
0,06
0,04
0,02
0
14
12
60
10
40
8
20
t
6
0
Рис. 4. Зависимость частной невязки εβ от t и x30 для фиксированных значе-
ний x10 и x20.
что составляет
5,5860 %. Данный максимум соответствует узлу (t = 8,
x10 = 1,7354, x20 = 120, x30 = 0,0070).
Результаты численного эксперимента наглядно показывают возможность
качественного описания как входных, так и выходных параметров ДО с помо-
щью разработанного численно-аналитического метода. Для уменьшения нега-
тивных краевых эффектов необходимо сужать области задания параметров
tиx0.
Этап 2. При реализации данного этапа использовались также следую-
щие данные: x′10 = 1,7354, x′20 = 112, x′30 = 0,0800, s (t) = c1θ1 (t) + c2θ2 (t),
c1 = 5, θ1 (t) = sin (0,64t), c2 = 15, θ2 (t) = exp (-0,07t), KΞ = diag (σ,... ,σ),
σ = π/360, {tn}Nn=0, N = 70, tn - tn-1 = 1, n = 20, 11 ≤ r ≤ 61. Алгоритм оце-
нивания реализовывался на полномерном “скользящем окне” с 21 узлом, при
этом первая оценка измеряемого параметра и его производной относятся к
текущему моменту времени t20 = 20, а последняя к моменту t70 = 70. Имен-
но при t20 = 20 было сформировано первое полномерное “скользящее окно”,
а при t70 = 70 последнее. Поскольку все оценки привязываются к середине
“скользящего окна”, то первая полученная оценка соответствовала моменту
t10 = 10, а последняя
