Автоматика и телемеханика, № 8, 2020
© 2020 г. В.Н. БЕЛЫХ, д-р физ.-мат. наук (belykh@unn.ru),
Н.В. БАРАБАШ (barabash@itmm.unn.ru)
(Волжский государственный университет водного транспорта, Нижний Новгород;
Нижегородский государственный университет им. Н.И. Лобачевского),
И.В. БЕЛЫХ, канд. физ.-мат. наук (ibelykh@gsu.edu)
(Государственный университет Джорджии, Атланта, США)
БИФУРКАЦИИ ХАОТИЧЕСКИХ АТТРАКТОРОВ
В КУСОЧНО-ГЛАДКОЙ СИСТЕМЕ ЛОРЕНЦЕВСКОГО ТИПА1
Изучается динамика кусочно-гладкой системы дифференциальных
уравнений, для которой ранее было строго доказано существование стран-
ного аттрактора лоренцевского типа и получены бифуркационные меха-
низмы его рождения. В настоящей статье обсуждается вопрос о разру-
шении этого аттрактора за счет появления в его структуре скользящих
движений. Качественно-численными методами изучается сложная после-
довательность бифуркаций аттрактора, в результате которой в системе
остается глобально устойчивый предельный цикл. Показано, что основой
этой последовательности являются C-бифуркации и бифуркации много-
обходных гомоклинических траекторий.
Ключевые слова: динамическая система, бифуркации, предельный цикл,
скользящие движения, странный аттрактор, хаос.
DOI: 10.31857/S0005231020080036
1. Введение
Настоящая статья выполнена в русле одного из главных научных направ-
лений Ю.И. Неймарка бифуркационной теории динамических систем. Ши-
роко известный метод D-разбиений можно рассматривать как один из пер-
вых результатов Ю.И. Неймарка по теории бифуркаций корней характерис-
тических уравнений линеаризованных динамических систем. Другой значи-
мый результат это бифуркация рождения тора или сложного неблуждаю-
щего множества из периодического движения при смене его устойчивости.
Это хорошо известная специалистам бифуркация Неймарка-Сакера [1]. Тео-
рия кусочно-гладких (релейных) систем, начатая Ю.И. Неймарком в 50-60 гг.
XX в. [2, 3], продолжает успешно развиваться в настоящее время [4, 5]. На-
стоящую статью можно рассматривать как развитие теории бифуркаций в
кусочно-гладких динамических системах.
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проекты № 18-01-00556 и №18-31-20052), а также Национального научно-
го фонда США (проект DMS-1909924). Численные результаты получены при поддержке
Российского научного фонда (проект №19-12-00367).
29
Кусочно-линейные и кусочно-гладкие системы широко использовались в
теории динамических систем в различных контекстах и приложениях [4, 6-8].
Их потенциальное преимущество перед их нелинейными аналогами заключа-
ется в возможности получать явные решения в заданных областях фазового
пространства системы и “склеивать” решения на границах этих областей.
Широкий класс кусочно-гладких динамических систем [4-6] в настоящее
время широко используется в технике в качестве релейных, автоматических
систем управления и систем с переключениями [9-12].
Интересным примером такой кусочно-гладкой системы является биомеха-
ническая модель баланса пешехода, идущего по мосту [13], в которой пере-
ключения между двумя системами [14] соответствуют переносу веса пеше-
хода с одной ноги на другую. Траектория такой кусочно-гладкой системы
определяется двумя склеенными решениями интегрируемых подсистем, что
позволяет получить точные формы периодического движения пешехода [15].
Кусочно-гладкие динамические системы могут использоваться для
построения потоков, обладающих основными свойствами хаотических нели-
нейных систем и допускающих строгое аналитическое исследование. В недав-
ней статье [16] авторами был предложен новый подход построения кусочно-
гладких моделей, заменяющих нелинейные неинтегрируемые хаотические си-
стемы. Эти модели имеют качественно ту же бифуркационную структуру и
позволяют аналитически доказывать существование странных аттракторов
и их бифуркаций.
Этот подход был применен к известной системе Лоренца [17], вместо ко-
торой была построена кусочно-линейная система как ее простейший аналог.
Для этой системы авторам удалось провести строгое доказательство суще-
ствования сингулярно-гиперболического аттрактора и бифуркаций его рож-
дения. Полученные бифуркации и аттракторы качественно совпадают с би-
фуркационной картиной и структурой аттрактора самой системы Лоренца,
детально изученными качественно-численными методами [18-20]. Из числен-
ных результатов известно, что аттрактор Лоренца разрушается при потере
инвариантного слоения [19, 21] с последующими сложными бифуркациями.
