Автоматика и телемеханика, № 8, 2020
© 2020 г. Р.С. БИРЮКОВ, канд. физ.-мат. наук (biryukovrs@gmail.com)
(Нижегородский государственный архитектурно-строительный университет)
ОБОБЩЕННОЕ H2-УПРАВЛЕНИЕ ЛИНЕЙНЫМ
НЕПРЕРЫВНО-ДИСКРЕТНЫМ ОБЪЕКТОМ
НА КОНЕЧНОМ ГОРИЗОНТЕ1
На конечном горизонте рассматривается линейный непрерывно-дис-
кретный нестационарный объект, описываемый совокупностью диффе-
ренциальных и разностных уравнений. Вводится понятие обобщенной
H2-нормы непрерывно-дискретного объекта как индуцированной нормы
линейного оператора, порожденного рассматриваемой системой. Получе-
на ее характеризация как в терминах разностных уравнений Ляпунова,
так и в терминах рекуррентных линейных матричных неравенств. Синте-
зированы дискретные нестационарные оптимальные законы управления,
в том числе и многокритериальные, при которых обобщенная H2-норма
замкнутой системы принимает минимальное значение.
Ключевые слова: линейная нестационарная гибридная система, обобщен-
ная H2-норма, оптимальное управление, многокритериальная задача.
DOI: 10.31857/S0005231020080048
1. Введение
Современные системы управления, как правило, реализуются в цифро-
вом виде, в то время как реальные объекты функционируют в непрерывном
времени. Подобное разделение приводит к тому, что регулятор использует
значения непрерывного сигнала, поступающего с объекта, лишь в дискрет-
ные моменты времени. По этой причине становится важной задача синтеза
дискретного регулятора, максимально полно учитывающего поведение объ-
екта в моменты времени между измерениями. Одним из показателей качества
функционирования системы управления является максимальное отклонение
целевого выхода системы от некоторого номинального значения по отноше-
нию к внешнему возмущению.
В [10] для непрерывных систем, а в [5] для дискретных, было введено по-
нятие обобщенной H2-нормы, как максимальное отношение максимального
по времени значения евклидовой нормы выхода к L2-норме неопределенного
внешнего возмущения системы. В [1, 9, 11] были получены условия существо-
вания оптимального регулятора по выходу на бесконечном горизонте как в
терминах уравнения Риккати, так и в терминах линейных матричных нера-
венств. В работах [2-4] для непрерывных и дискретных систем было введено
1 Работа выполнена по теме государственного задания (№ 0729-2020-0055) при частич-
ной поддержке Российского фонда фундаментальных исследований (проекты №№ 18-41-
520002, 19-01-00289) и научно-образовательного математического центра “Математика тех-
нологий будущего”.
40
понятие максимального уклонения как естественное расширение обобщенной
H2-нормы на системы с ненулевым начальным состоянием.
Для непрерывно-дискретных систем на бесконечном горизонте, описывае-
мых совокупностью дифференциальных и разностных уравнений, в [6-8] бы-
ли получены оценки обобщенной H2-нормы и синтезированы законы управ-
ления, минимизирующие верхнюю оценку нормы, в терминах линейных мат-
ричных неравенств [7, 8] и в терминах дифференциальных уравнений Рикка-
ти [6].
В данной статье рассматривается непрерывно-дискретный объект с дис-
кретным целевым выходом на конечном горизонте при ненулевых начальных
условиях. Следуя работам [2-4, 10] вводится понятие обобщенной H2-нормы
как индуцированной нормы линейного оператора, порожденного рассматри-
ваемой системой. Подобно тому как это делалось в работах [3, 10], получена
ее характеризация как в терминах разностных уравнений Ляпунова, так и
в терминах рекуррентных линейных матричных неравенств, что позволяет
синтезировать оптимальные законы управления.
2. Обобщенная H2-норма непрерывно-дискретного объекта
Рассмотрим линейный непрерывно-дискретный нестационарный объект,
описываемый совокупностью дифференциальных и разностных уравнений
x = Ac(t)x + Δc(t)ξk + Bc(t)v, tk ≤ t < tk+1, k = 0,1,... ,N - 1,
ξk+1 = Ad,kξk + Δd,kx(tk) + Bd,kwk,
(1)
zk = Cc,kx(tk) + Cd,kξk,
где x ∈ Rnx и ξk ∈ Rnξ векторы состояния непрерывной и дискретной ча-
стей системы соответственно, v(t) ∈ Rnv
непрерывное внешнее возмуще-
ние кусочно-непрерывная справа вектор-функция, wk ∈ Rnw дискретное
внешнее возмущение и zk ∈ Rnz целевой выход. Будем считать, что
(
)
(
)
(
)
v∈L2
[t0, tN ], Rnv
, w ={wk}∈l2
[0, N - 1], Rnw
, z ={zk}∈l∞
[0, N], Rnw
,
нормы в соответствующих пространствах определяются стандартным обра-
зом:
tN
∑
(2)
∥v∥2L
=
|v(t)|22dt,
∥w∥2 =l
|wk|22,
∥z∥∞ = max
|zk|2,
2
2
k=0,...,N
k=0
t0
здесь через | · |2 обозначена евклидова норма вектора. Кроме этого предпо-
ложим, что начальные условия x(t0) = x0 и ξ0 в общем случае ненулевые и
неизвестны, а их влияние на поведение объекта интерпретируется как на-
чальное возмущение. Матричные функции Ac(t), Bc(t) и Δc(t) таковы, что
при выбранных начальных условиях и возмущениях решение системы на рас-
сматриваемом отрезке существует и единственно.
