Автоматика и телемеханика, № 2, 2021
© 2021 г. А.А. ПЕРЕГУДИН (peregudin@itmo.ru)
(Национальный исследовательский университет ИТМО;
Институт проблем машиноведения РАН, Санкт-Петербург)
МЕТОД ПРИТЯГИВАЮЩИХ ЦИЛИНДРОВ.
РЕШЕНИЕ ОБЩЕЙ ЛИНЕЙНОЙ ЗАДАЧИ СЛЕЖЕНИЯ1
Представлен метод притягивающих цилиндров обобщение метода ин-
вариантных эллипсоидов на случаи задач слежения и наблюдения. На
основе разработанного метода предложен алгоритм расчета параметров
регулятора, обеспечивающего ограниченность ошибки слежения или на-
блюдения в присутствии ограниченных внешних возмущений. Эффектив-
ность предложенного подхода продемонстрирована на примерах.
Ключевые слова: задача слежения, задача наблюдения, подавление воз-
мущений.
DOI: 10.31857/S0005231021020033
1. Введение
Задача подавления ограниченных внешних возмущений на основе метода
инвариантных эллипсоидов ранее рассматривалась в [1-3]. В частности, в [1]
решалась задача стабилизации возмущенной системы с измеряемым состоя-
нием с помощью статического регулятора; в [2] аналогичный подход при-
менялся для стабилизации возмущенной системы с измеряемым выходом
к статическому регулятору был добавлен динамический наблюдатель Люен-
бергера; в [3] аналогичная задача была решена с помощью динамического
регулятора общего вида. Однако во всех этих работах решалась только зада-
ча стабилизации объекта, но не задача слежения.
Распространению метода инвариантных эллипсоидов на задачу слежения
посвящены работы [4, 5], в которых на систему наложен ряд дополнительных
условий. Так, в [4] предполагается, что все компоненты задающего воздей-
ствия измеряемы и могут быть использованы регулятором, а в [5] дополни-
тельно предполагается, что их производные также измеряемы и ограничены.
Отметим, что в обеих работах состояние объекта является измеряемым, а ис-
пользуемый регулятор статическим. В этом смысле работы [4, 5] обобща-
ют [1], но не более поздние [2, 3], в которых уже используется динамический
регулятор при неизмеряемом состоянии объекта.
Целью настоящей работы является обобщение метода инвариантных эл-
липсоидов на случай задачи слежения при использовании динамического ре-
гулятора по выходу. В качестве инструмента используется новый метод, ос-
1 Результаты разделов 3 и 4 получены при поддержке гранта Российского научного
фонда (проект № 18-79-10104) в ИПМаш РАН. Результаты разделов 5 и 6 получены при
поддержке гранта Президента Российской Федерации (грант № МД-1054.2020.8).
35
нованный на притягивающих множествах более общего вида, в том числе
неограниченных по части переменных.
В работе использованы следующие обозначения: Sn = {A ∈ Rn×n | AT = A},
если A ∈ Rm×n, то rangeA = {Ax ∈ Rm | x ∈ Rn}, kerA = {x ∈ Rn | Ax = 0},
A+ псевдообратная Мура-Пенроуза (существует у любой матрицы вне за-
висимости от полноты ранга).
2. Мотивирующий пример
В качестве мотивирующего примера рассмотрим неустойчивую систему,
состояющую из объекта первого порядка и наблюдателя первого порядка,
заданную как
{
x(t) = ax(t) + bf(t),
(1)
x(t) = (a - l)x(t) + lx(t),
где x(t) ∈ R - состояние объекта, x(t) ∈ R - состояние наблюдателя, f(t) ∈ R -
внешнее возмущение, |f(t)| ≤ 1, b > 0 и l > a > 0. В качестве выходной пере-
менной объединенной системы (1) рассмотрим ошибку наблюдения
y(t) = x(t) - x(t).
Представленная система неустойчива и не имеет притягивающего эллипсоида
по состоянию. Однако в силу того, что выход y(t) имеет устойчивую динамику
y(t) = (a - l)y(t) + bf(t),
у системы существуют притягивающие эллипсоиды по выходу. Минимальный
притягивающий эллипсоид по выходу (в данном случае - отрезок минималь-
ной длины) может быть найден аналитически как
{
}
b2
(2)
y∈R
y2 ≤
,
(a - l)2
однако в пространстве состояний ему соответствует неограниченное множе-
ство
{
}
b
(3)
(x, x) ∈ R2
|x - x| ≤
,
l-a
не являющееся эллипсоидом. Метод инвариантных эллипсоидов [1] не может
быть непосредственно применен для поиска притягивающего множества (2),
потому как у системы (1) не существует инвариантного эллипсоида по состоя-
нию. Существует, однако, притягивающее подмножество пространства со-
стояний системы в форме полосы (3). Траектория попадает в эту полосу и
затем движется в ней, неограниченно удаляясь от начала координат. Рису-
нок 1 иллюстрирует описанную ситуацию.
Данный пример показывает, что для решения задачи слежения или наблю-
дения в общем случае недостаточно метода инвариантных (притягивающих)
эллипсоидов, разработанного в [1-3] для решения задач стабилизации. Для
обобщения существующего метода на случаи, подобные представленному вы-
ше, в настоящей работе развивается метод притягивающих цилиндров.
36
^
x
Рис. 1. Пример траектории системы. Серым цветом выделено неограниченное
притягивающее подмножество пространства состояний.
3. Геометрические основы метода притягивающих цилиндров
Для описания рассматриваемых в настоящей работе притягивающих под-
множеств введем следующее определение.
Определение 1. Подмножество пространства Rn, заданное как
{
}
(4)
x∈Rn
xTQx ≤ 1
,
где Q ∈ Sn, Q ≽ 0 и rankQ = k, называется (k, n)-цилиндром.
Прим{ры (k, n)-цлиндро} п{иведены на рис. 2-4. Им соотв}тс{вуют мно-
жества
(x, y) ∈ R2
x2 ≤ 1
,
(x, y, z) ∈ R3
x2 + (y - z)2 ≤ 1
,
(x, y, z) ∈
}
∈R3
z2 ≤1
, каждое из которых можно задать в виде (4), выбрав соответ-
ствующую матрицу Q.
Замечание 1. Отметим, что при k = n множество (4) является эллип-
соидом и что в [1-3] авторами рассматривались притягивающие подмноже-
Рис. 2.
Рис. 3.
Рис. 4.
Рис. 2. Бесконечная полоса - пример (1, 2)-цилиндра.
Рис. 3. Бесконечный цилиндр - пример (2, 3)-цилиндра.
Рис. 4. Слой пространства между двумя плоскостями - пример (1, 3)-цилиндра.
37
ства именно такого вида. При k < n множество (4) эллипсоидом уже не яв-
ляется, но при этом также может являться притягивающим подмножеством
пространства состояний некоторой системы. В этом смысле метод притягива-
ющих цилиндров является обобщением метода инвариантных (притягиваю-
щих) эллипсоидов.
