Автоматика и телемеханика, № 6, 2020
© 2020 г. В.О. НИКИФОРОВ, д-р техн. наук (nikiforov_vo@itmo.ru),
А.В. ПАРАМОНОВ, канд. тех. наук (avp.atrax@gmail.com),
Д.Н. ГЕРАСИМОВ, канд. тех. наук (gerasimovdn@mail.ru)
(Университет ИТМО, Санкт-Петербург)
АЛГОРИТМЫ АДАПТИВНОГО РЕГУЛИРОВАНИЯ
В МНОГОКАНАЛЬНЫХ ЛИНЕЙНЫХ СИСТЕМАХ
С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ1
В статье представлены два алгоритма адаптивного управления по
состоянию для класса линейных многоканальных объектов в условиях
внешних возмущений и наличия запаздывания в канале управления. За-
дающее воздействие и внешнее возмущение рассматриваются в качестве
мультигармонических сигналов с неизвестными частотами, амплитуда-
ми и начальными фазами. Алгоритмы синтезированы с использованием
метода прямого адаптивного управления, основанного на принципе внут-
ренней модели, и не требуют проведения процедуры идентификации па-
раметров возмущения и/или сигнала задания.
Ключевые слова: адаптивное слежение, многоканальная система, компен-
сация возмущений, запаздывание по управлению, внутренняя модель.
DOI: 10.31857/S0005231020060098
1. Введение
В статье для класса линейных многоканальных систем с запаздыванием
по управлению решается задача адаптивного слежения за сигналом задания
в условиях внешних возмущений.
Обеспечение слежения за задающим сигналом в условиях внешних воз-
мущений относится к фундаментальным проблемам теории автоматическо-
го управления и является предметом активных исследований на протяжении
нескольких десятилетий. Среди предложенных решений широкое применение
получил метод внутренней модели, в соответствии с которым задающее воз-
действие и/или внешнее возмущение моделируется в качестве выхода линей-
ной автономной динамической модели (виртуального генератора), возбуж-
даемой ненулевыми начальными условиями. В этом случае для полной ком-
пенсации возмущающего воздействия и/или достижения нулевой установив-
шейся ошибки слежения за сигналом задания модель виртуального генерато-
ра должна быть соответствующим образом воспроизведена в законе управ-
ления [1-3]. При реализации такого подхода иногда говорят о сервоуправле-
нии или о регулировании, понимая под этим обеспечение асимптотического
слежения за задающим сигналом с одновременной компенсацией внешнего
возмущения.
1 Работа выполнена при государственной финансовой поддержке ведущих университе-
тов Российской Федерации (субсидия 08-08).
153
Ранние работы в этой области были посвящены классической реализации
метода внутренней модели, основанной на предположении, что параметры
виртуального генератора известны, что означает точное знание формы внеш-
него сигнала [1-5]. Случай, когда априорно известен только некоторый класс
внешних воздействий, но не их точные параметры, является более реалистич-
ным с практической точки зрения. В этом случае используется адаптивная
реализация метода внутренней модели [6-11], когда параметры виртуального
генератора предполагаются неизвестными, и для построения закона управле-
ния используется специальный алгоритм адаптации, формирующий настраи-
ваемые параметры регулятора. Позже адаптивная реализация метода внут-
ренней модели была расширена на нелинейные объекты [12-15], а также на
классы систем с параметрически неопределенными объектами [16, 17] и мно-
гоканальной средой [18, 19].
В последнее десятилетие предметом интенсивных исследований стали за-
дачи адаптивного регулирования в системах с запаздыванием в канале управ-
ления. Данное запаздывание может быть обусловлено работой вычислитель-
ного блока, исполнительных механизмов, а также структурными особенно-
стями объекта управления. Для такого класса задач большое развитие полу-
чил идентификационный подход [20-26], в соответствии с которым в алгорит-
ме управления используется специальный блок идентификации параметров
внешних сигналов и расчетный блок, генерирующий параметры алгоритма
управления.
Одним из недостатков идентификационного подхода является тот факт,
что, как правило, его реализация требует знания точного числа гармоник,
некоторых априорных оценок возможных значений их частот, а иногда и ми-
нимальной разности частот между соседними гармониками. Другой недоста-
ток заключается в требовании выполнения условия неисчезающего возбуж-
дения [27], при нарушении которого идентификационный подход оказывается
неэффективным.
Альтернативным идентификационному походу является метод прямого
адаптивного управления [10, 28], который позволяет исключить этап иден-
тификации параметров сигнала задания и/или возмущения и осуществить
непосредственную настройку алгоритма управления для обеспечения задан-
ной цели управления. При этом для синтеза закона управления из априор-
ной информации о виртуальном генераторе используется только его порядок.
Иными словами априорно известна только верхняя оценка количества гармо-
ник во внешнем сигнале.
Однако обеспечение устойчивости систем прямого адаптивного управле-
ния с запаздыванием является сложной и не до конца решенной задачей и,
как правило, предусматривает определение критических значений коэффици-
ента адаптации и/или запаздывания, при которых сохраняется устойчивость
системы [29, 30].
Сохранение работоспособности замкнутой системы при произвольных зна-
чениях коэффициента адаптации и запаздывания по управлению может быть
обеспечено путем специальной модификации сигнала ошибки, что успешно
применялось при решении задачи компенсации возмущений для одноканаль-
154
ных [31] и многоканальных систем [32], а так же в задачах по обеспечению
слежения за эталонным сигналом [33, 34]. В статьях [31, 33] представлены
решения по управлению одноканальными неустойчивыми объектами, а в ра-
ботах [32, 34] рассматривался случай многоканального асимптотически устой-
чивого объекта, что не требовало отдельного решения задачи его стабилиза-
ции.
Настоящая статья развивает подход, изначально предложенный в [31-34],
на случай одновременного решения задач асимптотического слежения за сиг-
налом задания и компенсации внешнего возмущения для неустойчивого мно-
гоканального объекта управления. В статье предлагаются два различных ал-
горитма адаптивного регулирования, один из которых основан на построении
единого регрессора и, как следствие, общего алгоритма адаптации для зада-
чи слежения и задачи компенсации. Второй алгоритм основан на раздельном
решении задач слежения и компенсации. Оба подхода имеют свои преимуще-
ства и недостатки, которые будут обсуждены в заключении.
Статья организована следующим образом. Во втором разделе формули-
руется постановка задача. В третьем разделе приводится параметризация
возмущения и сигнала задания. Четвертый и пятый раздел посвящены про-
цедуре синтеза алгоритмов управления с объединенным и раздельным алго-
ритмами адаптации. В конце разделов приведены результаты компьютерного
моделирования.
В статье использованы следующие обозначения: s = d/dt оператор диф-
ференцирования по времени, In×n единичная матрица размерности n × n,
blockdiag(A1, . . . , An)
блочно-диагональная матрица с соответствующими
элементами, P = P⊤ ≻ 0 симметричная положительно определенная мат-
рица, ∥x∥ евклидова норма вектора x.
2. Постановка задачи
Рассматривается линейный стационарный многоканальный объект вида
{ ˙x = Ax + B(u(t - τ) + δ),
(1)
y = Cx,
где x ∈ Rn
вектор состояния объекта, u ∈ Rq
вектор управляющих
воздействий, y ∈ Rq
вектор регулируемых переменных, n ≥ q, A ∈ Rn×n,
B ∈ Rn×q, C ∈ Rq×n известные матрицы, τ
известное запаздывание,
δ ∈ Rq вектор неизмеряемых внешних возмущений.
Целью управления является синтез закона управления, обеспечивающего
ограниченность всех сигналов в замкнутой системе и выполнение целевого
условия:
(2)
lim
∥g(t) - y(t)∥ = 0,
t→∞
где g ∈ Rq вектор задающих (эталонных) сигналов2. Поставленная задача
решается при выполнении следующих допущений.
2 В статье все сигналы (управления, задания, возмущения и т.п.) являются векторными.
Поэтому термин “векторный” в дальнейшем будет опускаться.
155
Допущение 1. Тройка матриц (A,B,C) полностью управляемая и на-
блюдаемая, а передаточная матрица W (s) = C(sI - A)-1B невырожденна,
т.е. det W (s) = 0.
