Автоматика и телемеханика, № 2, 2021
Линейные системы
© 2021 г. В.В. АВЕТИСЯН, д-р физ.-мат. наук (vavetisyan@ysu.am)
(Ереванский государственный университет)
ОПТИМАЛЬНОЕ ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЕ
ПЕРЕМЕЩЕНИЕМ СХВАТА ДВУЗВЕННОГО МАНИПУЛЯТОРА
С УЧЕТОМ ТИПА КОНЕЧНОЙ КОНФИГУРАЦИИ
Рассматривается задача оптимального по быстродействию управления
перемещением точечного схвата плоского двузвенного манипулятора с
прямолинейными звеньями равной длины и со вторым статически урав-
новешенным звеном. На плоскости обобщенных координат манипулятора
построены области достижимых конфигураций, позволяющие из двух ко-
нечных конфигураций, соответствующих заданному терминальному по-
ложению схвата, определить ту конфигурацию и тот способ управления
манипулятором, при которых обеспечивается перемещение схвата из на-
чального положения покоя в заданное конечное положение покоя за ми-
нимальное время. Численными расчетами установлено, что оптимальный
выбор типа конечной конфигурации может приводить к значительному
увеличению быстродействия.
Ключевые слова: двузвенный манипулятор, оптимальное по быстродей-
ствию управление, конечный тип конфигурации.
DOI: 10.31857/S000523102102001X
1. Введение
В различных отраслях современного производства широко применяются
двузвенные роботы-манипуляторы. Используются они как самостоятельно,
так и в составе конструкций многозвенных манипуляционных роботов та-
ких, для которых именно эти два звена выполняют основной объем движе-
ний робота при выполнении им различных технологических операций. По-
этому разработка эффективных режимов управления двузвенным роботом-
манипулятором по сей день представляет собой актуальную задачу. Одним
из возможных подходов к рациональному расчету режимов управления явля-
ется их оптимизация по отношению к некоторому критерию качества функ-
ционирования манипулятора (время транспортных операций, энергозатраты
и т.д.). Существенной составляющей при формировании оптимальных алго-
ритмов управления движением двузвенника является учет его конструктив-
ных и геометрических особенностей. Для плоского двузвенного манипуля-
тора каждому положению схвата отвечают две возможные конфигурации,
отличающиеся знаком угла между звеньями. Следовательно, качество пере-
мещения схвата в терминальное положение зависит как от типа конечной
конфигурации, так и от способа управления, приводящего манипулятор в
3
эту конфигурацию. В [1, 2] для двузвенного манипулятора с безынерционны-
ми звеньями построены оптимальные и субоптимальные законы управления
в двухточечной задаче перемещения схвата с грузом. Выявлена существен-
ная зависимость времени приведения схвата в терминальное состояние от ти-
па конфигурации манипулятора и решена задача выбора оптимального типа
конфигурации. В [3] разработан графоаналитический подход к построению
субоптимальных по быстродействию программных управлений, приводящих
двузвенный манипулятор с произвольными геометрическими и инерционны-
ми характеристиками из начальной конфигурации покоя в произвольную
конечную конфигурацию покоя. Методам оптимизации для решения задачи
управления роботами, в том числе двузвенными манипуляторами, и расчета
их конструктивных параметров посвящены публикации [4-8]. В [9-11, 12] рас-
смотрены модели механического и электромеханического плоскoго двузвен-
ного манипулятора со вторым статически уравновешенным звеном и с про-
извольными инерционными характеристиками. В предположении, что кон-
струкция манипулятора допускает полный поворот звеньев в направлениях
по часовой и против часовой стрелки, установлено, что в одну и ту же конеч-
ную конфигурацию манипулятор можно привести при различных сочетани-
ях поворотов звеньев. Для каждого из двух типов конечных конфигураций
графоаналитической процедурой решена задача выбора направлений пово-
ротов звеньев манипулятора и определения способа управления, при кото-
рых заданный критерий качества (быстродействие [9, 10], энергозатраты [12]
и комбинированный от них функционал [11]) достигает минимального зна-
чения. Прямым вычислением найден оптимальный тип конечной конфигура-
ции. В [13] методом параметрической оптимизации построено субоптимальное
по квадратичному функционалу управление движением плоского двузвенни-
ка с учетом возможных конфигураций манипулятора, соответствующих за-
данным положениям схвата в начале и в конце движения.
В настоящей статье рассматривается механическая модель двузвенного
манипулятора [3], конструкция которого в отличие от [3, 9-12] допускает
лишь пол-оборота вращений звеньев в положительном и отрицательном на-
правлениях. На плоскости обобщенных координат манипулятора построены
области, позволяющие по заданным координатам терминального положения
схвата манипулятора определить тип конечной конфигурации и способ управ-
ления, при которых обеспечивается перемещение схвата из начального поло-
жения покоя в заданное конечное положение покоя за минимальное время.
2. Расчетная модель манипулятора
Рассмотрим механическую двузвенную систему, состоящую из двух аб-
солютно жестких звеньев G1, G2 равной длины, соединенных шарниром O2.
Звено G1 при помощи шарнира O1 связано с неподвижным основанием. Шар-
ниры являются идеальными, цилиндрическими, а их оси параллельны друг
другу. На конце второго звена в точке O3 укреплен схват. Будем предпола-
гать, что линейные размеры схвата много меньше длин звеньев и при исследо-
вании транспортных движений считать схват материальной точкой. Управле-
ние манипулятором осуществляется с помощью двух независимых приводов
4
D1, D2. Привод D1 осуществляет взаимодействие первого звена с основанием,
а D2 - взаимодействие между звеньями G1, G2 манипулятора. Управляющи-
ми функциями в исследуемой модели манипулятора являются величины M1,
M2 - вращающие моменты относительно осей O1, O2, развиваемые привода-
ми D1, D2 соответственно. Описанная система совершает плоскопараллель-
ное движение в горизонтальной плоскости, перпендикулярной осям шарниров
O1, O2.
