Автоматика и телемеханика, № 3, 2021
Линейные системы
© 2021 г. К.Р. АЙДА-ЗАДЕ, д-р физ.-мат. наук, член-корр. НАН Азербайджана
(kamil_aydazade@rambler.ru)
(Институт систем управления НАН Азербайджана;
Институт математики и механики НАН Азербайджана, Баку),
В.М. АБДУЛЛАЕВ, д-р физ.-мат. наук (vaqif_ab@rambler.ru)
(Азербайджанский государственный университет нефти и промышленности;
Институт систем управления НАН Азербайджана, Баку)
ОПТИМИЗАЦИЯ ПРАВЫХ ЧАСТЕЙ НЕЛОКАЛЬНЫХ КРАЕВЫХ
УСЛОВИЙ УПРАВЛЯЕМОЙ ДИНАМИЧЕСКОЙ СИСТЕМЫ
Исследуется задача оптимального управления, описываемая систе-
мой обыкновенных линейных дифференциальных уравнений c краевыми
условиями, содержащими точечные и интегральные значения фазовой пе-
ременной. В задаче определяются управления, участвующие в дифферен-
циальных уравнениях, и значения правых частей нелокальных краевых
условий. Исследованы необходимые условия существования и единствен-
ности решения краевой задачи, выпуклости целевого функционала, необ-
ходимые условия оптимальности оптимизируемых параметров в задаче
управления. Полученные формулы для градиента целевого функционала
задачи использованы для численного решения иллюстративной задачи.
Приведены результаты численных экспериментов.
Ключевые слова: градиент функционала, выпуклость функционала, нело-
кальные условия, условия оптимальности, многоточечные условия.
DOI: 10.31857/S0005231021030016
1. Введение
Статья посвящена исследованию задачи оптимального управления систе-
мой обыкновенных линейных дифференциальных уравнений с нелокальными
условиями, содержащими слагаемые с точечными и интегральными значе-
ниями фазовой функции.
Изучение нелокальных краевых задач было начато еще в [1-3] и продолже-
но в публикациях многих других исследователей [4-14]. Практическая важ-
ность и необходимость изучения нелокальных краевых задач и соответствую-
щих задач управления объясняется тем, что полученная измерениями ин-
формация о состоянии объекта в какой-либо точке объекта или в какой-либо
момент времени может охватывать состояние нескольких точек или целой
окрестности точки или момента времени замера.
Отметим, что различные постановки задач оптимального управления си-
стемами с многоточечными и промежуточными условиями рассмотрены во
3
многих публикациях [15-18]. Для этих задач были получены условия опти-
мальности в различных формах [19-21] и предложены численные схемы ре-
шения включая случаи нелокальности самых дифференциальных (интегро-
дифференциальных, нагруженных) уравнений [12, 22].
Данная статья отличается от ранее проведенных исследований в основ-
ном тем, что здесь оптимизируемыми являются сами значения правых частей
нелокальных краевых условий. На практике такая задача возникает, напри-
мер, при управлении динамическим объектом, в граничных точках которого
имеют место нелокальные краевые условия, обусловленные какими-либо фи-
зическими законами, и дополнительно воздействуют источники с оптимизи-
руемыми значениями параметров. В частности, можно привести пример оп-
тимизации напряженного состояния одномерной механической конструкции,
находящейся под оптимизируемой распределенной нагрузкой по всей длине
конструкции и под оптимизируемыми внешними воздействиями на ее концы.
В статье получены условия существования и единственности решения
нелокальной краевой задачи, выпуклости целевого функционала задачи,
необходимые условия оптимальности для рассматриваемой задачи оптималь-
ного управления и оптимизации. Для получения формул для компонент гра-
диента функционала предложено использовать две техники в зависимости
от ранга матрицы коэффициентов при точечных значениях фазовой век-
тор-функции в нелокальных условиях. Одна техника использует идею метода
условного градиента [23, 24], другая метод Лагранжа [24]. Применение ме-
тода Лагранжа приводит к увеличению как числа условий, так и размерности
вектора параметров, требующего определения. Поэтому авторы предпочита-
ют, в зависимости от ранга матрицы условий, первый подход.
Результаты данной статьи могут быть использованы в задачах оптималь-
ного управления, описываемых нелокальными функциональными уравнения-
ми, при применении к ним каких-либо методов аппроксимации (в частности,
методов прямых) по пространственным или временной переменным.
В статье приведены результаты численных экспериментов на примере од-
ной иллюстративной задачи. Для ее численного решения с применением ме-
тодов оптимизации первого порядка использованы полученные в статье фор-
мулы для компонент градиента функционала.
2. Постановка задачи
Рассматривается задача управления объектом, динамика которого описы-
вается линейной системой дифференциальных уравнений:
(2.1)
x(t) = A1(t)x(t) + A2(t)u(t), t ∈ [t1, tf
],
с нелокальными (с неразделенными многоточечными и интегральными) усло-
виями и с оптимизируемыми значениями правых частей:
∫
∑
∑
(2.2)
αix(ti) +
βj
(t)x(t)dt = ϑ.
i=1
j=1 t2j-1
4
Здесь: x(t) ∈ Rn фазовая переменная; u(t) ∈ U ⊂ Rr управляющая век-
тор-функция из класса кусочно-непрерывных функций, допустимые значе-
ния которой принадлежат заданному выпуклому компактному множеству U;
ϑ ∈ V ⊂ Rn вектор, значения которого определяются оптимизируемыми
воздействиями внешних источников, V заданные выпуклое и компактное
множество. Заданными являются: кусочно-непрерывные размерности n × n
A1(t), размерности n × r A2(t) и интегрируемые βj(t) размерности n × n
матричные функции; постоянные матрицы αi, i = 1, 2, . . . , l1, размерности
n × n; упорядоченные моменты времени ti,tj ∈ [t1,tf], причем ti ∈ [t2j-1,t2j],
i = 1,2,... ,l1, j = 1,2,... ,l2, при этом t1 = t1, tl1 = tf; l1,l2
целые числа.
Целевым функционалом для нахождения оптимальных управления u(t) и
вектора параметров ϑ является
∫tf
(2.3)
J (u, ϑ) = f0(x(t), u(t), ϑ, t)dt + Φ(x, x, ϑ) → min
u(t)∈U,ϑ∈V
t1
Здесь f0(x, u, ϑ, t), Φ(x, x, ϑ) заданные непрерывно дифференцируемые по
x, x, x,u,ϑ функции и использованы обозначения:
(
)
(
)
t=
t1, t2,... , tl1
,
t=
t1, t2,... , t2l2
,
(
)T
(
x=
x1, x2,... , xl1
= x
(t1),x(t2),...,x(tl1))T ∈ Rl1n,
(
)T
(
x=
x1, x2,... , x2l2
= x
(t1),x(t2),...,x(t2l2))T ∈ R2l2n,
“T” знак транспонирования.
Будем предполагать, что в (2.2) имеются n линейно независимых условий.
В случае меньшего числа линейно независимых условий или, вообще, мень-
шего числа условий, например n1, n1 < n, тогда соответственно ϑ ∈ Rn1 . Это
значит, что в задаче имеются n - n1 свободных (незакрепленных) начальных
условий. Тогда в условия (2.2) можно добавить еще оптимизируемые значе-
ния начальных условий для каких-либо n - n1 компонент фазового векто-
ра x(t), расширив тем самым вектор ϑ ∈ Rn1 до ϑ ∈ Rn.
3. Получение условий оптимальности
Далее будем предполагать, что для всех допустимых управлений u(t) и па-
раметров ϑ задача (2.1), (2.2) имеет решение, причем единственное. Для этого
должно выполняться условие, приведенное в следующей теореме 1. В теоре-
ме 1 матрица F (t, τ) является фундаментальной матрицей решений систе-
мы (2.1), т.е. является решением матричной задачи Коши:
˙
F
(t, τ) = A1(t)F (t, τ), t, τ ∈ [t1, tf ], F (t1, t1) = E,
где E n-мерная единичная матрица.
5
Теорема 1. Задача (2.1), (2.2) для произвольных кусочно-непрерывных
вектор функций u(t) и вектора параметров ϑ имеет решение, причем един-
ственное, если функции A1(t), A2(t) кусочно-непрерывны, βj(t), j = 1,2,
...,l2,
интегрируемы и
∫
∑
∑
(3.1)
rank αiF (t
i,t1) +
βj(t)F(t,t1)dt
= n.
i=1
j=1 t2j-1
Доказательства теорем 1, 2, 3 и 4 приведены в Приложении.
Имеет место следующая теорема 2.
Теорема 2. Пусть допустимые множества U, V и функции
f0(x(t),u(t),ϑ,t) и Φ(x, x,ϑ) по x, x, x,u,ϑ выпуклы. Тогда функционал J(u,ϑ)
является выпуклым. В случае если дополнительно одна из функций
f0(x(t),u(t),ϑ,t) и Φ(x, x,ϑ) сильно выпукла, то функционал задачи также
является сильно выпуклым.
Исследуем дифференцируемость функционала (2.3) и получим форму-
лы для компонент его градиента по оптимизируемым параметрам u(t) ∈ Rr,
ϑ∈Rn.
∕
∕
∕
∕
∕
Производные ∂f0
∂x, ∂f0
∂u, ∂f0
∂ϑ, ∂Φ
∂xi, ∂Φ
∂xj будем понимать
как строки соответствующих размерностей. Для произвольных функций f(t),
определенных на отрезке [t1, tf ], используем обозначения:
f (t±) = f(t ± 0) = lim
f (t ± ε), Δf(t) = f(t+) - f(t-),
ε→+0
ε≥0
а для удобства записи далее некоторых формул будем считать, что
f (tf+) = f(t1-) = 0,
характеристическая функция:
а χ[t2j-1,t2j](t), j = 1,2,... ,l2,
{
0, t ∈ [t2j-1, t2j ],
χ[t2j-1,t2j](t)=
1, t ∈ [t2j-1, t2j ],
j = 1,2,...,l2.