Допущение 2. Возмущающее воздействие δ и эталонный сигнал g опи-
сываются моделями:
{
z
˙
1 = Γ1z1,
(3)
δ=H1z1,
{
z
˙
2 = Γ2z2,
(4)
g=H2z2,
где z1 ∈ Rm1 , z2 ∈ Rm2
векторы состояния с неизвестными начальными
условиями, Γ1 ∈ Rm1×m1 , Γ2 ∈ Rm2×m2
матрицы постоянных коэффици-
ентов, все собственные значения которых являются простыми и лежат на
мнимой оси, H1 ∈ Rq×m1 , H2 ∈ Rq×m2 постоянные матрицы. Без потери
общности будем считать, что пары (Γ1, H1) и (Γ2, H2) полностью наблюдае-
мы.
Допущение 3. Параметры матриц Γ1, H1, Γ2, H2 неизвестны, в то время
как размерности m1 и m2 известны. Сигнал g доступен прямым измерениям.
Допущение 4. Нули передаточной матрицы W(s) не совпадают с соб-
ственными числами матрицы Γ2.
Замечание 1. Модели виртуальных генераторов (3) и (4) описывают це-
лые классы внешних воздействий. Так генератор второго порядка в зависи-
мости от конкретных значений параметров и начальных условий может ге-
нерировать как гармонические сигналы различных частот и амплитуд, так
и постоянные сигналы различных амплитуд (хотя для постоянных сигналов
достаточно генератора первого порядка). Поэтому порядки виртуальных ге-
нераторов mi (i = 1, 2) могут рассматриваться как верхние оценки динамиче-
ских порядков действительных моделей внешних сигналов. Точного совпаде-
ния порядков виртуальных и действительных генераторов внешних сигналов,
а также возбуждения начальными условиями всех мод виртуального генера-
тора не требуется.
Рассматриваемая задача будет решена в несколько шагов. Сначала с ис-
пользованием специальных наблюдателей будут построены параметризован-
ные модели возмущения, сигнала задания и их будущих значений. Затем с
использованием модифицированной схемы расширения будут сформированы
алгоритмы адаптивной настройки коэффициентов регулятора, позволяющие
избежать физически нереализуемой процедуры настройки прошлых значений
настраиваемых коэффициентов. На последнем шаге будет построена стаби-
лизирующая обратная связь, использующая оценку будущего значения век-
тора состояния, и будет доказано достижение цели управления в замкнутой
системе.
Ниже будут предложены два решения рассматриваемой задачи. Одно из
них основано на построении общей регрессионной модели для двух внешних
сигналов задания и возмущения, и на синтезе общего алгоритма адаптации.
156
Второе решение основывается на раздельном решении задач слежения и ком-
пенсации и на раздельной адаптивной настройке соответствующих компонент
алгоритма управления. Общими для двух подходов будут параметризованные
модели внешних сигналов.
3. Параметризация возмущения и сигнала задания
Для того, чтобы можно было применить универсальные методы адаптив-
ной настройки закона управления, представим сигналы задания и возмуще-
ние в параметризованном виде а именно, в виде линейных регрессион-
ных моделей с неизвестными постоянными параметрами. Как было показано
в [35, 36], сигналы δ и g можно представить виде:
(5)
δ=Θ1ξ1 +ς1,
(6)
g=Θ2ξ2 +ς2,
где Θ1 ∈ Rq×m1 и Θ2 ∈ Rq×m2 матрицы неизвестных постоянных парамет-
ров, сигналы ς1 и ς2 порождены ненулевыми начальными условиями и экспо-
ненциально затухают3, а регрессоры ξ1 ∈ Rm1 и ξ2 ∈ Rm2 являются векторами
состояний фильтров
˙
(7)
ξ
1 = G1ξ1 + L1
δ,
˙
(8)
ξ
2 = G2ξ2 + L2g
с произвольными гурвицевыми матрицами G1 ∈ Rm1×m1 и G2 ∈ Rm2×m2 ,
образующими с соответствующими матрицами постоянных коэффициентов
L1 ∈ Rm1×q и L2 ∈ Rm2×q полностью управляемые пары.
Использование фильтров (7) и (8) приводит к двум важным результатам.
Во-первых, полученные с помощью них регрессионные модели (5) и (6) хо-
рошо известны в современной теории адаптивного управления [27, 37] и в
теории идентификации [38] и позволяют использовать широкий класс универ-
сальных алгоритмов адаптации и идентификации. В настоящей работе будут
применены методы прямого (безыдентификационного) адаптивного управле-
ния.
Во-вторых, подставляя (5) в (7) и (6) в (8) получаем канонические формы
генераторов внешних сигналов
˙
(9)
ξ
i = (Gi + LiΘ1)ξi,
i = 1,2,
которые с использованием фундаментального решения позволяют получить
аналитические выражения будущих значений регрессоров
(10)
ξi(t + τ) = exp((Gi + LiΘi)τ)ξi
(t), i = 1, 2,
3 Сигналы ς1 и ς2 не влияют на устойчивость замкнутой системы, и поэтому в дальней-
шем рассмотрении будут исключены.
157
а также сигнала возмущения
(11)
δ(t + τ) = Θ1ξ1(t + τ) = Ψ∗1ξ1,
где exp((Gi + LiΘi)τ) матричная экспонента (i = 1, 2), Ψ∗1 = Θ1 exp((G1+
+L1Θ1)τ) матрица неизвестных параметров размерности q × m1 .
Следует отметить, что фильтр (7) физически нереализуем, так как исполь-
зует неизмеряемое возмущение. Поэтому вместо него используем физически
реализуемый наблюдатель регрессора ξ1, структура которого определяется
следующей леммой [36].
Лемма 1. Пусть выполняются допущения 1, 2, 3. Введем в рассмотре-
ние наблюдатель, формирующий оценк
ξ1 неизмеряемого регрессора ξ1:
{
ξ1 = η + Nx,
(12)
η = G1η + (G1N - NA)x - NBu(t - τ),
где η ∈ Rm1 вспомогательный вектор, N ∈ Rm1×n произвольная мат-
рица, удовлетворяющая равенству NB = L1. Тогда оценк
ξ1 ограничена и
сходится к ξ1 экспоненциально.
Лемма 1 доказывается путем дифференцирования вектора ошибки на-
блюдени
ξ1 = ξ1
ξ1 с учетом (1), (7) и (12), что приводит к уравнению
˜
ξ1 = G1
ξ1.
С помощью замены ξ1 на оценк
ξ1 в (11) окончательно получаем (без
учета экспоненциально затухающего слагаемого):
(13)
δ(t + τ) = Ψ∗1
ξ1.
Выражения (10) и (13) будут использованы при синтезе закона адаптив-
ного регулирования с целью компенсации запаздывания τ.
4. Алгоритм управления с общим регрессором
4.1. Построение модели ошибки и выбор структуры закона управления
Для формирования модели ошибки слежения введем в рассмотрение мат-
рицу преобразования координат M ∈ Rn×m2 , удовлетворяющую условию
(14)
CM =Θ2.
Тогда модели ошибки по состоянию и по выходу могут быть заданы в виде
(15)
e=Mξ2
− x,
(16)
ε=g-y
соответственно. В силу (14) ошибку по выходу можно представить как
ε = Ce.
158
Вычислим производную ошибки (15) с учетом (1), (9) и (13):
(
)
(17)
ė=M(G2 +L2Θ2)ξ2 - Ax+B(u(t-τ)+Ψ
ξ1(t - τ))
Добавляя и вычитая из правой части последнего уравнения AMξ2, после
элементарных преобразований получим:
(18)
ė = Ae + (M(G2 + L2Θ2) - AM)ξ2 - B(u(t - τ) + Ψ∗1ξ1
(t - τ)).
Как известно [3, 11], выполнение допущений 1 и 2 гарантирует существо-
вание по крайней мере одного набора матриц M и Θ∗2, который одновременно
удовлетворяет выражению (14) и следующему равенству:
(19)
M (G2 + L2Θ2) - AM = BΘ∗2.
Равенство (19) с учетом (10) позволяет получить модель ошибки в виде
(
)
(20)
ė = Ae + B
-Ψ∗1
ξ1(t - τ) + Ψ∗2ξ2(t - τ) - u(t - τ) ,
где Ψ∗2 = Θ∗2 exp((G2 + L2Θ2)τ) неизвестная матрица постоянных парамет-
ров. Вводя обозначения для общей матрицы неизвестных параметров
Ψ = [Ψ∗1,Ψ∗2]
и для общего регрессора
[
]
ξ⊤(t) =
ξ⊤1(t),ξ⊤2(t) ,
окончательно получаем:
{ ė = Ae + B(Ψξ(t - τ) - u(t - τ)),
(21)
ε = Ce.
