Автоматика и телемеханика, № 8, 2020
© 2020 г. Д.В. БАЛАНДИН, д-р физ.-мат. наук (dbalandin@yandex.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского),
М.М. КОГАН, д-р физ.-мат. наук (mkogan@nngasu.ru)
(Нижегородский государственный архитектурно-строительный университет)
УПРАВЛЕНИЕ И ОЦЕНИВАНИЕ В ЛИНЕЙНЫХ
НЕСТАЦИОНАРНЫХ СИСТЕМАХ НА ОСНОВЕ
ЭЛЛИПСОИДАЛЬНЫХ МНОЖЕСТВ ДОСТИЖИМОСТИ1
Показано, что множеством достижимости линейной нестационарной
непрерывной или дискретной системы, в которой сумма квадратичной
формы начального состояния и интеграла или суммы квадратичных
форм возмущения на конечном интервале времени ограничена сверху
заданной величиной, является эволюционирующий эллипсоид. Матри-
ца эллипсоида удовлетворяет линейному матричному дифференциаль-
ному или разностному уравнению соответственно. Синтезированы оп-
тимальные эллипсоидальные наблюдатель и алгоритм идентификации,
обеспечивающие наилучшие эллипсоидальные оценки состояния системы
и неизвестных параметров, а также оптимальные регуляторы, обеспечи-
вающие попадание состояния системы в целевое множество или удержа-
ние траектории системы в эллипсоидальной трубке. Установлено соответ-
ствие между оптимальным эллипсоидальным наблюдателем и фильтром
Калмана. Приведены иллюстрирующие примеры для уравнения Матье,
описывающего параметрические колебания линейного осциллятора.
Ключевые слова: линейная нестационарная система, эллипсоидальное
множество достижимости, оптимальное управление, оптимальное оцени-
вание.
DOI: 10.31857/S0005231020080024
1. Введение
Авторы посвящают эту статью памяти Ю.И. Неймарка, учениками кото-
рого (прямыми или косвенными) они являются. Хочется повторить слова,
которые Юрий Исаакович написал в эпиграфе своей последней монографии
“Математическое моделирование как наука и искусство” [1, 2]: “В науке и ее
приложениях, как и в жизни, самое главное - понимание. Оно всегда просто,
но добывается трудно.”
В монографии [3] Ю.И. Неймарк изложил результаты широкого круга сво-
их исследований, касающихся вопросов устойчивости, управления и опти-
мизации в динамических системах. Одна из важных тем этих исследований
относилась к задачам управления в условиях неопределенности математи-
ческой модели объекта управления и действующих возмущений. Эта тема
развивалась в последующих работах Ю.И. Неймарка (см., например, [4-7]) и
изучается в настоящей работе.
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проекты №№ 18-41-520002, 19-01-00289), проекта № 0729-2020-0055 и научно-
образовательного математического центра “Математика технологий будущего”.
8
В задачах оценивания и управления в динамических системах при отсут-
ствии полной информации о начальных условиях, возмущениях и помехах
в измерениях важную роль играет множество достижимости системы, пони-
маемое как множество всех состояний, в которых система может оказаться в
данный момент времени при всевозможных допустимых значениях неопреде-
ленных факторов. Характеризация множеств достижимости и их зависимо-
сти от параметров системы позволяет проектировать оптимальные системы
оценивания и управления, при которых множества достижимости синтези-
рованной системы в данный момент времени или в течение некоторого ин-
тервала времени включены в желаемые целевые множества с оптимальными
характеристиками.
Классическая задача Б.В. Булгакова о влиянии ограниченных возмущений
на линейную динамическую систему была поставлена и решена в [8]. Пробле-
ма нахождения или оценивания множеств достижимости активно изучается
с конца 60-х г. прошлого века и до сих пор продолжает привлекать внимание
специалистов в области теории управления и ее приложений [9-19]. В силу
линейности системы состояние в данный момент времени есть сумма двух
векторов: состояния невозмущенной системы с неопределенным начальным
состоянием и состояния возмущенной системы с нулевым начальным состоя-
нием. Если множество начальных состояний выбрать эллипсоидальным и
множество достижимости возмущенной системы аппроксимировать эллип-
соидом, то возникает задача описания геометрической суммы двух эллипсои-
дов, которая является выпуклым множеством, но не эллипсоидом. В задачах
рекуррентного оценивания возникает необходимость в нахождении эллипсои-
да наименьшего размера, включающего пересечение двух эллипсоидов. Для
описания таких множеств обычно стараются получать их верхние и ниж-
ние эллипсоидальные аппроксимации. Все это привело к развитию техники
оперирования с эллипсоидами. Несмотря на значительный прогресс в этом
направлении, связанный с применением линейных матричных неравенств и
соответствующего программного обеспечения, проблема остается открытой
в силу того, что методы, основанные на эллипсоидальных аппроксимациях
множеств достижимости, трудно применить для синтеза оптимальных систем
оценивания и управления за исключением очень простых случаев.
В недавних работах [20-23] было введено понятие максимального укло-
нения выхода линейной нестационарной системы на конечном интерва-
ле времени при неопределенных начальном состоянии и возмущении. По-
существу, это индуцированная норма оператора, порожденного системой и
отображающего пару, состоящую из вектора начального состояния и вектор-
функции возмущения, в целевой выход, где квадрат “величины” пары изме-
ряется суммой квадратичной формы начального состояния и интеграла от
квадратичной формы возмущения, а “величина” выхода измеряется макси-
мальным по времени значением его евклидовой нормы. Для линейной стацио-
нарной системы на бесконечном интервале времени при нулевых начальных
условиях подобная характеристика была введена в [24] и названа обобщенной
H2-нормой системы. В [20-23] максимальное уклонение выхода характеризу-
ется в терминах решений линейного матричного дифференциального уравне-
ния или неравенств и на основе этого синтезируется оптимальное управление,
9
минимизирующее максимальное уклонение выхода. Эти результаты навели
авторов на мысль о том, что когда сумма квадратичной формы начального со-
стояния и интеграла от квадратичной формы возмущения ограничена сверху
заданной величиной, состояние системы принадлежит эллипсоиду с матри-
цей, удовлетворяющей указанному линейному дифференциальному уравне-
нию. Подтверждение такого предположения было найдено в работах [11, 13],
в последней из которых методом динамического программирования показа-
но, что при аналогичном ограничении множеством достижимости системы
является эллипсоид, матрица которого является решением дифференциаль-
ного уравнения Риккати. На этой основе в [13] был построен оптимальный
наблюдатель, обеспечивающий эллипсоидальную оценку состояния системы.
Однако указанные результаты получены при достаточно жестких условиях
невырожденности квадратичных форм начального состояния и возмущений,
которые означают, что начальное состояние должно принадлежать невырож-
денному эллипсоиду, а возмущения должны присутствовать в уравнении для
каждой компоненты состояния и в измерении каждой компоненты выхода.
В данной работе эти результаты развиваются в нескольких направлени-
ях одновременно как для непрерывных (см. также [25]), так и для дискрет-
ных линейных нестационарных систем. Во-первых, показано, что в случае
вырожденных квадратичных форм в совместном ограничении на начальное
состояние и возмущение и, в частности, в крайних случаях, когда возмущение
отсутствует или когда начальное состояние нулевое, множествами достижи-
мости системы также являются эллипсоиды, в том числе и вырожденные.
Необходимость в изучении множеств достижимости в случае вырожденной
квадратичной формы начального состояния возникает, например, в зада-
чах управления механическими системами с ударными воздействиями, когда
некоторые переменные состояния известны, а некоторые испытывают мгно-
венные неопределенные изменения. Рассмотрение этого вопроса потребовало
применить иной подход для обоснования результата, который привел к ли-
нейным матричным дифференциальному или разностному уравнениям Ляпу-
нова, описывающим динамику эллипсоидального множества достижимости в
непрерывном и дискретном случаях. Установлено, что величина максималь-
ной на заданном интервале времени полуоси эллипсоидального множества
достижимости для данного выхода системы действительно совпадает с обоб-
щенной H2-нормой системы при ненулевых начальных условиях. Во-вторых,
получено уравнение оптимального эллипсоидального наблюдателя, обеспе-
чивающего оценку состояния в виде эллипсоида минимального размера в
том числе и в вырожденном случае, когда возмущения в системе и поме-
хи в измерениях могут отсутствовать в некоторых уравнениях. Выявлена
связь оптимального эллипсоидального наблюдателя в задачах фильтрации и
идентификации неизвестных параметров с фильтром Калмана и рекуррент-
ным алгоритмом метода наименьших взвешенных квадратов соответственно.
В-третьих, показано, как синтезировать ограниченное управление, при кото-
ром состояние системы попадает в целевое эллипсоидальное множество или
траектория системы удерживается в заданной эллипсоидальной трубке. Все
результаты иллюстрируются на примере линейного нестационарного осцил-
лятора, описываемого уравнением Матье.
10
2. Эллипсоидальные множества достижимости
Рассмотрим динамический объект, описываемый нестационарной системой
линейных дифференциальных или разностных уравнений
(2.1)
∂x(t) = A(t)x(t) + B(t)v(t), x(t0) = x0, t ∈ [t0,tf
],
где ∂ - оператор дифференцирования в непрерывном случае или опера-
тор сдвига на единицу вперед в дискретном случае при t = t0, t0 + 1, . . . , tf ,
x ∈ Rnx - состояние объекта, v ∈ Rnv - возмущение, действующее на объект.
Введем обозначения, позволяющие в дальнейшем рассматривать параллель-
но непрерывный и дискретный случаи: для вектора a и для непрерывной или
дискретной вектор-функции b(t) на интервале [t0, t] обозначим:
t
∫
bT(σ)M-1(σ)b(σ)dσ,
|a|2Q = aTQ-1a,
∥b∥2M[t
t0
0,t]
=
∑
bTiM-1ibi
i=t0
для обратимых матриц Q, M(σ) и Mi. Если обозначение матрицы у нормы
отсутствует, это значит матрица единичная.
