Автоматика и телемеханика, № 8, 2020
© 2020 г. Д.С. ХОРЬКИН (dmitryhorkin@gmail.com),
М.И. БОЛОТОВ (maksim.bolotov@itmm.unn.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского),
Л.А. СМИРНОВ, канд. физ.-мат. наук (smirnov_lev@appl.sci-nnov.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского;
Институт прикладной физики РАН, Нижний Новгород),
Г.В. ОСИПОВ, д-р физ.-мат. наук (osipov@vmk.unn.ru)
(Нижегородский государственный университет им. Н.И. Лобачевского)
ФАЗОВОЕ УПРАВЛЕНИЕ ДИНАМИКОЙ СВЯЗАННЫХ РОТАТОРОВ1
Исследована динамика вращательных движений в системе двух несим-
метрично связанных систем маятникового типа. Изучены механизмы по-
тери устойчивости синфазного вращательного движения. Проанализиро-
ван сценарий возникновения хаотической динамики в зависимости от зна-
чений управляющих параметров.
Ключевые слова: ротатор, фазовое управление, синхронизация, враща-
тельный режим, хаос.
DOI: 10.31857/S0005231020080127
1. Введение
Исследование коллективного поведения в сетях связанных элементов яв-
ляется одной из привлекательных и важных областей нелинейной динамики,
актуальных с точки зрения теории и приложений [1-4]. Известно, что даже
при слабой связи элементы ансамблей могут стремиться к достижению об-
щего ритма функционирования, т.е. к синхронизации [1]. Достаточно широ-
кий класс объектов, рассматриваемых в физике, радиотехнике, электронике
и других областях естествознания, могут быть описаны с помощью моделей
систем связанных маятников [5]. Несмотря на простоту этих моделей, они
используются не только для описания механических объектов [6], но и для
разнообразных процессов в молекулярной биологии [7-9], полупроводнико-
вых структурах [10] и т.д. Данная модель также может рассматриваться как
базовая при теоретических исследованиях связанных джозефсоновских кон-
тактов [11-13], а также систем фазовой синхронизации [3, 4, 14, 15].
2. Описание модели
В данной работе рассмотрено поведение ансамбля двух парциальных си-
стем фазовой синхронизации, соединенных параллельно через сигналы фа-
зовых рассогласований [3, 4]. Структурная схема ансамбля представлена на
рис. 1. Математическую модель системы двух таких объектов можно пред-
ставить в виде системы уравнений маятникового типа:
ϕ1 + λϕ˙1 + sin ϕ1 = γ + κ1 sin (ϕ2 - ϕ1),
(1)
ϕ2 + λϕ˙2 + sin ϕ2 = γ + κ2 sin (ϕ1 - ϕ2).
1 Работа выполнена при финансовой поддержке Российского научного фонда, проект
№ 19-12-00367.
165
Рис. 1. Структурная схема пары систем фазовой синхронизации (СФС1
и СФС2), связанных параллельно через сигналы фазовых рассогласований
(ФД фазовый детектор).
Здесь λ коэффициент затухания сигнала, γ отношение начальной к мак-
симальной расстройке частот, κ1, κ2 параметры усиления сигнала, харак-
теризующие силу связи между системами.
Ансамбль двух симметрично связанных идентичных маятников был рас-
смотрен в [16]. Динамика неидентичных маятников (с различными величи-
нами γ) исследована в [17] . Заметим, что с помощью системы (1) возможно
описание поведения ансамбля глобально связанных ротаторов, в котором об-
разуются два кластера с различным числом взаимно синхронных элементов
(N1 и N2) [18]. В силу различных N1 и N2 связь между кластерами естествен-
ным образом является асимметричной.
Исследуем зависимость поведения системы (1) от степени асимметрично-
сти связи. Для этого представим систему (1) в виде
ϕ1 + λϕ˙1 + sin ϕ1 = γ + K sin (ϕ2 - ϕ1),
(2)
ϕ2 + λϕ˙2 + sin ϕ2 = γ + βK sin (ϕ1 - ϕ2),
где теперь K параметр связи, β параметр, характеризующий степень
асимметричности связи. Такой вид связи является дополнительным сред-
ством управления динамическими режимами, в том числе синхронными ре-
жимами в различного рода технических устройствах, например в системах
фазовой синхронизации [3, 4]. Как будет показано ниже, при определенном
выборе управляющих параметров в такой системе могут устанавливаться как
синфазные, так и несинфазные вращательные режимы.