Система (1) порождает линейный оператор S вида
(
)
(
)
(
)
(3)
S :Rnx ×Rnξ ×L2
[t0, tN ], Rnv
×l2
[0, N - 1], Rnw
→l∞
[0, N], Rnw
,
41
отображающий начальные состояния x0, ξ0 и внешние возмущения v, w в
целевой выход z. Определим норму элемента (x0, ξ0, v, w) формулой
√
(4)
= x⊤0Rx1x0 + ξ⊤0R-1ξξ0 + ∥v∥2L
+ ∥w∥2 ,
2
l2
где Rx = R⊤x > 0 и Rξ = R⊤ξ > 0 весовые матрицы, отражающие относи-
тельную важность учета неопределенностей начальных условий и внешних
возмущений.
Определение. Обобщенной H2-нормой непрерывно-дискретного объек-
та (1) назовем индуцированную норму оператора S, то есть
{
}
∥z∥∞
(5)
∥S∥∞/(R,2) = sup
: ∥(x0, ξ0, v, w)∥(R,2) = 0
∥(x0, ξ0, v, w)∥(R,2)
Перепишем соотношение (5) в развернутом виде:
max
|zn|2
n=0,...,N
(6)
∥S∥∞/(R,2) = sup
(
)1/2 ,
(x0,ξ0,v,w)
∫
∑
x⊤0Rx1x0 +ξ⊤0R-1ξξ0 +
|v(t)|22dt +
|wk|2
2
t0
k=0
где точная верхняя грань берется по всем таким наборам (x0, ξ0, v, w) для
которых знаменатель не обращается в ноль. Поскольку величина |zn|2 для
каждого n = 0, . . . , N зависит от внешних возмущений, определенных на от-
резке t0 ≤ t ≤ tn, то соотношение (6) можно переписать как
∥S∥∞/(R,2) =
|zn|2
(7)
= max sup
(
)1/2 ,
n=0,...,N (x0,ξ0,v,w)
∫
∑
x⊤0Rx1x0 + ξ⊤0R-1ξξ0 +
|v(t)|22dt +
|wk|2
2
t0
k=0
здесь точная верхняя грань берется, фактически, только по всем возмущени-
ям из отрезка t0 ≤ t ≤ tn. Таким образом, обобщенная H2-норма объекта (1)
представляет собой максимум из максимальных относительных значений мо-
дуля целевого выхода. Заметим, что в частном случае, когда в системе (1) от-
сутствует непрерывная часть, то есть когда x(t) ≡ 0 и v(t) ≡ 0, то введенная
таким образом обобщенная H2-норма совпадает с определенным в [3] макси-
мальным уклонением выхода дискретной системы.
Обозначим через Φ(t, s) фундаментальную матрицу Коши системы урав-
нений
d
Φ(t, s) = Ac(t)Φ(t, s),
Φ(s, s) = I,
dt
42
и определим матрицы
∫
Ac,k = Φ(tk+1,tk),
Δc,k =
Φ(tk+1, s)Δc(s)ds,
tk
∫
Qc,k =
Φ(tk+1, s)Bc(s)B⊤c(s)Φ⊤(tk+1, s)ds.
tk
Справедливо утверждение.
Теорема 1. Обобщенная H2-норма для непрерывно-дискретного объекта
(1) на заданном горизонте [t0, tN ] находится как
)
(
)
(8)
∥S∥∞/(R,2) = max
λ1/2max
CkPk
C⊤k
,
Ck =
Cc,k, Cd,k
,
k=0,...,N
где через λmax(·) обозначено максимальное собственное значение соответ-
ствующей матрицы, а Pk = P⊤k ≥ 0 решение разностного уравнения Ля-
пунова
]
]
[Ac,k Δc,k
[Qc,k
0
(9)
Pk+1
AkPk
A⊤k +Qk,
Ak =
,
Qk =
,
Δd,k Ad,k
0
Bd,kB⊤
d,k
с начальными условиями P0 = R = diag (Rx,Rξ).
Доказательства этого и последующих утверждений содержатся в Прило-
жении. Отметим, что в частном случае, когда начальные состояния объек-
та (1) нулевые, для вычисления обобщенной H2-нормы в рекуррентных урав-
нениях (9) необходимо взять в качестве начальных условий P0 = 0. В другом
частном случае, когда внешние возмущения отсутствуют, а начальные со-
стояния неизвестны, обобщенная H2-норма определяется соотношениями (8)
и (9), в которых следует положитьQk = 0.
Следующая теорема позволяет ответить на вопрос о наихудших начальных
условиях x∗0, ξ∗0 и внешних возмущениях v∗, w∗ для которых достигается (5).
Сразу отметим, что поскольку система (1) линейна, а обобщенная H2-норма
представляет собой однородный функционал, то наихудшие начальные со-
стояния и внешние возмущения определяются неоднозначно, с точностью до
постоянного множителя.
