Автоматика и телемеханика, № 12, 2021
© 2021 г. М.М. ХРУСТАЛЕВ, д-р физ.-мат. наук (mmkhrustalev@mail.ru),
К.А. ЦАРЬКОВ, канд. физ.-мат. наук (k6472@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
НЕКОТОРЫЕ АЛГОРИТМЫ УЛУЧШЕНИЯ НЕСТАЦИОНАРНЫХ
РЕГУЛЯТОРОВ НА БЕСКОНЕЧНОМ ИНТЕРВАЛЕ ВРЕМЕНИ1
Исследуется задача оптимизации линейной по состоянию и нелиней-
ной по управлению динамической стохастической системы, функциони-
рующей на бесконечном интервале времени, относительно квадратичного
функционала качества. Предлагается несколько алгоритмов последова-
тельного улучшения заданного нестационарного программного управле-
ния. Они могут быть использованы, в частности, для построения каче-
ственных динамических регуляторов неполной обратной связи в детер-
минированных линейных стационарных системах. Для обоснования алго-
ритмов улучшения сформулирован и доказан ряд строгих утверждений
относительно исходной оптимизационной проблемы.
Ключевые слова: динамическая обратная связь, бесконечный интервал
времени, нелинейная стохастическая система, структурные ограничения.
DOI: 10.31857/S0005231021120059
1. Введение
Предположим, что исследуется задача управления линейной динамиче-
ской системой
(1)
x(t) = Ax(t) + Bu(t)
с заданными начальным условием x(0) = x0 ∈ Rn и матрицами системы
A ∈ Rn×n, B ∈ Rn×m, в которой качество управления оценивается значени-
ем функционала
+∞
(
)
(2)
J (u) =
x(t)TQx(t) + u(t)TEu(t)
dt
0
всюду, где он определен. Здесь Q ∈ Rn×n и E ∈ Rm×m - положительно опре-
деленные матрицы.
Будем считать, что функцию управления u(t) необходимо построить в виде
линейного регулятора
u(t) = P (t)x(t),
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (проект № 20-08-00400).
73
так что (1)-(2) преобразуются к виду
(3)
x(t) = (A + BP (t))x(t), x(0) = x0,
+∞
(4)
J (P ) = x(t)T(Q + P (t)T
EP(t))x(t)dt.
0
Пусть, для начала, на матричную функцию P (t) не наложено никаких
ограничений, кроме естественного требования сходимости несобственного ин-
теграла в правой части (4). Множество всех таких функций P (t) обозначим
через S. В этом случае задача J(P ) → minP∈S совпадает с классической
линейно-квадратичной задачей оптимального регулирования на бесконечном
временном интервале, ее решение хорошо известно из теории аналитического
конструирования оптимальных регуляторов (АКОР) и является постоянной
по времени матричной функцией P (t) ≡ P∗, одной и той же для любого x0.
Предположим теперь, что дополнительно требуется удовлетворить неко-
торый набор структурных ограничений на функцию P (t) (например, Pij (t) ≡
≡ 0 для каких-то i,j и т.п.). Оказывается, что в этом случае решение задачи
J (P ) → minP∈S на соответствующем множестве S может не быть постоянной
матрицей. Это обстоятельство несколько удивительно ввиду того, что все па-
раметры A, B, Q и E в задаче остаются стационарными, но стационарный
регулятор уже не является оптимальным среди всех возможных. Возникает
естественная потребность в алгоритме построения оптимального нестацио-
нарного регулятора в подобной задаче (или, по крайней мере, в алгоритме
улучшения имеющегося оптимального регулятора среди всех стационарных),
чему и посвящена данная работа. Соответствующие результаты формули-
руются для существенно более общей стохастической задачи оптимального
управления, а затем обсуждаются, в том числе и для указанной выше ситуа-
ции, на примерах.
В контексте изучаемой проблемы и предлагаемых ниже путей ее реше-
ния нелишним будет указать ссылку на монографию [1], где в числе прочего
обсуждается вопрос минимизации функционала (4) с условием (3) на мно-
жестве постоянных стабилизирующих матриц P (t) ≡ P∗, удовлетворяющих
заданным структурным ограничениям. В частности, для задачи линейного
регулирования по выходу выписан градиент функционала J на указанном
множестве [1, с. 253]. Там же отмечается, что использование затем гради-
ентной процедуры минимизации не гарантирует отыскание решения (ввиду
невыпуклости как самого функционала, так и его области определения) и по-
тому такую задачу следует отнести к разряду нерешенных проблем. То же
самое, безусловно, можно сказать и об изучаемой в настоящей работе более
общей задаче, однако в качестве ее «решения» здесь тем не менее предла-
гается улучшающая процедура градиентного типа. Это связано с тем, что
для задач нестационарного регулирования в условиях структурных ограни-
чений глобальный минимум значений J может, вообще говоря, не достигаться
(см. [2], где построен простой пример расходящейся минимизирующей после-
довательности в линейно-квадратичной задаче на конечном временном ин-
74
тервале). Последнее означает, что даже наличие каких бы то ни было необхо-
димых и достаточных условий оптимальности данного нестационарного регу-
лятора также не гарантирует окончательного решения задачи, в то время как
градиентная процедура одинаково успешно (или неуспешно) может отыскать
и минимизирующую последовательность, и некоторое приближение к стацио-
нарной точке.
2. Формальная постановка задачи и предварительные результаты
Рассмотрим стохастическое дифференциальное уравнение Ито [3]
(5)
dx(t) = A(u(t))x(t)dt + G(u(t))x(t)dw(t), x(0) = x0,
где x0 — n-мерный случайный вектор с известной конечной матрицей вторых
начальных моментов E[x0xT0] = N0 ≽ 0, матричные функции A, G : Rm →
→ Rn×n непрерывно дифференцируемы на всей области определения. Для
заданных отображений A и G определено открытое множество S (стабили-
зирующих) векторов v ∈ Rm таких, что вещественные части всех собствен-
ных значений матрицы A(v) ⊕ A(v) + G(v) ⊗ G(v) строго меньше нуля (сим-
волы ⊕ и ⊗ означают сумму и произведение Кронекера). Последнее условие
гарантирует асимптотическую устойчивость (стабилизируемость) динамиче-
ской системы (5) при u(t) ≡ v ∈ Rm в среднем квадратичном (это вытекает
из векторного представления матричного уравнения для второго начально-
го момента случайного процесса x(t) [4]). Если G = 0, то оно эквивалентно
классическому условию гурвицевости матрицы A(v).
Будем исследовать задачу на минимум
⎡
⎤
∫
(6)
J (u) = E⎣ x(t)TQ(u(t))x(t)dt⎦ → inf ,
u∈U
0
где для удобства записи опущена неявная зависимость в смысле уравне-
ния (5) вектора состояния x от функции управления u, матричная функция
Q : Rm → Rn×n непрерывно дифференцируема, Q(u) ≽ 0 ∀u ∈ Rm,
⋃
U = UT,
T≥0
а UT - множество измеримых на [0;+∞) функций u таких, что выполнены
условия:
1) u|[0;T] ∈ Lm2([0; T ]), если T > 0;
2) u(t) = uT ∈ S для всех t ≥ T .
Ясно, что UT можно рассматривать как открытое множество в
Lm2([0;T]) × Rm при T > 0 и как открытое множество в Rm при T = 0.
Предполагается, что функционал J на множестве U определен корректно, то
75
есть при любом u ∈ U существует единственное сильное решение [3] уравне-
ния (5), а несобственный интеграл в правой части (6) сходится к случайной
величине с конечным вторым моментом.
Отметим, что постановку задачи (5)-(6) и нижеследующие результаты
можно элементарно обобщить на случай многомерного случайного возмуще-
ния, но здесь для удобства изложения ограничимся одномерным стандартным
винеровским процессом w(t). Если же положить G(u) ≡ 0, A(u) = Ac + BcPu,
Q(u) = Qc + PTuEcPu, x0 = E[x0], то получается детерминированная зада-
ча (3)-(4) оптимизации линейного регулятора со структурными ограничения-
ми (здесь Pu - матрица регулятора, а вектор u составляется из максимального
набора линейно независимых компонент матрицы Pu).