3. Синфазный режим и его устойчивость
В системе (2) существует синфазное периодическое движение: координаты
совпадают друг с другом, т.е. ϕ1(t) = ϕ2(t) = φs(t). При этом φs(t) удовлетво-
ряет уравнению
φs +
φs + sinφs = γ.
Определим, при каких значениях управляющих параметров синфазный вра-
щательный режим системы (2) теряет устойчивость. Для этого линеаризуем
систему (2) относительно синфазного вращательного движения φs. Предста-
вим фазы ротаторов в виде
ϕ1 = φs + δϕ1,
ϕ2 = φs + δϕ2,
166
получим систему уравнений в вариациях
ϕ
δ
1 +
δϕ1 + cos (φs)δϕ1 = K(δϕ2 - δϕ1),
ϕ
δ
2 +
δϕ2 + cos (φs)δϕ2 = βK(δϕ1 - δϕ2).
Введем новую величину η = δϕ2 - δϕ1, представляющую собой расстройку
приращений фаз в окрестности φs, и получим относительно η дифференци-
альное уравнение
(3)
η+ λη + (cosφs
+ (1 + β)K)η = 0.
Подробный анализ уравнения (3) представлен в [16, 19], где показано, что
существует диапазон значений параметра K (K1 < K < K2), в котором имеет
место неустойчивость синфазного вращательного движения. Значения K1, K2
в рассматриваемом случае определяются выражением
]
2
√
1
[γ
1λ2
(λ4)
(4)
K1,2 =
±2
1-γ2 +
+O
1+β λ2
2γ2
γ4
Внутри интервала ΔK = K2 - K1 возможно существование асинхронных пе-
риодических (разного периода) и хаотических движений. Из (4) следует, что
увеличение асимметрии связи приводит к уменьшению области неустойчиво-
сти синфазного режима. При этом интервал неустойчивости ΔK смещается
в область малых коэффициентов связи K.
4. Поиск регулярных вращательных режимов
Приведем описание численных методов, используемых для поиска регу-
лярных вращательных движений, существующих в базовой модели (2), и
определения их линейной устойчивости. Для начала отметим, что излагае-
мая ниже процедура является фактически модификацией схемы нахождения
замкнутых предельных циклов в нелинейных динамических системах и ис-
пользует методы, изложенные в [20]. Введем обозначение {ϕn(t)} здесь и
далее вектор-строка, где n = 1, 2. Основная идея этого метода заключает-
ся в следующем. Любой представитель {ϕn(t)}, искомого класса траекторий
характеризуется прежде всего своим периодом T (который, неизвестен и дол-
жен быть найден в конце вычислительной процедуры) и числом k, опреде-
ляющим то, сколько раз каждая составляющая из набора циклических коор-
динат {ϕn(t)} изменится на 2π за промежуток времени T . Основываясь на
этом, рассмотрим отображение {ϕn(0),ϕ˙n(0)} → {ϕn(T ),ϕ˙n(T )} и сконструи-
руем следующий вектор:
p(T, {ϕ0n,ϕ˙0n}) = {ϕn(T, {ϕ0n,ϕ˙0n}) - ϕ0n - 2πk,ϕ˙n(T, {ϕ0n,ϕ˙0n}) - ϕ˙0n} ,
где {ϕn(t),ϕ˙n(t)} решение системы (2) с начальными условиями {ϕ0n,ϕ˙0n},
т.е. {ϕn(0),ϕ˙n(0)} = {ϕ0n,ϕ˙0n}.
Используя определенную подобным путем многомерную функцию
p(T, {ϕ0n,ϕ˙0n}), можно сформулировать условие, дающее возможность най-
ти {ϕn(t)} и T . Оно состоит в равенстве нулю всех компонент вектора
p(T, {ϕ0n,ϕ˙0n}). В итоге приходим к тому, что необходимо подобрать такие
167
значения T и {ϕn(t)}, которые позволят удовлетворить требованию
(5)
p(T, {ϕ0n,ϕ˙0n
}) = 0.
