Автоматика и телемеханика, № 11, 2021
© 2021 г. Б.В. КУПРИЯНОВ, канд. техн. наук (kuprianovb@mail.ru),
А.А. ЛАЗАРЕВ, д-р физ.-мат. наук (jobmath@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ОПТИМИЗАЦИЯ РЕКУРСИВНОГО КОНВЕЙЕРА СВЕДЕНИЕМ
К ЗАДАЧЕ УДОВЛЕТВОРЕНИЯ ОГРАНИЧЕНИЙ1
Рассматривается задача оптимизации расписания рекурсивного кон-
вейера. Для этого вводится определение конвейера, описываемого связ-
ным ациклическим графом, каждая вершина которого представляет со-
бой операцию или функцию управления, ассоциированную с соответст-
вующей рекурсивной функцией из некоторого конечного набора. Каж-
дая рекурсивная функция определяет отношение предшествования опе-
рации конвейера. Рассматривается решение задачи минимизации времени
выполнения заказа конвейером на конечном множестве возобновляемых
ресурсов. Решение осуществляется сведением к задаче удовлетворения
ограничений.
Ключевые слова: теория расписаний, балансировка конвейера, flow-shop
задачи, задача удовлетворения ограничений.
DOI: 10.31857/S0005231021110052
1. Введение
Задачи RCPSP (Resource-Constrained Project Scheduling Problem) являют-
ся одними из основных в теории расписаний. В задачах RCPSP задано множе-
ство заказов, которые необходимо обслужить на конечном множестве машин
(далее по тексту ресурсов). Заказ тождественен множеству упорядоченных
операций и характеризуется временем выполнения. Необходимо минимизи-
ровать время выполнения заказов на множестве распределений ресурсов по
операциям. Данного вида задачи актуальны и для конвейерных систем [1].
Работы, которые рассматривают методы балансировки сборочного конвейе-
ра и планирования ресурсов на этапе проектирования конвейера, приведены
в [2]. В [3] приводятся комплексный обзор и анализ различных методов про-
ектирования и планирования конвейерных систем. Большинство работ по-
священо балансировке сборочного конвейера (ALB). Для ALB модели пред-
ложены методы поиска оптимальных решений с использованием линейного
программирования [4, 5] и целочисленного программирования [6]. Из совре-
менных работ по оптимизации планирования ресурсов для типовых задач
теории расписаний представляют интерес работы [7-10].
Важно отметить две особенности постановки таких задач.
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 20-58-S52006).
75
33
а
б
1
2
3
p11 = 1
p22 = 2
33
22
{m1}
{m2, m3}
{m3, m4}
p23 = 2
p33 = 2
p34 = 2
33
33
22
в
г
t
t
33
34
22
33
22
34
33
23
34
22
11
11
33
34
22
33
22
11
11
11
11
34
22
23
33
22
11
11
11
11
22
22
11
11
11
11
k
k
Рис. 1. Пример двух методов распределения ресурсов конвейера.
Первая состоит в том, что ресурсы распределяются до процесса выполне-
ния заказа и на весь процесс выполнения. Это приводит к тому, что каждый
ресурс закреплен за какой-либо одной операцией, даже если он может потен-
циально использоваться несколькими операциями. Однако можно показать
на примере, что “перебрасывание ресурса” с одной операции на другую может
привести к построению более эффективного расписания. На рис. 1,а показана
модель конвейера из трех последовательно выполняемых операций. Под опе-
рациями в фигурных скобках указаны потенциально используемые ресурсы
из множества {m1, m2, m3, m4}. На рис. 1,б указаны длительности операций
76
при использовании различных ресурсов. Первый индекс — номер операции,
второй индекс — номер ресурса. На рис. 1,в и 1,г показаны временные диа-
граммы выполнения операций для семи заказов. По оси абсцис номер заказа,
по оси ординат время. Отрезок с индексом i, j определяет временной интер-
вал выполнения i-й операции с использованием j-го ресурса для k-го заказа.
На рис. 1,г показана оптимальная диаграмма с закреплением ресурса за опе-
рацией на все время выполнения заказов, а на рис. 1,в диаграмма с распре-
делением ресурсов без закрепления за операциями. Из сравнения диаграмм
видно преимущество по времени второго метода.
Вторая особенность состоит в использовании ограниченного набора отно-
шений предшествования. Это отношение предшествования между операция-
ми и определяемое с помощью предиката and.
В данной статье предлагается решение, преодолевающее оба эти ограни-
чения. Рассматривается распределение ресурсов с возможностью использо-
вания одного ресурса несколькими операциями и с расширением отношений
предшествования с помощью рекурсивных функций. Задачи Удовлетворения
Ограничений (ЗУО) и методы Constraint Programming [11-13] наряду с про-
чим используются для решения задач теории расписаний. В данной работе
рассматривается решение задачи RCPSP сведением ее к ЗУО применительно
к конвейерам, описываемым рекурсивными функциями [14]. Время выполне-
ния операции i зависит от используемого ресурса j, т.е. равно pij. Примеры
описания возможностей и применения таких конвейеров приведены в [15].
Статья имеет следующую структуру. В разделе 2 приведено определение
рекурсивного конвейера. Подробно описаны рекурсивные функции. В разде-
ле 3 приведены примеры рекурсивных конвейеров. В разделе 4 описывается
определение ЗУО и задача распределения ресурсов конвейера формулиру-
ется как ЗУО. Раздел 5 является заключением, в котором рассматривается
проблема сложности алгоритма решения поставленной в статье ЗУО.
2. Определение конвейера
Модель и свойства рекурсивного конвейера подробно рассмотрены в
[14, 16]. Однако они описаны в предположении, что за каждой операцией
закреплен свой ресурс на время выполнения всех заказов. В данном разделе
определение рекурсивных функций конвейера дано с учетом распределения
ресурса для каждой пары (операция, заказ).