Уравнения Лагранжа, описывающие движение рассматриваемой системы,
имеют вид [3]:
(I1 + m2L2)ϕ1 + m2Llf1(ϕ1,ϕ2,ϕ˙2,ϕ2) = M1 - M2,
I2 ϕ2 + m2Llf2(ϕ1,ϕ2,ϕ˙1,
ϕ1) = M2,
(2.1)
f1(ϕ1,ϕ2,ϕ˙2,
ϕ2) =
ϕ2 cos(ϕ1 - ϕ2) +ϕ˙22 sin(ϕ1 - ϕ2),
f2(ϕ1,ϕ2,ϕ˙1,
ϕ1) =
ϕ1 cos(ϕ1 - ϕ2) -ϕ˙21 sin(ϕ1 - ϕ2).
Здесь введены следующие обозначения: ϕ1 - угол между осью O1x и пря-
мой O1O2; ϕ2 - угол между осью O1x и прямой O2C, проходящей через центр
масс C звена G2; L = |O1O2| = |O2O3| - длина первого и второго звеньев;
l = |O2C| - расстояние от оси O2 до центра масс звена G2; I1, I2 - моменты
инерции звеньев G1, G2 относительно осей шарниров O1, O2 соответственно;
m - масса звена G2. Примем, что положительное направление отсчета углов
ϕ1 и ϕ2 ведется против часовой стрелки от прямой O1x.
В данной статье будем рассматривать частный случай манипулятора (2.1),
когда второе звено манипулятора статически уравновешено, т.е. в (2.1) l = 0:
(2.2)
(I1 + m2L2)ϕ1 = M1 - M2, I2ϕ2 = M2.
На управляющие моменты M1, M2 имеются ограничения
(2.3)
|M1| ≤ M01,
|M2| ≤ M02,
где M01, M02 - заданные постоянные.
3. Постановка задачи
Цель управления манипулятором состоит в приведении схвата в задан-
ное пространственное положение в предположении, что конструкция мани-
пулятора допускает лишь пол-оборота вращений звеньев в положительном
и отрицательном направлениях. Из геометрии двузвенника следует, что при
плоскопараллельном движении положение схвата полностью определяется,
например, декартовыми координатами проекции точки O3 на горизонталь-
ную плоскость. Задание обобщенных координат ϕ1, ϕ2 однозначно определяет
положение точечного схвата, поскольку между декартовыми координатами
проекции точки O3 и обобщенными координатами ϕ1, ϕ2 существует одно-
значная связь
(3.1)
x = L(cosϕ1 + cosϕ2), y = L(sinϕ1 + sinϕ2
).
5
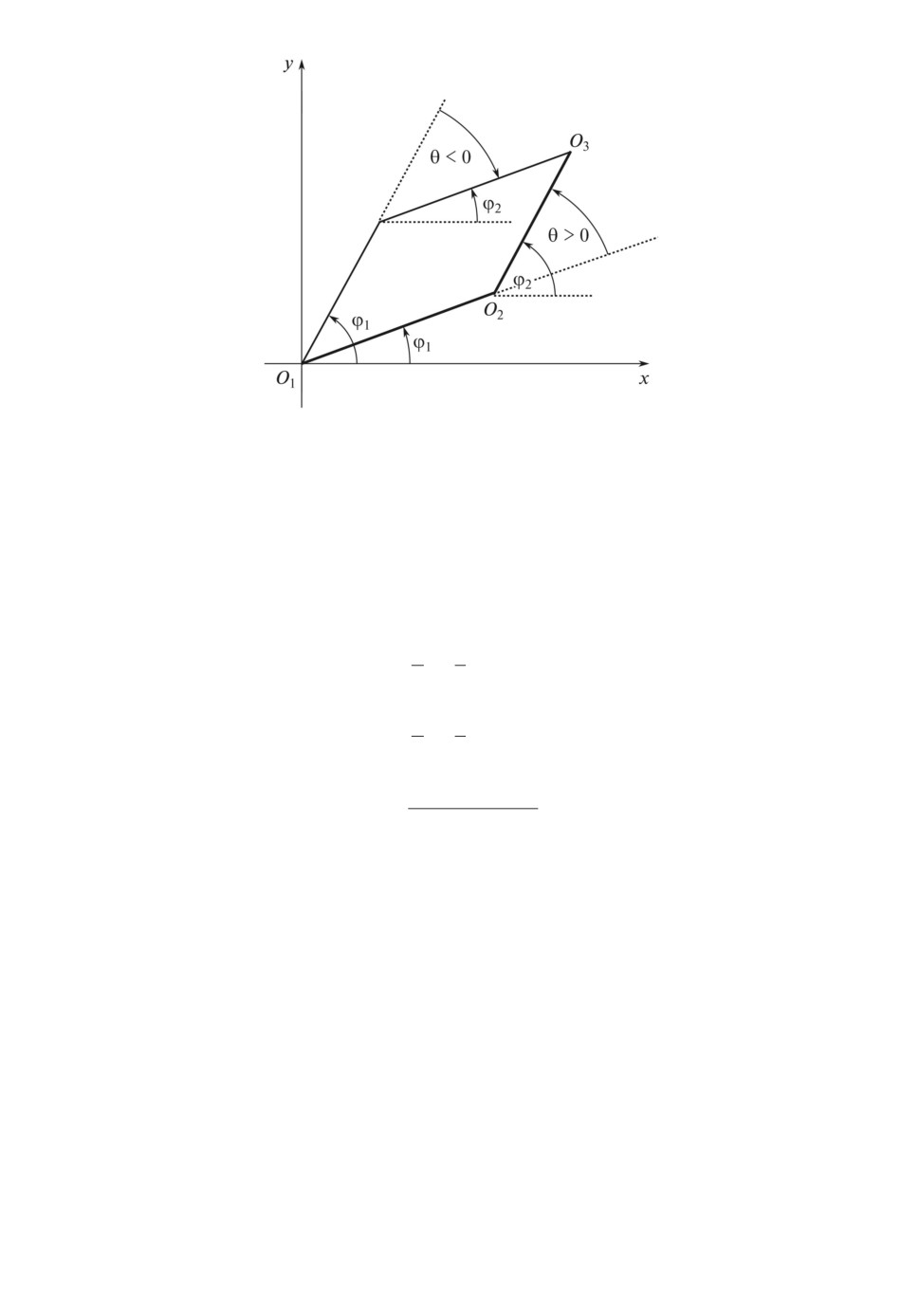
Рис. 1. Положению схвата Q3 соответствуют две конфигурации двузвенника,
отличающиеся знаком угла между звеньями θ = ϕ2 - ϕ1.