Предположим, что начальное состояние x(t0) и возмущение v = v(σ),
σ ∈ [t0,t] принадлежат множеству допустимых пар начальных состояний и
возмущений, определяемому как
S(t, t0; R, G) =
{
}
(2.2)
= (x, v(σ)) : x = R1/2w1, v(σ) = G1/2(σ)w2(σ), |w1|2 + ∥w2∥2[t
≤1
0
,t]
для заданных матрицы RT = R ≥ 0 и матричной функции GT(σ) = G(σ) ≥ 0,
σ ∈ [t0,t]. Если R > 0 и G(σ) > 0, σ ∈ [t0,t], то, выражая w1 и w2(σ) из пер-
вых двух равенств в (2.2) и подставляя в последнее неравенство, получим,
что в невырожденном случае допустимые начальные условия и возмущения
удовлетворяют неравенству
(2.3)
|x(t0)|2R + ∥v∥2G[t
≤ 1.
0,t]
Левую часть этого неравенства можно интерпретировать как квадрат меры
неопределенности в системе для текущего момента времени, а само условие
(2.3)
как то, что мера неопределенности в системе не превышает известной
величины, которую, не умаляя общности, можно принять единицей. Други-
ми словами, начальное состояние находится внутри заданного эллипсоида, а
“энергия” возмущения ограничена величиной, зависящей от начального со-
стояния. Смысл этого совместного ограничения на начальное состояние и
возмущение можно пояснить следующим образом. Состояние линейной си-
стемы в текущий момент времени зависит линейно от начальных условий
и возмущения и их увеличение приводит к соответствующему увеличению
переменных состояния. Для того чтобы характеризовать поведение системы
при неопределенных начальных условиях и возмущениях, имеет смысл нор-
мировать текущее значение евклидовой нормы состояния величиной, равной
11
указанной сумме, или, что то же самое для линейных систем, ограничить
указанную сумму единицей.
Весовая матрица R при заданной G(σ) отражает относительную важность
учета неопределенностей начальных условий и внешнего возмущения: чем
“больше” R, тем больший вес придается неопределенности в начальных усло-
виях. Из (2.2) следует, что множество начальных состояний системы совпа-
дает с эллипсоидом E(R) = {x = R1/2w : |w| ≤ 1}. Если R > 0, то приходим
к стандартному представлению эллипсоида E(R) = {x : xTR-1x ≤ 1}. Если
R ≥ 0, то E(R) - вырожденный эллипсоид, аффинная размерность которого
совпадает с рангом матрицы R [26, с. 30]. Обозначим через ϕ(t; τ, x, v) ре-
шение уравнения (2.1) с начальным условием ϕ(τ) = x при соответствующей
функции v = v(σ), σ ∈ [τ, t].
Задача состоит в описании множества состояний, в которых система мо-
жет оказаться в определенный момент времени при всевозможных начальных
состояниях и возмущениях, принадлежащих множеству S(t, t0; R, G).
Определение 1. Множеством достижимости D(t,τ,E(R)) систе-
мы (2.1) в момент времени t ≥ τ называется совокупность концов траек-
торий ϕ(t;τ,xτ ,v) при всех допустимых начальных состояниях xτ ∈ E(R) в
момент времени τ и возмущениях v(σ), σ ∈ [τ, t], принадлежащих множе-
ству S(t,τ;R,G).
Теорема 2.1. Множеством достижимости системы (2.1) в момент
времени t ≥ t0 при всех допустимых начальных состояниях и возмущени-
ях, принадлежащих множеству S(t, t0; R, G), t ∈ [t0, tf ] с R ≥ 0 и G(σ) ≥ 0,
σ ∈ [t0,t], является эллипсоид
(2.4)
D(t, t0
,E(R)) = E(P(t)),
матрица P (t) ≥ 0 которого в непрерывном случае
решение линейного
матричного дифференциального уравнения
˙
(2.5)
P
= A(t)P + P AT(t) + B(t)G(t)BT
(t)
и в дискретном случае решение линейного матричного разностного урав-
нения
(2.6)
P (t + 1) = A(t)P (t)AT(t) + B(t)G(t)BT
(t)
с начальным условием P(t0) = R.
Доказательство теоремы 2.1. В непрерывном случае решение урав-
нения (2.5) имеет вид
∫t
(2.7)
P (t) = Φ(t, t0)P (t0)ΦT(t, t0) + Φ(t, τ)B(τ)G(τ)BT(τ)ΦT
(t, τ)dτ ,
t0
где Φ(t, τ) - решение уравнения
dΦ(t, τ)
= A(t)Φ(t, τ), Φ(τ, τ) = I.
dt
12
Рассмотрим сначала регулярный случай R > 0 и G(t) > 0, t ∈ [t0, tf ]. Так
как Φ(t, τ) - невырожденная матрица, то тогда P (t) > 0, t ∈ [t0, tf ]. Рассмот-
рим положительно определенную квадратичную форму V (t, x) = xTP-1(t)x
с матрицей P (t), удовлетворяющей уравнению (2.5). Вычислим ее про-
изводную в силу системы (2.1), принимая во внимание, что d(P-1)/dt =
= -P-1( P)P-1:
V
(2.8)
= vTG-1v - (v - v∗)TG-1(v - v∗
),
где v∗(t) = G(t)BT(t)P-1(t)x(t), а x(t) - решение уравнения
[
]
(2.9)
x=
A(t) + B(t)G(t)BT(t)P-1(t)
x.
Интегрируя (2.8) на интервале [t0, t], имеем
(2.10)
xT(t)P-1(t)x(t) = |x(t0)|2R + ∥v∥2G[t0,t]-∥v-v∗∥G [t0,t].
Так как R > 0 и G(σ) > 0, то для (x0, v(σ)) ∈ S(t, t0; R, G) выполняется нера-
венство (2.3). Следовательно,
(2.11)
xT(t)P-1
(t)x(t) ≤ 1,
т.е. x(t) ∈ E(P (t)).
Покажем, что для любой точки x ∈ E(P (t)) найдется точка x0 ∈ E(R) и
возмущение v(σ), σ ∈ [t0, t], принадлежащие S(t, t0; R, G), такие что выпол-
няется ϕ(t; t0, x0, v) = x. Возьмем v(σ) = v∗(σ), где x(σ) - решение уравнения
(2.9) с конечным условием x(t) = x. Очевидно, что в качестве искомой точки
следует взять начальную точку x0 = x(t0) этой траектории. С учетом (2.10)
получим
|x0|2R + ∥v∗∥2G[t
= xTP-1(t)x ≤ 1.
0,t]
Следовательно, |x0|2R ≤ 1, т.е. x0 ∈ E(R0).
Рассмотрим теперь вырожденный случай R ≥ 0 и G(t) ≥ 0, t ∈ [t0, tf ]. Вве-
дем матрицы
Rε = R + εI > 0, Gε(t) = G(t) + εI > 0.
Решение уравнения (2.5), в котором матрица G(t) заменена матрицей Gε(t)
и начальное условие есть P (t0) = Rε, имеет вид Pε(t) = P (t) + εP1(t) > 0,
где P1(t) > 0 - решение уравнения (2.5) при G(σ) ≡ I и R = I. Согласно
доказанному невырожденный эллипсоид E(Pε(t)) есть множество достижи-
мости системы при начальных состояниях и возмущениях из множества
S(t, t0; Rε, Gε).
Покажем, что множество достижимости системы при начальных со-
стояниях и возмущениях из множества S(t, t0; R, G) в случае R ≥ 0
и G(t) ≥ 0 также представляется в виде вырожденного эллипсоида{}
E (P (t)) = x = P1/2(t)w, |w| ≤ 1 . Для этого сначала покажем, что для про-
извольной пары из S(t, t0; R, G) конец траектории в момент t будет принад-
лежать эллипсоиду E(P (t)). Зафиксируем начальное состояние x0 ∈ E(R) и
выберем некоторое малое ε > 0. Поскольку S(t, t0; R, G) ⊂ S(t, t0; Rε, Gε), то
13
для данного начального состояния и некоторого допустимого возмущения
конец фазовой траектории x(t) = ϕ(t; t0, x0, v) в момент t будет принадле-
жать эллипсоиду E(Pε(t)) для любого сколь угодно малого ε. Это значит, что
x(t) ∈ E(P (t)).
Покажем теперь, что для любого состояния x(t) ∈ E(P (t)) найдется па-
ра (x∗0, v∗(σ)) ∈ S(t, t0; R, G), для которой x(t) = ϕ(t; t0, x∗0, v∗). Так как x(t) ∈
∈ E(Pε(t)) и E(Pε(t)) - область достижимости системы в регулярном слу-
чае при Rε > 0 и Gε(σ) > 0, то найдется пара (xε0, vε(σ)) ∈ S(t, t0; Rε, Gε), где
xε0 = (R + εI)1/2wε1, vε(σ) = (G + εI)1/2wε2(σ), |wε1|2 + ∥wε2(σ)∥2 ≤ 1, для кото-
рой x(t) = ϕ(t; t0, xε0, vε). Возьмем последовательность εn → 0 при n → ∞. Так
как последовательность (wεn1 , w2n (σ)) ограничена в гильбертовом простран-
стве со скалярным произведением
∫
t
(
) (
)
< w(1)1,w(1)2(σ)
, w(2)1,w(2)2(σ)
>= w(1)T1w(2)1 + w(1)T2(σ)w(2)2(σ)dσ,
t0
то она содержит слабо сходящуюся подпоследовательность [27, теорема 1.8.1].
Согласно [27, теорема 1.8.4] из указанной подпоследовательности можно
извлечь такую подпоследовательность (wεnk1 , w2nk (σ)), что последователь-
∑m
ность ее средних арифметических
k=1
(wεnk1 , w2nk (σ))/m сильно сходится к
(w∗1, w∗2(σ)) при m → ∞. Так как множество {(w1, w2(σ)): |w1|2 + ∥w2(σ)∥2 ≤ 1}
выпукло и замкнуто, то все члены последней последовательности принад-
лежат этому множеству и |w∗1|2 + ∥w∗2(σ)∥2 ≤ 1. В силу принципа супер-
позиции для линейной системы траектории с начальными состояниями и
возмущениями, соответствующими каждой паре указанной последователь-
ности средних арифметических, в момент времени t попадают в x(t). Так
∑m
как εm =
εnk /m → 0 при m → ∞, то R + εmI → R, G(σ) + εmI → G(σ),
k=1
P (t) + εmP1(t) → P (t) при m → ∞. Следовательно, (x∗0, v∗(σ)) с x∗0 = R1/2w∗1
и v∗(σ) = G1/2w∗2(σ) есть искомая пара.
