Автоматика и телемеханика, № 3, 2021
Нелинейные системы
© 2021 г. И.Б. ФУРТАТ, д-р техн. наук (cainenash@mail.ru)
(Институт проблем машиноведения РАН, Санкт-Петербург),
П.А. ГУЩИН, канд. техн. наук (guschin.p@mail.ru)
(Губкинский университет, Москва)
ДИСКРЕТНОЕ ПО ПРОСТРАНСТВЕННОЙ ПЕРЕМЕННОЙ
УПРАВЛЕНИЕ СКАЛЯРНЫМИ ЛИНЕЙНЫМИ
РАСПРЕДЕЛЕННЫМИ ОБЪЕКТАМИ ПАРАБОЛИЧЕСКОГО
И ГИПЕРБОЛИЧЕСКОГО ТИПОВ1
Предложен дискретный по пространственной переменной закон управ-
ления некоторым классом систем, которые описываются скалярными ли-
нейными дифференциальными уравнениями параболического и гипербо-
лического типов с неизвестными параметрами и возмущениями. Доступно
конечное множество дискретных измерений (по пространственной пере-
менной) состояния объекта. Закон управления зависит от функции, ко-
торая зависит от пространственной переменной и от конечного набора
измерений состояния объекта. Приведены примеры данной функции, ко-
торая позволяет реализовать управляющий сигнал лишь на отдельных
интервалах по пространственной переменной и обеспечивать меньшие за-
траты на управление по сравнению с некоторыми другими аналогами.
Доказана экспоненциальная устойчивость замкнутой системы и робаст-
ность по отношению к интервально неопределенным параметрам объек-
та и внешним ограниченным возмущениям. Численные примеры моде-
лирования подтвердили результаты расчетов и показали эффективность
предложенного алгоритма по сравнению с некоторыми существующими
аналогами.
Ключевые слова: статический закон управления, линейное дифференци-
альное уравнение в частных производных, функционал Ляпунова, линей-
ное матричное неравенство, экспоненциальная устойчивость.
DOI: 10.31857/S0005231021030041
1. Введение
В статье рассматривается некоторый класс линейных дифференциаль-
ных уравнений параболического и гиперболического типов с распределен-
ным управлением. Такие уравнения могут описывать, например, конвекци-
онно-дифузионные процессы, вращающуюся стойку компрессора с приводом
впрыска воздуха, распространение тепла в стержне, колебание струны и т.д.
1 Результаты раздела 3 получены при поддержке Российского научного фонда (проект
№ 18-79-10104) в ИПМаш РАН. Результаты разделов 4 и 5 получены при поддержке Рос-
сийского фонда фундаментальных исследований (проект № 19-08-00246) в ИПМаш РАН.
Результаты разделов 6 и 7 получены при поддержке гранта Президента РФ (проект № МД-
1054.2020.8) в ИПМаш РАН.
77
Реализуемое конечномерное управление с использованием преобразования
Фурье и метода Галеркина рассмотрено в публикациях [1-3]. Для линейных
параболических систем в [4] предложен метод управления, основанный на
движущихся датчиках и актуаторах вдоль пространственной координаты.
В [5, 6] для подобных систем предложено адаптивное управление с использо-
ванием процедуры бэкстеппинга, которое достаточно трудоемко в расчете и
реализации.
В отличие от [1-6] в настоящей статье будет предложен способ формиро-
вания закона управления с использованием дискретизации сигнала измере-
ния по пространственной переменной. Для конечномерных систем подобный
подход изучался в течение нескольких последних десятилетий в качестве дис-
кретизации по уровню измеряемого сигнала [7-10] и др. В отличие от непре-
рывного управления, такое дискретное управление не учитывает поведение
объекта между выборками, зато в ряде случаев оно позволяет решить ряд
технических задач: управление через цифровые каналы связи, управление
с ограничением на информационные каналы связи и т.п. В данной статье
дискретизация по пространственной переменной позволит получить реали-
зуемый сигнал управления.