Однако углы ϕ1, ϕ2 определяются по декартовым координатам x, y неодно-
значно. С учетом конструктивных ограничений двузвенника разрешим систе-
му уравнений (3.1) относительно ϕ1, ϕ2 и выберем из них те решения, которые
по модулю не больше π:
1
|ϕ1| =arctgy
-
Kδ + πα(x)signy
π,
≤
x
2
1
(3.2)
|ϕ2| =arctgy
+
Kδ + πα(x)signy
π,
≤
x
2
)
2
(x2 + y2 - 2L
{ 0, x > 0,
K = ±1, δ = arccos
,
α(x) =
2L2
1, x ≤ 0.
Из (3.2) вытекает, что{каждому положению}схвата (x, y) внутри рабочей
зоны манипулятора R =
(x, y) : x2 + y2 ≤ 4L2
соответствуют две конфигу-
рации двузвенника, отличающиеся знаком угла между звеньями θ = ϕ2 - ϕ1
(рис. 1). Величина δ в (3.2) - угол при вершинах O1 и O3 треугольника
O1O2O3. Как следует из (3.2), значениям K = 1 и K = -1 отвечают конфи-
гурации, для которых соответственно θ > 0 и θ < 0, т.е. K = signθ. Конфи-
гурация, отвечающая значению K = 1, 0 < θ < π, показана на рис. 1 жирной
сплошной линией, а конфигурация K = -1, -π < θ < 0 - тонкой сплошной
линией. Если обозначить их через {ϕ1(x, y), ϕ2(x, y)}K , K = ±1, то согласно
(3.2) между углами ϕ1, ϕ2, отвечающими различным значениям K, имеется
следующая связь:
(3.3)
ϕ1(x,y)|K=-1 = ϕ2(x,y)|K=+1, ϕ2(x,y)|K=-1 = ϕ1(x,y)|K=+1
(в дальнейшем аргументы (x, y) функций ϕi(x, y) будут опускаться).
6
Таким образом, на плоскости обобщенных координат манипулятора
(3.4)
Φ = {ϕ1,ϕ2 : -π ≤ ϕ1,ϕ2
≤ π}
точки (ϕ1, ϕ2), (ϕ2, ϕ1), отвечающие конфигурациям
{ϕ1, ϕ2}K=1,
{ϕ2, ϕ1}K=-1 соответственно, симметричны относительно биссектрисы I
и III квадрантов и при этом
(ϕ1, ϕ2) ∈ {ϕ1, ϕ2 ∈ Φ : ϕ2 ≥ ϕ1} = Φ(+1),
(3.5)
(ϕ2, ϕ1) ∈ {ϕ1, ϕ2 ∈ Φ : ϕ2 ≤ ϕ1} = Φ(-1).
Систему (2.2) будем рассматривать при начальных условиях
(3.6)
ϕi(0) = ϕi,
ϕi
(0) = 0, i = 1, 2,
которым согласно (3.1) соответствует начальное положение покоя схвата
x(0) = L(cos ϕ01 + cos ϕ02) = x0,
x(0) = 0,
(3.7)
y(0) = L(sin ϕ01 + sin ϕ02) = y0,
y(0) = 0.
Пусть заданы несовпадающие начальное (x0, y0) (3.7) и конечное (xT , yT )
положения схвата в рабочей зоне м{нипуля}ора R. Так как положению
(xT , yT ) отвечают две конфигурации
ϕT1 , ϕT
, K = ±1, то в качестве ко-
2
K
нечных условий для системы (2.2) рассмотрим условия
(3.8)
ϕi
K(T) = ϕTiK,
ϕi |K
(T ) = 0, i = 1, 2; K = ±1,
которым однозначно соответствует одно и то же положение покоя схвата
(
)
x(T ) = L
cos ϕT1
K + cos ϕT2
K
=xT,
x(T ) = 0,
(3.9)
(
)
K = ±1.
y(T ) = L
sin ϕT1
K + sin ϕT2
K
=yT,
y(T ) = 0,
Система (2.2), (2.3) полностью управляема в классе кусочно-непрерывных
функций M1(t), M2(t) [14], поэтому при заданных краевых состояниях схвата
(3.7), (3.9) каждой совокупности условий (3.8) (K = ±1) и каждому допусти-
мому управлению M = (M1(t), M2(t)) соответствует некоторое время переме-
щения
[{
}
]
(3.10)
T =T ϕT1,ϕT2
K,M .
Рассмотрим следующую задачу оптимального по быстродействию управ-
ления перемещением схвата манипулятора с учетом конечного типа конфи-
гурации.
Задача. Определить тип K = ±1 конечной конфигурации (3.8) и закон
изменения ограниченного управления M = (M1(t), M2(t)) (2.3), доставляю-
щие минимум
[{
}
]
(3.11)
T∗ = minminT ϕT1,ϕT2
K,M
K
M
при приведении схвата манипулятора из начального состояния покоя (3.7) в
заданное состояние покоя (3.9).
7
4. Построение оптимального по быстродействию управления
Внутренний минимум в (3.11) является задачей построения оптимально-
го по быстродействию управления M = (M1, M2) системой (2.2), (2.3), (3.6),
(3.8) для фиксированного значения K. При решении этой задачи в краевых
условиях (3.8) параметр{K буде}м опускать, подразумевая тем самым, что
конечная конфигурация
ϕT1 , ϕT2
отвечает одному из значений K = +1 или
K = -1.
В (2.2), (2.3), (3.1), (3.6)-(3.9) перейдем к безразмерным переменным
(
(
))1/2
(
)
t′ =
M02/
m2L2
t,
I′i = Ii/
m2L2
,
M′i = Mi/M02,
(4.1)
x′ = x/L, y′ = y/L, ϕ′i = ϕi - ϕ0i, ϕ′i0,T = ϕ0,Ti - ϕ0i, i = 1,2.