Пусть ранг расширенной матрицы α = [α1, α2, . . . , αl1 ] размерности n × l1n
равен n. Ясно, что
(3.2)
rankα = n ≤ n.
В случае n < n условия (2.2) за счет их линейной комбинации можно при-
вести к такому виду, что последние n - n строк матрицы α = [α1, α2, . . . , αl1 ]
будут нулевыми. При этом линейной комбинации подвергнутся и интеграль-
ные слагаемые в условиях (2.2). Но важно, что эти преобразования не нару-
шат выполнения условия (3.1) для существования и единственности решения
6
краевой задачи (2.1), (2.2) для произвольных пар (u, ϑ). Чтобы не вводить но-
вые обозначения, пусть матрицы αi, i = 1, 2, . . . , l1, имеют размерности n × n,
а ранг их расширенной матрицы равен n. Тогда ограничения (2.2) разобьем
на две части: первые n ограничений запишем в виде
∫
∑
∑
(3.3)
αix(ti) +
β1j(t)x(t)dt = ϑ(1),
i=1
j=1 t2j-1
а в последних n - n ограничениях будут отсутствовать точечные значения
функции x(t):
∫
∑
(3.4)
β2j(t)x(t)dt = ϑ(2).
j=1 t2j-1
Здесь матрицы αi, β1j(t), i = 1, 2, . . . , l1, j = 1, 2, . . . , l2, имеют размерность
n × n, а матрицы β2j(t), j = 1,2,...,l2,
размерность (n - n) × n, векторы
(
)
ϑ(1) ∈ Rn, ϑ(2) ∈ Rn-n, ϑ =
ϑ(1),ϑ(2)
∈Rn.
В силу изложенного из расширенной матрицы α можно извлечь матрицу
α ранга n, образованную n столбцами матрицы α:
⌢
⌢
⌢
⌢
1,k1
⌢
1,ki
⌢
1,kn
1i
1n
···
α
···
α
α
s1
···
α
si
···
α
sn
⌢
⌢
⌢
21
2i
2n
⌢
2,k1
⌢
2,ki
⌢
2,kn
α
···
α
···
α
α
···
α
···
α
⌢
s1
si
sn
α
=
=
.
⌢
n1
⌢
ni
⌢
nn
⌢
n,k1
⌢
n,ki
⌢
α
···
α
···
α
n,kn
α
···
α
···
α
s1
si
sn
Здесь ki является номером столбца матрицы αsi , 1 ≤ si ≤ l1, i = 1, 2, . . . , n,
α
является ki-м столбцом матрицы αsi .
Пусть
(
)T
⌢
⌢
x
=
x
xn
=
(
)T
(
)
=
xk1(ts1 ),xk2 (ts2),... ,xk¯n (tsn )
T =
xs1k1 ,xk22 ,...,xknn
есть n-мерный вектор, состоящий из компонент вектора x(t) и образованный
α значений xj-х координат n-мерного векто-
ра x(t) в моменты времени tsj , 1 ≤ sj ≤ l1, j = 1, 2, . . . , n.
Пусть α и x есть остаточные матрица размера (n×(l1n-n)) и (l1n - n)-мер-
ный вектор, полученные удалением из матрицы α n столбцов, а из вектора x
x.
7
Пусть i-й столбец матрицы
α является gi-м столбцом матрицы αqi ,
1 ≤ gi ≤ n, 1 ≤ qi ≤ l1, i = 1,2,... ,(l1n - n):
1,q(l1n-n)
αg,q11
··· αg,qii
··· α
g(l1n-n)
2,q(l1n-n)
αg,q11
··· αg,qii
··· α
g(l
α=
1n-n)
,
n,q(l1n-n)
αg,q11
··· αg,qii
··· α
g(l
1n-n)
(
)T
(
)T
x = xg1(tq1),xg2(tq2),... ,xg
(tq(l1n-n) )
= xq1g1 , xg22 , . . . , xg(l1n−n)(1
(l1n-n)
Ясно, что (gi, qi) = (sj , kj ), j = 1, 2, . . . , n, i = 1, 2, . . . , (l1n - n).
α-1 обозна-
α-1 α) размера (n × (l1n - n))
через B с элементами bij .
Далее отдельно рассмотрим случаи, когда n = n и n < n.
Теорема 3. Пусть выполнены условия: функции A1(t), A2(t) кусочно-
непрерывны; f0(x(t),u(t),ϑ,t) и Φ(x, x,ϑ)
непрерывно дифференцируемые
по x, x, x,u,ϑ; краевая задача (2.1), (2.2) имеет единственное решение при
произвольных функциях u(t) ∈ U и параметраx ϑ ∈ V .
Тогда функционал (2.3) дифференцируем по управлению u(t) и парамет-
рам ϑ правых частей нелокальных краевых условий, а градиент функционала
α = n определяется формулами
)T
(∂f0(x(t),u(t),ϑ,t)
(3.5)
graduJ(u, ϑ) = -AT2(t)ψ(t) +
,
∂u
[
]
∑
∂J(u,ϑ)
∂Φ(x, x,ϑ)
(3.6)
=
+ Δψki(tsi) cik +
∂ϑk
∂xsi
i=1
ki
∫tf
∂Φ(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
+
+
dt, k = 1, 2, . . . , n,
∂ϑk
∂ϑk
t1
где вектор-функция ψ(t), непрерывно-дифференцируемая почти всюду на от-
резке [t1,tf ] кроме точек ti, tj, i = 2,3,... ,l1 - 1, j = 1,2,... ,2l2, является
решением сопряженной задачи:
)T
(∂f0(x(t),u(t),ϑ,t)
(3.7)
ψ(t) = -AT1(t)ψ(t) +
+
∂x
(
)
∑
∑
∂Φ(x, x,ϑ)
α-1)T
,
+ χ[ˆt2j-1,t2j](t)βj
si
+ ψki(tsi-) - ψki(t+i)
∂x
j=1
i=1
ki
8
(
)
∑
∂Φ(x, x,ϑ)
qν
(3.8)
ψg
(t
biν
+
ν
+
) = ψgν(tqν- ) +
+ ψki(tsi-) - ψki(t+i)
∂xsi
i=1
ki
∂Φ(x, x,ϑ)
+
,
ν = 1,2,...,l1n,
∂xg
ν
(3.9)
ψi(tj+) = ψi(tj-) +∂Φ(x,x,ϑ),
i = 1,2,...,n, j = 1,2,...,2l2.
∂xj
i
Из теоремы 1 можно получить формулы для более простых частных слу-
чаев, когда ранги каких-либо из матриц αi, i = 1, 2, . . . , l1, равны n и они
α.
Следствие 1. Если rankα1 = n, а следовательно, существует α-11, то
для компонент градиента функционала по ϑ можно получить формулу
[
]
∂ΦT(x, x,ϑ)
(3.10)
gradϑJ(u, ϑ) = -(α-11)T ψ(t1) -
+
∂x1
t
f
∫
∂ΦT(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
+
+
dt,
∂ϑ
∂ϑ
t1
где сопряженная краевая задача имеет вид
)T
(∂f0(x(t),u(t),ϑ,t)
(3.11)
ψ(t) = -AT1(t)ψ(t) +
+
∂x
(
)
∑
(
)T
∂ΦT(x, x,ϑ)
α-11
ψ(t1) -
,
+ χ[ˆt2j-1,t2j](t)βj(t)
∂x1
j=1
∂ΦT(x, x,ϑ)
∂ΦT(x, x,ϑ)
(3.12)
αTl(α-11)Tψ(t1) + ψ(tf ) = -
+αTl(α-11)T
,
1
1
∂xl1
∂x1
(3.13)
ψ(ti+) = ψ(ti-) + αTi(α-11)Tψ(t1) +∂ΦT(x,x,ϑ)
-
∂xi
∂ΦT(x, x,ϑ)
− αTi (α-11)T
,
i = 2,3,...,l1 - 1,
∂x1
(3.14)
ψ(tj+) = ψ(tj-) +∂ΦT(x,x,ϑ),
j = 1,2,...,2l2.
∂xj
Следствие 2. Если rankαl1 = n, то для компонент градиента функ-
ционала по ϑ имеет место формула
[
]
∂ΦT(x, x,ϑ)
(3.15)
gradϑJ(u, ϑ) = -(α-1l)T ψ(tf ) -
+
1
∂xl1
f
∫
t
∂ΦT(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
+
+
dt,
∂ϑ
∂ϑ
t1
9
а сопряженная краевая задача имеет вид:
)T
(∂f0(x(t),u(t),ϑ,t)
(3.16)
ψ(t) = -AT1(t)ψ(t) +
+
∂x
(
)
∑
∂ΦT(x, x,ϑ)
+
)T
-ψ(tf ) -
,
χ[t2j-1,t2j](t)βj(t)(α
1
∂xl1
j=1
∂ΦT(x, x,ϑ)
∂ΦT(x, x,ϑ)
(3.17)
ψ(t1) + αT1(α-1l)Tψ(tf ) =
- αT1 (α-1l
)T
,
1
1
∂x1
∂xl1
(3.18)
ψ(ti+) = ψ(ti-) - αTi(α-1)Tψ(tf
)+
l1
∂ΦT(x, x,ϑ)
∂ΦT(x, x,ϑ)
+
- αTi (α-1l
)T
,
i = 2,3,...,l1 - 1,
1
∂xi
∂xl1
(3.19)
ψ(tj+) = ψ(tj-) +∂ΦT(x,x,ϑ),
j = 1,2,...,2l2.
