Автоматика и телемеханика, № 8, 2020
© 2020 г. Н.В. ДЕРЕНДЯЕВ, д-р физ.-мат. наук (derendyaevnic@rambler.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского)
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ ВРАЩЕНИЯ
РОТОРНЫХ СИСТЕМ С ЖИДКОСТЬЮ1
Изложен новый метод исследования устойчивости, в котором, в отли-
чие от традиционного метода D-разбиения, знание характеристического
уравнения не требуется. Метод эффективен в широком классе задач ди-
намики тел с полостями, содержащими жидкость.
Ключевые слова: роторная система, полость, содержащая вязкую жид-
кость, режим стационарного вращения, устойчивость и автоколебания.
DOI: 10.31857/S0005231020080085
1. Введение
И.А. Вышнеградский (1871-1876) обратился к задаче об устойчивости ре-
жима работы паровой машины, снабженной регулятором Уатта. В знамени-
той работе 1876 г. И.А. Вышнеградский впервые установил условия устойчи-
вости движения паровой машины, а также получил необходимые и достаточ-
ные условия отрицательности действительных частей корней алгебраическо-
го уравнения (полинома) третьей степени и дал геометрическую интерпрета-
цию этих условий в виде диаграмм Вышнеградского. Д.К. Максвелл в задаче,
близкой к той, которой занимался И.А. Вышнеградский, пришел к тем же ма-
тематическим требованиям отрицательности действительных частей корней
характеристического полинома (1868), но не сделал отчетливых инженерных
выводов. Критерий отрицательности действительных частей всех корней по-
линома n-й степени получил Раус (1877). А.М. Ляпунов в своей диссертации
(1892) дал математическое обоснование исследованиям устойчивости при по-
мощи линеаризованных уравнений. А. Стодола (1893) распространил линеа-
ризованную теорию И.А. Вышнеградского на непрямое регулирование и, не
зная о работах Д.К. Максвелла и Рауса, предложил А. Гурвицу задачу о на-
хождении критерия отрицательности действительных частей всех корней по-
линома n-й степени с действительными коэффициентами. А. Гурвиц нашел
решение этой задачи в изящной форме детерминантных неравенств (1895).
Заметим, что из условий Рауса-Гурвица следует положительность всех ко-
эффициентов полинома, корни которого располагаются в левой полуплоско-
сти. Но тогда, как было показано Льенаром и Шипаром (1914), количество
детерминантных неравенств сокращается почти вдвое, т.е. необходимые и до-
статочные условия отрицательности действительных частей всех корней по-
линома степени n с положительными коэффициентами записываются в виде
1 Работа выполнена в порядке личной инициативы.
106
детерминантых неравенств
Δn-1 > 0, Δn-3 > 0,... ,
где Δk, k = 1, n определители из условий Гурвица [1].
В дальнейшем руководящим стимулом стало стремление дать в руки при-
кладников практически пригодные приемы исследования устойчивости. На
практике обычно речь идет не столько о том, что устойчива или неустойчива
данная система, сколько о таком подборе параметров системы, чтобы система
удовлетворяла ряду технических требований, оставаясь при этом устойчивой.
Фактически задача сводится к разбиению пространства параметров системы
на области устойчивости и неустойчивости. Существенным шагом в решении
этой задачи стало появление частотных критериев Найквиста (1932) и Ми-
хайлова (1938), новая трактовка критерия Найквиста и метод D-разбиения
Ю.И. Неймарка (1949) [2]. В методе D-разбиения рассматривается плоское
сечение пространства комплексных полиномов, точками которого являются
полиномы степени n, а их коэффициенты зависят либо от одного комплекс-
ного, либо от двух действительных параметров; значения параметров, таким
образом, принадлежат плоскости параметров. Поскольку корни полиномов
непрерывно зависят от их коэффициентов, то кривая на плоскости парамет-
ров (D-кривая), точкам которой соответствуют полиномы, имеющие хотя бы
один корень на мнимой оси, разбивает, в общем случае, плоскость параметров
на области с различной степенью неустойчивости, т.е. с различным числом
корней справа от мнимой оси. D-кривая, по сути, является отображением
мнимой оси плоскости корней полиномов на плоское сечение пространства
полиномов. Метод D-разбиения был обобщен на квазиполиномы и другие це-
лые функции, что позволило применять его к исследованию устойчивости
некоторых распределенных систем.
Идея построения отображения мнимой оси плоскости характеристических
чисел на плоское сечение пространства параметров оказалась очень плодо-
творной. Удалось построить области устойчивости в случае таких систем, для
которых само выписывание конечного уравнения для характеристических чи-
сел часто оказывается проблематичным. При этом оказалось, что рассмот-
рение всевозможных возмущенных движений излишне, а достаточно лишь
рассмотреть условия осуществимости возмущенных движений определенного
типа. Далее речь пойдет об устойчивости режимов стационарного вращения
роторных систем, содержащих жидкость. Именно для них при исследовании
устойчивости в линейном приближении удалось развить эффективный метод
[3, 4], в котором, в отличие от метода D-разбиения, знание характеристиче-
ского уравнения не требуется. В то же время исследование возмущенных
движений типа круговой прецессии позволяет с минимальными затратами
построить D-кривую и выделить области устойчивости.