Модель конвейера представляет собой связный ациклический ориентиро-
ванный граф G = (V, A) с единственной конечной вершиной. V - множество
вершин графа и n - количество вершин. A - множество дуг графа, упоря-
доченных пар вида (v, w), где v, w ∈ V . Вершины графа помечены номерами
из множества I = {1, . . . , n} таким образом, что первые n0 (1 ≤ n0 < n) вер-
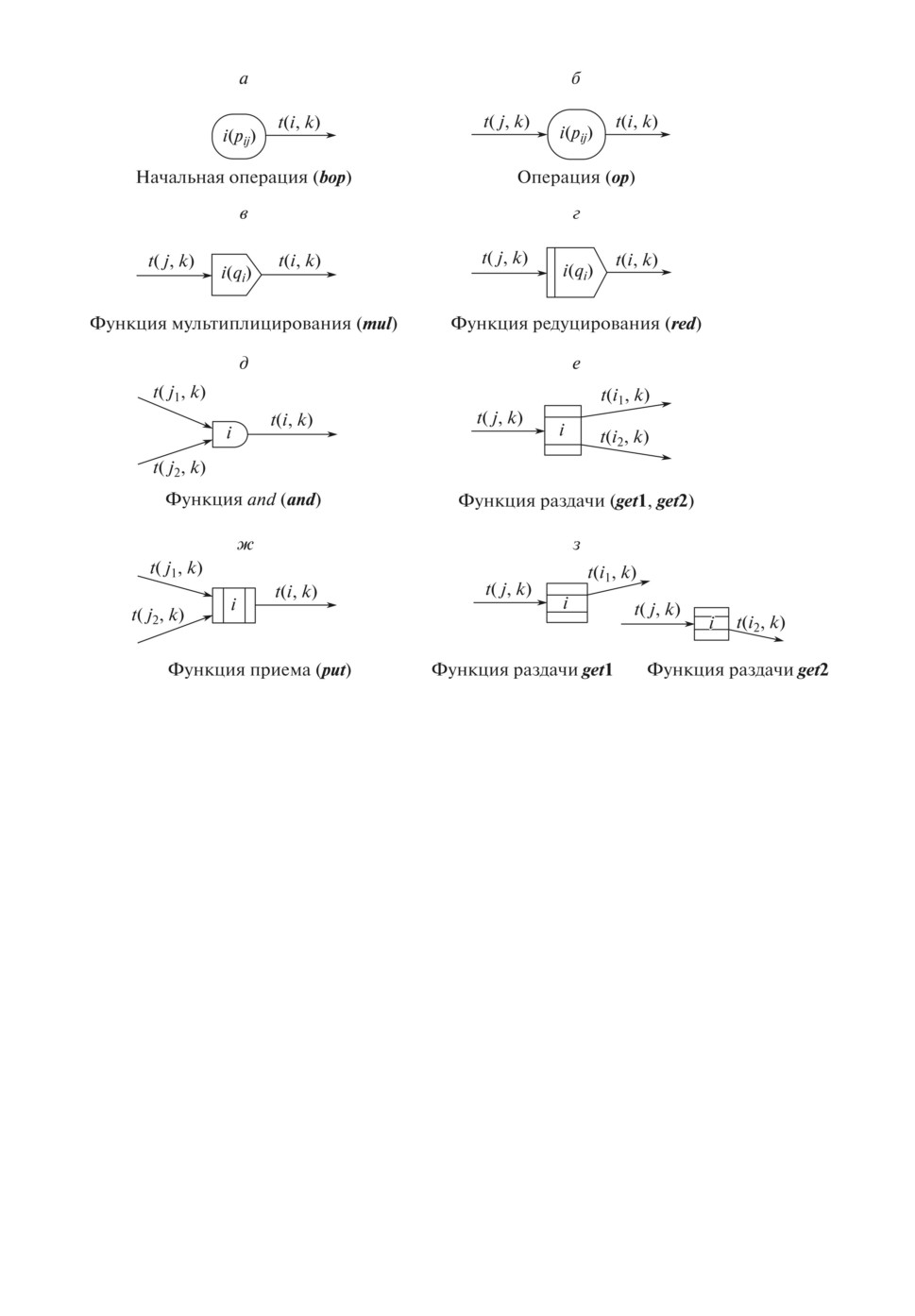
шин являются начальными, а вершина n конечной. Графическое изображение
вершин и дуг графа представлено на рис. 2. Здесь i, j, j1, j2 - номера опера-
ций (вершин), k - номер заказа, pi,j - время выполнения i-й операции при
использовании j-го ресурса и qi - коэффициент мультиплицирования или ре-
77
Рис. 2. Графическая нотация операций и спусковых функций конвейера.
дуцирования. Каждая вершина графа может иметь одну входную дугу (см.
рис. 2 варианты б,в,г,е) или две (см. рис. 2 варианты д,ж) в зависимости от
типа вершины. На множестве номеров вершин графа определены функции
предшествования pred, pred1, pred2 : I → I.
Функция pred(i) определена для вершины, имеющей одну предшествую-
щую вершину и вычисляет номер j вершины графа такой, что (j, i) ∈ A.
Следующие две функции определены для вершин, имеющих две предше-
ствующие вершины, условно вершина 1 и вершина 2:
pred1(i) - вычисляет номер j1 вершины 1 графа такой, что существует
дуга (j1, i) ∈ A;
pred2(i) - вычисляет номер j2 вершины 2 графа такой, что существует
дуга (j2, i) ∈ A.
Каждая вершина графа может соответствовать операции или спусковой
функции. Операции ассоциированы с производственными операциями. Спус-
ковые функции определяют отношения временного предшествования опера-
ций. Вершины графа помечены с помощью отображения
type : I → E, где E = {bop,op,and,mul,red,get1,get2,put}
78
на множество из восьми элементов. Каждая константа множества E обо-
значает тип вершины графа, а вершина имеет соответствующую графи-
ческую нотацию (рис. 2). Конвейер использует множество ресурсов M =
= {m1, . . . , mr}. Каждая операция i потенциально может использовать ре-
сурсы из некоторого множества Di ⊆ M. Для каждого 1 ≤ i ≤ n определим
переменную xik на множестве Di. Если xik = mj, то операция i при выпол-
нении k-го заказа использует ресурс mj ∈ Di. Время выполнения операции
равно pij и является константой. В каждый момент времени каждый ресурс
может использоваться только одной операцией. Прерывания операций запре-
щены.
Спусковые функции ресурсы не потребляют, и время их выполнения рав-
но 0.
Расписание выполнения операций строится с помощью рекурсивных функ-
ций R : I × K × M → T , где K-конечное множество номеров заказов, а
T -время.
Например, рекурсивная функция
t(i, k) = r1(t(i, k - 1), t(j, k), pil)
или
t(i, k) = r2(t(i, k - 1), t(j1, k), t(j2, k), pil),
где j = pred(i), j1 = pred1(i), j2 = pred2(i), вычисляет время завершения об-
работки i-й операцией k-го заказа при k ∈ K исходя из времени завершения
ею обработки (k - 1)-го заказа и из времен завершения обработки k-го заказа
предшествующими операциями. Рекурсивные функции имеют два аргумента:
i - номер операции (номер вершины графа) и k - номер заказа. Для каждого
типа вершины, т.е. элемента множества E, своя рекурсивная функция.
Рекурсивная функция t(i, k), вычисляемая по формуле (1), обеспечивает
суперпозицию рекурсивных функций, соответствующих вершинам графа, и
является обращением к одной из них в соответствии с типом вершины.
⎧
⎪
bop(i, k), если type(i) = bop;
⎪
⎪
op(i, k),
если type(i) = op;
⎪
⎪
⎪
and(i,k),
если type(i) = and;
⎨
mul(i,k), если type(i) = mul;
(1)
t(i, k) =
⎪
red(i, k), если type(i) = red;
⎪
⎪
get1(i, k), если type(i) = get1;
⎪
⎪
⎪
get2(i, k), если type(i) = get2;
⎩
put(i,k), если type(i) = put.
Вычисление времени завершения выполнения k-го заказа конвейером осу-
ществляется обращением к рекурсивной функции t(n, k).
Далее описываются все виды вершин: их назначение, тип и соответствую-
щая типу рекурсивная функция.
79
1. Начальная производственная операция (см. bop рис. 2,а) с номером 1 ≤
≤ i ≤ n0 характеризуется временем выполнения k-го заказа pij, если операция
использует ресурс mj (xik = mj). Время завершения выполнения данной опе-
рацией k-го заказа определяется как время завершения выполнения (k-1)-го
заказа плюс время выполнения операции pij . Если операция при выполнении
k-го и (k-1)-го заказа использует разные ресурсы, то времена их выполнений
совмещаются. Время выполнения нулевого заказа равно pij .