Наблюдаемость систем с дискретными пространственными измерения-
ми изучена в [11]. Дискретное по пространственной переменной управле-
ние бесконечномерными системами рассмотрено, например, в [12-15]. Мето-
ды [12, 13] неприменимы к неизвестным параметрам системы и не содержат
количественного анализа устойчивости замкнутой системы и скорости схо-
димости решений. В отличие от [12, 13] в [14, 15] предложен метод управ-
ления системами параболического типа с неизвестными параметрами с ис-
пользованием линейных матричных неравенств (ЛМН) для анализа экспо-
ненциальной устойчивости. Однако решения [12-15] не учитывают наличие
возмущений.
В настоящей статье, как и в [12-15], будет предложен метод управле-
ния с дискретизацией по пространственной переменной. Однако, в отличие
от [12-15], предложенный закон управления позволит формировать различ-
ные конфигурации регулируемого сигнала по пространственной переменной.
Например, по сравнению с [14, 15] предложенный закон управления не тре-
бует своей реализации по всей пространственной переменной, а стабилиза-
ция объекта может осуществляться с меньшими затратами на регулируе-
мый сигнал. В отличие от [12-15] будет показана экспоненциальная устой-
чивость замкнутой системы для систем параболического и гиперболическо-
го типов в условиях возмущений с использованием ЛМН. Будут приведены
численные примеры моделирования и сравнительный анализ эффективности
предложенного алгоритма с решением [14, 15] для систем параболического
типа.
В статье используются следующие обозначения: Rn евклидово простран-
ство размерности n с нормой | · |; Rn×m множество всех n × m веществен-
ных матриц; P > 0 и P ∈ Rn×n означает, что P
симметрическая поло-
жительно определенная матрица; симметричные элементы симметрической
матрицы будут обозначаться ∗. Непрерывно дифференцируемые функции по
всем аргументам будут обозначаться как функции класса C1. Нижние индек-
78
∂2z
сы обозначают частные производные zξ =∂z
и zξξ =
. L2(0,l)
гильбер-
∂ξ
∂ξ2
тово пространство с квадратично интегрируемыми функциями z(ξ), ξ ∈ [0, l]
∫l
с соответствующей нормой ∥z∥2L2 =
z2(s)ds. H1(0,l)
пространство Со-
0
болева абсолютно непрерывных скалярных функций z : [0, l] → R с нормой
∫l
∥z∥2H1 =
z2s(s)ds и zξ ∈ L2(0,l). H2(0,l)
пространство Соболева скаляр-
0
ных функций z : [0, l] ∈ R с абсолютно непрерывными производными zξ, нор-
∫l
мой ∥z∥2H2 =
z2ss(s)ds и zξξ ∈ L2(0,l).
0
2. Постановка задачи
2.1. Модели объектов
1. Пусть первый класс исследуемых объектов описывается скалярным ли-
нейным дифференциальным уравнением параболического типа
zt(x,t) = a1zxx(x,t) + a2zx(x,t) + φz(x,t) + u(x,t) + f(x,t),
(1)
x ∈ [0, l], l > 0,
с граничными условиями Дирихле
(2)
z(0, t) = z(l, t) = 0
или смешанными граничными условиями
(3)
zx
(0, t) = γz(0, t), z(l, t) = 0, γ ≥ 0.
Здесь t ≥ 0, z : [0, l] × [0, ∞) → R состояние объекта, u(x, t) сигнал управ-
ления, f(x, t)
возмущение класса C1. Коэффициенты a1, a2, φ и функ-
ция f(x, t) неизвестны, но известны границы интервалов, которым они при-
надлежат:
0 < a1 ≤ a1 < ∞, a2 ≤ a2 ≤ a2, φ ≤ φ ≤ φ,
|f(x, t)|
f.
Величина γ в (3) может быть неизвестной.
