Автоматика и телемеханика, № 2, 2021
© 2021 г. В.Н. БУКОВ, д-р техн. наук (v_bukov@mail.ru)
(ОАО “Бортовые аэронавигационные системы”, Москва),
А.М. БРОННИКОВ, д-р техн. наук (bronnikov_a_m@mail.ru)
(Московский государственный технический университет им. Н.Э. Баумана),
И.Ф. ГАМАЮНОВ, канд. техн. наук (ilyagama@gmail.com)
(ВУНЦ ВВС “Военно-воздушная академия
им. проф. Н.Е. Жуковского и Ю.А. Гагарина”, Воронеж)
АНАЛИТИЧЕСКОЕ КОНФИГУРИРОВАНИЕ ИЗБЫТОЧНОЙ
СИСТЕМЫ С УПРАВЛЕНИЕМ ПО РАССОГЛАСОВАНИЮ
Развивается аналитический подход к управлению избыточностью тех-
нических систем на фоне осуществления в системе управления по рас-
согласованию. Новые результаты приводятся в сопоставлении с полу-
ченными ранее основными положениями подхода для случая внешнего
воздействия на избыточную систему. Получены условия допустимости и
формулы альтернативных конфигураций в двух вариантах: как только
достаточный и как необходимый и достаточный. Методические примеры
иллюстрируют применение полученных решений.
Ключевые слова: избыточная система, управление избыточностью, кон-
фигурация системы, допустимая конфигурация, передаточная матрица,
целевая функция, канонизация матриц.
DOI: 10.31857/S0005231021020021
1. Введение
Под конфигурацией избыточного оборудования понимается способ или схе-
ма выборочного соединения компонентов оборудования с целью достижения
заданной цели функционирования [1-5]. Чаще всего перестройке подверга-
ется вычислительная система [6-9], коммуникационная система [10-12] или
несколько систем сразу [13-15].
Одним из наиболее распространенных технических приложений использо-
вания избыточности является синтез отказоустойчивых систем управления,
для которых в случае отказа или повреждения одного из каналов управления
или передачи информации можно перераспределять его функции по остав-
шимся исправным каналам [11, 15].
Авторам не известны работы с постановкой и решением задачи, анало-
гичными рассматриваемой в статье. Так, например, в [15] решается задача
обеспечения неизменности управляющего воздействия на систему за счет ре-
конфигурации регулятора при возникновении отказа органов управления и
не затрагивается задача обеспечения неизменности передаточной матрицы по
рассогласованию. От других работ в области стабилизации свойств линейных
систем за счет управления избыточностью данную статью отличает, прежде
всего, представление традиционного регулятора в цепи обратной связи в ви-
де произведения интерфейсных и интеграционных матриц, что, по мнению
16
авторов, наиболее соответствует практическим нуждам. Новизной статьи от-
носительно предыдущих работ авторов является использование в качестве
целевой функции передаточной матрицы по рассогласованию.
Аналитический подход к управлению избыточностью оборудования с ли-
нейными стационарными моделями и названный здесь конфигурированием,
охватывает такие вопросы, как:
тестирование альтернативных конфигураций на их допустимость в смыс-
ле наличия возможности достижения целей функционирования системы в
соответствующей конфигурации,
интеграция избыточных компонентов в систему с едиными целями функ-
ционирования в смысле определения настроек системы (в основном алгорит-
мов ее вычислительных средств), обеспечивающих достижение этих целей
при выбранной допустимой конфигурации.
Данная статья нацелена на лаконичное изложение некоторых результа-
тов направления применительно к системам, подверженным внешним воз-
действиям, а также на получение аналогичных результатов для систем с так
называемым управлением по рассогласованию.
2. Исходные положения
Формальным объектом задачи конфигурирования (управления избыточ-
ностью) системы, подвергающейся внешнему воздействию [16, 17], являет-
ся линейная динамическая система, состоящая из объекта управления и из-
быточных в общем случае динамических компонентов комплекса оборудова-
ния (КО), вместе в линейном приближении описываемых уравнением с дис-
кретным временем τ = 1, 2, . . .
(1)
xτ+1 = Axτ + Buτ + Gvτ , xτ=0 = x0, yτ = Dxτ ,
а также избыточной бортовой интегрированной вычислительной среды,
функционирование которой в линейном приближении описывается форму-
лой
(2)
uτ = Q(z)yτ .
Здесь xτ - метавектор (составной вектор) состояния объекта и компонентов
размерности n на такте τ с известными начальными условиями x0, uτ - ме-
тавектор входов компонентов для межкомпонентных связей размерности l,
vτ - метавектор входов компонентов для внешних воздействий размерности k,
yτ - метавектор выходов всех компонентов размерности m, A - блочная чис-
ловая матрица собственной динамики объекта и компонентов размеров n × n,
B - блочная числовая матрица эффективности межкомпонентных связей раз-
меров n × l, G - блочная числовая матрица эффективности внешних воздей-
ствий размеров n × k, D - блочная числовая матрица формирования выходов
всех компонентов размеров m × n, z - оператор сдвига во времени на один
такт вперед [18, 19], Q(z) - передаточная матрица размеров l × m (по опера-
тору z) от метавектора выходов компонентов yτ к метавектору их входов для
межкомпонентных связей uτ , названная конфигурационной матрицей [16].
17
В настоящей статье основное внимание сосредоточено на системах с управ-
лением по рассогласованию выходов, в линейном приближении описываемых
уравнением и равенствами с дискретным временем τ = 1, 2, . . .
(3)
xτ+1 = Axτ +Buτ +Gvτ , xτ=0 = x0, yτ = Dxτ , uτ = Q(z)(yзадτ -yτ
),
где yзадτ - метавектор заданных значений выходов системы.
В задаче управления избыточностью линейной системы числовые матрицы
A, B, G и D в (1) и (3) полагаются фиксированными. Их значения опреде-
ляют динамические свойства как объекта, так и всех (используемых и неис-
пользуемых в текущий момент времени) располагаемых компонентов КО в
разрозненном состоянии.
Конфигурационная матрица Q(z) в (2) и (3) через размещение ненулевых
элементов (соответствует коммутированию входов и выходов соответствую-
щих компонентов) объединяет компоненты КО и объект в единую систему.
Посредством же конкретных значений ненулевых элементов она определя-
ет правила обработки данных вычислительными средствами. Таким образом
осуществляется подчинение функционирования системы (1), (2) или (3) об-
щим целям и удовлетворение предъявляемых требований.
Именно значения конфигурационной матрицы Q(z), а точнее, закономер-
ности возникновения и изменения множества ее в некотором смысле эквива-
лентных значений {Q(z)}κ, где κ - совокупное обозначение параметров, ва-
рьирование которых порождает это множество, являются предметом поиска,
исследования и практического использования в задаче управления избыточ-
ностью технической системы.
3. Передаточные матрицы системы
В развиваемом подходе требования к динамическим свойствам избыточ-
ной системы связываются со значениями передаточных матриц для вынуж-
денных составляющих:
замкнутой системы (1), (2) от внешних воздействий vτ к выходам yτ
[
]
(4)
(z)
= D(zIn - A - BQ(z)D)-1
G,
Wvy(z) = wvi.τyj.τ
m×k
где wvi.τyj.τ (z) - передаточная функция от i-го входа vi.τ к j-му выходу yj.τ , In -
единичная матрица размеров n × n;
замкнутой системы (3) от заданных значений yзадτ к выходам yτ
[
]
(5)
Wyзадy(z) = wyj.τ
(z)
= D(zIn - A + BQ(z)D)-1
BQ(z).
m×m
Рисунки 1 и 2 иллюстрируют структуры моделей, соответствующих пе-
редаточным матрицам (4) и (5). В зависимости от конкретных условий рас-
сматривается одна из этих передаточных матриц или они рассматриваются
совместно.