Анализ последнего выражения мотивирует следующий выбор структуры
алгоритма управления:
(22)
u=us +Ψ
ξ,
где
Ψ является матрицей настраиваемых параметров, а us
стабилизи-
рующая компонента закона управления. Ниже будет синтезирован алгоритм
адаптивной настройки матрицыΨ, а также выбрано правило формирова-
ния us. Особенностью предлагаемого подхода является возможность незави-
симого синтеза алгоритма адаптивной настройки и стабилизирующей обрат-
ной связи.
159
4.2. Синтез алгоритма адаптации
Подставляя (22) в (21), получаем
{
ė = Ae + B(Ψ(t - τ)ξ(t - τ) - us(t - τ)),
(23)
ε = Ce,
гдеΨ = Ψ -Ψ матрица параметрических ошибок.
Сигнал e является недоступным прямым измерениям (матрица M являет-
ся неизвестной), матрица A в общем случае может быть неустойчивой, а сама
модель ошибки (23) содержит прошлые значения настраиваемых параметров
Ψ(t - τ). Для преодоления указанных проблем предлагается использовать
метод расширенной ошибки4, который изначально был предложен для син-
теза систем адаптивного управления по выходу [39] (см. также обзор [40]),
а позже была продемонстрирована его эффективность при построении алго-
ритмов адаптации в системах с запаздыванием [31, 33].
Лемма 2. Введем в рассмотрение динамический фильтр вида
{˙ˆe=Aˆe+L
s(ε + Cê) + B(Ψ(t - τ)ξ(t - τ) + us(t - τ)),
(24)
ε=ε+Cê-Ξ(t-τ
ψ(t),
где матрица Ls ∈ Rn×q выбрана таким образом, что матрица As = A + LsC
гурвицева,
ψ = col(Ψ⊤1 ,..., Ψ⊤q ) ∈ Rq(m1+m2)
вектор настраиваемых пара-
метров,Ψ⊤i
строки матрицыΨ, Ξ(t - τ) ∈ Rq×q(m1+m2) матричный
регрессор вида
Ws11(s)[ξ(t - τ)] ... Ws1q(s)[ξ(t - τ)]
Ξ(t - τ) =
,
Wsq1(s)[ξ(t - τ)] ... Wsqq(s)[ξ(t - τ)]
Ws(s) = C(sI - As)-1B асимптотически устойчивая передаточная функ-
ция. Тогда для сигнала расширенной ошибки ε справедливо следующее равен-
ство:
(25)
ε= Ξ(t - τ)ψ(t),
гд
ψ=ψ
ψ вектор параметрических ошибок.
Доказательство. Введем вспомогательные переменные ê∗ = e + ê и
ε∗ = ε + Cê. Тогда, вычисляя производную ê∗, с учетом (23) и (24) можно
показать, что
{ ˙ˆe∗ = A
sê∗ + BΨξ(t - τ),
ε∗ = Ce∗
4 В англоязычной литературе данный подход получил название augmented error [39].
Здесь будем следовать терминологии статьи [40], понимая, что процедура “расширения”
состоит не в увеличении размерности векторного сигнала, а в добавлении к нему некоторой
корректирующей составляющей.
160
или ε∗ = Ws(s)[Ψξ(t - τ)]. Нетрудно убедиться, что с учетом свойств линей-
ных систем
Ws11(s) ... Ws1q(s)
Ψ⊤1ξ(t - τ)
Ws(s)[Ψξ(t - τ)] =
=
Wsq1(s) ... Wsqq(s) Ψ⊤qξ(t - τ)
[
]
[
]
Ws11(s)
ξ⊤(t - τ)Ψ1
+ ...
+Ws1q(s)
ξ⊤(t - τ)Ψq
=
=
[
]
[
]
Wsq1(s)
ξ⊤(t - τ)Ψ1
+ ...
+Wsqq(s)
ξ⊤(t - τ)Ψq
Ψ1
= Ξ(t - τ)
= Ξ(t - τ)ψ.
Ψq
По существу, последние выражения представляют собой следствие леммы о
перестановке5 [41] для матричного случая, утверждающей справедливость
равенства
(26)
Ws
(s)[Ψξ(t - τ)] = Ξ(t - τ)ψ,
которое будет использовано при доказательстве леммы 3. Подставляя (26) во
второе выражение (24), непосредственно получаем (25). Лемма доказана.
Замечание 2. В частном случае скалярного объекта, т.е. когда
y,u,δ ∈ R1, а Ψ является вектором-строкой размерности 1 × (m1 + m2), вто-
рое уравнение системы (24) и модель (25) принимают вид
ε=ε+Cê
ξ⊤(t - τ
ψ(t),
ε
ξ⊤(t - τ
ψ(t)
соответственно, гд
ξ = Ws(s)[ξ] отфильтрованный регрессор.
Модель (25) позволяет использовать широкий класс универсальных алго-
ритмов адаптации, например градиентного вида:
ˆ
⊤
(27)
ψ=ΓΞ
(t - τ)ε,
где Γ ∈ Rq(m1+m2)×q(m1+m2)
положительно определенная матрица. Особо
отметим, что в силу ограниченности регрессора Ξ нормирование алгоритма
адаптации (27), использующего не истинную ε, а расширенную ε ошибку сле-
жения, не требуется.
Тогда вне зависимости от свойств устойчивости замкнутой системы алго-
ритм адаптации (27) будет обладать следующими свойствами.
5 В англоязычной литературе данная лемма носит название “The swapping lemma” [27].
161
Лемма 3. Пусть выполняются допущения 1-4. Тогда алгоритм адапта-
ции (27) совместно с наблюдателем возмущения (12), наблюдателем задаю-
щего воздействия (8), законом управления (22) и схемой расширения (24)
применительно к объекту управления (1) будет обеспечивать:
1) ограниченность ∥ε∥,
ψ∥, ∥Ψ∥;
2) асимптотическое стремление ∥Ψ(t)ξ(t)∥ → 0, а также
∥Ψ(t - τ)ξ(t - τ)∥ → 0
при t → ∞.
Доказательство. Для анализа устойчивости системы, замкнутой ал-
горитмом адаптации (27), выберем функцию Ляпунова
1
(28)
V =
ψ⊤Γ-1ψ
,
2
V
производная которой с учетом (27) имеет вид
= -ε⊤ε≤ 0. Из последнего
неравенства непосредственно следует свойство 1 леммы 3, а также стремление
∥ε∥ → 0 и ∥Ξ(t - τ
ψ(t)∥ → 0 при t → ∞ [27]. Так как регрессор ξ ограничен
ˆ
(см. лемму 1 и (8)), то из (27) следует ∥ψ∥→0 при t→∞. Из последнего
стремления непосредственно получаем ∥˙Ψ∥ → 0; тогда с учетом леммы о пе-
рестановке (см. также (26)) имеем, что Ξ(t - τ
ψ(t) → Ws(s)[Ψ(t - τ)ξ(t)] при
t→∞ и, как следствие, ∥Ψ(t - τ)ξ(t)∥→0 (а также ∥Ψ(t - τ)ξ(t - τ)∥→0 и
∥Ψ(t)ξ(t)∥ → 0). Лемма доказана.
4.3. Построение стабилизирующей компоненты
Используем теперь модель ошибки слежения (23) для синтеза стабили-
зирующей компоненты алгоритма управления us. Учитывая, что ошибка e
недоступна прямым измерениям, построим наблюдатель, структура и свой-
ства которого определяются следующей леммой.
Лемма 4. Рассмотрим совместно с алгоритмом адаптации (27) наблю-
датель ошибки по состоянию вида
(29)
ė=Ae+Le(ε - Ce) - Bus
(t - τ),
где e оценка вектора e, а матрица Le ∈ Rn×,q выбрана таким образом, что
матрица Ae = A - LeC гурвицева. Тогда для ошибки наблюдения e = e - e
справедливо равенство
(30)
lim
∥e(t)∥ = 0.
t→∞
Доказательство. Дифференцируя e c учетом (23) и (29), получаем
(31)
e=Aee+BΨ
(t - τ)ξ(t - τ),
откуда с учетом свойства (2) Леммы 3 немедленно получаем справедли-
вость (30).