Рассмотрим также три вспомогательные задачи: при фиксированном зна-
чении T > 0
⎡
⎤
∫
(7)
J∗(u) = E⎣ x(t)TQ(u(t))x(t)dt⎦ → inf ;
u∈UT
0
на конечном интервале времени
⎡
⎤
T
∫
(8)
Jα(u) = E⎣
x(t)TQ(u(t))x(t)dt + x(T )TαIx(T )⎦ →
inf
,
T > 0,
([0;T ])
u∈Lm2
0
где α ≥ 0 - скалярный коэффициент, а I - единичная матрица размеров n × n;
и на множестве допустимых управлений в виде постоянных векторов
⎡
⎤
∫
(9)
Jc(u) = E⎣ x(t)TQ(u)x(t)dt⎦ → min.
u∈S
0
Задачи (8) и (9) ранее исследовались в [5, 6]. Воспользуемся некоторыми ре-
зультатами из этих работ для построения различных алгоритмов улучше-
ния в задаче (6). Начнем с формулировки необходимых утверждений каса-
тельно задач (7)-(9). Здесь и далее под градиентом ∇F (v0) функционала
F : Lm2 ([0;T]) → R в точке v0 ∈ Lm2 ([0;T]) понимается, как обычно, элемент f
пространства Lm2[(0; T )] такой, что 〈f, v〉 = F′(v0)v ∀v ∈ Lm2([0; T ]), где 〈·, ·〉
означает скалярное произведение в Lm2([0; T ]), а F′(v0) : Lm2([0; T ]) → R - ли-
нейный функционал производной Фреше отображения F в точке v0. Кратко
будем писать ∇F (v0) = t → f(t).
Утверждение 1. Компоненты градиента функционала Jα в произволь-
ной точке u ∈ Lm2([0; T ]) имеют вид
)
]
∂Jα(u)
[(∂Q(u(t))
∂A(u(t))
∂G(u(t))
= t→tr
- 2M(t)
- 2G(u(t))TM(t)
N (t) ,
∂uj(·)
∂uj
∂uj
∂uj
j = 1,m, где матричная функция N : [0;T] → Rn×n является единственным
решением задачи Коши
N (t) = A(u(t))N(t) + N(t)A(u(t))T + G(u(t))N(t)G(u(t))T , N(0) = N0,
76
а матричная функция M : [0;T] → Rn×n — единственным решением задачи
Коши
M (t) = -M(t)A(u(t)) - A(u(t))TM(t) - G(u(t))TM(t)G(u(t)) + Q(u(t)),
M (T ) = -αI,
причем
Jα(u) = -tr [M(0)N0].
Утверждение 2. Компоненты градиента функционала Jc в произволь-
ной точке u ∈ S имеют вид
)
]
∂Jc(u)
[(∂Q(u)
∂A(u)
∂G(u)
= tr
- 2MT
- 2G(u)TMT
NT
,
j = 1,m,
∂uj
∂uj
∂uj
∂uj
где матрица NT ∈ Rn×n является единственным решением уравнения
A(u)NT + NT A(u)T + G(u)NT G(u)T + N0 = 0,
а матрица MT ∈ Rn×n — единственным решением уравнения
Q(u) - MT A(u) - A(u)TMT - G(u)TMT G(u) = 0,
причем
Jc(u) = -tr [MT N0].
Утверждение 3. Градиент функционала J∗ в произвольной точке
u ∈ UT имеет вид
⎛
⎞
∂J∗(u)
⎜
∂u(·)
⎟
⎜
⎟
∇uJ∗(u) =
Lm2([0;T]) × Rm,
⎠∈
⎝ ∂J∗(u)
∂uT
)
]
∂J∗(u)
[(∂Q(u(t))
∂A(u(t))
∂G(u(t))
= t→tr
- 2M(t)
- 2G(u(t))TM(t)
N (t) ,
∂uj(·)
∂uj
∂uj
∂uj
)
]
∂J∗(u)
[(∂Q(uT )
∂A(uT )
∂G(uT )
= tr
- 2MT
- 2G(uT )TMT
NT , j = 1,m,
∂uTj
∂uj
∂uj
∂uj
где матричная функция N : [0; T ] → Rn×n и матрица NT ∈ Rn×N являются
единственным решением системы уравнений
N (t) = A(u(t))N(t) + N(t)A(u(t))T + G(u(t))N(t)G(u(t))T , N(0) = N0,
A(uT )NT + NT A(uT )T + G(uT )NT G(uT )T + N(T ) = 0,
77
а матричная функция M : [0;T] → Rn×n и матрица MT ∈ Rn×n - единствен-
ным решением системы уравнений
M (t) = -M(t)A(u(t)) - A(u(t))TM(t) - G(u(t))TM(t)G(u(t)) + Q(u(t)),
M (T ) = MT ,
Q(uT ) - MT A(uT ) - A(uT )TMT - G(uT )TMT G(uT ) = 0,
причем
J∗(u) = -tr [M(0)N0].
Утверждение 1 для задачи (8) было впервые сформулировано и доказано
в [5], а утверждение 2 для задачи (9) - в [6]. Утверждение 3 для задачи (7)
формулируется впервые и комбинацией утверждений 1-2 не выводится. В це-
лях соблюсти целостность текста статьи, а также подчеркнуть единый подход
к задачам, полное доказательство всех этих утверждений приведено в Прило-
жении. Альтернативные формулы для вычисления значений функционалов в
каждом из сформулированных утверждений могут быть эффективно исполь-
зованы для контроля значений этих функционалов в процессе применения
улучшающих процедур. Это подразумевается в дальнейшем при формулиров-
ке алгоритмов. Важно отметить, что значение функционала Jα в отличие от
значений Jc и J∗ никак в общем случае не соотносится со значением исходного
функционала J, так как речь идет о модифицированном функционале (8).
3. Алгоритмы улучшения нестационарных регуляторов
В [7] был предложен достаточно простой алгоритм улучшения имеющего-
ся оптимального стационарного регулятора в задаче (9) за счет построения
кусочно-постоянного управления, где при переходе к новому интервалу по-
стоянства фиксируется текущее начальное условие и строится оптимальный
для него стационарный регулятор на бесконечном времени. Уже такой подход
в ряде случаев позволяет серьезно повысить качество управления. Проблема
развития идей улучшения на «полностью нестационарный» случай состоит
в том, что для нестационарного регулятора в подавляющем большинстве си-
туаций невозможно аналитически определить оптимальное решение, а уда-
ется лишь построить улучшающую последовательность, быть может являю-
щуюся (а быть может, и нет [2]) некоторым приближением к одной из множе-
ства стационарных точек. Исследование примеров также позволяет устано-
вить существенную неединственность таких улучшающих последовательно-
стей, поэтому получение конкретного результата сильно зависит как от выбо-
ра начального приближения, так и от изменения величины шага улучшающей
процедуры. Наконец, в изучаемой здесь оптимизационной проблеме (6) речь
уже идет о совокупности задач, каждая из которых обладает указанными
особенностями. Как итог, предлагаемые ниже алгоритмы улучшения не мо-
гут гарантировать отыскание близкого к оптимальному нестационарного ре-
гулятора и потому являются скорее полезным инструментом исследования
78
проблемы, нежели сколь-нибудь полного ее решения. Тем не менее они могут
быть эффективно применены в конкретных прикладных задачах, где поря-
док улучшения значительно важнее близости к неизвестному оптимальному
решению.
Итак, пусть имеется какой-либо регулятор u ∈ UT при некотором T ≥ 0.
В частности, при T = 0 имеется стационарный регулятор. Будем считать его
начальным приближением и рассмотрим возможные варианты его улучшения
в смысле функционала качества (6).
Алгоритм 1. А) Случай T > 0. Построить улучшающую последователь-
ность в задаче (7), не изменяя T . Для этого осуществить градиентный спуск
исходя из формулы для ∇uJ∗(u) в утверждении 3. На каждом шаге при этом
необходимо проверять принадлежность нового приближения множеству UT , в
частности, должно быть выполнено включение uT ∈ S (проверяется по опре-
делению). Завершить расчеты при выполнении условия достаточной малости
совокупного градиента ∇uJ∗(u) по какой-либо норме.
Б) Случай T = 0. Построить улучшающую последовательность в зада-
че (9). Для этого осуществить градиентный спуск исходя из формулы для
∇uJc(u) в утверждении 2. На каждом шаге проверять принадлежность ново-
го приближения множеству S. Завершить расчеты при выполнении условия
достаточной малости градиента ∇uJc(u) по какой-либо норме.
Особенность алгоритма 1 состоит в том, что улучшающая последователь-
ность относительно проблемы (6) будет построена только в заданном классе
управлений UT . Если задан стационарный регулятор, то он останется стацио-
нарным.