Проиллюстрируем оригинальный метод исследования устойчивости на
примере задачи об устойчивости (в линейном приближении) стационарно-
го вращения цилиндра, частично заполненного вязкой несжимаемой жидко-
стью. Отличительная особенность рассматриваемой задачи состоит в том, что
скорость вращения тела, содержащего жидкость, поддерживается постоянной
за счет внешнего источника энергии, вследствие чего кинетическая энергия
107
содержащейся в полости жидкости может возрастать во времени благодаря
взаимодействию со стенками полости. Для таких задач представляет боль-
шую трудность использование методов, связанных с построением функции
Ляпунова.
2. Постановка задачи
Пусть круговой цилиндр радиуса a совершает стационарное вращение во-
круг своей оси (совпадающей с осью Oz неподвижной прямоугольной си-
стемы координат Oxyz), которая находится в вязкоупругом осесимметрич-
ном закреплении. Вязкая несжимаемая жидкость, частично заполняющая
цилиндр, при стационарном вращении расположена в слое постоянной тол-
щины h на боковой поверхности цилиндра и вращается вместе с ним как
твердое тело. Ограничимся рассмотрением задачи об устойчивости в линей-
ном приближении и в рамках плоской модели, т.е. в предположении, что точ-
ки цилиндра могут перемещаться лишь параллельно плоскости Oxy, а поле
скоростей жидкости имеет лишь x- и y-компоненты, которые, как и давление
жидкости, не зависят от z. Плоская модель применима, если осевые пере-
мещения цилиндра и угловое перемещение его оси пренебрежимо малы (на-
пример, ось цилиндра в подшипниках), а сам цилиндр достаточно длинный
(концевые эффекты несущественны). Система линеаризованных уравнений
плоской модели и граничных условий к ним, используемая в данной работе,
содержит:
1. Уравнения поступательного движения цилиндра параллельно плоскости
Oxy, линеаризованные вблизи состояния цилиндра при стационарном враще-
нии
Mx¨0 +Hx˙0 +Kx0 =Fx,
(1)
y0 + Hy˙0 + Ky0 = Fy,
где x0, y0 координаты точки пересечения оси цилиндра с плоскостью Oxy;
Fx, Fy компоненты силы, с которой жидкость действует на единицу дли-
ны цилиндра; M масса единицы длины цилиндра; H, K соответственно
коэффициенты демпфирования и жесткости закрепления оси цилиндра, де-
ленные на его длину;
2. Условие постоянства абсолютной угловой скорости вращения цилиндра
вокруг оси Oz: Ω = const;
3. Уравнения движения вязкой несжимаемой жидкости в плоскости Oxy,
линеаризованные вблизи стационарного квазитвердого вращения жидкости
вокруг оси Oz:
∂υj
∂
∂
1 ∂p′
+υ0
vj + υγ
υ0j = -
+ νΔυj,
∂t
k∂xk
∂xγ
ρ ∂xj
(2)
∂υj
= 0; υ01 = -Ωx2; υ02 = Ωx1;
∂xj
4. Условие прилипания жидкости к поверхности цилиндра, условие непре-
рывности напряжений и кинематическое условие на свободной поверхности,
перенесенные в линейном приближении по отклонениям от состояния стацио-
108
нарного вращения на поверхности x2 + y2 = a2 и x2 + y2 = (a - h)2 соответ-
ственно:
υ1 = x01 + Ω x02; υ2 = x02 - Ω x01,
x21 + x22 = a2,
σ′ikn0k = -ρΩ2bSn0i,
)
(∂υi
∂υk
σ′ik = -p′δik + µ
+
,
∂xk
∂xi
(
)
∂S
∂
∂
(3)
+ Ω -x2
+x1
S=υjn0j; x21 +x22 =b2,
∂t
∂x1
∂x2
здесь n0j внешняя нормаль к поверхности жидкости, S отклонение сво-
бодной поверхности жидкости от невозмущенной поверхности x2 + y2 = b2 в
направлении нормали к ней;
5. Формулы, определяющие Fx, Fy через отклонения давления и компонент
поля скоростей жидкости от соответствующих величин при стационарном
квазитвердом вращении:
∫
Ω2a2
(4)
Fj = - σiknkdl + ρ
x0j,
2
x21 + x22 = a2.
Интеграл вычисляется по окружности x2 + y2 = a2, dl элемент длины
дуги.
3. Свойства симметрии и круговая прецессия
Перечисленные уравнения и граничные условия линейны и однородны от-
носительно отклонений от состояния стационарного вращения цилиндра и
частично заполняющей его жидкости и обладают двумя очевидными свой-
ствами симметрии: а) инвариантны относительно сдвига начала отсчета вре-
мени, т.е. преобразования t′ = t - t0; б) инвариантны относительно поворота
системы координат вокруг Oz на уголπ2 , т.е. преобразования x′ = y, y′ = -x,
z′ = z. В силу свойства симметрии а) система уравнений (1)-(4) допускает
частные решения, пропорциональные eλt, где λ характеристическое число.
