Автоматика и телемеханика, № 8, 2020
© 2020 г. С.Ю. ГОРОДЕЦКИЙ, канд. физ.-мат. наук (gorosyu@gmail.com)
(Нижегородский государственный университет им. Н.И. Лобачевского)
ДИАГОНАЛЬНОЕ ОБОБЩЕНИЕ МЕТОДА DIRECT
НА ЗАДАЧИ С ОГРАНИЧЕНИЯМИ1
Метод DIRECT решает задачи липшицевой глобальной оптимизации в
гиперинтервале при неограниченном диапазоне значений констант Лип-
шица. Предложено расширение принципов DIRECT на задачи с много-
экстремальными ограничениями при использовании в гиперинтервалах
сразу двух измерений функций на концах выбираемых главных диаго-
налей. Представлены вычислительные иллюстрации, включая решение
задачи с разрывами. Выполнен анализ сходимости.
Ключевые слова: глобальная оптимизация, липшицевы функции, метод
DIRECT, многоэкстремальные ограничения, функции с разрывами, двух-
точечная диагональная схема, вычислительные эксперименты.
DOI: 10.31857/S0005231020080073
1. Введение
Статья продолжает исследования, начатые в [1], и посвящена разработке
специального DIRECT-подобного метода условной глобальной оптимизации
для задач
(1)
Q∗
= min Q(x), x ∈ X,
{
}
(2)
X =
x ∈ D = [a,b] ⊂ RN : g(x) ≤ 0
,
где векторы a и b конечны, целевая функция Q и функция ограничения g
могут сложно зависеть от x и считаются многоэкстремальными. Конкрет-
ные требования на них будут указаны далее, но считаем, что минимум в
(1)-(2) существует в обычном или расширенном смысле согласно [1], где
под расширенной понимается трактовка (1)-(2) при X = ∅ как задачи ми-
нимизации невязки g(x) на D. Если ограничений неравенств в (2) несколь-
ко, то в (1)-(2) они заменяются одним ограничением с функцией вида
g(x) = max{g1(x), . . . , gm(x)}. Предполагается алгоритмическая форма зада-
ния функций и существенность времени их вычисления. Это делает оправ-
данным разработку для (1)-(2) методов, основанных на планировании новых
точек испытаний, исходя из принятых требований оптимальности к их раз-
мещению.
Потребность в таких методах возникает в различных областях, включая
разработку систем управления. Действительно, формальное применение со-
временных методов синтеза оптимальных регуляторов по заданным (как пра-
вило, линейным) целевым выходам (например, [2-6]) могут еще не полностью
удовлетворять конструктора-разработчика, так как его еще часто интересует
уменьшение или ограничение содержательных нелинейных показателей ка-
чества (таких как время окончательного вхождения откликов нелинейной
системы в желаемую окрестность входного задающего сигнала, величины
1 Работа выполнена при поддержке научно-образовательного математического центра
“Математика технологий будущего”.
84
перерегулирований и т.п.). Оптимальная настройка таких критериев может
быть выполнена численно в форме решения задач вида (1)-(2) по оставшим-
ся свободным параметрам первичного алгоритма синтеза регулятора. Заме-
тим, что нелинейные критерии в таких задачах часто имеют разрывы либо
за счет эффекта бифуркаций, либо из-за самого вида критерия (например,
разрывы характерны для указанного выше критерия “времени вхождения”).
В [7] использование прямой численной оптимизации продемонстрировано на
модельном примере, причем методов локальной оптимизации оказалось недо-
статочно.
Применение к таким задачам различных методов липшицевой глобальной
оптимизации, использующих оценки констант Липшица по результатам изме-
рений функций (не претендуя на общность, укажем лишь несколько методов
из [8-12]), вызовет неограниченный рост этих оценок при появлении разрывов
в окрестностях глобальных минимумов. Это приведет к вырождению методов
в почти равномерный перебор.
Задачами указанного выше типа еще в период 1978-90 гг. занималась груп-
па в отделе Ю.И. Неймарка в НИИ Прикладной математики и кибернетики
при ГГУ (ныне ННГУ) им. Н.И. Лобачевского. Это были крупные хоздого-
ворные работы по заказу ряда предприятий. Для решения задач вида (1)-(2),
связанных с оптимальной настройкой следящих систем по 4-5 основным па-
раметрам, применялись методы условной глобальной оптимизации с адап-
тивными стохастическими моделями, разработанные в [13] для некоторых
подклассов кусочно-непрерывных функций. Методы основывались на общей
концепции, первоначально предложенной Ю.И. Неймарком в [14, гл. VIII, § 7],
первый вариант реализации которой представлен в [15]. Методы обладали
сходимостью за счет всюду плотного в пределе размещения точек испыта-
ний. Однако в [13] для этих методов были получены аналитические оценки
относительной плотности размещения испытаний, доказывающие существен-
ную неравномерность такого размещения. Недостатком этих методов явля-
лась невозможность их точной вычислительной реализации, а наличие лишь
приближенной.
Методы с несколько похожим поведением могут быть получены на осно-
ве совершенно другого подхода, лежащего в основе оригинального метода
DIRECT (от Dividing Rectangles), предложенного в [16] 1993 г. Этот метод,
хотя и относится к липшицевой оптимизации, в действительности применим
и к задачам с наличием разрывов. Исходная версия метода построена в [16]
для задач на гиперинтервале D без функциональных ограничений
(3)
f∗ = f(x∗) = minf(x), x ∈ D = [a,b] ⊂ RN.
Целевая функция предполагается липшицевой с константой Lf = L. Однако
значение L считается неизвестным, не оценивается и может быть любым чис-
лом из диапазона [0, ∞). DIRECT принципиально отличается от других ме-
тодов липшицевой оптимизации именно отказом от возможного оценивания
и использования конкретных значений константы L. Он относится к компо-
нентным методам, использует адаптивное разбиение начального множества D
на компоненты-гиперинтервалы Di = [ai, bi], в центральных точках ci кото-
рых проводятся измерения функции f.
85
Кратко поясним принцип работы. При известном значении константы
Липшица Lf = L легко вычислить нижнюю оценку значений f для каждого
гиперинтервала с центром в ci
f-i(L) = f-(L,Di) = fi - Ldi/2, fi = f(ci),
где di = diam(Di) = ∥bi - ai∥. В этом случае наиболее приоритетным для но-
вых измерений следует считать гиперинтервал Dt с наименьшим значением
нижней оценки функции. Поскольку в методе DIRECT значение Lf = L неиз-
вестно, он использует иное правило отбора делимых гиперинтервалов Dt. Оно
основано на двух принципах. Первый недоминируемость
{
}
(4)
∃L ∈ [0,∞) : f-(L,Dt) = min f-(L, Di) : i = 1, . . . , Mk
,
где Mk количество гиперинтервалов после k итераций, т.е. недоминируе-
мым является гиперинтервал, являющийся “лучшим” хотя бы при одном из
значений L. Второй достаточная улучшаемость достигнутого минималь-
ного значения целевой функции. Это значит, что хотя бы при некоторых
значениях L из (4) и заданных ηk > 0 должно выполняться условие
{
}
(5)
f-(L,Dt) ≤ fk∗ - ηk, fk∗ = min f(xi) : i = 1,...,nk
,
где xi
точки выполненных измерений, nk их число (в оригинальном
DIRECT всегда nk = Mk).
Гиперинтервалы, удовлетворяющие условиям (4) и (5), называют потенци-
ально оптимальными. Именно такие гиперинтервалы DIRECT выделяет для
деления на очередной итерации. В [16] найдено простое геометрическое пред-
ставление, позволяющее легко находить множество гиперинтервалов Dt, удо-
влетворяющих (4)-(5). Если сопоставить гиперинтервалам Di точки на плос-
кости (d/2, f) с координатами (di/2, fi), где di = ∥bi - ai∥, fi = f(ci), и доба-
вить к ним точку (0, fk∗-ηk), то множеству точек (dt/2, ft) потенциально опти-
мальных гиперинтервалов Dt соответствуют вершины правой-нижней части
границы выпуклой линейной оболочки множества всех точек (di/2, fi), вклю-
чая дополнительную. Для вычислительно эффективного выделения (dt/2, ft)
и, следовательно, нахождения делимых гиперинтервалов Dt используют пра-
вило Грэхема [17].
Для дробления выбранных гиперинтервалов метод применяет схему их де-
ления на три равные части по большему ребру (см. описание в [18]). С исполь-
зованием центральной схемы измерений при делении одного Dt достаточно
провести только два новых измерения f(x) в центрах крайних из трех новых
гиперинтервалов, поскольку в центре среднего результат уже известен.