Сформулируем геометрическое описание (k, n)-цилиндров.
Утверждение 1. Как множество в линейном пространстве (k,n)-ци-
линдр (4) является суммой k-мерного эллипсоида, лежащего в подпростран-
стве rangeQ, и всего подпространства kerQ.
Следствие 1. Как топологическое пространство (k,n)-цилиндр гомео-
морфен прямому произведению замкнутого k-мерного шара и Rn-k.
Доказательства утверждения 1 и следствия 1 приведены в Приложении.
Известно, что образом эллипсоида при линейном отображении является
эллипсоид. Обобщим это утверждение на случай (k, n)-цилиндров.
Утверждение 2. Пусть C ∈ Rm×n, rankC = m. Образом (k,n)-цилинд-
ра (4) при отображении y = Cx является (r, m)-цилиндр
{
}
(
)
y∈Rm
yTRy ≤ 1 , R = C+TM
I - (MN)(MN)+
MC+,
где r = rankR, M = Q1/2, N = I - C+C.
Следствие 2. При n ≥ 2 проекцией (k,n)-цилиндра на произвольную
плоскость является либо вся плоскость, либо полоса (часть плоскости
между двумя параллельными прямыми), либо эллипс (часть плоскости,
ограниченная эллипсом).
Доказательства утверждения 2 и следствия 2 приведены в Приложении.
Изложенные выше утверждения дают читателю базовые представления
о геометрии рассматриваемых в настоящей работе притягивающих подмно-
жеств.
4. Анализ. Метод притягивающих цилиндров
Рассмотрим линейную динамическую систему
(5)
x(t) = Ax(t) + Bf(t),
где x(t) ∈ Rn - вектор состояния, f(t) ∈ Rm - внешнее возмущение, A, B -
вещественные матрицы соответствующих размерностей. Предполагается, что
внешнее возмущение ограничено и что известна матрица G ≻ 0 такая, что
(6)
fT(t)Gf(t) ≤ 1,
∀t ≥ 0.
Определение 2. Притягивающим (k,n)-цилиндром системы (5)-(6)
называется множество (4) такое, что для всех траекторий системы вы-
полнено
lim sup xT(t)Qx(t) ≤ 1,
t→+∞
а также, если x(t0) ∈ (4), то x(t) ∈ (4) при всех t ≥ t0.
38
Согласно определению 2, притягивающие (k, n)-цилиндры являются одно-
временно притягивающими и инвариантными подмножествами пространства
состояний.
Сформулируем достаточное условие существования притягивающего ци-
линдра в пространстве состояний системы (5)-(6).
Теорема 1. Если матрица C ∈ Rk×n такова, что
rankC = k, CA(I - C+C) = 0,
и если существуют P ≻ 0 и α > 0 такие, что
[
]
PCAC+ + (CAC+)TP + αP PCB
≺ 0,
(CB)TP
-αG
то подмножество {x ∈ Rn | xTCTPCx ≤ 1} пространства состояний си-
стемы (5)-(6) является притягивающим (k,n)-цилиндром.
Доказательство теоремы 1 приведено в Приложении.
Замечание 2. Отметим, что в частном случае, при C = I ∈ Rn×n, тео-
рема 1 совпадает с основным результатом работы [1], и тогда притягивающий
(k, n)-цилиндр является инвариантным эллипсоидом.
5. Синтез. Общая линейная задача слежения
5.1. Постановка задачи
Рассмотрим объект управления
{ ˙x(t) = A1x(t) + B1u(t) + C1w(t),
(7)
y(t) = D1x(t) + E1u(t) + F1w(t),
где x(t) ∈ Ra1 - неизмеряемый вектор состояния, u(t) ∈ Rb1 - управление,
w(t) ∈ Rc1 - неизмеряемый вектор возмущений, y(t) ∈ Rb2 - измеряемый вы-
ход, A1, B1, C1, D1, E1, F1 - известные вещественные матрицы соответствую-
щих размерностей.
Пусть эталонная модель задана как
{ ˙xr(t) = A2xr(t) + C2h(t),
(8)
g(t) = D2xr(t),
где xr(t) ∈ Ra2 - неизмеряемый вектор состояния, h(t) ∈ Rc2 - неизмеряемое
задающее воздействие, g(t) ∈ Rc1 - измеряемый эталонный выход, A2, C2,
D2 - известные вещественные матрицы соответствующих размерностей.
Замечание 3. Формально, эталонную модель можно не выделять в от-
дельную систему, а сделать частью уравнения (7), объединив вектор x(t) с
вектором xr(t), w(t) с h(t) и y(t) с g(t). Однако в настоящей работе предла-
гается рассмотреть (7) и (8) как две различные модели. Такое разделение не
является обязательным, но помогает лучше понять смысл целевой перемен-
ной z, раскрываемый далее.
39
Для достижения цели управления предполагается использование регуля-
тора заданного динамического порядка a3 ∈ N ∪ {0} вида
{
x
˙
c(t) = A3xc(t) + B3y(t) + C3g(t),
(9)
u(t) = D3xc(t) + E3y(t) + F3g(t),
где xc(t) ∈ Ra3 - вектор состояния регулятора, A3, B3, C3, D3, E3, F3 - веще-
ственные матрицы соответствующих размерностей, подлежащие выбору.
Замечание 4. При a3 = 0 матрицы A3,B3,C3,D3 пустые, регулятор (9)
является статическим и описывается формулой u(t) = E3y(t) + F3g(t). По-
скольку современные компьютерные программы (например, matlab) свобод-
но работают с пустыми матрицами различных размерностей, далее не будем
рассматривать этот случай отдельно, считая его частью общей теории.
Предполагается, что внешние сигналы w(t), h(t) ограничены и что извест-
на матрица G ≻ 0 такая, что
[w(t)]T
[w(t)]
(10)
G
≤ 1,
∀t ≥ 0.
h(t)
h(t)
Замечание 5. Консервативность основного результата, который будет
изложен в разделе 5.2, может быть несколько снижена путем замены (10)
на пару ограничений w(t)TG1w(t) ≤ 1, h(t)TG2h(t) ≤ 1, где G1, G2 ≻ 0, или
даже на большее число ограничений, наложенных на отдельные компонен-
ты данных векторов. Однако это приведет к увеличению числа свободных
переменных и усложнению формулировок, не обязательному для настоящей
статьи.
Цель управления формулируется следующим образом: при w(t), h(t) ≡ 0
обеспечить асимптотическую сходимость целевой переменной
(11)
z(t) = K1x(t) + K2xr(t) + K3xc
(t)
к нулю. Если же w(t), h(t) ≡ 0, но выполнено условие (10), то перемен-
ная (11) должна асимптотически сходиться к ограниченному множеству ви-
да {z ∈ Rk | zTP z ≤ 1} и должна быть найдена соответствующая матрица
P ≻ 0. Предполагается, что матрицы K1 ∈ Rk×a1, K2 ∈ Rk×a2, K3 ∈ Rk×a3, за-
]
дающие цель управления, известны и что rank
[K1 K2
K3
= k. Последнее
условие наложено для удобства и не является огранич[тельным, та]к как его
выполнения всегда можно добиться, убрав из матрицы
K1
K2
K3
линейно
зависимые строки.