Будем считать стационарное вращение цилиндра с жидкостью устойчивым в
малом, если все λ имеют отрицательные действительные части, и неустойчи-
вым, если хотя бы одно λ имеет положительную действительную часть. Если
характеристические числа λ непрерывно зависят от параметров задачи, то
изменение степени неустойчивости в системе происходит при появлении мни-
мого λ = iω. При этом наряду с решением уравнений (1)-(4)
(
)
x∗ex + y∗ey,v∗x(x,y)ex + v∗y(x,y)ey,p∗(x,y) eiωt.
В силу свойства симметрии б) существует также решение
(
)
- y∗ex + x∗ey,-v∗y(y,-x)ex + v∗x(y,-x)ey,p∗(y,-x) eiωt,
109
где x∗, y∗
комплексные амплитуды компонент радиуса-вектора точки пе-
ресечения оси цилиндра с плоскостью Oxy; v∗x, v∗y, p∗ комплексные ампли-
туды отклонений компонент поля скоростей и давления жидкости от соот-
ветствующих величин при стационарном квазитвердом вращении; ex, ey
орты координатных осей. Умножая первое из этих решений на i и склады-
вая со вторым, получим в силу линейности уравнений (1)-(4) частное ре-
шение, описывающее так называемую круговую прецессию цилиндра с жид-
костью, т.е. такое движение, в котором точка пересечения оси цилиндра с
плоскостью Oxy описывает окружность, а отклонения гидродинамических
элементов от стационарных значений изменяются во времени ∼ eiωt. Обрат-
но: если при некоторых значениях параметров уравнения (1)-(4) допускают
решение типа круговой прецессии, то существует мнимое характеристическое
число λ. Таким образом, значения параметров, при которых происходит из-
менение степени неустойчивости в системе (существует хотя бы одно мнимое
характеристическое число), могут быть найдены из условия существования
круговой прецессии цилиндра с жидкостью. Приведенное соображение опре-
деляет ход решения задачи в данной статье. Именно сначала рассматрива-
ется гидродинамическая задача о движении вязкой несжимаемой жидкости,
частично заполняющей вращающийся цилиндр, совершающий круговую пре-
цессию. Затем вычисляется сила, с которой жидкость действует на вращаю-
щийся цилиндр в случае круговой прецессии. Далее, на основании получен-
ных выражений для гидродинамической силы из уравнений поступательного
движения цилиндра (1) находятся условия, при которых возможна круго-
вая прецессия. Эти условия в соответствии со сказанным выше определяют
границы областей с различной степенью неустойчивости в пространстве па-
раметров задачи.
4. Гидродинамическая задача
Пусть бесконечно длинный круговой цилиндр с внутренним радиусом а
вращается вокруг своей оси с угловой скоростью ω0 и прецессирует с часто-
той ω таким образом, что его ось описывает цилиндрическую поверхность
радиуса ε (рис. 1). Абсолютная угловая скорость цилиндра Ω складывается
из угловой скорости собственного вращения цилиндра ω0 и скорости прецес-
сии ω (Ω = ω0 + ω).
Выберем неинерциальную систему отсчета Oξη (см. рис. 1), жестко свя-
занную с так называемой линией центров, проходящей через центр прецес-
сии O1 и центр сечения цилиндра O. Эта система поступательно двигается по
окружности радиуса ε со скоростью ωε и вращается вокруг оси цилиндра с
угловой скоростью ω. В пространстве отсчета Oξη введем полярную систему
координат r, ϕ с центром в точке O. В этой системе компоненты поля сил
инерции, действующих в пространстве отсчета Oξη на частицу единичной
массы, имеют вид:
fr = ω2r + 2ωυ + ω2εcos φ,
(5)
fφ = -2ωu - ω2
εsin φ.
Рассмотрим задачу о плоском движении вязкой несжимаемой жидкости,
частично заполняющей вращающийся цилиндр, в случае круговой прецес-
110
y
x
h
r
j
a
O
wt
O
1
x
e
Рис. 1. Неинерциальная система отсчета Oξη.
сии с малым радиусом ε, при которой отклонения гидродинамических эле-
ментов от стационарных значений малы и в неподвижной системе отсчета
изменяются во времени ∼ eiωt. Используя закон изменения энергии вязкой
жидкости, можно показать, что в случае круговой прецессии с малым радиу-
сом движение жидкости относительно системы отсчета Oξη установившееся,
т.е. не зависит от времени. Уравнения установившегося движения жидкости
относительно системы Oξη и граничные условия, линеаризованные вблизи
стационарного квазитвердого вращения жидкости вокруг оси цилиндра
(6)
u = 0, υ = ω0r
записываются в виде:
(
)
∂u′
1 ∂p
u′
2 ∂υ′
+ ν Δu′ -
-
,
ω0 ∂ϕ=Ω2r+ω2εcosϕ+2Ωυ′ -
ρ ∂ρ
r2
r2 ∂ϕ
(
)
∂υ′
1 ∂p
υ′
2 ∂u′
(7)
+ ν Δυ′ -
+
,
ω0 ∂ϕ=-ω2εsinϕ-2Ωu′ -
rρ ∂ϕ
r2
r2 ∂ϕ
∂u′
u′
1 ∂υ′
+
+
= 0,
∂r
r
r ∂ϕ
(8)
u′ = 0, υ′
= 0, r = a,
′
∂u
-p - ρΩ2rη + 2µ
= -p0,
∂r
′
∂υ
1 ∂u′
υ′
(9)
i
+
-
= 0,
∂r
r ∂ϕ
r
∂η
ω0 ∂ϕ=u′;r=a-h.