Теорема 2. Если для непрерывно-дискретного объекта (1) на заданном
горизонте [t0, tN ] обобщенная H2-норма равна γ∗ и это значение достигает-
ся при k = k∗, то наихудшие начальные состояния и внешние возмущения
определяются как
[
]
x∗0
1
=
R-1Ψ⊤k∗,0C⊤k∗e,
ξ∗0
γ∗
(10)
[
]
[
]
v∗(t)
1
B⊤c(t)Φ⊤(tk+1,t)x
=
C⊤k∗
e,
Ψ⊤k∗,k+
w∗k
γ∗
B⊤d,kξ
43
)
здесь через e = emax
Ck∗Yk
C⊤k∗
обозначен нормированный собственный век-
тор матриц
Ck∗Yk
C⊤k∗, соответствующий ее максимальному собствен-
ному числу, а через Ψi,j
переходная матрица дискретной системы
ζk
Akζk, то есть
Ψ0,0 = I, Ψi,j
Ai-1
Ai-2 ..
Aj, i ≥ j + 1.
Из теоремы 2 следует, что обобщенная H2-норма на горизонте [t0, tN ] зави-
сит от значений, принимаемых возмущениями v∗, w∗ на отрезке t0 ≤ t ≤ tk∗ ,
и не зависит от значений вне этого отрезка.
Переформулируем теорему 1 в терминах линейных матричных неравенств,
символом ∗ обозначен соответствующий симметрический блок.
Теорема 3. Обобщенная H2-норма для непрерывно-дискретного объ-
екта
(1) на заданном горизонте [t0, tN ] находится из решения задачи
∥S∥2∞,2 = inf γ2, при ограничениях, определяемых линейными матричными
неравенствами:
[
]
[
]
Yk
∗
Yl
∗
k = 0,...,N - 1,
(11)
≥ 0,
≥ 0, Y0 ≥ R,
AkYk Yk+1 -Qk
ClYl
γ2I
l = 0,...,N,
точная нижняя грань берется по переменной γ и симметрическим неотри-
цательно определенным матрицам Y0, . . . , YN .
Доказательство теоремы 3 в настоящей работе опущено, поскольку дослов-
но повторяет основные шаги доказательства теоремы 2.2 из [3]. Также сде-
лаем замечания, аналогичные тем, что были сделаны к теореме 1. В случае,
если начальные состояния объекта (1) нулевые, для вычисления обобщенной
H2-нормы в неравенствах (11) необходимо положить Y0 ≥ 0, а в случае, ко-
гда внешние возмущения отсутствуют, а начальные состояния неизвестны, в
неравенствах (11) следует положитьQk = 0.
3. Синтез обобщенного H2-управления
Рассмотрим линейный непрерывно-дискретный нестационарный объект с
управлением, описываемый совокупностью дифференциальных и разностных
уравнений
x = Ac(t)x + Δc(t)ξk + Bc(t)v + Hc(t)u(t),
ξk+1 = Ad,kξk + Δd,kx(tk) + Bd,kwk + Hd,ku(tk),
(12)
zk = Cc,kx(tk) + Cd,kξk + Dku(tk),
tk ≤ t < tk+1, k = 0,... ,N - 1,
где u ∈ Rnu управление, а остальные переменные имеют тот же смысл,
что и ранее. Поставим задачу синтеза на конечном интервале времени [t0, tN ]
управления в виде нестационарной линейной обратной связи по состоянию
(13)
u(t) = uk = Θc,kx(tk) + Θd,kξk,
tk ≤ t < tk+1
,
k = 0,...,N - 1,
44
обеспечивающего минимальное значение обобщенной H2-нормы замкнутой
системы.
Справедливо следующее утверждение.
Теорема 4. Параметры оптимального обобщенного H2-регулятора ви-
да
(13) для)непрерывно-дискретного объекта
(12) находятся как
Θk =
(
=
Θc,k, Θd,k
= ZkY -1k, где матрицы Yk = Y ⊤k ≥ 0 и Zk являются решени-
ем задачи inf γ2 при ограничениях, определяемых линейными матричными
неравенствами:
[
]
[
]
Yk
⋆
Yl
⋆
(14)
≥ 0,
≥ 0, Y0
≥ R,
AkYk +HkZk Yk+1 -Qk
ClYl + DlZl γ2I
в которых k = 0, . . . , N - 1, l = 0, . . . , N и матрицыHk определены соотно-
шениями
[
]
∫
Hc,k
Hk =
,
Hc,k =
Φ(tk+1, s)Hc(s)ds.
Hd,k
tk
Предположим теперь, что объект управления имеет несколько целевых
выходов
x = Ac(t)x + Δc(t)ξk + Bc(t)v + Hc(t)u(t),
ξk+1 = Ad,kξk + Δd,kx(tk) + Bd,kwk + Hd,ku(tk),
(15)
z(j)k = C(j)c,kx(tk) + C(j)d,kξk + D(j)ku(tk),
j = 1,...,m,
tk ≤ t < tk+1, k = 0,... ,N - 1,
и требуется синтезировать управление вида (13) при котором значения обоб-
щенной H2-нормы по каждому целевому выходу замкнутой системы будут
минимальными. В общем случае указанные критерии являются противоречи-
выми, поэтому оптимальность следует понимать в смысле Парето. Обозначим
через Θ = {Θ1, . . . ,ΘN-1} матрицы обратной связи, а через γj (Θ) значение
обобщенной H2-нормы j-го целевого выхода системы (15), замкнутой регуля-
тором Θ. Скажем, что регулятор Θ∗ является оптимальным в смысле Парето,
если не существует другого регулятора Θ такого, что справедливы неравен-
ства γj(Θ) ≤ γj (Θ∗), j = 1, . . . , m, в которых по крайней мере одно выполня-
ется строго. Необходимые условия оптимальности по Парето формулируются
следующим образом [1].