Алгоритм 2. Построить улучшающие последовательности в задаче (7)
с увеличением значения T относительно данного вплоть до некоторого Tmax.
Для этого осуществлять градиентный спуск исходя из формулы для ∇uJ∗(u)
в утверждении 3. На каждом шаге проверять принадлежность нового при-
ближения множеству UT . При каждом T завершать расчеты при выполне-
нии условия достаточной малости совокупного градиента ∇uJ∗(u) по какой-
либо норме. При достижении стационарности получающегося решения u(t)
на некотором интервале заданной длины [T∗ - ε; T∗] проверить условие
u(T∗) ∈ S и в случае его выполнения закончить расчеты в целом, положив
u(t) = u(T∗), t > T∗; иначе произвольно выбрать u∗ ∈ S и положить u(t) = u∗,
t>T∗.
Алгоритм 2 предполагает многократный градиентный спуск на растущем
конечном интервале времени и все так же требует проверки условий uT ∈ S
и нахождения стабилизирующего регулятора при T = T∗. Вместе с тем по-
иск осуществляется в том числе и за пределами заданного исходного мно-
жества UT , однако и здесь могут быть потеряны некоторые потенциально
качественные в смысле функционала (6) решения. Оказывается, существует
способ существенно уменьшить вычислительную сложность алгоритма 2 и
одновременно несколько изменить область поиска решений задачи (6) путем
перехода к исследованию задачи (8).
79
Алгоритм 3. Задать некоторым образом весовой коэффициент α ≥ 0 и
построить улучшающие последовательности в задаче (8), варьируя значе-
ния T в некотором диапазоне (0; Tmax]. Для этого осуществлять градиент-
ный спуск исходя из формулы для компонент градиента в утверждении 1.
В качестве начального приближения брать u|[0; T]. При каждом T завершать
расчеты при выполнении условия достаточной малости градиента ∇uJα(u)
по какой-либо норме. При достижении стационарности получающегося ре-
шения u(t) на некотором интервале заданной длины [T∗ - ε; T∗] проверить
условие u(T∗) ∈ S и в случае его выполнения закончить расчеты в целом,
положив u(t) = u(T∗), t > T∗; иначе произвольно выбрать u∗ ∈ S и положить
u(t) = u∗, t > T∗. В случае отсутствия стационарности использовать значение
T∗ = Tmax. Проверить улучшение начального приближения в смысле функ-
ционала качества J∗ и в случае отсутствия улучшений считать применение
алгоритма безуспешным.
За счет задания достаточно большого значения α можно добиться отыска-
ния алгоритмом 3 таких решений, которые соответствуют «быстрому обнуле-
нию» ковариационной матрицы случайного процесса x(t), после чего любой
стабилизирующий регулятор достаточно быстро «гасит» оставшийся «хвост».
Более того, подходящий регулятор может быть найден автоматически. Есте-
ственно ожидать от таких решений высокого качества в смысле (6). Однако
особенности рассматриваемой задачи не предполагают, что такое решение
будет найдено именно в момент остановки алгоритма 3. Последний, учиты-
вающий это обстоятельство алгоритм имеет следующий вид.
Алгоритм 4. Задать некоторым образом весовой коэффициент α ≥ 0 и
построить улучшающие последовательности в задаче (8), варьируя значе-
ния T в некотором диапазоне (0; Tmax]. Для этого осуществлять градиент-
ный спуск исходя из формулы для компонент градиента в утверждении 1.
В качестве начального приближения также брать u|[0;T]. При каждом T за-
вершать расчеты при выполнении условия достаточной малости градиента
∇uJα(u), по какой-либо норме. При достижении стационарности получающе-
гося решения u(t) на некотором интервале заданной длины [T∗ - ε; T∗] (или
при T∗ = Tmax) сравнить между собой все найденные до этого решения и вы-
брать наилучшее из них (в смысле используемого здесь функционала Jα),
соответствующее какому-то
T. Проверить условие u
T) ∈ S и в случае его
выполнения закончить расчеты в целом, положив u(t) = u
T), t
T; иначе
произвольно выбрать u∗ ∈ S и положить u(t) = u∗, t
T. Проверить улучше-
ние начального приближения в смысле функционала J∗ и в случае отсутствия
улучшений считать применение алгоритма безуспешным.
Финальное условие остановки в алгоритмах 2-4 и произвольный выбор
u∗ ∈ S обусловлены тем, что для любого стабилизирующего (тем более оп-
тимального) вектора выполнено limt→+∞ N(t) = 0, из чего следует, что при
достаточно большом T∗ выбранное произвольно u∗ ∈ S, для которого было
бы положено u(t) = u∗, t > T∗, отличается достаточно мало по значению J∗ от
любого другого ũ ∈ S. Это, в свою очередь, означает малость компонент гра-
диента J∗ по uT относительно задачи (7). Отметим также, что формально все
80
алгоритмы являются только неухудшающими в том смысле, что не улучша-
ют стационарные точки соответствующих функционалов. Более того, струк-
тура алгоритмов 3 и 4 до последнего шага даже не может гарантировать, что
значение функционала качества J не ухудшится, и потому эти алгоритмы со-
держат дополнительную проверку найденного приближения по критерию J∗.
4. Примеры
Для начала рассмотрим детерминированный вариант модельного примера
из [4]:
{
x1(t) = 2x2(t), x1(0) = 1,
x2(t) = -x1(t) - u(t)x2(t), x2(0) = 1,
+∞
((
)
)
J =
u(t)2 + 1
x1(t)2 + x2(t)2
dt → min .
0
Воспользуемся утверждением 2, чтобы найти аналитическое решение за-
дачи в классе S стабилизирующих постоянных значений u ∈ R. Сперва опре-
делим множество S. Имеем
(
)
0
2
A=
,
−1 -u
откуда получаем собственные значения матрицы A
√
-u ±
u2 - 8
λ1,2 =
,
2
так что S = (0; +∞). Из утверждения 2 получаем следующие соотношения:
∂Jc(u)
= 2un11 + 2m12n12 + 2m22n22,
∂u
⎧
⎪
4n12 + 1 = 0,
⎪
⎪
2n22 - n11 - un12 + 1 = 0,
⎪
⎨
-2n12 - 2un22 + 1 = 0,
⎪
u2 + 1 + 2m12 = 0,
⎪
⎪
m22 - 2m11 + um12 = 0,
⎪
⎩
1 - 4m12 + 2um22 = 0.