Замечание 1. Возможно альтернативное доказательство утверждения
теоремы, основанное на понятии опорной функции множества достижимо-
сти [11], вычисление которой сводится к максимизации скалярного произве-
дения на шаре2.
Переходим к дискретному случаю. Начнем со вспомогательного утвержде-
ния, доказательство которого приведено в Приложении.
Лемма 2.1. Пусть S (m × n)-матрица, причем m ≤ n. Следующие два
множества совпадают:
S1 = {x = Sg
∀g ∈ Rn : |g| ≤ 1} =
{
}
= x = (SST)1/2w
∀w ∈ Rm : |w| ≤ 1
=S2,
где S2 - эллипсоид, матрица которого SST.
2 Это доказательство любезно предоставил авторам А.И. Матасов.
14
Решение уравнения (2.1) имеет вид
∑
(2.12)
x(t) = Ψ(t, t0)x(t0) +
Ψ(t, i + 1)B(i)v(i), t ≥ t0
+ 1,
i=t0
где переходная матрица
{
A(t - 1)A(t - 2) · · · A(t0), t ≥ t0 + 1,
Ψ(t, t0) =
I, t=t0,
является решением разностного уравнения
(2.13)
Ψ(t + 1, t0) = A(t)Ψ(t, t0), Ψ(t0, t0) = I, t ≥ t0.
С учетом (2.2) запишем (2.12) в виде
(2.14)
x(t) = Stgt, gTtgt
≤ 1,
где
(
)
St =
Ψ(t, t0)R1/2 Ψ(t, t0 + 1)B(t0)G1/2(t0) · · · Ψ(t, t)B(t - 1)G1/2(t - 1)
,
(
)
gt = col
w1,w2(t0),··· ,w2(t - 1)
Заметим, что StSTt = P (t) ≥ 0, где
∑
P (t) = Ψ(t, t0)RΨT(t, t0) +
Ψ(t, i + 1)B(i)G(i)BT(i)ΨT(t, i + 1),
i=t0
т.е. матрица P (t) является решением разностного уравнения (2.6). Таким об-
разом, множество достижимости в момент времени t образуют все векто-
ры вида (2.14). В силу леммы 2.1 это множество совпадает с эллипсоидом
E (P (t)). Теорема доказана.
Следствие 2.1. Множество достижимости системы (2.1) при на-
чальных состояниях и возмущениях из множества S(t, t0; R, G) обладает
эволюционным свойством
D(t, t0, E(R)) = D(t, τ, D(τ, t0, E(R))),
так как D(τ, t0, E(R)) = E(P (τ)) и D(t, τ, E(P (τ))) = D(t, t0, E(R)) для любого
τ ∈ [t0,t].
Замечание 2. Заметим, что уравнения (2.5) и (2.6) в теореме 2.1 совпа-
дают с уравнениями для ковариационных матриц Ex(t)xT(t) состояния си-
стемы (2.1) в непрерывном и дискретном случаях, когда начальное состояние
и возмущения являются случайными независимыми процессами с нулевыми
математическими ожиданиями и заданными ковариационными матрицаами
Ex(t0)xT(t0) = R, Ev(t)vT(t) = G(t) [28].
Замечание 3. Непосредственно, но достаточно громоздко проверяется,
что в дискретном случае при условии det A(t) = 0, R > 0 и G(t) > 0 для при-
ращения функции V (t) = xTP-1(t)x, где P (t) > 0, t ∈ [t0, tf ] решение урав-
15
нения (2.6), в силу системы тождественно выполняется
ΔV (t) = vT(t)G-1(t)v(t) -
(2.15)
-(v(t) - v∗(t))T[G-1(t) - BT(t)P-1(t + 1)B(t)](v(t) - v∗(t)),
где v∗(t) = [G-1(t) - BT(t)P-1(t + 1)B(t)]-1BT(t)P-1(t + 1)A(t)x(t). Нера-
венство G-1(t) - BT(t)P-1(t + 1)B(t) > 0 по лемме Шура эквивалентно нера-
венству P (t + 1) - B(t)G(t)BT(t) > 0, которое выполняется в силу уравне-
ния (2.6). Следовательно, суммируя тождества (2.15) и учитывая начальное
условие P (t0) = R, а также (2.3), получим
xT(tf)P-1(tf)x(tf ) ≤ 1,
т.е. x(tf ) ∈ E(P (tf )) для всех допустимых начальных состояний и возмуще-
ний.
В частном случае, когда возмущения отсутствуют и начальное состояние
принадлежит эллипсоиду E(R), R ≥ 0, т.е. множеством допустимых началь-
ных состояний и возмущений является S(t, t0; R, 0), множество достижимости
системы (2.1) есть эллипсоид E(P0(t)), матрица которого P0(t) ≥ 0 - реше-
ние уравнения (2.5) или (2.6) при G(t) ≡ 0 с начальным условием P0(t0) = R.
В другом частном случае при нулевом начальном состоянии, когда множе-
ство допустимых начальных состояний и возмущений составляет S(t, t0; 0, G),
множеством достижимости является эллипсоид E(Pv(t)), матрица которого
Pv(t) ≥ 0 - решение уравнения (2.5) или (2.6) с нулевым начальным усло-
вием Pv(t0) = 0. Так как решение неоднородного уравнения представимо в
виде
(2.16)
P (t) = P0(t) + Pv
(t),
то E(P0(t)) ⊆ E(P (t)) и E(Pv(t)) ⊆ E(P (t)).
Замечание 4. Обратим внимание на возможность определения множе-
ства достижимости с помощью решения обратной задачи: для заданной мат-
рицы S > 0 найти матрицу R > 0 такую, что множество достижимости систе-
мы (2.1) в момент времени t ≥ t0 при всех допустимых начальных состояниях
и возмущениях, принадлежащих множеству S(t, t0; R, G), совпадает с эллип-
соидом E(S). Действительно, запишем уравнения
(2.17)
Q=-AT(t)Q-QA(t)-QB(t)G(t)BT(t)Q
для непрерывного случая и
(2.18)
Q(t) = AT(t)Q(t + 1)A(t) - AT(t)Q(t + 1)B(t)M-1(t)BT
(t)Q(t + 1)A(t)
с M(t) = G-1(t) - BT(t)Q(t + 1)B(t) > 0 для дискретного случая, которые
являются сопряженными к уравнениям (2.5) и (2.6). Задавая Q(tf ) = S-1
в уравнениях (2.17) и (2.18) и находя Q(t0), получим, что заданный эллипсо-
ид E(S) является областью достижимости системы (2.1) при всех начальных
состояниях и возмущениях, принадлежащих множеству S(t, t0; Q-1(t0), G).
Далее, пусть z = Cz(t)x - некоторый выход системы (2.1). Если x(t) ∈
∈ E(P(t)), т.е. x(t) = P1/2(t)w, где |w| ≤ 1, то z(t) = Cz(t)P1/2(t) w. Со-
гласно лемме 2.1 множество всех таких векторов составляет эллипсоид
16
{
}
(
)
(
)
E
Cz(t)P(t)CTz(t)
= z:z=
Cz(t)P(t)CTz(t)
1/2 g, |g| ≤ 1 , а максимальное
значение евклидовой нормы выхода совпадает с величиной максимальной по-
луоси этого эллипсоида, т.е.
(
)
(2.19)
max
|z(t)| = λ1/2max
Cz(t)P(t)CTz(t)
(x0,v)∈S(t,t0;R,G)
Если R > 0 и G(σ) > 0, σ ∈ [t0, t], то максимальное значение этой величины
на заданном отрезке времени [t0, tf ]
sup
|z(t)|
t∈[t0,tf ]
sup
max
|z(t)| =
max
(
)1/2 =
(x0,v)∈S(t,t0;R,G)
x(t0)=0,v≡0
t∈[t0,tf ]
(2.20)
|x(t0)|2R + ∥v∥2
G [t0,t]
= sup λ1/2max(Cz(t)P(t)CTz(t))
t∈[t0,tf ]
совпадает с максимальным уклонением выхода, которое при G(σ) ≡ I яв-
ляется обобщенной H2-нормой системы при ненулевых начальных услови-
ях [20-23].
Полученный в теореме 2.1 результат непосредственным образом перено-
сится на случай, когда область неопределенности начального состояния есть
эллипсоид с центром не в нуле, а в заданной точке x∗. Действительно, пусть
начальное состояние и возмущение системы (x0, v(σ)) представимы в виде
x0 = x∗ + R1/2w1, v(σ) = G1/2(σ)w2(σ),
|w1|2 + ∥w2∥2[t
≤ 1.
0,t]
Отсюда следует, что начальное состояние принадлежит эллипсоиду E(R, x∗)
с центром в x∗ и матрицей R. В силу линейности системы представим ее
решение в виде двух слагаемых: решения возмущенной системы с началь-
ным состоянием, принадлежащим соответствующему эллипсоиду с центром
в начале координат, и решения невозмущенной системы с начальным состоя-
нием x∗, т.е.
ϕ(t; t0, x0, v) = ϕ(t; t0, x0 - x∗, v) + ϕ∗(t), ϕ∗(t) = ϕ(t; t0, x∗, 0).
Тогда из теоремы 2.1 следует, что в этом случае множество достижимости
системы в момент времени t представляет собою эллипсоид с центром в точ-
ке ϕ∗(t) и матрицей P (t), т.е.
D(t, t0, E(R, x∗)) = E(P (t), ϕ∗(t)).