18
vt
G
xt + 1
ut
xt
yt
B
z-1
D
A
Q(z)
Рис. 1. Структура системы “объект + КО” с внешним воздействием.
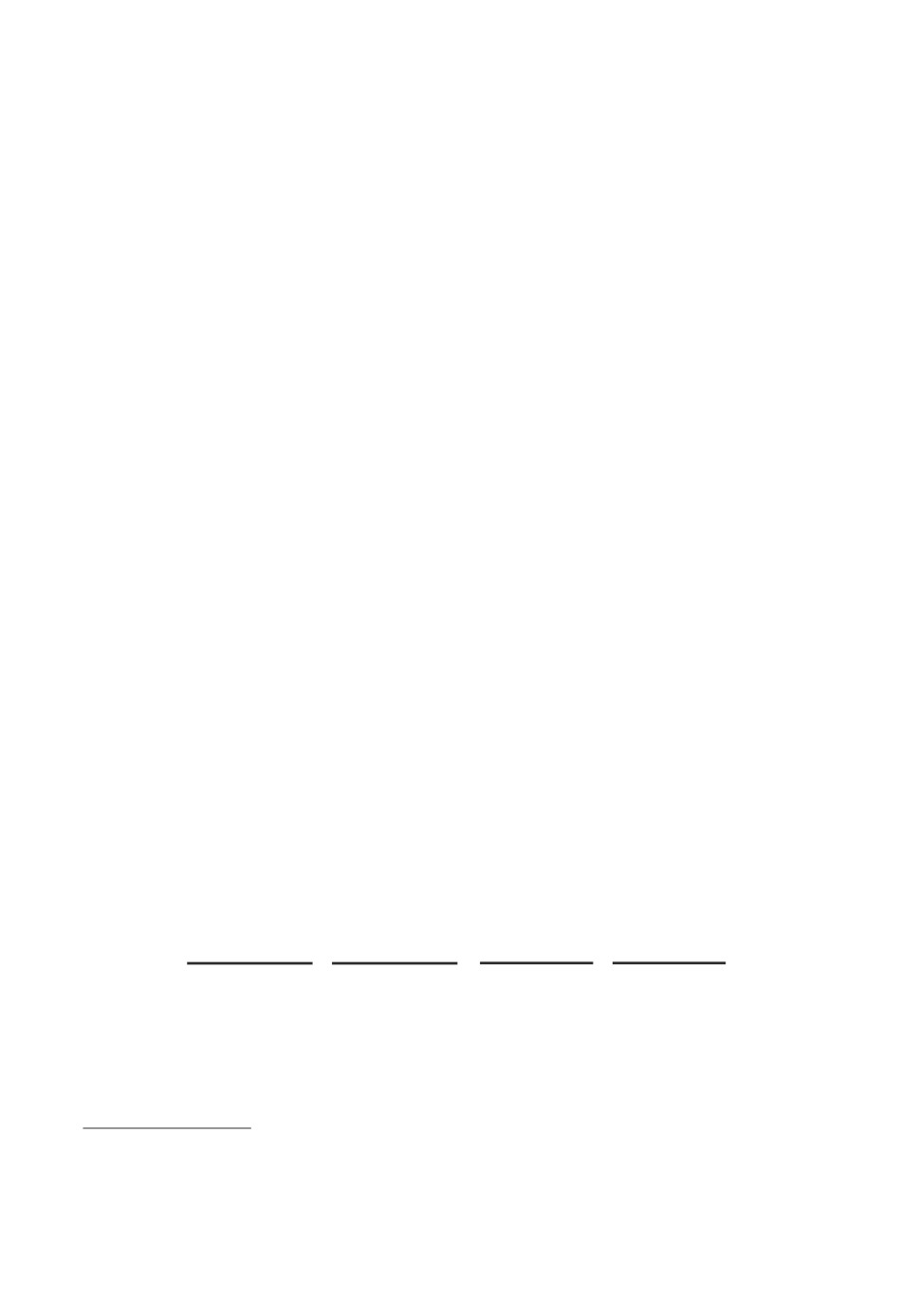
Рис. 2. Структуры системы “объект + КО” с управлением по рассогласованию
выходов: а исходная, б преобразованная к виду рис. 1.
Принципиальное различие моделей (4) и (5), определяющее структуры
матричных конструкций в основе решения задачи управления избыточно-
стью, заключается в том, что варьируемая конфигурационная матрица Q(z)
находится либо только в цепи обратной связи (рис. 1) от воздействия vτ до
выхода системы yτ , либо присутствует также и в цепи прямой связи (рис. 2)
от yзадτ до yτ .
4. Формулировка задачи и номинальная конфигурация
Для линейной динамической системы, описываемой передаточными мат-
рицами (4) или (5), вводится понятие целевой функции [17], отражающей
применение системы по назначению. В качестве такой функции для случая
внешних воздействий используются выборочные строки и столбцы переда-
точной матрицы (4) в соответствии с весовыми матрицами α размеров k × g
и β размеров f × m:
(6)
Φвозд(z) = βWvy(z)α = βD(zIn - A - BQ(z)D)-1
Gα.
В задаче управления по рассогласованию выходов используются выбороч-
ные строки и столбцы передаточной матрицы (5) с весовыми матрицами α
19
размеров m × g и β размеров f × m:
Φрасс(z) = βWyзадy(z)α = βD(zIn - A + BQ(z)D)-1
(7)
BQ(z)α.
Традиционная задача определения обратных связей (в общем случае речь
должна идти о множестве1 эквивалентных матриц Q(z)), обеспечивающих
требуемое значение Φвоздтреб(z) целевой функции для случая внешнего воздей-
ствия, заключается в разрешении уравнения (6), или значение Φрасстреб(z) - для
случая управления по рассогласованию выходов, связанное с решением урав-
нения (7). Это кратко можно записать диаграммой
Решение (6) или (7)
Φтреб(z)
=⇒
{Q(z)}κ.
При постановке задачи о конфигурировании (управлении избыточностью)
КО осуществляется расчленение этой диаграммы на два этапа. Первый из них
заключается в определении любого одного решения Qвоздном(z) для уравнения
(8)
Φвоздтреб(z) = βD(zIn - A - BQвоздном(z)D)-1
Gα
или Qномс(z) для уравнения
(9)
Φрасстреб(z) = βD(zIn - A + BQрассном(z)D)-1BQрассном
(z)α,
названного номинальной конфигурацией КО и устраивающего разработчика.
Для решения таких задач разработан широкий арсенал подходов и мето-
дов, использующих как строгие положения теорий управления и оптимиза-
ции [20-23], так и инженерные приемы и методики, основанные на опыте,
переносе отработанных на прототипах решений и пр. [24]. Примем, что как
минимум по одному решению Qвоздном(z) для (8) и Qномс(z) для (9) существуют.
Второй этап сосредоточен только на порождении множества решений, эк-
вивалентных номинальному в смысле неизменности значения целевой функ-
ции Φвоздтреб(z) или Φрасстреб(z), что записывается диаграммой
Решение (8) или (9)
(10)
Φтреб(z)
=⇒
Qном
=⇒
{Q(z)}κ
|
{z
}|
{z
}
Этап 1
Этап 2
Считается, что первый этап выполняется предварительно, и далее все вни-
мание сосредотачивается только на втором этапе. При этом существование
конфигураций Qвозд(z) и Qрасс(z), отличных от номинальных, пока остается
открытым вопросом.