Последовательно находим (с учетом 0 ∈ S)
1
3
3
u
n12 = -
,
n22 =
,
n11 =
+
+ 1,
4
4u
2u
4
u2 + 1
3
3
u3 + 3u
m12 = -
,
m22 = -u -
,
m11 = -
-
,
2
2u
4u
4
81
u(t)
1,2
0,8
0,4
0
2
4
6
8
10
t
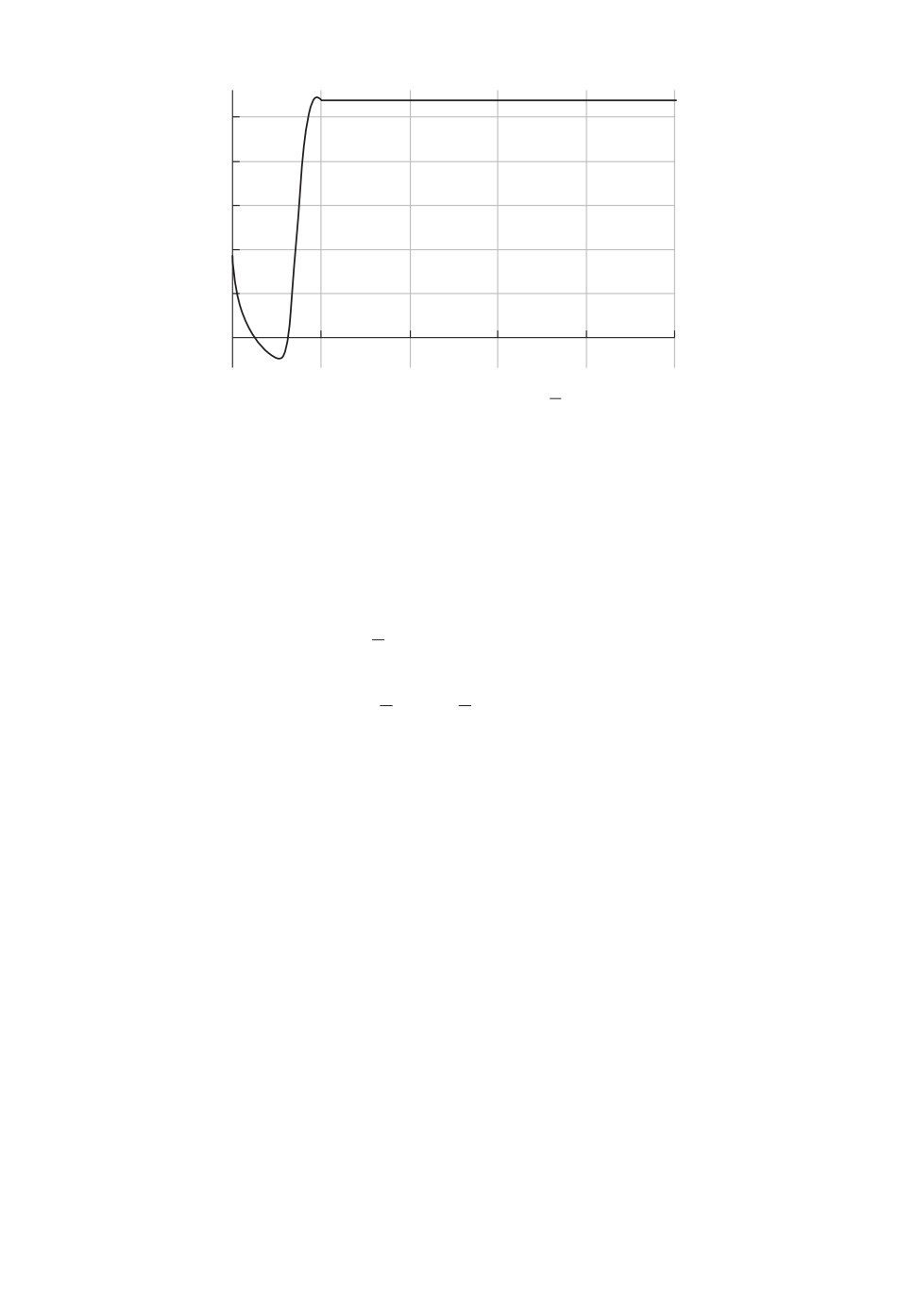
Рис. 1. Нестационарный регулятор ũ (алгоритм 2).
u(t)
1,2
0,8
0,4
0
2
4
6
8
10
t
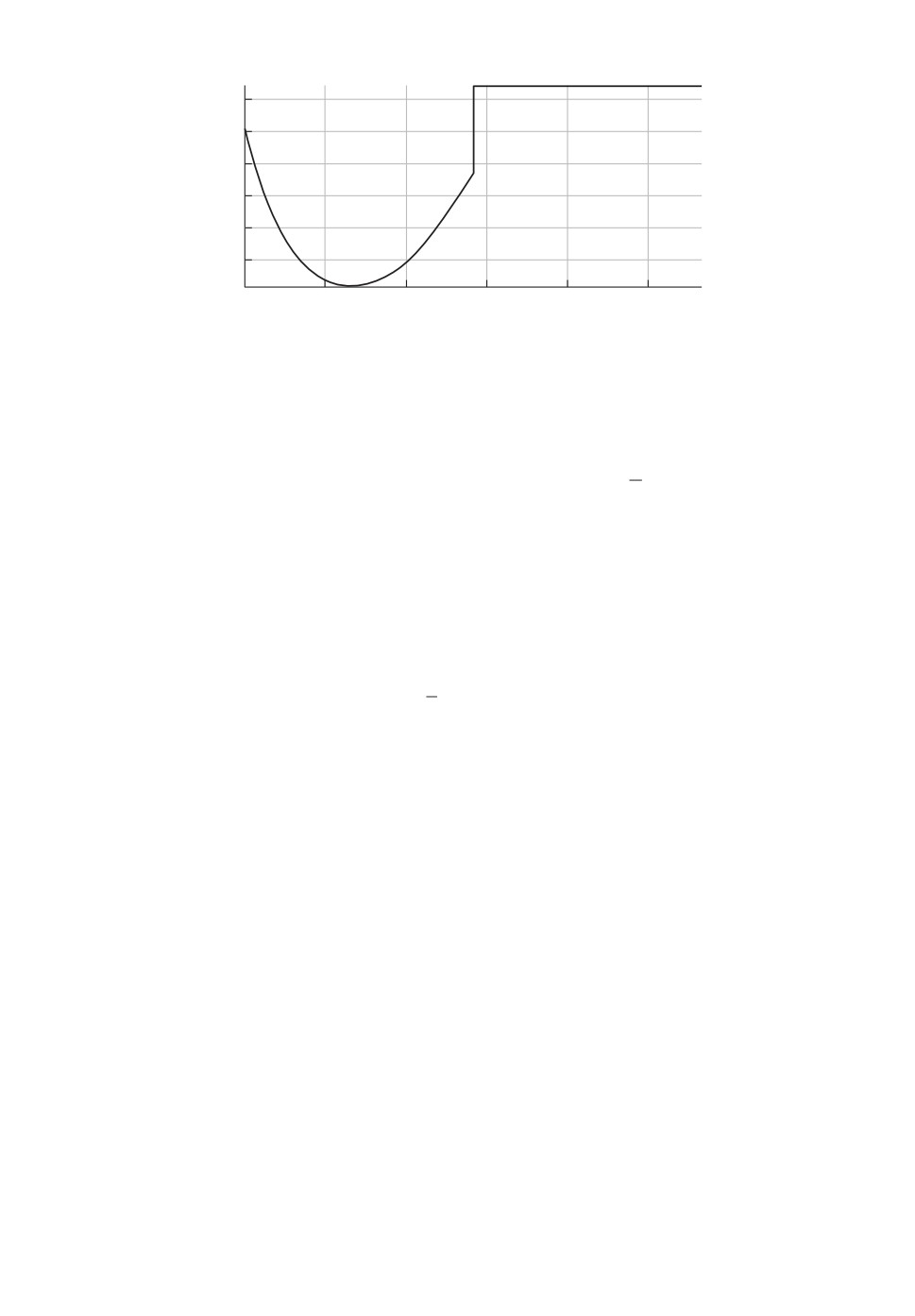
Рис. 2. Нестационарный регулятор û (алгоритм 3).
откуда
∂Jc(u)
3u4 + 8u3 + 7u2 - 9
=
∂u
4u2
В области S имеется единственное решение уравнения ∂Jc(u)/∂u = 0, а имен-
но, u∗ ≈ 0, 775.
Итак, решение задачи в классе стабилизирующих постоянных управлений
существует и определяется аналитически как единственный положительный
действительный корень уравнения 3u4 + 8u3 + 7u2 - 9 = 0. При помощи аль-
тернативной формулы для Jc(u) из утверждения 2 также можно заключить,
что значение функционала качества на этом решении равно
∗
9
(u∗)3 + 7u
Jc(u∗) = -m∗11 - 2m∗12 - m∗22 =
+
+ (u∗)2 + 1 ≈ 5,976.
4u∗
4
Теперь интересен следующий вопрос: «Возможно ли улучшить качество
найденного оптимального стационарного управления при помощи алгорит-
мов 1-4, и если да, то насколько сильно?»
Ясно, что алгоритм 1 не может улучшить найденное u∗, но с его помощью
можно приблизиться к u∗ сколь угодно точно, стартуя из произвольного ста-
билизирующего значения.