Для иллюстрации теоремы 2.1 рассмотрим известное уравнение Матье,
описывающее параметрические колебания линейного осциллятора. Предста-
вим это уравнение в виде системы дифференциальных уравнений
x1 = x2,
(2.21)
x2 = -ω20(1 + εsin ωt)x1 + v,
x1(0) = x10, x2(0) = x20,
где ω0, ω и ε - заданные параметры, v = v(t) - внешнее возмущение, дейст-
вующее на осциллятор. Известно [1, с. 162], что при определенном соотно-
шении параметров в рассматриваемой системе возможен параметрический
17
x2
x2
1,6
2,4
t = 1,0
t = 5,1
0,8
1,2
0
0
-0,8
-1,2
-2,4
-1,6
-0,8
0
0,8
1,6
-1,8
-0,9
0
0,9
1,8
x1
x1
x2
x2
16
16
8
8
0
0
-8
-8
t = 20,7
t = 60,0
-16
-16
-4
-2
0
2
4
-160
-80
0
80
160
x1
x1
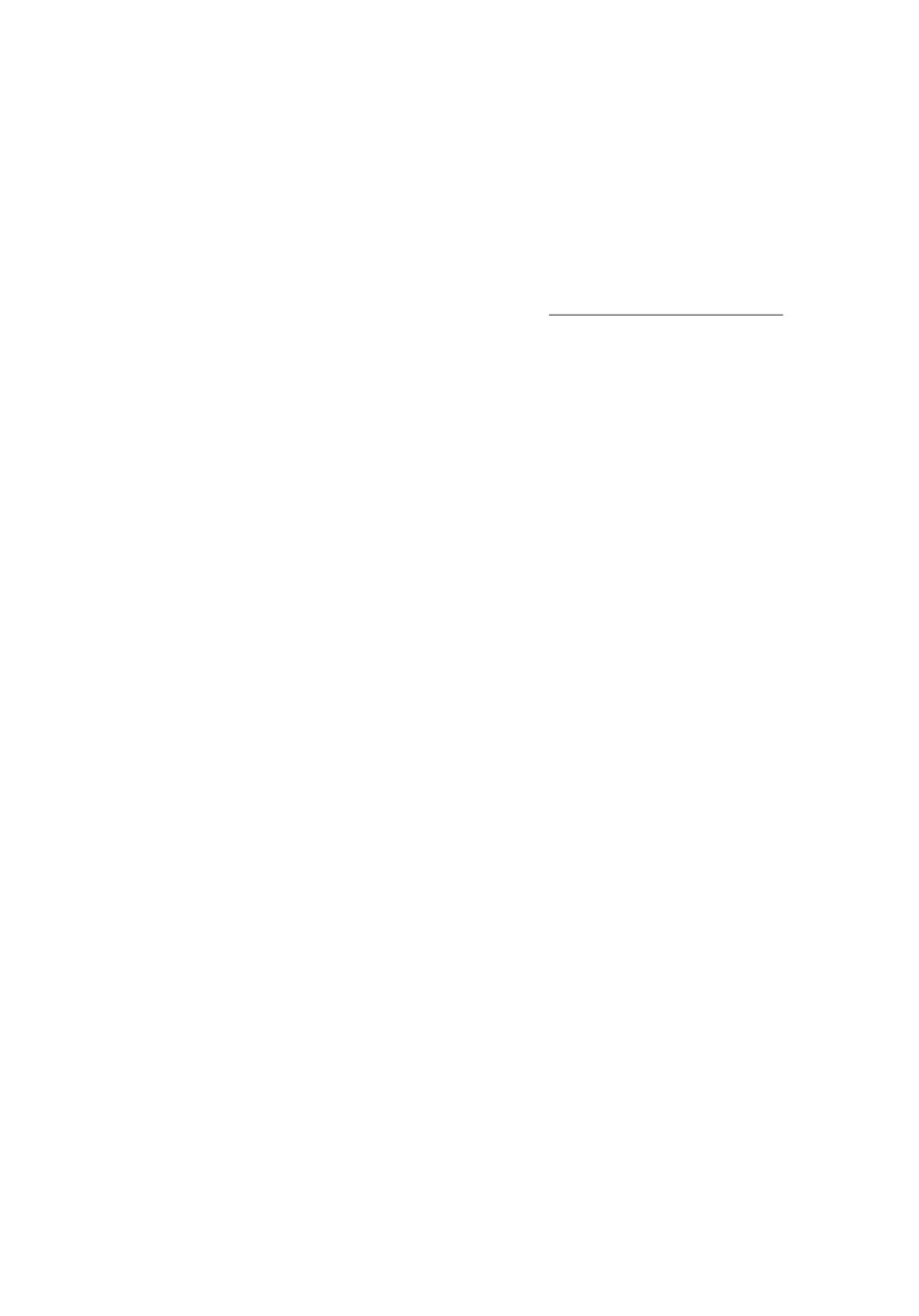
Рис. 1. Динамика множеств достижимости уравнения Матье в регулярном случае.
резонанс. Основной резонанс возникает при соотношении ω0/ω = 1/2. Далее
при проведении вычислительных экспериментов будем полагать, что ω0 = π,
ω = 2π, ε = 0,1.
На рис. 1 для моментов времени 1, 5,1, 20,7, 60 показаны множества дости-
жимости для регулярного случая, когда R = diag(1, 1), G(σ) ≡ 1 (сплошная
линия), для вырожденного случая, когда отсутствует внешнее возмущение
G(σ) ≡ 0 (пунктирная линия), и для вырожденного случая, когда началь-
ное состояние нулевое R = 0 (штрих-пунктирная линия). Заметим, что при
t = 60 эллипс, обозначенный пунктирной линией, имеет длины полуосей, рав-
ные 0,0093 и 111,75 соответственно.
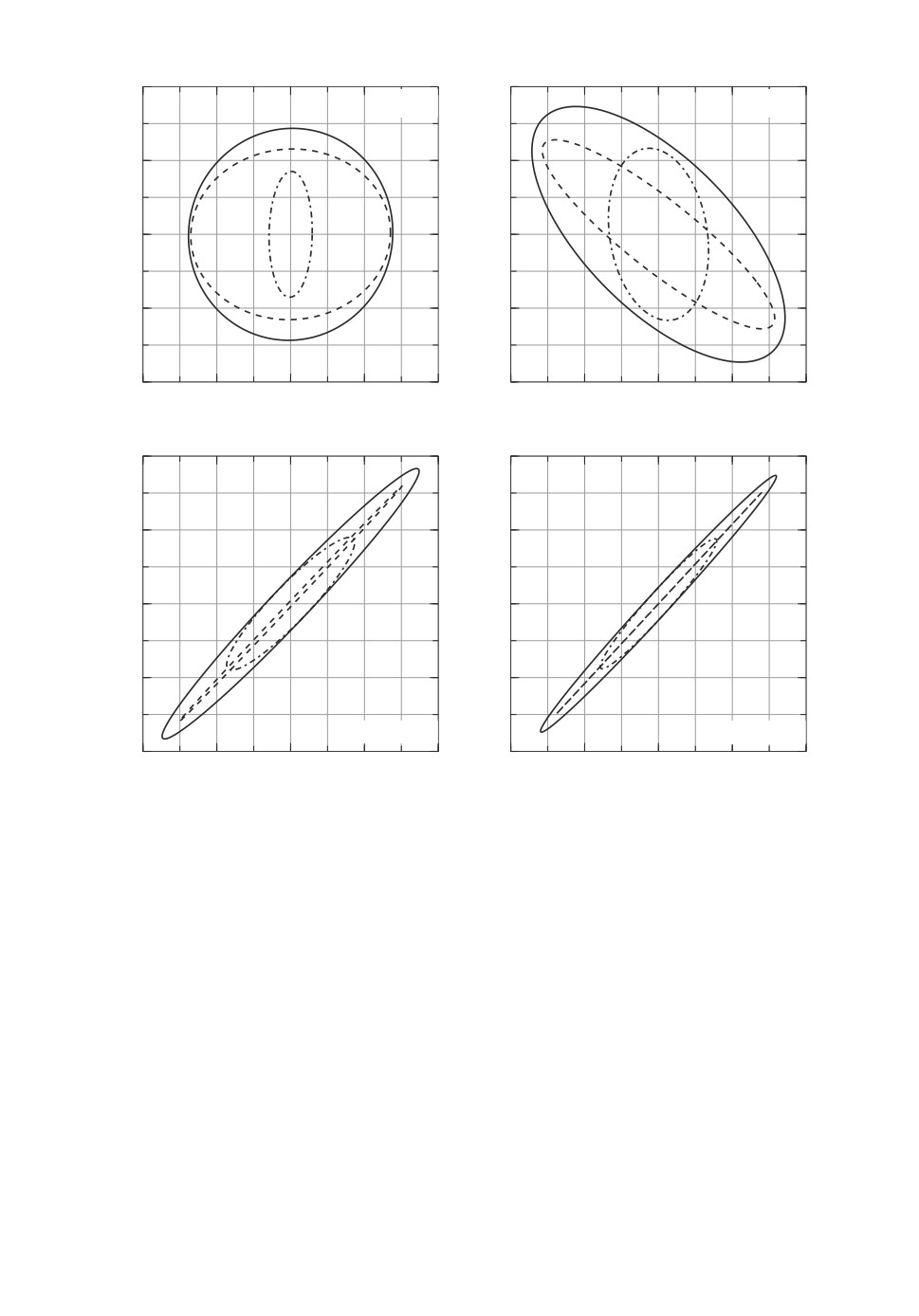
Далее рассмотрим вырожденный случай, когда внешнее возмущение от-
сутствует (G(σ) ≡ 0), а в качестве матрицы R выбрана вырожденная диаго-
нальная матрица R = diag(0, 1). Другими словами, в качестве допустимых
начальных условий полагается x10 = 0, x20 ∈ [-1, 1]. Для этого случая на
рис. 2 показана эволюция во времени величины L, определяющей длину по-
18
L
8
7
6
5
4
3
2
1
0
10
20
30
40
50
60
70
80
t
Рис. 2. Динамика “размера” множества достижимости уравнения Матье в вы-
рожденном случае.
ловины отрезка множества достижимости. Заметим, что эта зависимость
носит колебательный характер с частотой, близкой к 2π.