Заметим, что сама схема деления на три в рекурсивной реализации ис-
пользовалась в глобальной оптимизации для задач (1)-(2) и (3) значительно
раньше, еще в программной разработке Compromiss Solver ВЦ АН СССР
80-х гг. XX в. (предтече метода деления на три является метод деления на
два, который был опубликован в [19]).
К настоящему времени известны различные обобщения DIRECT. Обшир-
ная библиография приведена в [8]. Укажем на некоторые. Оригинальный
DIRECT относительно медленно уточняет найденные оценки решения, в [20]
86
предложена достаточно удачная локально-ориентированная модификация.
В [21] построен, а также описан в [8] более эффективный вариант метода [16]
для задач (3), работающий по диагональной схеме деления на три (в каждом
гиперинтервале проводится не одно, а два измерения на концах специаль-
но ориентируемых главных диагоналей, образующих вместе эффективную
диагональную кривую, построение которой было ранее предложено в [22]).
В [21] кроме двухточечной диагональной схемы измерений применен также
специальный механизм балансировки локальной и глобальной стратегий по-
иска за счет искусственных усечений множеств потенциально оптимальных
гиперинтервалов, что улучшило сходимость к глобальному решению. В [23]
получено нетривиальное обобщение метода DIRECT на задачи с вычислимой
липшицевой производной, константа Липшица которой неизвестна и может
изменяться на промежутке [0, ∞); метод построен для задач (3) с размер-
ностью N = 1. В [24] метод из [23] распространен на многомерные задачи с
использованием специальной нецентральной одноточечной схемы разбиения
множества D в задаче (3). Также в 2001 г. получен концептуально близкий к
DIRECT метод для задач (1)-(2) с несколькими ограничениями, второе из-
дание 2009 г. этой публикации приведено в [18]. Представленный в [18] метод
в отличие от [1] использует специально сконструированный на случай нали-
чия ограничений подход к выделению делимых гиперинтервалов. Принцип
их выделения существенно отличается от оригинального DIRECT.
Заметный интерес к DIRECT-подобным методам привел к проведению
в [25] представительного экспериментального сравнительного исследования
нескольких методов [16, 20, 21] этого семейства в сопоставлении с группой эв-
ристических методов, включая эволюционно-генетические алгоритмы. Тести-
рование проведено на задачах без функциональных ограничений размерности
N = 5, представляющих простой и сложный классы из 100 тестовых функ-
ций GKLS генератора (его описание приведено, например, в [8]). Результаты,
представленные в [25], показали, что при достаточно большом числе изме-
рений nk решение с наибольшей надежностью обеспечивается именно диаго-
нальной реализацией DIRECT, представленной в [21], и особенно на классе
сложных тестовых задач. Это актуализирует разработку диагональной вер-
сии одноточечного варианта метода [1] в задачах с функциональными огра-
ничениями.
В [1] предложено два подхода к обобщению метода DIRECT на задачи с
ограничениями. Оба существенно отличаются от представленного в [18]. Пер-
вый подход сводит исходную задачу с ограничениями к последовательности
задач без ограничений с перестраиваемой целевой функцией. Второй основан
на непосредственном распространении принципов построения DIRECT на за-
дачи с ограничениями. В обоих подходах в [1] применена схема деления на
три с измерением функций в центральных точках (далее измерения функций
задачи называем испытанием). Данная статья обобщает второй из подходов,
предложенных в [1], на двухточечную диагональную схему измерений [22],
использованную в [21]. При этом испытания задачи в гиперинтервалах Dt
проводятся в двух точках at, bt, расположенных на концах одной из главных
диагоналей. Ориентация этой диагонали определяется специальным образом
согласно безызбыточной стратегии разбиения, предложенной в [22] (описа-
87
на также в [8, 21]). Прежде чем перейти к формальной постановке задачи,
поясним основы подхода и терминологию, использованную в [1] и далее при-
меняемую.
Поскольку в задачах с ограничением (1)-(2) добавляется фактор допу-
стимости или недопустимости точек измерений, возможна ситуация пустоты
допустимого множества X. При X = ∅ целью является определение элемен-
тов x∗ из множества X∗ глобальных минимумов задачи. В случае пустоты
(X = ∅), следуя [1], неявно трактуем решение в расширенном смысле, как
определение глобального минимума x∗ невязки в ограничениях (предполага-
ется что этот минимум существует):
g∗ = g(x∗) = ming(x), x ∈ D = [a,b] ⊂ RN.
Множество таких минимумов по-прежнему обозначаем через X∗.
Далее удобно трактовать эту задачу как задачу c добавленным функцио-
нальным ограничением g(x) ≤ 0, заданным фиктивной функцией g(x) ≡ -1.
Заметим, что в (1)-(2) при X = ∅ и наличии допустимых и недопустимых
подмножеств точек различия значений Q(x) на подмножествах с нарушением
ограничений не оказывают влияния на X∗ множество глобальных мини-
мумов задачи. Однако наличие слишком малых значений Q в недопустимых
областях может существенно повлиять на процесс численного решения. По-
этому целевую функцию в (1) при X = ∅ целесообразно заменить функцией
вида
f (x) = max{Q(x); Q∗ - ξ}, ξ ≥ 0.
Поскольку значение в условном глобальном минимуме Q∗ неизвестно, за-
меним его текущей оценкой Q∗k. В результате метод с учетом ограничений
далее будет применен не к решению задачи в форме (1)-(2), а к специально
модифицированной, возникающей из указанных выше замен
(6)
min fk(x), x ∈ Xk,
{
}
(7)
Xk =
x ∈ D = [a,b] ⊂ RN : gk(x) ≤ 0
,
где k
номер итерации. Ее точный вид приведен в разделе 2. Чтобы не
усложнять обозначения, далее будем опускать индексы k у fk и gk, записывая
их как f и g. Предположения о функциях далее примем по отношению к
задаче (6)-(7). Они будут отличаться от требований в [1].
В [1] предположения о функциях следующие: f и g липшицевы в ев-
клидовой норме с неизвестными константами Липшица: Lf = L ∈ [0, ∞) и
Lg ∈ [0,αL) (где α > 0 введенный параметр класса задач). При неограни-
ченном L значение Lg также может быть сколько угодно большим. Принцип
потенциальной оптимальности при отборе делимых на итерации гиперинтер-
валов Dt в [1] заменен на модифицированную потенциальную оптимальность,
которая состоит в одновременном выполнении для Dt трех основных прин-
ципов.
Первый назовем принципом наименьшего нарушения, а именно: из множе-
ства Dk всех гиперинтервалов текущего разбиения выделим на итерации k со-
кращенное подмножествоDk гиперинтервалов, для которых выполнены тре-
бования:
88
∄D′, D′′ ∈Dk, что если с учетом измерений f′ = f(c′), f′′ = f(c′′) выполнено:
(8)
D′ = D′′, diam(D′) = diam(D′′), f′ = f′′, g′ = g(c′)>0, g′′ = g(c′′
)>0,
то g′ = g′′ и, кроме того, если гиперинтервал текущего разбиения D′′ ∈Dk,
а D′ ∈ Dk, то из выполнения для них условий (8) должно следовать неравен-
ство g′ < g′′.
Второй принцип модифицированной недоминируемости. К модифициро-
ванно недоминируемым отнесем все Dt ∈Dk, удовлетворяющие следующим
условиям
∃L ∈ [0,∞):
{
}
(9)
f-(L,Dt) = min f-(L,Di) : Di ∈Dk,∃Lg ∈ [0,αL] : g-(Lg,Di) ≤ 0 ,
(10)
∃Lg ∈ [0,αL] : g-(Lg,Dt
) ≤ 0.
Очевидно, что эти условия прямое обобщение принципа недоминируемости
метода DIRECT, описанного, например, в [8].
Третий принцип достаточная улучшаемость. Пусть fk∗ текущая оценка
минимального значения в (6)-(7) по результатам испытаний, тогда для Dt
изDk при некотором значении L, когда выполнены условия (9)-(10), должно
также для заданного ηk соблюдаться неравенство
(11)
f-(L,Dt) ≤ fk∗ - ηk, ηk
> 0.
Здесь нижние оценки функций имеют вид:
(12)
f-i(L) = f-(L,Di) = fi -Ldi/2; g-i(Lg) = g-(Lg,Di) = gi -Lg di
/2.
В [1] предложен конструктивный алгоритм выделения гиперинтервалов Dt
с указанными свойствами (9)-(11). В примененной для этого технике суще-
ственно использована удобная структура нижней оценки значения ограни-
чения при центральном измерении из (12). Важным оказалось то, что знак
первого элемента gi в g-(Lg, Di) однозначно определяет допустимость или
недопустимость измерения, выполненного в центре Di.