1 В подавляющем большинстве применений различных подходов либо единственность
решения обеспечивается “излишними” условиями (например, процедуры типа метода наи-
меньших квадратов обеспечивают минимальность квадратичной нормы результата, что с
содержательной стороны не всегда имеет внятное обоснование), либо разработчик не по-
дозревает о существовании других эквивалентных решений поставленной задачи.
20
5. Формализация и допустимость конфигурации
Исследования показали, что решение уравнений (6) или (7) дает значения
матриц Q(z) с заполненными (не нулевыми) практически всеми их элемента-
ми, что противоречит физическому содержанию задачи, поскольку какая-то
(порой значительная) часть этих элементов должна принимать заведомо ну-
левые значения. Это отражает (формализует) управляемое отключение неко-
торых компонентов комплекса в реализуемой конфигурации системы.
Удачным разрешением указанной ситуации стало [16, 17] представление
конфигурационных матриц в виде произведения
(11)
Q(z) = CвхE(z)Cвых,
где Cвх и Cвых - распределительные матрицы размеров l × p и q × m, т.е.
матрицы, содержащие бинарные элементы и не более одного единичного эле-
мента в строке, названные интерфейсными матрицами [17], поскольку без
учета задержек моделируют функционирование входных и выходных интер-
фейсов всех компонентов и каналов связи между ними за исключением объек-
та, E(z) - в общем случае рациональная полиномиальная матрица размеров
p × q, моделирующая обработку вычислительными средствами всех посту-
пающих данных и задержек в интерфейсных устройствах и каналах связи,
названная интеграционной матрицей [17].
В выборе интерфейсных матриц Cвх и Cвых, осуществляемом преимуще-
ственно на основе инженерных доводов, заключается процесс конфигуриро-
вания избыточной системы, а определение интеграционной матрицы E(z) пу-
тем решения специальных матричных уравнений составляет процесс интегра-
ции избыточной системы.
Задача конфигурирования избыточной системы, подвергающейся внеш-
нему воздействию vτ , базирующаяся на уравнении (6) с заданным значени-
ем целевой функции (8), решена ранее. В [25] изложены формальные усло-
вия допустимости возможных конфигураций, задаваемых выбором Cвх и
Cвых, в [26] - решение основного уравнения интеграции для множества ин-
теграционных матриц {E(z)}κ, соответствующих допустимым конфигураци-
ям и заданной целевой функции, а в [27] - общая методика решения таких
задач.
Далее рассматривается только задача конфигурирования избыточной си-
стемы с управлением по рассогласованию выходов yзадτ - yτ , связанная с ре-
шением уравнения (7) и заданным значением целевой функции (9).
Как и ранее в задаче с внешним воздействием [25, 26], конфигурацию Q(z)
будем считать допустимой, если при выбранных матрицах Cвх и Cвых в систе-
ме (7) существует возможность (существует соответствующая E(z)) сохране-
ния неизменным значение целевой функции
Φрасстреб(z),
зафиксированное весовыми функциями α, β и номинальной конфигураци-
ей КО Qном(z) в соответствии с (9).
21
6. Управление по рассогласованию
Задача заключается в том, чтобы для целевой функции системы (9) опре-
делить допустимость заданных интерфейсных матриц Cвх, Cвых и при их
допустимости найти множество таких интеграционных матриц E(z), при ко-
торых значение целевой функции Φрасстреб(z) остается неизменным:
βD(zIn - A + BCвхE(z)CвыхD)-1BCвхE(z)Cвыхα = Φрасстреб
(12)
(z).
Уравнение (12) относительно неизвестной матрицы E(z) является основным
уравнением интеграции избыточной системы при управлении по рассогласо-
ванию выходов.
Далее используются обозначения канонизации [20] произвольной матри-
цы S ранга r: SL и SR - левый и правый делители нуля максимального ранга,
S∼L, S∼R и S∼ - левый, правый и сводный канонизаторы, удовлетворяющие
тождествам
SLS = 0, SSR = 0, S∼RS∼L = S∼ и S∼LSS∼R = Ir.
Неединственность указанных матричных образований позволяет отбирать
среди множества альтернатив упрощенные решения (с нулевыми и единич-
ными значениями элементов) для ускорения вычислений и обеспечения на-
глядности примеров [26].
Решение задачи сформулировано в виде двух теорем.
Теорема 1. Достаточным условием существования интеграционных
матриц E(z), обеспечивающих выполнение равенства (12) при заданных ин-
терфейсных матрицах Cвх и [вых, яв]ляется одновременное выполнение двух
условий с блочной матрицей
D α
(13)
BCвхLBQрассном(z)[ D α]
= 0,
[
]
[
]R
(14)
BQрассном(z)
D α
Cвых
D α
= 0,
при этом множество интеграционных матриц Eµ,η(z) описывается форму-
лой
[
](
[
])∼
{E(z)}µ,η = (BCвх)∼BQрассном(z)
D α
Cвых
D α
+
|
{z
}
Базовое решение
(15)
[
]L
+ BCвхRµ
+ηCвых
D α
,
|
{z
}
|
{z
}
Вариация
Вариация строк
столбцов
где µ и η - произвольные матрицы подходящих размеров, выбор которых
ограничен условием
(16)
det (zIn - A + BCвхEµ,η(z)Cвых
D) = 0.
22
Только достаточность теоремы 1 обусловлена удовлетворением требования
неизменности раздельно для знаменателя и числителя матричной дроби (12),
что исключает учет возможной компенсации их вариаций и тем самым значи-
тельно сужает множество получаемых решений. Вместе с тем теорема 1 обла-
дает двумя важными достоинствами: относительной вычислительной просто-
той и возможностью получения заведомо физически реализуемых решений,
т.е. решений в виде матриц E(z), степень полиномов числителей которых не
превышает степень полинома знаменателя.
Исчерпывающее же решение задачи дает следующая теорема.
Теорема 2. Необходимым и достаточным условием существования ин-
теграционных матриц E(z), обеспечивающих выполнение равенства (12)
при заданных интерфейсных матрицах Cвх и Cвых, является одновременное
выполнение двух условий разрешимости основного уравнения интеграции
(17)
ℵ(z)
LBCвхL (zIn - A)(βD)∼Φрасстреб
(z) = 0,
R
(18)
δξ(z)Cвых (α - Dδξ(z))
=0
и условия существования передаточной матрицы замкнутой системы
(19)
det (zIn - A + BCвхEξ,ϑ,ψ(z)Cвых
D) = 0,
где
(20)
ℵ(z) = BCвхL (zIn - A) βDR,
матрица δξ(z) принадлежит множеству, вычисляемому по формулам
(21)
{δ(z)}ξ = (βD)∼Φрасстреб(z) + βDRρξ
(z),
(22)
{ρ(z)}ξ = -(ℵ(z))∼BCL(zIn - A)(βD)∼Φрасстреб(z) +
ℵ(z)
Rξ
,
| {z
}
Вариация базового
решения на 2-м ярусе
ξ - матрица подходящих размеров с почти произвольными элементами,
обеспечивающими выполнение условий (18) и (19), при этом все множество
интеграционных матриц Eξ,ϑ,ψ(z) описывается формулой
{E(z)}ξ,ϑ,ψ = (BCвх)∼ (zIn - A) δξ(z)(Cвых (α - Dδξ(z)))∼
+
|
{z
}
Базовое решение
(23)
L
+ BCвхRϑ
+ψ Cвых (α - Dδξ(z))
,
|
{z
}
|
{z
}
Вариация стролбцов
Вариация строк
на 1-м ярусе
на 1-м ярусе
где ϑ и ψ - удовлетворяющие условию2 (19) произвольные матрицы подхо-
дящих размеров.