В силу сложности сценарий разрушения аттрактора Лоренца теоретически
изучен слабо.
В настоящей статье рассматривается этот вопрос, т.е. бифуркационная
картина гибели сингулярно-гиперболического аттрактора, но не в системе
Лоренца, а в ее аналоге в модели из [16]. Это разрушение начинается с
разрушения инвариантного слоения и после бесконечной последовательности
бифуркаций заканчивается рождением единственного устойчивого предель-
ного цикла.
Статья устроена следующим образом. В разделе 2 дано описание пред-
ложенной кусочно-линейной модели, в разделе 3 приведена характеристи-
ка скользящих движений, в разделе 4 представлен основной результат [16],
в разделе 5 приведен качественно-численный анализ разрушения странного
аттрактора.
30
2. Описание модели
Рассматривается кусочно-линейная система, склеенная из трехмерных ли-
нейных подсистем As, Al, и Ar
x = x,
As :
y = -αy,
(x, y, z) ∈ Gs,
Ż = -νz,
x = -λ(x + 1) + ω(z - b),
(1)
Al :
y = -δ(y + 1),
(x, y, z) ∈ Gl,
Ż = -ω(x + 1) - λ(z - b),
x = -λ(x - 1) - ω(z - b),
Ar :
y = -δ(y - 1),
(x, y, z) ∈ Gr,
Ż = ω(x - 1) - λ(z - b),
где α, δ, ν, ω, λ и b положительные параметры. Эти подсистемы определены
на следующем разбиении фазового пространства Gs, Gl, и Gr соответственно:
Gs : |x| < 1, y ∈ R1, z < b,
x ≤ -1
при z ≤ b,
Gl :
x ≤ -1
при z > b и y ≥ 0,
(2)
x < 1 при z > b и y < 0,
x≥1
при z ≤ b,
Gr :
x≥1
при z > b и y < 0,
x > -1 при z > b и y ≥ 0.
Векторные поля подсистем As, Al и Ar будем обозначать соответствен-
X
но Fs, Fl и Fr в виде системы
= Fi(X), где индекс i = (s,l,r) и вектор
X = (x,y,z).
Эта система моделирует известную систему Лоренца [17]. Она, как и систе-
ма Лоренца, имеет три состояния равновесия и инвариантность относительно
замены (x, y, z) → (-x, -y, z).
Линейная подсистема As управляет динамикой системы (1) в области Gs.
Эта система имеет седловое состояние равновесия Os в начале координат,
поэтому будем называть Gs седловой областью. Подсистемы Ar,l определе-
ны в областях Gr,l и имеют симметричные равновесия er,l = {±1, ±1, b} со-
ответственно. Эти равновесия являются устойчивыми трехмерными фокуса-
ми в подсистемах Ar,l. В полной системе эти равновесия становятся склеен-
ными и поэтому могут менять устойчивость. Заметим, что линии склейки
wl = {x = -1,z = b,y ∈ R1} и wr = {x = 1,z = b,y ∈ R1} являются устойчи-
выми многообразиями фокусов el и er соответственно (см. рис. 1). Будем
называть Gr и Gl правой и левой фокусными областями.
Седловая область Gs ограничена справа и слева вертикальными полу-
плоскостями S1 = {x = 1, y ∈ R1, z < b} и S2 = {x = -1, y ∈ R1, z < b} (см.