В двухточечном диагональном обобщении
[21] стандартного метода
DIRECT (в задачах без ограничений) использован другой вид нижних оце-
нок функции f. В двухточечной схеме целевая функция f в Di измерена
в двух точках ai, bi на концах выбранной главной диагонали Di. Нижнюю
оценку функции f строим на этой диагонали. При обычных для DIRECT
предположениях о липшицевости f(x) с константой Lf = L ∈ [0, ∞) получим
минимальное значение оценки на диагонали
fai + fbi
di
f-i(L) = f-(L,Di) =
-L
2
2
Такой вид оценки не подходит для функции g(x) при наличии ограниче-
ний, если строить двухточечное обобщение метода из [1]. Действительно, в
оценке такого вида для g(x) первым элементом будет (gai + gbi)/2. Очевид-
но, знак этой суммы однозначно не выделяет ситуации наличия допустимой
точки среди двух испытаний в ai, bi.
89
Поэтому в данной статье применен другой вид нижних оценок, вытекаю-
щий из измененных предположений относительно свойств f и g в задаче
(6)-(7). Поясним это на примере g(x). Пусть получены измерения gai, gbi на
концах ai, bi главной диагонали длины di гиперинтервала Di. Вычислим зна-
чение Lgi = |gai - gbi|/di. Очевидно, что в Di должно выполняться неравенство
Lg ≥ Lgi. Примем значение Lg для Di в виде Lg = Lgi + ΔLg, где ΔLg будем
считать одинаковым для всех гиперинтервалов. Тогда нижняя оценка значе-
ний функции g на диагонали от ai до bi примет вид
gai + gbi
di
g-i(ΔLg) = g-(ΔLg,Di) =
- (Lgi + ΔLg)di
= Gi - ΔLg
;
(13)
2
2
2
ΔLg ≥ 0,
где Gi = min{gai; gbi}. При этом знак Gi однозначно определит наличие допу-
стимого испытания на концах используемой диагонали. Это позволит непо-
средственно обобщить результаты [1] на случай двухточечных диагональных
измерений.
2. Предварительные замечания и постановка задачи
2.1. Преобразование исходной задачи
Пусть выполнено k итераций некоторого метода и проведено nk испыта-
ний (измерений функций задачи) в точках xi ∈ D с сохранением в памяти
значений Qi, gi (i = 1, . . . , nk). Определим рекордное значение Q∗k в (1)-(2):
{
min{Qi : gi ≤ 0, i = 1, . . . , nk}, если ∃ gi ≤ 0,
(14)
Q∗k =
+∞,
если ∀i = 1, . . . , nk : gi > 0.
Если еще не найдено ни одной допустимой точки, значение Q∗k = +∞, и
с учетом расширенной трактовки решения выполним переход от решения
(1)-(2) к задаче поиска минимума невязки g(x) на D до тех пор, пока не
встретится первая допустимая точка. Для единообразного рассмотрения ал-
горитмов решения перейдем от исходной формы задачи (1)-(2) к ее изме-
ненному представлению в форме (6)-(7), где функции fk(x) и gk(x) имеют
вид:
{ max{Q(x);Q∗
- ξk}, Q∗k = +∞,
k
(15)
fk(x) =
g(x),
Q∗k = +∞;
{ g(x), Q∗k = +∞,
(16)
gk(x) =
-1, Q∗k = +∞.
При проведении испытаний этой задачи в точках xi вычисляются и со-
храняются значения Qi и gi исходной задачи, а величины вспомогательных
функций fk(xi) и gk(xi) восстанавливаются согласно (15), (16) по сохранив-
шимся в памяти результатам измерений исходных функций. Численный ме-
тод решает задачу (6)-(7), (15), (16), которая на итерациях сама изменяет
свою структуру в зависимости от рекордного значения (14). Такая форма
90
представления задачи удобна для построения метода. Текущее минимальное
значение вспомогательной целевой функции (15) обозначим
{
}
(17)
fk∗ = min
fk(xi) : gk(xi) ≤ 0, i = 1,... ,nk
Значение fk∗ всегда конечно. Далее, как уже было указано выше, обычно
будем опускать у вспомогательных функций fk и gk нижний индекс k.
2.2. Использование безызбыточной диагональной стратегии разбиения
Поясним правила размещения точек испытаний при использовании безыз-
быточной диагональной стратегии разбиения [22] (см. также [8]). Перед нача-
лом поиска проводим два начальных испытания в вершинах a и b исходного
гиперинтервала D, соответствующих минимальным и максимальным значе-
ниям координат. В последующем каждый из делимых гиперинтервалов раз-
деляется на три равные части по первому из его больших ребер. У очередно-
го делимого гиперинтервала Dt перед делением всегда имеется пара вершин
at и bt (назовем их активными), в которых испытания уже проведены. Эти
вершины лежат на одной из главных диагоналей (далее будем называть ее
активной). Эти диагонали могут иметь разные ориентации. Пусть r длина
делимого ребра, а e нормирова(ный в)ктор, направленный из вершины at
вдоль этого ребра так, чтобы e⊤
bt - at
> 0. Согласно [22] при делении Dt
выбираются две точки u и v, в которых могут проводиться новые испытания:
2
2
u=at +
r e;
v=bt -
r e.
3
3
Три новых гиперинтервала порождаются из Dt по следующим парам ак-
тивных вершин (см. рис. 1): at и v, v и u, u и bt.
В [22] показано, что при описанном способе выбора точек новых измерений
некоторые из них могут являться активными и для других смежных гипе-
ринтервалов (см. правую часть рис. 1). Поэтому в некоторых из новых точек
u или v испытания задачи могут быть уже проведены ранее и повторно их
Dt
3
2
bt
at
D
S
D3
v
6
v
D2
-e
D4
e
5
u
u
bt
D
1
at
1
4
Рис. 1. Слева выбор новых точек измерений и ориентаций активных диа-
гоналей при делении на три выбранного гиперинтервала по безызбыточной
диагональной стратегии в R3; справа пример возможного разбиения на-
чального D в R2: при делении D2 новая точка u совпала с точкой прежнего
испытания с номером 5.
91
выполнять не следует можно извлечь готовые результаты из памяти, эко-
номя на количестве испытаний. Быстрое выполнение операции поиска для
последующего извлечения обеспечено созданием специально организованной
структуры хранения результатов испытаний.
2.3. Новая модель поведения функций задачи и диагональное обобщение
DIRECT-подобного принципа отбора делимых гиперинтервалов
с учетом ограничений
{
}Mk
Пусть на итерации k имеется текущее разбиение Dk =
Dk
началь-
i i=1
ного множества D на гиперинтервалы Di = Dki, полученное по безызбыточ-
ной диагональной стратегии разбиения [8, 22]. В каждом Di, в вершинах
ai и bi, оканчивающих активную диагональ, проведены испытания задачи.
Пусть fai = f(ai), fbi = f(bi), gai = g(ai), gbi = g(bi)
результаты испытаний.
Введем обозначения:
(18)
Li = Lfi =
fai - fbi /di, Lg
=
gai - gbi /di.
i
Примем, что функции f и g, определяемые соотношениями (15) и (16),
липшицевы в D с нормой ∥·∥ и константами Lf = L и Lg, причем в гипер-
интервале Di значения этих констант с использованием (18) представимы в
виде:
L = Li + ΔL, Lg = Lgi + ΔLg.
Приращения ΔL и ΔLg неотрицательны и одинаковы для всех гиперинтер-
валов разбиения. Таким образом, гиперинтервалам разбиения назначаются
разные по величине минимально возможные значения констант и одинаковые
приращения к ним. Введем следующие предположения. Считаем, что прира-
щение ΔL неизвестно и его величина может быть сколь угодно большой, т.е.
ΔL ∈ [0,∞); значение ΔLg также неизвестно, но ΔLg ∈ [0,α ΔL], где α > 0
постоянный параметр метода. Заметим, что указанные выше предположения
применительно к функции f впервые были использованы и экспериментально
исследованы в [26] при построении методов для задач без ограничений в R1.
Выполнив преобразования, аналогичные (13), получим следующий вид ми-
нимальных значений нижних оценок функций f и g на активных диагоналях
гиперинтервалов Di:
f-i(ΔL) = f-(ΔL,Di) = Fi - ΔLdi/2,
(19)
g-i(ΔLg) = g-(ΔLg,Di) = Gi - ΔLg di/2,
{
}
{
}
(20)
;fb
,
Fi = min
i
i
Gi = min gi; gi
Значения Fi и Gi из (20) назовем базовыми характеристиками функций
f и g на гиперинтервале Di. Следует обратить внимание на то, что нижние
оценки (19), (20) двухточечной диагональной схемы отличаются от анало-
гичных оценок центральной схемы заменой прежних значений fi, L, gi, Lg
новыми Fi, ΔL, Gi, ΔLg. Это позволяет доказать ряд фактов и разработать
алгоритмы, близкие к полученным в [1].