3. Оптимальное эллипсоидальное оценивание состояния и параметров
Рассмотрим задачу оценивания состояния x(t) линейной нестационарной
системы
∂x(t) = A(t)x(t) + B(t)v(t),
(3.1)
y(t) = C(t)x(t) + D(t)v(t)
с неизвестным начальным состоянием x(t0) по измерениям выхода y(σ),
σ ∈ [t0,t]. Предположим, что начальное состояние системы и возмущения
представимы в виде
x(t0) - x∗ = R1/2w1, v(σ) = G1/2(σ)w2(σ),
(3.2)
|w1|2 + ∥w2∥2[t
≤ 1, t ∈ [t0, tf ]
0,t]
для заданных матрицы RT = R ≥ 0 и матричной функции GT(σ) = G(σ) ≥ 0,
σ ∈ [t0,t]. Построим наблюдатель полного порядка
(3.3)
∂ x(t) = A(t)x(t) + L(t)[y(t) - C(t)x(t)],
x(t0) = x∗,
где x(t) - оценка состояния x(t), а L(t) - матрица параметров наблюдателя,
подлежащая определению. Обозначим ошибку оценивания: e(t) = x(t) - x(t),
которая удовлетворяет уравнению
(3.4)
∂e(t) = Ac(t)e(t) + Bc(t)v(t), e(t0) = x(t0) - x∗,
где Ac(t) = A(t) - L(t)C(t), Bc(t) = B(t) - L(t)D(t). Тогда множество дости-
жимости системы (3.4) в момент времени t согласно теореме 2.1 есть эллип-
19
соид E(P (t)), матрица которого в непрерывном случае удовлетворяет урав-
нению
˙
(3.5)
P
= Ac(t)P + PATc (t) + Bc(t)G(t)BTc
(t)
с начальным условием P (t0) = R, а в дискретном случае - уравнению
(3.6)
P (t + 1) = Ac(t)P (t)ATc(t) + Bc(t)G(t)BTc
(t)
с начальным условием P (t0) = R. Это означает, что состояние x(t) систе-
мы (3.1) находится внутри соответствующего эллипсоида E(P (t), x(t)) с цен-
тром в точке x(t), определяемой уравнением наблюдателя (3.3). Это множе-
ство естественно назвать эллипсоидальной оценкой состояния x(t) в момент
времени t, а наблюдатель с матрицей L∗(t), при которой, например, след мат-
рицы P (t) будет минимальным, назвать оптимальным.
Согласно замечанию 2 динамика матрицы эллипсоидального множества
достижимости уравнения (3.4) описывается тем же уравнением, что и ди-
намика ковариационной матрицы ошибки Ee(t)eT(t) в стохастическом слу-
чае, когда ковариация начального состояния равна Ex(t0)xT(t0) = R, а ко-
вариация возмущения равна Ev(t)vT(t) = G(t). Так как след матрицы эл-
липсоидальной оценки равен дисперсии ошибки оценивания, то уравнение
оптимального наблюдателя совпадает с уравнением фильтра Калмана для
оценки состояния системы (3.1), в которой возмущения ξ1(t) = B(t)v(t) и
ξ2(t) = D(t)v(t), входящие аддитивно в уравнение состояния и в уравнение
измерения, являются коррелированными
(
)
( ξ
)(
)
B(t)G(t)BT(t)
∗
1(t)
(3.7)
E
ξT1(t)ξT2(t)
=
,
ξ2(t)
D(t)G(t)BT(t) D(t)G(t)DT(t)
где ∗ замещает матрицу, транспонированную к симметрично расположенному
блоку. Принимая во внимание стандартное требование в контексте калманов-
ской фильтрации о невырожденности ковариационной матрицы возмущений
в измерениях [28, с. 404], приходим к следующему результату.
Теорема 3.1. Если det[D(σ)G(σ)DT(σ)] = 0, σ ∈ [t0,t], то оптималь-
ный наблюдатель (3.3), обеспечивающий наилучшую эллипсоидальную оцен-
ку E(P∗(t), x(t)) состояния системы (3.1) в момент времени t ≥ t0 при лю-
бых начальных состояниях и возмущениях, удовлетворяющих условию (3.2)
при R ≥ 0 и G(σ) ≥ 0, σ ∈ [t0,t], определяется в непрерывном случае матри-
цей L(t), равной
[
]T [
]-1
(3.8)
L(c)(t) =
D(t)G(t)BT(t) + C(t)P∗(t)
D(t)G(t)DT(t)
,
где матрица P∗(t) ≥ 0 является решением уравнения (3.5) при L(t) = L(c)(t),
а в дискретном случае - матрицей L(t), равной
(3.9)
L(d)
(t) =
[
][
]-1
=
A(t)P∗(t)CT(t) + B(t)G(t)DT(t)
C(t)P∗(t)CT(t) + D(t)G(t)DT(t)
,
где P∗(t) ≥ 0 - решение уравнения (3.6) при L(t) = L(d)(t).
20
Замечание 5. Если z(t) = Cz(t)x(t) ∈ Rnz - некоторый выход системы
(3.1), то оптимальной эллипсоидальной оценкой выхода в момент времени t
является эллипсоид E(Cz(t)P∗(t)CTz(t), z(t)), где z(t) = Cz(t)x(t), а x(t) - оцен-
ка состояния, определяемая оптимальным наблюдателем (3.3).
Замечание 6. Установленное соответствие между оптимальным наблю-
дателем и фильтром Калмана позволяет выявить важное свойство послед-
него. Пусть
x(t) - оценка состояния системы (3.1), определяемая филь-
тром Калмана при заданных ковариационных матрицах начального состоя-
ния Kx(t0) = R и возмущения Kv(t) ≡ G(t), а P∗(t) - ковариация ошибки
этой оценки. Тогда при любых детерминированных начальных состояниях
и возмущениях вида (3.2) состояние системы x(t) принадлежит эллипсоиду
E (P∗(t), x(t)).
Представим теперь задачу оценивания неизвестных параметров линейной
регрессии
(3.10)
χ(t) = Φ(t)ζ0 + v(t), t = t0, . . . , tf ,
где χ(t) - вектор измерений, Φ(t) - матрица регрессоров, ζ0 - вектор неиз-
вестных параметров, v(t) - вектор помех измерений, как задачу оптимального
эллипсоидального оценивания состояния системы
(3.11)
ζ(t + 1) = ζ(t), ζ(t0) = ζ0
по измерениям зашумленного выхода χ(t). Предположим, что неизвестные
параметры и возмущения удовлетворяют ограничению
(3.12)
(ζ0 - ζ∗)TR-1(ζ0 - ζ∗) + ∥v∥2G[t
≤ 1, t ∈ [t0, tf ]
0,t]
при R > 0 и G(t) > 0, где ζ∗ - заданный вектор. Согласно теореме 3.1 оп-
тимальный наблюдатель описывается уравнениями, которые приводятся к
следующему виду:
ζ(t + 1) =ζ(t) + P (t + 1)ΦT(t)G-1(t)[χ(t) - Φ(t)ζ(t)],
ζ(t0) = ζ∗,
(3.13)
P (t +1) = P (t)- P (t)ΦT(t)[Φ(t)P (t)ΦT(t) + G(t)]-1Φ(t)P (t), P (t0) = R.
Нетрудно убедиться в том, что эти уравнения описывают рекуррентный ал-
горитм метода наименьших взвешенных квадратов [29], а также согласно [30,
с. 56], и фильтр Калмана при ковариациях Eζ0ζT0 = R и Ev(t)vT(t) = G(t), а
оценкаζ(t) минимизирует функционал
∑(
)T
(
)
Jt(ζ) = (ζ - ζ∗)TR-1(ζ - ζ∗) +
χ(i) - Φ(i)ζ
G-1(i)
χ(i) - Φ(i)ζ
i=0
Таким образом, в предположениях (3.12) метод наименьших взвешенных
квадратов обеспечивает оптимальную эллипсоидальную оценку неизвестных
параметров, т.е. гарантирует в момент времени t, что неизвестный вектор ζ0
принадлежит эллипсоиду E(P (t),ζ(t)).
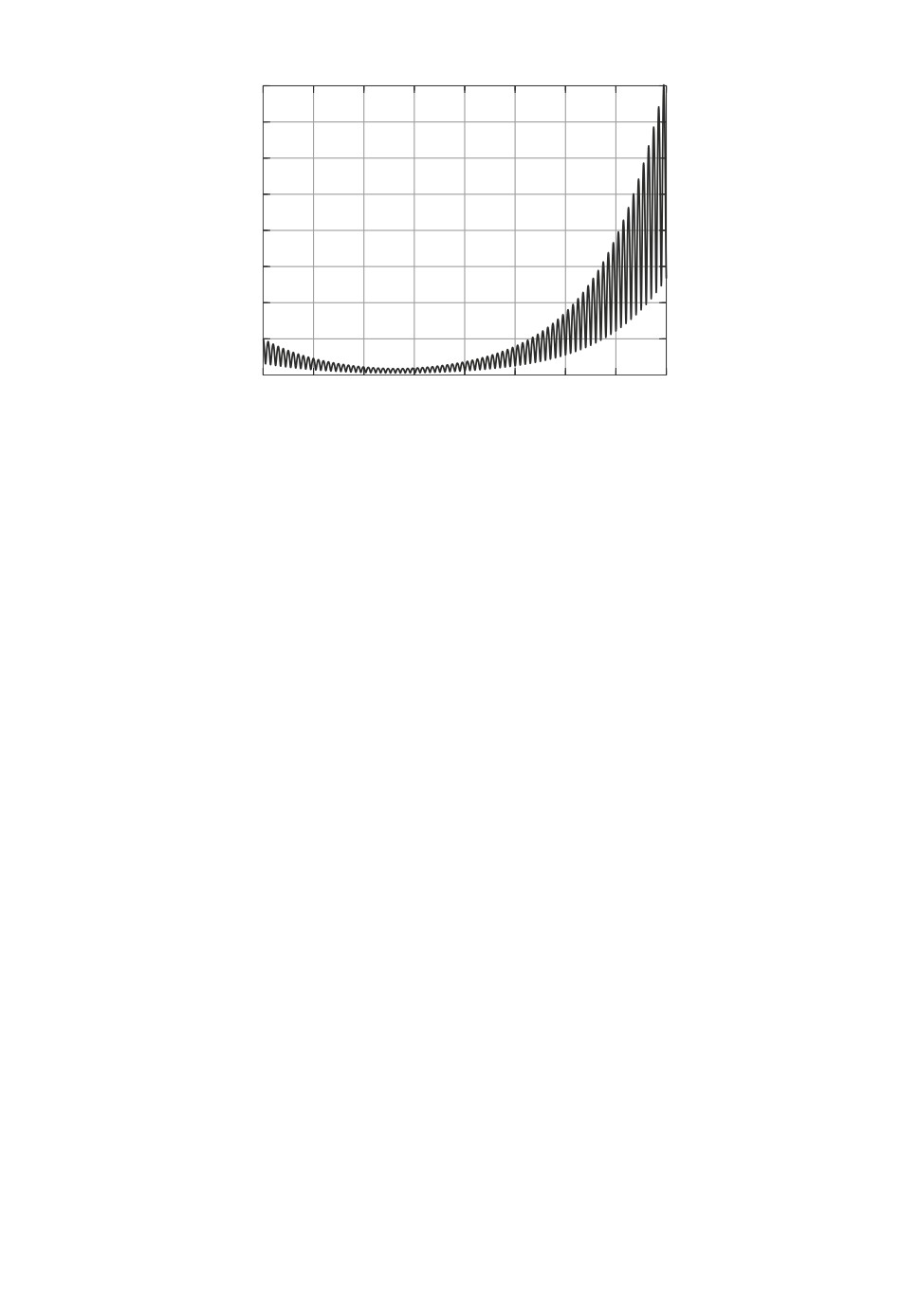
Для иллюстрации утверждения теоремы 3.1 обратимся к уравнению Ма-
тье, представленному в виде системы (2.21). Будем полагать, что измеряемый
21
x2
0,4
0,2
0
-0,2
-0,4
-0,6
-0,8
-0,6
-0,4
-0,2
0,2
0,4
0,6
0,8
0x1
Рис. 3. Динамика оптимальной эллипсоидальной и обобщенной H∞-оптималь-
ной оценок состояния для уравнения Матье.