Замечание 1. При u(x,t) = 0 уравнение
(1) описывает конвекци-
онно-дифузионные процессы, а при a1 = 1, a2 = 0 и φ = 0 процессы диф-
фузии. В [2] уравнением (1) описывается вращающаяся стойка компрессора
с приводом впрыска воздуха u(x, t), где z(x, t) осевой поток через компрес-
сор. При u(x, t) = 0 и a2 = 0 краевая задача (1), (2) описывает распростране-
ние тепла в однородном одномерном стержне с фиксированной температурой
на концах, где a1 и φ коэффициенты теплопроводности и теплообмена с
окружающей средой соответственно, z(x, t) - значение температуры в момент
времени t в точке x.
2. Пусть второй класс исследуемых объектов описывается скалярным ли-
нейным дифференциальным уравнением гиперболического типа в виде
ztt(x,t) = a1zxx(x,t) + a2zx(x,t) + φz(x,t) - bzt(x,t) + u(x,t) + f(x,t),
(4)
x ∈ [0, l],
79
с граничными условиями Дирихле (2) или смешанными граничными условия-
ми (3). В (4) b > b > b > 0, где вершины b и b известны. Остальные константы
и функции в (4) принимают те же значения, что и в (1).
Замечание 2. При u(x,t) = 0 и a2 = 0 краевая задача (4), (2) описывает
колебания однородной струны с фиксированными концами и рассеиванием
энергии, где a1, b и φ коэффициенты упругости, диссипации и жесткости
соответственно, z(x, t) и zt(x, t) прогиб и скорость струны соответственно
в момент времени t в точке x.
2.2. Цель управления
Для решения задачи разобьем отрезок [0, l] на N подинтервалов, необяза-
тельно равной длины, и обозначим:
(5)
0=x0 <x1 <...<xN =l, Δ≥xj+1 -xj
,
j = 0,...,N - 1.
Здесь Δ известная константа. Предположим, что N сенсоров расположе-
ны внутри данных подинтервалов, т.е. доступны измерению только сигна-
лы z(xj , t), где xj ∈ (xj , xj+1), j = 0, . . . , N - 1.
Цель управления состоит в разработке дискретного по пространствен-
ной переменной x закона управления, который обеспечит экспоненциальную
устойчивость замкнутой системы для (1) и (4).
3. Синтез закона управления
Зададим закон управления в виде
u(x, t) = -KFj(z(xj , t), x, t),
(6)
x ∈ [xj,xj+1),
xj ∈ (xj,xj+1), j = 0,... ,N - 1,
где K > 0, функция Fj (z(xj , t), x, t) удовлетворяет следующим условиям:
(а) Fj (z(xj , t), x, t) класса C1 для любых t ≥ 0 и x ∈ [0, l];
(б) производная
Fjx (z(xj , t), x, t) ограничена для любых t ≥ 0 и x ∈ [0, l];
(в) Fj (z(xj , t), xj , t) = z(xj , t), xj ∈ (xj , xj+1), j = 0, . . . , N - 1.
Условие (а) требуется для решения краевой задачи (см. раздел 6). Тре-
бования (б) и (в) необходимы для доказательства устойчивости замкнутой
системы и ограниченности всех сигналов в ней. Приведем примеры функции
Fj(z(xj,t),x,t).
Пример 1. Пусть
Fj(z(xj,t),x,t) = ϕj(z(xj,t),x,t)z(xj,t),
где ϕj (z(xj , t), x, t) класса C1, ϕx(z(xj , t), x, t)z(xj , t) ограничена для любых x
и t, а также ϕj(z(xj,t), xj,t) = 1. В частности, если ϕj(z(xj,t),x,t) = 1 для
любых x и t, то получим закон управления из [14, 15]. Далее рассмотрим
примеры других функций ϕj (z(xj , t), x, t).