Теорема 5. Пусть (γ1,...,γm) оптимальная по Парето точка в про-
странстве критериев и Θα минимум свертки Гермейера, скалярной функ-
ции вида
γj(Θ)
γj
(16)
G(Θ) = max
,
αj =
j=1,...,m αj
max
γj
j=1,...,m
Тогда точка Θα принадлежит множеству Парето и γj(Θα) = γj , j =
= 1, . . . , m.
45
В соответствии с теоремой 5, оптимальные по Парето решения в рассмат-
риваемой многокритериальной задаче следует искать среди оптимальных ре-
шений для свертки Гермейера. Применим теорему 3 к выражению (16), тогда:
)
(17)
G(Θ) = max
max
α-1jλ1/2max
C(j)kYk
C(j)⊤k
,
j=1,...,m
k=0,...,N
здесь Yk = Y⊤k ≥ 0 - решения уравнения (9) для замкнутой системы. Представ-
ление (17) позволяет свести поиск оптимального решения для свертки Гер-
мейера к решению задачи выпуклого полуопределенного программирования.
Теорема 6. Параметры оптимальных по Парето обобщенных H2-регу-
ляторов вида (13) для непрерывно-дискретного объекта (15) находятся как
Θα,k = ZkY-1k, где матрицы Yk = Y⊤k ≥ 0 и Zk являются решением зада-
чи inf γ2 при ограничениях, определяемых линейными матричными неравен-
ствами:
[
]
Yk
⋆
≥ 0,
AkYk +HkZk Yk+1 -Qk
(18)
[
]
Yl
⋆
≥ 0,
Y0 ≥ R,
C(j)lYl + D(j)lZl α2jγ2I
в которых k = 0, . . . , N - 1, l = 0, . . . , N и j = 1, . . . , m.
4. Пример
Рассмотрим механическую систему с одной степенью свободы, состоящую
из основания ¾1¿ и объекта ¾2¿, связанного с основанием через виброизоля-
тор (рис. 1). Математическая модель изоляции объекта от основания, совер-
шающего поступательное движение, описывается следующим дифференци-
альным уравнением:
∑
(19)
x = u + v + wkδ(t - tk),
x(0) = x10,
x(0) = x20,
k=0
где x координата защищаемого объекта, u управляющее силовое воздей-
ствие, порождаемое виброизолятором, v непрерывное внешнее воздействие,
с точностью до знака совпадающее с ускорением основания, и wk дискрет-
ное внешнее возмущение, представляющее собой импульсы, приложенные к
основанию. Моменты времени tk, k = 0, . . . , N - 1, в которые происходят уда-
ры по основанию, считаются заданными и образуют монотонно возрастаю-
щую последовательность.
Перепишем уравнение (19) в матрично-векторном виде (12). Для этого
определим переменную x2 формулой
∑
x2 = x -
wkη(t - tk),
k=0
46
x1
2
u
1
v, wk
Рис. 1. Схематическое изображение модели защиты от ударов и вибрации.
где через η(t) обозначена функция Хевисайда. Полагая теперь x = x1 и вво-
дя дискретную переменную ξk, равную суммарному импульсу, сообщенному
основанию за время tk+1, приходим к системе
x1 = x2 + ξk,
tk ≤ t < tk+1,
(20)
x2 = u + v,
ξk+1 = ξk + wk,
с начальными условиями x1(0) = x10, x2(0) = x20 и ξ0 = 0.
Введем в рассмотрение два функционала, характеризующих качество виб-
роизоляции:
max
x
1(tk)
k=0,...,N
J1(u) = sup
√
,
ζ⊤0R ζ0 + ∥v∥2L2 + ∥w∥2
l2
(21)
max
u(tk)
k=0,...,N
J2(u) = sup
√
ζ⊤0R ζ0 + ∥v∥2L2 + ∥w∥2
l2
здесь ζ0 = column (x10, x20, ξ0) и точная верхняя грань берется по всем началь-
ным условиям ζ0 и внешним возмущениям v, w при которых знаменатель не
обращается в ноль. Нетрудно видеть, что функционал J1 характеризует мак-
симальные смещения защищаемого тела относительно основания, а функцио-
нал J2 определяет максимальное управляющее усилие. Введенные критерии
являются противоречивыми в том смысле, что чем меньше первый функцио-
нал, то есть чем меньше смещается тело, тем большее управляющее воздей-
ствие порождается изолятором, что соответствует большему значению вто-
рого функционала, и наоборот. Требуется синтезировать кусочно-постоянное
управление вида uk = u(tk) = θ1,kx1(tk) + θ2,kx2(tk) + θ3,kξk при tk ≤ t < tk+1,
минимизирующее в смысле Парето оба критерия J1 и J2.