Сформулированная таким образом задача в рамках настоящей статьи на-
зывается общей линейной задачей слежения. Отметим несколько частных
случаев:
1. Задача стабилизации. Если K1 = I, K2 = K3 = 0, то при отсутствии
внешних воздействий цель управления принимает вид ∥x(t)∥ → 0. В [3] пока-
зано, что такая задача может быть решена с помощью метода инвариантных
эллипсоидов.
40
2. Задача слежения. Если K1 = I, K2 = -I, K3 = 0, то при отсутствии
внешних воздействий цель управления имеет вид ∥x(t) - xr(t)∥ → 0, что со-
ответствует слежению вектора состояния объекта за вектором состояния эта-
лонной модели.
3. Задача наблюдения. Если K1 = I, K2 = 0, K3 = -I, то регулятор (9)
превращается в наблюдатель, вектор состояния которого должен сходиться к
вектору состояния объекта. Если внешние воздействия отсутствуют, то такая
цель управления может быть сформулирована как ∥xc(t) - x(t)∥ → 0.
Если матрицы Ki выбраны иным образом, то цель управления представ-
ляет собой некоторое сочетание задач стабилизации, слежения и наблюдения
(возможно, по части переменных). Таким образом, поставленная задача син-
теза может быть интерпретирована как одна из этих трех базовых задач,
либо как их комбинация.
Отметим, что на матрицы A1, B1, C1, D1, F1, A2, C2, D2 в (7) и (8) не на-
кладывается никаких ограничений. Однако требуется наложить ограничение
на матрицу E1, связанное с корректностью рассматриваемой обратной свя-
зи. Рассмотрим вспомогательный измеряемый выход y(t) = y(t) - E1u(t) =
= D1x(t) + F1w(t) системы (7), который получается из выражения для y(t),
если убрать слагаемое с E1. Предположим, что поставленная задача мо-
жет быть решена с помощью регулятора (9), в котором вместо выхода y(t)
используется вспомогательный выход y(t). Тогда после подстановки y(t) =
= y(t) - E1u(t) получим закон управления в виде
u(t) = (I + E1E3)-1(D3xc(t) + E3y(t) + F3g(t)) =D3xc(t)
E3y(t)
F3g(t),
для реализации которого необходимо, чтобы матрица (I + E1E3)-1 существо-
вала. Именно это условие и накладывается дополнительно. С учетом ука-
занного свойства при формулировке основного результата достаточно огра-
ничиться случаем E1 = 0, что и будет сделано, при этом соответствующий
регулятор для общего случая всегда может быть восстановлен.
5.2. Основной результат
Введем вспомогательные обозначения для описания замкнутой системы
A1
0
0
0
B1
C1
0
0
0
I
A=
0
A2
0, B=
0
0
, C =
0
C2, D=
D1
0
0,
0
0
0
I
0
0
0
0
D2
0
0
0
]
x(t)
[A3 B3
C3
[w(t)]
F =
F1
0, X =
,
s(t) =
xr(t), f(t) =
,
D3
E3
F3
h(t)
0
0
xc(t)
]
M =A+BXD, N =C+BXF, K =
[K1 K2
K3
,
n=a1 +a2 +a3.
Тогда уравнение замкнутой системы (7)-(9), (11) может быть записано как
{
s(t) = Ms(t) + Nf(t),
(12)
z(t) = Ks(t),
41
при этом ограничение (10) примет вид
(13)
fT(t)Gf(t) ≤ 1,
∀t ≥ 0.
Перед формулировкой основного результата введем обозначения
H1 = KAK+ + KB(KB)+KA(D(K+K - I))+DK+,
H2 = KC + KB(KB)+KA(D(K+K - I))+F,
(14)
H3 = KB, H4 = DK+ + D(D(K+K - I))+DK+,
H5 = F + D(D(K+K - I))+F.
Сформулируем основной результат в виде теоремы.
Теорема 2. Если матрицы A,B,D,K таковы, что
(15)
KB(KB)+KA(D(I - K+K))+D(I - K+K) = KA(I - K+
K),
и если существуют P,Q ≻ 0, µ1,µ2 ∈ R, α > 0 такие, что PQ = I и
[
]
]
H1Q + QHT1 + αQ H2
[H3HT3
0
≺µ1
,
HT2
-αG
0
0
(16)
[
]
[
]
PH1 + HT1 P + αP PH2
HT4H4
HT4H5
≺µ2
,
HT2P
-αG
HT5H4
HT5H5
то существует набор X параметров регулятора (9) такой, что подмноже-
ство {s ∈ Rn | sTKTPKs ≤ 1} пространства состояний замкнутой систе-
мы (12) является притягивающим (k,n)-цилиндром.
При фиксированных α, P соответствующая матрица X находится как
(17)
X = (KB)+KA(D(K+K - I))+ + Y + (KB)+KBY D(D(K+K - I))+,
где Y - любое решение линейного матричного неравенства
[
]
[
]
PH1+HT1 P +αP PH2
PH3Y H4 +(PH3Y H4)T PH3Y H5
(18)
+
≺ 0.
HT2P
-αG
(P H3Y H5)T
0
Доказательство теоремы 2 приведено в Приложении. Из доказательства,
в частности, следует, что при выполнении условий теоремы матричное нера-
венство (18) всегда имеет решение.
Условие (15) является вполне естественным: оно показывает, как должны
соотноситься между собой параметры объекта (7) и эталонной модели (8),
чтобы решение соответствующей задачи слежения было возможны[. Мож]
но показать, что для задач стабилизации и наблюдения, при K =
I
0
0
]
и K =
[I
0
-I
соответственно, условие (15) всегда выполнено независи-
]
мо от параметров объекта и эталонной модели. Если же K =
[I -I
0
, что
соответствует задаче слежения, то условие (15) представляется в виде
B1B+1(A1 - A2)(DT1D1 + DT2D2)+(DT1D1 + DT2D2) = (A1 - A2).
42
Следует отметить, что выполнение этого условия еще не означает возмож-
ность построения соответствующего регулятора, ведь помимо него должно
быть также выполнено второе условие теоремы 2, связанное с неравенства-
ми (16).
5.3. Вычислительные аспекты
Поскольку на матрицы P и Q, входящие в формулировку теоремы 2, на-
ложено дополнительное ограничение P Q = I, матричные неравенства (16)
не являются линейными даже при фиксированном α и не могут быть непо-
средственно решены с помощью стандартных программных средств, таких
как yalmip или cvx. Однако существует эффективный алгоритм решения
матричных неравенств именно с таким типом нелинейности, который в ли-
тературе можно встретить под названием “Cone complementarity algorithm”
(алгоритм восполнения конуса) [6-9].