Если теперь опустить штрихи, то соотношения (2.2), (2.3), (3.1), (3.2),
(3.6)-(3.9) упростятся: в них получим ϕ01,2 = 0, L = 1, M02 = 1, а система (2.2),
ограничения (2.3) и краевые условия (3.6), (3.8) примут вид:
(4.2)
(I1 + 1)ϕ1 = M1 - M2, I2ϕ2 = M2,
(4.3)
|M1| ≤ M01,
|M2
| ≤ 1,
(4.4)
ϕi(0) = 0,
ϕi
(0) = 0, i = 1, 2,
(4.5)
ϕi(T ) = ϕi ,
ϕi
(T ) = 0, i = 1, 2.
Заменой переменных
(4.6)
q1 = (I1 + 1)ϕ1 + I2ϕ2, q2 = I2ϕ2
система (4.2) приводится к простейшей форме, отвечающей разделению дви-
жений по координатам q1, q2:
(4.7)
q1 = M1,
q2 = M2.
Начальные и конечные условия для системы (4.7) согласно (4.4)-(4.6), име-
ют вид:
(4.8)
q1(0) = q01 = 0, q2(0) = q02 = 0,
q1,2(0) = 0,
(4.9)
q1(T) = qT1 = (I1 + 1)ϕT1 + I2ϕT2 , q2(T) = qT2 = I2ϕT2 ,
q1.2(T ) = 0.
Решение задачи об оптимальном по быстродействию управлении для си-
стемы, описываемой отдельно каждым из уравнений (4.7), известно (см. [15])
и имеет вид:
{
M0isign(qTi ), t ∈ [0,τi),
M∗i =
-M0isign(qTi ), t ∈ [τi,Ti],
(4.10)
(
)
qT/M0
Ti = 2τi = 2
1/2 , i = 1, 2; M02 = 1.
i
i
Управление M∗i(t) переводит систему, описываемую уравнением qi = Mi
с ограничением |Mi| ≤ M0i, за минимально время Ti из состояния qi(0) = 0,
qi(0) = 0 в состояние qi(Ti) = qTi ,
˙qi(Ti) = 0.
8
Заметим, что минимальное значение времени перехода системы (4.7) из
состояния (4.8) в состояние (4.9) не может быть меньше наибольшего из двух
минимальных значений времени перехода, соответствующих рассмотренным
независимым подсистемам (4.7) при соответствующих граничных условиях.
Таким образом, искомое время быстродействия равно
(4.11)
T = max(T1,T2
).
Возможны следующие случаи.
A1. Если T1 > T2, то M1(t) = M∗1, а M2(t) является любым допустимым
управлением, осуществляющим требуемый переход за время T1. При этом на
плоскости (q1, q2) неравенству T1 > T2 в силу (4.10) отвечает область, опре-
деляемая неравенством
qT/M0
qT
(4.12)
1
1
>
2
.
A2. Если T2 > T1, которому на плоскости (q1, q2) отвечает область, опре-
деляемая неравенством
>
(4.13)
qT2
qT1 /M01,
то, наоборот, M2(t) = M∗2, а M1(t) является любым допустимым управлением,
осуществляющим требуемый переход за время T2.
A3. Если T1 = T2 = T , то M1(t) = M∗1, M2(t) = M∗2 только для тех точек
на плоскости (q1, q2), для которых
(4.14)
qT1/M01 =
qT2
.
В случаях A1 и A2 будем задавать управления M2(t) и M1(t) в следующих
формах соответственно:
signqT2 , t ∈ [0, τ(1)2),
M2(t) =
0,
t ∈ [τ(1)2,τ(2)2),
-signqT2 , t ∈ [τ(2)2,T1],
(4.15)
M01signqT1 , t ∈ [0,τ(1)1),
M1(t) =
0,
t ∈ [τ(1)1,τ(2)1),
-M01signqT1 , t ∈ [τ(2)1,T2],
имеющих по две точки переключения и принимающих по модулю значения,
не превосходящие максимальных.
Интегрируем уравнения (4.7) с краевыми условиями (4.8), (4.9) при управ-
лениях (4.15) на интервалах времени [0, T2] и [0, T1]:
q2(T) = τ(1)2τ(2)2sign(qT2 ) = qT2 ,
(4.16)
˙q2(T) = sign(qT2 )(τ(1)2 + τ(2)2 - T1) = 0,
q1(T) = τ(1)1τ(2)1M01sign(qT1 ) = qT1 ,
(4.17)
˙q1(T) = M01sign(qT1 )(τ(1)1 + τ(2)1 - T2) = 0.