∂xj
Следствие 3. Если обратима одна из матриц αs,2 ≤ s ≤ l1 - 1, то
]
[(
)
∂ΦT(x, x,ϑ)
(3.20)
gradϑJ(u, ϑ) = -(α-1s)T ψ(ts-) - ψ(ts+)
-
+
∂xs
f
∫
t
∂ΦT(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
+
+
dt,
∂ϑ
∂ϑ
t1
а сопряженная краевая задача имеет вид:
)T
(∂f0(x(t),u(t),ϑ,t)
(3.21)
ψ(t) = -AT1(t)ψ(t) +
+
∂x
(
)
∑
(
)
∂ΦT(x, x,ϑ)
)T
-
ψ(ts-) - ψ(ts+)
-
,
+ χ[ˆt2j-1,t2j](t)βj(t)(αs1
∂xs
j=1
(
)
(3.22)
ψ(t1) = αT1(α-1s)T
ψ(ts-) - ψ(ts+)
+
∂ΦT(x, x,ϑ)
∂ΦT(x, x,ϑ)
+
αT1(α-1s)T
,
∂x1
∂xs
(
)
∂ΦT(x, x,ϑ)
(3.23)
ψ(tf ) = -αTl(α-1s)T
ψ(ts-) - ψ(ts+)
-
+
1
∂xl1
∂ΦT(x, x,ϑ)
+αTl(α-1s)T
,
1
∂xs
10
(
)
∂ΦT(x, x,ϑ)
(3.24)
ψ(ti
) = ψ(ti+) + αTi (α-1s)T
ψ(ts-) - ψ(ts+)
+
-
+
∂xi
∂ΦT(x, x,ϑ)
− αTi (α-1s)T
,
i = 2,3,...,l1 - 1, i = s,
∂xs
(3.25)
ψ(tj+) = ψ(tj-) +∂ΦT(x,x,ϑ),
j = 1,2,...,2l2.
∂xj
Теперь рассмотрим случай, когда rankα = n < n.
Теорема 4. Пусть выполнены все условия, приведенные в теореме 3, и
rankα = n < n.
Тогда функционал (2.3) дифференцируем по управлению u(t) и парамет-
рам ϑ правых частей нелокальных краевых условий, градиент функциона-
ла по управлению u(t) определяется формулой (3.5), а по параметрам ϑ =
= (ϑ1, ϑ2) следующими формулами:
[
]
∑
∂J(u,ϑ)
∂Φ(x, x,ϑ)
(3.26)
=
+ Δψki(tsi) cik +
(1)
∂xsi
∂ϑ
ki
k
i=1
∫
tf
∂Φ(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
+
+
dt, k = 1, 2, . . . , n,
∂ϑ(1)
∂ϑ(1)
k
k
t1
∂J(u,ϑ)
∂Φ(x, x,ϑ)
(3.27)
= -λk +
+
∂ϑ(2)k
∂ϑ(2)
k
∫tf
∂f0(x(t),u(t),ϑ,t)
+
dt, k = 1, 2, . . . , (n - n),
∂ϑ(2)
k
t1
где ψ(t) ∈ Rn, λ ∈ Rn удовлетворяют условиям сопряженной задачи:
)T
(∂f0(x(t),u(t),ϑ,t)
(3.28)
ψ(t) = -AT1(t)ψ(t) +
-
∂x
∑
- χ[ˆt2j-1,t2j](t)(βj(t))Tλ+
j=1
∑
α-1)T ×
j=1
(
(
))
∑
∂Φ(x, x,ϑ)
×
,
+ ψki(tsi-) - ψki(t+i)
∂xsi
i=1
ki
11
(
)
∑
∂Φ(x, x,ϑ)
qν
(3.29)
ψg
(t
biν
+
ν
+
) = ψgν(tqν- ) +
+ ψki(tsi-) - ψki(t+i)
∂xsi
i=1
ki
∂Φ(x, x,ϑ)
+
,
ν = 1,2,...,(l1n - n),
∂xg
ν
(3.30)
ψi(tj+) = ψi(tj-) +∂Φ(x,x,ϑ),
i = 1,2,...,n, j = 1,2,...,2l2.
∂xj
i
Отметим частный случай, когда n = 0. Получение формул для компонент
градиента по ϑ в этом случае упрощается, так как для всех условий (2.2)
будет использован метод Лагранжа, что приведет, конечно, к увеличению
размерности задачи за счет увеличения размера вектора λ до n, т.е. λ ∈ Rn.
Компоненты градиента функционала, пользуясь выкладками, приведенными
в доказательстве теоремы 4 по отношению условий (3.4), можно получить в
виде
∫tf
∂f0(x(t),u(t),ϑ,t)
∂Φ(x, x,ϑ)
(3.31)
gradϑJ(u, ϑ) =
dt +
− λ.
∂ϑ
∂ϑ
t1
Формула для graduJ(u, ϑ) будет такой же, как в (3.5), а ψ(t) и λ являются
решением сопряженной краевой задачи с 2n условиями
∑
(3.32)
ψ(t) = -AT1(t)ψ(t) +
λ+
χ[t2j-1,t2j](t)(βj(t))T
j=1
)T
(∂f0(x(t),u(t),ϑ,t)
+
,
∂x
∂ΦT(x, x,ϑ)
(3.33)
ψ(t1) =
+αT1
λ,
∂x1
∂ΦT(x, x,ϑ)
(3.34)
ψ(tf ) = -
-αTλ
l1
∂xl1
и у словиями скачка:
(3.35)
ψ(ti+) = ψ(ti-) +∂ΦT(x,x,ϑ)
+ αTi λ, i = 2,3,... ,l1
− 1,
∂xi
(3.36)
ψ(tj+) = ψ(tj-) +∂ΦT(x,x,ϑ),
j = 1,2,...,2l2.
∂xj
Формулы (3.32)-(3.36) отличаются от формул, приведенных в теоремах 3
и 4, размерностью параметров и числом условий, участвующих в сопряжен-
ной задаче. В приведенных в теореме 3 формулах для случая rankα = n = n
12
число краевых условий для сопряженной переменной было равно n, а неиз-
вестных параметров не имелось. В случае n < n в формулах (3.27), (3.28) и
(3.31)-(3.34) участвует (n - n)-мерный вектор множителей Лагранжа λ, для
определения которого имеются еще дополнительные n - n краевых условий,
общее число которых равно 2n - n.
Замечание. Во многих практических задачах в условии (2.2) оптимизи-
руемыми являются не все компоненты вектора ϑ ∈ Rn, а некоторая его часть.
В этом случае из приведенных формул градиента функционала необходимо
использовать те, которые соответствуют оптимизируемым параметрам.
Теперь сформулируем необходимые условия оптимальности в задаче (2.1)-
(2.3).
Теорема 5. Пусть функционал задачи (2.1)-(2.3) дифференцируем, до-
пустимые множество Uкусочно-непрерывных управлений u(t) и множе-
ство V параметров ϑ правых частей краевых условий (2.2) выпуклы. Тогда
выполнение условий
(3.37)
〈graduJ(u∗, ϑ∗), u(t) - u∗
(t)〉 ≥ 0,
(3.38)
〈gradϑJ(u∗, ϑ∗), ϑ - ϑ∗
〉 ≥ 0,
почти для всех t ∈ [t1,tf ] необходимо и достаточно для оптимальности
тройки (u∗(t),ϑ∗,x∗(t)), где graduJ(u∗,ϑ∗) определяется из формулы (3.5), а
gradϑJ(u∗, ϑ∗) определяется в зависимости от ранга расширенной матрицы
α = [α1,α2,...,αl1] одной из формул (3.6), (3.10), (3.15), (3.20), (3.26), (3.27)
или (3.31).
Используемое в формулах обозначение 〈·, ·〉 означает скалярное произве-
дение в соответствующих пространствах [24].
Доказательство теоремы следует из выпуклости допустимой обла-
сти V и выпуклости и дифференцируемости целевого функционала J(u, ϑ)
(см. [23, 24]).
4. Схема численного решения задачи и
результаты компьютерных экспериментов
Пользуясь полученными формулами для компонент градиента целевого
функционала, для численного решения задачи можно использовать извест-
ные итерационные методы оптимизации первого порядка. В случае если до-
пустимые множества оптимизируемых управлений U и параметров V имеют
простую структуру (параллелепипед, шар и т.п.), то эффективно использо-
вать метод проекции градиента [23, 24]:
[
]
(4.1)
(u(t))k+1 = PU (u(t))k - α graduJ(uk, ϑk) ,
[
]
ϑk+1 = PV ϑk - α gradϑJ(uk,ϑk) ,
(
)
αk = arg minJ(PU uk - αgraduJ(uk,ϑk)
,
α≥0
PV (ϑk - αgradϑJ(uk,ϑk))), k = 0,1,...
13
Здесь PU (u) и PV (ϑ) операторы проектирования управления u(t) и па-
раметра ϑ на допустимые множества соответственно U и V , αk ≥ 0 шаг
одномерной минимизации.
В случае если допустимое множество V задано в общем виде с помощью
равенств и неравенств
V = {ϑ ∈ Rn : gi(ϑ) ≤ 0,hj(ϑ) = 0,i = 1,2,... ,m1,j = 1,2,...,m2},
то можно использовать, например, методы штрафных функций [23, 24]. При
этом в приведенных выше формулах несущественно изменятся только вы-
ражения для компонент градиента функционала по ϑ за счет добавления в
функцию Φ(x, x, ϑ) штрафного члена в качестве слагаемого.