Алгоритм 1.
1. Задать i = 0. Зафиксировать параметр α > 0 и найти положительно опре-
деленное решение
P,Q) системы линейных матричных неравенств (16).
2. Положить (Ri, Si) =
P,Q).
3. Найти положительно определенное решение
P,Q) задачи минимизации:
минимизировать trace(P Si + QRi)
[
]
P I
при условиях
≽ 0, (16).
I Q
4. Если выполнено условие остановки (например, величина trace
PSi+QRi)
достаточно близка к 2k или величина i достигла предельного значения), пе-
рейти к шагу 5. Иначе увеличить i на единицу и перейти к шагу 2.
5. Принять полученную пару
P,Q) в качестве пары (P,Q), приближенно
удовлетворяющей условиям теоремы 2. Закончить.
В [6] показано, что алгоритм
1
сходится к паре (P, Q), удовлетво-
ряющей условиям
(16) и доставляющей локальный минимум величине
trace(P Q + QP ). Несмотря на то, что в общем случае выполнение условия
PQ = I не гарантировано, алгоритм широко применяется [6-9] для решения
задач теории управления, в которых возникают подобные матричные нера-
венства.
Применение теоремы 2 на практике во всей полноте предполагает выпол-
нение следующей последовательности действий:
1. Проверить, что для поставленной задачи выполнено условие (15).
2. Применив алгоритм 1, найти взаимообратные P и Q, удовлетворяю-
щие (16).
3. Используя найденную матрицу Q, найти матрицу Y , удовлетворяю-
щую (18).
4. Вычислить матрицу X параметров регулятора по формуле (17).
43
Однако следует отметить, что нахождение пары взаимообратных матриц
(P, Q) не является обязательным для синтеза регулятора. Если в процессе вы-
полнения алгоритма 1 найдена матрица P такая, что неравенство (18) имеет
решение Y , то нет необходимости далее выполнять алгоритм можно сразу
перейти к вычислению параметров регулятора по формуле (17).
6. Примеры
6.1. Задача слежения
Рассмотрим объект управления (7) с матрицами
]
[-2,99 3,10
[1,5]
[0,15]
A1 =
,
B1 =
,
C1 =
,
-2,10
2,01
1
0,15
]
D1 =
[1
-1
,
E1 =
[0], F1 =
0
и эталонную модель (8) с матрицами
]
[ 0,01 0,1
]
A2 =
,
C2 =
[0], D2 =[1
-1
-0,1
0,01
Заметим, что объект управления является устойчивым, а эталонная модель,
напротив, неустойчива. Условие (10) предполагается выполненным при G =
= 1.
Пусть динамический порядок a3 регулятора (9) положен равным 1, а це-
левая переменная (11) задана как
z(t) = x(t) - xr(t),
что соответствует задаче слежения и выбору матрицы
]
[1
0
-1
0
0
K =
0
1
0
-1 0
Нетрудно проверить, что в этом случае условие (15) выполнено. Тогда в ре-
зультате выполнения алгоритма 1 при α = 0,5 может быть найдена матрица
[
]
1485
-1585
P =
≻0
−1585
1698
и затем по формулам (18), (17) восстановлены параметры
]
]
[A
3
B3
C3
[0
0
0
X =
=
D3
E3
F3
0
-2,95
4,95