2 Строго говоря, условия (15) и (19) могут нарушаться в конечном числе значений z,
называемых полюсами соответствующих передаточных функций.
23
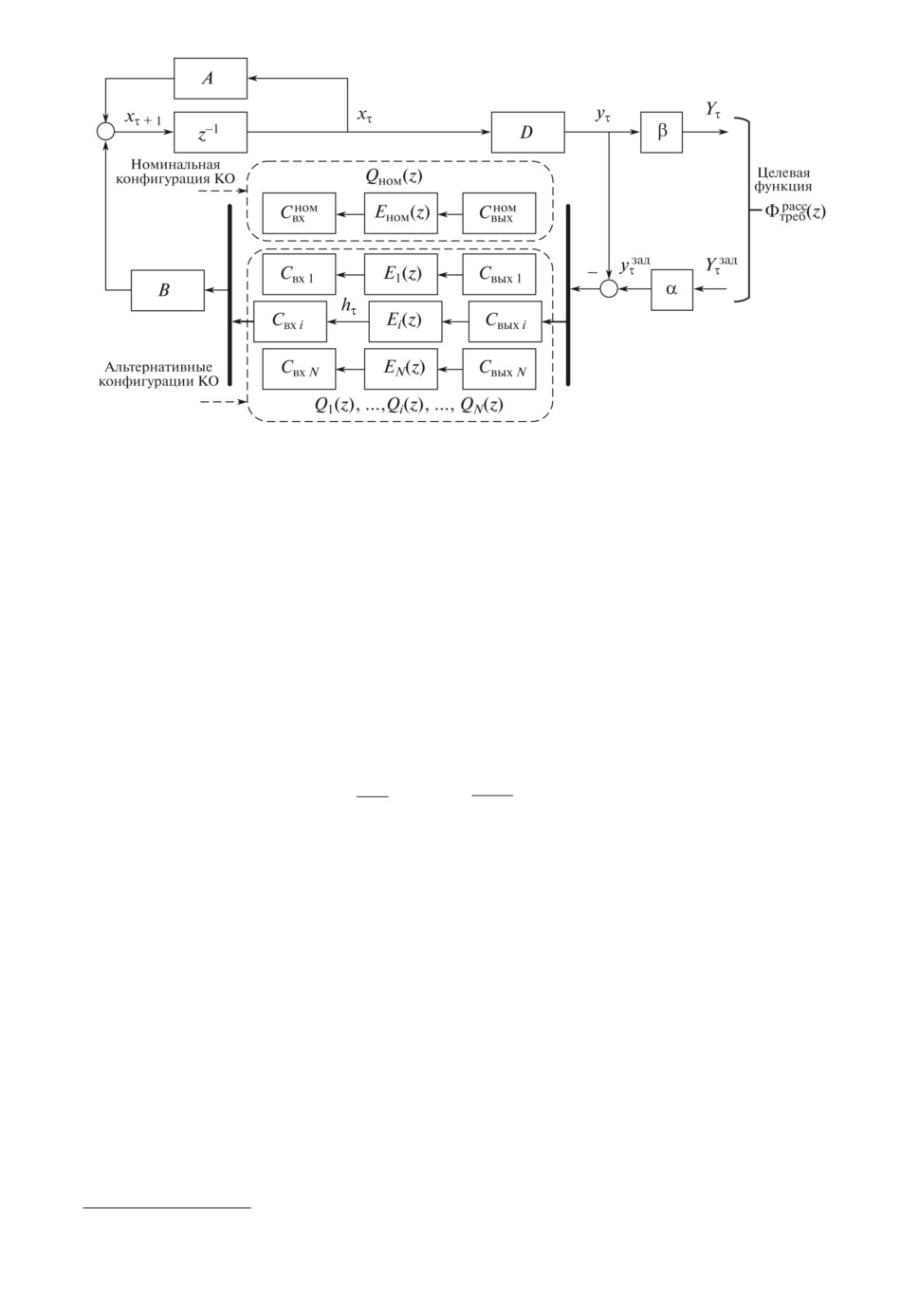
Рис. 3. Общая структура системы “объект + избыточный КО”.
Теорема 2 отличается от теоремы 1 существенно большей сложностью,
связанной с количеством процедур канонизации и “двухъярусностью” варьи-
рования решения: первого путем выбора матриц ϑ и ψ в формуле (23) с про-
веркой условия (19) и второго путем выбора матрицы ξ в формуле (22) с
проверкой условий (18), (19). При этом условие (17) по аналогии с результа-
тами [26] является автономным в том смысле, что не зависит от варьируемых
матриц.
Трудность использования теоремы 2 связана с неявным ограничением вы-
бора матрицы ξ в формуле (22) условиями (18) и (19) через формулу (21).
Способ прямого удовлетворения таких ограничений не найден, но в частных
весьма распространенных случаях при выполнении любого из двух равенств
(24)
βDR = 0, ℵ(z)R
=0
матрица δξ(z) принимает единственное значение, а условия (18) и (19) не
зависят от выбора ξ.
Доказательства теорем приведены в Приложении.
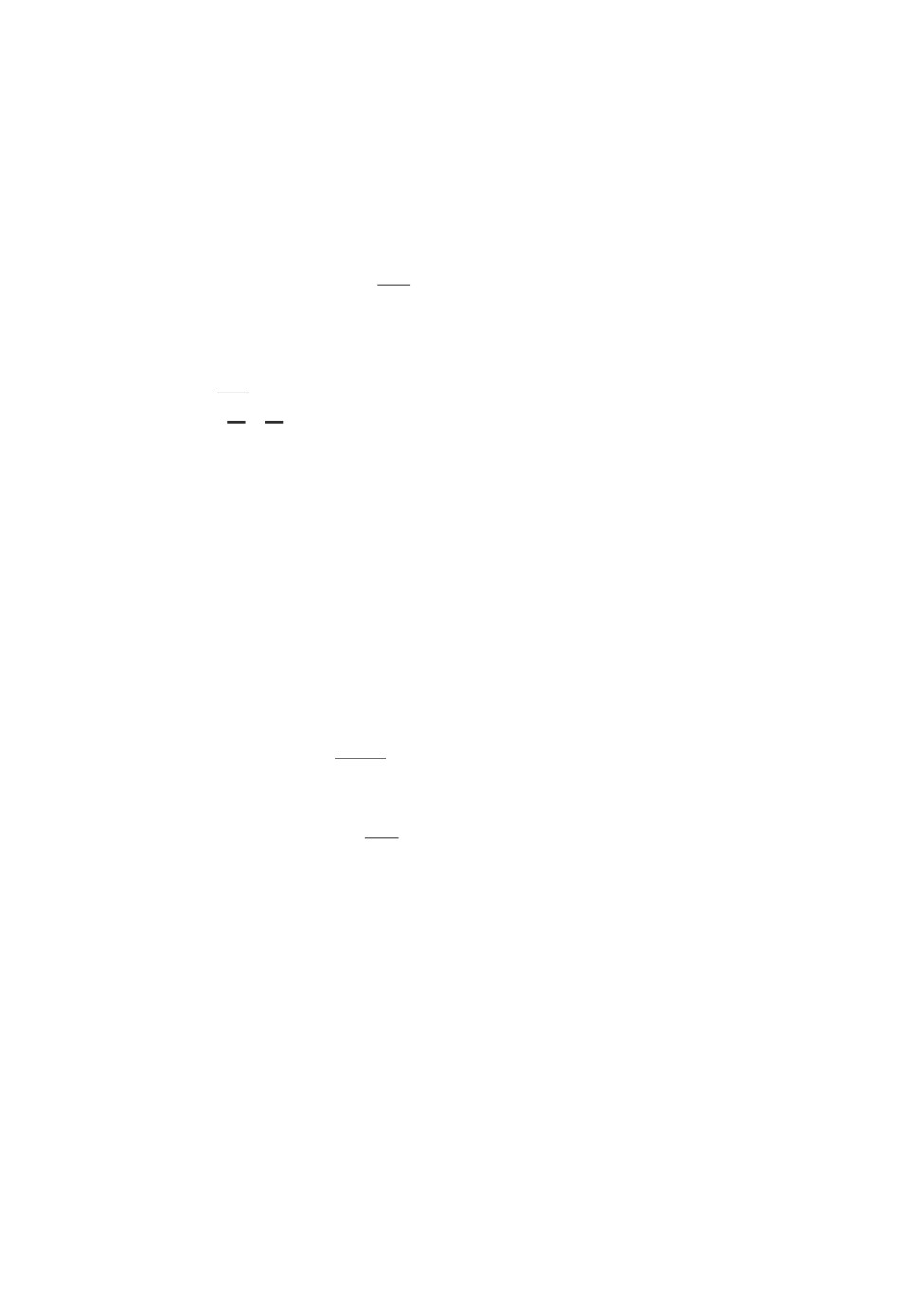
Обобщающая иллюстрация решенной задачи показана на рис. 3, где жир-
ными элементами условно показаны коммутационные средства, осуществ-
ляющие подключение эквивалентных по целевой функции номинальной или
одной из N альтернативных конфигураций.