(2) bop(i, k) :
⎧
⎪
pij,
⎪
⎪
если (xik = mj )&(k = 0);
а)
⎨
bop(i, k - 1) + pij,
bop =
⎪
если (xik = xi,k-1)&(xik = mj)&(k > 0);
б)
⎪
⎪
op(i, k - 1) + pij - pil,
⎩ b
если (xik = xi,k-1)&(xi,k-1 = ml)&(xik = mj)&(k > 0).
в)
2. Не начальная производственная операция (см. op рис. 2,б ) с номе-
ром n0 < i характеризуется временем выполнения pij, если используется ре-
сурс mj. Время завершения выполнения данной операцией k-го заказа опре-
деляется как максимум времен: завершения выполнения данной операцией
(k - 1)-го заказа и завершения выполнения предшествующей ей операцией
k-го заказа и плюс время выполнения операции pij. При этом начала выпол-
нений i-й операцией k-го и (k-1)-го заказов совмещаются, если для выполне-
ния используются разные ресурсы. Время выполнения нулевого заказа равно
времени выполнения нулевого заказа предшествующей операцией плюс pij.
(3) op(i, k) :
⎧
⎪
t(pred(i), k) + pij, если (xik = mj)&(k = 0);
а)
⎪
⎪
t(pred(i), k) + pij,
⎪
⎪
если (t(pred(i), k) ≥ t(i, k - 1))&(xik = mj)&(k > 0);
б)
⎪
⎨
t(pred(i), k) + pij,
op =
если (t(pred(i), k) < t(i, k - 1))&
⎪
⎪
&(xik = xi,k-1)&(xik = mj)&(k > 0);
в)
⎪
⎪
t(i, k - 1) + pij,
⎪
⎪
сли (t(pred(i), k) < t(i, k - 1))&
⎩ е
&(xik = xi,k-1)&(xik = mj)&(k > 0).
г)
3. Спусковая функция and (см. and рис. 2,д) вычисляет время завершения
выполнения k-го заказа для двух предшествующих операций.
(4)
and(i,k) : and = max(t(pred1(i),k),t(pred2(i),k)).
4. Спусковая функция мультиплицирования (см. mul рис. 2,в) для каждо-
го времени завершения предшествующей ей операции вычисляет qi времен
80
завершения операции i. Это означает, что на одно выполнение предшествую-
щей i операции осуществляется qi (qi ≥ 1) выполнений операции i.
(5)
mul(i,k) : mul = t(pred(i),⌊k/qi
⌋),
где ⌊x⌋ обозначает целую часть x.
5. Спусковая функция редуцирования (см. red рис. 2,г) является обратной
по отношению к функции мультиплицирования и вычисляет время заверше-
ния выполнения очередной партии из qi (qi ≥ 1) заказов.
(6)
red(i, k) : red = t(pred(i), (k + 1)qi
− 1).
6. Спусковая функция раздачи (см. get рис. 2,е) имитирует разделение
конвейерных операций на два потока. Для пользователя она выступает как
одна функция, а в реализации она разбивается на две (условно верхнюю и
нижнюю) см. рис. 2,з. Для верхнего варианта спусковая функция get1 вычис-
ляет времена завершений четных заказов, т.е. t(i, 0) = t(p, 0), t(i, 1) = t(p, 2),
t(i, 2) = t(p, 4), . . .
(7)
get1(i, k) : get1 = t(pred(i), 2k), k ≥ 0.
Для нижнего вычисляет времена завершения выполнения нечетных заказов,
т.е. t(j, 0) = t(p, 1), t(j, 1) = t(p, 3), t(j, 2) = t(p, 5), . . .
(8)
get2(i, k) : get2 = t(pred(i), 2k + 1), k ≥ 0.
7. Спусковая функция приема (см. put рис. 2,ж) является обратной
по отношению к функции раздачи и имитирует слияние двух конвейеров
в один. Проще всего это пояснить последовательностью значений t(i, k):
t(i, 0) = t(p, 0), t(i, 1) = t(q, 0), t(i, 2) = t(p, 1), t(i, 3) = t(q, 1), t(i, 4) = t(p, 2),
t(i, 5) = t(q, 2), . . .
⎧
⎪
t(pred1(i), k),
⎪
⎪
если k = 0;
⎨
max(put(i, k - 1), t(pred2(i), k/2)),
(9)
put(i,k) : put =
⎪
если (k mod 2 = 0)&(k > 0);
⎪
⎪
ax(put(i, k - 1), t(pred1(i), (k - 1)/2)),
⎩m
если k mod 2 = 1.
Здесь x mod y - вычисление остатка от деления x на y.
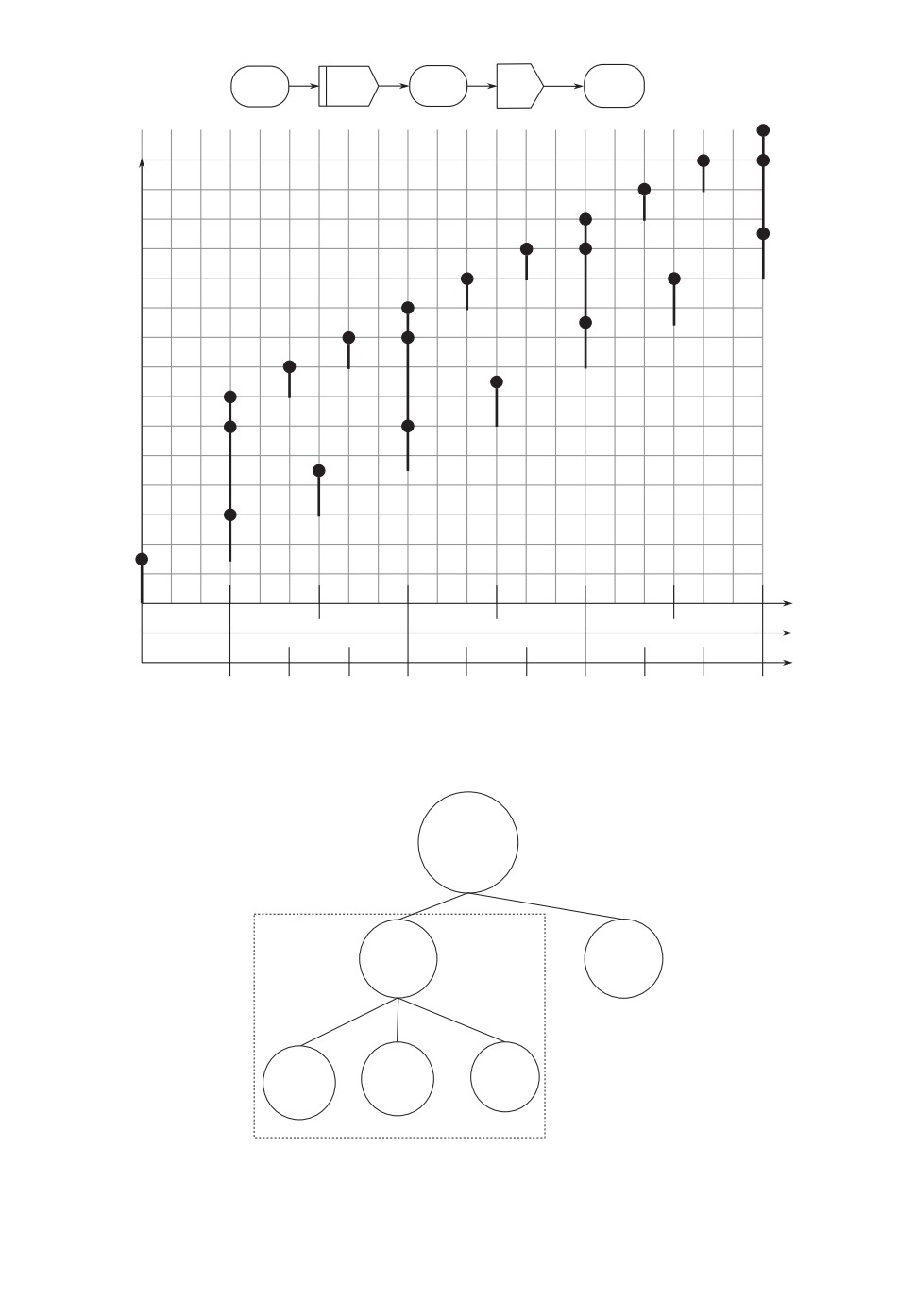
На рис. 3 представлен пример графа конвейера и соответствующей супер-
позиции рекурсивных функций для случая, когда каждой операции выделен
один ресурс на все время процесса. В реальности такой граф не строится, он
является результатом процесса вычисления рекурсивной функции t(i, k).