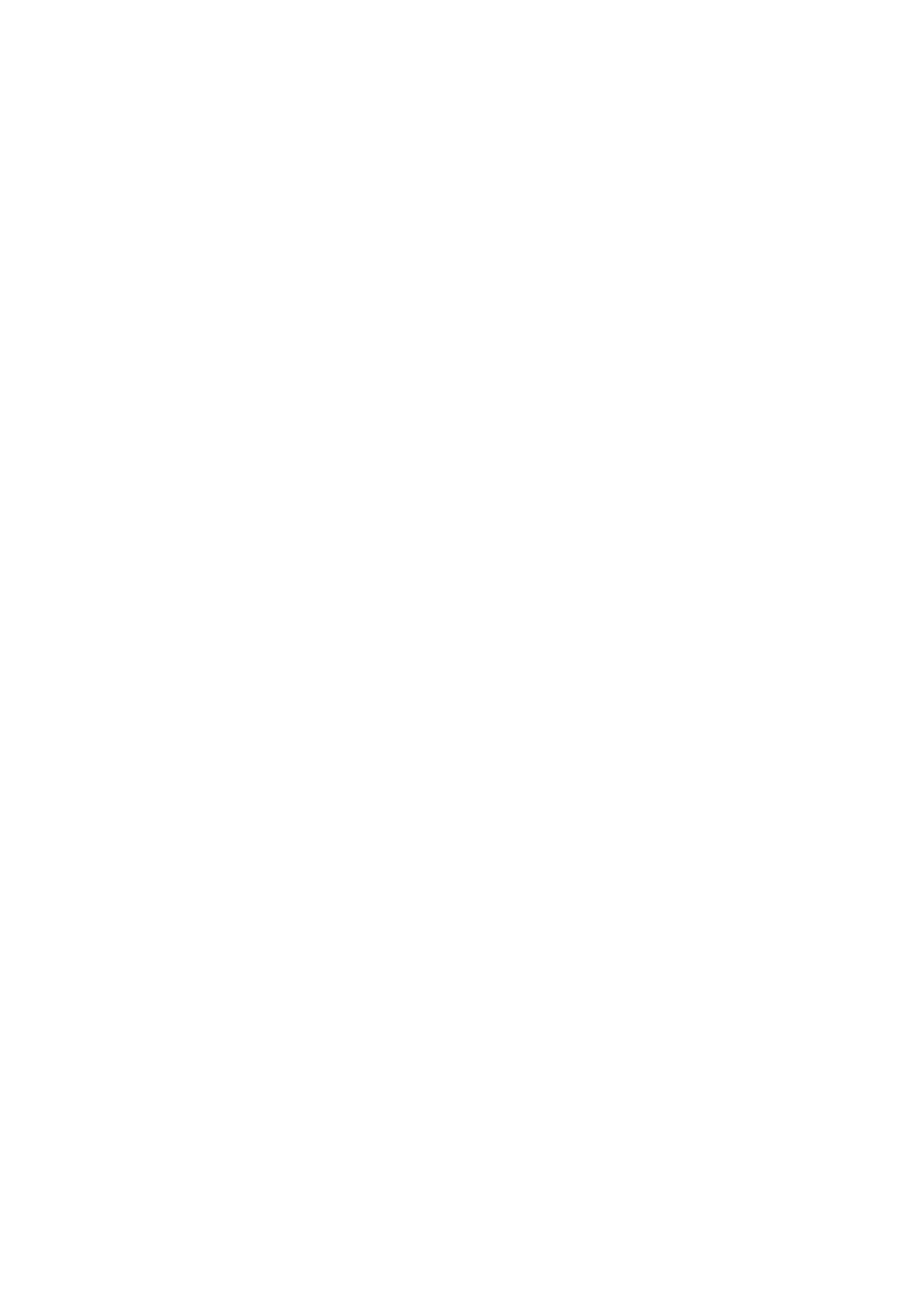
Реализуем численно алгоритм 2 (технические подробности относительно
используемой в работе реализации алгоритмов 1-4 приведены в следующем
разделе), взяв в качестве начального приближения u(t) ≡ u∗. В результате
окажется найдено приближение ũ, представленное на рис. 1. Значение функ-
ционала качества также вычисляется численно по альтернативной формуле
из утверждения 1:
J(ũ) = J∗(ũ) ≈ 4,385.
82
u(t)
5
4
3
2
1
0
2
4
6
8
1
0 t
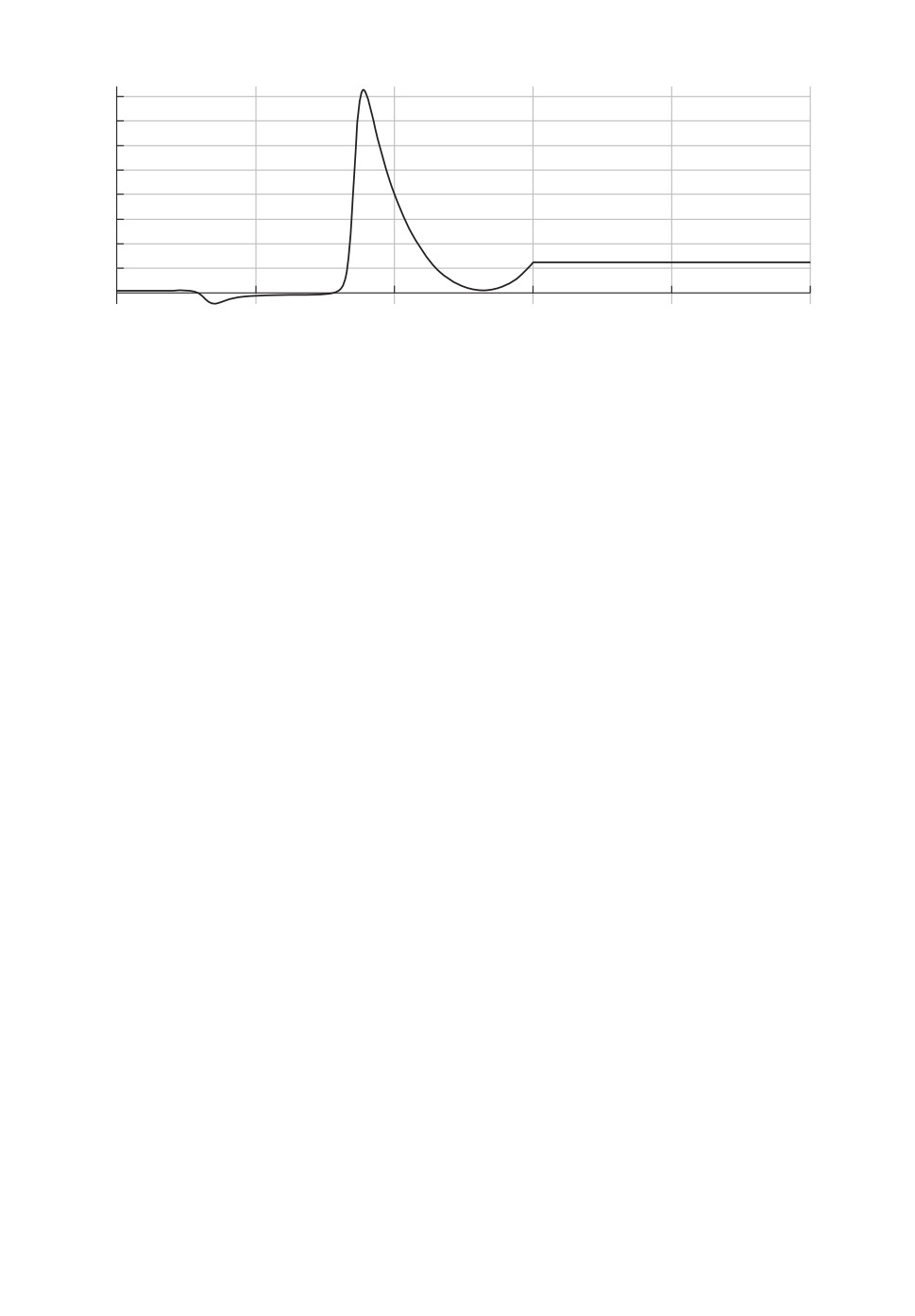
Рис. 3. Нестационарный регулятор u (алгоритм 4).