162
Сформируем стабилизирующую компоненту сигнала управления в виде6
[42]
t
∫
(32)
us = -Kexp(Aτ)e(t) - exp(A(t - µ))Bus(µ)dµ ,
t-τ
где матрица K ∈ Rq×n выбрана таким образом, что матрица As = A + BK
гурвицева, e вектор состояния наблюдателя (29).
Тогда свойства замкнутой системы будут определяться следующим утвер-
ждением.
Утверждение 1. Пусть выполняются допущения 1-4. Тогда алгоритм
управления (22) с наблюдателем возмущения (12) и наблюдателем задающе-
го воздействия (8), схемой расширения (24), алгоритмом адаптации (27),
наблюдателем ошибки слежения (29) и стабилизирующей компонентой (32)
обеспечивает для объекта управления (1) ограниченность всех сигналов и
выполнение целевого условия (2).
Доказательство. Вычисляя на основе (29) будущее значение векто-
ра e, получаем:
∫t
e(t + τ) = exp(Aτ)e(t) + exp(A(t - µ)) (LeCe(τ + µ) - Bus(µ)) dµ.
t-τ
Тогда управление (32) можно представить в виде
(33)
us = -K (e(t + τ) - e(t + τ) - Δe
(t + τ)) ,
где
∫t
Δe(t + τ) = exp(A(t - µ))LeCe(τ + µ)dµ.
t-τ
Подставляя (33) в (23), получаем:
ė = Ase + B(Ψ(t - τ)ξ(t - τ) - Ke- KΔe(t - τ)).
Так как в силу леммы 3 имеем ∥Ψ(t - τ
ξ(t - τ)∥ → 0, в силу леммы 4 ∥e∥ → 0
и, следовательно, ∥Δe∥ → 0, то из последнего выражения непосредственно
получаем ограниченность e, стремление ∥e∥ → 0, выполнение целевого усло-
вия (2) и ограниченность us. С учетом ограниченности e и ξ2 получаем огра-
ниченность x, из (12)
ограниченность η, а с учетом ограниченности us
из (24) ограниченность ê, а из (29) ограниченность e. Утверждение до-
казано.
6 Следует отметить, что сформированное стабилизирующее управление не является
внутренне устойчивым из-за возможности наличия неустойчивой матрицы A [43]. Поэтому
на практике используются специальные методы устойчивой реализации таких алгорит-
мов [44, 45].
163
4.4. Числовое моделирование
В качестве примера рассмотрим объект (1), где
[
]
]
]
0
1
[0
2
[1
0
A=
,
B=
,
C =
,
τ =3c
0,1
-1,5
1
0
0
3
и δ = col(2cos(6t),3sin(0,8t)), g = col(cos(5t),4sin(7t)). Наблюдатели задаю-
щего воздействия (8) и возмущения (12) построены со следующими парамет-
рами:
0
1
0
0
0
0
1
0
0
0
1
0
0
0
0
1
G1 = G2 =
,
N =
,
L2 =
0
0
0
1
0
1
1
0
−36 -60 -37 -10
1
0
0
1
Соответствующие матрицы в выражениях (24), (29) и (32) выбраны как
[
]
[
]
0
0
0
0
[-1 -0,5]
Le =
,
Ls =
,
K =
-1,1
0,2
1,1
1/6
0
0
Параметры алгоритма адаптации (27) были определены матрицей
{
}
Γ = blockdiag
150I4×4, 300I4×4, 150I4×4, 300I4×4
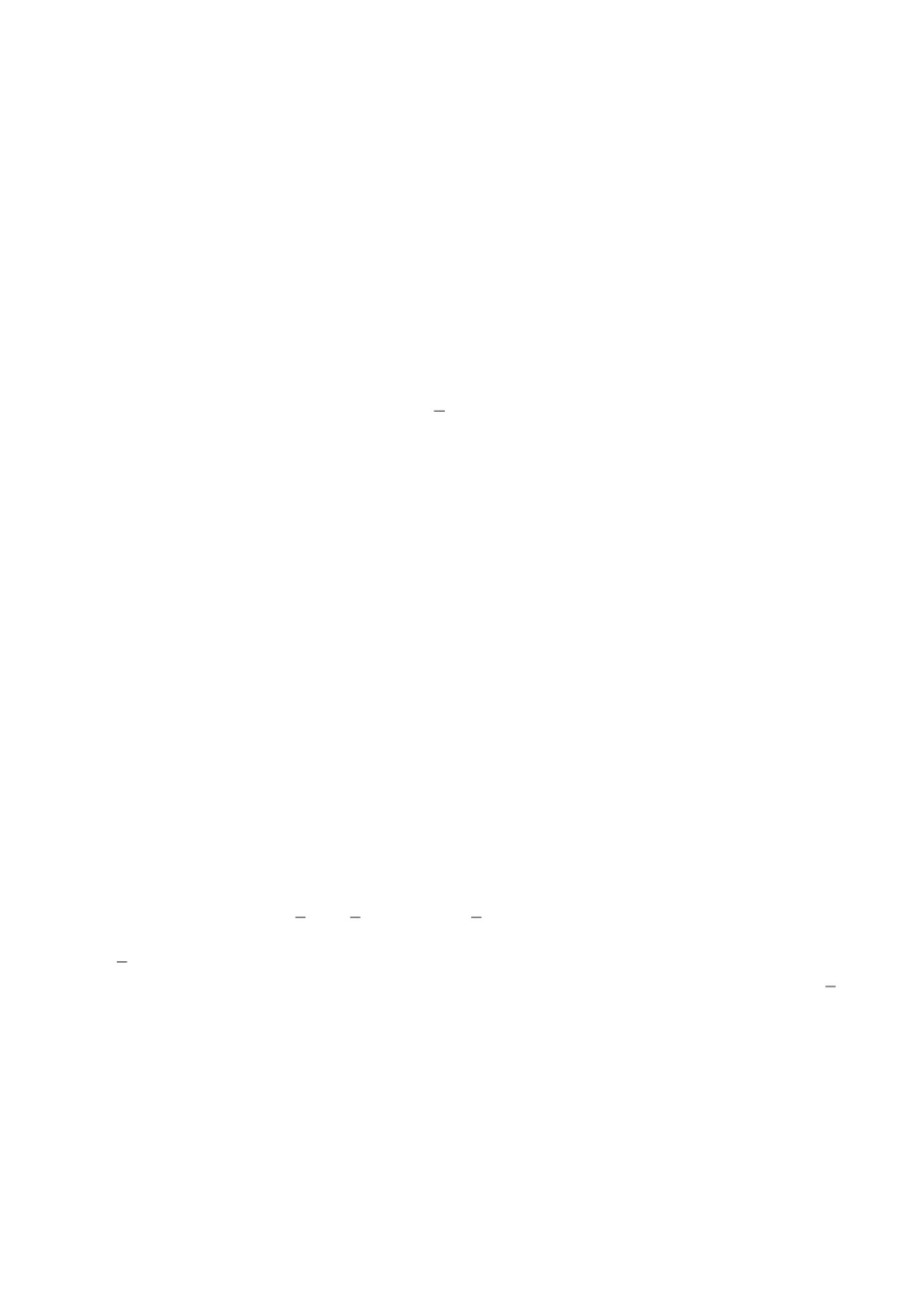
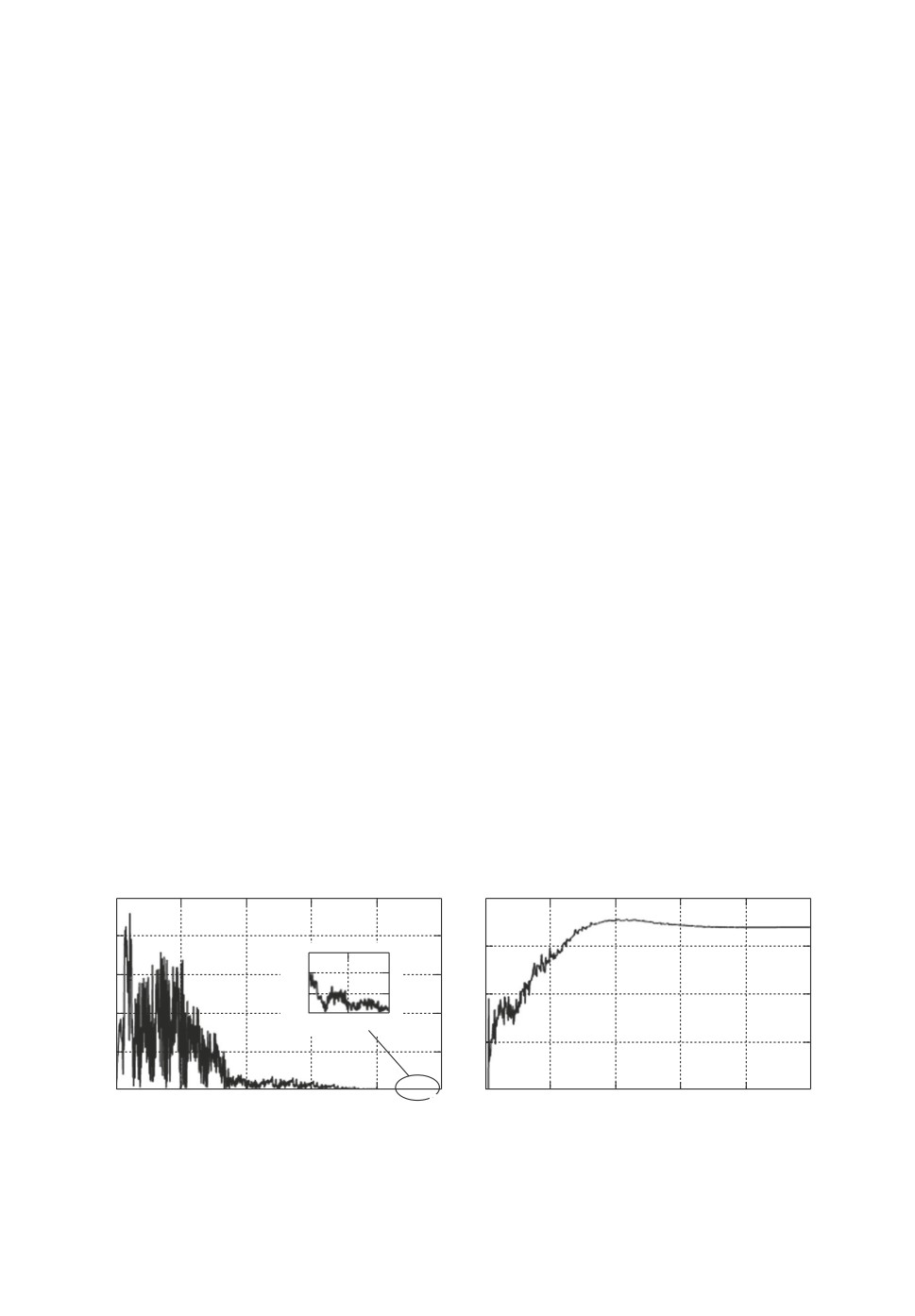
Графики переходных процессов в линейной многоканальной системе, за-
мкнутой адаптивным регулятором с общим регрессором, представлены на
рис. 1. Результаты числового моделирования демонстрируют полную компен-
сацию внешних возмущений и асимптотическую сходимость ошибки слеже-
ния к нулю.
||e||
||^||
a
б
50
80
40
60
0,3
30
0,2
0,1
40
20
0
210
230
250
20
10
0
50
100
150
200
250
0
50
100
150
200
250
t
t
Рис. 1. Графики переходных процессов в системе, замкнутой алгоритмом
управления с общим регрессором.
164
5. Алгоритм управления с раздельным решением
задач слежения и компенсации
Будем использовать регрессор
ξ1 и ξ2, полученные с помощью наблюда-
телей (12) и (8) соответственно, а управление будем формировать в виде
(34)
u=uc +ut +us,