Время начала функционирования конвейера полагается равным 0.
В предлагаемой модели интерпретация операций и спусковой функции and
не отличается от таковых в теории расписаний. Остальной набор спусковых
функций выработан практикой, на основе построения моделей и является
двумя парами прямых и обратных функций (mul-red и get-put). Возможно
построение новых функций, расширяющих отношение предшествования.
81
Рис. 3. Пример графа конвейера (сверху) и соответствующего графа суперпо-
зиции рекурсивных функций (снизу).
3. Примеры моделей
Примеры некоторых моделей конвейеров для различных приложений опи-
саны в [15]. В данной статье приведем дополнительные примеры рекурсивных
конвейеров. Перед тем как привести примеры, отметим, что временная диа-
грамма должна составляться для каждой операции отдельно, это ненаглядно
p = 1
p = px
and
and
4
and
q = pai
s = s + q
4
i = i + 1
s = a0
i = 0
t
s = s + q
s = s + q
q = pai
s = s + q
q = pai
p = px
i = i + 1
s = s + q
q = pai
p = px
i = i + 1
q = pai
p = px
i = i + 1
p = px
i = i + 1
s = a0
p = 1
i = 0
k
Рис. 4. Пример модели вычислительного конвейера и временной диаграммы.
82
1
2
2
3
3
3
t
3
2
3
3
1
3
3
2
1
3
3
1
3
2
3
1
1
2
1
1
1
k1
k2
k3
Рис. 5. Пример простого конвейера с функциями мультиплицирования и ре-
дуцирования.
Основное
изделие
Узел 2
Узел 3
Узел 5
Узел 6
Узел 4
Рис. 6. Структура сборочного изделия.
83
и громоздко, диаграммы будут совмещены в одной. По оси абсцисс будут от-
ложены номера заказов, а по оси ординат время. Некоторые отрезки времени
при таком совмещении в одной диаграмме будут сливаться. Чтобы этого не
происходило, отрезки, имеющие по оси абсцис значение k, будут размещаться
в интервале между делениями k и (k + 1).
Пример 1. На рис. 4 представлена модель конвейера, вычисляющего по-
лином
p=a0 +a1x1 +a2x2 +a3x3 +a4x4,
и соответствующая временная диаграмма в предположении, что каждая опе-
рация выполняется своим процессором. Времена выполнения всех операций
равны 1.
Пример 2. Прежде чем рассмотреть второй пример, разберем вспомога-
тельный. На рис. 5 представлен пример конвейера и его временной диаграм-
мы. Конвейер состоит из трех операций, функции редуцирования с коэффи-
циентом 2 и функции мультиплицирования с коэффициентом 3. На диаграм-
ме видно, что все операции выполняются с разной кратностью, но процесс
является конвейерным. Чтобы понять, что такой конвейер может иметь ме-
сто на практике, рассмотрим пример конвейерной сборки некоторого изделия,
которое имеет структуру, представленную на рис. 6. Особенность сборки со-
стоит в том, что узел 2 и узел 3 собираются в отдаленном от основной сборки
месте. Поэтому на месте собирается партия из q2 узлов, которая потом пе-
ревозится на склад основного производства. Аналогично узел 3 собирается
в другом отдаленном месте и перевозится партиями по q3 узлов. Требуется
составить расписание: производства узлов, хранения на складе, перевозки и
сборки основного изделия как единого конвейерного процесса. Пример мо-
дели такого процесса приведен на рис. 7. Суть ее в том, что узел 2 по мере
конвейерной сборки накапливается на складе в количестве q2 и потом эта
партия доставляется на место основной сборки. Конвейерность этого про-
цесса позволяет описывать функции редуцирования и мультиплицирования.
Аналогично для узла 3.
4. Постановка задачи
В данном разделе рассматривается рекурсивный конвейер, представлен-
ный в виде ациклического связного графа, для которого необходимо рас-
пределением ресурсов минимизировать время выполненияk заказов, гдеk -
некоторая константа. Данная RCPSP задача сводится к минимизации функ-
ции t(n,k) для заданногоk на конечном множестве ресурсов M. Опишем
формулировку постановки ЗУО для дискретных переменных с конечными
множествами значений.
В теории ЗУО [11] представляет собой четверку (V, D, R, C),
где V = {x1, . . . , xn} - множество переменных,
D = {D1,...,Dn} - множество доменов переменных,
R - множество отношений различной арности над областями D,
C = {C1,...,Cm} - множество ограничений, связывающих множество
значений переменных из V посредством отношений из R.
84
Решением ЗУО является нахождение таких значений всех переменных
множества V , которые удовлетворяют всем ограничениям. Решений ЗУО мо-
жет быть одно или несколько.
ЗУО может быть представлена в виде сети ограничений. Было бы есте-
ственно в качестве такой сети взять граф модели конвейера, в котором вер-
шине соответствует некоторая операция. Однако в связи с тем, что операция i
выполняется k раз при наличии k заказов и в каждом случае может использо-
ваться некоторый ресурс mi, с операцией связано некоторое множество ресур-
сов. Чтобы избежать этой ситуации, сгенерируем из исходного графа модели
для заданногоk развернутый граф, в котором каждой вершине соответствует
пара (номер операции, номер заказа) и сохраняются отношения предшество-
вания. Построение такого графа возможно для любой модели конвейера и не
представляет сложности. Простые примеры таких графов представлены на
рис. 8. Сверху представлен исходный граф модели, а ниже граф для конкрет-
ного значенияk. Вершины графов помечены соответствующими рекурсивны-
ми функциями и ассоциируются с конкретными операциями и заказами. Если
исходный граф имеет n вершин (операций), то новый граф имеет nk вершин.