В случае отсутствия ограничений на оптимизируемые параметры можно
использовать какие-либо эффективные численные методы безусловной опти-
мизации, например методы сопряженных градиентов [23, 24].
Для численного решения систем дифференциальных уравнений с многото-
чечными условиями как для прямой задачи (2.1), (2.2), так и для сопряжен-
ной задачи при заданных управлении u(t) и векторе параметров ϑ можно
использовать метод сдвига условий, предложенный в публикациях авторов
[8, 9, 14, 25]. Другой подход к численному решению задачи (2.1), (2.2) за-
ключается в том, что сначала введением новых l2n фазовых переменных и
добавлением к исходной системе (2.1) l2n дифференциальных уравнений в
граничных условиях интегральные слагаемые заменяются точечными. Да-
лее, полученная задача относительно системы дифференциальных уравне-
ний (l2 + 1)n-го порядка с (l1 + 2l2) промежуточными значениями фазовой
переменной в краевых условиях, в соответствии с методом, предложенным
в [26], за счет увеличения порядка системы дифференциальных уравнений в
(l1 +2l2) раз приводится к двухточечной задаче, для решения которой можно
использовать методы прогонки [26, 27]. Размерность полученной задачи по
сравнению с исходной в итоге увеличивается в (l1 + 2l2)(l2 + 1) раз. При этом
соответственно увеличатся порядки вспомогательных задач Коши, используе-
мых в методах прогонки для решения нелокальных краевых задач. Примене-
ние такого подхода для решения задач оптимального управления, учитывая
необходимость многократного решения прямой и сопряженной краевых за-
дач, как было показано в [22], неэффективно.
Возможен частный, но важный случай, когда A1(t) = const, t ∈ [t1, tf ]. То-
гда и фундаментальная матрица Φ(t, τ) = const, t ∈ [t1, tf ], и ее одноразовое
вычисление не требует больших вычислительных затрат и она занимает ма-
лый объем памяти в отличие от хранения фундаментальной матрицы неавто-
номной системы. В этом случае использование формулы Коши для решения
краевых задач (2.1), (2.2) при произвольно заданных допустимых управле-
ниях u(t) и параметрах ϑ приводит к одноразовому решению алгебраиче-
ской системы порядка n, получаемой из краевых условий, и задачи Коши с
использованием начального условия, полученного из алгебраической систе-
мы. Поэтому в случае автономных систем, т.е. A1(t) = const, использование
каких-либо схем метода прогонки при решении задач оптимального управле-
ния, требующих многократного решения краевых задач, неэффективно.
14
Задача. Приведем результаты численных экспериментов, полученные
при решении задачи оптимального управления, описываемой системой диф-
ференциальных уравнений
{x1(t) = 2x1(t)+x2(t)+u-6cos(8t)-22sin(8t)-4t2+4t+4,
(4.2)
t∈[0,1],
x2(t) = tx1(t)+x2(t)-(24-2t)cos(8t)-3sin(8t)-2t3 +t2 -1,
с нелокальными условиями
∫
x1(0) + x1(0,5) + x2(1) + (x1(t) + 2x2(t)) dt = ϑ1,
0,6
(4.3)
∫
(x1(t) - x2(t)) dt = ϑ2.
0,2
Имеются ограничения на оптимизируемые параметры:
-3 ≤ ϑ1 ≤ 3,
-2 ≤ ϑ2 ≤ 2,
-5 ≤ u(t) ≤ 5.
Целевой функционал имеет вид
∫1
[
(4.4) J(u, ϑ) =
[x1(t) + x2(t) - u(t)]2 dt + δ · (ϑ1 + 0,24)2 + (ϑ2 + 1,17)2 +
0
]
+ (x2(0,5) + 1,52)2 + (x1(1) + 0,29)2 + (x2(1) - 2,97)2 → min .
Здесь: l1 = 3, t1 = t1 = 0,
t2=0,5,tf= t3=1,l2 = 2, t1=0,2,
t2=0,4,
t3=0,6, t4=0,8,δ=0,01.
Сопряженная задача (3.28) имеет вид
ψ1(t) = -2ψ1(t) - tψ2(t) +
+ λχ[0,2, 0,4](t) + ψ1(0)χ[0,6, 0,8](t) + 2(x1(t) + x2(t) - u(t)),
(4.5)
ψ2(t) = -ψ1(t) - ψ2(t) -
- λχ[0,2, 0,4](t) + 2ψ1(0)χ[0,6, 0,8](t) + 2(x1(t) + x2(t) - u(t)).
В условиях (4.3) каждая из матриц
(
)
(
)
(
)
1
0
1
0
0
1
α1 =
,
α2 =
,
α3 =
0
0
0
0
0
0
имеет ранг, равный 1. Расширенная матрица
(
)
1
0
1
0
0
1
α=
0
0
0
0
0
0
15
тоже имеет ранг, равный 1. Это соответствует рассмотренному выше случаю
в теореме 4. Матрицу α составим из первого столбца и первой строки матри-
цы α1:
(
)
⌢
α
= (1),
α=
0
1
0
0
1
Это значит, что в формулах (3.29), (3.30) индексы (ki; si), i = 1, и (gν ; qν ),
ν = 1,2,3,4,5, имеют следующие значения:
(k1; s1) = (1; 1), (g1; q1) = (2; 1), (g2; q2) = (1; 2),
(g3; q3) = (2; 2), (g4; q4) = (1; 3), (g5; q5) = (2; 3).
Тогда для матриц B и C имеем:
(
)
α-1 α =
0
-1 0 0 -1
,
α-1 = (1).
Для элементов векторов∂Φ(x,x,ϑ),i = 1,2,3, имеем:
∂xi
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
=
= 0,
∂x1
∂xs1k1
1
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
=
= 0,
∂xg12
∂x1
2
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
=
= 0,
∂xg22
∂x2
1
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
=
= 2(x2(0,5) + 1,52),
∂xg33
∂x2
2
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
=
= 2(x1(1) + 0,29),
∂xg44
∂x3
1
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
=
= 2(x2(1) - 2,97),
∂xg55
∂x3
2
∂Φ(x, x,ϑ)
= 0, i = 1, 2, j = 1, 2, 3, 4.
∂xj
i
Тогда условия (3.29) и (3.30)
(
)
∂Φ(x, x,ϑ)
ν
)+b1ν
+
ψgν (tqν+ ) = ψgν (tq
-
+ ψk1(ts1- ) - ψk1(t+1)
∂xs1
k1
∂Φ(x, x,ϑ)
+
,
ν = 1,2,...,5,
∂xg
ν
ψi(tj+) = ψi(tj-) +∂Φ(x,x,ϑ),
i = 1,2, j = 1,2,3,4,
∂xj
i
16
примут вид:
ψ1(0) + ψ2(1) = -2(x2(1) - 2,97),
ψ2(0) = 0,
ψ1(1) = -2(x1(1) + 0,29),
(4.6)
ψ1(0,5+) = ψ1(0,5-) + ψ1(0),
ψ2(0,5+) = ψ2(0,5-) + 2(x2(0,5) + 1,52),
ψi(tj+) = ψi(tj-), i = 1,2, j = 1,2,3,4.
Компоненты градиента функционала по u(t) согласно формуле (3.5) опре-
деляются в виде
(4.7)
graduJ(u, ϑ) = -ψ1(t) - 2(x1(t) + x2
(t) - u(t)).
Компоненты градиента функционала по вектору ϑ согласно
формулам
(3.26), (3.27)
[
]
∂J(u,ϑ)
∂Φ(x, x,ϑ)
=
+ Δψk1(ts1 ) c11 + ∂Φ(x, x,ϑ)
+
∂ϑ(1)1
∂xs1k1
∂ϑ(1)
1
∫1
∂f0(x(t),u(t),ϑ,t)
+
dt,
∂ϑ(1)
1
0
1
∫
∂J(u,ϑ)
∂Φ(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
= -λ +
+
dt,
(2)
∂ϑ(2)2
∂ϑ
∂ϑ(2)
2
2
0
определяются так:
∂J(u,ϑ)
∂J(u,ϑ)
(4.8)
= -ψ1(0) + 2(ϑ1 + 0,24),
= -λ + 2(ϑ2
+ 1,17).
∂ϑ1
∂ϑ2
Итерационная процедура метода проекции градиента
(4.1) проводи-
лась с точностью по функционалу ε = 10-5 из разных начальных точек
(u(0)(t), ϑ(0)). Вспомогательные задачи Коши, используемые методом сдвига
условий [8] как для решения прямой (4.2)-(4.3), так и сопряженной (4.5)-(4.6)
задач, решались методом Рунге-Кутты четвертого порядка с различными
шагами h = 0,01, 0,02, 0,05.
Проводилось сравнение значений компонент градиента по параметрам ϑ,
вычисленных при заданном управлении u = u(t) по формуле (4.8) и с исполь-
зованием конечноразностной центральной схемы:
∂J(u,ϑ)
J (u, ϑ + εei) - J(u, ϑ - εei)
(4.9)
≈
,
i = 1,2,
∂ϑi
2ε
где векторы e1 = (1; 0), e2 = (0; 1).
17
Таблица 1. Значения функционала и нормированных градиентов функционала по
параметру ϑ, вычисленные в разных точках и шагах интегрирования
Значения
Значения нормированных градиентов
Значения
Шаг
№ параметров
функционала
h
(differ.)