80
j j(z(-j, t), x, t)
1
a1
a2
x
0
-
xj
xj
xj + 1
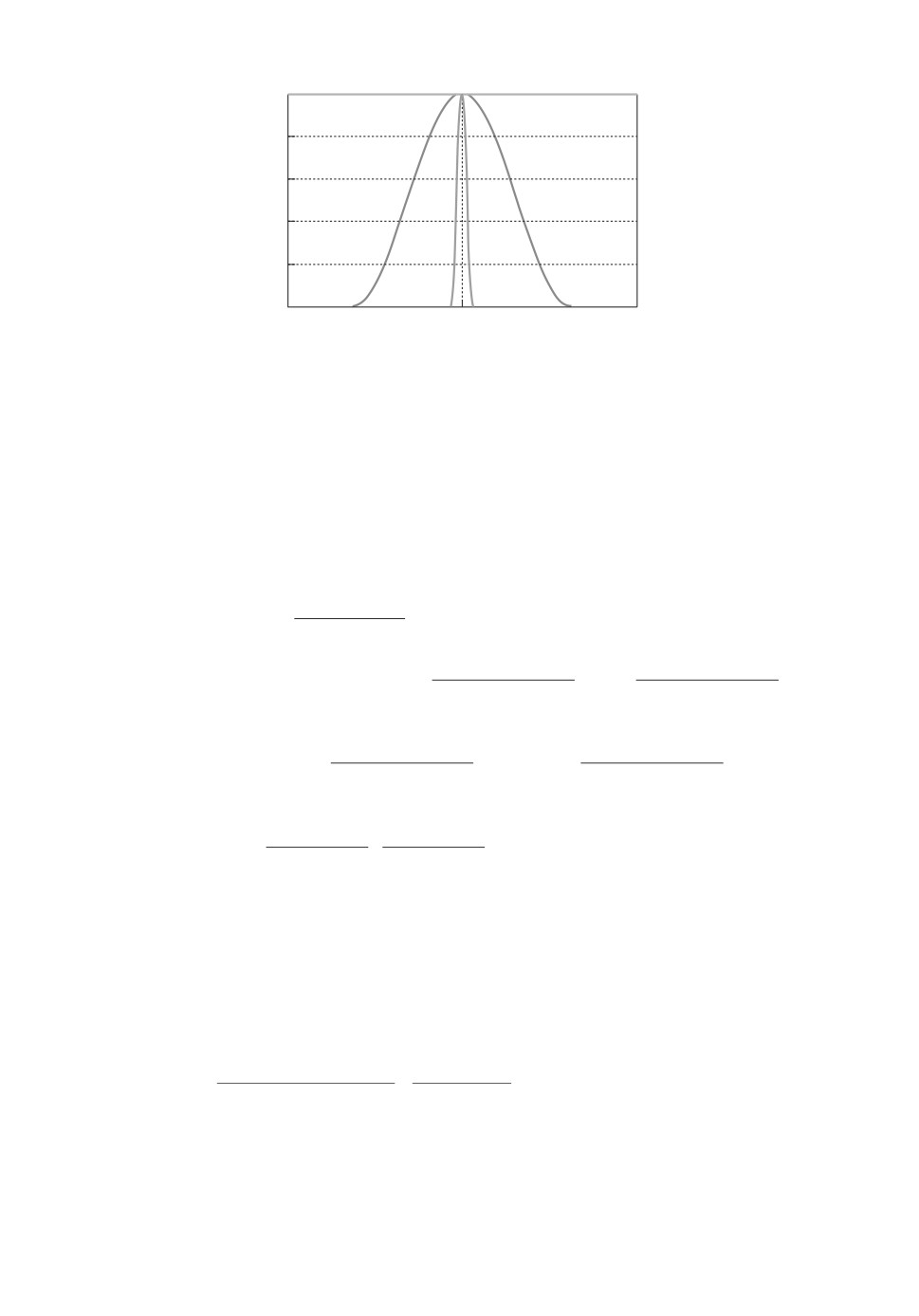
Рис. 1. График функции ϕj (z(xj , t), x, t) из примера 2 (при z(xj , t) =
= const > 0) на интервале x ∈ [xj, xj+1) при различных значениях
α > 0 ((α = α1) < (α = α2)).