Другими словами можно сказать, что задача теперь состоит в поиске непо-
движной точки отображения {ϕn(0),ϕ˙n(0)} → {ϕn(T ),ϕ˙n(T )} с учетом цик-
личности {ϕn(t)} [20]. В силу инвариантности системы (2) относительно
трансляции во времени одну из величин {ϕ0n} можно приравнять нулю без
потери общности и сделать тем самым количество неизвестных и число соот-
ношений в (3) одинаковым. Для отыскания корней совокупности уравнений
(3) целесообразно использовать метод Ньютона, так как он обладает высо-
кой эффективностью. Продолжая эти решения по параметру β в интервале
неустойчивости синфазного режима, можно проследить все семейство нетри-
виальных периодических движений и проанализировать их бифуркации.
Для изучения линейной устойчивости произвольных (2π-, 4π-, 8π- и т.д.)
периодических вращательных движений (с учетом цикличности) динамиче-
ской системы (2) введем малые возмущения δϕn(t): {ϕn(t) = φn(t) + δϕn(t)},
где φn(t) рассматриваемое периодическое движение. В результате процеду-
ры линеаризации получим следующие уравнения для возмущений {δϕn(t)}:
δϕ¨1 + λδϕ˙1 + cos(φ1)δϕ1 = K cos(φ2 - φ1)(δϕ2 - δϕ1),
δϕ¨2 + λδϕ˙2 + cos(φ2)δϕ2 = βK cos(φ1 - φ2)(δϕ1 - δϕ2).
Дальнейший анализ может быть проведен в рамках теории Флоке. Устой-
чивость рассматриваемых движений определяется спектром собственных
значений матрицы монодромии (оператора Флоке) M(T ), которая задается
выражением
{δϕn(T),δϕ˙n(T)}T = M {δϕn(0),δϕ˙n(0)}T .
Собственные значения µm (здесь и далее m = 1, 4 ) матрицы M(T ) являются
мультипликаторами Флоке, которые связаны с показателями Флоке qm пери-
одического решения {φn(t)} соотношениями m = exp(iqm). Таким образом,
для определения устойчивости каждого обсуждаемого движения достаточ-
но вычислить µm. Если |µm| ≤ 1 для всех m, тогда вращательный режим
линейно устойчив. Стоит отметить, что одно из собственных значений µm
всегда должно быть строго равным единице, так как {ϕ˙n(t)} принадлежит
семейству периодических движений (с учетом цикличности). Следовательно,
появляется дополнительная возможность проверки того, что найденное с по-
мощью описанной выше процедуры решение {φn(t)} принадлежит обсуждае-
мому классу предельных вращений. Если хотя бы один из мультипликаторов
Флоке µm расположен на комплексной плоскости за пределами единичной
окружности, то вращательный режим является линейно неустойчивым.
5. Несинфазные регулярные и хаотические вращательные режимы
В результате численного моделирования в области параметров, где нет
устойчивости синфазного вращательного движения (см. выражение (4)), бы-
ли исследованы устанавливающиеся вращательные движения и их бифурка-
ции.