где uc компонента компенсации возмущения, ut следящая компонента,
us стабилизирующая компонента. Ниже представлена процедура последо-
вательного независимого синтеза всех трех компонент.
5.1. Построение следящей компоненты
Обозначим через x∗(t) желаемую траекторию изменения вектора состоя-
ния объекта управления, обеспечивающую выполнение тождества ∥e(t)∥ ≡ 0,
а через y∗(t) желаемую траекторию изменения вектора выходных перемен-
ных. Очевидно, что x∗ = Mξ2 и y∗ = Cx∗ = g. Построим генератор желаемой
траектории x∗. Для этого продифференцируем x∗ = Mξ2 с учетом (9). После
элементарных преобразований получаем:
(35)
x∗ = Asx∗ + (M(G2 + L2Θ2) - AsM) ξ2,
где, как и раньше, As = A - BK гурвицева. Выполнение допущений 1 и 2
означает существование пары матриц M иΘ∗2, одновременно удовлетворяю-
щих двум уравнениям [3, 11]
M (G2 + L2Θ2) - AsM = BΘ∗2, CM =Θ∗2.
Тогда окончательно получаем:
{ ˙x∗ = Asx∗ + B Ψ∗2ξ2(t - τ),
(36)
g=y∗ =Cx∗,
Ψ∗
где
= Θ∗2 exp((G2 + L2Θ2)τ) q × m2 неизвестная матрица постоянных
2
коэффициентов.
Виртуальный генератор желаемой траектории (36) может быть переписан
в форме вход-выход
[
]
g = Ws(s)
Ψ2ξ2(t - τ)
или, с использованием леммы о перестановке [41] (см. также лемму 2 и вы-
ражение (26)), в форме статической модели
(37)
g=Ξ2(t-τ
ψ2,
где Ws(s) = C(sI - As)-1B
ψ2 = col(Ψ⊤1,... ,Ψ⊤q) ∈ Rqm2 вектор неизвест-
ных параметров,Ψ⊤i строки матрицыΨ∗2, Ξ2(t - τ) ∈ Rq×qm2 матричный
регрессор вида
Ws11(s)[ξ2(t - τ)] ... Ws1q(s)[ξ2(t - τ)]
Ξ2(t - τ) =
.
Wsq1(s)[ξ2(t - τ)] ... Wsqq(s)[ξ2(t - τ)]
165
Сформируем настраиваемую модель генератора сигнала задания
(38)
ĝ=Ξ2(t-τ
ψ2,
вектор настраиваемых параметров
ψ2 которой генерируется алгоритмом
адаптации
ˆ
(39)
ψ2 = ΓψΞ⊤2(t - τ)εg,
где εg = g - ĝ ошибка воспроизведения сигнала задания, Γψ > 0 матрица
коэффициентов адаптации.
В целях дальнейшего анализа свойств устойчивости замкнутой системы
определим q × m2 матрицу настраиваемых параметровΨ2, построенную на
элементах вектор
ψ2 (процедура, обратная построению вектор
ψ2 из мат-
рицыΨ∗2), а также векто
ψ2
ψ2
ψ2 и матрицуΨ2 =Ψ∗2 -Ψ2 параметри-
ческих ошибок.
Тогда вне зависимости от свойств устойчивости замкнутой системы алго-
ритм адаптации (39) будет обладать следующими свойствами.
Лемма 5. Пусть выполняются допущения 1-4. Тогда алгоритм адапта-
ции (39) совместно с наблюдателем задающего воздействия (8) и настраи-
ваемой моделью (38) будет обеспечивать:
1) ограниченность ∥εg∥,
ψ2∥;
2) асимптотическое стремление ∥εg∥ → 0 при t → ∞;
3) асимптотическое стремление ∥Ψ2(t)ξ2(t)∥ → 0, а также
∥Ψ2(t - τ)ξ2(t - τ)∥ → 0
при t → ∞.
Доказательство. Учтем, что модели ошибки воспроизведения сигнала
задания и вектора параметрических ошибок имеют вид
˜
εg = Ξ2(t - τ
ψ2,
ψ2 = ΓψΞ⊤(t - τ
ψ2.
2
Тогда справедливость леммы доказывается с использованием функции Ля-
пунова Vg = 0,
ψ2Γ-1g
ψ2 и тех же аргументов, что и при доказательстве лем-
мы 3.
Свойства, определенные леммой 5, мотивируют следующий выбор следя-
щей составляющей:
(40)
ut =Ψ2ξ2.
5.2. Построение компенсирующей компоненты
Выберем компенсирующую компоненту в виде
(41)
uc =Ψ1
ξ1,
166
где регрессо
ξ1 формируется наблюдателем возмущения (12), аΨ1 мат-
рица настраиваемых коэффициентов. Подставляя (34) и (41) в (1) c учетом
(13), получаем:
(
)
(42)
x=Ax+B ut(t-τ)+us(t-τ)+Ψ1(t-τ
ξ1(t - τ)
,
гдеΨ1 = Ψ∗1 -Ψ1.