111
Здесь u′, υ′
малые отклонения компонент поля скоростей от (6), p
давление, ρ плотность, ν, µ кинематическая и динамическая вязкость
жидкости, r = a - h + η(ϕ) уравнение свободной поверхности жидкости,
p0
давление на свободной поверхности. Введем потенциалы Ламба θ, ψ и
функцию χ
∂θ
1 ∂ψ
u′ =
+
,
∂r
r ∂ϕ
1 ∂θ
∂ψ
υ′ =
-
,
r ∂ϕ
∂r
1
χ=
Ω2r2 + ω2εr cos ϕ - 2Ωψ + const
2
и запишем систему (7) в виде:
∂
1 ∂
1 ∂
∂
F +
G = 0,
F -
G = 0, Δθ = 0,
∂r
r ∂ϕ
r ∂ϕ
∂r
p
∂θ
∂ψ
(10)
F =χ-
-ω0
,
G = νΔψ + 2Ωθ - ω0
ρ
∂ϕ
∂φ
Неоднозначностью в выборе потенциалов Ламба (калибровкой потенциа-
лов) можно распорядиться так, что (10) сведется к системе:
(11)
F = 0, G = 0, Δθ = 0.
Граничные условия (8) и (9) после введения потенциалов Ламба принима-
ют вид:
∂θ
1 ∂ψ
1 ∂θ
∂ψ
(12)
+
= 0,
-
= 0, r = a,
∂r
r ∂φ
r ∂φ
∂r
)
(∂2θ
1 ∂ψ
1 ∂2ψ
p
p0
2ν
-
+
-
-Ω2rη = -
,
∂r2
r2 ∂φ
r ∂r∂φ
ρ
ρ
∂2ψ
∂2ψ
∂2ψ
∂θ
∂ψ
(13)
r2
- 2r
-
+2
-r
= 0,
∂r2
∂r∂φ
∂φ2
∂φ
∂r
∂θ
∂θ
1 ∂ψ
+
,
r = a - h.
ω0 ∂φ=
∂r
r ∂φ
Уравнения (11) с граничными условиями (12), (13) содержат лишь следую-
щие размерные параметры: ω0, Ω, ν, a, a - h, ε (параметр p0 несуществен, так
как жидкость несжимаема). В силу линейности сформулированной краевой
задачи параметр ε войдет в решение в первой степени. Этим параметром
определяется лишь масштаб скорости движения жидкости, вызванного пре-
цессией цилиндра. Оставшиеся пять параметров образуют всего три незави-
112
симые безразмерные комбинации:
ω
a-h
ν
(14)
,
,
,
Ω
a
Ωa2
которые и будут критериями подобия в рассматриваемой задаче.
5. Вычисление гидродинамической силы
Перейдем к решению краевой задачи (11)-(13). Будем искать решение си-
стемы (11) в виде:
[
]
[
]
θ = 2Re Θ(r)eiφ ,
ψ = 2Re Ψ(r)eiφ ,
i2 = -1.
Из третьего уравнения системы (11) найдем
[(
]
c2 )
(15)
θ = 2Re c1r +
eiφ ,
r
после чего второе уравнение сведется к виду
)
d2Ψ
1 dΨ
( iω0
1
2Ω(
c2 )
(16)
+
-
+
Ψ=-
c1r +
dr2
r dr
ν
r2
ν
r
Интегрируя (16), получим
([
]
)
(
2Ω
c2 )
ψ = 2Re
-
i c1r +
+ c3L1(kr) + c4M1(kr) eiφ
,
ω0
r
(17)
L1 = e-κaH(2)1(kr), M1 = eκbH(1)1
(kr),
√
(
)
ω0
|ω0|
k=κ
-
+i
,
κ=
,
b = a - h.
|ω0|
2ν
где Hn1,2)(kr) функции Ганкеля.
Выражение для давления найдем из первого уравнения (11):
([
]
)
(
)
p
c
2
ω2εr
Ω2r2
(18)
= 2Re
-iω0
c1r +
+
eiφ
- 2Ωψ +
+ C.
ρ
r
2
2
Радиальное отклонение свободной поверхности жидкости η(φ) ищем в виде
(19)
η(φ) = 2Re (η∗eiφ
).