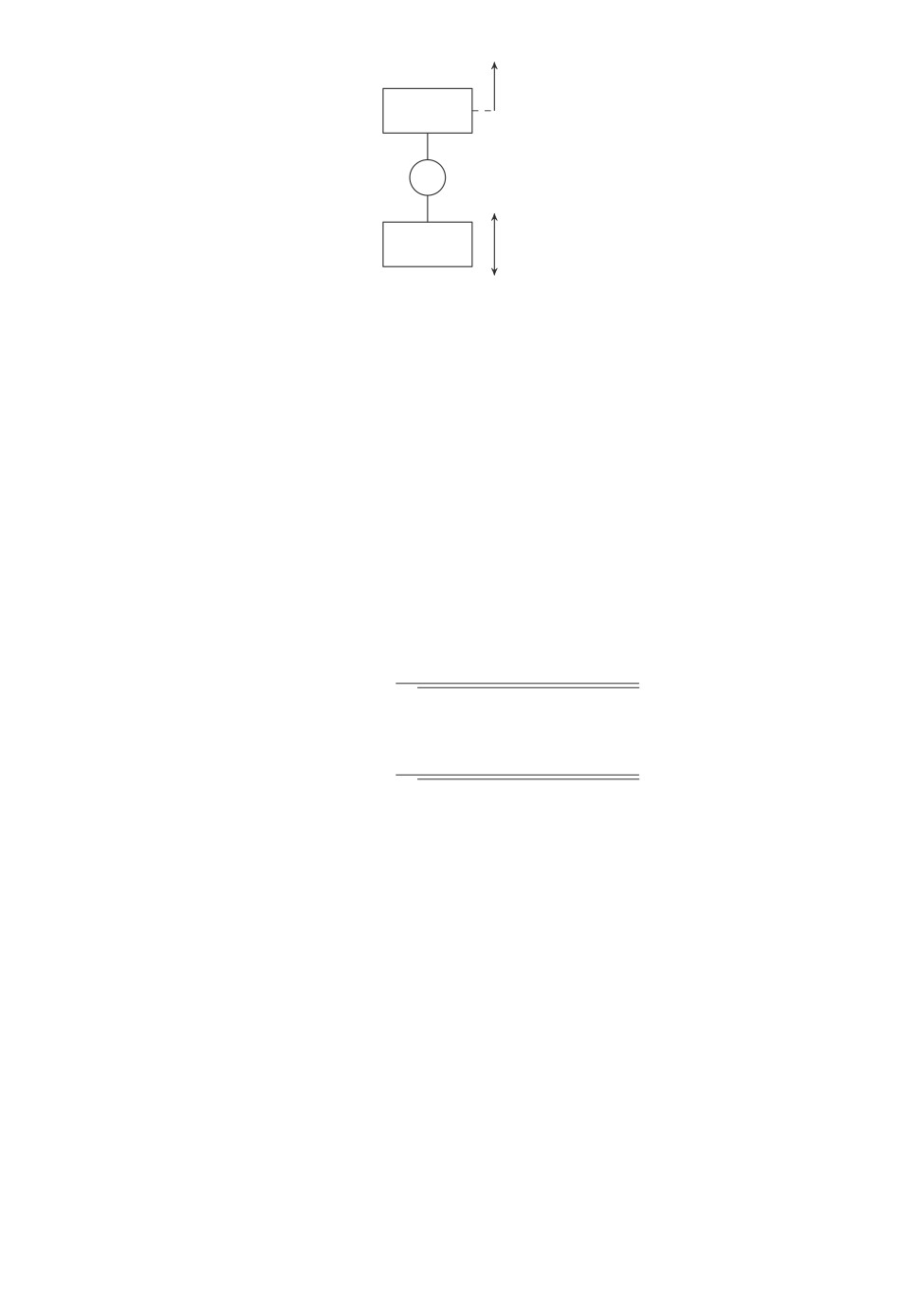
Для численного решения указанной задачи, положим Rx = 10I, Rξ = 1,
N = 5 и рассмотрим два множества моментов времени, в которые происходят
удары по основанию: S1 = {0; 2; 4; . . . ; 20} и S2 = {0,5; 1,5; 2,0; 6,0; 10,0; 14,0;
18,0; 18,5; 19,5; 20,0}. Используя теорему 6 были синтезированы оптимальные
в смысле Парето регуляторыΘα,k и вычислены соответствующие им опти-
47
J2
8
7
6
5
4
A2
3
2
A1
1
0
1
2
3
4
5
6
7
8
J1
Рис. 2. Парето-фронт.