ϑ(0)
grad(analyt.)ϑ,norm.J(u(0), ϑ(0)) grad
J (u(0), ϑ(0))
J (u(0), ϑ(0))
ϑ,norm.
1
(-0,125; 1,5) 0,05
(0,07271; 0,99735)
(0,05452; 0,99990)
390,43906819
0,02
(0,07273; 0,99735)
(0,05992; 0,99892)
392,72670193
0,01
(0,07273; 0,99735)
(0,06772; 0,99835)
397,30552111
2
(-1,5; 2,5)
0,05
(0,04705; 0,99889)
(0,03482; 0,99969)
669,16154749
0,02
(0,04706; 0,99889)
(0,03899; 0,99971)
672,12173718
0,01
(0,04707; 0,99889)
(0,04235; 0,99975)
678,04614524
Таблица 2. Начальные значения управления, фазовых переменных, нормированных
градиентов, вычисленных по предложенным формулам и по формуле (4.9)
t
u(0)(t) x(0)1(t)
x(0)2(t)
ψ(0)1(t)
ψ(0)2(t) grad(analyt.)u,norm.J grad(differ.)u,norm.J
0,00
2,0000
4,5015
-4,9825
-17,6713
0,0000
0,0328
0,0273
0,10
2,0100
4,2276
-3,4452
-14,7732
1,2205
0,0249
0,0193
0,20
2,0400
3,0911
-3,2437
-12,3997
2,0972
0,0243
0,0184
0,30
2,0900
2,1900
-4,8855
-32,9314
29,5948
0,0615
0,0626
0,40
2,1600
2,5457
-7,7654
-51,3018
59,2537
0,0956
0,1016
0,50
2,2500
4,4944
-10,5185
-63,5013
38,6945
0,1158
0,1024
0,60
2,3600
7,4976
-11,8338
-55,3290
39,1857
0,0994
0,0965
0,70
2,4900
10,4889
-11,2326
-50,5133
51,4172
0,0825
0,0817
0,80
2,6400
12,5467
-9,3378
-47,0810
62,2654
0,0665
0,0680
0,90
2,8100
13,4880
-7,4654
-42,9246
61,0030
0,0528
0,0557
1,00
3,0000
14,0259
-6,7815
-39,6537
59,8498
0,0451
0,0479
Таблица 3. Полученные на двадцатой итерации результаты решения задачи
Полученное решение
t
u(20)(t)
x(20)1(t)
x(20)2(t)
ψ(20)1(t)
ψ(20)2(t)
0,00
1,00029
0,00007
0,99999
0,00006
0,00000
0,10
2,55535
-0,58653
3,14206
0,00005
-0,00000
0,20
1,98011
-1,97840
3,95871
0,00008
0,00003
0,30
-0,35852
-3,29485
2,93638
0,00011
0,00002
0,40
-3,01165
-3,67667
0,66486
0,00010
-0,00003
0,50
-4,32748
-2,80734
-1,52043
0,00010
-0,00012
0,60
-3,45330
-1,10499
-2,34852
0,00004
-0,00017
0,70
-0,85264
0,53120
-1,38383
0,00003
-0,00018
0,80
1,97589
1,26644
0,70963
0,00006
-0,00015
0,90
3,40763
0,83674
2,57099
0,00009
-0,00011
1,00
2,67746
-0,29100
2,96806
0,00006
-0,00013
В табл. 1 приведены значения функционала J(u, ϑ) и нормированных ком-
понент градиента для разных точек ϑ и шагов интегрирования h, вычислен-
ные по аналитической формуле (4.8) grad(analyt.)ϑ,norm.J(u, ϑ) и разностной схеме
(4.9)
grad(differ.)ϑ,norm.J(u, ϑ), при u(t) = t2 + 2.
18
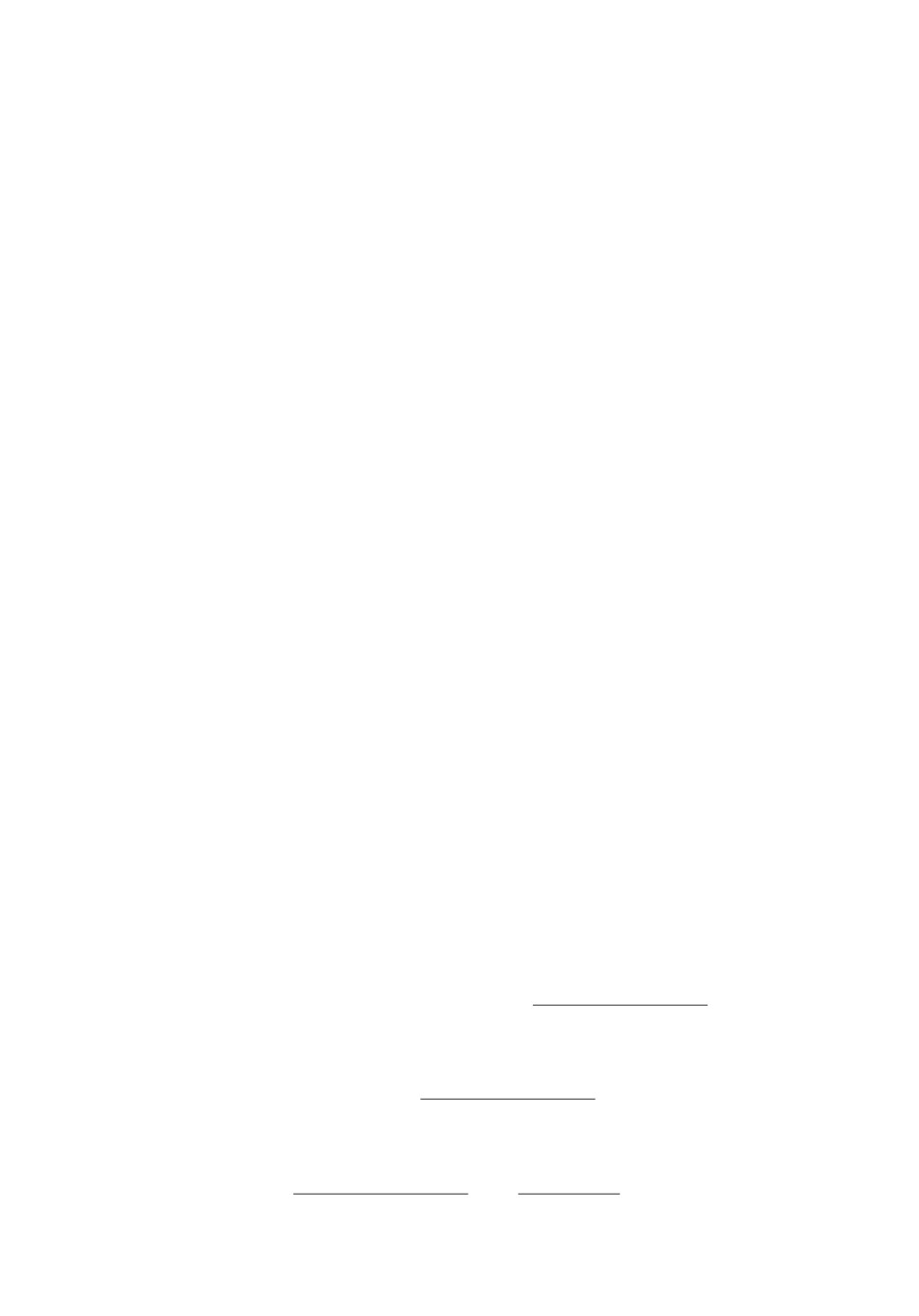
а
б
5
1,50E-04
4
1,00E-04
y1(t)
3
x2(t)
5,00E-05
2
1
0,00E+00
0,2
0,4
0,6
0,8
1,0 t
0
-5,00E-05
0,2
0,4
0,6
0,8
1,0 t
-1
-1,00E-04
-2
y2(t)
x1(t)
-1,50E-04
-3
-4
-2,00E-04
Графики полученных решений прямой (а) и сопряженной (б ) краевых задач.
В табл.
2
приведены величины эвклидовых норм градиента функ-
ционала graduJ(u) в моменты времени ti = 0,005i, i = 0, 1, . . . , 200, вы-
численные на первой итерации по аналитической формуле (4.7)
grad
u,norm. J = gradu,norm. J(u,ϑ) и разностной схеме (4.9) gradu,norm. J =
= gradu,norm. J(u,ϑ). В этой же таблице приведены результаты решения пря-
мой и сопряженной краевых задач при начальном управлении u0(t) = t2 + 2.
В табл. 2 и 3 приведены результаты, полученные при решении задачи при
числе разбиений временнóго интервала N = 200.
В табл. 3 приведены результаты, полученные на двадцатой итерации про-
цедуры (4.1). При этом значение функционала в начальной точке ϑ(0)1 =
= -0,125; ϑ(0)2 = 1,5; u0(t) = t2 + 2 было равно J(u(0),ϑ(0)) = 397,30552, а зна-
чение λ = -240,1465. На двадцатой итерации было получено значение функ-
ционала J(u(20), ϑ(20)) = 1,4 · 10-8, а значения параметров были следующими:
ϑ(20)1 = -0,2403, ϑ(20)2 = -1,1719, λ(20) = 0,0002.
На рисунке приведены графики полученных решений прямой (a) и сопря-
женной (б ) краевых задач.
5. Заключение
В статье исследована линейная задача оптимального управления динами-
ческим объектом, в которой оптимизируемыми кроме управляющих функ-
ций, участвующих в дифференциальных уравнениях, являются значения
правых частей линейных нелокальных краевых условий. Краевые условия
включают в себя в качестве слагаемых значения фазовой переменной в проме-
жуточных точках и интегральные значения фазовой переменной на несколь-
ких интервалах.