168
max(j1, 2)
max(j1, 2)
max(j1, 2)
2,25
2,25
2,25
(а)
(б)
(в)
2,00
2,00
2,00
1,75
1,75
1,75
1,50
1,50
1,50
x
(г)
x
(д)
x
(е)
1,0
1,0
1,0
0,5
0,5
0,5
0
0
0
2
4
6
8
10 b
0
2
4
6
8
10
b
0
2
4
6
8
10 b
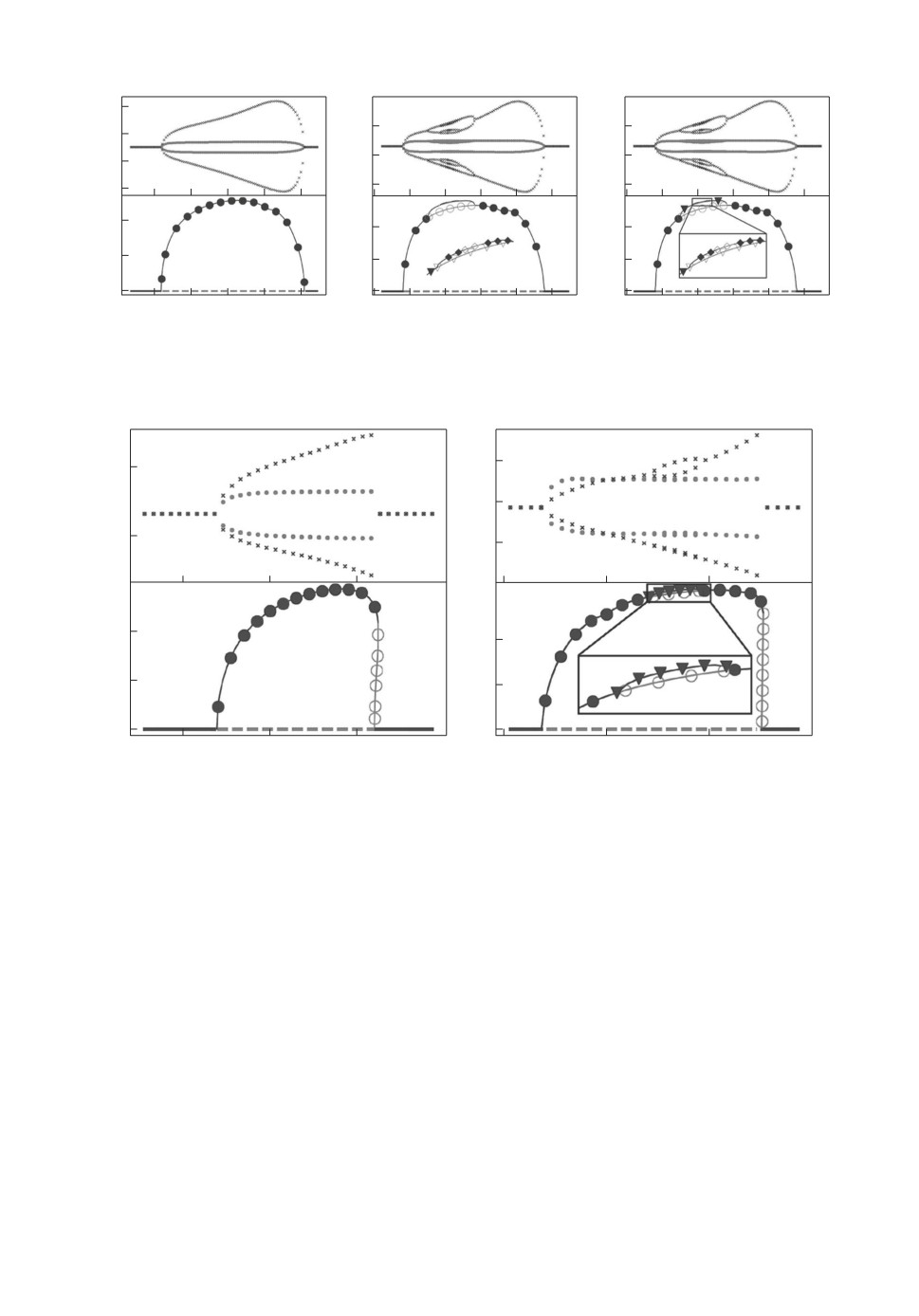
Рис. 2. а, б, в Локальные максимумы ϕ˙1,ϕ˙2. г, д, е Бифуркационные диа-
граммы вращательных режимов.
max(j1, 2)
max(j1, 2)
(а)
(б)
2,25
2,5
2,00
2,0
1,75
x
(в)
x
(г)
1,0
1,0
0,5
0,5
0
0
1
2
3
b
0
1
2
b
Рис. 3. а, б Локальные максимумы ϕ˙1,ϕ˙2. в, г Бифуркационные диаграм-
мы вращательных режимов.