92
Введем необходимые определения.
Определение 1. Подмножеством гиперинтервалов с наименьшим на-
рушением (ограничений) назовем подмножествоDk множества всех гипер-
интервалов текущего разбиения Dk, в которое из каждой группы гиперин-
тервалов {D} ⊆ Dk одинакового диаметра, с одинаковыми значениями базо-
вых характеристик F и положительными значениями G базовых характе-
ристик ограничений включены только гиперинтервалы с наименьшим зна-
чением G в этой группе.
Проводимое сокращение Dk до подмножестваDk является значимым при
решении преобразованной задачи (6)-(7), когда уже обнаружены допустимые
точки, т.е. Q∗k = +∞. Именно в этом случае в силу (15)-(16) может возни-
кать значительное количество гиперинтервалов Di с одинаковыми значения-
ми Fi = Q∗k - ξk и Gi > 0.
Определение 2. Гиперинтервал Dt ∈ Dk назовем модифицировано
недоминируемым на итерации k, если Dt ∈Dk и ∃ ΔL ∈ [0,∞) такое, что
для нижних оценок на активных диагоналях из (19) функций fk(x), gk(x) из
(15)-(16) выполнено:
f-(ΔL,Dt) =
{
}
(21)
= min f-(ΔL,Di) : Di ∈ Dk, ∃ ΔLg ∈ [0,α ΔL] : g-(ΔLg,Di) ≤ 0 ,
(22)
∃ ΔLg ∈ [0,α ΔL] : g-(ΔLg,Dt
) ≤ 0.
Определение 3. Гиперинтервал Dt назовем модифицированно потен-
циально оптимальным (на итерации k), если он модифицированно недоми-
нируемый на этой итерации и хотя бы для некоторых ΔL, при которых
для него соблюдены требования (21)-(22), выполняется также условие до-
статочной улучшаемости с заданным ηk > 0 и fk∗ из (17):
(23)
f-(ΔL,Dt) ≤ fk∗ - ηk.
Следуя [1], сформулируем простое утверждение, позволяющее записать
требования (21)-(22) в эквивалентной, но более простой форме.
Утверждение 1 (об эквивалентности). Условия (21)-(22) модифици-
рованной недоминируемости Dt ∈Dk в диапазоне ΔL ∈ [ΔL′,ΔL′′) эквива-
лентны следующим условиям: ∃ ΔL ∈ [ΔL′, ΔL′′) такое, что
{
}
f-(ΔL,Dt) = min f-(ΔL,Di) : Di ∈Dk,g-(αΔL,Di) ≤ 0 ;
(24)
g-(αΔL,Dt) ≤ 0.
Доказательство утверждения приведено в Приложении.
Заметим, что по отношению к определению 2 утверждение применяем,
положив [ΔL′, ΔL′′) = [0, ∞).
Основная задача ставится следующим образом. Для получения диагональ-
ного варианта DIRECT-подобного метода условной глобальной оптимизации
требуется определить подходы к построению и структуру алгоритмов выде-
93
ления на итерации k подмножества (обозначим егоDk) всех модифициро-
ванно потенциально оптимальных гиперинтервалов с учетом упрощающего
утверждения 1. Также необходимо провести анализ сходимости построенно-
го метода и выполнить его экспериментальную апробацию. В данной статье
описаны указанные выше подходы к обработке информации в алгоритмах
формированияDk и их структура, выполнен анализ сходимости, а также
представлены вычислительные иллюстрации работы метода на двумерных
задачах. Детальное описание и аналитическое обоснование алгоритмов выде-
ленияDk, а также вычислительный эксперимент на задачах разных размер-
ностей не являются целью данной статьи, а составляют предмет отдельной
публикации.
3. О построении алгоритмов отбора делимых гиперинтервалов
при двухточечной диагональной схеме измерений
МножествоDk гиперинтервалов, делимых на текущей k-й итерации, яв-
ляется множеством всех модифицированно потенциально оптимальных гипе-
ринтервалов. Поясним правила их выделения и реализующие их алгоритмы,
используя иллюстративные примеры.
Заметим, что в обычном методе DIRECT для задач без ограничений от-
бор делимых гиперинтервалов происходит сравнением на плоскости (d/2, f)
их изображающих точек, где первая координата половина диаметра ги-
перинтервала, а вторая значение целевой функции в его центре. При на-
личии ограничений и использовании одноточечной центральной схемы ги-
перинтервалы Di в [1] представлены трехмерными изображающими точками
(di/2, fi, gi), включающими результат вычисления функций f и g в центре Di.
В рассматриваемой двухточечной схеме значения fi, gi в центральных точ-
ках заменим базовыми характеристиками этих функций Fi, Gi из (20). После
такой замены выделение искомого подмножестваDk может быть выполнено
по двухэтапной процедуре, похожей на описанную в [1].
Поясним характер возникающей при этом обработки накопленной по-
исковой информации. На первом этапе на множестве трехмерных точек
(di/2, Fi, Gi) выделим подмножества, соответствующие гиперинтервалам Ddi
F
1
2
3
4
DLd DLd DLd DLd DLd = +¥
fk*- xk
5
0
DL
G
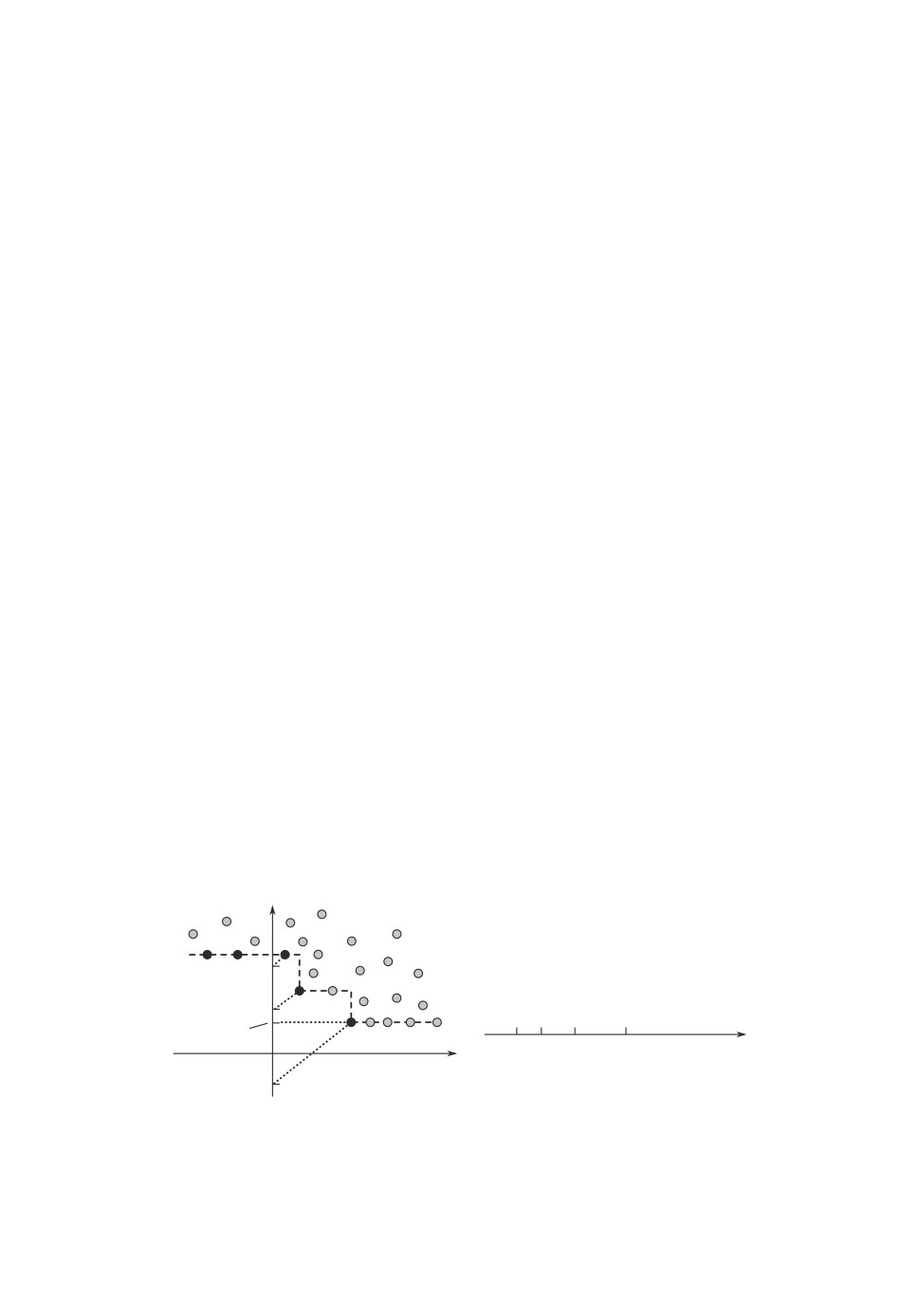
Рис. 2. Слева набор точек (Gj , Fj ), соответствующих d-слою гипер-
интервалов с diam(Dj ) = d, черные точки отвечают группам {Dds} ото-
бранных гиперинтервалов; справа порождаемые для {Dds} границы
диапазонов [ΔLds, ΔLds+1) приращений ΔL: значение s = 0 соответствует
точкам 1 и 2, s = 1, 2, 3 соответствуют точкам 3, 4, 5.