31
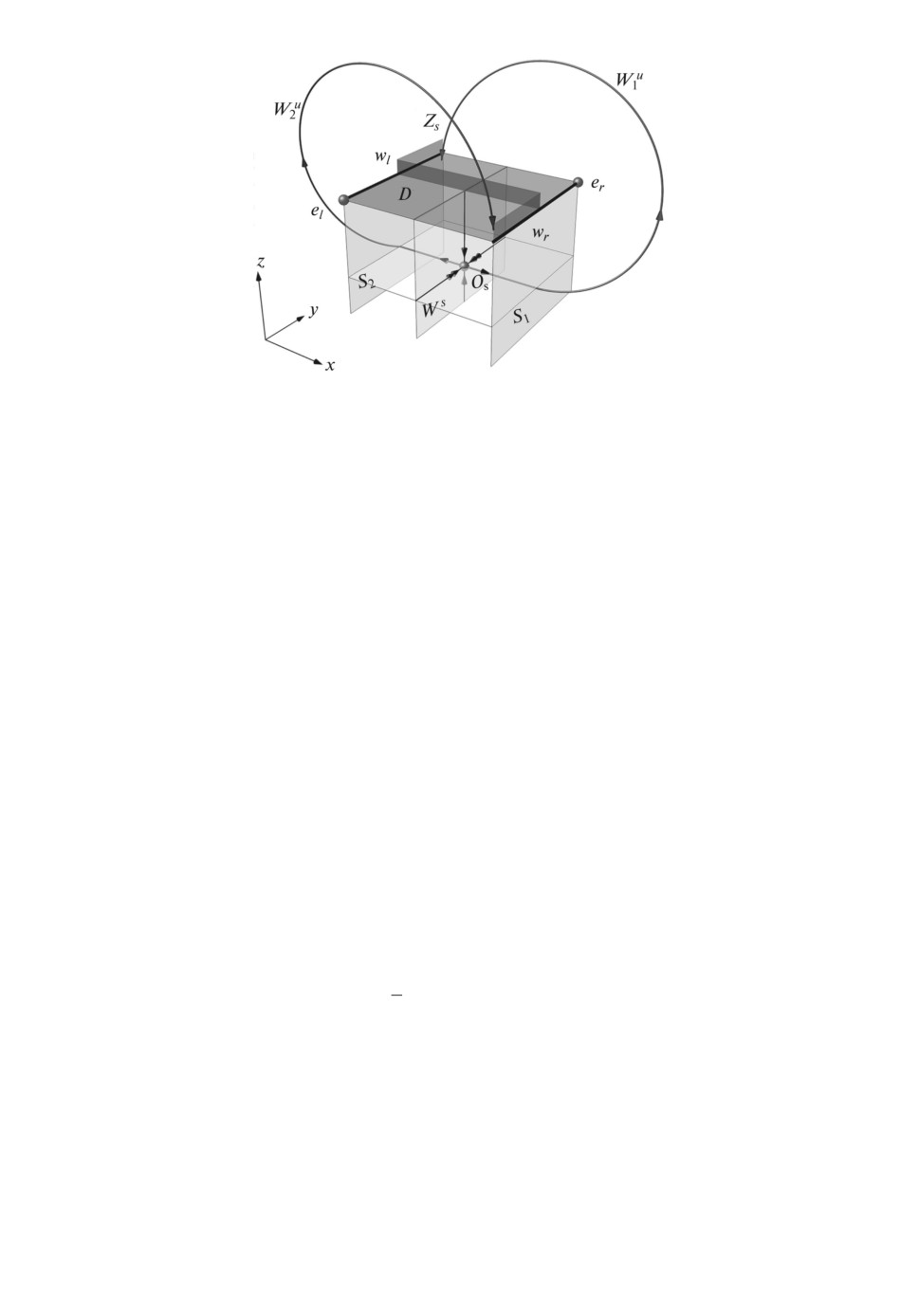
Рис. 1. Схема построения кусочно-линейной системы (1). Фазовое простран-
ство разделено на три области: Gs, Gl и Gr (не указаны на рисунке). Седловая
область Gs образована вертикальными полуплоскостями S1,2 и горизонталь-
ной поверхностью D. Фокусные области Gl и Gr разделены седловой областью
и вертикальной Z-образной границей Zs. Седло Os имеет двумерное устойчи-
вое многообразие Ws и одномерное неустойчивое многообразие (Wu1 и Wu2 его
правая и левая ветви соответственно). Отрезки wl и wr принадлежат одно-
мерным устойчивым многообразиям фокусов el и er соответственно.
рис. 1). Область Gs также ограничена сверху частью плоскости D = {|x| ≤ 1,
y ∈ R1, z = b} (темно-серая горизонтальная плоскость на рис. 1). Ниже плос-
кости D фокусные области Gl и Gr расположены слева и справа от вертикаль-
ных полуплоскостей S2 и S1 соответственно. Выше плоскости D фокусные
области разделены Z-образной границей Zs (см. рис. 1).
Седло Os имеет двумерное устойчивое многообразие, определенное в
седловой области как Wssaddle = {x = 0, y ∈ R1, z < b} (центральная верти-
кальная плоскость на рис. 1) и одномерное неустойчивое многообразие,
определенное в седловой области как Wu1saddle = {0 < x < 1, y = z = 0} и
Wu2saddle = {-1 < x < 0, y = z = 0}. Эти многообразия и их продолжения по
траекториям систем Ar,l в фокусных областях образуют глобальные много-
образия седла Ws, Wu1 и Wu2 седла Os в полном фазовом пространстве систе-
мы (1).