0
-0,2
q1
q2
-0,4
q3
-0,6
-0,8
2
4
6
8
10
12
14
16
18
20
t
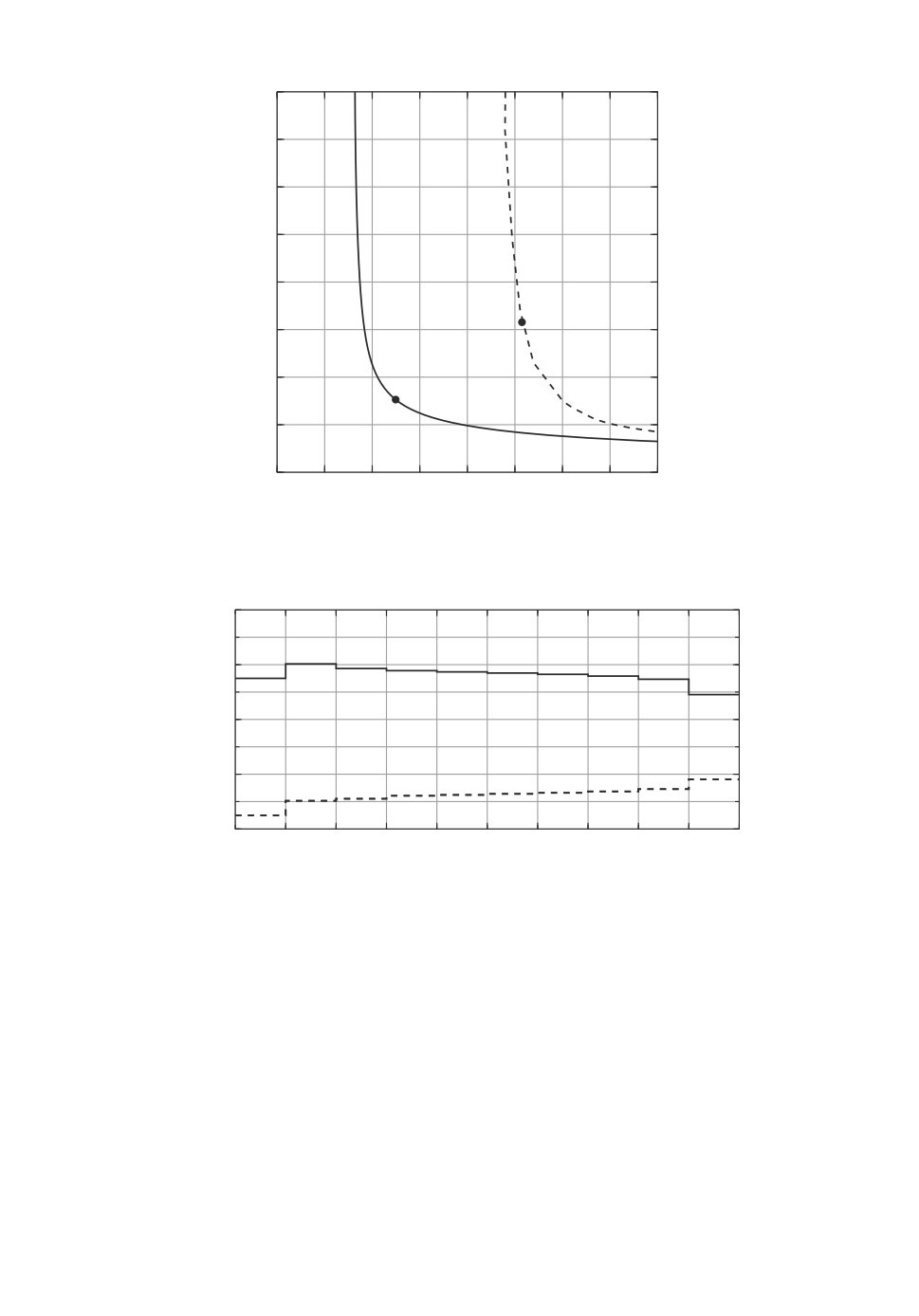
Рис. 3. Графики зависимостей от времени оптимальных по Парето коэффи-
циентов обратной связи.
мальные значения функционалов. На рис. 2 на плоскости критериев (J1, J2)
сплошной кривой изображен Парето-фронт для множества S1, а пунктир-
ной для множества S2. Точки A1(2,493; 1,528) и A2(5,148; 3,156) соответ-
ствуют параметру свертки α = 0,62. Для сравнения приведем значение перво-
го функционала в случае отсутствия управления: для множества S1 получа-
ется J1 = 65,167, а для S2 J1 = 67,021. Отметим следующую особенность,
замеченную при численных экспериментах: чем сильнее моменты времени tk
¾отличаются¿ от равномерной сетки, тем сильнее Парето-фронт сдвигается
вправо. На рис. 3 приведены графики зависимости от времени оптимальных
по Парето коэффициентов обратной связиΘα,k, соответствующих точке A1:
48
сплошная кривая соответствует коэффициенту θ1,k, штриховая коэффици-
ентам θ2,k и θ3,k, которые, как оказалось при численных расчетах, совпадают.
5. Заключение
В работе для линейного непрерывно-дискретного нестационарного объек-
та с дискретным целевым выходом вводится понятие обобщенной H2-нормы,
как индуцированной нормы линейного оператора, порожденного этим объек-
том. Показано, что эта характеристика есть максимальное отношения макси-
мального по времени значения евклидовой нормы выхода к смешанной норме
неизвестных начальных условий и внешних возмущений. Установлено, что
вычисление обобщенной H2-нормы сводится к решению задачи выпуклого
полуопределенного программирования, это позволяет решить задачу синте-
за оптимальных законов управления, обеспечивающих минимально возмож-
ное значение обобщенной H2-нормы замкнутой системы одного или несколь-
ких выходов. Эффективность предложенного подхода продемонстрирована
результатами численных экспериментов, проведенных для задачи активной
виброзащиты.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Рассмотрим оператор S∗, двойствен-
ный к оператору (3)
(
)
(Π.1)
S∗ : {zk} →
x0,ξ0,v(t),{wk}
,
здесь
z ∈l1([0,N],Rn),(x0,ξ0,v,w)∈ Rnx2×R2ξ×L2([t0,tN],Rnv)×l2([0,N - 1],Rnw).