регулятора (9), который, несмотря на заданный динамический порядок
a3 = 1, оказывается статическим.
44
5
Граница притягивающего цилиндра
4
Траектория системы
3
2
1
0
-1
-2
-3
-4
-5
-4
-3
-2
-1
0
1
2
3
4
5
x1
Рис. 5. Проекция притягивающего (k, n)-цилиндра и траектории замкнутой
системы.
5
4
3
2
1
0
-1
-2
-3
-4
-4
-3
-2
-1
0
1
2
3
4
x1
Рис. 6. Траектория объекта (
), траектория эталонной модели (- -) и границы
допустимого коридора (. . . ).
При моделировании внешнее возмущение было задано как w(t) = sin(0,4t),
]T
]T
а начальные условия положены равными x(0) =
[0
0
и xr(0) =
[1
1
Результаты моделирования представлены на рис. 5, 6. На рис. 5 показана
проекция траектории замкнутой системы: по оси абсцисс отложено значение
первой координаты вектора состояния объекта, а по оси ординат значение
первой координаты вектора состояния эталонной модели. Также показаны
границы полосы, являющейся проекцией притягивающего (k, n)-цилиндра на
эту плоскость.
45
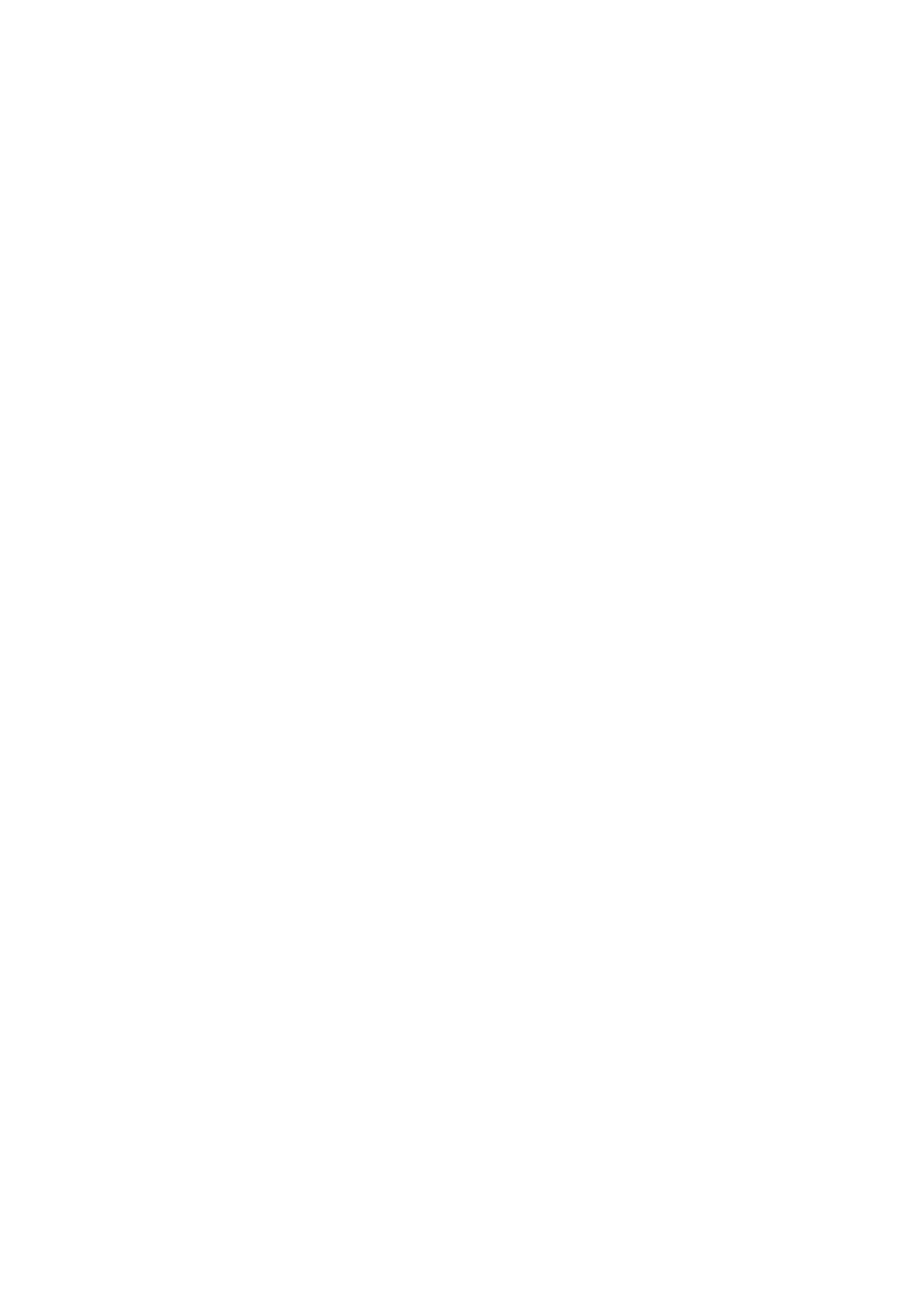
На рис. 6 показаны траектория x(t) объекта и траектория xr(t) эталон-
ной модели. На рисунке также отмечены границы “допустимого коридора”,
имеющего следующий смысл: если в данный момент времени каждая из про-
екций траектории замкнутой системы - на плоскость (x1, xr1) (см. рис. 5) и
на плоскость (x2, xr2) (не приводится, так как выглядит аналогично) на-
ходится внутри соответствующей проекции притягивающего (k, n)-цилиндра,
то траектория x(t) в данный момент времени находится в границах допусти-
мого коридора. Иными словами, тот факт, что траектория объекта, начиная
с какого-то момента, не выходит за границы точечного пунктира, являет-
ся иллюстрацией того, что траектория замкнутой системы попадает внутрь
(k, n)-цилиндра и не покидает его.
6.2. Задача наблюдения
Рассмотрим объект (7) с матрицами
0,168
-0,132
-0,052
0
0
A1 =0,148
-0,152
0,028,B1 = 0,C1 = 0,
0,204
-0,196
-0,006
0
0
]
D1 =
[-0,2 0,8
-0,2
,
E1 =
[0], F1 =[0,02].
Отметим, что объект является неустойчивым. В этом примере эталонная мо-
дель не рассматривается, т.е. все матрицы в (8) пустые. Условие (10) предпо-
лагается выполненным при G = 1.
Пусть динамический порядок a3 регулятора (9) положен равным 3, а це-
левая переменная (11) задана как
z(t) = x(t) - xc(t),
что соответствует задаче наблюдения и выбору матрицы
1
0
0
-1
0
0
K =0 1 0
0
-1
0.
0
0
1
0
0
-1
Нетрудно проверить, что в этом случае условие (15) выполнено. Тогда в ре-
зультате выполнения алгоритма 1 при α = 0,3 может быть найдена матрица
192
-624
222
P =-624
2051
-732≻0
222
-732
289
и затем по формулам (18), (17) восстановлены параметры
3,970
-15,341
3,750
19,011
A3 =1,506
-5,585