9
j2
F12
p
F12
+
F
2
+
F
1
-p
0
p
j1
-
F
1
-
F
2
-p
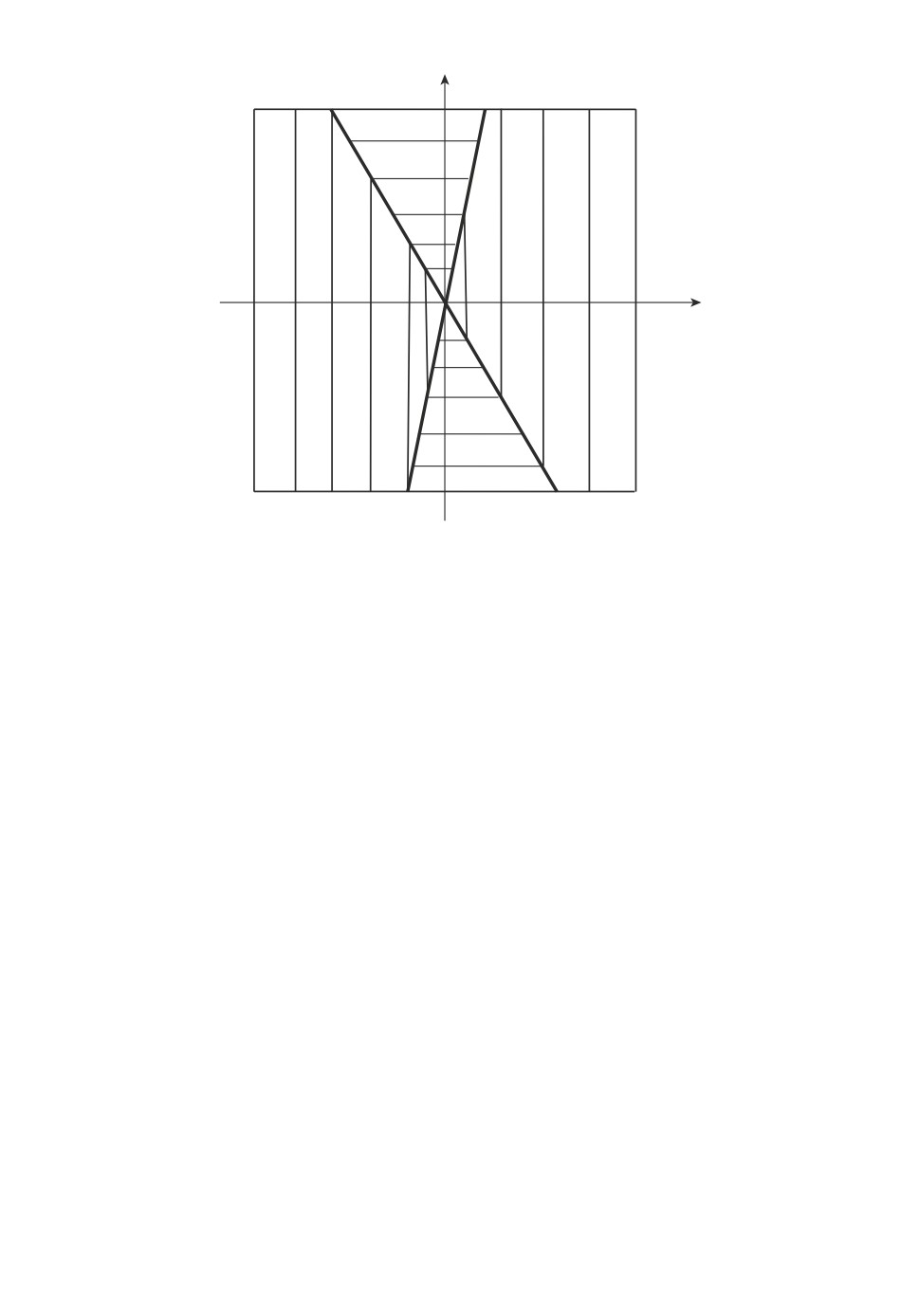
Рис. 2. В областях (Φ+1 ∪ Φ-1) и (Φ+2 ∪ Φ-2) реализуются случаи A1 (T1 > T2) и
A2 (T2 > T1) соответственно, а в областях Φ12 и Φ21 - случай A3 (T1 = T2).
Решение системы (4.16) и (4.17) относительно параметров τ(1)2, τ(2)2 и
τ(1)1,τ(2)1 соответственно не является единственным. Единственность гаранти-
руется условиями τ(1)i ≤ τ(2)i, i = 1, 2, в соответствии с (4.15). Разрешив систе-
му (4.16), (4.17) с учетом этих замечаний и переходя к исходным переменным
по формулам (4.6), получим, что в случаях A1, A2 моменты переключения
управлений M2(t), M1(t) (4.15) определяются по следующим формулам соот-
ветственно:
(
)1/2
τ(1)2 = T1/2 -
T21/4 -
I2ϕT2
,
(
)1/2
(4.18)
(A1, M2) :τ(2)
= T1/2 +
T21/4 -
I2ϕT2
,
2
(
)1/2
T1 = 2
(I1 + 1)ϕT1 + I2ϕT2 /M01
,
(
)1/2
τ(1)1 = T2/2 -
T22/4 -
(I1 + 1)ϕT1 + I2ϕT2 /M01
,
(
)1/2
(4.19)
(A2, M1) :τ(2)
= T2/2 +
T22/4 -
(I1 + 1)ϕT1 + I2ϕT2/M0
,
1
1
(
)1/2
T2 = 2
I2ϕT2
Неравенствам (4.12) и (4.13) в исходных переменных (4.6) на плоскости
(ϕ1, ϕ2) отвечают области (Φ+1 ∪ Φ-1) и (Φ+2 ∪ Φ-2), в которых реализуются
случаи A1 (T1 > T2) и A2 (T2 > T1) соответственно. На рис. 2 области Φ+1, Φ-1
заштрихованы вертикальными, а области Φ+2, Φ-2 - горизонтальными линия-
ми. В обозначениях этих областей нижний индекс определяет номер управ-
ляющего момента, имеющего одно переключение, а верхний - знак этого
10
управления на первом интервале. В соответствии со случаем A3 (T1 = T2),
на границах Φ12 (изображены жирными линиями) между областями Φ+i, Φ-i
реализуются режимы управления с одним переключением. Аналитические
выражения областей Φ+i(ϕ1, ϕ2), Φ-i(ϕ1, ϕ2), выводимые из (4.12)-(4.14), име-
ют вид:
Φ+1 = {ϕ1,ϕ2 ∈ Φ : -Aϕ1 < ϕ2 < Bϕ1, ϕ1 > 0} ,
(4.20)
Φ-1 = {ϕ1,ϕ2 ∈ Φ : Bϕ1 < ϕ2 < -Aϕ1, ϕ1 < 0} ,
Φ+2 = {ϕ1,ϕ2 ∈ Φ : Bϕ1 < ϕ2,ϕ1 > 0 и - Aϕ1 < ϕ2, ϕ1 < 0} ,
(4.21)
Φ-2 = {ϕ1,ϕ2 ∈ Φ : ϕ2 < -Aϕ1,ϕ1 > 0 и ϕ2 < Bϕ1, ϕ1 < 0} ,
(4.22)
Φ12 = Φ+,+1,2 ∪ Φ+,-1,2 ∪ Φ-,+1,2 ∪ Φ-,-1,2,
Φ+,+1,2 = {ϕ1,ϕ2 ∈ Φ : ϕ2 = Bϕ1, ϕ1 > 0} ,
Φ-,+1,2 = {ϕ1,ϕ2 ∈ Φ : ϕ2 = -Aϕ1, ϕ1 < 0} ,
Φ+,-1,2 = {ϕ1,ϕ2 ∈ Φ : ϕ2 = -Aϕ1, ϕ1 > 0} ,
Φ-,-1,2 = {ϕ1,ϕ2 ∈ Φ : ϕ2 = Bϕ1, ϕ1 < 0} ,
(4.23)
A = (I1 + 1)(M01 + 1)-1I-12, B = (I1 + 1)(M01 - 1)-1I-12.