Норма оператора S∗ задается выражением
}
{(
)
S∗
= sup
x0,ξ0,v,w
: ∥z∥l1 ≤ 1
(R,2)/1
(R,2)
и, согласно двойственности, справедливо следующее свойство:
(Π.2)
S
=
S∗
∞/(E,2)
(E,2)/1
Таким образом, вместо вычисления нормы оператора S можно вычислять
норму двойственного оператора S∗, что, как будет видно позднее, существен-
но проще.
Для определения выражения оператора S∗, рассмотрим элемент
z ∈ l1([0,N],Rn), тогда
(Π.3)
〈z, Sy〉 = 〈S∗z, y〉(R,2),
где y = (x0, ξ0, v, w) и скалярное произведение, стоящее в левой части, опре-
деляется выражением:
∑
〈z, ζ〉 =
z⊤kζk.
k=0
49
Скалярное произведение, стоящее в правой части, имеет вид
∫
∑
〈y1, y2〉(R,2) = x⊤0,1R-1x x0,2 + ξ⊤0,1R-1ξ ξ0,2 +
w⊤1,kw2,k + v⊤1(τ)v2(τ)dτ,
k=0
t0
и согласуется с определением нормы (4).
Перепишем систему (1) в полудискретной форме, последнее означает дис-
кретизацию только непрерывной переменной x, в то время как непрерывное
внешнее возмущение v остается неизменным, то есть
ζk+1
Akζk + Bkωk,
(Π.4)
zk
Ckζk,
где ωk = column (v(t), wk ) и
(
)
Bk : L2
[tk, tk+1), Rnv
×Rnw →Rnx+nξ
[
]
tk+1∫
(Π.5)
v(t)
:
→Φ(tk+1,τ)Bc(τ)v(τ)dτt
.
wk
k
Bd,kwk
Теперь, запишем замкнутое выражение, связывающее векторы
y = column(ζ0,ω0,...,ωN-1) и
z = column(z0,...,zN). Для этого вос-
пользуемся соотношением (Π.4), тогда
(Π.6)
z
AB̃
y,
здесь
)
(
)
C = diag
C0
C1,...
CN
,
B = diag
I,B0,...,BN-1
,
I
0
0
···
0
A0
I
0
···
0
A1
A0
A1
I
···
0
A=
.
AN-1 ..
A0
AN-1 ..
A1
AN-1 ..
A2
··· I
Таким образом, оператор S может быть представлен в виде S
A
B. Ис-
пользуя выражение (Π.3), легко увидеть, что двойственный оператор S∗ мо-
жет быть записан как
(Π.7)
S∗
B∗
A⊤C⊤,
(
)
гд
B∗ = diag
R-1,B∗0,... ,B∗N-1
и
[
]
[
]
(
)
x
B⊤c(t)Φ⊤(tk+1,t)x
B∗k : Rnx+nξ → L2
[tk, tk+1), Rnv
→
× Rnw2 :
ξ
B⊤d,kξ
50
Далее, с помощью представления (Π.7), нетрудно проверить справедли-
вость следующего выражения
∥S∗z∥2(R,2) = ∥S∗z∥2(R,2) = z⊤
C
C⊤z,
где
(
)
W
A
A⊤,
Q = diag
R-1,Q0,... ,QN-1
Поскольку матриц
C является блочно-диагональной, рассмотрим вспомога-
(
)
тельную блочно-диагональную матриц
Y = diag
Y0,... ,YN
, имеющую те
же самые блоки на главной диагонали, что и матрица W . Блоки Yk удовле-
творяют линейному рекуррентному уравнению
Y0 = R-1, Yk+1
AkYk
A⊤k +Qk,
совпадающему с уравнением (9) и, кроме того, справедливы следующие пре-
образования
}
{
2
2
S∗
= sup
S∗z
: ∥z∥l1 ≤ 1
=
(R,2)/1
(R,2)
{
}
(Π.8)
= sup
z
C
C⊤z : ∥z∥l1 ≤ 1
=
{
}
)
= sup
z
C
Y
C⊤z : ∥z∥l1 ≤ 1
= max
λmax
CkYk
C⊤k
k=0,...,N
Последнее выражение совпадает с (8), что и завершает доказательство тео-
ремы
Доказательство теоремы 2. Для доказательства выражения (10),
предположим, что значение обобщенной H2-нормы равно γ∗ и достигается на
шаге k = k∗. В этом случае существует элемент
z∗ = column (0, . . . , 0, zk∗ , 0, . . . , 0),
∥z∗∥l1 = 1
такой, что
γ∗ =
S∗z∗
(R,2)
)
Равенство ∥z∗∥l1 = 1 означает, что zk∗ = emax
Ck∗Yk
C⊤k∗
, здесь y∗ = S∗z∗ =
= column (ζ∗, ω∗0, . . . , ω∗N-1) это вектор, составленный из наихудших началь-
ных условий и внешних возмущений, кроме этого, ∥y∗∥(R,2) = γ∗. Заметим,
что для вычисления y∗ следует выбрать k∗ столбец из матричного представ-
ления оператора S∗:
R-1
A⊤0 ..