Для того чтобы характеризовать степень отклонения от синфазного режи-
ма, введем величину ξ = max
ϕ1(t) -ϕ˙2(t)|, где T
период вращательных
0<t<T
движений. Здесь и далее параметр внешнего воздействия выберем равным
γ = 0,97.
На рис. 2,а-2,в и рис. 3,а, 3,б изображены локальные максимумы мгно-
венных частот осцилляторов ϕ1(t) и ϕ2(t). Круглыми маркерами отмечены
значения max(ϕ˙1(t)), крестообразными маркерами отмечены max(ϕ˙2(t)). На
рис. 2,г-2,е и рис. 3,в, 3,г изображены зависимости параметра ξ от парамет-
ра β. Закрашенные маркеры соответствуют устойчивым вращательным дви-
жениям, полые маркеры неустойчивым. При этом круговыми, треуголь-
ными и четырехугольными маркерами показаны 4π-, 8π-, 16π-периодические
вращательные режимы соответственно. Линия без маркеров соответствует
синфазному 2π-периодическому вращательному режиму, сплошная устой-
чивому, пунктирная неустойчивому. Для K = 0,06, λ = 0,77 (рис. 2,а, 2,г)
при увеличении параметра β синфазное периодическое вращательное движе-
169
max(j1, 2)
j1, 2(t)
2,2
(а)
2,00
(б)
2,1
1,75
2,0
1,50
1,9
1,25
1,8
1,00
1,7
0,75
1,6
0,50
1,5
0,25
1,4
0
2
4
6
8
10
b
2900
2920
2940
2960
2980
t
Рис. 4. а
Локальные максимумы ϕ˙1,ϕ˙2. б
Режим динамического хаоса
при β = 3,977.
max(j1, 2)
j1, 2(t)
(а)
(б)
2,00
2,2
1,75
2,1
1,50
2,0
1,25
1,9
1,00
1,8
0,75
1,7
0,50
1,6
0,25
1,5
0
0
1
2
b
2900
2920
2940
2960
2980
t
Рис. 5. а
Локальные максимумы ϕ˙1,ϕ˙2. б
Режим динамического хаоса
при β = 1,25.
ние претерпевает бифуркацию удвоения периода при β ≈ 2,3. При этом из
устойчивого синфазного 2π-периодического движения рождается устойчивое
4π-периодическое движение, а 2π-периодическое движение теряет свою устой-
чивость. Затем при β ≈ 10,2 в результате обратной бифуркации удвоения
устойчивое 4π-периодическое движение сливается с неустойчивым синфаз-
ным 2π-периодическим движением, синфазное вращательное движение вновь
становится устойчивым. При λ = 0,8 (рис. 2,б , 2,д) теперь уже несинфаз-
ное 4π-периодическое движение претерпевает бифуркацию удвоения периода,
при этом рождается 8π-периодическое вращательное движение, а 4π-перио-
дическое движение теряет свою устойчивость. Далее при большем значении
параметра диссипации λ = 0,81 (рис. 2,в, 2,е) при увеличении параметра β
система претерпевает несколько бифуркаций удвоения периода, в результа-
те которых увеличивается количество неустойчивых вращательных движе-
170
ний. На рис. 4, 5 изображены локальные максимумы мгновенных частот
ϕ1(t), ϕ2(t). Круглыми (крестообразными) маркерами отмечены значения
max(ϕ˙1(t)) (max(ϕ˙2(t))) (рис. 4,а, 5,a) и временные реализации
ϕ1(t), ϕ2(t)
(рис. 4,б , 5,б ). Пунктирная линия
ϕ1(t), сплошная линия
ϕ2(t). При
λ = 0,816 (рис. 4) наблюдаем, что в результате каскада бифуркаций удвое-
ния периода появляется диапазон значений параметра β (3, 53 < β < 4, 53),
внутри которого в системе наблюдается режим динамического хаоса [21]. Те-
перь рассмотрим случай, когда K = 0,21 и λ = 0,6 (рис. 3,а, 3,в). В результа-
те бифуркации удвоения периода синфазное вращательное движение здесь
также теряет устойчивость при β ≈ 1,39. При этом рождается устойчивое
4π-периодическое движение, отличие которого от синфазного режима воз-
растает с увеличением параметра β. Однако при β > 3,22 система (2) вновь
возвращается к той ситуации, когда устанавливается состояние ϕ1(t) = ϕ2(t).