Исследованы условия существования и единственности решения краевой
задачи с неразделенными краевыми условиями, выпуклость целевого функ-
ционала задачи. Применением техники методов Лагранжа и условного гра-
диента сформулированы необходимые условия оптимальности.
Полученные результаты могут быть использованы в исследовании за-
дач управления, описываемых нелинейными системами дифференциальных
уравнений с линейными неразделенными краевыми условиями, включающи-
ми точечные и интегральные значения фазовых переменных и оптимизируе-
мые правые части.
19
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Доказательство теоремы проводится
непосредственной подстановкой формулы Коши относительно системы (2.1)
∫t
(Π.1)
x(t) = F (t, t1)x1 + F (t, τ)A2
(τ)u(τ)dτ
t1
в условия (2.2). После несложных преобразований и группировки получим
алгебраическую систему относительно x1 = x(t1):
(Π.2)
Lx1
= D,
∫
∑
∑
L = αiF(ti,t1) +
βj(t)F(t,t1)dt,
i=1
j=1 t2j-1
ti
t
∫
∫
∫
∑
∑
D = ϑ - αi F(ti,τ)A2(τ)u(τ)dτ -
βj(t) A2(τ)u(τ)dτdt.
i=1
t1
j=1 t2j-1
t1
Известно, что система уравнений (П.2) имеет решение, причем единствен-
ное, если матрица L обратима, т.е. при выполнении условия (3.1). Ясно,
что rankL не зависит от значений вектора D, а следовательно, не зависит
от вектор-функции u(t) и вектора ϑ. А из-за единственности представления
(П.1) для решения задачи Коши относительно системы (2.1) и задача (2.1),
(2.2) имеет решение, причем единственное, при выполнении условия (3.1).
Теорема 1 доказана.
Доказательство теоремы 2. Пусть (u1,ϑ1) и (u2,ϑ2) две пары
произвольных допустимых управления и параметров, а x1(t) и x2(t) соот-
ветствующие им решения краевой задачи (2.1), (2.2). Тогда
(Π.3)
x1(t) = A1(t)x1(t) + A2(t)u1(t), t ∈ [t1,tf
],
∫
∑
∑
(Π.4)
αix1(ti) +
βj(t)x1(t)dt = ϑ1,
i=1
j=1 t2j-1
(Π.5)
x2(t) = A1(t)x2(t) + A2(t)u2(t), t ∈ [t1,tf
],
∫
∑
∑
(Π.6)
αix2(ti) +
βj(t)x2(t)dt = ϑ2.
i=1
j=1 t2j-1
В силу выпуклости допустимых множеств U и V для произвольного σ ∈
∈ [0; 1] имеет место:
(Π.7)
u(t) = σu1(t) + (1 - σ)u2(t) ∈ U, ϑ = σϑ1 + (1 - σ)ϑ2
∈ V.
20
Обозначим x(t) = σx1(t) + (1 - σ)x2(t).
Умножим обе части (П.3) на σ, а (П.5) на (1- σ), полученные равенства
почленно сложим и сгруппируем:
σ x1(t) + (1 - σ) x2(t) =
[
]
[
]
= A1(t)
σx1(t) + (1 - σ)x2(t)
+ A2(t)
σu1(t) + (1 - σ)u2(t)
Отсюда следует, что x(t) удовлетворяет системе дифференциальных уравне-
ний (2.1).
Умножая обе части (П.4) на σ, а (П.6) на (1-σ), складывая полученные
равенства, после группировки получим:
∑
[
]
αi
σx1(ti) + (1 - σ)x2(ti)
+
i=1
∫
∑
[
]
+
βj(t)
σx1(t) + (1 - σ)x2(t)
dt = σϑ1 + (1 - σ)ϑ2.
j=1 t2j-1
Учитывая обозначения (П.7), отсюда следует, что тройка (x(t), u(t), ϑ) удов-
летворяет условиям (2.2).
В силу выпуклости функций f0(x(t), u(t), ϑ, t) и Φ(x, x, ϑ) по аргументам
x, x, x,u,ϑ, имеем:
(
)
(Π.8)
J (u, ϑ) = J σu1(t) + (1 - σ)u2(t), σϑ1 + (1 - σ)ϑ2
=
∫tf
(
)
= f0 σx1(t) + (1 - σ)x2(t),σu1(t) + (1 - σ)u2(t),σϑ1 + (1 - σ)ϑ2 dt +
t1
(
)
+ Φ σx1 + (1 - λσ)x2,σx1 + (1 - λσ)x2,σϑ1 + (1 - σ)ϑ2
≤
tf
∫tf
(
)
∫
(
)
≤ σ f0 x1(t),u1(t),ϑ1 dt + (1 - σ) f0 x2(t),u2(t),ϑ2 dt +
t1
t1
(
)
(
)
+ σΦ x1, x1,ϑ1
+ (1 - σ)Φ x2, x2, ϑ2
=
(
)
(
)
= σJ u1,ϑ1
+ (1 - σ)J u2, ϑ2 .
Отсюда следует выпуклость функционала J(u, ϑ). Ясно, что если одна из
функций Φ(x, x, ϑ), f0(x(t), u(t), ϑ, t) будет строго выпуклой, то знак неравен-
ства в (П.8) будет строгим. Следовательно, и функционал задачи (2.1)-(2.3)
будет строго выпуклым. Отсюда следует справедливость утверждения теоре-
мы. Теорема 2 доказана.
21
Доказательство теоремы
3.
Пусть x(t) ∈ Rn является реше-
нием краевой задачи (2.1), (2.2) при некоторых допустимых управлении
u(t) ∈ U, векторе параметров ϑ ∈ V , а x1(t) = x(t) + Δx(t) решение задачи
(2.1), (2.2), соответствующее приращенным допустимым управлению u1(t) =
= u(t) + Δu(t) ∈ U и вектору ϑ1 = ϑ + Δϑ ∈ V :
(Π.9)
x1(t) = A1(t)x1(t) + A2(t)u1(t), t ∈ [t1,tf
],
∫
∑
∑
(Π.10)
αix1(ti) +
βj(t)x1(t)dt = ϑ1.
i=1
j=1 t2j-1
Из (2.1), (2.2) и (П.9), (П.10) следует, что имеет место:
(Π.11)
Δ x(t) = A1(t)Δx(t) + A2(t)Δu(t), t ∈ [t1,tf
],
∫
∑
∑
(Π.12)
αiΔx(ti) +
βj
(t)Δx(t)dt = Δϑ.
i=1
j=1 t2j-1
Тогда для приращения функционала (2.3) имеем
(Π.13)
ΔJ(u,ϑ) = J(u1,ϑ1
) - J(u,ϑ) =
∫tf
[
]
=
f0(x1(t),u1(t),ϑ1,t) - f0(x(t),u(t),ϑ,t) dt + Φ(x1, x1,ϑ1) - Φ(x, x,ϑ) =
t1
∫tf
[∂f0(x(t),u(t),ϑ,t)
∂f0(x(t),u(t),ϑ,t)
=
Δx(t) +
Δu(t) +
∂x
∂u
t1
]
∂f0(x(t), u(t), ϑ, t)
+
Δϑ dt +
∂ϑ
∑
∑
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
+
Δx(ti) +
Δx(tj) +∂Φ(x,x,ϑ)Δϑ + R,
∂xi
∂xj
∂ϑ
i=1
j=1
(
)
R = o ∥Δx(t)∥C1,n[t1,tf] ,∥Δu(t)∥Lr
[t1,tf ]
,∥Δϑ∥Rn
2
Здесь R является остаточным членом. При принятых предположениях на
данные задачи (2.1), (2.2), пользуясь известной техникой [24], можно полу-
чить оценку вида
∥Δx(t)∥C1,n[t1,tf] ≤ c1 ∥Δu(t)∥Lr
+ c2 ∥Δϑ∥Rn ,
2
[t1,tf ]
где положительные c1, c2 не зависят от x(t). Отсюда с учетом (П.13) следует
дифференцируемость функционала J(u, ϑ) как по u(t), так и по ϑ.
22
Объединим и упорядочим множества точек ti, i = 1, 2, . . . , l1, и tj , j =
= 1, 2, . . . , 2l2, обозначая полученный набор точек через
ts, s = 1, 2, . . .
...,(l1 + 2l2).
Перенесем правую часть (П.11) влево, умножим слева скалярно обе ча-
сти полученного равенства на пока произвольную непрерывно дифферен-
цируемую на интервалах (ti, ti+1), i = 1, 2, . . . , (l1 + 2l2 - 1), n-мерную век-
тор-функцию ψ(t). Интегрируя по частям полученное равенство и используя
обозначения
ψ(ti+) = lim
ψ(ti + ε), ψ(ti-) = lim
ψ(ti - ε),
ε→+0
ε→+0
получим:
∫tf
[
]
0 = ψT(t) Δx(t) - A1(t)Δx(t) - A2(t)Δu(t) dt =
t1
∫
∑
[
]
=
ψT(t)Δ x(t) - ψT(t)A1(t)Δx(t) - ψT(t)A2(t)Δu(t)
dt =
i=1
ti
∫tf
[
]
= ψT(tf)Δx(tf) - ψT(t1)Δx(t1) +
- ψT(t) - ψT(t)A1(t) Δx(t)dt +
t1
∫tf
[
]
∑
[
]T
+
− ψT(t)A2(t) Δu(t)dt +
ψ(ti-) - ψ(ti+)
Δx(ti) +
i=2
t1
∑[
]T
+
ψ(tj-) - ψ(tj+)
Δx(tj).
j=1
Прибавив к (П.13) полученное выражение, равное нулю, после несложных
преобразований будем иметь:
∫tf
[
]
(Π.14)
ΔJ(u,ϑ) =
- ψT(t) - ψT(t)A1(t) + ∂f0(x(t),u(t),ϑ,t)
Δx(t)dt +
∂x
t1
∫tf
[
]
∂f0(x(t),u(t),ϑ,t)
+
-ψT(t)A2(t) +
Δu(t)dt +
∂u
t1
∫tf
∂f0(x(t),u(t),ϑ,t)
∂Φ(x, x,ϑ)
+
dt +
Δϑ +
∂ϑ
∂ϑ
t1
23
∑
∑
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
+
Δx(ti) +
Δx(tj) + ψT(tf)Δx(tf ) -
∂xi
∂xj
i=1
j=1
∑
[
]T
- ψT(t1)Δx(t1) +
ψ(ti-) - ψ(ti+)
Δx(ti) +
i=2
[
]T
∑
+
ψ(tj-) - ψ(tj+)
Δx(tj)
+ R.
j=1
Займемся слагаемыми, находящимися внутри фигурной скобки.