1,386,B3 = 6,792
0,559
-1,618
0,349
1,777
регулятора (9), который в этой задаче выполняет роль наблюдателя.
46
8
Граница притягивающего цилиндра
7
Траектория системы
6
5
4
3
2
1
0
-1
0
1
2
3
4
5
6
7
8
x2
Рис. 7. Проекция притягивающего (k, n)-цилиндра и траектории замкнутой
системы.
14
12
10
8
6
4
2
0
-2
0
5
10
15
20
25
x2
Рис. 8. Траектория объекта (
), траектория эталонной модели (- -) и границы
допустимого коридора (. . . ).
Можно заметить, что для полученных матриц выполнено A3 = A1 - B3D1,
а значит, структура системы (9) совпадает со структурой наблюдателя Лю-
енбергера
x
˙
c(t) = A1xc(t) + B3(y(t) - D1xc(t)).
Примечательно, что такая структура не была создана искусственно, а полу-
чилась сама собой в результате выполнения алгоритма 1.
47
При моделировании внешняя помеха была задана как w(t) =12 +
]T
+12sgn(sin(0,1t)), а начальные условия положены равными x(0) =
[3,2
3
3
]T
и xc(0) =
[-10
0
4
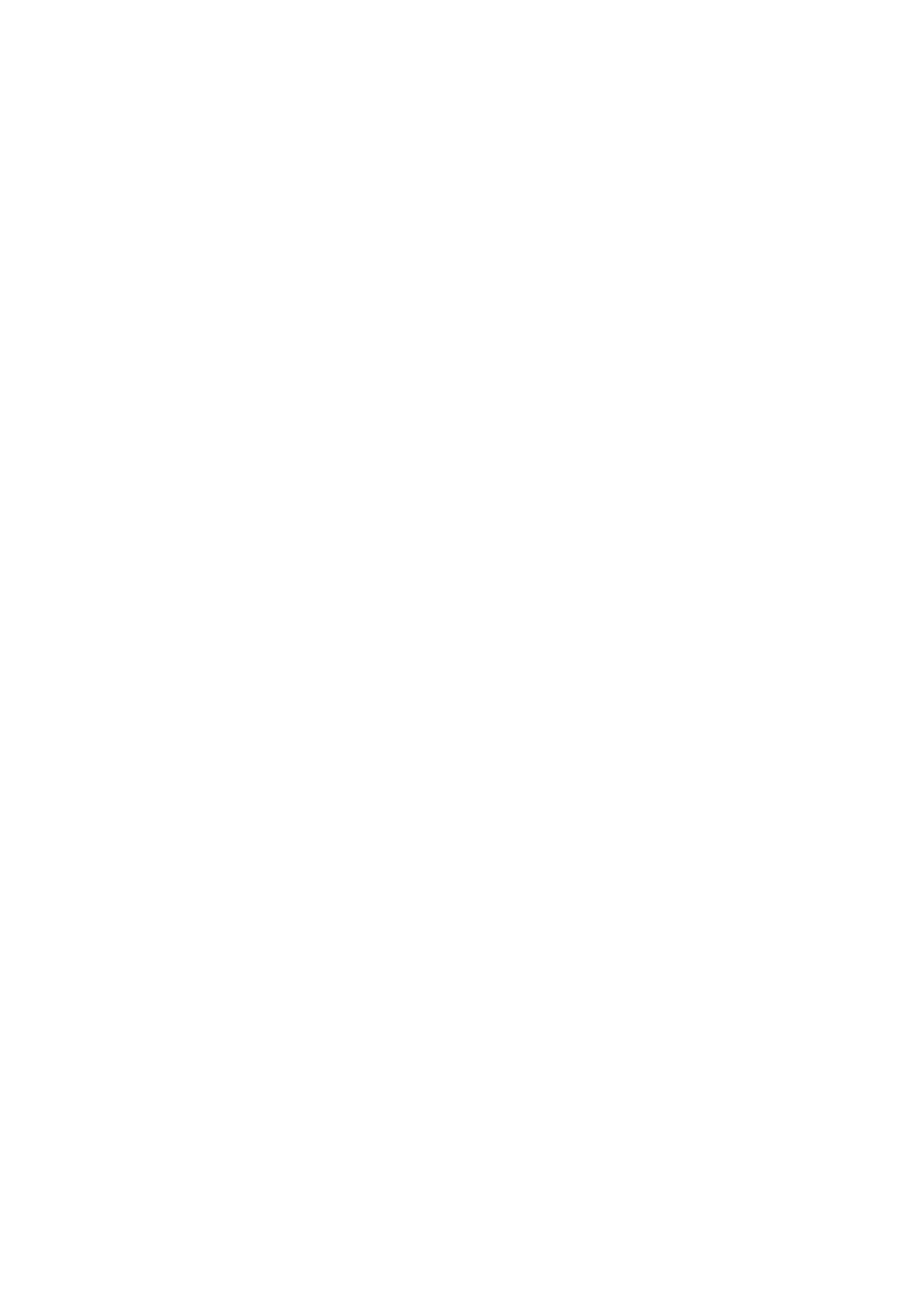
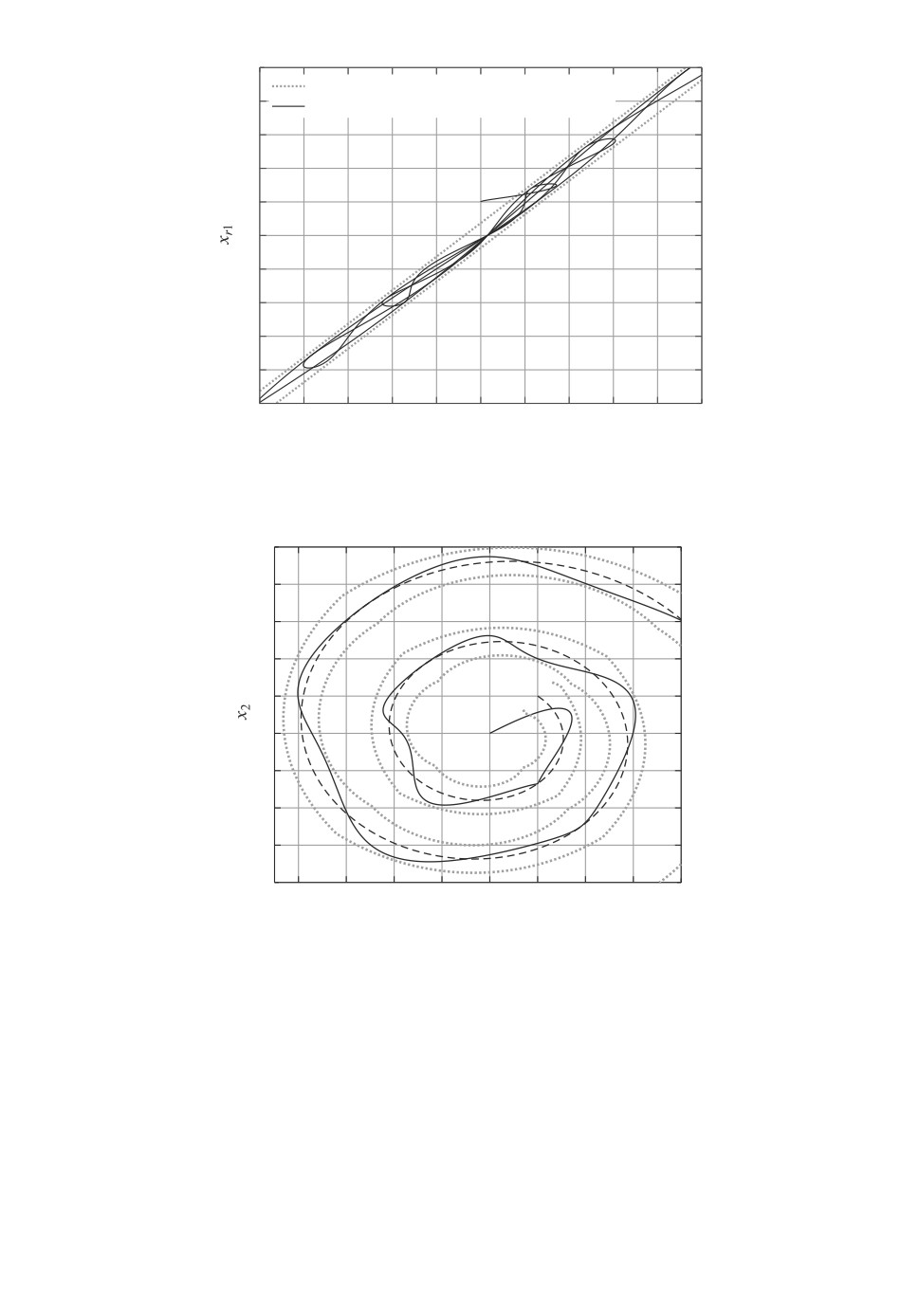
Результаты моделирования представлены на рис. 7 и 8. На рис. 7 показа-
на проекция траектории замкнутой системы: по оси абсцисс отложено зна-
чение второй координаты вектора состояния объекта, а по оси ординат
значение второй координаты вектора состояния регулятора (наблюдателя).
Также показаны границы полосы, являющейся проекцией притягивающего
(k, n)-цилиндра на эту плоскость.
На рис. 8 показаны траектория x(t) объекта и траектория xc(t) регулятора
(наблюдателя). На рисунке также отмечены границы “допустимого коридо-
ра”, имеющего следующий смысл: если в данный момент времени каждая из
проекций траектории замкнутой системы на плоскость (x2, xc2) (см. рис. 7)
и на плоскость (x3, xc3) (не приводится, так как выглядит аналогично) на-
ходится внутри соответствующей проекции притягивающего (k, n)-цилиндра,
то траектория x(t) в данный момент времени находится в границах допу-
стимого коридора. Иными словами, тот факт, что траектория наблюдателя
начиная с какого-то момента не выходит за границы точечного пунктира,
является иллюстрацией того, что траектория замкнутой системы попадает
внутрь (k, n)-цилиндра и не покидает его.
7. Заключение
В работе предложено обобщение метода инвариантных эллипсоидов, поз-
воляющее находить притягивающие подмножества пространства состояний
более общего вида. Показано, что предложенный метод может быть исполь-
зован для решения задач стабилизации, слежения и наблюдения, а также их
комбинаций. Предложен алгоритм, позволяющий применять основой резуль-
тат на практике с помощью стандартных программных средств. На числен-
ных примерах продемонстрирована эффективность предложенного подхода.