На бифуркационной диаграмме (рис. 3,в) видно, что такое изменение в по-
ведении модели (2) происходит резким образом при переходе через точку с
β = 3,22. Данный эффект жесткого исчезновения обусловлен существовани-
ем неустойчивого вращательного движения в интервале 3,199 < β < 3,24.
Чтобы проанализировать происходящие смены режимов, рассмотрим за-
висимость параметра ξ от параметра β (рис. 3,а, 3,в). Видно, что кроме устой-
чивых периодических движений, существует также неустойчивое несинфаз-
ное 4π-периодическое движение, которое рождается из синфазного неустой-
чивого 2π-периодического движения в результате субкритической бифурка-
ции удвоения периода (β ≈ 3,199), при этом синфазное 2π-периодическое дви-
жение вновь становится устойчивым. Далее при увеличении параметра β
устойчивое и неустойчивое 4π-периодические вращательные движения сли-
ваются и исчезают в результате седлоузловой бифуркации. При дальнейшем
увеличении параметра β в системе (2) возможен только синфазный враща-
тельный режим. Таким образом, в системе наблюдается эффект бистабильно-
сти вращательных режимов. При λ = 0,71 (рис. 3,б , 3,г) ситуация аналогична
предыдущему случаю: существует 4π-периодическое движение и происходит
бифуркация удвоения периода (β ≈ 1,38), в результате которой рождается
устойчивое 8π-периодическое движение, при этом 4π-периодическое движе-
ние теряет свою устойчивость. При λ = 0,779 (рис. 5) в результате каскада
бифуркаций удвоения периода появляется диапазон значений параметра β
(1,15 < β < 1,35), при которых в системе наблюдается режим динамического
хаоса.
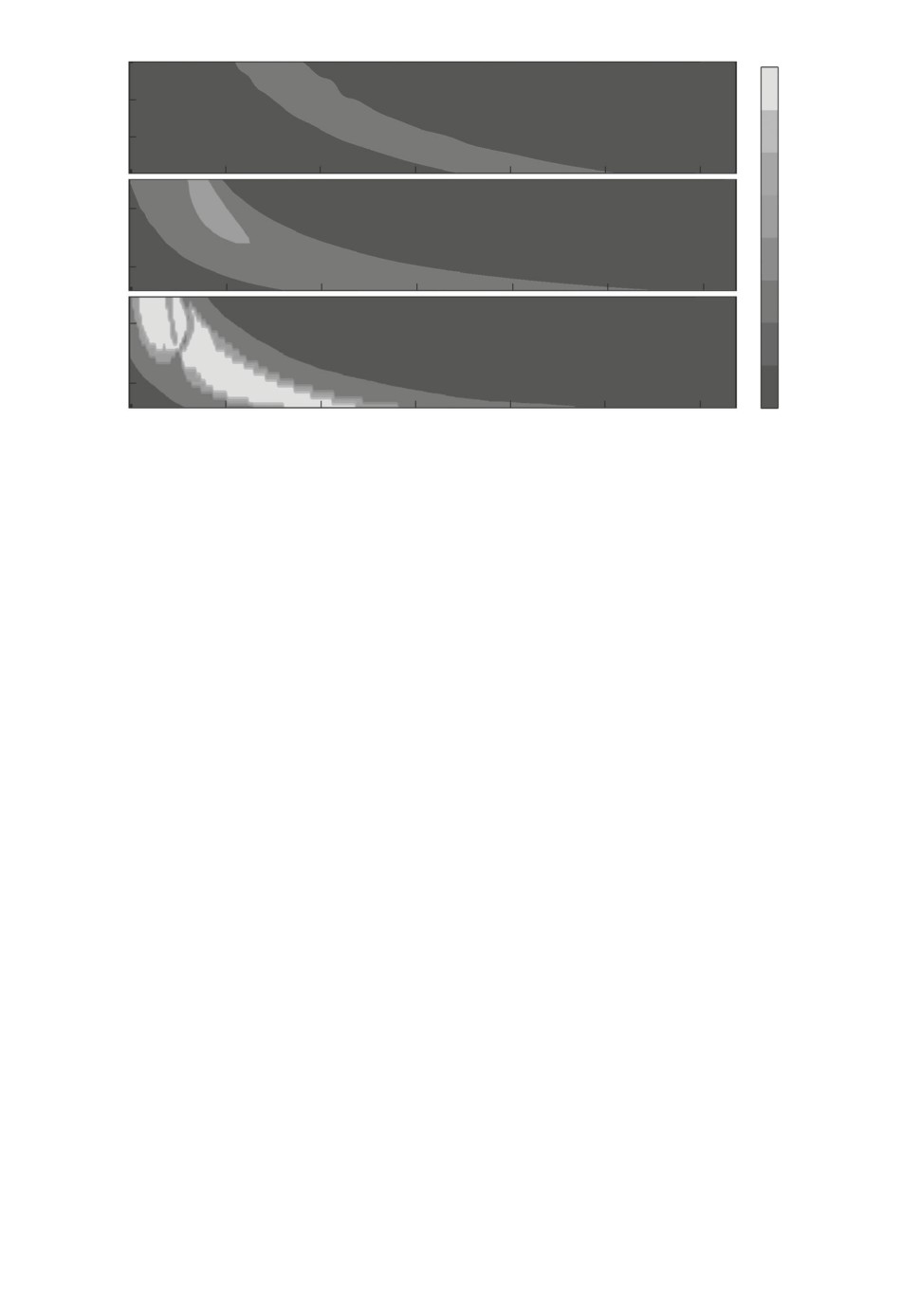
На рис. 6 изображены карты вращательных режимов, показывающие тип
установившегося вращательного движения, реализующегося в системе в за-
висимости от параметров K и β. Рассмотрим случай λ = 0,67 (рис. 6,а), при
этом помимо синфазного вращательного движения в рассматриваемой об-
ласти параметров существует только устойчивый несинфазный 4π-периоди-