Предполагается, что выполняется условие
1
(3)
< ν < 1 < α.
2
Часть неравенства (3) ν < 1 означает, что седловая величина равновесия Os
положительна. В силу неравенства 1 < α плоскость Wlead = ((x,z) ∈ Gs,
y = 0) является частью ведущего многообразия, что аналогично системе Ло-
ренца.
3. Скользящие движения
Система (1) диссипативна, т.е. в ее фазовом пространстве существует по-
глощающая область G такая, что любая траектория с начальной точкой в
32
области R3 \ G попадает в область G и остается в ней навсегда. Эта область
задана неравенствами [16]
|y| ≤ 1,
0 ≤ z ≤ 2b при
|x| ≤ 1,
(4)
G=
Vl ≤ b2
при x < -1,
Vr ≤ b2
при x > 1,
где Vl,r = (x ± 1)2 + (z - b)2. Очевидно, что в этой области находятся все тра-
ектории системы (1). Система (1) имеет две поверхности устойчивых сколь-
зящих движений S+1 = {x = 1, z > b+ = b +2λω , y < 0} и S+2 = {x = -1,
z > b+ = b + 2λω , y > 0}. На поверхностях S+1 и S+2 векторное поле системы Al
ориентировано в сторону увеличения x, а системы Ar в сторону уменьше-
ния x (векторные поля систем Al и Ar “встречаются” на этих поверхностях).
Скользящие движения на этих поверхностях задаются двумерными систе-
мами, которые получаются по доопределению А.Ф. Филиппова [22], анало-
гичного одному из доопределений Ю.И. Неймарка [2]. Это доопределение в
рассматриваемом случае приобретает вид
X
(5)
= αFr(X) + (1 - α)Fl
(X).
Здесь коэффициент α определен скалярным произведением
(6)
(αFr(X) + (1 - α)Fl
(X), ▽s) = 0,
где градиент функции s(X), определяющей поверхность скользящих движе-
ний s(X) = 0, в рассматриваемом случае есть вектор ▽s(1, 0, 0). Из (1), (2),
(5), (6) получаем, что система скользящих движений имеет вид
λδ
y = -δy +
,
ω(z - b) - λ
(7)
λω
Ż = -ω - λ(z - b) -
ω(z - b) - λ
Из системы(7) получаем простую динамику скользящих движений. По-
скольку в (7) Ż
< 0, координата z уменьшается и любая траектория поки-
S+
1,2
дает S+1,2 через линии срыва z = b+. В зависимости от параметров системы (1)
роль скользящих движений в динамике системы (1) разная. Рассмотрим два
основных случая.
4. Аттракторы без скользящих движений
В [16] доказано, что в области параметров
ω ln 2
δ>δcr =
,
π
(8)
√
2
)}
λ
{λ(
ω
b<bcr =2
1+
exp
arctg
+π
ω2
ω
λ
аттракторы системы (1) не содержат скользящих движений. При условиях (8)
строго доказано следующее утверждение [16].
33
el
er
z
y
Os
x
Рис. 2. Аттрактор лоренцевского типа, существующий в системе (1) при зна-
чениях параметров b = 3,8, α = 2, ν = 0,75, δ = 0,588, ω = 2 и λ = 0,294 из
области (9). Траектории аттрактора склеены из траекторий седловой систе-
мы As (изображены черным) и траекторий фокусных систем Al,r (изображены
серым).
Теорема 1
[16]. 1. В области параметров
3πλ
3πλ
bhet = γhet exp
≤ b < ν-1 exp
,
2ω
2ω
где γhet(ν) - обратная функция функции ν = 1 +ln2-lnγln(γ-1) , существует стран-
ный хаотический аттрактор лоренцевского типа, родившийся в результа-
те гетероклинической бифуркации при b = bhet и сосуществующий с двумя
устойчивыми фокусами el и er;
2. Поверхность
3πλ
bAH = ν-1 exp
2ω
соответствует бифуркации Андронова-Хопфа, при которой два симмет-
ричных седловых цикла влипают в устойчивые состояния равновесия el и er;
3. В области параметров
(9)
bAH ≤ b ≤ bcr
странный сингулярно-гиперболический аттрактор является единственным
аттрактором системы (1) (см. рис. 2).