Подставляя (15), (17)-(19) в граничные условия (12), (13), получим
систему линейных алгебраических уравнений относительно постоянных
113
c1,c2,c3,c4, выражения для η∗ и аддитивной постоянной в (18):
3-τ
1+τ c2
i
c1 +
+
Z1(ka) = 0,
1-τ
1-τa2
a
3-τ
1 + τ ic2
1
ic1 -
- kZ0(ka) +
Z1(ka) = 0,
1-τ
1-τ a2
a
(
)
1 + τ 4i
2k
4
(20)
c2 +
Z0(kb) + k2 -
Z1
(kb) = 0,
1-τb3
b
b2
]
2
τ2(3 - τ)
i
[2 - 4τ + τ
4
-
ibc1 +
(1 + τ)
-
c2 -
(1 - τ)2
b
(1 - τ)2
k2b2
)
1-τ
( 2τ - 1
1-τ
1
-2
Z0(kb) +
+4
Z1(kb) = -
τ2Ωεb,
kb
1-τ
k2b2
2
2
3-τ
1+τc2
i
p0
Ω2b
iω0η∗ =
c1 +
+
Z1(kb), C =
-
,
1-τ
1-τb2
b
ρ
2
где
ω
(21)
τ =
,
Zn(kr) = c3Ln(kr) + c4Mn
(kr),
Ω
Ln(kr) = e-κaH(2)n(kr), Mn(kr) = eκbH(1)n(kr).
При выводе (20) были использованы известные формулы для производ-
ных от цилиндрических функций [5]. В ряде интересных случаев значение kr
(b ≤ r ≤ a) очень велико, что позволяет также использовать в (20) асимп-
тотические разложения для этих функций. Применение перенормированных
функций Ганкеля Ln(kr) и Mn(kr) оказывается при этом очень удобным.
После того как найдены постоянные c1, c2, c3, c4, краевая задача (11)-(13), в
принципе, решена. Обратимся к вычислению силы, с которой жидкость дей-
ствует на цилиндр. Интегрируя напряжения, приложенные к внутренней по-
верхности цилиндра, получим для компонент силы, действующей на единицу
его длины:
]
[1
c2
Fξ = 2πaρRe
ω2εa + 2i(Ω + ω)
,
(22)
2
a
Fη = -4πρ(Ω + ω)Re c2.
В случае когда частота прецесси ω → Ω, можно сравнительно просто вы-
разить c2 из (20), воспользовавшись асимптотическими разложениями для
цилиндрических функций при малых значениях аргумента [5], и записать
(22) в виде:
Fξ = πρΩ2a2ε + O(ω0),
(
)
(23)
8πεµω0(δ4
+ 1)
b
Fη =
+ O ω20ln|ka| , δ =
δ4 - 1 - 2(δ4 + 1)lnδ
a
114
Fx*, Fh*
150
w/W
0
0,621
1
2,578
0,61
2,56
2,57
2,59
-150
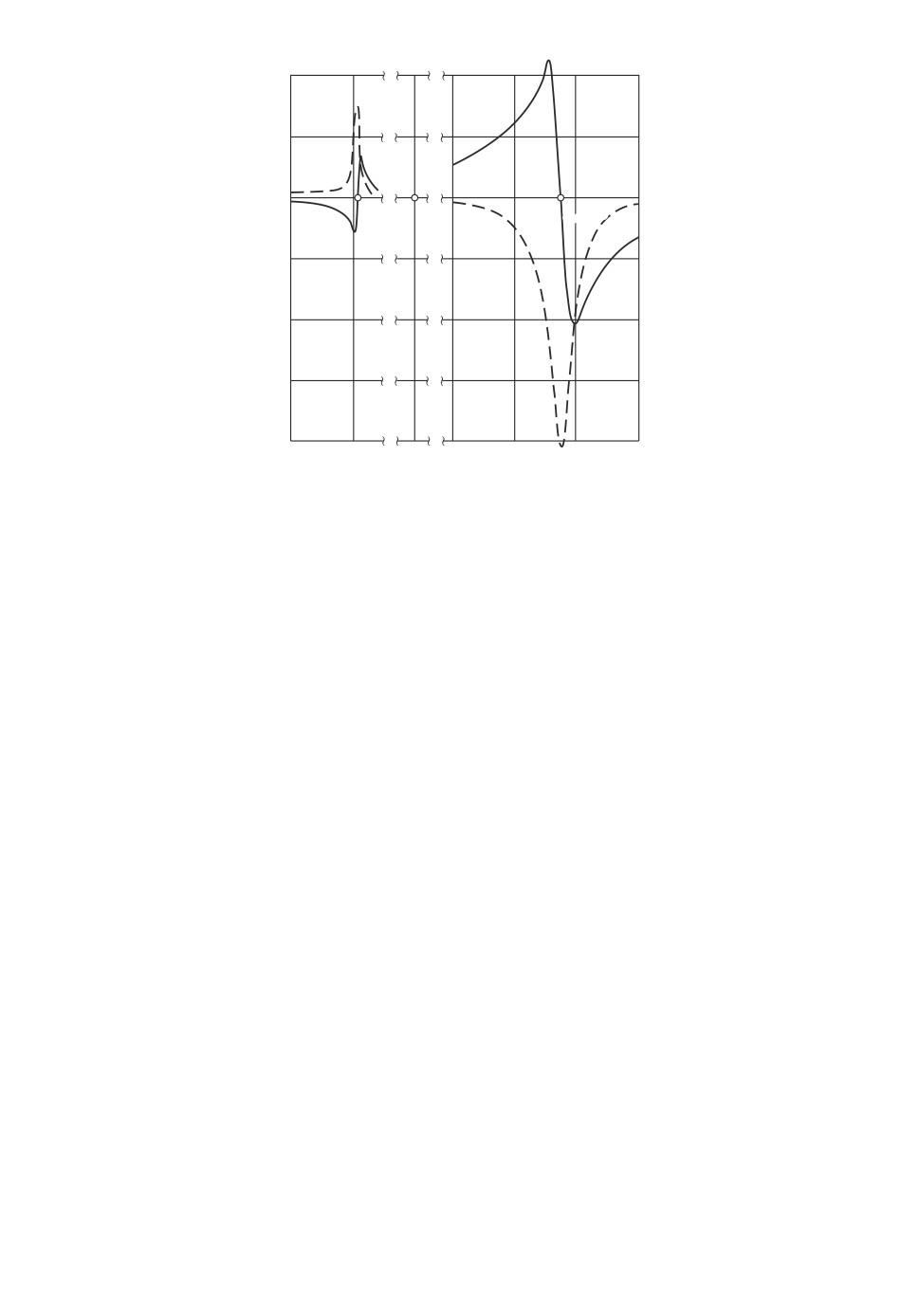
Рис. 2. Зависимости безразмерных компонент гидродинамической силы от па-
раметра τ.
Из выражений (23) видно, что в окрестности резонанса ω = Ω проекция
силы на линию центров Fξ > 0, т.е. гидродинамическая сила стремится уве-
сти ось цилиндра от оси прецессии (на рис. 1 точка пересечения оси прецес-
сии плоскостью рисунка центр прецессии O1). Далее, компонента силы Fη
может быть отлична от нуля только в случае вязкой жидкости. Знамена-
тель в выражении для Fη при 0 < δ < 1 положителен, следовательно, при
ω < Ω имеем Fη > 0, т.е. гидродинамическая сила стремится увеличить уг-
ловую скорость прецессии цилиндра, а при ω > Ω получаем, что Fη < 0 и
эффект действия силы обратный. Эти выводы согласуются с так называемой