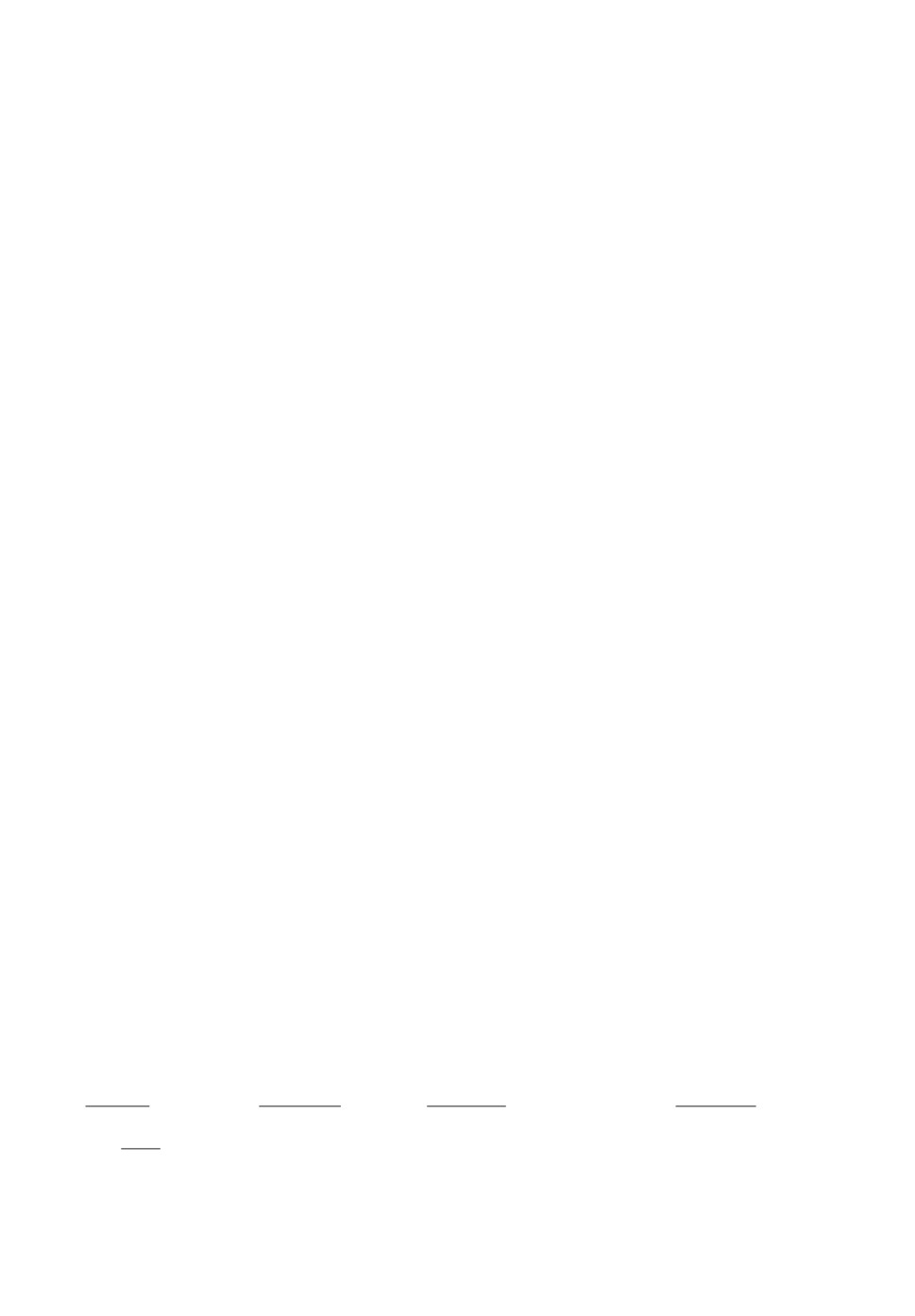
Используя то же начальное приближение u(t) ≡ u∗, применим алгоритм 3.
В результате окажется найдено û, отличающееся (хоть и незначительно) от ũ.
Приближение û представлено на рис. 2. Значение функционала качества на
нем
J(û) = J∗(û) ≈ 4,332.
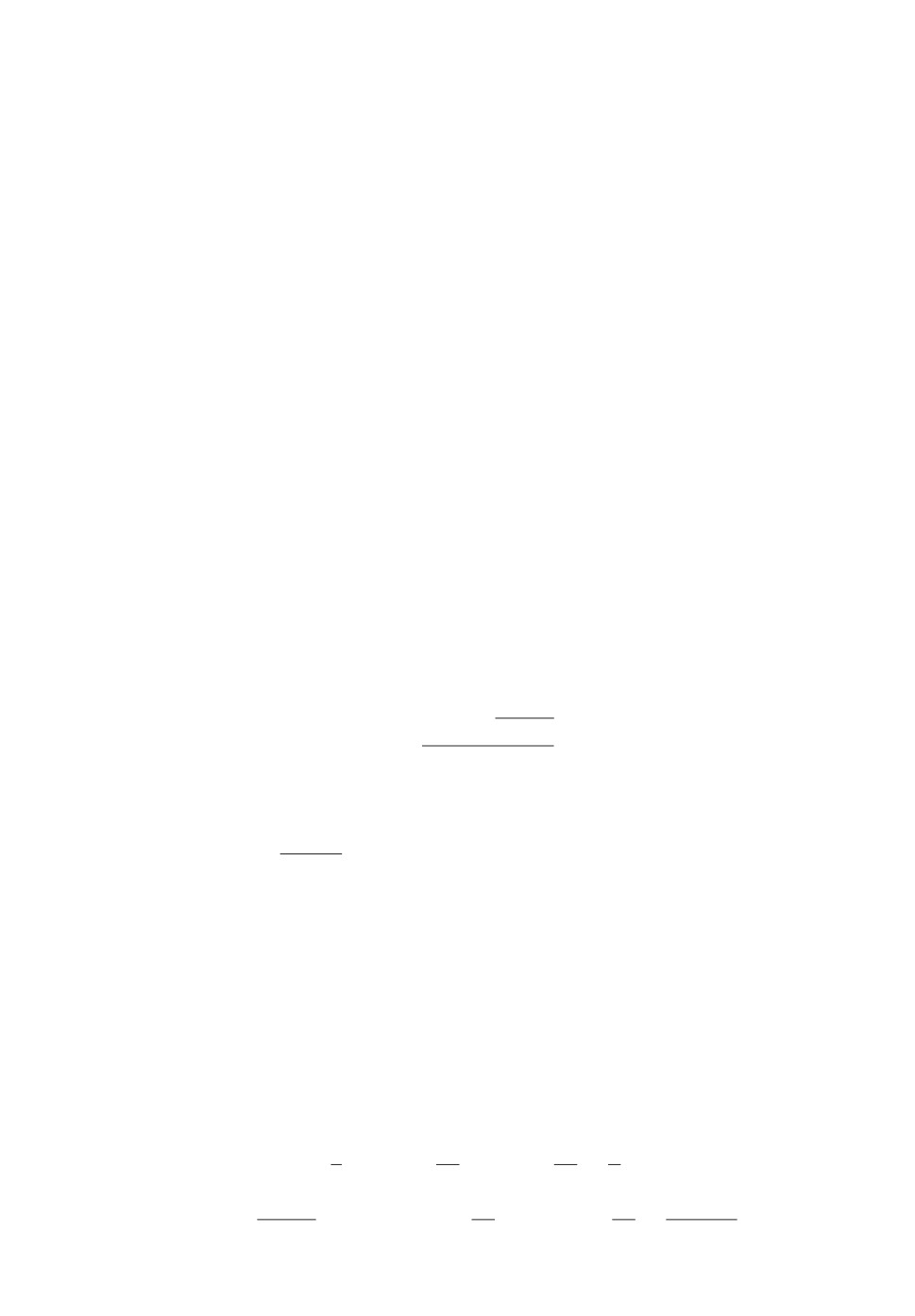
Наконец, алгоритм 4 позволяет получить из начального приближения
u(t) ≡ u∗ совершенно другое u (см. рис. 3). При этом значение функциона-
ла качества
J (u) = J∗(u) ≈ 3,572.
Как итог, получена возможность построить нестационарный регулятор,
почти вдвое превышающий по качеству оптимальное стационарное решение.
Ясно, что варьирование начального приближения и параметров алгоритмов
может привести к дальнейшему улучшению.
Этот результат можно интерпретировать следующим образом. В стацио-
нарной линейно-квадратичной задаче оптимального управления
x(t) = Ax(t) + Bu(t), x(0) = (1, 1)T,
(
)
(
)
0
2
0
A=
,
B=
,
−1 0
-1
+∞
(
)
J (u) =
x(t)TQx(t) + u(t)Eu(t)
dt → min,
0
(
)
1
0
Q=
,
E=1
0
1
наилучший стационарный линейный регулятор вида
u(t) = u∗x2(t)
83
u(t)
1,2
1,0
0,8
0,6
0,4
0,2
0
0,5
1,0
1,5
2,0
2,5
t
Рис. 4. Нестационарный регулятор û (алгоритм 1; стохастический случай).
не является оптимальным среди всех регуляторов, линейных по второй коор-
динате вектора состояния; в частности, регуляторы
u(t) = ũ(t)x2(t), u(t) = û(t)x2(t), u(t) = u(t)x2(t)
обеспечивают лучшее качество управления в смысле заданного функциона-
ла J.