5. Аттракторы, содержащие скользящие движения
При b > bcr траектории аттрактора системы (1) могут попадать на по-
верхности скользящих движений. При этом любая периодическая орбита,
содержащая участок скользящих движений, становится устойчивой. Дело в
том, что неустойчивость периодических движений системы определена на-
правлением оси x (см. систему As в (1)). Ось x перпендикулярна плоско-
сти скользящих движений, вдоль которой траектории попадают на них не
34
асимптотически. Тем самым неустойчивость вдоль седловых орбит компен-
сируется суперустойчивостью скользящих плоскостей. Если же траектории
неблуждающего множества системы не попадают на поверхности скользя-
щих движений, то они продолжают оставаться седловыми, такими же, как и
при b < bcr в случае гиперболического аттрактора. Возможность существова-
ния аттракторов, содержащих как устойчивые траектории со скользящими
движениями, так и седловые траектории, усложняет решение задачи о раз-
рушении странного аттрактора и приводит к необходимости использования
качественно-численных методов. При численном исследовании системы (1),
проводимом далее, обращаем внимание на следующие возможные эффекты.
1. Стабилизация седловых траекторий, попадающих на плоскости скользя-
щих движений, т.е. эффект появления устойчивых орбит. При малом откло-
нении параметра b от критического значения µ = 1 - bcr/b > 0, µ ≪ 1, устой-
чивые орбиты имеют большие периоды, а их области притяжения (basins)
малы настолько, что их сложно найти при численном моделировании. Та-
ким образом, при малых µ > 0 аттрактор перестает быть гиперболическим и
становится так называемым квазистранным аттрактором [23].
2. Бифуркация рождения устойчивого цикла из гомоклинической орбиты
седла с положительной седловой величиной. Этот эффект является неожи-
данным, поскольку в случае гладких или даже кусочно-гладких непрерывных
систем цикл должен рождаться неустойчивым.
3. Возможность C-бифуркации [11], при которой из устойчивого предель-
ного цикла рождаются два симметричных устойчивых цикла того же пе-
риода, а сам цикл, покидая поверхность скользящих движений, становит-
ся седловым. В гладких системах аналогом такой бифуркации является би-
фуркация раздвоения коразмерности два (pitchfork bifurcation), происходя-
щая в симметричных системах, при которой из предельного цикла, теряюще-
го устойчивость через мультипликатор m = +1, рождаются два устойчивых
цикла того же периода. Далее для простоты такую C-бифуркацию в систе-
ме (1) будем называть бифуркацией раздвоения.
5.1. Бифуркации аттракторов, содержащих скользящие движения
Последовательность бифуркаций в области параметров b > bcr, для точек
которой аттрактор содержит скользящие движения, удобнее рассматривать
при уменьшении параметра b, начиная с больших значений b ≈ 300.
На рис. 3 изображена бифуркационная диаграмма системы (1). При каж-
дом фиксированном значении параметра b по оси ординат указаны точки
пересечения установившихся движений системы с секущей плоскостью D.
Горизонтальные линии вблизи линий x = ±1 являются крайним следом пре-
дельных циклов.
На рис. 3,a бифуркационная диаграмма построена для всего интерва-
ла значений параметра b ∈ [0, 300]. При b > 283 на диаграмме существуют
только следы двухобходного глобально устойчивого предельного цикла (см.
рис. 4,a).
Вертикальная штриховая линия в точке b = 283 соответствует первой
C-бифуркации раздвоения цикла. В этой точке от крайних следов отходят
35
x
a
x
б
1
1
0
0
-1
-1
29
143
283
2
10
21
29
b
b
x
в
1
0
-1
bсr = 3,95
4,5
bk + 1
bk
5,5
b
Рис. 3. Бифуркационная диаграмма системы (1) при α = 2, ω = 2, δ = 0,588,
λ = 0,294. По оси ординат изображены точки пересечения установившихся
движений системы (1) с секущей плоскостью D.
две кривые. Вместе с горизонтальными линиями они соответствуют следам
двух устойчивых предельных циклов, родившихся в результате бифуркации
раздвоения (см. рис. 4,б).
Вертикальной штриховой линией в точке b = 143 отмечена первая гомо-
клиническая бифуркация, при которой два устойчивых цикла сливаются, по-
падая в линию (x = 0, |y| < 1, z = b) на устойчивом многообразии седла Ws,
и образуют гомоклиническую бабочку (см. рис. 4,в). Этому соответствует пе-
ресечение кривых в точке (b = 143, x = 0).