ческий вращательный режим. При увеличении λ до значения 0,73 (рис. 6,б )
кроме устойчивого 4π-вращательного режима, при некоторых K и β наблюда-
ется 8π-периодический несинфазный вращательный режим, при этом 4π-вра-
щательное движение теряет устойчивость. При λ = 0,82 (рис. 6,в) в системе
может наблюдаться режим динамического хаоса, возникающий в результате
каскада бифуркаций удвоения периода.
171
K
a
сhaos
0,20
0,15
б
0,20
8p
0,10
4p
в
0,20
0,10
2p
0
2
4
6
8
10
12
b
Рис. 6. Тип вращательных периодических режимов в зависимости от значений
параметров K, β при γ = 0,97. а λ = 0,67, б λ = 0,73,в λ = 0,82.
Заметим, что при малых значениях параметра связи K неустойчивость
синфазного режима возникает при большем значении параметра асиммет-
ричности связи β.
6. Заключение
В работе рассмотрена вращательная динамика в связанных системах фа-
зовой синхронизации. Показано, что в системе с асимметричной связью су-
ществует область значений параметров, в которой синфазное вращательное
движение является неустойчивым, при этом реализуются несинфазные пе-
риодические и хаотические вращения. Аналитически получено, что увели-
чение асимметрии связи приводит к уменьшению области неустойчивости
синфазного режима ΔK = K2 - K1. При этом интервал неустойчивости ΔK
смещается в область малых коэффициентов связи K. Для возникновения
неустойчивости при малых значений параметра связи необходима большая
степень ее асимметричности.
Потеря устойчивости происходит в результате бифуркации удвоения пе-
риода (прямой и обратной). При обратной бифуркации удвоения периода в
системе наблюдается жесткий переход к несинфазному режиму. В случае
больших значений параметра затухания в результате каскада бифуркаций
удвоения периода возникают хаотические вращения.
Описаны численные методы, позволяющие находить и определять линей-
ную устойчивость регулярных вращательных режимов.
СПИСОК ЛИТЕРАТУРЫ
1. Pikovsky A., Rosenblum M., Kurths J. Synchronization. A Universal Concept in
Nonlinear Sciences. England: Cambridge Univer. Press, 2001.