Сопоставим теперь результаты настоящей работы с исследованиями ста-
тьи [4]. В [4] обсуждается стохастический вариант предыдущего примера, а
именно
⎧
1
⎨
dx1(t) = 2x2(t)dt +
u(t)x1(t)dw(t), x1(0) = 1,
2
⎩
dx2(t) = -(x1(t) + u(t)x2(t))dt, x2(0) = 1,
⎡
⎤
∫
((
)
)
J =E⎣
u(t)2 + 1
x1(t)2 + x2(t)2
dt⎦ → min .
0
Там же найдено оптимальное решение в классе стабилизирующих постоян-
ных управлений. Аналогично предыдущему можно показать, что это решение
является единственным в области устойчивости S действительным корнем u∗
уравнения 6-й степени ∂Jc(u)/∂u = 0 и u∗ ≈ 0,678, Jc(u∗) ≈ 6,777. В [4] также
предлагается улучшающий алгоритм построения кусочно-постоянного управ-
ления, с помощью которого найдено новое приближение
{ 0,678, 0 ≤ t < 1,42,
ũ(t) =
J(ũ) ≈ 6,185.
1,239,
1,42 ≤ t < +∞,
Ясно, что ũ ∈ UT при T = 1,42, поэтому можно использовать для его улуч-
шения алгоритм 1. Результат û представлен на рис. 4,
J(û) = J∗(û) ≈ 5,165.
84
u(t)
8
7
6
5
4
3
2
1
0
1
2
3
4
5
t
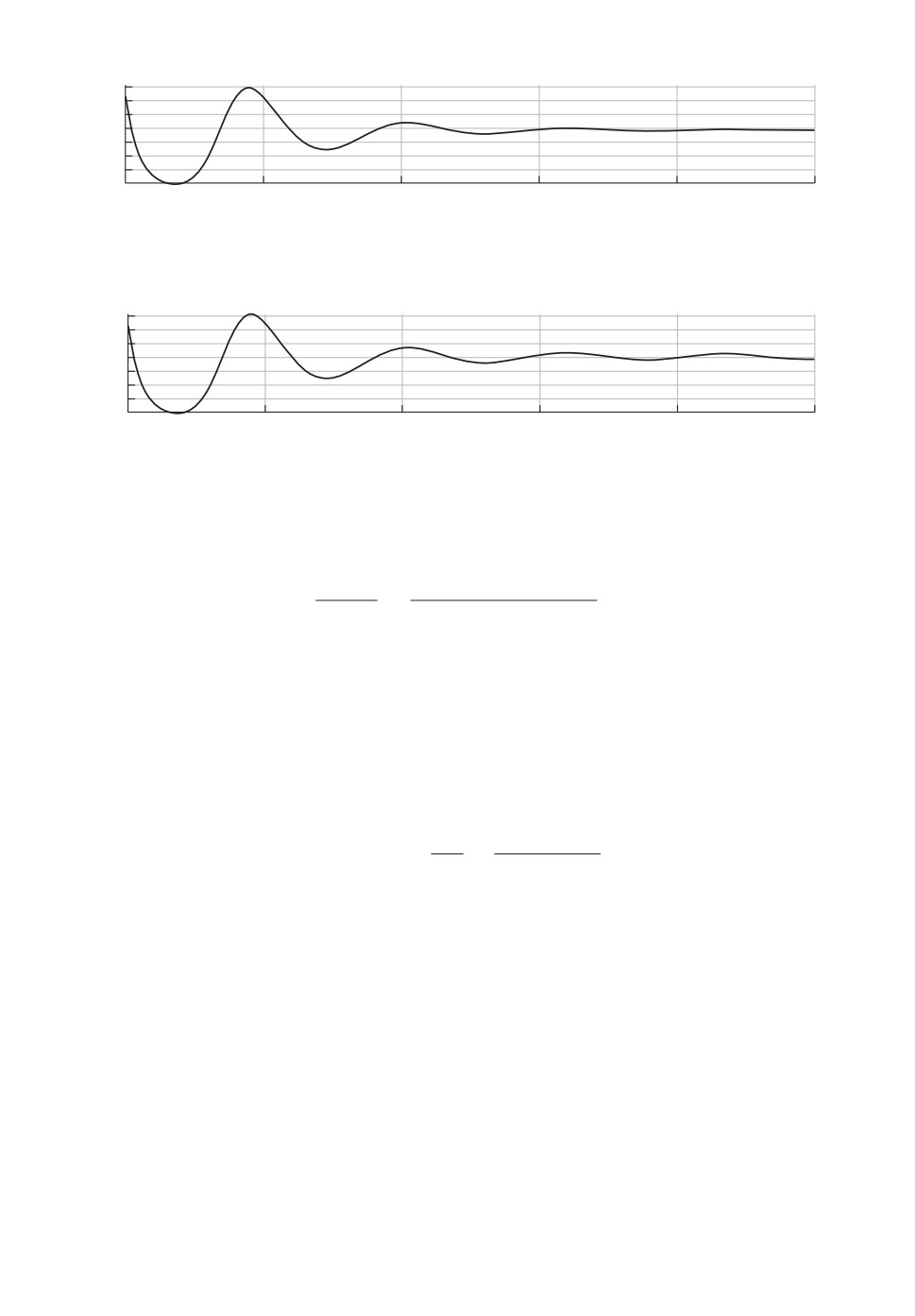
Рис. 5. Нестационарный регулятор (алгоритм 4; стохастический случай).
Алгоритмы 2-4 позволяют в дальнейшем улучшить качество управления
до значений функционала
J2 ≈ 4,734, J3 ≈ 4,639, J4 ≈ 3,562.
Приближения, построенные по алгоритмам 2 и 3, практически не отличаются
от представленных на рис. 1 и 2. Приближение по алгоритму 4 приведено на
рис. 5.
5. Комментарии по реализации алгоритмов улучшения
Все алгоритмы реализованы в СКМ Maple в виде двух блоков программ
(блок 1 - алгоритмы 1 и 2; блок 2 - алгоритмы 3 и 4). Численное решение за-
дач Коши для линейных матричных дифференциальных уравнений в утвер-
ждениях 1 и 3 реализовано простейшим методом Эйлера с шагом h = 0,001,
численное решение алгебраических уравнений в утверждениях 2 и 3 - встро-
енным решателем solve. При реализации градиентного спуска использованы
динамически изменяющиеся величины шагов раздельно для «функциональ-
ной» и «хвостовой» части градиента. Значения параметров выбраны равными
Tmax = 10, α = 100. Изменение параметра T в алгоритмах 3 и 4 осуществля-
ется на множестве {0, 1, . . . , Tmax}. В соответствии с шагом численного инте-
грирования функциональная составляющая градиента считается принадле-
жащей пространству RN , N = T/h, а норма совокупного градиента вычис-
ляется по формуле ||x||∞ = max0≤i≤N+1 |xi|. Условие остановки градиентного
спуска: норма совокупного градиента не превышает значение ε = 1.
ПРИЛОЖЕНИЕ
Справедливость всех сформулированных в работе утверждений непосред-
ственно вытекает из следующего общего результата.
Лемма 1. Пусть заданы банахово пространство X, открытое мно-
жество O в гильбертовом пространстве U, непрерывное отображение
85
F : O → X и произвольная функция J : X × O → R. Если существуют
множество Λ, отображение F∗ : O → Λ и функции L : X × O × Λ → R,
J∗ : O × Λ → R такие, что
1) L(F (u), u, λ) = J(F (u), u)
∀(u, λ) ∈ O × Λ;
2) L(x, u, F∗(u)) = J∗(u, F∗(u))
∀(x, u) ∈ X × O;
3) ∀(u, λ) ∈ O×Λ существует непрерывное отображение x → Lu(x, u, λ) :
X → U,
то в любой точке u ∈ O функция u → J(F(u),u) дифференцируема и выпол-
нены соотношения
J (F (u), u) = J∗(u, F∗(u)),
∇uJ(F(u),u) = Lu(F(u),u,F∗(u)).
Доказательство леммы 1. Первое соотношение очевидно следует из
условий 1) и 2). Кроме этого, с учетом 3) для любых u ∈ O и ũ из окрестно-
сти u внутри O справедливо
J (F (ũ), ũ) - J(F (u), u) = L(F (ũ), ũ, F∗(ũ)) - L(F (u), u, F∗(u)) =
= L(F(ũ), ũ,F∗(u)) - L(F(ũ),u,F∗(u)) =
= 〈Lu(F (ũ), u, F∗(u)), ũ - u〉 + o(||ũ - u||).