концепцией вращающегося трения [6], распространенной в прикладных иссле-
дованиях. Отметим также, что момент гидродинамической силы (23) относи-
тельно оси цилиндра равен нулю. На рис. 2 изображены в качестве примера
зависимости безразмерных компонент гидродинамической силы Fξ∗ = Fξ /F0
(сплошные линии) и Fη∗ = Fη/F0 (штриховые линии) от ω/Ω, полученные
в соответствии с (20), (22) в случае δ = 0,5; ν/(Ωa2) = 10-5. Масштаб силы
F0 = mω2ε, где m = πρ(a2 - b2) масса жидкости, приходящаяся на еди-
ницу длины цилиндра. Зависимость силы от отношения частот имеет четко
выраженный резонансный характер, что обусловлено резонансным возбуж-
дением волн, распространяющихся по свободной поверхности вращающейся
жидкости, заполняющей цилиндр.
Сравнение результатов вычисления гидродинамической силы с силой, по-
лученной в рамках консервативной модели (µ = 0), показывает хорошее ко-
личественное совпадение ξ-компонент вне окрестностей резонансных значе-
ний ω/Ω. Вместе с этим в окрестностях резонансов, в отличие от того, что да-
ет консервативная модель, ξ-компонента гидродинамической силы конечна и
сравнима по величине с η-компонентой. Важно также отметить, что в окрест-
ностях резонансов, даже при весьма малых значениях параметра ν/(Ωa2) вол-
115
новое движение, вызванное прецессией цилиндра, всюду в жидкости сильно
отличается от того движения, которое дает консервативная модель.
6. Построение области устойчивости стационарного вращения
в плоскости параметров закрепления оси цилиндра
Подставим вычисленную гидродинамическую силу, действующую на еди-
ницу длины цилиндра, в уравнения движения цилиндра, положив в правых
частях (1):
Fx = Fξ cos(ωt) - Fη sin(ωt),
Fy = Fξ sin(ωt) + Fη cos(ωt).
Положив затем в (1) x0 = ε cos ωt; y0 = ε sin ωt , что соответствует круговой
прецессии с частотой ω и радиусом ε, получим соотношения, связывающие ω
и параметры задачи в случае круговой прецессии:
M
K
H
(24)
K∗ -
τ2 = F∗ξτ2, H∗τ = F∗ητ2, K∗ =
,
H∗ =
,
m
mΩ2
mΩ
где K∗,H∗
соответственно, безразмерные коэффициенты жесткости и
демпфирования закрепления оси цилиндра. Безразмерные компоненты си-
лы F∗ξ, F∗η зависят только от параметров (14). При фиксированных значе-
ниях этих параметров соотношения (24) задают в плоскости H∗, K∗ кри-
вую, точкам которой соответствуют такие значения параметров, при кото-
рых возможна круговая прецессия цилиндра. Эта кривая в соответствии со
сделанными выше замечаниями разбивает плоскость параметров закрепле-
ния оси цилиндра H∗, K∗ на области с различной степенью неустойчивости.