A⊤k∗
C⊤k∗z
C⊤k∗zk∗
ζ∗
k∗
R-1Ψ⊤k∗,
ω∗0
B0
A⊤1 ..
A⊤k
C⊤k∗zk∗
C⊤k∗zk∗
B0Ψ⊤k∗,
y∗ =
=
=
ω∗k∗
Bk
A⊤k∗
C⊤k∗zk∗
C⊤k∗zk∗
Bk∗Ψ⊤k∗,k
ω∗
N-1
0
0
51
Наконец, чтобы получить выражение (10), нужно умножить вектор y∗ на
1/γ∗, поскольку в определении обобщенной H2-нормы (5) вектор наихуд-
ших начальных условий и внешних возмущений удовлетворяет условию
∥y∗∥(R,2) = 1. Теорема 2 доказана.
Доказательство теоремы 4. Запишем уравнение системы (12), замк-
нутой обратной связью вида (13), тогда:
(
)
ζk+1 =
Ak +Hk Θk
ζk + Bkωk,
(Π.9)
)
zk =
Ck + Dk Θk
ζk.
Согласно теореме 3, обобщенная H2-норма системы (Π.9) может быть вы-
числена как решение задачи (11), в которой матрицы
Ak
Ck следует за-
менить н
Ak +Hk Θk
Ck + Dk Θk соответственно. Вводя новые переменные
Zk =ΘkYk, приходим к неравенствам (14). Теорема 4 доказана.
Доказательство теоремы 6. Для доказательства теоремы заметим,
что равенство (17) может быть записано как
)
G(Θ) = max
max
α-1jλ1/2max
C(j)kYk
C(j)⊤k
=
j=1,...,m
k=0,...,N
(
)
= max
max
λ1/2max
α-2j
C(j)kYkC(j)⊤k
,
j=1,...,m
k=0,...,N
следовательно, в неравенствах (14) достаточно заменить матриц
Ck иDk на
α-1j
C(j)k и α-1j Dk, после чего получим неравенства (18). Теорема 6 доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Баландин Д.В., Коган М.М. Оптимальное по Парето обобщенное H2-управление
и задачи виброзащиты // АиT. 2017. № 8. С. 76-90.
Balandin D.V., Kogan M.M. Pareto Optimal Generalized H2-Control and Vibropro-
tection Problems // Autom. Remote Control. 2017. V. 78. No. 8. P. 1417-1429.
2. Баландин Д.В., Бирюков Р.С., Коган М.М. Оптимальное управление макси-
мальными уклонениями выходов линейной нестационарной системы на конеч-
ном интервале времени // АиТ. 2019. № 10. C. 37-61.
Balandin D.V., Biryukov R.S., Kogan M.M. Optimal Control of Maximum Output
Deviations of a Linear Time-Varying System on a Finite Horizon // Autom. Remote
Control. 2019. V. 80. No. 10. P. 1783-1802.
3. Баландин Д.В., Бирюков Р.С., Коган М.М. Оптимальное управление макси-
мальными уклонениями выходов линейной дискретной нестационарной систе-
мы // АиТ. 2019. № 12. С. 3-23.
Balandin D.V., Biryukov R.S., Kogan M.M. Minimax Control of Deviations for the
Outputs of a Linear Discrete Time-Varying System // Autom. Remote Control. 2019.
V. 80. No. 12. P. 2091-2107.
4. Balandin D.V., Biryukov R.S., Kogan M.M. Finite-Horizon Multi-Objective Gener-
alized H2 Control with Transients // Automatica. 2019. V. 106. No. 8. P. 27-34.
5. Chellabonia V., Haddad W.M., Bernstein D.S., Wilson D.A. Induced convolution
operator norms for discrete-time linear systems // Proc. 38th IEEE Conference on
Decision and Control. 1999. P. 487-492.
52
6. Khargonekar P.P., Sivashankar N. H2 optimal control for sampled-data systems //
Systems Control Lett. 1991. V. 17. No. 6. P. 425-436.
7. Kim J.H., Hagiwara T. Extensive theoretical/numerical comparative studies on H2
and generalized H2 norms in sampled-data systems // Int. J. Control. 2017. V. 90.
No. 11. P. 2538-2553.
8. Kim J.H., Hagiwara T. Upper/lower bounds of generalized H2 norms in sampled-
data systems with convergence rate analysis and discretization viewpoint // Systems
Control Letters. 2017. V. 107. P. 28-35.
9. Rotea M.A. The generalized H2 control problem // Automatica. 1993. V. 29. No. 2.
P. 373-385.
10. Wilson D.A. Convolution and Hankel Operator Norms for Linear Systems // IEEE
Trans. Autom. Control. 1989. V. 34. P. 94-97.
11. Wilson D.A., Nekoui M.A., Halikias G.D. An LQR weight selection approach to
the discrete generalized H2 control problem // Int. J. Control. 1998. V. 71. No. 1.
P. 93-101.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 05.10.2019
Принята к публикации 30.01.2020
53