моменту t60 = 60. Следовательно, приводимые да-
лее характеристики точности относятся к усеченному отрезку времениGt =
= [10, 60].
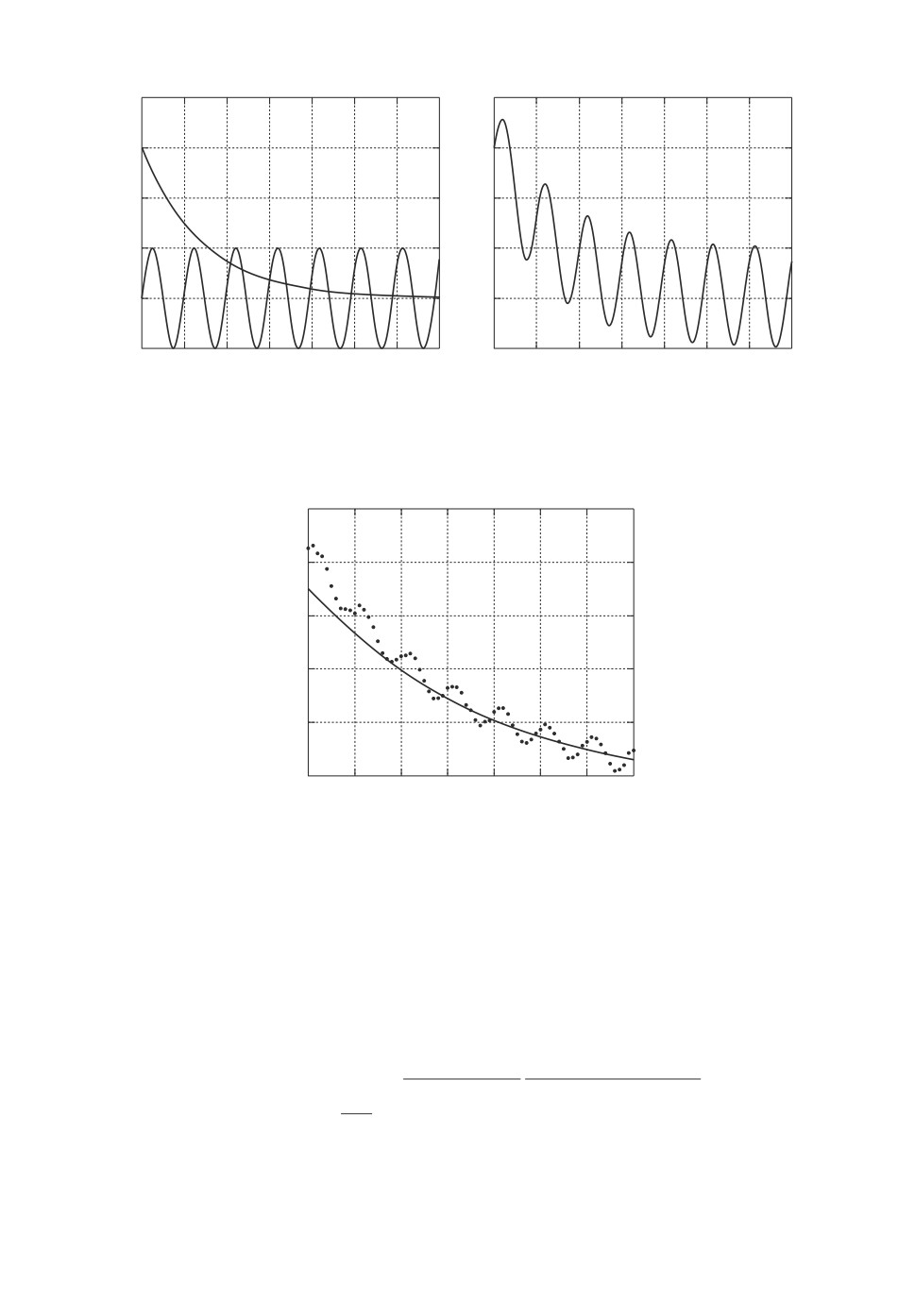
На рис. 5 приведены графики зависимости, характеризующие сингуляр-
ную помеху s (t). С использованием датчика случайных чисел и принятых
исходных данных было сформировано уравнение наблюдения, при этом на
рис. 6 представлены графики истинного значения измеряемой функции y = β
и наблюдения h = y + s + ξ. Начиная с момента времени tn = 20 для каж-
дого положения “скользящего окна” (всего 51 положение, т.е. 11 ≤ r ≤ 61)
147
q1, q2
s
a
б
20
20
15
15
10
10
5
5
0
0
-5
-5
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
t
t
Рис. 5. Зависимости, характеризующие сингулярную помеху: а семейство
базисных функций, б сингулярная помеха.
b, h
100
80
60
40
20
0
10
20
30
40
50
60
70
t
Рис. 6. Графики измеряемой функции и наблюдения: сплошная линия из-
меряемая функция; точечная линия наблюдение.
формировались текущие оценки β∗n и βn1)∗, соответствующие центральному
узлу. Для описания выходной координаты y (t) = β (t) в пределах “скользя-
щего окна” использовалась линейная комбинация из трех первых полиномов
Лежандра, т.е. в формуле (4.1) принималось: Mt = 3,
[(
)k-1]
dk-1
τ2 - 1
1
ψyk(t) = Pk-1 (τ) =
,
2k-1 (k - 1)!
dτk-1
k = 1,3, τ = τ (t), τ ∈ [-1,1].