94
одинакового диаметра с di = d (назовем такие подмножества d-слоями).
В каждом d-слое выполним предварительный отбор гиперинтервалов за счет
сравнения соответствующих им точек на плоскости (G, F ) при выбранном d.
Сравнения выполним так, чтобы выделенные в результате отбора группы
гиперинтервалов (обозначим их {Dds}, s = 0, . . . , S(d)) удовлетворяли опре-
делениям 1 и 2, но только в пределах множества гиперинтервалов своего
d-слоя. Проводя рассуждения аналогично [1], но с учетом особенностей диа-
гональных испытаний, можно показать, что в достаточно общей ситуации,
представленной на рис. 2 слева, отобранными на плоскости (G, F ) будут точ-
ки, выделенные черным. Аналогично [1] для групп гиперинтервалов {Dds},
соответствующих выделенным точкам, наборы значений ΔL, при которых
дляDds в пределах d-слоя выполнены условия (21), (22), образуют диапа-
зоны вида [ΔLds, ΔLds+1), где при Gs ≤ 0 значение ΔLds = 0, а при Gs > 0
ΔLds = 2Gs/(αd). В последнем диапазоне ΔLdS(d)+1 = +∞. Показанные на
рис. 2 наклонные точечные линии, имеют коэффициент наклона 1/α, где α
введенный ранее параметр класса функций ограничений. Прересечения этих
линий с осью F порождают указанные значения ΔLds, при которых впервые
выполняются условия неположительности g-(α ΔLds,Dds) ≤ 0, а ординаты то-
чек пересечения совпадают с f-(ΔLds,Dds). Легко видеть, что в каждом d-слое
будет существовать хотя бы одна точка, соответствующая группе отбираемых
гиперинтервалов.
В начале второго этапа происходит объединение множеств значений ΔLds
по всем d и по всем s с формированием общего упорядоченного ряда значений:
(25)
0 ≤ ΔL1 < ΔL2 < ... < ΔLmk < ΔLmk+1
= +∞.
Далее, при продолжении второго этапа обработки для каждого промежут-
ка [ΔLj, ΔLj+1) приращений ΔL выделяются для различных d-слоев из групп
{Dds}S(d)s=0 отобранных гиперинтервалов те, для которых не пусто пересечение:
[ΔLj , ΔLj+1) ∩ [ΔLds, ΔLds+1) = ∅.
Обозначим множество таких гиперинтервалов черезOjk, а его элементы че-
резDjk. Каждое из множествOjk отдельно представим набором изображаю-
щих точек с координатами (d/2, F ).
Заметим, что аналогично геометрической интерпретации правил метода
DIRECT, минимальное значение нижней оценки функции fk(x) на актив-
ной диагонали одного из гиперинтерваловDjk, соответствующего некоторой
изображающей точке (d/2, F ), можно получить как ординату пересечения с
осью F прямой, проведенной с коэффициентом наклона ΔL через эту изобра-
жающую точку. В оригинальном методе DIRECT сравнение гиперинтервалов
происходит по значениям аналогичных нижних оценок для целевой функ-
ции при условии, что диапазон изменения константы Липшица есть [0, +∞).
В рассматриваемом случае диапазон изменения ΔL ограничен промежутком
[ΔLj, ΔLj+1), что требует новых алгоритмов обработки. Их точное описание
и обоснование выходят за рамки данной статьи.
95
F
p2
p1
p3
p8
4
p
p6
p5
f k - hk
*
p7
p9
1
3
9
d/2
Dj
Рис. 3. Пример отбора в множество
гиперинтервалов, делимых на k-й ите-
k
Oj
рации, из множества
, сформированного для значений ΔL из [ΔLj, ΔLj+1);
k
Oj
если гиперинтервалам из
соответствует множество точек Pjk = {p1, . . . , p9},
k
то отобранным для деления гиперинтервалам будут отвечать точки p9; p7; p4,
выделенные черным.
На полученном множестве точек эти алгоритмы должны проводить допол-
нительный отбор так, чтобы для гиперинтервалов, соответствующих остав-
шимся точкам, оказались выполнены определения 2 и 3, причем условия из
определения 2 должны выполняться для отобранных гиперинтервалов толь-
ко в пределах множестваOjk и только для значений ΔL из [ΔLj, ΔLj+1).
Пример отбора показан на рис. 3. Он иллюстрирует результат выделения
подмножестваDjk изOjk на конкретном примере. Вертикальные точечные
линии на рис. 3 соответствуют диаметрам возможных существующих d-слоев
после 9 итераций на примере исходного множества в виде некоторого четы-
рехмерного гиперинтервала. Границам промежутка [ΔLj , ΔLj+1) на рисунке
соответствуют коэффициенты наклона сплошных линий, проведенных через
точки. Наклонные штриховые линии отражают процесс отбора. Черным вы-
делены те изображающие точки, которым соответствуют гиперинтервалы,
отобранные в этом примере в множествоDjk для их последующего включе-
ния в полный наборDk гиперинтервалов, делимых на итерации k.
Повторяя процедуру выделенияDjk для j = 1, . . . , mk и включая (с устра-
нением повторов) все отобранные таким образом гиперинтервалы в искомое
множествоDk, получим полный наборDk гиперинтервалов, делимых на ша-
ге. Нетрудно видеть, что полученноеDk совпадает со множеством всех мо-
дифицированно потенциально оптимальных на итерации k гиперинтервалов.
Лемма 1 (о наибольшем гиперинтервале). Построенное множество ги-
перинтерваловDk всегда содержит хотя бы один гиперинтервал наиболь-
шего диаметра из гиперинтервалов текущего разбиения Dk.
Лемма используется при доказательстве теоремы о сходимости в разделе 4.
Доказательства леммы и последующей теоремы приведены в Приложении.
96
4. Структурное описание диагонального метода с учетом ограничений,
анализ сходимости
4.1. Описание построенного метода
На каждой итерации метод должен выделить очередной наборDk дели-
мых гиперинтервалов Dt, реализуя принципы, предложенные в разделе 2.
Краткое описание структуры возникающей при этом обработки накопленной
поисковой информации приведено в разделе 3. Алгоритмы этой обработки
являются центральной частью построенного метода и в отличие от [1] учиты-
вают специфику двухточечных диагональных измерений в гиперинтервалах.
Из материала разделов 2 и 3 следует, что выполнение алгоритмов обработ-
ки зависит от значения ряда величин, а именно: ηk из условия (23); α
параметр, введенный в начале подраздела 2.3 при описании требований к
диапазону значений ΔLg приращений константы Липшица функции огра-
ничения; а также ξk из (15). Значения ηk и ξk выберем пропорциональными
некоторой величине Δfk, которая в [1] была названа базовым значением це-
левой функции решаемой задачи, а именно примем: ηk = Δfkε; ξk = Δfkδ.
Способ вычисления Δfk предложен и подробно описан в [1, раздел 3] (в под-
разделе Новое базовое значение). Единственное отличие, применительно к
рассматриваемому диагональному варианту метода, состоит в том, что здесь
для вычисления Δfk вместо набора измерений целевой функции в центрах
гиперинтервалов текущего разбиения используется набор имеющихся изме-
рений целевой функции fk(x) из (15) на концах активных диагоналей этих
гиперинтервалов. При вычислении Δfk каждое такое измерение учитывается
только один раз, хотя почти каждая точка измерения входит в несколько ги-
перинтервалов. Значение Δfk содержательно можно трактовать как грубую
оценку разности fµk - fk∗, где fk∗ определяется в (17), а fµk значение, при
котором относительная мера множества точек {x ∈ D : fk(x) ≤ fµk} в D равна
заданной величине µ из интервала (0, 1). fµk формируется в [1] приближенно
по результатам проведенных испытаний. Принятый в [1] алгоритм вычисле-
ния Δfk предполагает задание еще одного параметра n, который определяет
пороговое число измерений. А именно если после очередной k-й итерации
число измерений nk впервые превысит заданное n (обозначим этот номер k
черезk), то после этой итерации происходит обновление Δf̃, и далее при
k
всех k >k используется Δfk = Δf̃
k
Таким образом, имеем набор параметров: µ, n, а также ε, α, δ. Параметры ε
и δ всегда неотрицательны и влияют на работу метода следующим образом.