Автор выражает благодарность Игорю Борисовичу Фуртату и анонимному
рецензенту за ценные замечания, позволившие улучшить форму и содержа-
ние статьи.
ПРИЛОЖЕНИЕ
Доказательство утверждения 1. Матрица Q симметричная, по-
этому пространство Rn можно представить как прямую сумму ее образа и
ядра:
Rn = rangeQ ⊕ kerQ.
Иными словами, для любого x ∈ Rn существует единственное разложение
x = xr + xk, xr ∈ rangeQ, xk ∈ kerQ.
Тогда (k, n)-цилиндр (4) можно представить как
{
}
{
}
x ∈ Rn | xTQx ≤ 1
= (xr + xk) ∈ Rn | (xr + xk)TQ(xr + xk) ≤ 1
=
{
}
{
}
= (xr + xk) ∈ Rn | xTrQxr ≤ 1
= xr ∈ rangeQ | xTr Qxr ≤ 1
+ kerQ.
48
Сужение оператора Q на подпространство rangeQ имеет полный ранг. Сле-
довательно, множество {xr ∈ rangeQ | xTrQxr ≤ 1} является k-мерным эллип-
соидом.
Доказательство следствия 1. Символом= обозначим гомеоморфность.
Из того что rangeQ= Rk, kerQ= Rn-k, а множества {xr ∈ rangeQ | xTrQxr ≤ 1}
и kerQ ортогональны друг другу, следует, что
{
}
{
}
xr ∈ rangeQ | xTrQxr ≤ 1
+ kerQ
= x∈Rk |xTx≤1 ×Rn-k.
Лемма 1
[10]. Если матрицы A, U, C, V таковы, что обе части равен-
ства
(A + UCV )-1 = A-1 - A-1U(C-1 + V A-1U)-1V A-1
имеют смысл (все операции определены), то указанное равенство выполне-
но.
Лемма 2
[11]. Для произвольной матрицы A ∈ Rm×n верно, что
lim (ATA + εI)-1AT = A+.
ε→0+
Указанное равенство выполнено даже в тех случаях, когда (ATA)-1 не су-
ществует.
Доказательство утверждения 2. Воспользуемся полнотой строч-
ного ранга матрицы C и рассмотрим семейство матриц Rε с параметром ε,
определенных как
(
)-1
Rε = C(Q + εI)-1CT
,
ε > 0.
Известно (см. [1]), что если Q ≻ 0, то R = (CQ-1CT)-1. При Q ≽ 0 в силу
непрерывности отображения x → Cx имеем R = limε→0+ Rε. Cогласно лем-
ме 1
(
)-1
1
1
1
1
(Q + εI)-1 = (εI + MM)-1 =
I-
M I+
MM
M.
ε
ε
ε
ε
Тогда
)-1
(
)-1
(1
1
1
1
Rε = C(Q + εI)-1CT
=
CCT -
CM(I +
MM)-1
MCT
ε
ε
ε
ε
Заметим, что матрица CCT обратима. Вновь применяя лемму 1, получаем
Rε = ε(CCT)-1 +
(
)-1
1
(
)
+ (CCT)-1CM I +
M
I - CT(CCT)-1C
M MCT(CCT)-1.
ε
49
Воспользуемся известными равенствами
CT(CCT)-1 = C+, I - CT(CCT)-1C = N = N2
и перепишем Rε в виде
(
)-1
1
Rε = ε(CCT)-1 + C+TM I +
MNNM MC+.
ε
Применяя лемму 1, получаем
(
)
(
)
Rε = ε(CCT)-1 + C+TM I - MN
εI + NMMN
-1NM MC+.
Тогда согласно лемме 2, учитывая, что M = MT, N = NT, имеем
(
)
(
)+
R = lim
Rε
=C+TM I - MN
MN
MC+.
ε→0+
(
)+
Наконец заметим, что I - MN
MN
≽ 0 и, следовательно, R ≽ 0.
Доказательство следствия 2. Если C - проекция на R2, то m = 2,
r ≤ 2. Значит, образом (k,n)-цилиндра может быть только (0,2), (1,2) или
(2, 2)-цилиндр.
Лемма 3
[12]. Если A ∈ Rn×m, B ∈ Rk×l, C ∈ Rn×l, то матричное урав-
нение
AXB = C
разрешимо относительно X ∈ Rm×k тогда и только тогда, когда
AA+CB+B = C,
и в этом случае все решения можно параметризовать как
X = A+CB+ + Y - A+AY BB+,
где Y ∈ Rm×k - произвольная матрица.
Лемма 4
[13]. Если A ∈ Sn, B ∈ Rm×n и A2 = A, то A(BA)+ = (BA)+.
Лемма 5
[14]. Если A ∈ Rn×m, B ∈ Rk×n, C ∈ Sn, то матричное нера-
венство
AXB + (AXB)T + C ≺ 0
разрешимо относительно X ∈ Rm×k в том и только в том случае, если
существуют µ1, µ2 ∈ R такие, что
C ≺ µ1AAT, C ≺ µ2BTB.
50
Доказательство теоремы 1. Введем переменную y(t) = Cx(t) ∈ Rk,
составим уравнение ее динамики
y(t) = CAx(t) + CBf(t)
и найдем условие, при котором оно может быть записано независимо от x(t),
т.е. условие существования матрицы X такой, что
y(t) = XCx(t) + CBf(t) = Xy(t) + CBf(t).
Для этого рассмотрим уравнение CA = XC. В соответствии с леммой 3 оно
разрешимо относительно X в том и только в том случае, если выполнено
условие CA(I - C+C) = 0, и тогда все решения могут быть параметризова-
ны как X = CAC+ + Y (I - CC+), где Y - произвольная матрица соответ-
ствующей размерности. Если дополнительно выполнено условие rankC = k,
то уравнение имеет единственное решение X = CAC+.
Так как все соответствующие условия включены в формулировку теоремы,
динамика переменной y(t) может быть записана независимо от x(t) в виде
(Π.1)
y(t) = CAC+y(t) + CBf(t).
Обозначим: V = yTP y. Заметим, что из матричного неравенства
[
]
PCAC+ + (CAC+)TP + αP PCB
≺0
(CB)TP
-αG
следует, что
[y(t)]T [PCAC+ + (CAC+)TP + αP PCB][y(t)]
≤ 0,
∀t ≥ 0,
f (t)
(CB)TP
-αG f(t)
и тогда
V (t) + αV (t) ≤ αfT(t)Gf(t),
∀t ≥ 0.