При дальнейшем уменьшении b гомоклническая бабочка разрушается
и рождается глобально устойчивый предельный цикл удвоенного периода
(см. рис. 4,г). Все четыре кривые бифуркационной диаграммы на интер-
вале b ∈ (29, 143) являются следом этого цикла до следующей бифуркации
раздвоения, наступающей при b = 29.
Рисунки 3,б и 3,в являются увеличенными фрагментами рис. 3,a. На
рис. 3,б изображена вторая пара бифуркаций “раздвоение (b = 29) - бифур-
кация гомоклинической бабочки (b = 21)”.
При дальнейшем уменьшении параметра b пары бифуркаций “раздвоение-
гомоклиническая бабочка” повторяются, удваивая период (обходность) устой-
36
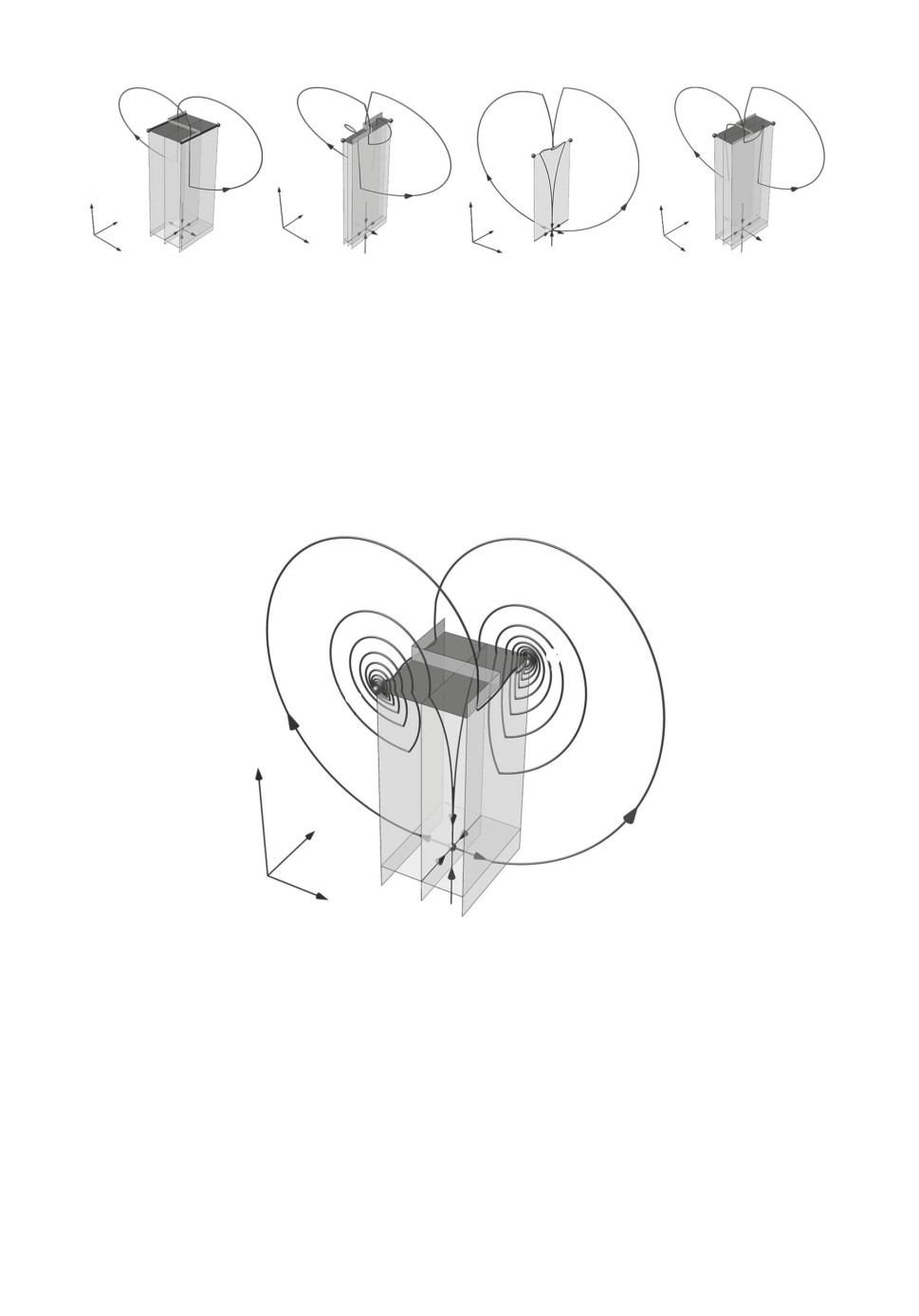
a
б
в
г
wl
el
er
er
er
el
er
el
wr
el
z
z
z
z
y
O
y
s
y
Os
y
O
s
x
Os
x
x
x
Рис. 4. Первая последовательность смены фазовых картин системы (1) при
уменьшении параметра b. a При b = 300 в системе существует двухобход-
ный глобально устойчивый предельный цикл, огибающий устойчивые одно-
мерные многообразия wl,r фокусов el,r по одному разу. б При b = 270 со-
существуют два устойчивых предельных цикла того же периода. в При
b = 143,07 эти предельные циклы влипают в гомоклиническую бабочку и при
дальнейшем уменьшении параметра образуют глобально устойчивый предель-
ный цикл удвоенного периода. г Фазовый портрет этого четырехобходного
цикла при b = 40. Траектория цикла огибает каждое из многообразий wl,r по
два раза. Остальные параметры: α = 2, ω = 2, δ = 0,588, λ = 0,294.