Увеличение ε, как правило, увеличивает равномерность размещения точек
измерений, а его уменьшение увеличивает тенденцию к делению гиперинтер-
валов малого диаметра. Уменьшение δ, как правило, приводит к уменьшению
доли измерений в недопустимых областях, а его увеличение повышает долю
недопустимых измерений. Метод управляет этими тенденциями за счет ис-
пользования трех наборов значений ε, α, δ. Набор ε0, α0, δ0 метод применяет
на первой стадии поиска, пока число измерений меньше заданного n, а далее
использует два других (ε1, α1, δ1, либо ε2, α2, δ2), попеременно применяя их
в зависимости от номера итерации k. Если k кратно дополнительному пара-
метру K, применяется первый набор, а если не кратно, второй. Значения
97
параметров двух последних наборов, как правило, выбираются так, чтобы
первый соответствовал стратегии уточнения найденных оценок решения, а
второй поиску в менее исследованных областях. Начальный набор должен
способствовать достаточной равномерности размещения начальных точек.
Одноточечный метод, построенный в [1], имеет маркировку ExDIR (от
DIRECT Extention), его двухточечное диагональное обобщение обозначим
как ExDIR-diag.
Поскольку DIRECT-подобные методы не оценивают константы Липшица,
останов по точности невозможен, поэтому указывают ресурс по количеству
испытаний.
Алгоритм 1 (принципиальное описание метода ExDIR-diag).
1. Задаем параметры µ, n, K, εs, αs, δs, (s = 0, 1, 2) и nmax максимальное
количество испытаний.
2. Проводим два начальных испытания в вершинах a и b исходного гипе-
ринтервала D из (1), соответствующих минимальным и максимальным зна-
чениям координат, полагаем номер итерации k = 1, количество испытаний
nk = 2 и множество гиперинтервалов Dk = {D}, количество гиперинтервалов
Mk = 1.
3. С учетом проведенных на k-й итерации испытаний обновляем Q∗k из (14),
при необходимости корректируем текущий вид функций (15), (16) решае-
мой задачи (6)-(7). Если задача изменилась, пересчитываем значения функ-
ций fk(x) и gk(x) на концах ai, bi активных диагоналей всех гиперинтерва-
лов Di текущего множества Dk гиперинтервалов. При этом функции исход-
ной задачи повторно не вычисляются, используются их ранее сохраненные в
памяти значения. При необходимости корректируем fk∗ из (17) и x∗k точ-
ку испытания, соответствующую значению fk∗. Если одинаковое рекордное
значение fk∗ наблюдается в точках нескольких испытаний, то в качестве x∗k
принимаем последнее. Вычисляем базовое значение Δfk согласно [1] с учетом
замечаний и описания, приведенного выше.
4. Если nk ≥ nmax, то останавливаем поиск и выдаем значения Q∗k, fk∗,
x∗k в качестве оценки решения. При nk < nmax, в зависимости от превыше-
ния числом испытаний nk порогового значения n и от кратности k значению
K выбираем, как описано выше, один из трех наборов значений εs, αs, δs,
(s = 0, 1, 2) в качестве параметров ε, α, δ.
5. Выполняя двухэтапную обработку информации, структурно описанную
в разделе 3, из множества Dk всех гиперинтервалов разбиения выделяем под-
множествоDk всех модифицированно потенциально оптимальных.
6. Полагаем nk+1 = nk. Для каждого гиперинтервалаDkt изDk согласно
описанию из подраздела 2.2 определяем потенциальные точки новых испы-
таний ut и vt для его деления на три по большему ребру. Для каждой из
этих двух точек выполняем поиск в базе проведенных испытаний. В точках
ut и vt, не найденных в базе, проводим новые испытания, увеличивая при
этом счетчик nk+1. Каждый гиперинтервалDkt разделяем на три по больше-
му ребру,Dkt исключаем из множества Dk, добавляем в него три новых гипе-
ринтервала. Полагаем Mk+1 = Mk + 2. Принимаем измененное множество Dk
в качестве Dk+1. Полагаем k = k + 1 и переходим к выполнению п. 3.
98
4.2. Анализ сходимости
Исследование сходимости метода ExDIR-diag проведем при более слабых
предположениях о свойствах функций задачи (1)-(2), чем было принято при
построении метода. Как и в [1], решение исходной задачи (1)-(2) понимаем
в расширенном смысле. А именно если в (2) допустимое множество X = ∅,
то предполагаем существование глобального минимума в (1)-(2), целью ре-
шения считаем определение элементов x∗ из множества X∗ глобальных ми-
нимумов задачи: X∗ ⊆ X, x∗ ∈ X∗, Q(x∗) = Q∗. В случае пустоты допустимо-
го множества (X = ∅) неявно трактуем решение для (1)-(2) в расширенном
смысле как обеспечение минимума невязки в ограничениях, предполагая, что
минимум существует:
g∗ = ming(x), x ∈ D = [a,b] ⊂ RN.
При этом целью решения задачи (1)-(2) при X = ∅ является определение
элементов x∗ из множества X∗, которое в данном случае понимается как
множество глобальных минимумов g(x) на D: X∗ ⊆ D, x∗ ∈ X∗, g(x∗) = g∗.
При анализе сходимости не будем предполагать липшицевость функций,
но наложим следующие дополнительные требования.
А. Значения функций Q и g ограничены на D.
В. При непустоте допустимого множества X для всякого решения x∗ суще-
ствует открытое подмножество χ ⊂ X, замыкание которого χ содержит x∗, а
функции Q и g непрерывны на этом замыкании. Если X = ∅, то для всякого
расширенного решения x∗ существует открытое подмножество χ ⊂ D, замы-
кание которого χ содержит x∗, а функция g непрерывна на этом замыкании.
С. Множество решений X∗, понимаемое в обычном или расширенном ва-
рианте, замкнуто и является глобально устойчивым (по аналогии с термино-
логией [27]) в том смысле, что для любой минимизирующей последователь-
ности xk, т.е. последовательности, удовлетворяющей при X = ∅ условиям
xk ∈ X, Q(xk) → Q∗ при k → ∞, а при X = ∅ условиям xk ∈ D, g(xk) → g∗
при k → ∞, выполняется требование ρ(xk, X∗) → 0, где
ρ(xk, X∗) = inf {∥xk - x∗∥ : x∗ ∈ X∗}.
Теорема 1 (о сходимости). Пусть для задачи с ограничениями неравен-
ствами (1)-(2), решение которой понимается в расширенном смысле, вы-
полняются требования А, В и С, тогда двухточечный диагональный метод
ExDIR-diag, расширяющий принципы метода DIRECT на задачи с ограниче-
ниями, порождает на множестве поиска D последовательность испыта-
ний со всюду плотным в пределе характером размещения, при этом все пре-
дельные точки последовательности оценок решения x∗k принадлежат мно-
жеству решений X∗.
Заметим, что всюду плотный характер размещения точек испытаний не
означает их равномерного расположения на множестве поиска D. Хотя для
DIRECT-подобных методов, в отличие от методов из [13], до сих пор не по-
лучено аналитических оценок относительной плотности размещения испы-
таний, приведенные в разделе 5 вычислительные иллюстрации показывают
существенно неравномерное распределение точек измерений в зависимости
от поведения функций Q и g задачи (1)-(2). При достаточно большом коли-
99
честве измерений наиболее высокая концентрация испытаний наблюдается в
окрестностях глобальных минимумов.
5. Вычислительные иллюстрации
В качестве вычислительных иллюстраций работы построенного двухто-
чечного диагонального метода ExDIR-diag приведем примеры размещения
испытаний на трех задачах с номерами № 1, № 3 и № 7 из тестового набо-
ра, использованного в [1]. Там же представлены постановки и описания этих
задач. Здесь укажем лишь общие характеристики: число ограничений нера-
венств m, число условных локальных минимумов nloc, параметры глобально-
го минимума Q∗ и x∗, Qo наименьшее значение в локальном минимуме, не
совпадающем с глобальным.
В задаче № 1 m = 3 и функции ограничений сильно разномасштабные,
nloc = 5, Q∗ = -1,48968, x∗ = (0,94248;0,94526), Qo = -1,0; в задаче №3
m = 1, nloc = 8, Q∗ = -0,81911, x∗ = (1,30499;2,27249), Qo = -0,81814, эта за-
дача характеризуется малым отличием в значениях глобального и следующе-
го по значению локального минимума (Qo - Q∗ = 0,00097).