Легко показать, что развернутый граф так же является ациклическим. Оче-
видно, что в этом случае каждой вершине соответствует один ресурс, если
вершина соответствует операции (тип вершины bop или op). В остальных
случаях, когда вершина соответствует спусковой функции, ресурс не исполь-
зуется. Для отражения этого факта в задаче дополним множество ресурсов
нулевым элементом M = {m0, m1, . . . , mr}.
Перенумеруем вершины развернутого графа некоторым способом. Пусть
I′ = {1,... ,n′}, n′ = nk, - множество новых номеров. Будем считать по умол-
чанию, что i′ ∈ I′ обозначает номер вершины нового графа и существуют
отображения ψ : I′ → I и ϕ : I′ → K. Если в исходном графе существует пред-
шествование по i, то в развернутом графе существует как предшествование
по i, так и по k. Определим эти две функции. Функция pk : I′ → I′ вычис-
ляет предшествующую по k вершину, т.е. если i′′ = pk(i′), то ψ(i′) = ψ(i′′), а
ϕ(i′′) = ϕ(i′) - 1. Функция pi : I′ → I′ вычисляет предшествующую по i вер-
шину, т.е. если i′′ = pi(i′), то ψ(i′′) = pred(ψ(i′)), а ϕ(i′′) = ϕ(i′). Далее для
упрощения записи в выражениях будут использоваться обе нумерации: сквоз-
ная со штрихом и двухкоординатная (i, k) без штриха в предположении, что
i′ → (i,k), i = ψ(i′) и k = ϕ(i′).
Перенесем приведенную постановку ЗУО в рассматриваемую область тео-
рии расписаний.
Четверка объектов ЗУО будет определена следующим образом:
1) V = {x1, . . . xn′ } - множество дискретных переменных и для каждой из
них определено множество значений.
2) Di′ = Di - домен переменной xi′ , связанный с соответствующей i-й вер-
шиной исходного графа, т.е. i′ → (i, k). При этом следует иметь в виду, что
для каждой вершины i′ - спусковой функции соответствующие перемен-
ные xi′ будут определены на доменах Di = {m0}, содержащих один нулевой
ресурс. Данный факт существенно сокращает пространство поиска.
86
3) R ⊆ (D1 × D2 × . . . × Dn′ ).
4) C - множество ограничений, которое делится на несколько групп.
Множество ограничений представляет собой в основном множество рекур-
сивных функций производных от рекурсивных функций операций. Модифи-
кации вызваны переходом к развернутому графу и связанной с этим заме-
ной переменных. Данные функции порождают ограничения, обусловленные
допустимыми расписаниями для каждой операции конвейера при некотором
заданном распределении ресурсов для пар (операция, заказ). Последнее усло-
вие проверяет допустимость расписания с точки зрения того, чтобы ресурс в
некоторый момент времени не использовался двумя операциями.
1-я группа — это множество унарных ограничений, определенных для на-
чальных операций (1 ≤ i ≤ n0) и построенных на основе функции (2).
⎧
⎪pij,
⎪
если (xi′ = mj)&(k = 0);
⎪
⎨
bop(i, k - 1) + pij ,
bop(i, k) =
если (xi′ = xpk(i′))&(xi′ = mj)&(0 < k ≤k);
⎪
⎪
⎪bop(i, k - 1) - pij + pil,
⎩
если (xi′ = xpk(i′))&(xi′ = ml)&(xpk(i′) = mj)&(0 < k ≤k).
2-я группа — это множество бинарных ограничений, определенных для пары
вершин графа, соединенных дугой и построенных на основе функций (3),
(5)-(8).
⎧
⎪t(pred(i), k) + pij,
⎪
⎪
если (type(i) = op)&
⎪
⎪
&(xi′ = mj)&(k = 0);
⎪
⎪t(pred(i), k) + pij,
⎪
⎪
если (type(i) = op)&(t(pred(i), k) ≥ t(i, k - 1)&
⎪
⎨
&(xi′ = mj)&(0 < k ≤k);
op(i, k) =
⎪t(pred(i), k) + pij,
⎪
⎪
если (type(i) = op)&(t(pred(i), k) < t(i, k - 1)&
⎪
⎪
&(xi′ = xpk(i′))&(xi′ = mj )&(0 < k ≤k);
⎪
⎪
t(i, k - 1) + pij,
⎪
⎪
если (type(i) = op)&(t(pred(i), k) < t(i, k - 1)&
⎪
⎩
&(xi′ = xpk(i′))&(xi′ = mj )&(0 < k ≤k).
mul(i,k) = t(pred(i),⌊k/qi⌋), если (type(i) = mul)&(0 ≤ k ≤k);
red(i, k) = t(pred(i), (k + 1)qi - 1), если (type(i) = red)&(0 ≤ k ≤k);
get1(i, k) = t(pred(i), 2k),
если (type(i) = get1)&(k mod 2 = 0)&(0 ≤ k ≤k);
get2(i, k) = t(pred(i), 2k + 1),
если (type(i) = get2)&(k mod 2 = 1)&(0 ≤ k ≤k).
87
3-я группа
— это множество ограничений, определенных для тройки вер-
шин графа и построенных в соответствии с функциями (4) и (9).
and(i,k) = max(t(pred1(i),k),t(pred2(i),k)), если (type(i) = and).
⎧
⎪
t(pred1(i), k),
⎪
⎪
если (type(i) = put)&(k = 0);
⎪
⎪
⎪
max(put(i, k - 1), t(pred2(i), k/2)),
⎨
если (type(i) = put)&
put(i,k) =
⎪
&(k mod 2 = 0)&(0 < k ≤k);
⎪
⎪
⎪
max(put(i, k - 1), t(pred1(i), (k - 1)/2)),
⎪
⎪
если (type(i) = put)
⎩
&(k mod 2 = 1)&(0 < k ≤k).
4-я группа ограничений относится к ограничениям типа all-different. Она
отображает тот факт, что использование ресурса в каждый момент вре-
мени возможно не более чем одной операцией. Введем следующие обозна-
чения:
τi′ = (tbi′ ,tei′ ) обозначает интервал времени от tbi′ до tei′ (tbi′ ≤ tei′), в течение
которого выполняется i-й операцией k-й заказ (i = ψ(i′), k = ϕ(i′)) и ис-
пользуется некоторый ресурс mj . Операция ∩ принимает значение истины,
если временные отрезки пересекаются.
{
true, если (tbi′ < tei′′ ≤ tei′ ) or (tbi′ ≤ tbi′′ < tei′ );
τi′ ∩ τi′′ =
f alse, otherwise.
В этих определениях глобальное ограничение будет выглядеть следующим
образом:
∀i′∀i′′ (1 ≤ i′,i′′ ≤ n′)&(i′ = i′′)&(τi′ ∩ τi′′) ⊢
⊢ ((type(i′) = bop)&(type(i′) = op)) ∨
∨(type(i′′) = bop)&(type(i′′) = op)) ∨
∨(xi′ = xi′′ ).