er
el
z
y
Os
x
Рис. 5. Пример гомоклинической бабочки, образованной двумя симметричны-
ми многообходными гомоклиническими орбитами при b = 4,075. Остальные
параметры: α = 2, ω = 2, δ = 0,588, λ = 0,294.
чивых циклов (см. рис. 5). Эти пары накапливаются при b → bcr, образуя
последовательность, которая служит скелетом бифуркационного множества.
Из рис. 3,в, видно, что каждый интервал (bk+1, bk), где bk - предыдущая,
а bk+1 - последующая бифуркации раздвоения, содержит хаотическое окно.
Бифуркационное множество в хаотических окнах усложняется с увеличени-
ем k. По-видимому, это связано с тем, что участки скользящих движений на
неблуждающих траекториях уменьшаются с ростом k, т.е. при приближении
к области существования странного аттрактора.
37
Область слева от вертикальной штриховой линии bcr = 3,95 на рис. 3,в
соответствует сингулярно-гиперболическому аттрактору.
Следует отметить, что по известному сценарию перехода к хаосу для ло-
ренцеподобных гладких потоков с отрицательной седловой величиной [24, 25]
при увеличении бифуркационного параметра происходит удвоение периода
устойчивых предельных циклов через каскад бифуркаций гомоклинических
орбит.
Существенное отличие сценария, полученного в настоящей статье, состо-
ит в том, что у системы (1) седловая величина положительна. Однако цик-
лы, рождающиеся из гомоклинических орбит, в отличие от случая гладких
систем [26] устойчивы из-за наличия скользящих движений. Кроме того, в
рассматриваемом случае присутствуют окна хаотических движений наряду
с окнами устойчивых периодических орбит.
6. Заключение
В статье проведено качественно-численное исследование сложного би-
фуркационного множества, соответствующего разрушению сингулярно-
гиперболического аттрактора в кусочно-линейной системе, являющейся ана-
логом известной системы Лоренца. Это разрушение связано с тем, что в
структуре аттрактора появляются скользящие движения. Бифуркационное
множество представляет собой последовательность паттернов, сходящуюся к
критическому значению параметра, соответствующему началу разрушения
странного аттрактора. Основу бифуркационных паттернов составляют C-би-
фуркации, при которых происходят раздвоения многообходных предельных
циклов, и бифуркации многообходных гомоклинических орбит, приводящих
к рождению устойчивых предельных циклов с удвоенным периодом. Эти пат-
терны содержат хаотические окна, структура которых усложняется вдоль по-
следовательности. Нетривиальная задача строгого анализа, кратко описанно-
го в работе сложного бифуркационного перехода от устойчивого предельного
цикла к странному аттрактору, требует построения точечных отображений,
учитывающих скользящие движения, и выходит за рамки настоящей статьи.
СПИСОК ЛИТЕРАТУРЫ
1. Kuznetsov Y. Elements of Applied Bifurcation Theory. N.Y.: Springer, 2004.
2. Неймарк Ю.И. Метод точечных отображений в теории нелинейных колебаний.
М.: Наука, 1972.
3. Неймарк Ю.И. О скользящем режиме релейных систем автоматического регу-
лирования // АиТ. 1957. № 1. С. 27-33.
4. Champneys A.R., di Bernardo M. Piecewise Smooth Dynamical Systems // Schol-
arpedia. 2008. V. 3. No. 9. P. 4041.
5. di Bernardo M., Budd C.J., Champneys A.R., Kowalczyk P. Piecewise-smooth Dy-
namical Systems: Theory and Applications. London: Springer, 2008.