Численные эксперименты проведены с использованием двух групп зна-
чений параметров, которые для удобства обозначены E1 и E3. Набор па-
раметров E1 включает: µ = 0,3, n = 100, K = 2; ε0 = 0,5, α0 = 1,0, δ0 = 0,0;
ε1 = 0,0001, α1 = 0,5, δ1 = 0,1; ε2 = 0,1, α2 = 2,0, δ2 = 0,1. Набор E3 отлича-
ется изменением части параметров: ε1 = 0,00001, α1 = 0,5, δ1 = 0,01; ε2 = 0,1,
α2 = 2,0, δ2 = 0,01.
Представленные на рис. 4 и рис. 5 результаты тестирования соответствуют
следующей постановке эксперимента.
Для задачи вводим желаемую погрешность ǫ определения глобально ми-
нимального значения Q∗. Вычисления проводим до первого испытания, в ре-
зультате которого текущая оценка Q∗k значения Q∗ окажется меньшей или
равной Q∗ + ǫ. В этот момент определяем n∗ количество проведенных испы-
таний, k∗ номер итерации и M∗ количество гиперинтервалов. Значения
n∗, k∗ и M∗ указываем наряду с видами размещения испытаний. Допустимое
множество на всех рисунках выделено серым. Результаты рис. 4 показывают
размещения испытаний в одноточечном методе ExDIR из [1] в сравнениии с
его диагональным обобщением ExDIR-diag для задачи № 1. Использована
группа параметров E1. Размещение выглядит более рациональным у диаго-
нального варианта метода (на рисунке справа). Для достижения точности
ǫ = 0,002 по значению функции ему понадобилось провести n∗ = 111 испы-
таний (выполнено k∗ = 15 итераций, M∗ = 157). У метода ExDIR испытаний
n∗ = 219 за k∗ = 43 итерации, M∗ = n∗. Число делимых в среднем на итера-
ции гиперинтервалов для ExDIR-diag оказалось примерно в два раза больше,
чем у ExDIR.
В задаче № 3 малое отличие значений глобального и следующего по глу-
бине локального минимума увеличивает число испытаний, необходимых для
определения глобального минимума с заданной точностью ǫ = 0,00051. Мето-
ду ExDIR потребовалось n∗ = 577 испытаний (выполнена k∗ = 61 итерация,
M∗ = n∗), а диагональному методу ExDIR-diag потребовалось n∗ = 369 испы-
100
3,00
2,60
2,10
1,70
1,20
0,78
0,33
-0,33
-0,56
-1,00
0
0,44 0,89 1,30 1,80 2,20 2,70 3,10 3,60 4,00
0
0,44
0,89 1,30 1,80 2,20 2,70 3,10 3,60 4,00
Рис. 4. Размещение испытаний методами ExDIR (слева) и ExDIR-diag (справа)
в задаче № 1 до момента определения решения с погрешностью ǫ = 0,002.
6,3
5,6
4,9
4,2
3,5
2,8
2,1
1,4
0,7
0
0
0,7
1,4
2,1
2,8
3,5
4,2
4,9
5,6
6,3
0
0,7
1,4
2,1
2,8 3,5 4,2 4,9
5,6
6,3
Рис. 5. Размещение испытаний в ExDIR-diag до момента получения решения
с погрешностью ǫ = 0,00051 в задаче № 3 без разрыва (слева) и задаче № 7 с
разрывом.
таний (выполнено k∗ = 30 итераций, M∗ = 547). В обоих методах использова-
лась группа параметров E3. Размещение испытаний в диагональном методе
ExDIR-diag показано на рис. 5 слева.
Дополнительно на рис. 5 справа представлена задача № 7 из [1] для ил-
люстрации влияния разрывов на поведение метода. Она отличается от за-
дачи № 3 только добавленным разрывом в целевую функцию Q(x) вдоль
прямой x2 = 2,3 за счет вычитания из Q(x) значения Δ = 1 на множестве
точек с x2 ≤ 2,3. Линия разрыва проходит в непосредственной близости от
точки глобального минимума с x∗2 = 2,27249. Общие характеристики зада-
101
чи № 7 отличаются от задачи № 3 лишь тем, что для нее Q∗ = -1,81911 и
Qo = -1,81814.
Поскольку метод ExDIR-diag не оценивает константы Липшица, то несмот-
ря на разрывы в областях концентрации точек не происходит вырождения
этого метода в равномерный перебор. Видно, что метод ExDIR-diag на за-
даче с разрывом сохраняет целесообразное поведение. В процессе решения
правильное распознавание области глобального минимума происходит доста-
точно быстро, однако наличие разрывов заметно замедляет уточнение най-
денного решения. В результате для достижения той же точности ǫ = 0,00051
методу потребовалось n∗ = 707 испытаний (выполнено k∗ = 53 итерации,
M∗ = 1137). Вычисления проведены с группой параметров E1.
Следует отметить, что представленную в статье версию двухточечного
диагонального метода следует рассматривать как базовую, которую можно
использовать для его дальнейшего развития.
6. Заключение
Оригинальный метод DIRECT, построенный в [16] для решения задач
многоэкстремальной оптимизации без функциональных ограничений, при-
влекателен тем, что сохраняет способность поиска глобального экстремума
при наличии конечных (умеренной величины) разрывов целевой функции
в непосредственной близости от решений. Эта особенность связана со специ-
альными принципами отбора делимых гиперинтервалов, входящих в текущее
покрытие множества поиска. Эти принципы не используют оценок констант
Липшица, хотя липшицевость целевой функции (при неограниченности диа-
пазона возможных значений константы) предполагается.
В данной статье впервые предложено обобщение принципов DIRECT с уче-
том сразу двух дополнительных факторов: наличия функциональных ограни-
чений и использования испытаний функций в гиперинтервале не в одной цен-
тральной точке, а в двух на концах специально ориентируемых главных диа-
гоналей. Для одновременного учета пар измерений потребовалось изменить
традиционные для DIRECT предположения о свойствах функций решаемой
задачи. Введенные обобщенные принципы отбора можно рассматривать как
прямое развитие и расширение принципов построения метода DIRECT. В ста-
тье показана лишь структура двухэтапной обработки информации при отбо-
ре делимых гиперинтервалов. Детальное описание и обоснование алгоритмов
реализации обобщенных принципов требует отдельной публикации.
Проведенный анализ показывает, что сходимость оценок решения постро-
енного метода (как и в методе DIRECT) достигается за счет всюду плотного
в пределе размещения точек испытаний, но выполненная численная апроба-
ция демонстрирует существенную неравномерность их размещения с преиму-
щественной концентрацией в окрестностях решений, что определяет эффек-
тивность метода. Метод рассчитан на использование в прикладных задачах,
где значения функций определяются в результате затратных по времени вы-
числений, а сами функции могут иметь разрывы. Функции качества такого
вида могут возникать, например, в нелинейных задачах управления при оп-
тимальной настройке свободных параметров по численно рассчитываемым
для замкнутой системы дополнительным нелинейным критериям.
102
Построенная реализация метода является последовательной, но вычисле-
ния функций на наборе гиперинтервалов, выделенных для деления на оче-
редной итерации, можно выполнять параллельно.
ПРИЛОЖЕНИЕ
Доказательство утверждения 1. Если условия (24) выполнены
при некотором ΔL из указанного промежутка, то (21)-(22), очевидно, будут
справедливы при том же ΔL и при ΔLg = α ΔL. Пусть теперь выполнены
(21)-(22) и для Dt нашлась соответствующая параΔL,ΔLg. Но поскольку
g-(ΔLg,Di) монотонно убывает с возрастанием ΔLg, то (21)-(22) тем бо-
лее будут выполнены при значенияхΔL, ΔLg = αΔL, что и требовалось.
Утверждение доказано.
Доказательство леммы 1. На первом этапе обработки поисковой ин-
формации на итерации k согласно описанию в разделе 3 в каждом d-слое
выделяется хотя бы один модифицированно недоминируемый гиперинтер-
Dd
вал
этого слоя. Последний из выделенных имеет связанный диапазон
s
[ΔLds, ΔLds+1) с наибольшим номером s = Sk(d), где ΔLdS
= +∞. Это вер-
k(d)+1
но, в частности, и для d-слоя гиперинтервалов, имеющих на текущей k-й ите-
рации наибольший диаметр d = dmaxk.