В обозначениях областей (4.22) нижние индексы указывают номера управ-
лений с одним переключением, а верхние - знаки этих управлений на первом
интервале.
Замечание. При построении диаграммы (рис. 2) было принято, что ма-
нипулятор характеризуется размерными параметрами, фигурирующими в
(2.2), (2.3),
L = 1 м, m2 = 10 кг, I1 = I2 = (10/3) кг · м2,
(4.24)
M01 = 2 н · м, M02 = 1 н · м,
которые отвечают манипулятору, звенья которого - одинаковые однородные
стержни.
После перехода к безразмерным параметрам согласно (4.1) получим из
(4.24), что
(4.25)
L = 1, m2 = 1, I1 = I2 = 1/3, M01 = 2, M02
= 1.
Отметим, что суть методики решения поставленной задачи не меняется
при других геометрических и физических параметрах манипулятора.
Подытожив полученные результаты, оптимальный режим управления си-
стемой (4.2)-(4.5) можно представить в виде
(M∗1, M2), (ϕT1 , ϕT2 ) ∈ Φ+1 ∪ Φ-1,
(4.26)
M∗ =
(M1, M∗2), (ϕT1 , ϕT2 ) ∈ Φ+2 ∪ Φ-2,
(M∗1, M∗2), (ϕT1 , ϕT2 ) ∈ Φ12,
11
где управления M∗i, Mi, i = 1, 2 определяются формулами (4.10), (4.15),
(4.18), (4.19), а Φ+i, Φ-i, i = 1, 2, и Φ12 - формулами (4.20)-(4.22).
Таким образом, построенная диаграмма позволяет по заданным значениям
ϕT1 , ϕT2 находить тип режима управления, моменты переключения и время
процесса. Тип управления определяется в зависимости от того, какой области
достижимых конечных конфигураций принадлежат данные терминальные
значения ϕT1 , ϕT2 .
5. Определение оптимального типа конечной конфигурации манипулятора
Перейдем к определению внешнего минимума в (3.11). Пусть конеч-
ное положение схвата (xT , yT ) ∈ R зафиксировано. Тогда из формулы (3.2)
найдем две конечные точки (ϕT1 , ϕT2 ) ∈ Φ(+1), (ϕT2 , ϕT1 ) ∈ Φ(-1) (3.4), кото-
{
}
рые согласно (3.3) отвечают конфигурациям манипулятора
ϕT1 , ϕT
и
2
K=+1
{
}
ϕT1 , ϕT
соответственно.
2
K=-1
Введем обозначения:
G1(1) = {ϕ1,ϕ2 ∈ Φ : ϕ1 ≤ ϕ2 ≤ Bϕ1, ϕ1 > 0} ⊂ Φ+1 ⊂ Φ(1),
G2(1) = Φ+2(ϕ1,ϕ2) ⊂ Φ(1),
G3(1) = {ϕ1,ϕ2 ∈ Φ : -ϕ1 ≤ ϕ2 ≤ -Aϕ1, ϕ1 < 0} ⊂ Φ-1 ⊂ Φ(1),
(5.1)
{
}
G4(1) =
ϕ1,ϕ2 ∈ Φ : -A-1ϕ1 ≤ ϕ2 ≤ -ϕ1, ϕ1 < 0
⊂ Φ-1 ⊂ Φ(1),
{
}
G5(1) =
ϕ1,ϕ2 ∈ Φ : B-1ϕ1 ≤ ϕ2 ≤ -A-1ϕ1, ϕ1 < 0
⊂ Φ-1 ⊂ Φ(1),
{
}
G6(1) =
ϕ1,ϕ2 ∈ Φ : ϕ1 ≤ ϕ2 ≤ B-1ϕ1, ϕ1 < 0
⊂ Φ-1 ⊂ Φ(1).
Поскольку области Φ(1), Φ(-1) взаимно симметричны относительно
прямой ϕ2 = ϕ1, то при замене ϕ1 → ϕ2, ϕ2 → ϕ1 области Gi(1) ⊂ Φ(1),
i = 1,...,6, перейдут на симметричные относительно прямой ϕ2 = ϕ1 области
Gi(-1) ⊂ Φ(-1), i = 1, . . . , 6, соответственно (см. рис. 3).
Области Gi(1), i = 1, . . . , 6, находятся над прямой ϕ2 = ϕ1, изображенной
на рис. 3 штриховой линией, а области Gi(-1), i = 1, . . . , 6, - под прямой
ϕ2 = ϕ1. Таким образом, если (ϕT1 ,ϕT2 ) ∈ Gi(1), то (ϕT2 ,ϕT1 ) ∈ Gi(-1). Каждой
из этих точек, в зависимости от их принадлежности областям Gi(1), Gi(-1),
1 ≤ i ≤ 6, отвечает оптимальное время перемещения схвата в эту конфигура-
цию при соответствующем оптимальном режиме управления (4.26):
(
)1/2
T = T1(ϕT1 ,ϕT2 ) = 2
(I1 + 1)ϕT1 + I2ϕT2/M0
,
1
если (ϕT1 , ϕT2 ) ∈ G1,3,4,5,6(1),
(
)1/2
T = T2(ϕT1 ,ϕT2 ) = 2
I2ϕT2
,
если (ϕT1 , ϕT2 ) ∈ G2(1),
(5.2)
(
)1/2
T = T1(ϕT2 ,ϕT1 ) = 2
(I1 + 1)ϕT2 + I2ϕT1 /M01
,
если (ϕT1 , ϕT2 ) ∈ G1,2,3,4,6(-1),
(
)1/2
T = T2(ϕT2 ,ϕT1 ) = 2
I2ϕT1
если (ϕT2 , ϕT1 ) ∈ G5(-1).