выход этой системы
y=x1 +x2 +v.
При проведении вычислительных экспериментов будем считать, что ω0 =
= π/6, ω = 2π, ε = 0,1, R = 10,5I, G(σ) ≡ 1. На рис. 3 на плоскости (x1, x2)
представлены траектория системы (сплошная линия) x(t), отвечающая на-
чальным условиям x10 = 0,5, x20 = 0 и возмущению v(t) = 0,05 sin πt, а также
траектория оптимальной оценки x(t) (пунктирная линия) и соответствующие
эллипсы E(P∗(t), x(t)) в моменты времени t1 = 2, t2 = 4, t3 = 6. На этом же
рисунке для сравнения приведена траектория обобщенной H∞-оптимальной
оценки (штрих-пунктирная линия), при которой обобщенная H∞-норма си-
стемы (3.4) [31] является минимальной, а также соответствующие эллипсои-
дальные оценки состояния. Эксперимент показывает, что “размеры” эллипсов
с течением времени заметно уменьшаются и что эллипсы, получаемые в соот-
ветствии с обобщенной H∞-нормой ошибки, “больше” эллипсов, отвечающих
оптимальным эллипсоидальным оценкам.
4. Оптимальные эллипсоидальные управления
Выше было установлено, что состояние линейной системы при неопреде-
ленных начальных условиях и возмущениях, связанных общим ограничени-
ем, в каждый момент времени находится внутри эволюционирующего эллип-
соида. Покажем, что это позволяет синтезировать ограниченное управление
вида нестационарной обратной связи по состоянию u = Θ(t)x, обеспечиваю-
щее выполнение одной из следующий целей: (i) попадание состояния или вы-
22
хода замкнутой системы в заданное эллипсоидальное множество в определен-
ный момент времени, (ii) нахождение в заданной эллипсоидальной трубке в
каждый момент времени. Такие законы управления будем называть эллип-
соидальными.
Уравнение замкнутой системы имеет вид
∂x(t) = [A(t) + Bu(t)Θ(t)]x(t) + B(t)v(t), x(t0) = x0, t ∈ [t0,tf],
(4.1)
z(t) = [Cz(t) + D(t)Θ(t)]x(t),
где z(t) - управляемый выход системы. Предполагается, что допустимые
начальные состояния и возмущения принадлежат множеству S(t, t0; R, G),
вектор управления в любой момент времени должен принадлежать эл-
липсоиду u(t) ∈ E(Qu(t)) с Qu(t) > 0, а целевое множество есть эллипсоид
Ez(Q(t)) = {z : zTQ-1(t)z ≤ 1} с Q(t) > 0.
Далее потребуется вспомогательное утверждение, доказательство которо-
го приведено в Приложении.
Лемма 4.1. Для заданной матрицы Θ(t) имеет место u(t) = Θ(t)x(t) ∈
∈ E(Qu(t)) с Qu(t) > 0 при всех x(t) ∈ E(P(t)) с P(t) ≥ 0 тогда и только то-
гда, когда линейное матричное неравенство
(
)
P (t)
∗
(4.2)
≥0
Θ(t)P (t) Qu(t)
разрешимо относительно P (t).
Согласно теореме 2.1 состояние замкнутой системы (4.1) в непрерывном
случае в каждый момент времени находится внутри эллипсоида E(P (t)), мат-
рица которого удовлетворяет уравнению
˙
(4.3)
P
= A(t)P + P AT(t) + Bu(t)Z(t) + ZT(t)BTu (t) + B(t)G(t)BT
(t)
с начальным условием P (t0) = R, в котором Z(t) = Θ(t)P (t). Тогда при
всех допустимых начальных условиях и возмущениях целевой выход за-
мкнутой системы будет находиться внутри эллипсоида Ez(Qz(t)), где
Qz(t) = [C(t) + D(t)Θ(t)]P(t)[C(t) + D(t)Θ(t)]T, и будет содержаться внутри
целевого множества, если Ez(Qz(t)) ⊆ E(Q(t)), т.е. Qz(t) ≤ Q(t). Подставляя
в это неравенство выражение для Qz(t) и применяя лемму Шура, а также
учитывая лемму 4.1, приходим к следующему результату.
Теорема 4.1. Закон управления u = Θ(t)x с параметрами Θ(t) =
= Z(t)P-1(t) удовлетворяет ограничению u(t) ∈ E(Qu(t)), Qu(t) > 0,
∀t ∈ [t0,tf] и обеспечивает выполнение z(tf) ∈ Ez(Q(tf)) для цели (i)
(z(t) ∈ Ez(Q(t)), ∀ t ∈ [t0, tf ] для цели (ii)) при всех начальных состояниях и
возмущениях, принадлежащих множеству S(t, t0; R, G), если существуют
матричные функции P (t) > 0 и Z(t), удовлетворяющие матричному диф-
ференциальному уравнению (4.3), неравенствам (4.2) и Qz(tf ) ≤ Q(tf ) для
цели (i) (Qz(t) ≤ Q(t), ∀ t ∈ [t0, tf ] для цели (ii)).
Для вычисления искомых параметров обратной связи проведем дискрети-
зацию указанной задачи. Введем на отрезке [t0, tf ] равномерную сетку tk =
= tk-1 + h, k = 1,...,N, где h = (tf - t0)/N, и запишем дискретный аналог
23
рассматриваемой задачи в виде следующих соотношений при k = 0, . . . , N :
(
)
Y (k + 1) - Y (k) - h
A(k)Y (k) + Y (k)AT(k)
-
(
)
−h
Bu(k)Z(k) + ZT(k)BTu (k) + B(k)G(k)BT(k)
= 0, k = N,
(
)
Y (k)
∗
≥ 0, Y (k) > 0, Y (0) = R,
Z(k) Qu(k)
(4.4)
(
)
Y (N)
∗
(i) :
≥ 0,
C(N)Y (N) + D(N)Z(N) Q(N)
(
)
Y (k)
∗
(ii) :
≥ 0,
C(k)Y (k) + D(k)Z(k) Q(k)
где аргумент k указывает на значение соответствующей переменной в момент
времени tk. Решив эту задачу полуопределенного программирования относи-
тельно неизвестных Y (k), Z(k), найдем матрицы Θ(k) = Z(k)Y-1(k).
В теореме 4.1 и в процедуре (4.4) вычисления параметров регулятора
сделаны дополнительные предположения о положительной определенности
матриц P (t) > 0 и Y (k) > 0, которые обеспечивают возможность вычисления
параметров регулятора. Заметим, что имеются различные возможности для
оптимизации в рассматриваемой задаче. В частности, можно искать опти-
мальное эллипсоидальное управление, обеспечивающее попадание в целевой
эллипсоид, матрица которого имеет минимальный след. В таком случае мат-
рица Q(N) становится переменной и решается задача min tr Q(N) при огра-
ничениях, определенных в (4.4).
В дискретном случае имеет место следующий результат.
Теорема 4.2. Закон управления u(t) = Θ(t)x(t) с параметрами Θ(t) =
= Z(t)Y -1(t) удовлетворяет ограничению u(t) ∈ E(Qu(t)), Qu(t) > 0,
∀t ∈ [t0,tf] и обеспечивает выполнение ztf ∈ Ez(Q(tf)) для цели (i)
(zt ∈ Ez(Q(t)), ∀ t ∈ [t0, tf ] для цели (ii)) при всех начальных состояниях и
возмущениях, принадлежащих множеству S(t, t0; R, G), если разрешимы
линейные матричные неравенства при t = t0, . . . , tf :
Y (t)
∗
∗
A(t)Y(t)+Bu(t)Z(t) Y (t + 1)
∗
≥0,t=tf,
0
BT(t) G-1(t)
)
( Y (t)
∗
≥ 0, Y (t0) ≥ R,
Z(t) Qu(t)
(4.5)
(
)
Y (tf )
∗
(i) :
≥ 0,
C(tf )Y (tf ) + D(tf )Z(tf ) Q(tf )
(
)
Y (t)
∗
(ii) :
≥0
C(t)Y (t) + D(t)Z(t) Q(t)
относительно неизвестных матриц Y (t) > 0, Z(t).
Доказательство теоремы 4.2 приведено в Приложении.