Пример 2. В
[14, 15] u(x, t) = 0 на всем интервале
[xj , xj+1), если
z(xj,t) = 0. Приведем пример, когда u(x,t) = 0 лишь на части интервала
[xj, xj+1) при z(xj , t) = 0. Пусть в примере 1 функция ϕj задана в виде
(7)
ϕj (z(xj
,t),x,t) =
(
)
α(x - xj)
0,5 + 0,5 cos
,
1 + z2(xi,t)
[
]
π(1 + z2(xj , t))
π(1 + z2(xj , t))
x∈
xj -
;xj +
,
α
α
=
[
) (
)
(1 + z2(xj , t))
π(1 + z2(xj , t))
0, x ∈ xj ; xj -π
∪
xj +
;xj+1
α
α
Здесь α > 0 д{таточно большое числ}, которое может быть выбрано из
xj-xj
xj+1-xj
условия α > max
,
. Очевидно, что ϕj (z(xj , t), xj , t) =
π(1+z2(xj ,t))
π(1+z2(xj ,t))
= 1, ϕj (z(xj , t), x, t) класса C1 и ϕx(z(xj , t), x, t)z(xj , t) ограничена для любых
t ≥ 0, x ∈ [0,l] и z(xj,t) ∈ R. Графики функции (7) приведены на рис. 1.
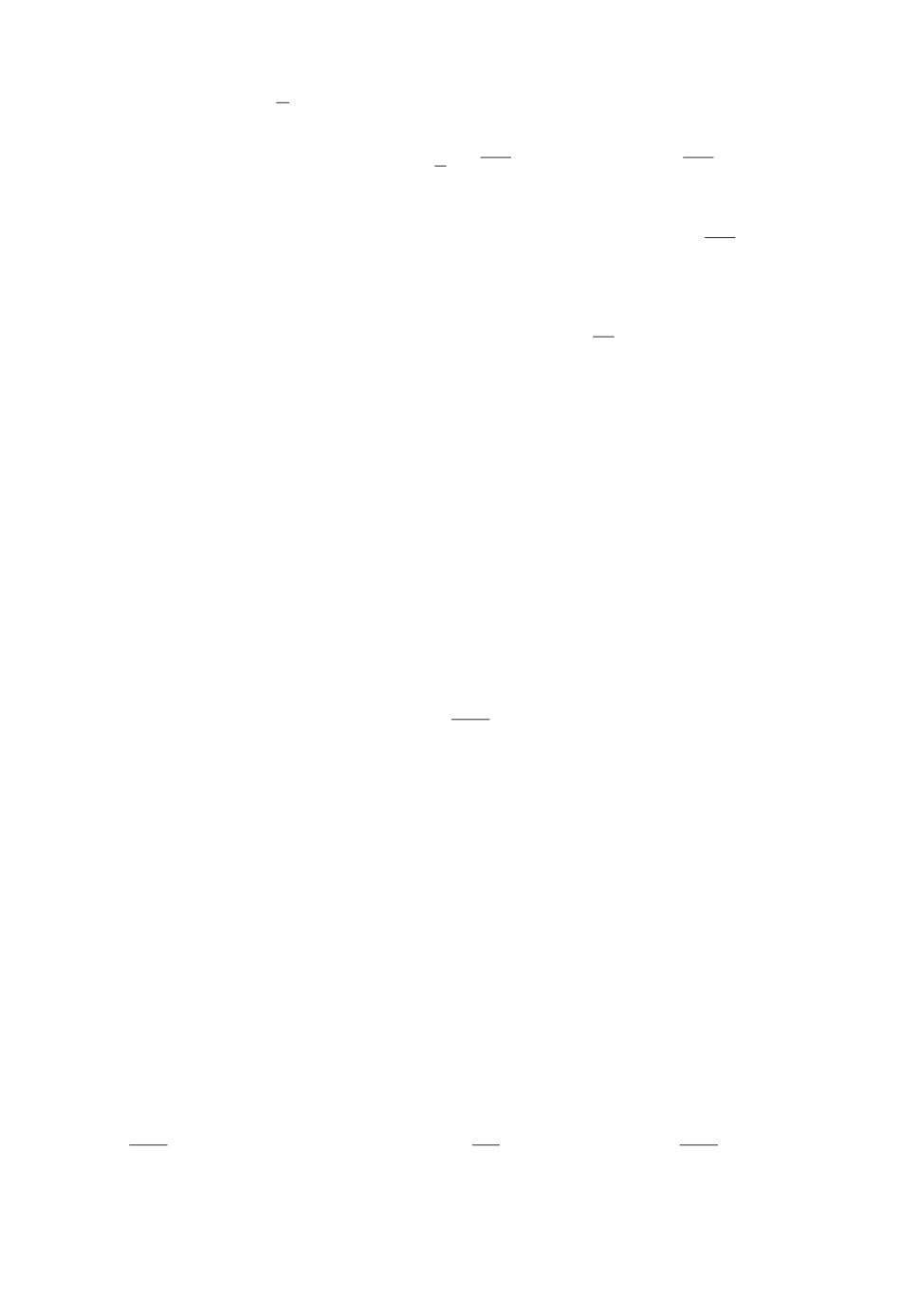
Пример 3. В (7) переход между значениями ϕj зависит от z(xj,t). Далее
приведем пример, исключающий данную зависимость. Зададим в примере 2
функцию ϕj в виде
ϕj (z(xj , t), x, t) =
{
α
α
(8)
-
+
(1+z2(xj ,t))(β2-(x-xj )2)
j
βj(1+z2(xj,t)) ,
x∈(xj -βj;xj +βj),
= e
0, x ∈ [xj; xj - βj ] ∪ [xj + βj ; xj+1) .
Здесь α > 0, βj ≤ min{xj+1 - xj, xj - xj }. В отличие от (7) в (8) переход меж-
ду значениями функции не зависит от z(xj , t), а зависит только от βj . Оче-