Cмысл условия в том, что если интервалы двух разных вершин i′ и i′′ пере-
секаются, то либо хотя бы одна из них соответствует спусковой функции,
либо они используют разные ресурсы.
Решением ЗУО будет нахождение таких значений переменных xi′ , при ко-
торых все перечисленные условия будут удовлетворены, и очевидно, что в
данной постановке ЗУО всегда будет иметь некоторое решение. Для любого
допустимого распределения ресурсов можно построить расписание. В ста-
тье требуется оптимальное расписание. Пусть Topt - время выполнения оп-
тимального расписания. Будем полагать, что решение квазиоптимальное с
точностью до некоторой, наперед заданной величины Δ, если найденное ре-
шение T такое, что T - Topt ≤ Δ. Вычисление квазиоптимального значения
времени выполнения расписания можно осуществить с помощью следующего
известного алгоритма:
88
1) Выбрать некоторое множество значений V , равное V0.
Вычислить значение Tmax = t(n′,k) для V0.
Положить Tmin = 0.
2) Если Tmax - Tmin ≤ Δ, то задача решена и Tmax является решением, а со-
ответствующее данному решению множество V является искомым рас-
пределением ресурсов.
3) Вычислить значение T = Tmin + (Tmax - Tmin)/2.
4) Ввести в ЗУО дополнительное ограничение: t(n′,k) ≤ T .
5) Если ЗУО с дополнительным условием не будет иметь решение, то по-
ложить Tmin = T и перейти к п. 3.
6) Если ЗУО с дополнительным условием будет иметь решение, то поло-
жить Tmax = T и перейти к п. 2.
Конец алгоритма.
Найденное значение Tmax является квазиминимальным, но квазиопти-
мальность этого значения следует доказать. Суть проблемы состоит в том,
что рекурсивные функции на локальном уровне строят оптимальное расписа-
ние (реализуют жадный алгоритм), и следует доказать, что при фиксирован-
ном распределении ресурсов локальная оптимизация является и глобальной.
Утверждение 1. Для любого допустимого значения V = {x1,...,xn′}
рекурсивная функция t(i,k) вычисляет одно из оптимальных значений для
1≤i≤n и 0≤k≤k.
Доказательство осуществим методом математической индукции.
Для системности изложения напомним формулировку принципа матема-
тической индукции. Некоторое утверждение P (i), зависящее от натурального
параметра i, считается доказанным, если:
1) установлено, что P (1) верно;
2) для любого 1 ≤ i < n′ из предположения, что P (i) верно, следует, что
P (i + 1) верно.
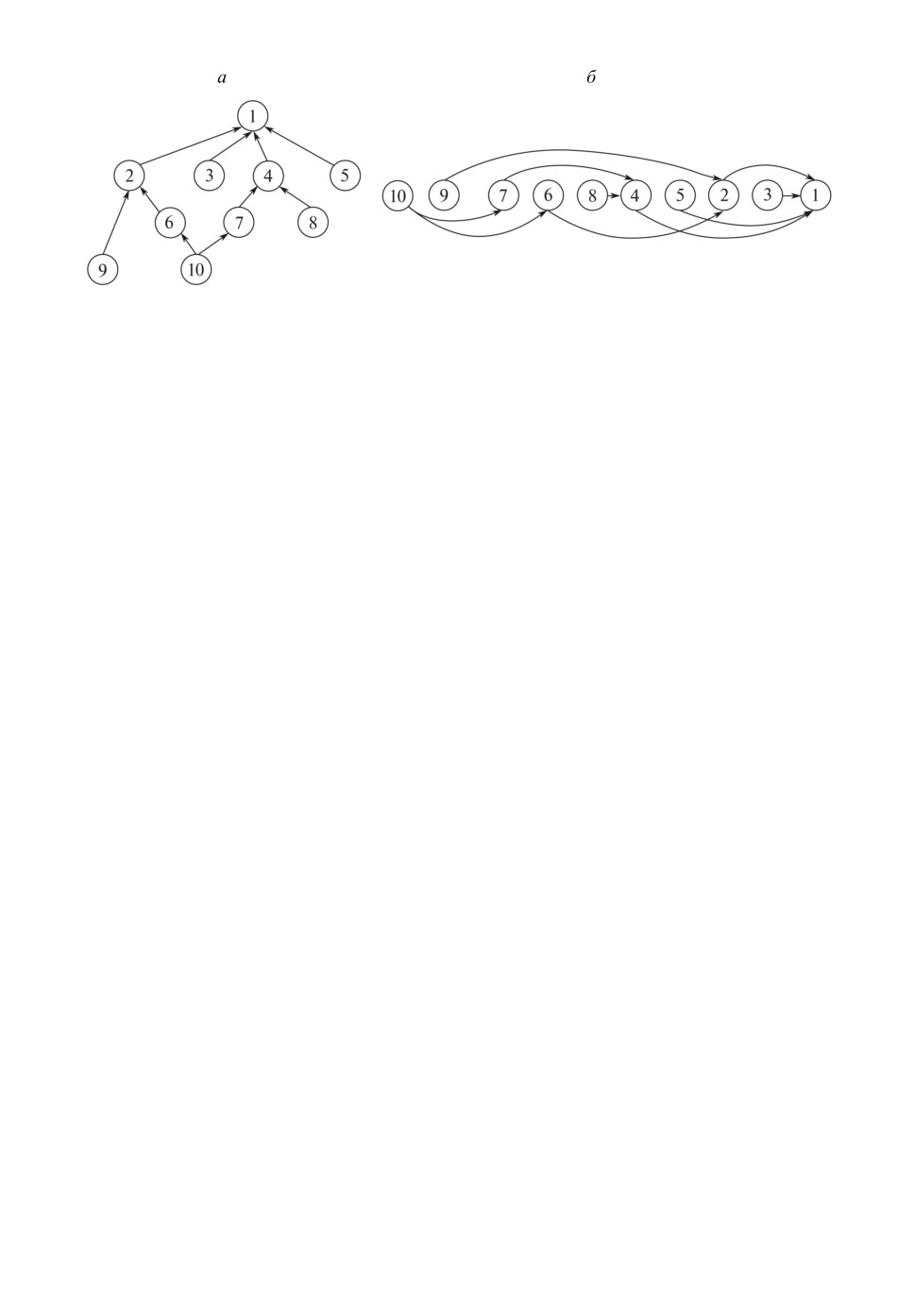
Применим данный метод к развернутому графу. Из теории графов из-
вестно [17], что ациклический граф является строго частично упорядочен-
ным. Существуют алгоритмы построения для строго частично упорядоченно-
го графа некоторого линейного порядка. Неформально линейный порядок —
это когда все вершины графа расположены в строку и все дуги направлены
слева направо. Пример построения линейного порядка из строго частичного
показан на рис. 9, где а) — это исходный ациклический граф, а б ) — один
из возможных линейных порядков. В данной статье устроит любой такой ал-
горитм с условием, что первые n0 вершин исходного графа так и останутся
первыми, хотя можно и в другом порядке, а вершина n останется последней.
При вычислении рекурсивной функции в соответствии с линейным порядком
ее аргументы уже будут вычислены.
Метод математической индукции применим следующим образом.