Для перехода от параметра τ ∈ [-1, 1] к временной координате
[
]
t ∈ tj,r-nj/2-1, tj,r+nj/2-1
∈Gt
148
-
*
eb
1,0
0,8
0,6
0,4
0,2
0
10
20
30
40
50
60
t
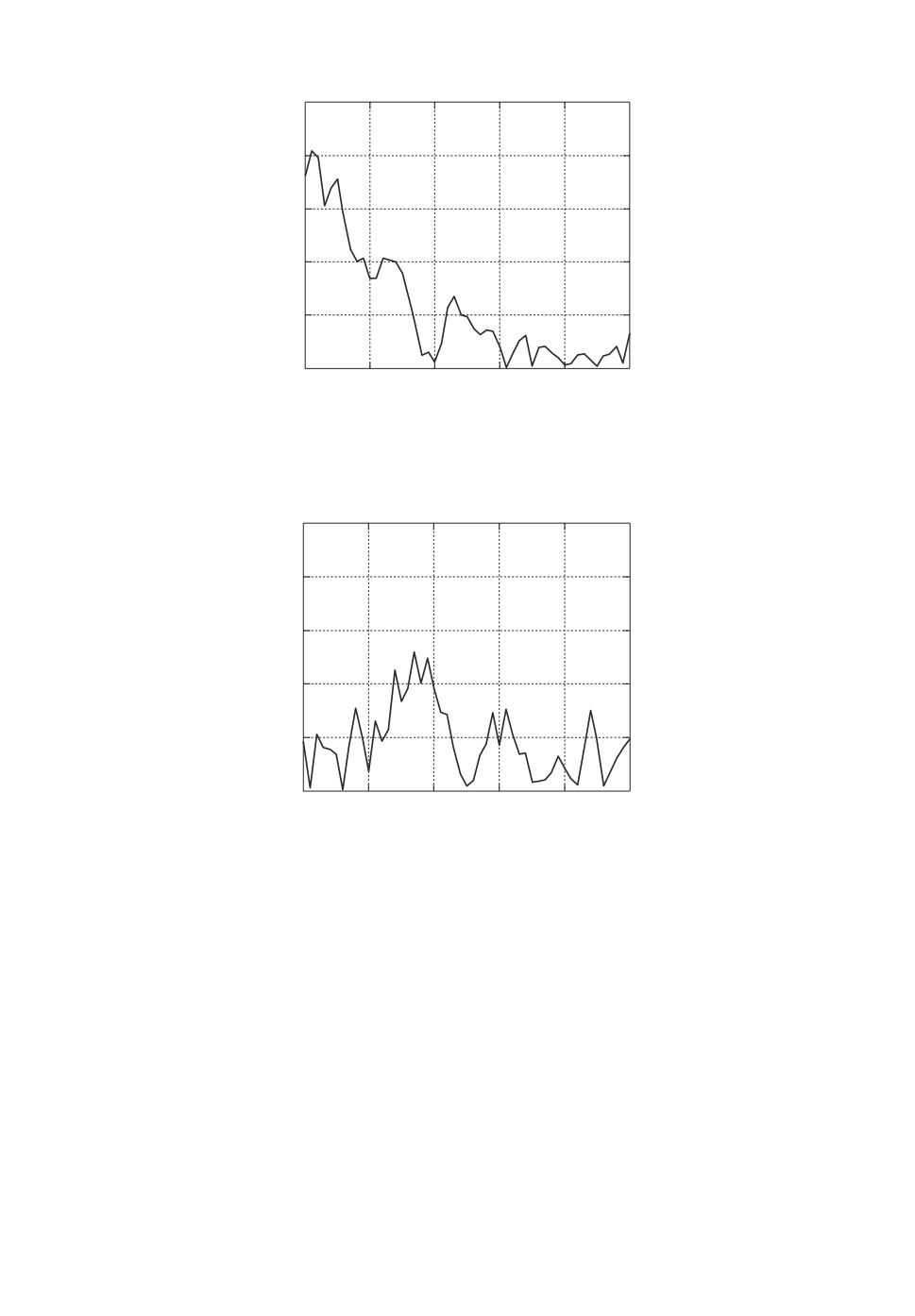
Рис. 7. Невязка оценивания выходной координаты.
-
(1)*
-2
eb , ´10
10
8
6
4
2
0
10
20
30
40
50
60
t
Рис. 8. Невязка оценивания производной выходной координаты.
применялось линейное преобразование:
[
(
)]
t=2-1
tj,r-nj/2-1 + tj,r+nj/2-1 - τ tj,r-nj/2-1 - tj,r+nj/2-1
Далее представлены графики зависимости частной невязки ε∗β оценивания
выходной координаты (рис. 7) и ее производной ε(1)∗β (рис. 8) в от времени при
фиксированном начальном условии x′0 = [1,7354; 112; 0,0800]T, при этом об-
щая невязка для выходной координаты составляет ε∗β = max
ε∗β = 0,8162 (со-
t
ответственно 1,5717 %), а для производной ε(1)∗β = max
ε(1)∗β = 0,0518 (соответ-
t
ственно 5,0601 %).