24
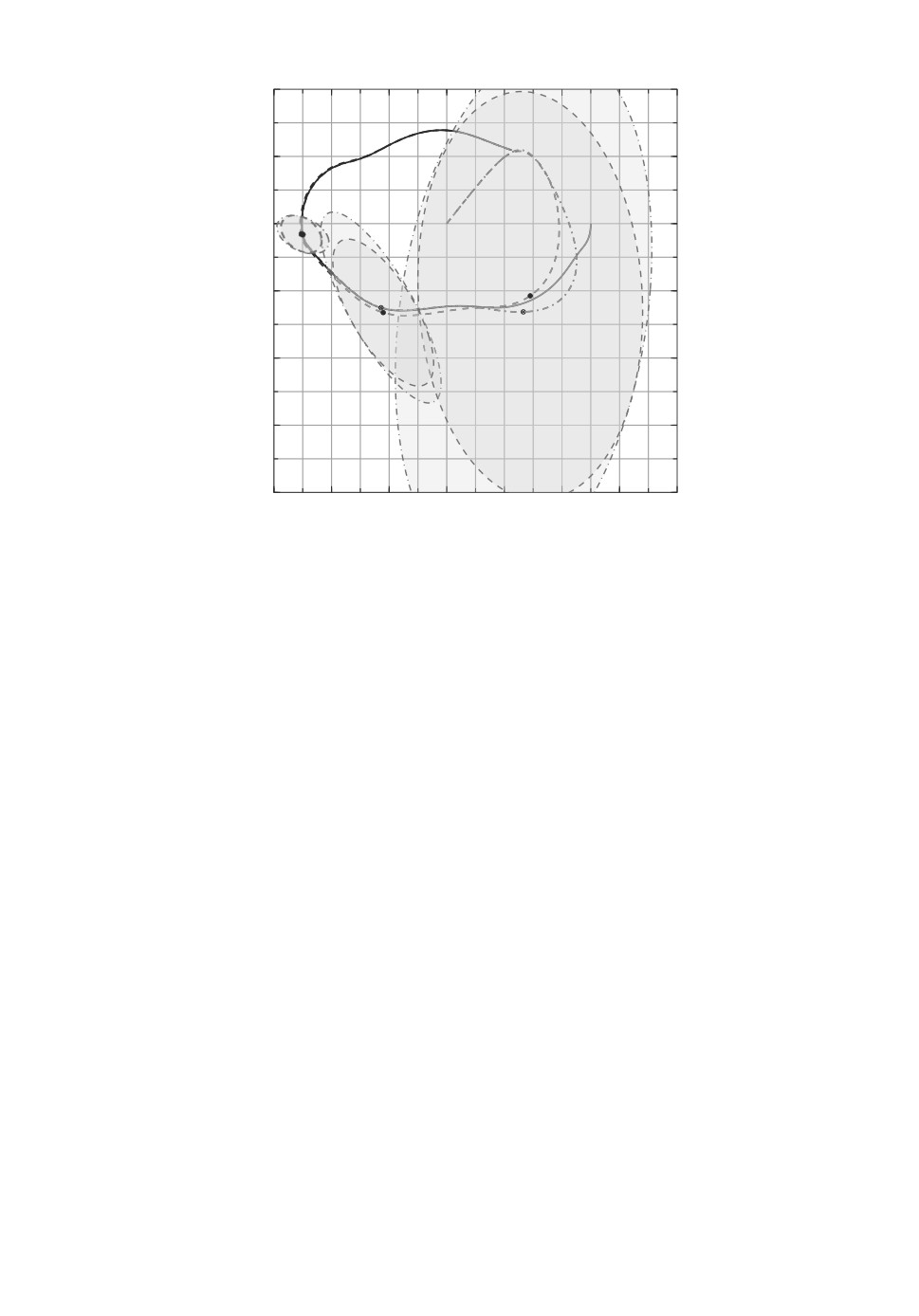
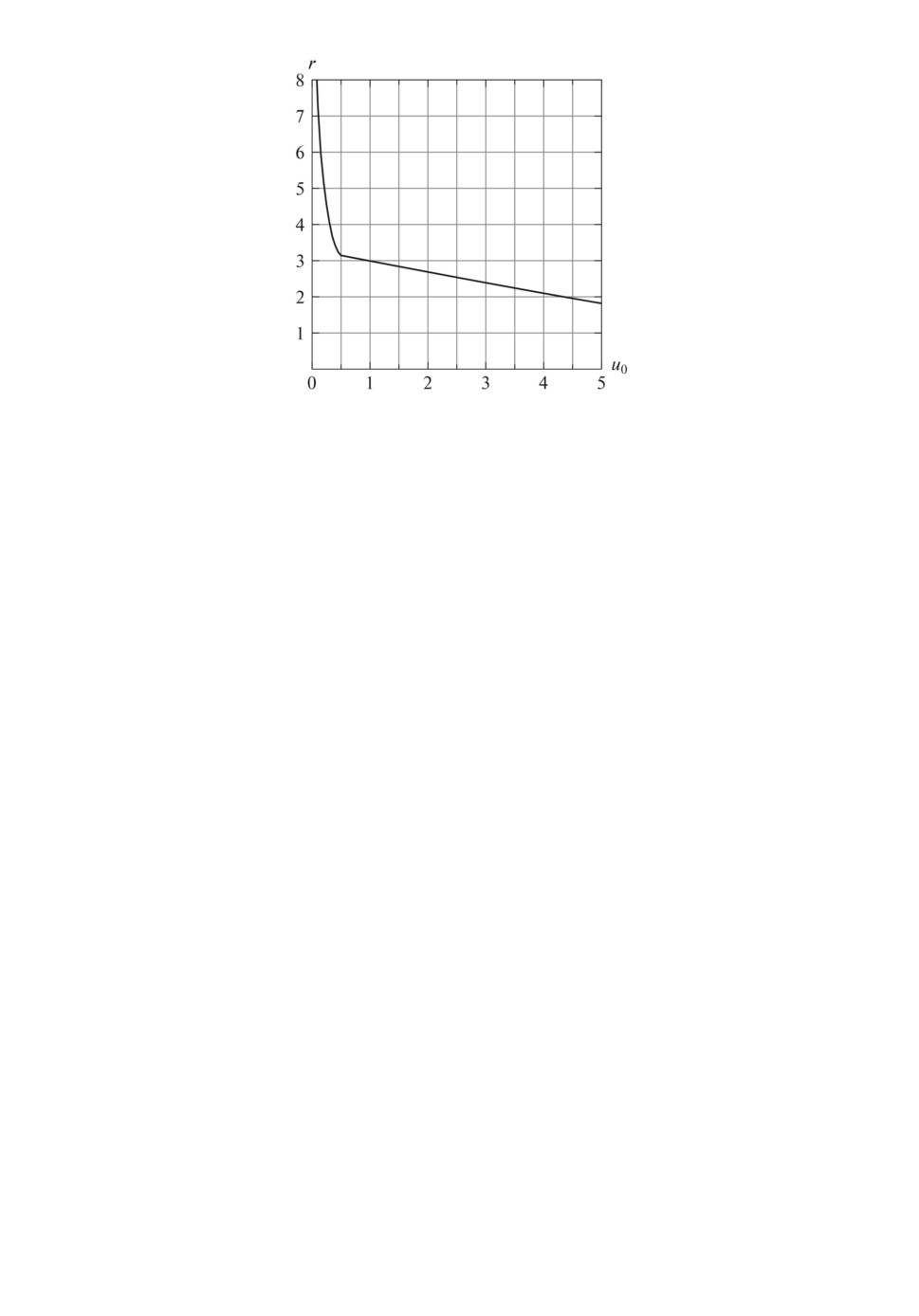
Рис. 4. Зависимость минимального радиуса трубки от максимальной величи-
ны управления.
Для иллюстрации приведенных в данном разделе результатов обратимся
к системе
x1 = x2,
(4.6)
x2 = -ω20(1 + εsin ωt)x1 + u + v,
x1(0) = x10, x2(0) = x20,
описывающей параметрические колебания управляемого линейного осцилля-
тора. Зададим параметры осциллятора точно такие же, как и разделе 2, т.е.
ω0 = π, ω = 2π, ε = 0,1. Рассмотрим задачу синтеза нестационарного управ-
ления по состоянию в виде u = θ1(t)x1 + θ2(t)x2 при заданном ограниче-
нии |u| ≤ u0, обеспечивающего на конечном отрезке времени [0, 60] удержа-
ние траекторий системы (4.6) при неопределенных начальных условиях и
возмущениях, связанных общим ограничением c матрицей R = diag(1, 1) и
G(σ) ≡ 1, в круглой трубке x21(t) + x22(t) ≤ r2, t ∈ [0, 60] с минимально воз-
можным радиусом r. На рис. 4 показана зависимость минимального радиуса
трубки от параметра u0.
5. Заключение
Показано, что при наличии совместного ограничения на неточно задан-
ные начальное состояние и возмущение множествами достижимости линей-
ной нестационарной непрерывной или дискретной системы являются эволю-
ционирующие эллипсоиды, матрицы которых удовлетворяют линейному мат-
ричному дифференциальному или разностному уравнению. Применение это-
го результата позволяет синтезировать оптимальный наблюдатель неизме-
ряемого состояния системы, обеспечивающий эллипсоидальную оценку с ми-
нимальным следом матрицы эллипсоида, а также линейные нестационарные
регуляторы для приведения состояния системы в заданное эллипсоидальное
множество. Доказано, что фильтр Калмана в задаче оценивания состояния и
рекуррентный алгоритм метода наименьших взвешенных квадратов в задаче
идентификации неизвестных параметров обеспечивают оптимальные эллип-
25
соидальные оценки состояния и параметров при детерминированных началь-
ном состоянии системы и возмущении с заданной мерой неопределенности.
Тем самым устанавливается связь между стохастическим и детерминирован-
ным подходами к задачам фильтрации и идентификации. Иллюстративные
примеры для уравнения Матье демонстрируют эффективность предложен-
ного подхода.
Авторы признательны А.И. Матасову за полезные обсуждения и конструк-
тивные предложения по доказательству теоремы 2.1.