12
j2
j2 = -Aj1
j2 = Bj1
j2 = -j1
p
j2 = j1
G2(1)
G3(1)
G1(1)
T2(j1, j
2
)
T1
G4(1)
T1
j2 = A-1j
G1(-1)
1
j1
j2 = B-1
G5(1)
-p
G2(-1)
p
j1
T1(jT, jT )
G3(-1)
G6(1)
T1
T1
T2
G6(-1)
G5(-1)
G4(-1)
-p
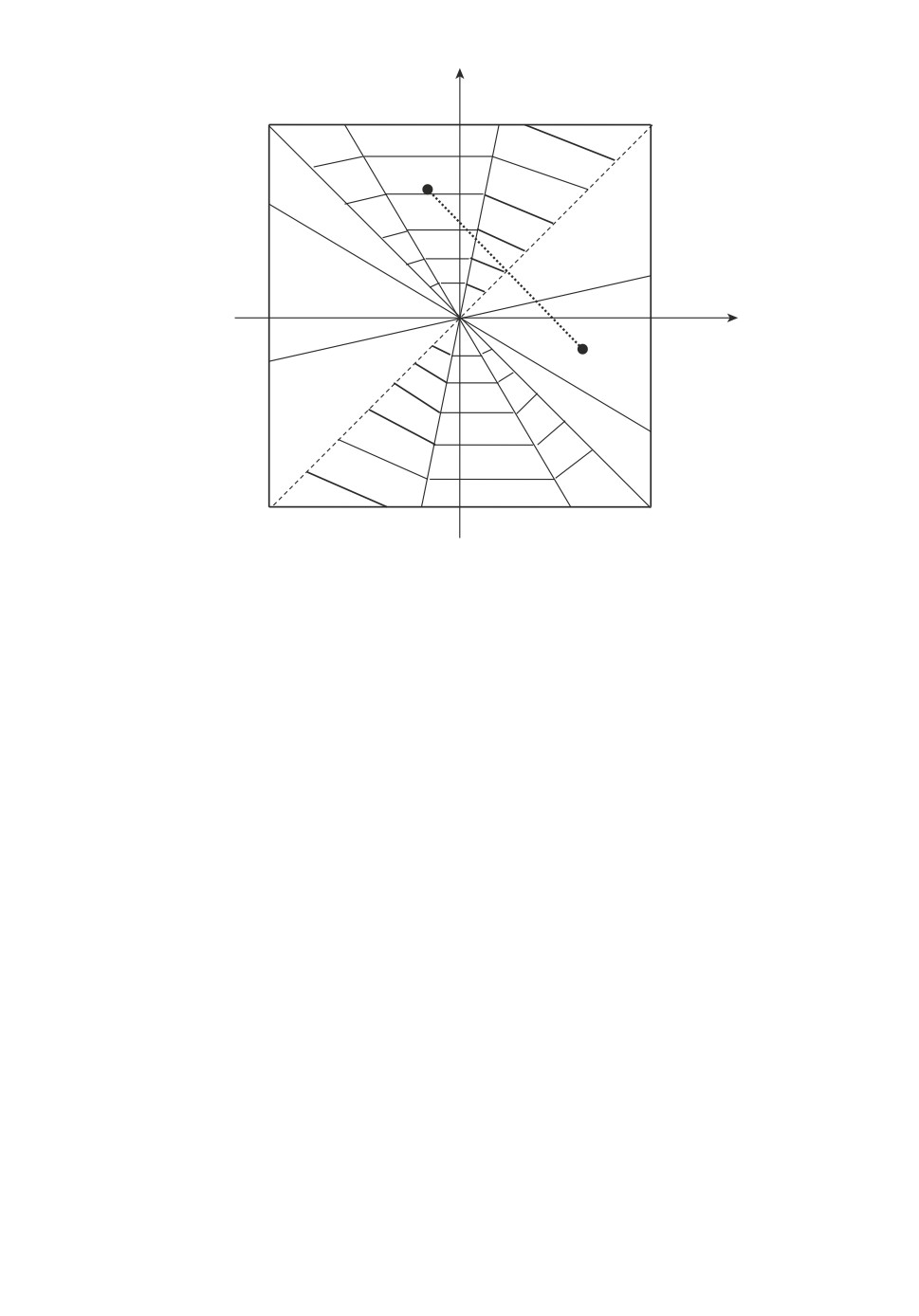
Рис. 3. Диаграмма для определения оптимального типа конечной конфигура-
ции и оптимального типа режима управления.
Учитывая (5.2), вычисление внешнего минимума в (3.11) сводится к вы-
бору оптимальной из двух конечных конфигураций в задаче
[
]
(5.3)
T∗ = min T(ϕT1 ,ϕT2 )
(ϕT
(ϕT
,
,ϕT2 )∈Gi(1) ,T(ϕ2 ,ϕ1 )
,ϕT1 )∈Gi(-1)
1
2
1 ≤ i ≤ 6.
Произведя вычисления минимума в (5.3) при числовых значениях (4.25),
в итоге получаем
T1(ϕT1 ,ϕT2 ), если (ϕT1 ,ϕT2 ) ∈ G1(1) ∪ G3(1),
T2(ϕT1 ,ϕT2 ), если (ϕT1 ,ϕT2 ) ∈ G2(1),
(5.4)
T∗ =
T2(ϕT2 ,ϕT1 ), если (ϕT2 ,ϕT1 ) ∈ G5(-1),
T2(ϕT2 ,ϕT1 ), если (ϕT2 ,ϕT1 ) ∈ G4(-1) ∪ G6(-1).
Расчетные результаты в соответствии с (5.4) представлены на диаграмме
рис. 3, которая позволяет определить оптимальный тип конечной конфигу-
рации и соответствующий оптимальный тип режима управления (4.15), при
помощи которых можно перевести схват манипулятора в заданное конечное
состояние, а также параметры для этого режима из (4.18), (4.19). Тип ко-
нечной конфигурации и режим управления устанавливается в зависимости
от областей, в которых лежат точки (ϕT1 , ϕT2 ) и (ϕT2 , ϕT1 ). На рис. 3 области
G1,2,3(1) и G4,5,6(-1) заштрихованы.