2. Osipov G.V., Kurths J., Zhou Ch. Synchronization in Oscillatory Networks. Ger-
many: Springer Verlag, 2007.
172
3.
Afraimovich V.S., Nekorkin V.I., Osipov G.V., Shalfeev V.D. Stability, Structures
and Chaos in Nonlinear Synchronization Networks. Singapore: World Sci., 1994.
4.
Шалфеев В.Д., Матросов В.В. Нелинейная динамика систем фазовой синхро-
низации. Монография. Нижний Новгород: Изд-во Нижегород. госуниверситета,
2013.
5.
Неймарк Ю.И. Математическое моделирование как наука и искусство. Учеб-
ник. - 2-е изд., испр. и доп. Нижний Новгород: Изд-во Нижегородского госуни-
верситета, 2010.
6.
Kecik K., Warminski J. Dynamics of an Autoparametric Pendulum-Like System
with a Nonlinear Semiactive Suspension // Math. Probl. Engineer. 2011. V. 2011.
No. 451047. P. 1-15.
7.
Yakushevich L.V. Nonlinear Physics of DNA. Germany: Wiley-VCH., 2004.
8.
Homma S., Takeno S. A Coupled Base-Rotator Model for Structure and Dynamics of
DNA: Local Fluctuations in Helical Twist Angles and Topological Solitons // Progr.
Theoret. Physics. 1984. V. 72. No. 4. P. 679-693.
9.
Takeno S., Homma S. Kinks and Breathers Associated with Collective Sugar Puck-
ering in DNA // Progr. Theoret. Physics. 1987. V. 77. No. 3. P. 548-562.
10.
Barone A., Paterno G. Physics and Applications of the Josephson Effect. United
States: John Wiley and Sons Inc., 1982.
11.
Ryu S., Yu W., Stroud D. Dynamics of an underdamped Josephson-junction lad-
der // Phys. Rev. E. 1996. V. 53. No. 3. P. 2190-2195.
12.
Qian M., Wang J.-Z. Transitions in two sinusoidally coupled Josephson junction
rotators // Ann. Physics. 2008. V. 323. No. 8. P. 1956-1962.
13.
Zheng Z., Hu B., Hu G. Spatiotemporal dynamics of discrete sine-Gordon lattices
with sinusoidal couplings // Phys. Rev. 1998. V. 57. No. 1. P. 1139-1144.
14.
Линдсей В. Системы синхронизации в связи и управлении / Под ред. Ю.Н. Ба-
каева, М.В. Капранове. М: Сов. радио, 1978.
15.
Системы фазовой синхронизации / Под ред. В.В. Шахгильдяна, Л.Н. Белюсти-
ной. М: Радио и связь, 1982.
16.
Smirnov L.A., Kryukov A.K., Osipov G.V., Kurths J. Bistability of rotational modes
in a system of coupled pendulums // Regul. Chaotic Dyn. 2016. V. 21. No. 7-8.
P. 849-861.
17.
Хрисанфова С.О., Кадина Е.Ю., Губина Е.В., Коган Л.В., Осипов Г.В. Динами-
ка системы двух нелинейно связанных маятников // Прикладная нелинейная
динамика. 2016. № 3. C. 4-20.
18.
Kemeth F.P., Haugland S.W., Krischer K. Cluster singularity: The unfolding of
clustering behavior in globally coupled Stuart-Landau oscillators // Chaos: An In-
terdisciplinary J. Nonlinear Sci. 2019. V. 29. No. 2. P. 023107.
19.
Bolotov M.I., Munyaev V.O., Kryukov A.K., et al. Variety of rotation modes in a
small chain of coupled pendulums // Chaos: An Interdisciplinary J. Nonlinear Sci.
2019. V. 29. No. 3. P. 033109.
20.
Неймарк Ю.И. Метод точеченых отображений в теории нелинейных колебаний.
М: Наука, 1972.
21.
Неймарк Ю.И., Ланда П.С. Стохастические и хаотические колебания. М: Наука,
1987.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 23.07.2019
После доработки 18.10.2019
Принята к публикации 30.01.2020
173