В (П.14) используем условия (П.12) для получения зависимости каких-ли-
бо n компонент (nl1)-мерного вектора
(
)
Δx(t) = Δx = Δx1(t1),Δx2(t1),... ,Δxn(t1),... ,Δxi(tj),... ,Δxn(tl1 ) ,
через остальные n(l1 - 1) компонент.
Далее для простоты изложения технических деталей совместно с матрич-
ными операциями будем использовать покомпонентные записи формул.
Тогда соотношение (П.12) можно записать в виде:
∫
∑
⌢
α
x + αΔx +
βj(t)Δx(t)dt = Δϑ.
j=1 t2j-1
Отсюда, учитывая (3.2), имеем
∫
∑
⌢
(Π.15)
α-1 αΔx -
α
−1βj
(t)Δx(t)dt.
j=1 t2j-1
α-1 α, (П.15) примет
вид
∫
∑
⌢
(Π.16)
x = CΔϑ + BΔx -
α
−1βj
(t)Δx(t)dt
j=1 t2j-1
или в покомпонентной форме:
∑
∑
(Π.17)
xi = Δxki(tsi) =
cikΔϑk + biνΔxgν (tqν
)-
k=1
ν=1
∫
∑∑
⌢
-
α
−1βjik(t)Δxk(t)dt, i = 1,2,... ,n,
1 ≤ gν ≤ n.
j=1 k=1 t2j-1
24
Шестое и седьмое слагаемые в (П.14) запишем так:
∑
∑
ψT(tf )Δx(tf) =
ψj(tf)Δxj(tf ), ψT(t1)Δx(t1) =
ψj(t1)Δxj(t1).
j=1
j=1
Объединяя в (П.14) четвертое и восьмое слагаемые и учитывая (П.17),
получим:
[
]
∑
∂Φ(x, x,ϑ)
+ Δψj(ti) Δxj(ti) =
j
∂x
i=1 j=1
i
[
]
∑
∂Φ(x, x,ϑ)
=
+ Δψki(tsi ) Δxk
(tsi) +
i
∂xsi
i=1
ki
[
]
]
∑
∑
[∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
+
+ Δψgν(tqν ) Δxgν (tqν ) =
si
+ Δψki(tsi)
×
∂xg
∂x
ν
ki
ν=1
i=1
∫
∑
∑
∑∑
⌢
×
α
−1βjik(t)Δxk(t)dt +
cikΔϑk + biν Δxgν (tqν ) -
k=1
ν=1
j=1 k=1ˆ
t2j-1
]
∑
[∂Φ(x, x,ϑ)
+
+ Δψgν(tqν ) Δxgν (tqν ).
∂xg
ν
ν=1
Из (П.14) с учетом полученного соотношения имеем:
∫tf
[
(Π.18)
ΔJ(u,ϑ) =
- ψT(t) - ψT(t)A1(t) + ∂f0(x(t),u(t),ϑ,t)
-
∂x
t1
(
)
∑
∂Φ(x, x,ϑ)
∑
-
+ Δψki(tsi )
α-1βj(t) Δx(t)dt +
∂xsi
i=1
ki
j=1
∫tf
[
]
∂f0(x(t),u(t),ϑ,t)
+
-ψT(t)A2(t) +
Δu(t)dt +
∂u
t1
(
)
∑
∑
∂Φ(x, x,ϑ)
+
+ Δψki(tsi) cik + ∂Φ(x, x,ϑ) +
∂ϑk
∂xsiki
k=1
i=1
∫tf
∂f0(x(t),u(t),ϑ,t)
+
dt Δϑk +
∂ϑk
t1
25
[
(
)
∑
∑
∂Φ(x, x,ϑ)
+
biν
+ Δψki(tsi)
+
si
∂x
ν=1
i=1
ki
]
(
)
∂Φ(x, x,ϑ)
+
+ Δψgν(tqν ) Δxgν (tqν ) +
∂xg
ν
[
]
∑∑
∂Φ(x, x,ϑ)
+
+ Δψi(tj) Δxi(tj) + R.
j
∂x
j=1 i=1
i
В силу произвольности вектор-функции ψ(t) потребуем, чтобы выражения
в первой и в двух последних квадратных скобках (П.18) были равны нулю.
Из первого требования получим сопряженную систему дифференциальных
уравнений (3.7), а из других двух требований получим выражения:
[
]
∑
∂Φ(x, x,ϑ)
biν
+ Δψki(tsi )
+
∂xsi
i=1
ki
[
]
∂Φ(x, x,ϑ)
+
+ Δψgν(tqν )
= 0, ν = 1, 2, . . . , l1n,
∂xg
ν
∂Φ(x, x,ϑ)
+ Δψi(tj) = 0, i = 1,2,... ,n, j = 1,2,... ,2l2.
∂xj
i
Отсюда следуют условия (3.8), (3.9).
Тогда искомые компоненты градиента функционала по u(t) и ϑ будут опре-
деляться из (П.18) как линейные части приращения функционала при Δu(t)
и Δϑ формулами (3.5), (3.6).
Таким образом, теорема 3 доказана.
Доказательство теоремы 4. Займемся условиями оптимальности
пары (u, ϑ) при замененных условиях (2.2) на условия (3.3), (3.4). В отличие
от приведенных выше выкладок для случая n = n, далее для учета усло-
вий (3.4) будет использован метод Лагранжа и введен (n - n)-мерный допол-
нительный вектор параметров множителей Лагранжа.
Снова, используя метод приращения оптимизируемых параметров (u, ϑ),
для приращения функционала получим формулу (П.6). Условие (3.4) в при-
ращениях примет вид
∫
∑
(Π.19)
β2j(t)Δx(t)dt = Δϑ(2).
j=1 t2j-1
Перенесем все члены в (П.19) влево, умножим полученное выражение на
пока произвольный вектор λ ∈ Rn-n и прибавим к (П.14). Для приращения
26
функционала получим:
∫tf
(Π.20)
ΔJ(u,ϑ) =
-ψ˙T(t)-ψT(t)A1(t) +∂f0(x(t),u(t),ϑ,t)
-
∂x
t1
∑
- λT χ[ˆt2j-1,t2j](t)βj(t)Δx(t)dt +
j=1
∫tf
[
]
∂f0(x(t),u(t),ϑ,t)
+
-ψT(t)A2(t) +
Δu(t)dt +
∂u
t1
∫tf
∂f0(x(t),u(t),ϑ,t)
∂Φ(x, x,ϑ)
+
dt +
Δϑ(1) +
∂ϑ(1)
∂ϑ(1)
t1
∫tf
∂f0(x(t),u(t),ϑ,t)
∂Φ(x, x,ϑ)
+
dt +
- λT Δϑ(2) +
∂ϑ(2)
∂ϑ(2)
t1
∑
∑
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
Δx(ti) +
Δx(tj) + ψT(tf )Δx(tf ) -
+
∂xi
∂xj
i=1
j=1
∑
[
]T
- ψT(t1)Δx(t1) +
ψ(ti-) - ψ(ti+)
Δx(ti) +
i=2
∑[
]T
+
ψ(tj-) - ψ(tj+)
Δx(tj)
+ R.
j=1
Займемся слагаемыми, находящимися внутри фигурных скобок, учиты-
вая, что ранг расширенной матрицы α = [α1, α2, . . . , αl1 ] в условиях (3.3) ра-
вен n. Из выражения в приращениях
∫
∑
∑
αiΔx(ti) +
β1j(t)Δx(t)dt = Δϑ(1),
i=1
j=1 t2j-1
полученного из (3.3), выразим какие-либо n компонент nl1-мерного вектора
Δx(t) через остальные nl1 - n компонент. Как это было сделано выше, вы-
α размера n × n. Пусть
оставшиеся nl1 - n столбцов матрицы α образуют матрицу α. Соответствую-
x(t), оставшиеся
27
элементы образуют вектор Δx(t). Тогда имеем:
∫
∑
α-1
β1j(t)Δx(t)dt,
j=1 t2j-1
∫
∑
⌢
x = CΔϑ + BΔx -
α
−1β(1)j(t)Δx(t)dt
j=1 t2j-1
или в покомпонентной форме:
∑
∑
(Π.21)
xi = Δxki(tsi) =
cikΔϑk +
biνΔxgν (tqν
)-
k=1
ν=1
∫
∑∑
⌢
-
α
−1β(1)jik(t)Δxk(t)dt, i = 1,2,... , n,
1 ≤ gν ≤ n.