Далее, при построении разбиения (25) оси приращений ΔL в последнем
промежутке [ΔLj, ΔLj+1) с номером j = mk значение ΔLmk +1 = +∞. Это-
му промежутку соответствует множество гиперинтерваловOmkk,котороепо
Dd
построению обязательно включает в себя хотя бы один гиперинтервал
s
d-слоя с d = dmaxk (т.е. максимального диаметра), соответствующий диапазо-
ну [ΔLds, ΔLds+1) значений ΔL с номером s = Sk(dmaxk). На плоскости срав-
нения (d/2, F ) при сопоставлении гиперинтервалов изOmkkэтомугиперин-
тервалу будет соответствовать самая правая точка в полученном множестве
точек Pmkk.Посколькусравнениепроисходитдляпромежутка[ΔLmk,+∞),
точка с наибольшим d = dmaxk при достаточно большом ΔL обязательно будет
доминировать остальные и для нее также выполнится условие (17). Следова-
тельно, гиперинтервал наибольшего диаметра будет включен в множествоDk
гиперинтервалов, делимых на итерации k. Лемма доказана.
Доказательство теоремы 1. В силу предположения о глобальной
устойчивости множества решений X∗ (требование C), а также требований B
к структуре множества глобальных минимумов X∗ и функциям задачи, для
доказательства теоремы достаточно обосновать всюду плотное в пределе раз-
мещение точек испытаний. Действительно, множество поиска D компактно.
При выполнении требований A и B всюду плотное в пределе размещение
испытаний приведет к появлению подпоследовательностей точек измерений,
сходящихся к каждому из решений x∗. Каждое x∗ принадлежит замыканию
некоторого открытого подмножества χ из X, если X = ∅, или из D в про-
тивном случае. При всюду плотном в пределе размещении испытаний сколь
угодно близко от x∗ найдутся точки, являющиеся центрами открытых шаров,
включенных в χ. В каждом из таких шаров в какой-то момент метод разме-
стит точку испытания. Поэтому найдутся подпоследовательности допусти-
мых точек из подмножеств χ, сходящиеся к x∗ при неограниченном возраста-
103
нии числа итераций. Функции Q, g или (при X = ∅) функция g непрерывны
на замыканиях χ. Таким образом, последовательность рекордных измере-
ний x∗k будет минимизирующей и в силу требования C ее предельные точки
будут являться решениями задачи.
Остается обосновать всюду плотное в пределе размещение испытаний.
Приведем лишь схему рассуждения. Нужное поведение следует из леммы 1,
которая устанавливает, что в построенном методе на каждой итерации обяза-
тельно делится по крайней мере один из гиперинтервалов наибольшего диа-
метра. Поскольку деление гиперинтервалов происходит на три равные ча-
сти по наибольшему ребру, это обеспечивает строгое убывание диаметра с
некоторым коэффициентом, отделенным от единицы. Этих двух факторов
достаточно. Более подробное рассуждение можно построить аналогично до-
казательству теоремы 5.6 из [8] с учетом леммы 1. Теорема доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Городецкий С.Ю. Несколько подходов к обобщению метода DIRECT на задачи
с функциональными ограничениями // Математическое моделирование. Опти-
мальное управление. 2013. № 6 (1). С. 189-215. Нижний Новгород: Вестн. Ни-
жегород. ун-та им. Н.И. Лобачевского.
2.
Методы классической и современной теории автоматического управления: Учеб-
ник в 3-х т. Т. 2. Синтез регуляторов и теория оптимизации систем автоматиче-
ского управления / Под ред. Н.Е. Егупова. М.: Изд-во МГТУ им. Н.Э. Баумана,
2000.
3.
Баландин Д.В., Коган М.М. Синтез законов управления на основе линейных
матричных неравенств. М.: Физматлит, 2007.
4.
Александров А.Г. Методы построения систем автоматического управления. М.:
Физматкнига, 2008.
5.
Gershon E., Shaked U., Yaesh I. H∞ Control and Estimation of State-multiplicative
Linear Systems. London: Springer, 2005.
6.
Баландин Д.В., Коган М.М. Оптимальное по Парето обобщенное H2-оптималь-
ное управление и задачи виброзащиты // АиТ. 2017. № 8. С. 76-90.
Balandin D.V., Kogan M.M. Pareto Optimal Generalized H2-control and Vibropro-
tection Problems // Autom. Remote Control. 2017. V. 78. No. 8. P. 1417-1429.
7.
Городецкий С.Ю., Сорокин А.С. Построение оптимальных регуляторов по нели-
нейным критериям качества на примере одной динамической системы // Мате-
матическое моделирование. Оптимальное управление. 2012. № 2 (1). С. 165-176.
Нижний Новгород: Вестн. Нижегород. ун-та им. Н.И. Лобачевского.
8.
Сергеев Я.Д., Квасов Д.Е. Диагональные методы глобальной оптимизации. М.:
Физматлит, 2008.
9.
Strongin R.G., Sergeyev Ya.D. Global optimization with non-convex constraints:
Sequential and parallel algorithms. Dordrecht: Kluwer Acad. Publishers, 2000.
10.
Евтушенко Ю.Г., Малкова В.У., Станевичюс А.А. Параллельный поиск гло-
бального экстремума функций многих переменных // Журн. вычисл. матем. и
матем. физ. 2009. Т. 49. № 2. С. 255-269.
11.
Стронгин Р.Г., Гергель В.П., Гришагин В.А., Баркалов К.А. Параллельные вы-
числения в задачах глобальной оптимизации / Предисл.: В.А. Садовничий. М.:
Изд-во МГУ, 2013.
104
12.
Городецкий С.Ю. Триангуляционные методы параболоидов в задачах многоэкс-
тремальной оптимизации с ограничениями для класса функций с липшицевыми
производными по направлениям // Математическое моделирование. Оптималь-
ное управление. 2012. № 1 (1). С. 144-155. Нижний Новгород: Вестн. Нижегород.
ун-та им. Н.И. Лобачевского.
13.
Городецкий С.Ю. Исследование процедур глобальной оптимизации с адаптив-
ными стохастическими моделями. Дисс. на соискание уч. степ. канд. физ.-мат.
наук. Горький: ГГУ, 1984.
14.
Неймарк Ю.И. Динамические системы и управляемые процессы. М.: Наука,
1978.
15.
Городецкий С.Ю., Неймарк Ю.И. О поисковых характеристиках алгоритма гло-
бальной оптимизации с адаптивной стохастической моделью // Пробл. случай-
ного поиска. Рига: Зинатне, 1981. С. 83-105.
16.
Jones D.R., Perttunen C.D., Stuckman B.E. Lipschitzian Optimization without the
Lipschitz Constant // J. Optim. Theory Appl. 1993. V. 79. No 1. P. 157-181.
17.
Препарата Ф.Ф., Шеймос М.И. Вычислительная геометрия. Введение. М.: Мир,
1989.
18.
Jones D.R. The DIRECT global optimization algorithm / Encyclopedia of opti-
mization. 7 Vols. 2nd revised and expanded ed., ed. by C.A. Floudas, P.M. Pardalos.
Springer, 2009. P. 725-735.
19.
Евтушенко Ю.Г., Ратькин В.А. Метод половинных делений для глобальной
оптимизации функций многих переменных // Изв. АНСССР. Технич. киберне-
тика. 1987. № 1. С. 119-127.
20.
Gablonsky J.M., Kelley C.T. A Locally-Biased from of the DIRECT Algorithm //
J. Global Optim. 2001. V. 21. No. 1. P. 27-37.
21.
Sergeyev Ya.D., Kvasov D.E. Global Search Based on Efficient Diagonal Partitions
and a Set of Lipschitz Constants // SIAM J. Optim. 2006. V. 16. No. 3. P. 910-937.
22.
Sergeyev Ya.D. An Efficient Strategy for Adaptive Partition of N-dimensional In-
tervals in the Framework of Diagonal Algorithms // J. Optim. Theory Appl. 2000.
V. 107. No. 1. P. 145-168.
23.
Sergeyev Ya.D., Kvasov D.E. A Univariate Global Search Working with a Set of
Lipschitz Constants for the First Derivative// Optimization Lettes. 2009. No. 3.
P. 303-318.
24.
Kvasov D.E., Sergeyev Ya.D. Lipschitz Gradients for Global Optimization in a
One-Point-Based Partitioning Scheme // J. Comput. Appl. Math. 2012. V. 236.
P. 4042-4054.
25.
Sergeyev Ya.D., Mukhametzhanov M.S., Kvasov D.E. On the Efficiency of Nature-
Inspired Metaheuristics in Expensive Global Optimization with Limited Budget //
Sci. Reports. 8, 453 (2018).
26.
Городецкий С.Ю. О новой модели поведения целевой функции для диагональ-
ной реализации DIRECT-подобных методов // Научное периодическое издание
CETERIS PARIBUS. М.: РИЦ ЭФИР, 2016. № 1. С. 4-16.
27.
Карманов В.Г. Математическое программирование: Уч. пос. М.: Физматлит,
2008.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 06.10.2019
Принята к публикации 30.01.2020
105