Шаг 1. Исходя из определения рекурсивного конвейера и способа упо-
рядочивания вершин исходного графа очевидно, что все начальные вершины
89
Рис. 9. Пример линейного порядка графа.
исходного графа являются операциями (не функциями) и являются производ-
ными для начальных вершин развернутого графа. Если в исходном графе n0
начальных вершин, то и в развернутом графе тоже n0 начальных вершин и
для каждой начальной вершины i в исходном графе существует вершина (0, i)
в развернутом графе, которой не предшествует никакая другая вершина. Ес-
ли 1 ≤ i ≤ n0 - некоторая начальная вершина исходного графа, то i′ такая,
что ψ(i′) = i и ϕ(i′) = 0 является начальной вершиной развернутого графа.
Таким образом, для каждой начальной вершины i′ → (i, k) развернутого
графа справедливы следующие утверждения:
type(i) = bop,
1 ≤ ψ(i′) ≤ n0 и ϕ(i′) = 0, т.е.
(1 ≤ i ≤ n0)&(k = 0).
В этом случае в соответствии с функцией (1)
t(i, 0) = bop(i, 0) = pij, если xi′ = mj.
Таким образом, для конкретного значения xi′ значение t(i, 0) единственно
и, следовательно, оно оптимально. Утверждение верно. Поскольку данное
утверждение верно для любой из n0 начальных операций, далее эти варианты
рассматривать не будем.
Шаг 2. Допустим, что для вершины любого номера n0 < i′ < n′ утвержде-
ние верно. Докажем, что в этом случае оно верно и для вершины с номером
i′′ = i′ + 1. В соответствии с (1) возможны 8 вариантов.
Рассмотрим варианты 1 и 2, когда
type(i′′) = bop и
type(i′′) = op.
Вариант 1. Выполняется начальная операция над ненулевым заказом, т.е.
i′′ → (i, k) и (1 ≤ i ≤ n0)&(k > 0). Если xi′′ = xpk(i′′), то операция i при выпол-
нении k-го и (k - 1)-го заказов использует один ресурс.
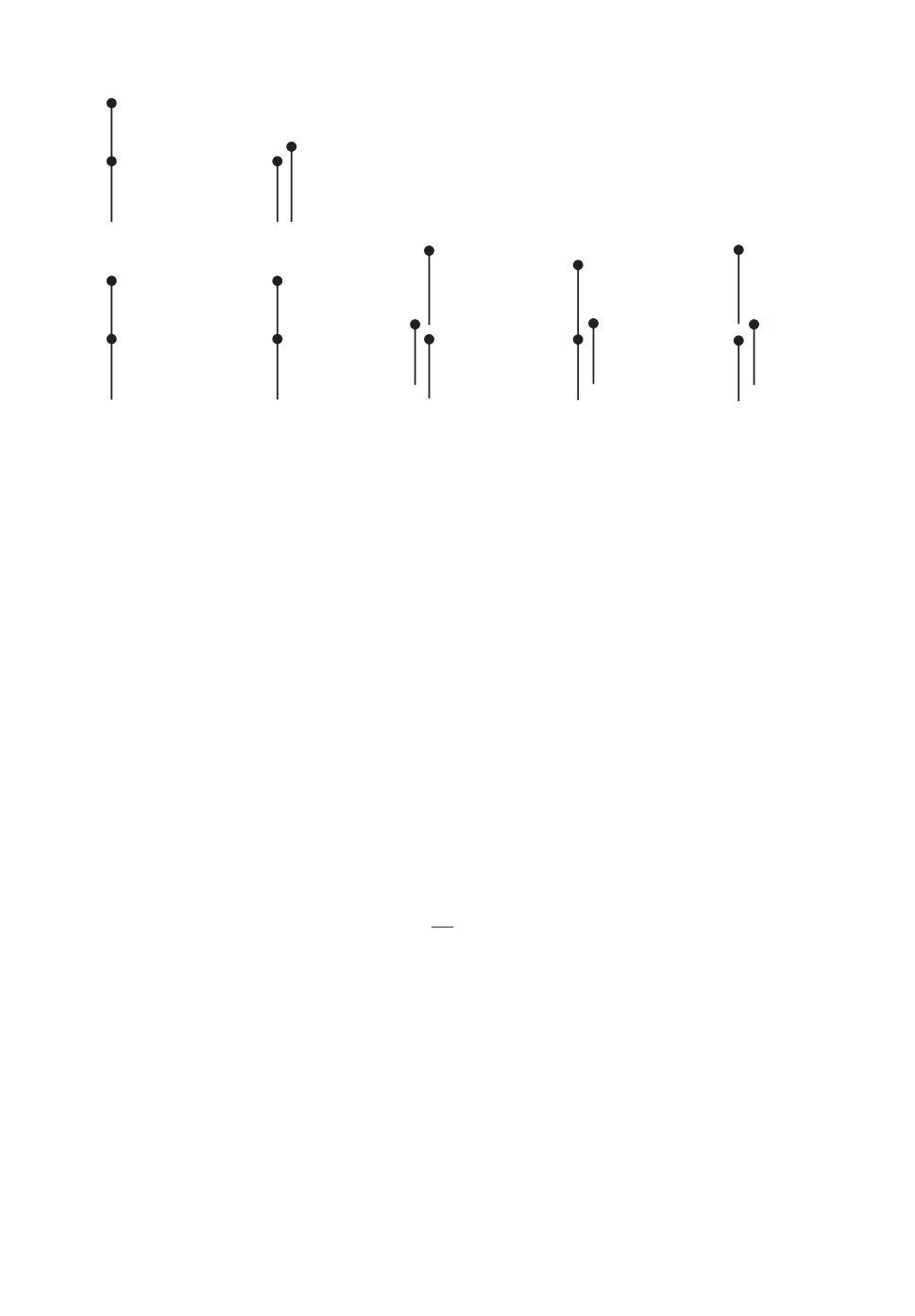
В этом случае время завершения вычисляется по формуле (2,a) (диаграм-
ма на рис. 10,а). Если же используются разные ресурсы, то выполнение опе-
рации i можно осуществить одновременно над заказами (k - 1) и k. Завер-
шение выполнения вычисляется по формуле (2,б) (диаграмма на рис. 10,б ).
Длительности операций могут не совпадать. Учитывая, что время выполне-
90
а
б
в
г
д
i ''
(i, k)
i ''
(i, k
1)
pk(i '')
i ''
i ''
i ''
(i, 1)
(i, 1)
pi(i '')
pk(i '')
pk(i '')
(i, 0)
(i, 0)
pk(i '')
pi(i '')
pi(i '')
Рис. 10. Варианты фрагментов временных диаграмм.
ния операцией i (k - 1)-го заказа оптимально, время выполнения i k-го заказа
также оптимально. Вариант рассмотрен.
Вариант 2. В этом случае выполняется неначальная операция. Если k =
= 0, то время завершения вычисляется по формуле (3,a). Если k > 0, то время
завершения вычисляется по вариантам (3,б)-(3,г). Соответствующие приме-
ры временных диаграмм приведены на рис. 10,c-e. Во всех вариантах новое
расписание с добавлением вершины i′′ будет оптимальным, если предшест-
вующее расписание было оптимальным.