Содержательное объяснение условий (24) сводится к следующему. Вве-
денная в (20) матрица ℵ(z) является фактором связности3 для динамической
системы
(25)
FhY(z) = βD(zIn - A)-1BCвх,
представляющей собой часть системы (12) от p-мерного выхода hτ всех вы-
числительных средств КО к тестовым выходам Yτ при оборванных связях
3 В [20] использован термин “матрица связности”, который здесь корректируется.
24
КО: E(z) = 0. Согласно теореме 2.4 и определению 2.6 из [20] любое из усло-
вий (24) соответствует отсутствию в системе (25) линейной зависимости вхо-
дов, обусловленной только ее внутренней связностью, т.е. без учета внешней
связности, формализуемой делителем нуля BCвхR и учитываемой явно в (23).
На рис. 3 показано положение вектора hτ , относящегося к определению функ-
ции (25).
7. Примеры
Управление самолетом. Пример из [25] с упрощенной моделью продольно-
го движения самолета преобразуем к задаче управления по рассогласованию
выходов (7). Соответствующие матрицы имеют значения:
1
0
0
a1
a2
0
0
0
0
1
0
A= a3 a4
0
,B= b1
b2
,D=
0
1
0
,
0
a2
1
0
0
0
0
1
−1 0 1
1
0
0
1
α=
0
,
βT =
0
0
0
0
0
Номинальная конфигурация задана следующими значениями матриц:
[
]
[
]
1
1
0
0
0
0
Cномвх =
,
Cномвых =
,
0
0
1
0
0
0
[
]
a3
a4 - aж
a3
a4 - aж
0
0
0
,
Eном(z) =
,
Qном = b1
b1
b1
b1
0
0
0
0
0
Φрасстреб(z) =a3
z-aж
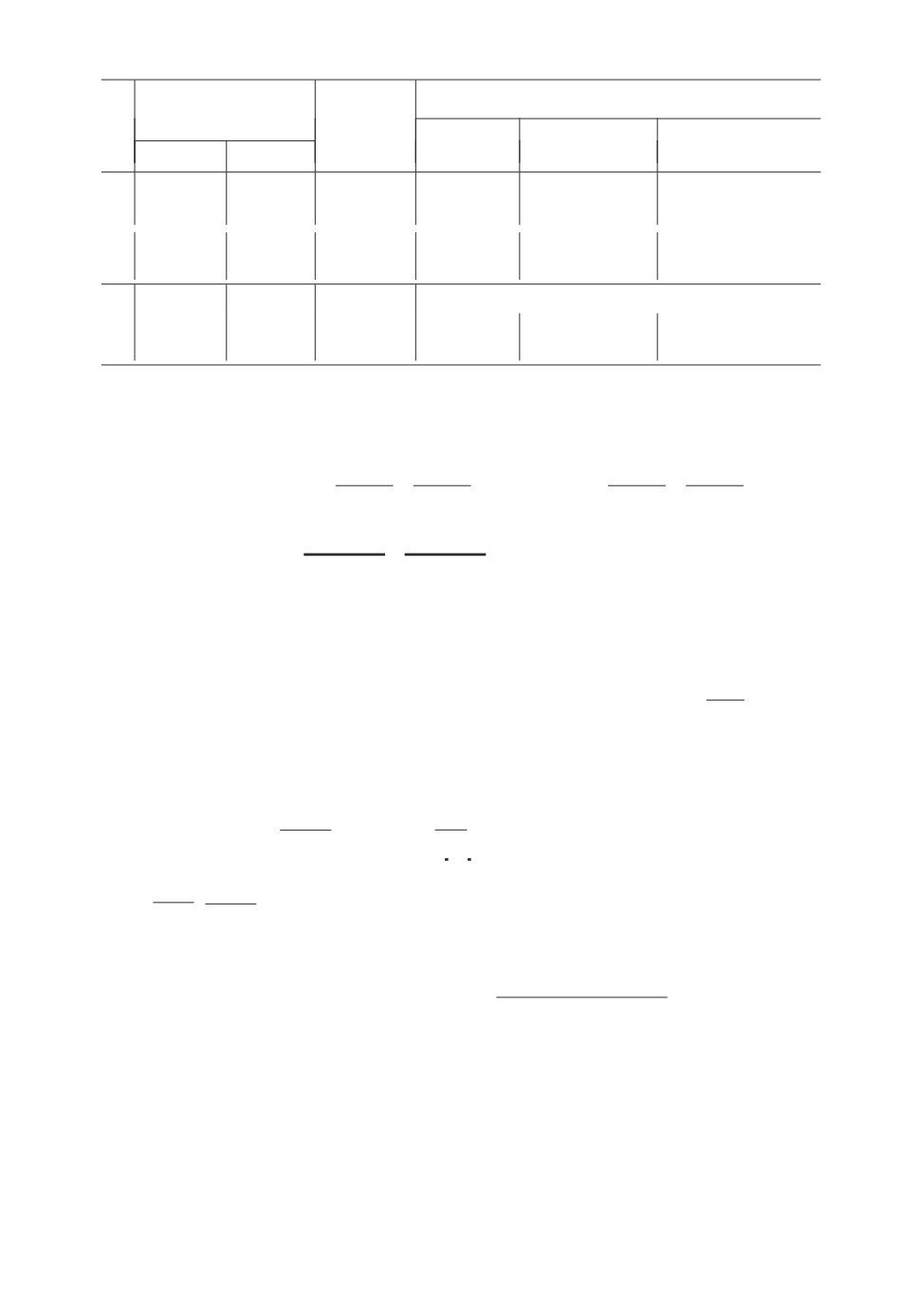
В рамках примера для различных вариантов конфигураций выполнены
вычисления в соответствии теоремами 1 и 2 с привлечением программы
MatLab. Полученные результаты с целью проверки подставлялись в (12). Вы-
борочно результаты вариантов (вариант 0 - номинальный) сведены в табл. 1
и 2, где выполнение условий теорем отмечено символами: “+” выполняется,
“-”
не выполняется.