Модель (42) не может быть использована для построения алгоритма адап-
тивной настройки матрицыΨ1, так как содержит ее прошлое значение и в
общем случае неустойчивую матрицу A. В соответствии с изложенным вы-
ше подходом для преодоления этих проблем предлагается использовать схему
расширения [31], которая в данном случае определяется следующей системой
уравнений:
{x = x + φ,
(
)
(43)
φ=Aφ+ Lx+B
(Ψ1(t-τ)-Ψ1(t)
ξ1(t-τ)-ut(t-τ)-us(t-τ)
,
где x расширенный вектор состояния, φ вспомогательный вектор, мат-
рицаL выбрана так, что матриц
A = A + L гурвицева.
Вычисляя производную вектора x в силу (42) и (43), получаем модель
(44)
x=A¯x+B Ψ1(t
ξ1
(t - τ),
которая хорошо известна в современной теории адаптивного управления и
позволяет выбрать, например, градиентный алгоритм адаптации вида
ˆ
(45)
Ψ⊤
=
ξ1(t - τ)B⊤
P x,
1
где Γ ≻ 0 матрица коэффициентов адаптации, а матрица P является реше-
нием уравнения
A⊤P +
A = -Q, Q = Q⊤ ≻ 0 произвольная симметрич-
ная положительноопределенная матрица.
Тогда вне зависимости от свойств устойчивости замкнутой системы алго-
ритм адаптации (45) будет обладать следующими свойствами.
Лемма 6. Пусть выполняются допущения 1-4. Тогда алгоритм адап-
тации (45) совместно с наблюдателем возмущения (12), законом управле-
ния (34) и (41) и схемой расширения (43) применительно к объекту управ-
ления (1) будет обеспечивать:
1) ограниченность ∥x∥ и ∥Ψ1∥,
2) асимптотическое стремление ∥Ψ1(t
ξ1(t)∥ → 0, а также
∥Ψ1(t - τ
ξ1(t - τ)∥ → 0
при t → ∞.
Доказательство. Производная функции Ляпунова Vs = x⊤P x+
+ 0,5Ψ⊤1Γ-1 Ψ1, вычисленная в силу уравнения (44), имеет вид
Vs = -x⊤Qx,
откуда следует ограниченность x иΨ1, стремление ∥x∥ → 0 и ∥˙Ψ1∥ → 0 и,
как следствие, справедливость второго утверждения леммы.
167
5.3. Построение стабилизирующей компоненты
Для стабилизации объекта управления будем использовать вектор состоя-
ния x, который доступен прямым измерениям. Подставляя (34) и (41) в (1),
получаем
(
)
(46)
x = Ax + B ut(t - τ) + us(t - τ) + δ(t - τ) ,
гдеδ(t) =Ψ1(t
ξ1(t)
ошибка компенсации возмущения. Выберем стабили-
зирующую компоненту в виде
∫t
(47)
us = -Kexp(Aτ)x(t) - exp(A(t - µ))B(ut(µ) + us(µ))dµ ,
t-τ
где матрица K обеспечивает гурвицевость матрицы замкнутой системы As =
=A-BK.
Тогда свойства замкнутой системы будут определяться следующим утвер-
ждением.
Утверждение 2. Пусть выполняются допущения 1-4. Тогда алгоритм
управления (34) с наблюдателем возмущения (12) и наблюдателем задаю-
щего воздействия (8), следящей компонентой (40), алгоритмом адапта-
ции следящей компоненты (39), настраиваемой моделью (38), компенсирую-
щей компонентой (41), алгоритмом адаптации компенсирующей компонен-
ты (45), схемой расширения (43) и стабилизирующей компонентой (47)
обеспечивает для объекта управления (1) ограниченность всех сигналов и
выполнение целевого условия (2).
Доказательство. Вычисляя для модели (46) значение вектора состоя-
ния x в момент времени t + τ, можно показать, что
(48)
us(t) = -Kx(t + τ) - Δδ
(t + τ),
где
∫t
Δδ(t + τ) = exp(A(t - µ))Bδ(µ)dµ.
t-τ
Вычисляя теперь производную ошибки слежения e∗ = x∗ - x с учетом (1),
(36), (40), (41), (48), получаем:
(
)
ė∗ = Ase∗ + B
Ψ2(t - τ)ξ2(t - τ) - KΔδ(t) +δ(t - τ) .
Так как в силу леммы 5 имеем ∥Ψ2(t - τ
ξ2(t - τ)∥ → 0, а в силу леммы 6
∥δ∥ → 0 и, следовательно, ∥Δδ∥ → 0, то из последнего выражения непосред-
ственно получаем ограниченность e∗, стремление ∥e∗∥ → 0, выполнение целе-
вого условия 2, а также ограниченность us и x. С учетом ограниченности x
и x (см. лемму 6) из (43) получаем ограниченность φ. Утверждение доказано.
168
5.4. Числовое моделирование
Параметры объекта управления (1), возмущающего воздействия, сигна-