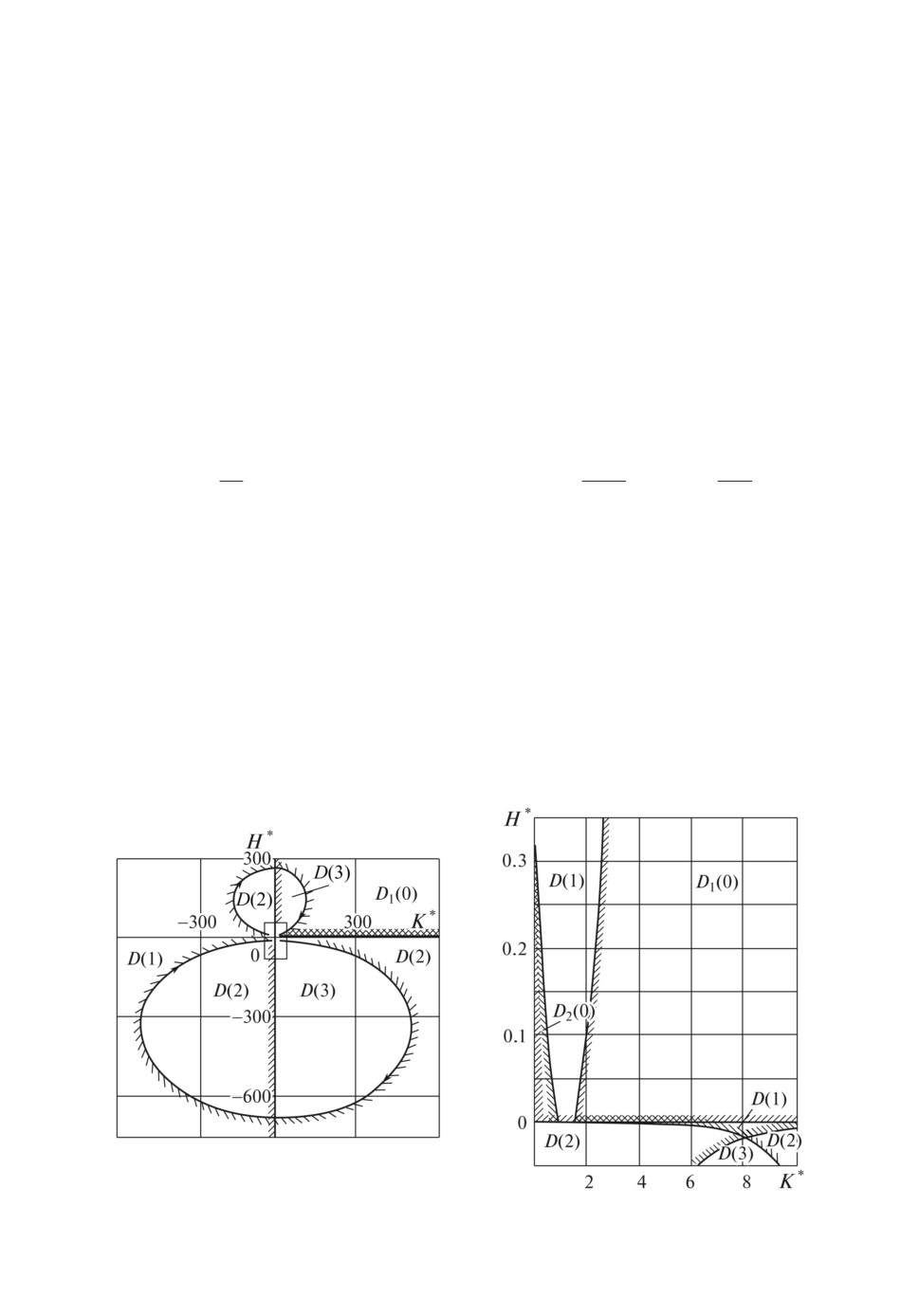
Следуя [2], будем называть ее D-кривой. На рис. 3 приведено разбиение плос-
кости H∗, K∗, осуществляемое D-кривой, в случае δ = 0,9, ν/(Ωa2) = 10-6,
Рис. 3. D-кривая.
116
M/m = 1,68. Стрелкой вдоль D-кривой указано направление возрастания па-
раметра τ. D-кривая на рис. 3 образована регулярной ветвью, вдоль которой
параметр τ изменяется в интервале (-∞, +∞), и каждому значению парамет-
ра τ соответствует одна точка кривой и особой прямой K∗ = 0, соответствую-
щей τ = 0. Наличие особой прямой вызвано тем, что при τ = 0 компоненты
гидродинамической силы обращаются в нуль.