6. Andronov A.A., Vitt A.A., Khaikin S.E. Theory of Oscillations. M.: Fizmatgiz, 1959.
7. Zhusubaliyev Z.T., Mosekilde E. Bifurcations and Chaos in Piecewise-Smooth Dy-
namical Systems. Singapore: World Scientific, 2003.
38
8.
Luo A.C.J., Chen L. Periodic Motions and Grazing in a Harmonically Forced, Piece-
wise, Linear Oscillator with Impacts // Chaos Soliton. Fract. 2005. V. 24. No. 2.
P. 567-578.
9.
Gubar’ N.A. Investigation of a Piecewise Linear Dynamical System with Three Pa-
rameters // J. Appl. Math. Mech. 1961. V. 25. No. 6. P. 1011-1023.
10.
Matsumoto T., Chua L.O., Komoro M. Birth and Death of the Double Scroll //
Physica D. 1987. V. 24. No. 1-3. P. 97-124.
11.
di Bernardo M., Feigin M.I., Hogan S.J., Homer M.E. Local Analysis of C-Bifur-
cations in n-Dimensional Piecewise-Smooth Dynamical Systems // Chaos Soliton.
Fract. 1999. V. 10. No. 11. P. 1881-1908.
12.
Simpson D.J.W., Hogan S.J., Kuske R. Stochastic Regular Grazing Bifurcations //
SIAM J. Appl. Dyn. Syst. 2013. V. 12. No. 2. P. 533-559.
13.
Belykh I., Jeter R., Belykh V. Foot Force Models of Crowd Dynamics on a Wobbly
Bridge // Sci. Adv. 2017. V. 3. No. 11. P. e1701512.
14.
Macdonald J.H.G. Lateral Excitation of Bridges by Balancing Pedestrians // Proc.
Royal Society of London. A: Mathematical, Physical and Engineering Sciences. 2008.
V. 465. No. 1. P. 1055-1073.
15.
Belykh I.V., Jeter R., Belykh V.N. Bistable Gaits and Wobbling Induced by
Pedestrian-Bridge Interactions // Chaos: An Interdisciplinary J. Nonlinear Sci. 2016.
V. 26. No. 11. P. 116314.
16.
Belykh V.N., Barabash N.V., Belykh I.V. A Lorenz-type Attractor in a Piecewise-
Smooth System: Rigorous Results // Chaos: An Interdisciplinary J. Nonlinear Sci.
2019. V. 29. No. 10. P. 103108.
17.
Lorenz E. Deterministic Nonperiodic Flow // J. Atmos. Sci. 1963. V. 20. No. 2.
P. 130-141.
18.
Sparrow C. The Lorenz Equations; Bifurcations, Chaos and Strange Attractors. N.Y.:
Springer, 1982.
19.
Bykov V.V., Shilnikov A.L. On Boundaries of the Region of Existence of the Lorenz
Attractor // Selecta Math. Sovietica. 1992. V. 11. No. 4. P. 375-382.
20.
Doedel E.J., Krauskopf B., Osinga H.M. Global Bifurcations of the Lorenz Mani-
fold // Nonlinearity. 2006. V. 19. No. 12. P. 2947.
21.
Creaser J.L., Krauskopf B., Osinga H.M. Finding First Foliation Tangencies in the
Lorenz System // SIAM J. Appl. Dyn. Syst. 2017. V. 16. No. 4. P. 2127-2164.
22.
Filippov A.F. Differential Equations with Discontinuous Righthand sides. Dordrecht:
Kluwier Acad. Press, 1988.
23.
Белых В.Н. Странный аттрактор // Большая российская энциклопедия. 2016.
Т. 31. С. 285-286.
24.
Arneodo A., Coullet P., Tresser C. A Possible New Mechanism for the Onset of
Turbulence // Physics Lett. A. Elsevier Publ. 1981. V. 81. No. 4. P. 197-201.
25.
Lyubimov D.V., Zaks M.A. Two Mechanisms of the Transition to Chaos in Finite-
Dimensional Models of Convection // Physica D Nonlinear Phenomena. 1983. V. 8.
No. 1-2. P. 52-64.
26.
Шильников Л.П., Шильников А.Л., Тураев Д.В., Чуа Л. Методы качественной
теории в нелинейной динамике. Ч. 2. М.-Ижевск: НИЦ “Регулярная и хаотиче-
ская динамика”. Институт компьютерных исследований, 2009.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 18.10.2019
Принята к публикации 30.01.2020
39