j=1 k=1 t2j-1
Учитывая (П.21), в (П.20) получим:
∫tf
(Π.22)
ΔJ(u,ϑ) =
-ψ˙T(t)-ψT(t)A1(t) +∂f0(x(t),u(t),ϑ,t)
-
∂x
t1
∑
- λT χ[ˆt2j-1,t2j](t)βj(t) +
j=1
(
(
))
∑
∂Φ(x, x,ϑ)
+
))T
×
+ (ψki (tsi-) - ψki (t+i
∂xsi
i=1
ki
∑
α-1β1j(t) Δx(t)dt +
j=1
∫tf
[
]
∂f0(x(t),u(t),ϑ,t)
+
-ψT(t)A2(t) +
Δu(t)dt +
∂u
t1
[
]
∑
∑
∂Φ(x, x,ϑ)
+
+ Δψki(tsi) cik +
∂xsi
k=1
i=1
ki
tf
∫
∂Φ(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
1)
+
+
dt Δϑ(
+
k
∂ϑ(1)
∂ϑ(1)
k
k
t1
28
∫
tf
∑
∂Φ(x, x,ϑ)
∂f0(x(t),u(t),ϑ,t)
2)
+
-λk +
+
dt Δϑ(
+
(2)
(2)
k
∂ϑ
∂ϑ
k=1
k
k
t1
[
(
)
∑
∑
∂Φ(x, x,ϑ)
+
biν
si
+ Δψki(tsi)
+
∂x
ν=1
i=1
ki
(
)]
∂Φ(x, x,ϑ)
+
+ Δψgν(tqν ) Δxgν (tqν ) +
∂xg
ν
[
]
∑∑
∂Φ(x, x,ϑ)
+
+ Δψi(tj) Δxi(tj) + R.
j
∂x
j=1 i=1
i
В силу произвольности вектор-функции ψ(t) и вектора λ потребуем от
них, чтобы выражение в первой квадратной скобке (П.22) было равно нулю,
откуда получим сопряженное дифференциальное уравнение (3.28). А в силу
произвольности компонент остаточного вектора Δx(t) и приращений Δx(ti),
j = 1,2,...,2l2, потребуем, чтобы выражения в двух последних квадратных
скобках (П.22) были равны нулю:
[
]
[
]
∑
∂Φ(x, x,ϑ)
∂Φ(x, x,ϑ)
biν
+ Δψki(tsi) +
+ Δψgν(tqν )
= 0,
∂xsi
∂xg
ki
ν
i=1
ν = 1,2,...,(l1n - n),
∂Φ(x, x,ϑ)
+ Δψi(tj) = 0, i = 1,2,... ,n, j = 1,2,... ,2l2.
∂xj
i
Отсюда получим краевые условия (3.29)-(3.30) для сопряженного уравнения
(3.28).
Из (П.22) ясно, что формула для градиента функционала по u(t) будет
такой же, как в (3.5), а компоненты градиента по ϑ определяются формулами
(3.26), (3.27). Таким образом, теорема 4 доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Nicoletti О. Sulle condizioni iniziali che determiniano gli integrali della diffenziali
ordinazie. Atti della R. Acc. Sc. Torino, 1897.
2. Тамаркин Я.Д. О некоторых общих задачах теории обыкновенных дифференци-
альных уравнений и о разложении произвольных функций в ряды. Петроград,
1917.
3. De la Vallee-Poussin, Ch.J. Sur l’équation différentielle linéare du second ordre.
Détermination d’une integrale par deux valeurs assignées. Extension aux équations
d’orde n // J. Math. Pures Appl. 1929. V. 8. No. 9.
4. Кигурадзе И.Т. Краевые задачи для систем обыкновенных дифференциальных
уравнений // Итоги науки и техники. Совр. проблемы математики. Нов. дости-
жения. 1987. Т. 30. С. 3-103.
29
5.
Нахушев А.М. О нелокальных краевых задачах со смещением и их связи с на-
груженными уравнениями // Дифференц. уравнения. 1995. Т. 21. № 1. С. 92-101.
6.
Dzhumabaev D.S., Imanchiev A.E. The Correct Solvability of a Linear Multipoint
Boundary Value Problem // Math. J. 2005. V. 5. No. 15. P. 30-38.
7.
Асанова А.Т., Иманчиев А.Е., Кадирбаева Ж.М. О разрешимости нелокальной
задачи для системы дифференциальных уравнений соболевского типа с много-
точечным условием // Изв. вузов. Матем. 2019. № 12. C. 3-15.
8.
Aida-zade K.R., Abdullaev V.M. On the Solution of Boundary Value Problems with
Nonseparated Multipoint and Integral Conditions // Diff. Equations. 2013. V. 49.
No. 9. P. 1114-1125.
9.
Abdullaev V.M., Aida-zade K.R. Numerical Method of Solution to Loaded Nonlocal
Boundary Value Problems for Ordinary Differential Equations // Comput. Math.
Math. Phys. 2014. V. 54. No. 7. P. 1096-1109.
10.
Assanova A.T. Solvability of a Nonlocal Problem for a Hyperbolic Equation with
Integral Conditions // Electr. J. Differ. Equat. 2017. V. 170. P. 1-12.
11.
Айда-заде К.Р., Абдуллаев В.М. Об одном подходе к синтезу управления про-
цессами с распределенными параметрами // АиТ. 2012. Т. 73. № 9. С. 3-19.
Aida-zade K.R., Abdullaev V.M. On an Approach to Designing Control of the
Distributed-Parameter Processes // Autom. Remote Control. 2012. V. 73. No. 9.
P. 1443-1455.
12.
Айда-заде К.Р., Абдуллаев В.М. Оптимизация размещения точек контроля при
синтезе управления процессом нагрева // АиТ. 2017. Т. 78. № 9. С. 49-66.
Aida-zade K.R., Abdullayev V.M. Optimizing Placement of the Control Points at
Synthesis of the Heating Process Control // Autom. Remote Control. 2017. V. 78.
No. 9. P. 1585-1599.
13.
Айда-заде К.Р., Гашимов В.А. Оптимизация размещения точек контроля в од-
ной задаче синтеза граничного управления процессом нагрева стержня // АиТ.
2018. Т. 79. № 9. С. 122-142.
Aida-zade K.R., Hashimov V.A. Optimization of Measurement Points Positioning in
a Border Control Synthesis Problem for the Process of Heating a Rod // Autom.
Remote Control. 2018. V. 79. P. 1643-1660.
14.
Mardanov M.J., Sharifov Y.A., Zeynalli F.M. Existence and Uniqueness of the Solu-
tions to Impulsive Nonlinear Integro-Differential Equations with Nonlocal Boundary
Conditions // Proc. Institute of Mathematics and Mechanics, National Academy of
Sciences of Azerbaijan. 2019. V. 45. No. 2. P. 222-232.
15.
Sharifov Y.A., Mammadova N.B. Optimal Control Problem Described by Impul-
sive Differential Equations with Nonlocal Boundary Conditions // Differ. Equations.
2014. V. 50. No. 3. P. 403-411.
16.
Devadze D., Beridze V. Optimality Conditions and Solution Algorithms of Opti-
mal Control Problems for Nonlocal Boundary-Value Problems // J. Math Sci. 2016.
V. 218. P. 731-736.
17.
Зубова С.П., Раецкая Е.В. Алгоритм решения линейных многоточечных задач
управления методом каскадной декомпозиции // АиТ. 2017. Т. 78. № 7. С. 22-38.
Zubova S.P., Raetskaya E.V. Algorithm to solve linear multipoint problems of control
by the method of cascade decomposition // Autom. Remote Control. 2017. V. 78.
No. 7. P. 1189-1202.
18.
Дмитрук А.В., Каганович А.М. Принцип максимума для задач оптимального
управления с промежуточными ограничениями // В сб. “Нелинейная динамика
и управление”. М: Физматлит, 2008. Вып. 6. С. 101-136.
30
19. Брайсон А., Хо Ю-Ши. Прикладная теория оптимального управления. М.: Мир,
1972.
20. Ащепков Л.Т. Оптимальное управление системой с промежуточными условия-
ми // Прикл. матем. механика. 1981. Т. 45. Вып. 2. C. 215-222.
21. Васильева О.О., Мизуками К. Динамические процессы, описываемые краевой
задачей: необходимые условия оптимальности и методы решения // Изв. РАН.
Теория и системы управления. 2000. № 1. С. 95-100.
22. Абдуллаев В.М., Айда-заде К.Р. Подход к численному решению задач опти-
мального управления нагруженными дифференциальными уравнениями с нело-
кальными условиями // Журн. вычисл. матем. и матем. физ. 2019. Т. 59. № 5.
С. 739-751.
23. Поляк Б.Т. Введение в оптимизацию. М.: Ленанд, 2019.
24. Васильев Ф.П. Методы оптимизации. М.: Факториал, 2002. C. 824.
25. Aida-zade K.R., Abdullayev V.M. Solution to a Class of Inverse Problems for System
of Loaded Ordinary Differential Equations with Integral Conditions // J. Inverse Ill-
Posed Probl. 2016. V. 24. No. 5. P. 543-558.
26. Moszynski K. A Method of Solving the Boundary Value Problem for a System of
Linear Ordinary Differential Equation // Algorytmy. Varshava. 1964. V.11. № 3.
P. 25-43.
27. Абрамов А.А. Вариант метода прогонки // Журн. вычисл. матем. и математ.
физ. 1961. Т. 1. № 2. С. 349-352.
Статья представлена к публикации членом редколлегии М.М. Хрусталевым.
Поступила в редакцию 19.07.2020
После доработки 28.09.2020
Принята к публикации 28.10.2020
31