149
Проводился сравнительный анализ по оперативности (т.е. по времени фор-
мирования оценок, выраженном в секундах) разработанного автокомпенса-
ционного метода (АМ) и известного расширенного метода наименьших квад-
ратов (РМНК). Для одного фиксированного положения “скользящего окна”
фиксировалось частное время (TРМНК и TАМ) построения оценки производ-
ной β(1) в середине этого окна (один эксперимент). Проводилась тысяча та-
ких экспериментов с последующим усреднением п{ученных результатов,}ри
этом для частных результатов имеем TРМНК ∈
71 · 10-6, . . . , 123 · 10-6
и
{
}
TАМ ∈
31 · 10-6, . . . , 54 · 10-6
, а общий усредненный выигрыш по оператив-
ности состави
TРМНК
TАМ = 2,32 раза (здесь черта означает усреднение).
Также обнаружено, что при наличии в уравнении наблюдения одновре-
менно гармонической и экспоненциальной составляющих сингулярной помехи
РМНК приводит к некорректным оценкам производной для всех положений
“скользящего окна”, что объясняется известным эффектом “размазывания
точности” при расширении пространства состояний. Удовлетворительный по
точности результат оказался возможным только при наличии одной (гармо-
нической) составляющей, в этом случае частная невязка составила 0,0025 для
последнего положения “скользящего окна”.
Результаты моделирования подтверждают возможность эффективного ре-
шения задачи оценивания ЧХ на выходных траекториях ДО даже при некор-
ректных наблюдениях, содержащих сингулярную помеху.
8. Заключение
Развитый численно-аналитический метод исследования ДО ориентирован,
в первую очередь, на случаи, связанные с решением широкого круга при-
кладных задач, требующих вычислений в реальном времени. Данный метод
предполагает вынесение основного объема вычислений на первый (предва-
рительный) этап, не связанный непосредственно с наблюдением ДО. К кон-
цу этого этапа на базе семейства ОИК необходимо сформировать аналити-
ческое решение дифференциального уравнения и аналитическое выражение
для измеряемого выхода ДО, справедливые для заданной области изменения
временной координаты, начальных условий и других характерных парамет-
ров. К первому этапу также относятся операции, связанные с формировани-
ем вектор-столбца или матрицы весовых коэффициентов оптимального оце-
нивания, учитывающих спектральный состав измеряемых параметров, син-
гулярной помехи и статистические характеристики флуктуационного шума.
На втором (основном) этапе реализуются операции, связанные с оператив-
ным оцениванием значений ЧХ измеряемых функций по результатам некор-
ректных наблюдений, а также решением других целевых задач, требующих
использования полученных численно-аналитических описаний входных и вы-
ходных переменных ДО. Любые ЧХ поведения ДО находятся в виде скаляр-
ного произведения вектора наблюдений и соответствующего вектора весовых
коэффициентов.
Выражаю свою благодарность моим аспирантам Раду П.Ю. и Кондра-
шову А.Г. за помощь в проведении вычислительного эксперимента.
150
СПИСОК ЛИТЕРАТУРЫ
1.
Александров А.Г. Оптимальные и адаптивные системы. М.: Высш. шк., 1989.
2.
Пантелеев А.В., Бортаковский А.С. Теория управления в примерах и задачах.
М.: Высш. шк., 2003.
3.
Красовский А.А. Науковедение и состояние теории процессов управления. Об-
зор // АиТ. 2000. № 4. С. 3-19.
Krasovskii A.A. Theory of Science and Status of the Control Teory // Autom. Re-
mote Control. 2000. V. 61. No. 4. Part 1. P. 537-553.
4.
Жданюк Б.Ф. Основы статистической обработки траекторных измерений. М.:
Сов. радио, 1978.
5.
Булычев Ю.Г., Манин А.П. Математические аспекты определения движения
летательных аппаратов. М.: Машиностроение, 2000.
6.
Булычев Ю.Г., Васильев В.В., Джуган Р.В. и др. Информационно-измеритель-
ное обеспечение натурных испытаний сложных технических комплексов / Под
ред. А.П. Манина и В.В. Васильева. М.: Машиностроение - Полет, 2016.
7.
Булычев Ю.Г., Бурлай И.В., Манин А.А. Аналитическое конструирование си-
стем управления на основе метода опорных интегральных кривых // АиТ. 1994.