В табл. 2 введены дополнительные обозначения функций:
a3 ((z - a1) (z - a4) - a2a3)
a3(z - a1)
(26)
q(z) =
,
p(z) = -
,
(z - a1) (z - aж) - a2a3
(z - a1)(z - aж) - a2a3
a3 (z - 1)((z - a1)(z - a4) - a2a3)
r(z) =
,
(z - 1) ((z - a1)(z - aж) - a2a3) - a2a3 (z - a1)
25
(z - 1) ((z - a1)(z - aж) - a2a3)
t(z) =
,
a2a3(z - a1)
a3 (z - 1)((z + a1)(z - a4) + a2a3)
f (z) =
,
(z - a1) ((z + 1)(z - aж) + a2a3)
(z - 1) ((z - a1)(z - aж) - a2a3)
s(z) =
a2a3(a1 - 1)
Для варианта 1 далее приводятся некоторые детали вычислений.
Таблица 1. Генерирование альтернативных конфигураций по теореме 1
Условия
Решение по формуле (15)
Конфигурация
№
существ.
Базовое
Вариация
(13), (14)
решение
столбцов
Cвх
Cвых
[
]
[
]
[
]
1
1
0
0
0
0
a
3
a4 - aж
0
+
+
0
0
1
0
0
0
b1
b1
[
]
[
]
[
]
0
1
0
0
0
0
a
3
a4 - aж
1
+
+
1
0
0
1
0
0
b2
b2
]
[
]
[
]
[ a3
a4 - aж
b2
1
0
1
0
0
0
0
2
+
+
b1
b1
-b1
[ µ1 µ2 ]
0
1
0
0
1
0
0
0
0
1
[
]
[
]
1
0
1
0
0
0
0
3
+
-
Нет решения
0
1
0
0
0
1
0
[
]
[
]
1
1
0
0
0
0
4
+
-
0
0
0
0
0
1
Таблица 2. Генерирование альтернативных конфигураций по теореме 2
Условия
Решение по формуле (23)
Конфигурация
№
существ.
Базовое
Вариация Вариация
Cвх
Cвых
(17)-(19)
решение
столбцов
строк
[
] [
]
[
]
1
1
0
0
0
0
q (z)
0
+ + +
0
ψ[ p(z)
1 ]
0
0
1
0
0
0
b1
[
] [
]
[
]
0
1
0
0
0
0
q (z)
1
+ + +
0
-
ψ[ p(z)
1 ]
1
0
0
1
0
0
b2
[
][
]
b2
b2
[
]
10
1
0
0
0
0
ψ1
-
-
2
+ + +
b1[ϑ1 ϑ2]
b1[ϑ1 ϑ2]
[ p(z) 1]
01
0
0
1
0
0
ψ2
1
1
[
][
]
r(z)
r(z)
b2
[
]
10
1
0
0
0
0
ψ1
3
+ + +
-
[ϑ1 ϑ2]
[ 1 t(z)]
b1
b1
b1
01
0
0
0
1
0
ψ2
0
0
1
[
] [
]
[
]
1
1
0
0
0
0
f (z) f (z)
4
+ + +
-
ψ[ 1
s(z) ]
0
0
0
0
0
1
b1
b1
26
Вычисления по теореме 1 (табл. 1). Предварительные расчеты:
0
BCвх = b2
,
BCвхR = 0,
0
[
]
[
]
1
0
0
1
BCL =
,
(BC)∼ =
0
0
,
0
0
1
b2
[
]
[
]
[
1
0
0
1
Cвых
D α
=
,
Cвых
D α
]L = 0,
0
1
0
0
1
0
(
[
])
Cвых
D α
∼ =01
.
0
0
0
0
Условие (13) выполняется:
1
0
0
1
[
]
0
0
a3
a4 - aж
0
1
0
0
1
0
0
0
0
0
b1 b2
b1
b1
0
1
0
0
= 0.
0
0
1
0
0
0
0
0
0
0
0
0
1
0
|
{z
}
|
{z
}|
{z
}
−1 0 1 0
BCвхL
B
Qном
|
{z
}
[
]
D α
Условие (14) также выполняется:
1
0
0
1
1
0
0
0
a3
a4 - aж
0
1
0
0
0
0
0
0
0
b1 b2
b1
b1
0
1
0
0
= 0.
0
1
0
0
0
0
0
0
0
0
0
1
0
−1
0
|
{z
}|
{z
}
−1 0 1 0
|
{z
}
B
Qном
|
{z
}
[
]R
]
Cвых
D α
[ D α
Решение по формуле (15) единственное:
]
[
]
0
0
[ a3
a4 - aж
1
0
0
0
(27) E(z) =
0
0
b1 b2
b1
b1
×
b2
0
0
0
0
0
0
0
|
{z
}
|
{z
}|
{z
}
(BCвх)∼
B
Qном
1
0
0
1
1
0
0
1
0
0
0
1
R
[
]L
×
0
1
0
0
+BCвх
µ+η Cвых
D α
=
0
0
| {z }
|
{z
}
0
0
1
0
0
0
0
0
−1 0 1 0
|
{z
}
|
{z
}
(
]
Cвых
[ D α])∼
[ D α
[
]
a3
a4 - aж
=
b2
b2
27
Вычисления подтверждают выполнение (16) у вариантов 1 и 2. Следователь-
но, конфигурация строки 1 в табл. 1 является допустимой. Проверка под-
тверждает совпадение Φрасс(z) и Φрасстреб(z). У вариантов 3 и 4 условие (14) не
выполняется, из чего следует, что конфигурации недопустимы.
Вычисления по теореме 2 (табл. 2). Предварительные расчеты:
1
0
[
]
βD =
0
1
0
,
βDR = 0 0
,
0
1
[
]
0
z-a1
0
(βD)∼ = 1
,ℵ(z)=
0
z-1
0
Фактор связности ℵ(z) обратим, и его оба делителя нуля равны нулю. Усло-
вие (17) выполняется, а вычисления по формуле (22) дают единственное зна-
чение
1
0
[
]
z-a1
a2
0
0
1
0
0
a3
−a1
1
ρ(z) =
z
a3
z-a4
0
=
1
0
0
1
z-aж
0
0
a2
z-1
0
| {z
}
|
{z
}
z-1
|
{z
}| {z }
|
{z
}
L
Φрасстреб(z)
BCвх
∼
(zIn−A)
(βD)
ℵ∼= ℵ-1
a2a
3
(z - a1)(z - aж)
=
a2a3
.
(z - 1)(z - aж)
Матрица δξ(z) имеет единственное значение
a2a
3
a2a3
(z - a1)(z - aж)
0
1
0
a3
(z - a1)(z - aж)
a3
δ(z) = 1
+ 0 0
=
a2a3
,
z-aж
z-aж
0
| {z
}
0
1
| {z }
расс
|
{z
}
(z - 1)(z - aж)
a2a3
Φ
(z)
треб
|
{z
}
(βD)∼
βDR
(z - 1)(z - aж)
ρ(z)
и, соответственно, матричное выражение, результаты повторной канонизации
которого используются в (20) и (23), принимает тоже единственное значение
a2a3
1
1
0
0
(z - a1)(z - aж)
[
]
0
0
1
0
a
1
0
0
0
0
3
0
-
0
1
0
=
0
0
1
0
0
z-aж
0
0
0
1
|
{z
}
a2a3
Cвых
0
−1 0 1
| {z }
|
{z
}
(z - 1)(z - aж)
α
D
|
{z
}
δ(z)
28
(z - a1)(z - aж) - a2a
3
(z - a1)(z - aж)
=
.
a3
-
z-aж
Канонизация этой матрицы дает:
[
]
(z - a1)(z - aж) - a2a3
Cвых (α - Dδξ(z))L =
1
,
a3(z - a1)
Cвых (α - Dδξ(z))R = 0,
[
]
(z - a1) (z - aж)
(Cвых (α - Dδξ(z)))∼ =
0
(z - a1) (z - aж) - a2a3
Условие (18) выполняется. Вычисления по формуле (23) в итоге дают мно-
жество решений
[
]
q(z)
[
]
(28)
{E(z)}ψ =
0
+ψ
p(z)
1
,
b2
|
{z
}
|
{z
}
Вариация
Базовое решение
строк
где функции q(z) и p(z) принимают значения (26), ψ - произвольное чис-
ло или выражение такие, что выполняется условие (19). Соответствующее
ограничение имеет вид неравенства
a2 (a3b1 - b2q(z)) - b1 (z - a1) (z - a4)
ψ(z) =
b1b2 ((z - a1) + a2p(z))
При любых других значениях этой функции условие (19) выполняется, и
конфигурация допустима. Вычисления показывают совпадение Φрасс(z) и
Φрасстреб(z) у вариантов 1-4.