D-кривую принято штриховать так, что переход в плоскости параметров
со штрихованной стороны кривой на нештрихованную соответствует увеличе-
нию степени неустойчивости. Штриховка может переходить с одной стороны
D-кривой на другую в тех точках, где нарушается однозначность отображе-
ния мнимой оси плоскости λ в точки D-кривой [2]. В рассматриваемой здесь
задаче штриховка D-кривой меняется в точке регулярной ветви, соответст-
вующей значению τ = 0, поскольку при этом значении τ нарушается одно-
значность вышеназванного отображения (точке τ = 0 на мнимой оси плоско-
сти λ соответствует особая прямая в плоскости параметров закрепления оси
цилиндра).
Область устойчивости всегда должна содержать точку, соответствующую
достаточно большим положительным значениям коэффициента демпфиро-
вания H∗. Исходя из этого, на рис. 3 указана область с нулевой степенью
неустойчивости D1(0). Указаны также области D(n) со степенью неустойчи-
вости n. Интересно отметить, что наряду с D1(0) существует еще одна область
устойчивости D2(0) в окрестности нулевых значений H∗, K∗ (разбиение
этой окрестности приведено в правой части рис. 3). Отметим также, что при
H∗ = 0 точке на границе области устойчивости соответствует τ = 1, что со-
гласуется с известным результатом, установленным в [6] путем феноменоло-
гического введения сил внутреннего трения во вращающемся роторе.
7. Заключение
Предложенный метод исследования устойчивости был успешно применен
при решении ряда задач об устойчивости вращения роторных систем, содер-
жащих жидкость [7-12]. При этом одни задачи ставились впервые, а решение
других было, по сути дела, получено заново. Исследование поведения режи-
ма стационарного вращения цилиндра, частично заполненного вязкой несжи-
маемой жидкостью, вблизи границы области устойчивости в пространстве
параметров проведено в [13] впервые. Показано, что при переходе через эту
границу происходит бифуркация Андронова-Хопфа от режима стационар-
ного вращения рождается периодическое движение типа круговой прецессии.
В предложенном методе, в отличие от традиционного метода D-разбиения,
знание характеристического уравнения вообще не требуется. Более того, при
исследовании устойчивости достаточно ограничиться рассмотрением лишь
возмущений специального вида типа круговой прецессии. Последнее свя-
зано с учетом свойств симметрии уравнений движения рассматриваемой си-
стемы.
Выражаю благодарность Д.Н. Дерендяеву за помощь в оформлении ста-
тьи.
117
СПИСОК ЛИТЕРАТУРЫ
1.
Гантмахер Ф.Р. Теория матриц. М.: Наука, 1967.
2.
Неймарк Ю.И. Устойчивость линеаризованных систем. Л.: ЛКВВИА, 1949.
3.
Дерендяев Н.В., Сандалов В.М. Об устойчивости стационарного вращения ци-
линдра, частично заполненного вязкой несжимаемой жидкостью // ПММ. 1982.
Т. 46. Вып. 4. С. 578-586.
4.
Дерендяев Н.В., Сеняткин В.А. Условия устойчивости стационарного враще-
ния цилиндра, заполненного слоисто-неоднородной вязкой несжимаемой жид-
костью // ПМТФ. 1984. № 1. C. 34-44.
5.
Ватсон Г.Н. Теория бесселевых функций. Ч. 1. М.: Изд-во иностр. лит., 1949.
6.
Болотин В.В. Неконсервативные задачи теории упругой устойчивости. М.: Физ-
матгиз, 1961.
7.
Дерендяев Н.В., Сандалов В.М. Устойчивость стационарного вращения ротора,
заполненного стратифицированной вязкой несжимаемой жидкостью // Маши-
новедение. 1986. № 1. С. 19-26.
8.
Сандалов В.М. Динамическая неустойчивость турбомашин, обусловленная ра-
диальными зазорами в подшипниках скольжения и жидкостным наполнением
полостей роторов // Дисс. канд. физ.-мат. наук. Горький, 1983.
9.
Сеняткин В.А. Неустойчивость роторных систем, обусловленная содержащейся
в них вязкой жидкостью // Дисс. канд. физ.-мат. наук. Горький, 1985.
10.
Солдатов И.Н. Устойчивость и автоколебания роторных систем, содержащих
проводящую вязкую жидкость в магнитном поле // Дисс. канд. физ.-мат. наук.
Нижний Новгород, 1994.
11.
Derendyaev N.V., Vostrukhov A.V., Soldatov I.N. Stability and Andronov-Hopf Bi-
furcation of Steady-State Motion of Rotor System Partly Filled with Liquid: Contin-
uous and Discrete Models // ASME. J. Appl. Mech. 2006. V. 73. No. 4. P. 580-589.
12.
Дерендяев Н.В. Устойчивость вращения роторных систем, содержащих жид-
кость. Нижний Новгород.: Изд-во Нижегород. гос ун-та, 2014.
13.
Дерендяев Н.В., Сандалов В.М., Солдатов И.Н. О рождении периодическо-
го движения в задаче об устойчивости стационарного вращения вертикально-
го ротора на гидродинамических подшипниках // Машиноведение. 1988. № 4.
C. 98-103.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 16.10.2019
Принята к публикации 30.01.2020
118