ла задания, а так же наблюдателей задающего воздействия (8) и возмуще-
ния (12) выбраны такими же, как и в примере из раздела 4.4.
Соответствующие параметры и матрицы в выражениях (39), (47) и (45)
выбраны как
[
]
[
]
1,1
0,5
1,75
1
K =
,
Γψ = 2000I8×8, P =
,
Γ = 100I2×2.
0
0
1
0,75
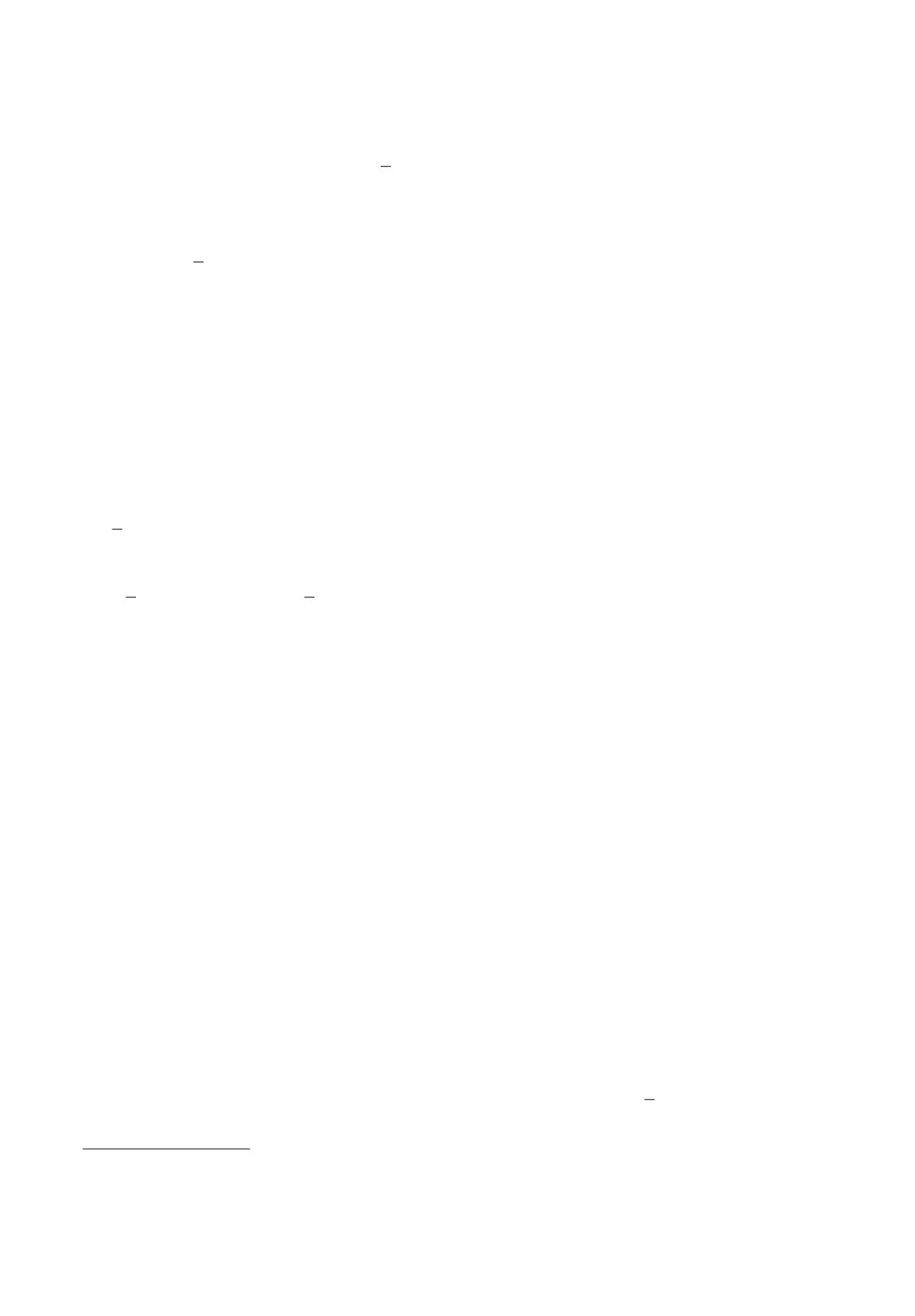
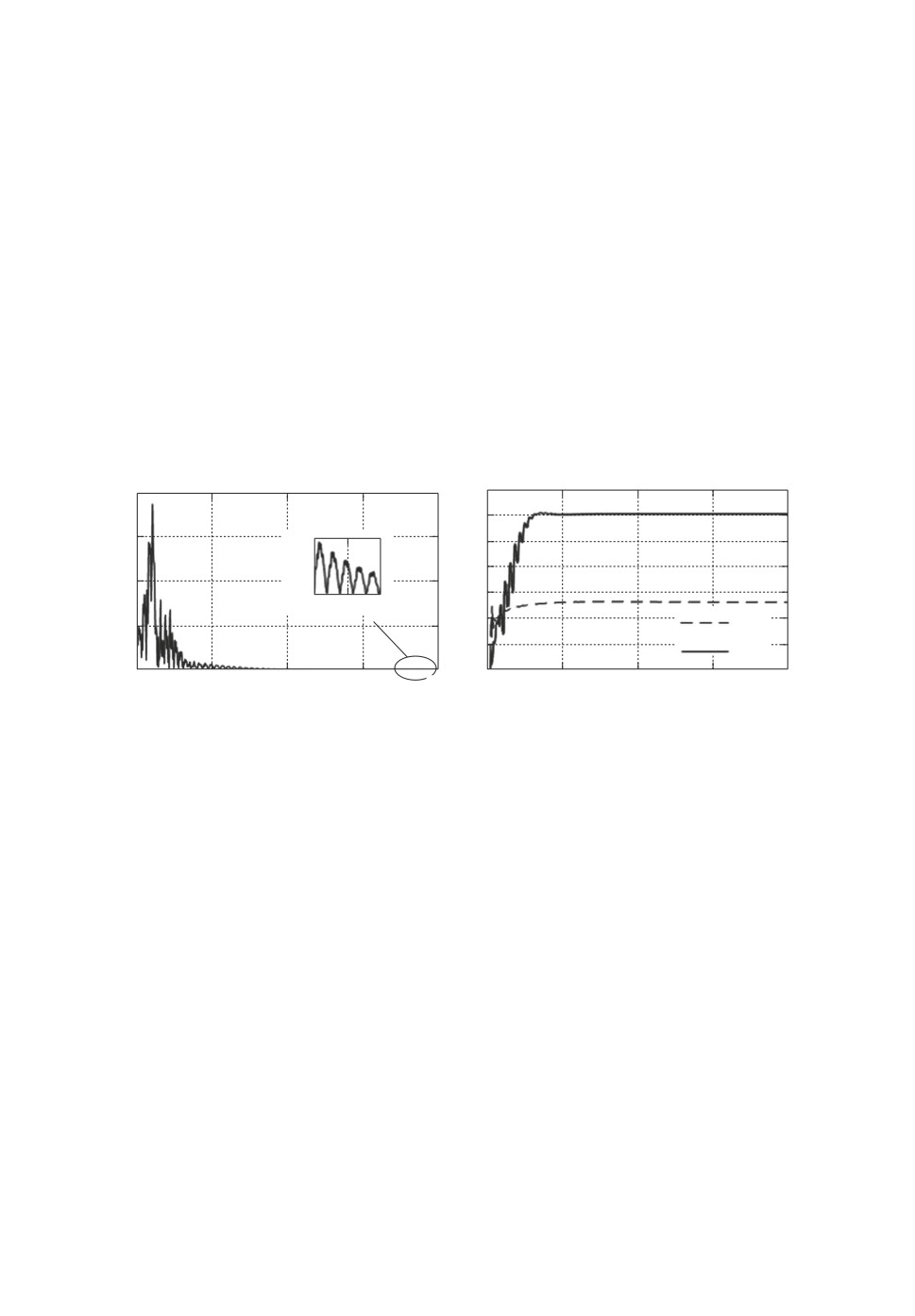
Результаты числового моделирования работы линейной многоканальной
системы, замкнутой адаптивным регулятором с раздельными компонентами
слежения и компенсации, иллюстрируют полную компенсацию внешних воз-
мущений и сходимость ошибки слежения к нулю (см. рис. 2).
^
^
||
||e||
a
б
40
70
60
30
0,01
50
40
20
0
30
180
190
200
20
^
||Y1||
10
10
||^2||
0
50
100
150
200
0
50
100
150
200
t
t
Рис. 2. Графики переходных процессов в системе, замкнутой алгоритмом
управления с раздельными компонентами слежения и компенсации.
6. Заключение
В работе представлены два алгоритма адаптивного слежения за мульти-
гармоническим сигналом для класса линейных неустойчивых многоканаль-
ных объектов с запаздыванием в каналах управления в условиях внешних
возмущений.
Первый алгоритм построен с использованием объединенного регрессора.
Такая схема позволяет одним алгоритмом адаптации (27) осуществлять одно-
временно компенсацию внешних возмущений и слежение за эталонным сиг-
налом. При этом за счет применения схемы с расширенной ошибкой (24)
стабилизирующая компонента закона управления (32) полностью независи-
ма от адаптивной. Поэтому параметры контура стабилизации и расширенной
ошибки могут быть выбраны независимо друг от друга.
Во втором алгоритме использована схема с построением раздельных бло-
ков компенсации и слежения. В этом случае адаптивные компоненты систе-
мы (39) и (45) работают независимо друг от друга, что позволяет провести бо-
169
лее гибкую настройку системы. Благодаря отсутствию фильтрации регрессо-
ра компенсирующего контура и дополнительного наблюдателя состояния (29)
(который присутствует в первой схеме), алгоритм управления с раздельными
адаптивными блоками использует на q2m1 + n меньше интеграторов. В то же
время следует отметить, что параметры стабилизирующего управления (47)
сопряжены с параметрами фильтра регрессора алгоритма адаптации (39) сле-
дящей компоненты (40).
Дальнейшее развитие представленного подхода будет направлено на его
применение для систем с неизмеряемым вектором состояния (что потребует
построения специального наблюдателя возмущения), неизвестными парамет-
рами и запаздыванием.
СПИСОК ЛИТЕРАТУРЫ
1.
Johnson C. D. Accommodation of external disturbances in linear regulator and
servomechanism problems // IEEE Trans. Autom. Control. 1971. V. 16. No. 6.
P. 635-644.
2.
Francis D.A., Wonham W.M. The internal model principle for linear multivariable
regulators // App. Math. Optim. 1975. V. 2. P. 170-194.
3.
Davison E.J. The robust control of a servomechanism problem for linear time-
invariant multivariable systems // IEEE Trans. of Automatic Control. 1976. V. 21.
P. 25-34.
4.
Уонем М. Линейные многомерные системы управления: Геомерический подход.
М: Наука, 1980.
5.
Дроздов В.Н., Мирошник И.В., Скорубский В.И. Системы автоматического
управления с микроЭВМ. Л.: Машиностроение, 1989.
6.
Bodson M., Douglas S.C. Adaptive algorithms for the rejection of sinusoidal distur-
bances with unknown frequency // Automatica. 1997. V. 33. No. 12. P. 2213-2221.
7.
Nikiforov V.O. Adaptive servomechanism controller with an implicit reference
model // Int. J. Control. 1997. V. 68. No. 2. P. 277-286.
8.
Никифоров В.О. Нелинейная система управления с компенсацией внешних де-
терминированных возмущений // Изв. РАН. Теория и системы управления.
1997. № 4. С.69-73.