Отсюда ввиду непрерывности F и x → Lu(x, u, F∗(u))
J (F (ũ), ũ) - J(F (u), u)
lim
= 〈Lu(F (u), u, F∗(u)), e〉 , e ∈ SU ,
ũ→u
||ũ - u||
где SU := {e ∈ U : ||e|| = 1}, что завершает доказательство дифференцируе-
мости и второго соотношения.
В дальнейшем будет удобно использовать следующее вспомогательное
утверждение (ACn×n([0; T ]) - пространство абсолютно непрерывных на от-
резке [0; T ] матричных функций размеров n × n).
Лемма 2. Для любого допустимого управления u на множестве
ACn×n([0;T]) × Rn×n существует единственное непрерывно зависящее от
изменений u ∈ U решение (N, NT ) уравнений
˙
(Π.1)
N
(t) = A(u(t))N(t) + N(t)A(u(t))T + G(u(t))N(t)G(u(t))T, N(0) = N0,
(Π.2)
A(uT )NT + NT A(uT )T + G(uT )NT G(uT )T
+ N(T) = 0,
причем значение функционала (6) удовлетворяет равенству
∫T
J (u) = tr [Q(u(t))N(t)] dt + tr [Q(uT )NT ] .
0
Доказательство леммы 2. Уравнения (Π.1) и (Π.2) представляют
собой линейную матричную задачу Коши и линейное матричное алгебраи-
ческое уравнение (обобщенное уравнение Ляпунова), разрешимые раздельно.
86
Существование и единственность решения в условиях задачи (5)-(6), а также
его непрерывная зависимость от параметров хорошо известны [8, 9]. Исполь-
зуя формулу Ито [3], нетрудно проверить следующие равенства:
⎡
⎤
∫
N (t) = E[x(t)x(t)T], NT = E ⎣ x(t)x(t)Tdt⎦ ,
T
где x(t) - сильное решение уравнения (5). Остается записать исходя из (6),
что
⎡+∞
⎤
∫
∫
T
J (u) = E⎣ x(t)TQ(u(t))x(t)dt⎦ = tr [Q(u(t))N(t)] dt + tr [Q(uT )NT ] .
0
0
Доказательство утверждения 1. Дано число T > 0. Положим в
условиях леммы 1 X = ACn×n([0; T ]), O = U = Lm2([0; T ]), отображение F
определим как решение уравнения (Π.1), функцию J будем считать задан-
ной на X × O формулой (8). Далее, определим Λ = X, отображение F∗ - как
единственное решение задачи Коши
M (t) = -M(t)A(u(t)) - A(u(t))TM(t) - G(u(t))TM(t)G(u(t)) + Q(u(t)),
M (T ) = -αI,
а функции L и J∗ - формулами
L(N, u, M) = Jα(u) + tr [M(T )N(T )] - tr [M(0)N(0)] -
∫T
[
- tr
M (t)N(t) +
0
(
)]
+ M(t)
A(u(t))N(t) + N(t)A(u(t))T + G(u(t))N(t)G(u(t))T
dt,
J∗(u,M) = -tr [M(0)N0] .
Справедливость условий 1)-2) леммы 1 очевидна (в самом деле, условие 1)
следует из (Π.1) и конструкции L, а отображение F∗ построено непосред-
ственно исходя из 2)), условие 3) следует из исходных требований на отобра-
жения A, G, Q. Применяя лемму 1, а затем лемму 2, завершаем доказатель-
ство.
Доказательство утверждения 2. Положим в условиях леммы 1
X = Rn×n, U = Rm, O = S, отображение F определим как решение урав-
нения (Π.2) при N(T ) = N0, функцию J будем считать заданной на X × O
формулой (9). Далее, определим Λ = X, отображение F∗ - как единственное
решение обобщенного уравнения Ляпунова
Q(uT ) - MT A(uT ) - A(uT )TMT - G(uT )TMT G(uT ) = 0,
87
а функции L и J∗ - формулами
L(NT , u, MT ) =
[
(
)]
= Jc(u) - tr
MT
A(uT )NT + NT A(uT )T + G(uT )NT G(uT )T + N0
,
J∗(u,MT ) = -tr [MT N0] .
Справедливость условий 1)-3) леммы 1 вновь очевидна. Остается применить
ее, а затем лемму 2.
Доказательство утверждения 3. Дано число T > 0. Положим в
условиях леммы 1 X = ACn×n([0; T ]) × Rn×n, U = Lm2([0; T ]) × Rm, O = UT ,
отображение F определим как решение уравнений (Π.1), (Π.2), функцию J
будем считать заданной на X × O формулой (7). Далее, определим Λ = X,
отображение F∗ - как единственное решение системы уравнений
M (t) = -M(t)A(u(t)) - A(u(t))TM(t) - G(u(t))TM(t)G(u(t)) + Q(u(t)),
M (T ) = MT ,
Q(uT ) - MT A(uT ) - A(uT )TMT - G(uT )TMT G(uT ) = 0,
а функции L и J∗ - формулами
L(N, NT , u, M, MT ) = J∗(u) + tr [M(T )N(T )] - tr [M(0)N(0)] -
∫T
[
- tr
M (t)N(t) +
0
(
)]
+ M(t)
A(u(t))N(t) + N(t)A(u(t))T + G(u(t))N(t)G(u(t))T
dt -
[
(
)]
−tr
MT
A(uT )NT + NT A(uT )T + G(uT )NT G(uT )T + N(T )
,
J∗(u,M,MT ) = -tr[M(0)N0] .
Для завершения доказательства вновь последовательно применяем леммы 1
и 2.
В заключение отметим, что утверждения 1-3 вовсе не обязательно дока-
зывать, опираясь на весьма общую лемму 1. В частности, в [5, 6] утвержде-
ния 1 и 2 были доказаны непосредственным анализом приведенных выше
конструкций L с использованием аналогов леммы 2. Лемма 1, в свою оче-
редь, выделяет и обобщает до абстрактного уровня ключевую концепцию,
присущую каждому из трех доказанных утверждений.
СПИСОК ЛИТЕРАТУРЫ
1. Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. М.: Наука,
2002.
2. Rumyantsev D., Tsarkov K. On Certainty Equivalence Property in Deterministic LQ-
problems with Random Initial Data and Information Constraints // Proceedings of
the 15th International Conference “Stability and Oscillations of Nonlinear Control
Systems” (Pyatnitskiy’s Conference) (STAB-2020, Moscow). М.: IEEE, 2020.
88
3. Королюк В.С., Портенко Н.И., Скороход А.В., Турбин А.Ф. Справочник по тео-
рии вероятностей и математической статистике. М.: Наука, 1985.
4. Онегин Е.Е. Оптимальная стабилизация квазилинейной стохастической систе-
мы с управляемыми параметрами // Мехатроника, автоматизация, управление.
2019. Т. 20. № 10. С. 589-599.
5. Хрусталев М.М., Румянцев Д.С., Царьков К.А. Оптимизация квазилинейных
стохастических систем диффузионного типа, нелинейных по управлению //
АиТ. 2017. № 6. С. 84-105.
Khrustalev M.M., Rumyantsev D.S., Tsarkov K.A. Optimization of Quasilinear
Stochastic Control-nonlinear Diffusion Systems // Autom. Remote Control. 2017.
V. 78. No. 6. P. 1028-1045.
6. Onegin E., Khrustalev M. Optimal Stabilisation of a Quasilinear Stochastic System
with Controllable Parameters // Proceedings of the 14th International Conference
“Stability and Oscillations of Nonlinear Control Systems” (Pyatnitskiy’s Conference)
(STAB-2018, Moscow). М.: IEEE, 2018.
7. Онегин Е.Е., Хрусталев М.М. Субоптимальная стабилизирующая стратегия
управления линейной стохастической системой с управляемыми параметрами //
Труды 13-го Всероссийского совещания по проблемам управления (ВСПУ XIII,
Москва, 2019). М.: ИПУ РАН, 2019. С. 870-874.
8. Hartman P. Ordinary Differential Equations. John Wiley & Sons, 1964.
9. Damm T. Rational Matrix Equations in Stochastic Control. Springer-Verlag Berlin
Heidelberg, 2003.
Статья представлена к публикации членом редколлегии А.И. Маликовым.
Поступила в редакцию 07.03.2021
После доработки 27.04.2021
Принята к публикации 30.06.2021
89