Варианты 3-8. Во всех данных вариантах вершины соответствуют спус-
ковым функциям. В этом случае не производится распределение ресурсов
и итоговое расписание строится единственным возможным способом исходя
из отношения временного предшествования, определяемого соответствующей
рекурсивной функцией.
Утверждение доказано.
Временная сложность алгоритма равна
)
( (
∏
T0
O log2
|Di |
,
Δ
i=1
где T0 - значение времени выполнения расписания для некоторого произ-
вольного множества значений V0, Δ - некоторая наперед заданная константа
точности вычисления результата, а | Di |= 1 для спусковых функций.
5. Заключение
В данной статье осуществлена теоретическая постановка задачи. Впервые
для исследования конвейерной модели используется такой инструмент, как
Constraint Programming. Применение данного метода на практике является
дальнейшим направлением работы авторов статьи.
91
В настоящее время существует большое количество коммерческих и сво-
бодного использования систем программирования в ограничениях. Обзор та-
ких систем можно посмотреть в [2].
Изучение вычислительной сложности решения ЗУО представляется фун-
даментальной проблемой. В [18] было показано, что класс всех ЗУО является
NP-трудным, так что вряд ли существуют эффективные (полиномиальные)
алгоритмы общего назначения для решения всех видов ЗУО. Классы легко
разрешимых ЗУО, которые могут быть решены за полиномиальное время,
обычно описываются или деревьями и древовидными графовыми структура-
ми [19, 20], или определенной комбинацией алгебраических операторов [21].
Рассматриваемая в статье задача базируется на дереве ограничений (исход-
ный ациклический граф и расщиренный граф), что внушает оптимизм по по-
воду существования эффективного алгоритма решения поставленной задачи.
Построение расписания для конвейера вычислением суперпозиции рекурсив-
ных функций предполагает для решения ЗУО вариант поиска с возвратами
(backtracking) в различных модификациях [2]. Важно отметить, что введение
в модель конвейера спусковых функций нисколько не увеличивает алгорит-
мическую сложность решения задачи.
Использование данного метода дает два важных преимущества.
Первое. Метод оптимизации рекурсивного конвейера, рассмотренный в
статье [22], сводится к задаче целочисленного линейного программирования и
рассматривает строго определенный набор рекурсивных функций. Введение
новых функций требует дополнительного рассмотрения корректности при-
менения метода. Подход, используемый в данной статье, хотя и рассматри-
вает конкретный набор функций, однако никаких ограничений, кроме вы-
числимости, к ним не предъявляет. Это позволяет вводить в рассмотрение
новые рекурсивные функции без обсуждения вопроса корректности приме-
нения метода.
Второе. Предложенный метод позволяет распределять ресурсы без их за-
крепления за отдельными операциями. Данный подход увеличивает размер-
ность задачи, но открывает возможности для построения более эффективного
расписания.
СПИСОК ЛИТЕРАТУРЫ
1. Лазарев А.А., Гафаров Е.Р. Теория расписаний. Задачи и алгоритмы. М.: Изд-
во МГУ, 2011.
2. Rekiek B., Dolgui A., Delchambre A., Bratcu A. State of art of optimization methods
for assembly line design // Annual Reviews in Control. 2002. V. 26. P. 163-174.
3. Ghosh S., Gagnon R.J. A comprehensive literature review and analysis of the design,
balancing and scheduling of assembly systems // Int. J. Product. Res. 1989. V. 26.
No. 4. P. 637-0670.
4. Helgeson W.B., Salveson M.E., Smith W.W. How to balance an assembly line /
Technical Report, Carr Press. 1954. New Caraan, Conn.
5. Bowman E.H. Assembly line balancing by linear programming // Oper. Res. 1960.
No. 8(3). P. 3850-389.
92
6.
Salveson M.E. The assembly line balancing problem // J. Indust. Engineer. 1955.
No. 6. P. 18-25.
7.
Neumann K., Schwindt C., Zimmermann J. Recent results on resource-constrained
project scheduling with time windows: Models, solution methods, and applications //
Central Eur. J. Oper. Res. 2002. V. 10. 2. P. 113-148.
8.
Drexl A., Kimms A. Optimization guided lower and upper bounds for the resource
investment problem // J. Oper. Res. Society. 2001. V. 52. No. 3. P. 340-351.
9.
Ranjbar M., Kianfar F., Shadrokh S. Solving the resource availability cost problem in
project scheduling by path relinking and genetic algorithm // Applied Mathematics
and Computation. 2008. V. 196. No. 2. P. 879-888.
10.
Yamashita D.S., Armentano V.A., Laguna M. Robust optimization models for
project scheduling with resource availability cost // Journal of Scheduling. 2007.
V. 10. No. 1. P. 67-76.
11.
Щербина О.А. Удовлетворение ограничений и программирование в ограничени-
ях// Интеллектуальные системы. 2011. Т. 15. № 1-4. С. 53-170.
12.
Apt K.R. Principles of Constraint Programming. New York: Cambridge University
Press, 2003.
13.
Нариньяни А.С., Седреева Г.О., Седреев С.В., Фролов С.А. TimeEX/Windows -
новое поколение недоопределенной технологии календарного планирования /
Проблемы представления и обработки не полностью определенных знаний. Под
ред. И.Е. Швецова. Москва; Новосибирск, 1996. С. 101-116.
14.
Куприянов Б.В. Рекурсивные конвейерные процессы - основные свойства и ха-
рактеристики // Экономика, статистика и информатика. Вестн. УМО. 2015. № 1.
С. 163-170.
15.
Куприянов Б.В. Применение модели конвейерных процессов рекурсивного ти-
па для решения прикладных задач // Экономика, статистика и информатика.
Вестник УМО. 2014. № 5. С. 170-179.
16.
Куприянов Б.В. Метод эффективного анализа модели рекурсивного конвейер-
ного процесса // АиТ. 2017. № 3. С. 63-79.
Kupriyanov B.V. Method of Efficient Analysis of the Recursive Conveyor Process
Models // Autom. Remote Control. 2017. V. 78. No. 3. P. 435-449.
17.
Оре О. Теория графов. М.: Наука, 1980.
18.
Mackworth A.K. Consistency in networks of relations // Artificial Intelligence. 1977.
V. 8. No. 1. P. 99-118.
19.
Dechter R., Pearl J. Tree clustering for constraint networks // Artificial Intelligence.
1989. V. 38. No. 3. P. 353-366.
20.
Freuder E.C. Backtrack-free and backtrack-bounded search / Search in Artificial
Intelligence / L. Kanal, V. Kumar (eds.). Springer-Verlag, 1988. P. 343-369.
21.
Jeavons P.G., Cohen D.A., Gyssens M. Closure properties of constraints // Journal
of ACM. 1997. V. 44. P. 527-548.
22.
Куприянов Б.В. Оценка и оптимизация производительности рекурсивного кон-
вейера // АиТ. 2020. № 5. С. 6-25.
Kupriyanov B.V. Estimation and Optimization of the Efficiency of a Recursive
Conveyor // Autom. Remote Control. 2020. V. 81. P. 775-790.
Статья представлена к публикации членом редколлегии А.А. Галяевым.
Поступила в редакцию 25.01.2021
После доработки 21.06.2021
Принята к публикации 30.06.2021
93