№ 7. С. 37-48.
Bulychev Yu.G., Burlai I.V., Manin A.A. Analytic Construction of Control Systems
by the Method of Supporting Integral // Autom. Remote Control. 1994. V. 55. No. 7.
Part 1. P. 954-963.
8.
Булычев Ю.Г., Манин А.А. Синтез адаптивных систем оптимального управ-
ления стохастическими объектами на основе прогнозирующей модели // АиТ.
1995. № 9. С. 81-92.
Bulychev Yu.G., Manin A.A. Synthesis of Adaptive Optimal Control Systems for
Stochastic Objects from a Forecast Model // Autom. Remote Control. 1995. V. 56.
No. 9. Part 2. P. 1268-1277.
9.
Брандин В.Н., Васильев А.А., Худяков С.Т. Основы экспериментальной косми-
ческой баллистики. М.: Машиностроение, 1974.
10.
Брандин В.Н., Разоренов Г.Н. Определение траекторий космических аппаратов.
М.: Машиностроение, 1978.
11.
Льюнг Л. О точности модели в идентификации систем // Изв. АН. Техн. кибер-
нетика. 1992. № 6. С. 55-64.
12.
Воробьев Л.М. К теории полета ракет. М.: Машиностроение, 1970.
13.
Булычев Ю.Г., Мельников А.В. Численно-аналитический метод исследования
поведения динамической системы по результатам некорректных наблюдений без
расширения пространства состояний // Журн. вычисл. матем. и мат. физ. 2019.
Т. 59. № 6. С. 937-950.
14.
Леонов В.А., Поплавский Б.К. Фильтрация ошибок измерений при оценивании
линейного преобразования полезного сигнала // Изв. АН. Техн. кибернетика.
1992. № 1. С. 163-170.
15.
Булычев Ю.Г., Елисеев А.В. Вычислительная схема инвариантно-несмещенного
оценивания значений линейных операторов заданного класса // Журн. вычисл.
матем. и мат. физ. 2008. Т. 48. № 4. С. 580-592.
16.
Булычев Ю.Г., Елисеев А.В., Бородин Л.И. и др. Обобщенное инвариантно-
несмещенное маскирование и оценивание информационных процессов в усло-
виях мультиструктурных помех // АиТ. 2010. № 4. С. 140-149.
151
Bulychev Yu.G., Eliseev A.V., Borodin L.I., et al. Generalized Invariant-Unbiased
Masking and Estimation of Informational Processes with Multistructural Noise //
Autom. Remote Control. 2010. V. 71. No. 4. P. 672-680.
17. Булычев Ю.Г. Метод опорных интегральных кривых решения задачи Коши для
обыкновенных дифференциальных уравнений // Журн. вычисл. матем. и мат.
физ. 1988. Т. 28. № 10. С. 1482-1490.
18. Булычев Ю.Г. Методы численно-аналитического интегрирования дифференци-
альных уравнений // Журн. вычисл. матем. и мат. физ. 1991. Т. 31. № 9.
С. 1305-1319.
19. Бибиков Ю.Н. Общий курс обыкновенных дифференциальных уравнений. Л.:
Изд-во Ленингр. ун-та, 1981.
20. Треногин В.А. Функциональный анализ. М.: Наука, 1980.
21. Тихонов А.Н., Васильева А.Б., Свешников А.Г. Дифференциальные уравнения.
М.: Наука, 1985.
22. Канторович Л.В., Акилов Г.П. Функциональный анализ. М.: Наука, 1977.
23. Бабенко К.И. Основы численного анализа. М.: Наука, 1986.
24. Иванов В.В. Методы вычислений на ЭВМ. Киев.: Наук. думка, 1986.
25. Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. М.: БИНОМ.
Лаборатория знаний, 2008.
26. Mex-Files // GNU Octave [Электронный ресурс]
27. Techniques to Improve Performance // MATLAB Documentation [Электронный
for-improving-performance.html.
Статья представлена к публикации членом редколлегии М.М. Хрусталевым.
Поступила в редакцию 18.09.2019
После доработки 14.11.2019
Принята к публикации 28.11.2019
152