9.
Никифоров В.О. Адаптивная компенсация внешних детерминированных возму-
щений // Мехатроника, автоматизация и управление. 2003. № 5. С. 8-12.
10.
Никифоров В.О. Адаптивное и робастное управление с компенсацией возмуще-
ний. СПб.: Наука, 2003.
11.
Marino R., Tomei P. Output regulation for linear systems via adaptive internal
model // IEEE Trans. Autom. Control. 2003. V. 48. No. 12. P. 2199-2202.
12.
Byrnes C. I., Isidori A. Nonlinear internal models for output regulation // IEEE
Trans. Autom. Control. 2004. V. 49. No. 12. P. 2244-2247.
13.
Serrani A., Isidori A., Marconi L. Semi-global nonlinear output regulation with
adaptive internal model // IEEE Trans. Autom. Control. 2001. V. 46. No. 8.
P. 1178-1194.
14.
Nikiforov V.O. Nonlinear servocompensation of unknown external disturbances //
Automatica. 2001. V. 37. P. 1647-1653.
15.
Gerasimov D.N., Pashenko A.V., Nikiforov V.O. Improved Adaptive Compensation
of Unmatched Multisinusoidal Disturbances in Uncertain Nonlinear Plants // Amer.
Control Conf. ACC. 2020.
170
16.
Elliot E., Goodwin G.C. Adaptive implementation of the internal model principle //
Proc. of the 23d IEEE Conf. on Decision and Control. 1984. V. 23. P. 1292-1297.
17.
Palaniswami M., Goodwin G.C. An adaptive implementation of the internal model
principle // Proc. of the 1987 Amer. Control Conf. 1987. P. 600-605.
18.
Tao G. Multivariable adaptive control: A survey // Automatica. 2014. V. 50. No. 11.
P. 2737-2764.
19.
Wang L., Isidori A., Liu Z., Su H. Robust output regulation for invertible nonlinear
MIMO systems // Automatica. 2017. V. 82. P. 278-286.
20.
Pyrkin A.A, Smyshlyaev A., Bekiaris-Liberis N., Krstic M. Rejection of sinusoidal
disturbance of unknown frequency for linear system with input delay // Amer. Con-
trol Conf. Baltimore, 2010. P. 5688-5693.
21.
Pyrkin A.A., Smyshlyaev A., Bekiaris-Liberis N., Krstic M. Output control algo-
rithm for unstable plant with input delay and cancellation of unknown biased har-
monic disturbance // Time Delay System Conference, Prague, Czech Republic, 2010.
P. 39-44.
22.
Pyrkin A.A., Bobtsov A.A. Cancelation of unknown multiharmonic disturbance for
nonlinear plant with input delay // Int. J. Adaptive Control Signal Proc. 2012. V. 26.
No. 4. P. 302-315.
23.
Wang J., Vedyakov A.A., Vediakova A.O., Pyrkin A.A., Bobtsov A.A., Shavetov S.V.
Output adaptive controller for a class of MIMO systems with input delay and mul-
tisinusoidal disturbance // IFAC-PapersOnLine. 2015. V. 48. No. 11. P. 892-899.
24.
Pyrkin A.A., Bobtsov A.A., Nikiforov V.O., Vedyakov A.A., Kolyubin S.A.,
Borisov O.I. Output control approach for delayed linear systems with adaptive re-
jection of multiharmonic disturbance // IFAC Proc. Volumes. 2014. V. 47. No. 3.
P. 12110-12115.
25.
Pyrkin A.A., Bobtsov A.A. Adaptive controller for linear system With input de-
lay and output disturbance // IEEE Trans. Autom. Control. 2016. V. 61. No. 12.
P. 4229-4234.
26.
Пыркин А.А., Бобцов А.А., Никифоров В.О. и др. Компенсация полигармони-
ческого возмущения, действующего на состояние и выход линейного объекта с
запаздыванием в канале управления // АиТ. 2015. № 12. С. 43-64.
Pyrkin A.A., Bobtsov A.A., Nikiforov V.O., et al. Compensation of polyharmonic
disturbance of state and output of a linear plant with delay in the control channel //
Autom. Remote Control. 2015. V. 76. No. 12. P. 2124-2142.
27.
Narendra K., Annaswamy A. Stable adaptive systems. New Jersey: Prentice Hall,
1989.
28.
Basturk H.I., Krstic M. Adaptive sinusoidal disturbance cancellation for unknown
LTI systems despite input delay // Automatica. 2015. V. 58. 131-138.
29.
Gerasimov D.N., Nikiforov V.O., Paramonov A.V. Adaptive disturbance compensa-
tion in delayed linear systems: internal model approach // IEEE Conf. on Control
Applications, CCA 2015. 2015. P. 1692-1696.
30.
Annaswamy A., Jang J., Lavretsky E. Stability margins for adaptive controllers in
the presence of time-delay // AIAA Guidance, Navigation, and Control Conf.. 2008.
AIAA 2008-6659. doi: 10.2514/6.2008-6659
31.
Gerasimov D.N., Paramonov A.V., Nikiforov V.O. Algorithms of adaptive distur-
bance compensation in linear systems with arbitrary input delay // Int. J. Control.
2018. DOI:10.1080/00207179.2018.1521527.
32.
Paramonov A.V., Gerasimov D.N., Nikiforov V.O. Fast adaptive compensation of
multi-sinusoidal disturbance in linear MIMO systems with multiple input delays //
Eur. Control Conf. ECC. 2018. P. 2441-2446.
171
33.
Gerasimov D.N., Miliushin A.S., Nikiforov V.O. Algorithms of adaptive tracking of
unknown multisinusoidal signals in linear systems with arbitrary input delay // Int.
J. Adaptive Control Signal Proc. 2019. V. 33. No. 6. P. 900-912.
34.
Gerasimov D.N., Miliushin A.S., Paramonov A.V., Nikiforov V.O. Algorithms of
adaptive tracking of unknown multi-sinusoidal signals in MIMO linear systems with
multiple input delay // Proc. of the 2019 Amer. Control Conf. 2019. P. 3014-3019.
35.
Nikiforov V.O. Adaptive servocompensation of input disturbances // IFAC Proc.
Volumes. 1996. V. 29. No. 1. P. 5114-5119.
36.
Никифоров В.О. Наблюдатели внешних возмущений. 1. Объекты с известными
параметрами // АиТ. 2004. № 10. С. 13-23.
Nikiforov V.O. Observers of External Deterministic Disturbances. I. Objects with
Known Parameters // Autom. Remote Control. 2004. V. 65. No. 10. P. 1531-1541.
37.
Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное и адаптивное
управление сложными динамическими системами. СПб.: Наука, 2000.
38.
Льюнг Л. Идентификация систем. Теория для пользователя. М.: Наука, 1991.
39.
Monopoli R.V. Model reference adaptive control with an augmented error signal //
IEEE Trans. Autom. Control. 1974. V. 19. No. 5. P. 474-484.
40.
Никифоров В.О., Фрадков А.Л. Схемы адаптивного управления с расширенной
ошибкой. Обзор // АиТ. 1994. № 9. С. 3-22.
Nikiforov V.O., Fradkov A.L. Adaptive Control Schemes with Extended Error //
Autom. Remote Control. 1994. V. 55. No. 9. P. 1239-1255.
41.
Morse A.S. Global stability of parameter adaptive control systems // IEEE Trans.
Autom. Control. 1980. V. 25. No. 3. P. 433-439.
42.
Artstein Z. Linear systems with delayed controls: a reduction // IEEE Trans. Autom.
Control. 1982. V. 27. No. 4. P. 869-879.
43.
Engelborghs K., Dambrine M., Roose D. Limitations of a class of stabilization meth-
ods for delay systems // IEEE Trans. Automatic Control. 2001. V. 46. No. 2.
P. 336-339.
44.
Mondie S., Michiels W. Finite spectrum assignment of unstable time-delay systems
with a safe implementation // IEEE Trans. Autom. Control. 2003. V. 48. No. 12.
P. 2207-2212.
45.
Zhong Q.C. On distributed delay in linear control laws-part I: discrete-delay imple-
mentations // IEEE Trans. Autom. Control. 2004. V. 49. No. 11. P. 2074-2080.
Статья представлена к публикации членом редколлегии А.Л. Фрадковым.
Поступила в редакцию 26.10.2019
После доработки 19.12.2019
Принята к публикации 30.01.2020
172