ПРИЛОЖЕНИЕ
Доказательство леммы 2.1. В соответствии с полярным разложе-
нием [32, с. 490] представим матрицу S в виде S = (SST)1/2U, где UUT = I.
Тогда x = Sg = (SST)1/2Ug = (SST)1/2w, где w = Ug. Так как wTw ≤ 1 и для
каждого такого w найдется g = UTw такой, что gTg = wTw ≤ 1, то лемма до-
казана.
Доказательство леммы 4.1. Запишем эквивалентные условия
u ∈ E(Qu)
∀x ∈ E(P) ⇔ maxxTΘTQ-1uΘx ≤ 1, x = P1/2w
∀w : wTw ≤ 1.
Вводя функцию Лагранжа
(
)
L = wTP1/2ΘTQ-1uΘP1/2w + µ
1-wTw
,
приходим к условию
(
)
(
)
µ=λmax P1/2ΘTQ-1u
ΘP1/2
= λmax Q-1/2uΘPΘTQ-1/2
u
≤ 1,
которое эквивалентно неравенству ΘP ΘT ≤ Qu. Согласно характеризации
псевдообратной матрицы представим P = P P+P и запишем последнее нера-
венство как ΘP P+P ΘT ≤ Qu. С учетом варианта леммы Шура для вырож-
денных матриц, доказанного в [29, с. 190], приходим к (4.2). Лемма доказана.
Доказательство теоремы
4.2. Замкнутая система описывается
уравнением
x(t + 1) = Ac(t)x(t) + B(t)v(t), Ac(t) = A(t) + Bu(t)Θ(t).
Множества достижимости этой системы - эллипсоиды E(Pc(t)) с матри-
цами Pc(t), определяемыми согласно теореме 2.1. Введем матрицы Y (t) =
= Y T(t) > 0, t = t0,··· ,tf, удовлетворяющие неравенствам
(Π.1)
Y (t + 1) ≥ Ac(t)Y (t)ATc (t) + B(t)G(t)BT(t), Y (t0
)≥R.
Если обозначить Θ(t)Y (t) = Z(t) и применить лемму Шура, то это неравен-
ство превратится в первое неравенство в (4.5). Из (Π.1) следует, что соотно-
шения
Y (t + 1) - Pc(t + 1) = Ac(t)[Y (t) - Pc(t)]ATc (t) + M(t), Y (t0) - Pc(t0) ≥ 0
выполняются при некоторых матрицах M(t) = MT(t) ≥ 0. Тогда
∑
Y (t) - Pc(t) = Φ(t, t0)[Y (t0) - Pc(t0)]ΦT(t, t0) +
Φ(i, t0)M(i)ΦT(i, t0) ≥ 0,
i=t0
26
где Φ(t, t0)
- переходная матрица замкнутой системы. Следовательно,
Pc(t) ≤ Y (t) и E(Pc(t)) ⊆ E(Y (t)), т.е. состояние замкнутой системы находит-
ся внутри эллипсоида E(Y (t)), а значит, целевой выход находится внутри эл-
липсоида Ez(Qz(t)), где Qz(t) = [C(t) + D(t)Θ(t)]Y (t)[C(t) + D(t)Θ(t)]T. То-
гда выполнение неравенства Qz(t) ≤ Q(t), которое при Z(t) = Θ(t)Y (t) с по-
мощью леммы Шура приводится к третьему и четвертому неравенствам в
(4.5), обеспечит выполнение соответствующей цели управления. Второе нера-
венство в (4.5) согласно лемме 4.1 означает, что u(t) ∈ E(Qu(t)). Таким обра-
зом, если неравенства (4.5) выполняются, то управление обеспечивает выпол-
нение цели. Теорема доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Неймарк Ю.И. Математическое моделирование как наука и искусство. Нижний
Новгород: Изд-во Нижегород. уни-та, 2010.
2.
Neimark Ju.I. Mathematical Models in Natural Science and Engineering. Verlag
Berlin Heidelberg: Springer, 2003.
3.
Неймарк Ю.И. Динамические системы и управляемые процессы. М.: Наука,
1978.
4.
Неймарк Ю.И. Робастная устойчивость и D-разбиение // АиТ. 1992. № 7.
С. 10-18.
Neimark Ju.I. Robust stability and D-partition // Autom. Remote Control. 1992.
V. 53. No. 7. P. 957-965.
5.
Неймарк Ю.И. Робастная устойчивость по нелинейным параметрам // Диффе-
ренц. уравнения. 1992. № 12. С. 2185-2187.
Neimark Ju.I. Robust stability under nonlinear parameters // Differen. Equat. 1992.
V. 28. No. 12. P. 1829-1831.
6.
Коган М.М., Неймарк Ю.И. Об оптимальности локально-оптимальных реше-
ний линейно-квадратичных задач управления и фильтрации // АиТ. 1992. № 4.
С. 101-110.
Kogan M.M., Neimark Ju.I. On Optimality of Locally-Optimal Solutions to Linear-
Quadratic Control and Filtering Problems // Autom. Remote Control. 1992. V. 53.
No. 4. P. 561-569.
7.
Kogan M.M., Neimark Ju.I. Locally optimal adaptive control without persistent
excitation // Automatica. 1996. V. 32. No. 10. P. 1463-1467.
8.
Булгаков Б.В. О накоплении возмущений в линейных колебательных системах
с постоянными параметрами // ДАН СССР. 1946. Т. 51. № 5. С. 339-342.
9.
Schweppe F.C. Recursive State Estimation: Unknown but Bounded Errors and Sys-
tem Inputs // IEEE Trans. Autom. Control. 1968. V. 13. No. 1. P. 22-28.
10.
Bertsekas D.P., Rhodes I.P. On the Minimax Reachability of Target Sets and Target
Tubes // Automatica. 1971. V. 7. P. 233-247.
11.
Куржанский А.Б. Управление и наблюдение в условиях неопределенности. М.:
Наука, 1977.
12.
Черноусько Ф.Л. Оценивание фазового состояния динамических систем. М.:
Наука, 1988.
13.
Kurzhanski A.B., Valyi I. Ellipsoidal Calculus for Estimation and Control. Boston:
Birkhäuser, 1997.
14.
Kurzhanskiy A.A., Varaiya P. Reach Set Computation and Control Synthesis for
Discrete-Time Dynamical Systems with Disturbances // Automatica. 2011. V. 47.
P. 1414-1426.
27
15.
Kuntsevich V.M., Volosov V.V. Ellipsoidal and Interval Estimation of State Vectors
for Families of Linear and Nonlinear Discrete-Time Dynamic Systems // Cybernet.
Syst. Anal. 2015. V. 51. No. 1. P. 64-72.
16.
Filippova T.F. Ellipsoidal Estimates of Reachable Sets for Control Systems with
Nonlinear Terms // IFAC PapersOnLine. 2017. V. 50. No. 1. P. 15355-15360.
17.
Boyd S., El Ghaoui L., Feron E., Balakrishnan V. Linear Matrix Inequalities in
Systems and Control Theory. Philadelphia: SIAM, 1994.
18.
Chernousko F.L., Ovseevich A.I. Properties of the Optimal Ellipsoids Approximating
the Reachable Sets of Uncertain Systems// J. Optim. Theory Appl. 2004. V. 120.
No. 2. P. 223-246.
19.
Wang Z., Shen X., Zhu Y. On Equivalence of Major Relaxation Methods for Min-
imum Ellipsoid Covering Intersection of Ellipsoids // Automatica. 2019. V. 103.
P. 337-345.
20.
Баландин Д.В., Бирюков Р.С., Коган М.М. Оптимальное управление макси-
мальными уклонениями выходов линейной нестационарной системы на конеч-
ном интервале времени // АиТ. 2019. № 10. C. 37-61.
Balandin D.V., Biryukov R.S., Kogan M.M. Optimal Control of Maximum Output
Deviations of a Linear Time-Varying System on a Finite Horizon // Autom. Remote
Control. 2019. V. 80. No. 10. P. 1783-1802.
21.
Баландин Д.В., Бирюков Р.С., Коган М.М. Минимаксное управление уклонени-
ями выходов линейной дискретной нестационарной системы // АиТ. 2019. № 12.
С. 3-24.
Balandin D.V., Biryukov R.S., Kogan M.M. Minimax Control of Deviations for the
Outputs of a Linear Discrete Time-Varying System // Autom. Remote Control. 2019.
V. 80. No. 12. P. 345-359.
22.
Balandin D.V., Kogan M.M. Multi-Objective Generalized H2 Control // Automat-
ica. 2019. V. 99. No. 1. P. 317-322.
23.
Balandin D.V., Biryukov R.S., Kogan M.M. Finite-Horizon Multi-Objective Gener-
alized H2 Control with Transients // Automatica. 2019. V. 106. No. 8. P. 27-34.
24.
Wilson D.A. Convolution and Hankel Operator Norms for Linear Systems //IEEE
Trans. Autom. Control. 1989. V. 34. P. 94-97.
25.
Баландин Д.В., Бирюков Р.С., Коган М.М. Эллипсоидальные множества до-
стижимости линейных нестационарных систем в задачах управления и оцени-
вания // Дифференц. уравнения. 2019. Т. 55. № 11. С. 1485-1498.
26.
Boyd S., Vandenberghe L. Convex Optimization. Cambridge Univ. Press, 2004.
27.
Балакришнан А.В. Прикладной функциональный анализ. М.: Наука, 1980.
28.
Квакернаак Х., Сиван Р. Линейные оптимальные системы управления. М.: Мир,
1977.
29.
Алберт А. Регрессия, псевдоинверсия и рекуррентное оценивание. М.: Наука,
1977.
30.
Kailath T., Sayed A.N., Hassibi B. Linear Estimatiom. Upper Saddle River, New
Jersey: Prentice Hall, Inc., 2000.
31.
Nagpal K.M., Khargonekar P.P. Filtering and Smoothing in an H∞ Setting // IEEE
Trans. Autom. Control. 1991. V. 36. No. 2. P. 152-166.
32.
Хорн Р., Джонсон Ч. Матричный анализ. М.: Мир, 1989.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 03.10.2019
Принята к публикации 30.01.2020
28