При выполнении условия (6) из этого следует, что
lim sup V (t) ≤ 1
t→+∞
и если V (t0) ≤ 1, то V (t) ≤ 1 при всех t ≥ t0. При этом V = xTCTP Cx,
CTPC ≽ 0 и rankCTPC = k, а значит, подмножество
{
}
x∈Rn
xTQx ≤ 1 , Q = CTPC
пространства состояний системы (5)-(6) является притягивающим (k, n)-ци-
линдром.
51
Доказательство теоремы
2. В соответствии с теоремой 1 под-
множество {s ∈ Rn | sTKTP Ks ≤ 1} системы (12) является притягивающим
(k, n)-цилиндром, если выполнены условия
(Π.2)
KM(I - K+
K) = 0,
[
]
PKMK+ + (KMK+)TP + αP PKN
(Π.3)
≺ 0.
(KN)TP
-αG
Для существования регулятора (9) такого, чтобы для замкнутой системы
(12) выполнялось условие (Π.2), необходимо и достаточно, чтобы уравнение
K(A + BXD)(I - K+K) = 0
⇔ KBXD(I - K+K) = -KA(I - K+K)
было разрешимо относительно X. В соответствии с леммой 3 это так в том и
только в том случае, если выполнено
KB(KB)+KA(I - K+K)(D(I - K+K))+D(I - K+K) =
(Π.4)
= KA(I - K+K),
причем все соответствующие матрицы X могут быть параметризованы как
X = (KB)+KA(K+K - I)(D(I - K+K))+ +
(Π.5)
+ Y - (KB)+KBY D(I - K+K)(D(I - K+K))+,
где Y - произвольная матрица соответствующей размерности. Согласно лем-
ме 4 (Π.4) и (Π.5) равносильны (15) и (17) соответственно.
С учетом выражений M = A + BXD, N = C + BXF условие (Π.3) может
быть переписано в виде
[
]
PKAK+ + (KAK+)TP + αP PKC
+
(KC)TP
-αG
]
)T
[PKB
([PKB]
+
X
[DK+ F] +
X
[DK+ F]
≺0
0
0
и после подстановки (17) и применения обозначений (14) представлено как
[
]
PH1 + HT1 P + αP PH2
[PH3]
]
+
Y
[H4 H5
+
HT2P
-αG
0
(Π.6)
]
)T
([PH
]
3
+
Y
[H4 H5
≺ 0.
0
Согласно лемме 5 соответствующая матрица Y - а значит, и набор X парамет-
ров регулятора (9) - существует в том и только в том случае, если найдутся
µ1,µ2 ∈ R, при которых выполнены матричные неравенства
[
]
]
PH1 + HT1 P + αP PH2
[PH3HT3P
0
(Π.7)
≺µ1
,
HT2P
-αG
0
0
52
[
]
[
]
PH1 + HT1 P + αP PH2
HT4H4
HT4H5
(Π.8)
≺µ2
HT2P
-αG
HT5H4
HT5H5
Заметим, что если матрица Q такова, что P Q = I, то (Π.7) равносильно
[
]
]
H1Q + QHT1 + αQ H2
[H3HT3
0
(Π.9)
≺µ1
,
HT2
-αG
0
0
[
]
Q 0
чтобы увидеть это, достаточно умножить (Π.7) слева и справа на
≻ 0.
0
I
Для завершения доказательства осталось заметить, что (Π.8), (Π.9) совпа-
дают с (16), (Π.6) равносильно (18) и что при фиксированных α, P матричное
неравенство (18) является линейным.
СПИСОК ЛИТЕРАТУРЫ
1.
Назин С.А., Поляк Б.Т., Топунов М.В. Подавление ограниченных внешних воз-
мущений с помощью метода инвариантных эллипсоидов // АиТ. 2007. № 3.
С. 106-125.
Nazin S.A., Polyak B.T., Topunov M.V. Rejection of Bounded Exogenous Distur-
bances by the Method of Invariant Ellipsoids // Autom. Remote Control. 2007. V. 68.
No. 3. P. 467-486.
2.
Поляк Б.Т., Топунов М.В. Подавление ограниченных внешних возмущений:
управление по выходу // АиТ. 2008. № 5. С. 72-90.
Polyak B.T., Topunov M.V. Suppression of Bounded Exogenous Disturbances: Out-
put Feedback // Autom. Remote Control. 2008. V. 69. No. 5. P. 801-818.
3.
Хлебников М.В. Подавление ограниченных внешних возмущений: линейный ди-
намический регулятор по выходу // АиТ. 2011. № 4. С. 27-42.
Khlebnikov M.V. Suppression of Bounded Exogenous Disturbances: A Linear Dy-
namic Output Controller // Autom. Remote Control. 2011. V. 72. No. 4. P. 699-712.
4.
Железнов К.О., Хлебников М.В. Применение метода инвариантных эллипсои-
дов для решения линейной задачи слежения // Тр. МФТИ. 2013. Т. 5. № 4.
С. 115-121.
5.
Железнов К.О., Квинто Я.И., Хлебников М.В. Решение задачи слежения для
линейной системы управления на основе метода инвариантных эллипсоидов //
УБС. 2018. № 71. С. 45-60.
6.
El Ghaoui L., Oustry F., AitRami M. A Cone Complementarity Linearization Al-
gorithm for Static Output-Feedback and Related Problems // IEEE Trans. Autom.
Control. 1997. V. 42. No. 1. P. 1171-1176.
7.
Briat C. Linear Parameter-Varying and Time-Delay Systems: Analysis, Observation,
Filtering and Control. Springer, 2015.
8.
Arzelier D., Henrion D., Peaucelle D. Robust State-Feedback D-stabilization via a
Cone Complementarity Algorithm // 6th European Control Conference. Portugal.
2001.
9.
Song X., Zhou S., Zhang B. A Cone Complementarity Linearization Approach to
Robust H∞-controller Design for Continuous-Time Piecewise Linear Systems with
Linear Fractional Uncertainties // Nonlinear Analysis: Hybrid Systems. 2008. V. 2.
No. 4. P. 1264-1274.
53
10. Henderson H. V., Searle S. R. On Deriving the Inverse of a Sum of Matrices //
SIAM Rev. 1981. V. 23. No. 1. P. 53-60.
11. Gene G. H., Van Loan C. F. Matrix Computations. Johns Hopkins University Press,
1996.
12. Skelton R.E., Iwasaki T., Grigoriadis K.M. A Unified Algebraic Approach to Linear
Control Design / Nonlinear Analysis. London: Taylor & Francis, Ltd, 1998.
13. Maciejewski A.A., Klein C.A. Obstacle Avoidance for Kinematically Redundant Ma-
nipulators in Dynamically Varying Environments // Int. J. Robot. Res. 1985. V. 4.
No. 3. P. 109-117.
14. Boyd S., El Ghaoui L., Feron E., Balakrishnan V. Linear Matrix Inequalities in
System and Control Theory. Philadelphia: SIAM, 1994.
Статья представлена к публикации членом редколлегии М.В. Хлебниковым.
Поступила в редакцию 02.04.2020
После доработки 15.07.2020
Принята к публикации 10.09.2020
54