Множество решений (28) содержит физически реализуемые и не реализуе-
мые элементы, что связано с выбором варьируемого параметра ψ.
Среди решений {E(z)}ψ присутствует и решение (27), полученное ранее
по теореме 1, в чем можно убедиться, используя в (28) значение параметра
a4 - aж
ψ=
b1
Пример подтверждает справедливость утверждений теорем 1 и 2, а табл. 1
и 2 демонстрируют более широкие возможности применения теоремы 2.
Методический пример4. Рассмотрим следующие матрицы
[
]
[
]
0
0
0
A=
,
B=D=β=I2, α=
0
0
1
4 Пример подсказан рецензентом статьи.
29
Таблица 3. Альтернативные конфигурации в методическом примере
Условия
Решение по формуле (23)
№
Конфигурация существ.
Базовое
Вариация
Вариация
Cвх
Cвых
(17)-(19) решение
столбцов
строк
[
]
[
]
[
]
[
]
1
0
1
0
-z
0
ψ1
0
+ + +
-
[ 1z ]
0
1
0
1
0
0
ψ2
[
]
[
]
[
]
[
]
[
]
1
0
1
0
-z
0
0
ψ1
1
+ + +
[ ϑ1 ϑ2 ]
[ 1z ]
0
0
0
1
0
0
1
ψ2
Значения E(z), не являющиеся решениями
[
]
[
]
[
]
[
]
[
]
1
0
1
0
-z
0
0
ψ1
2
+ + -
[ ϑ1 ϑ2 ]
[ 1z ]
0
0
0
0
0
0
1
ψ2
Пусть задана номинальная конфигурация
z3
z2
z3
z2
-
Qрассном(z) = I2
-z2 + 1 z2 + 1
I2
=
z2 + 1
z2 + 1
,
|{z}
|{z}
Cномвх
0
0
Cномвых
0
0
|
{z
}
Eном(z)
[
]T
Φрасстреб(z) =
z
0
Варианты трех конфигураций приведены в табл. 3, где вариант 0 соот-
ветствует номинальной конфигурации при выборе ψ1(z) = -zz2+1,ψ2=0.
Вариант 2 сформирован заведомо неработоспособным, поскольку в (12) для
него имеет место равенство Cвыхα = 0.
Применим теорему 2 для варианта 2. Условия (17), (18) выполнены:
[
]
[
]
0
ℵ(z) = BCвхL(zI2 - A) βDR
=
0
1
zI2
= 0,
|{z}
0
0
[
]
]
z
ℵ(z)
LBCвхL (zI2 - A) (βD)∼Φрасстреб(z) = 1[ 0
1
zI2I2
= 0,
0
δ(z) = (βD)∼Φрасстреб(z) = Φрасстреб(z),
[
]
-z
Cвых (α - Dδξ(z)) =
,
Cвых (α - Dδξ(z))R = 0.
0
Однако условие (19) не выполняется, в чем можно убедиться следующими
вычислениями:
[
]
[
]
1
(BCвх)∼L =
1
0
,
(BCвх)∼R =
,
0
[
[
]
][
]
1
1
0
(BCвх)∼ =
1
0
=
,
0
0
0
30
[
]
[
][
]
[
[
1
0
z
1
0
][
]
ψ1
][
]
{E(z)}
=
zI2
0
+
ϑ1
ϑ2
+
0
1
=
ϑ,ψ
0
0
0
-z
1
ψ2
[
]
-z ψ1
=
,
ϑ1
ϑ2 + ψ2
(
[
][
][
])
[
]
1
0
-z ψ1
1
0
0
0
det zI2 +
= det
= 0.
0
0
ϑ1
ϑ2 + ψ2
0
0
0
z
Таким образом, в конфигурации варианта 2 ни одно из вычисленных значе-
ний E(z) не может быть решением задачи из-за невыполнения условия (19).
8. Заключение
Применительно к избыточному комплексу оборудования, реализующему
управление по рассогласованию выходов системы, предложено аналитическое
решение задачи генерирования (тестирования и интеграции) альтернативных
конфигураций, обеспечивающих неизменность целевой функции его функ-
ционирования, зафиксированной в номинальной конфигурации. В отличие
от ранее решенной аналогичной задачи применительно к системе, подвер-
гающейся внешнему воздействию, вновь полученное решение является более
сложным, что выражено в существенно большем числе операций с полино-
миальными матрицами и двумя ярусами их варьирования.
Предлагаемый подход не ограничен исключительно областью линейных
систем. В сочетании с использованием различных приемов декомпозиции и
линеаризации он становится универсальным инструментом для структурных
решений в избыточных системах более широкого круга.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Очевидно, что равенство (12), содержа-
щее матричную дробь, будет справедливо, если одновременно выполняются
равенства для знаменателя и правого числителя:
(Π.1)
BCвхE(z)CвыхD = BQрассном(z)D, BCвхE(z)Cвыхα = BQрассном
(z)α.
В блочном форме этим равенствам соответствует запись
[
]
[
]
(Π.2)
BCвхE(z)Cвых
D α
= BQрассном (z)
D α
Уравнение (П.2) относительно неизвестной матрицы согласно теореме 1.6
из [20] разрешимо, если и только если выполнены условия (13) и (14), а его
решение согласно теореме 1.7 из [20] определяется формулой (15). Равен-
ство (12) имеет смысл, если и только если выполняется условие (16). Вместе
с тем, выполнение первого условия (П.1) гарантирует неизменность знаме-
нателя матричной дроби (12), а значит и существование таких варьируемых
параметров µ и η, при которых детерминантное условие (16) выполняется.
Теорема 1 доказана.
31
Доказательство теоремы 2. Вводя с учетом (11) замену
(Π.3)
δ(z) = (zIn - A + BQ(z)D)-1
BQ(z)α,
перепишем уравнение (12) в виде
(Π.4)
βDδ(z) = Φрасстреб
(z).
Это уравнение всегда разрешимо относительно матрицы δ(z), поскольку
условие существования решения
βDLΦрасстреб(z) = 0,
соответствующее теореме 1.4 из [20], при подстановке значения Φрасстреб(z) из (9)
становится тождеством:
βDLβD
(zIn - A + BQрассном(z)D)-1BQрассном(z)α = 0.
|
{z
}
0
Множество решений δ(z) уравнения (П.4) в соответствии с теоремой 1.4
из [20] записывается формулой (22), где ρ - некоторая матрица подходящих
размеров, возможные значения которой уточняются далее.
Теперь перепишем формулу (П.3) следующим образом:
BQ(z)(α - Dδ(z)) = (zIn - A)δ(z),
куда подставляем (11) и любой из элементов δξ(z) множества (21):
(Π.5)
BCE(z)C (α - Dδξ(z)) = (zIn - A)δξ
(z).