13
Приведем числовой пример. Для манипулятора с безразмерными парамет-
рами (4.25) начальные и конечные координаты схвата возьмем в виде
(5.5)
x0 = 2, y0 = 0, xT = 1, yT
= 0,5.
Значениям координат начального и терминального положений схвата (5.5)
соответствуют начальная конфигурация ϕ01 = ϕ02 = 0 и две конечные кон-
фиграции (3.3), которым отвечают две симметричные относительно прямой
ϕ2 = -ϕ1 точки на плоскости углов манипулятора (углы даны в радианной
и градусной мерах):
{
}
(5.6)
ϕT1 , ϕT
: (ϕT1 , ϕT2 ) = (-0,514 рад, 1,441 рад) = (-29◦45′, 82◦56′
),
2
K=1
{
}
(5.7)
ϕT1 , ϕT
2
: (ϕT2 , ϕT1 ) = (1,441 рад, -0,514 рад) = (82◦56′, -29◦45′
).
K=-1
Из диаграммы рис. 3 находим, что в рассматриваемом случае (ϕT1 , ϕT2 ) ∈
∈ G2(1), a (ϕT2 ,ϕT1 ) ∈ G2(-1). Следовательно, согласно формуле (5.4) ми-
нимальное время перемещения схвата достигается в точке (5.6), которой
соответствует конечная конфигурация, отвечающая значению K = 1. При
этом следует использовать режим управления M∗ = (M1, M∗2) (4.26), где
M1 - управление с двумя переключениями в моменты τ(1)1 = 0,0784 (0,1754 c),
τ(2)1 = 1,3078 (2,9257 c), M∗2
с одним переключением в момент τ2 = 0,6931
(1,5505 c), а оптимальное время перемещения T∗ = T2 = 1,3862 (3,1011 c).
В скобках даны размерные значения времен с использованием формул пе-
рехода (4.1). Для сравнения отметим, что если выбрать конечную конфигу-
рацию (5.7), то время перемещения схвата оказывается намного хуже: T∗ =
= T1 = 1,8708 (4,1853A).
6. Заключение
На конфигурационной плоскости двузвенного манипулятора со вторым
статически уравновешенным звеном построены области, позволяющие по за-
данным координатам терминального положения схвата манипулятора опре-
делить тип конечной конфиграции и структуру оптимального управления,
приводящего манипулятор в эту конфигурацию, при которых достигается ми-
нимальное значение времени перемещения схвата из начального положения
покоя в произвольное положение покоя рабочей зоны манипулятора. Числен-
ными расчетами установлено, что оптимальный выбор типа конечной конфи-
гурации может приводить к значительному увеличению быстродействия.
СПИСОК ЛИТЕРАТУРЫ
1. Болотник Н.Н., Каплунов А.А. Оптимальные прямолинейные перемещения
груза при помощи двузвенного манипулятора // Изв. АН СССР. Техн. киберн.
1982. № 1. С. 68-74.
2. Болотник Н.Н., Каплунов А.А. Оптимизация управления и конфигураций дву-
звенного манипулятора // Изв. АН СССР. Техн. киберн. 1983. № 4. С. 123-131.
14
3.
Avetisyan V.V., Bolotnik N.N., Chernousko F.L. Optimal Programmed Motions of a
Two-Link Manipulator // Soviet J. Comput. Syst. Sci. 1985. V. 23. No. 5. P. 65-73.
4.
Akulenko L.D., Bolotnik N.N., Chernousko F.L., Kaplunov A.A. Optimal Control of
Manipulation Robots // IFAC Proc. 1985. V. 17. Iss. 2. P. 311-315.
5.
Chernousko F.L., Akulenko L.D., Bolotnik N.N. Time-Optimal Control for Robotic
Manipulators // Optimal Control Applications and Methods. 1989. V. 10. Iss. 4.
P. 293-311.
6.
Болотник Н.Н., Черноусько Ф.Л. Оптимизация управления манипуляционными
роботами // Изв. АН СССР. Техн. киберн. 1990. № 1. С. 189-238.
7.
Meier E.B., Bryson A.E. Efficient Algorithm for Time-Optimal Control of a Two-
Link Manipulator // J. Guidance, Control and Dynamics. 1990. V. 13. Iss. 5.
P. 859-866.
8.
Chernousko F.L. Optimization in Control of Robots / Computational Optimal Con-
trol. Basel: Birkhause, 1994. P. 19-28.
9.
Аветисян В.В., Овакимян Н.В. Оптимальные плоскопараллельные движения
двузвенного манипулятора // Изв. РАН. Теория и системы управления. 1995.
№ 3. С. 161-168.
10.
Avetisyan V.V., Hovakimyan N.V. Constructing the Regions of Admissible States
of Positioning for a Two-Link Manipulator with Account of Speed Constraints //
J. Comput. Syst. Sci. Int. 1997. V. 36. Iss. 4. P. 638-646.
11.
Аветисян В.В. Оптимизация конфигурации и направлений поворотов звеньев
двузвенного манипулятора по комбинированным критериям качества // Изв.
НАН РА. Механика. 1998. T. 51. № 4. С. 65-71.
12.
Avetisyan V.V. Movements of an Electromechanical Manipulator Robot Optimal
with Respect to Energy Rxpenditure // J. Comput. Syst. Sci. Int. 1996. V. 35.
Iss. 4. P. 679-685.
13.
Demydyuk М.V., Hoshovs’ka N. Parametric Optimization of the Transport Opera-
tions of a Two-Link manipulator // J. Math. Sci. 2019. V. 238. No. 2. P. 174-188.
14.
Овсеевич А.И. О полной управляемости линейных динамических систем //
ПММ. 1989. Т. 53. Вып. 5. С. 845-848.
15.
Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Матема-
тическая теория оптимальных процессов. М.: Наука, 1983.
Статья представлена к публикации членом редколлегии А.А. Галяевым.
Поступила в редакцию 21.05.2020
После доработки 01.08.2020
Принята к публикации 10.09.2020
15