Одно из условий разрешимости двухстороннего матричного уравнения
(П.5) в соответствии с теоремой 1.7 из [20] записывается в виде равенства
BCвхL (zIn - A) δξ(z) = 0,
которое с учетом (21) и введением обозначения (20) перепишем в виде
(Π.6)
ℵ(z)ρ = -BCL (zIn - A) (βD)∼Φрасстреб
(z).
Выполнение этого условия явным образом зависит от выбора матрицы ρ, вве-
денной в (21). Решая (П.6) как левостороннее уравнение относительно ука-
занной матрицы, согласно теореме 1.4 [20] получаем условие разрешимости в
виде равенства (17) и решение в виде формулы (22).
Вторым условием разрешимости (П.5) в соответствии с теоремой 1.7 из [20]
является выполнение равенства (18) (обратимый сомножитель (zIn - A) сле-
ва опущен как не влияющий на результат проверки), а все множество реше-
ний описывается формулой (23).
Однако скрытое в формулах теоремы варьирование знаменателя матрич-
ной дроби (12) требует проверки его существования, т.е. существования таких
варьируемых параметров ξ, ϑ и ψ, при которых выполняется детерминантное
условие (19). Выполнение аналогичного условия для матрицы Qномс(z) связа-
но с существованием по определению номинальной конфигурации. Теорема 2
доказана.
32
СПИСОК ЛИТЕРАТУРЫ
1.
Агеев А.М., Бронников А.М., Буков В.Н., Гамаюнов И.Ф. Супервизорный метод
управления избыточностью технических систем // Изв. РАН. Теория и системы
управления. 2017. № 3. С. 59-69.
2.
Буков В.Н., Бронников А.М., Агеев А.М., Гамаюнов И.Ф., Озеров Е.В., Шур-
ман В.А. Концепция управляемой избыточности комплексов бортового оборудо-
вания // Науч. чтения по авиации, посвящ. пам. Н.Е. Жуковского: Матер. XVI
Всерос. науч.-практ. конф. / Гл. ред. С.П. Халютин (11-12 апр. 2019, Москва).
М.: Изд. дом Акад. им. Н.Е. Жуковского, 2019. С. 17-33.
3.
Amato F., Cosentino C., Mattei M., Paviglianiti G. A Direct/Functional Redun-
dancy Scheme for Fault Detection and Isolation on an Aircraft // Aerospace Sci.
Technol. 2006. V. 10. No. 4. P. 338-345.
4.
Bartys M., Patton R.J., Syfert M., Heras S., Quevedo J. Introduction to the
DAMADICS Actuator FDI Benchmark Study // Control Engineering Practice. 2006.
V. 14. No. 6. P. 577-596. Special Issue “Fault Diagnosis of Actuator Systems: the
DAMADICS Benchmark Problem”.
5.
Patton R.J., Uppal F.J., Simani S., Polle B. Reliable Fault Diagnosis Scheme for
a Spacecraft Attitude Control System // J. Risk Reliabil. 2008. V. 222. No. 2.
P. 139-152.
6.
Клюшников В.Ю. Повышение целевой эффективности наноспутников инфор-
мационного обеспечения // Изв. ВУЗов. Приборостроение. 2018. Т. 61. № 5.
С. 414-422.
7.
Gupta S. Dynamic Microcontroller Reconfiguration Delivers More Than
100%
=148343. (Дата обращения: 26.05.2020).
8.
Филиппов А.К. Современные архитектуры динамически реконфигурируемых
систем обработки информации // Проектирование и технология электронных
средств. 2007. № 2. С. 2-9.
9.
Потомский С.Ю., Полойко Н.А. Архитектура распределенной системы
управления на основе реконфигурируемой многоконвейерной вычислитель-
ной среды L-Net
// Системный администратор.
2014.
№ 10 (143). URL:
10.
Knyazeva N. Improving the Structural Survivability of the Telecommunications Net-
work // Inform. Models Anal. V. 2. 2013. No. 3. P. 275-284.
11.
Hagiyev C., Caliskan F. Fault Diagnosis and Reconfiguration in Flight Control Sys-
tems. Boston: Kluwer Acad. Publ., 2004.
12.
Grebeshkov A.Y., Zuev A.V., Kiporov D.S. Computer Simulation of Average Channel
Access Delay in Cognitive Radio Network // Commun. Computer Inform. Sci. 2016.
V. 678. P. 325-336.
13.
Дегтярев А.Р., Киселев С.К. Отказоустойчивые реконфигурирующиеся ком-
плексы интегрированной модульной авионики // Электротехнические и инфор-
мационные комплексы и системы. 2016. Т. 12. № 1. С. 89-99.
14.
Кулаков А.Ю., Павлов А.Н., Потрясаев С.А., Соколов Б.В. Методы, алгоритмы
и технологии реконфигурации бортовых систем маломассоразмерных космиче-
ских аппаратов // Известия высших учебных заведений. Приборостроение. 2018.
Т. 61. № 7. С. 596-603.
15.
Зыбин Е.Ю., Косьянчук В.В. Аналитический синтез многосвязных отказоустой-
чивых систем управления с упрощенной схемной реализацией // Изв. РАН. Тео-
рия и системы управления. 2010. № 1. С. 108-117.
33
16.
Агеев А.М. Конфигурирование избыточных комплексов бортового оборудова-
ния // Изв. РАН. Теория и системы управления. 2018. № 4. С. 175-192.
17.
Буков В.Н., Бронников А.М., Агеев А.М., Гамаюнов И.Ф. Аналитический под-
ход к формированию конфигураций технических систем // АиТ. 2017. № 9.
С. 67-83.
18.
Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. М.: Наука,
2002.
19.
Методы классической и современной теории автоматического управления. Учеб-
ник в 5 томах. Т. 1: Математические модели, динамические характеристики и
анализ систем автоматического управления / Под ред. К.А. Пупкова, Н.Д. Егу-
пова. М.: Изд-во МГТУ им. Н.Э. Баумана, 2004.
20.
Буков В.Н. Вложение систем. Аналитический подход к анализу и синтезу мат-
ричных систем. Калуга: Изд-во науч. литературы Н.Ф. Бочкаревой, 2006.
21.
Буков В.Н. Адаптивные прогнозирующие системы управления полетом. М.:
Наука, 1987.
22.
Кузовков Н.Т. Модальное управление и наблюдающие устройства. М.: Машино-
строение, 1976.
23.
Красовский А.А., Александров А.Г., Артемьев В.М. и др. Справочник по теории
автоматического управления / Под ред. А.А. Красовского. М.: Наука, 1987.
24.
Авиация ВВС России и научно-технический прогресс: боевые комплексы и си-
стемы вчера, сегодня, завтра / Под. ред. Е.А. Федосова. М.: Дрофа, 2005.
25.
Буков В.Н., Бронников А.М. Тестирование конфигураций избыточных интегри-
рованных комплексов оборудования // АиТ. 2019. № 2. С. 76-95.
26.
Буков В.Н., Бронников А.М., Агеев А.М., Гамаюнов И.Ф. Интеграция комплек-
са оборудования выбранной конфигурации // АиТ. 2019. № 4 С. 105-125.
27.
Буков В.Н., Бронников А.М, Агеев А.М., Гамаюнов И.Ф., Шурман В.А. Гене-
рация альтернативных связей последовательно соединенных подсистем в избы-
точном комплексе оборудования // Изв. РАН. Теория и системы управления.
2020. № 2. С. 53-65.
Статья представлена к публикации членом редколлегии П.С. Щербаковым.
Поступила в редакцию 27.02.2020
После доработки 22.06.2020
Принята к публикации 09.07.2020
34