видно, что ϕj (z(xj , t), xj , t) = 1, функция ϕj (z(xj , t), x, t) класса C1, а также
81
j j(z(-j, t), x, t)
1
a1
a2
x
0
-
xj
xi
xj + 1
Рис. 2. График функции ϕj (z(xj , t), x, t) из примера 3 (при z(xj , t) =
= const > 0) на интервале x ∈ [xj, xj+1) при различных значениях
α > 0 ((α = α1) < (α = α2)).
ϕx(z(xj , t), x, t)z(xj , t) ограничена для любых t ≥ 0, x ∈ [0, l] и z(xj , t) ∈ R.
Графики функции (8) приведены на рис. 2.
Замечание 3. В [14] использовался закон управления u(x,t)=-Kz(xj,t),
xj = 0,5(xj + xj+1), x ∈ [xj,xj+1), j = 0,... ,N - 1, что является частным слу-
чаем (6) (см. пример 1). Если функцию Fj (z(xj , t), x, t) выбрать как в приме-
рах 2 или 3, то из рис. 1 и 2 видно, что площадь под кривой ϕj (z(xj , t), x, t) = 1
для [14] может быть существенно больше, чем площадь под остальными кри-
выми. Таким образом, предложенный закон управления может стабилизиро-
вать объект (1) при меньших затратах на управление, что далее будет про-
демонстрировано на численных примерах.
Пример 4. Приведем пример управления, близкого к граничному. Пусть
N = 2. Тогда отрезок [0,l] имеет следующее разбиение: 0 = x0 < x1 = l. Если
выбрать единственную на отрезке [0, l] функцию (7) или (8) с достаточно
большим значением α и точкой x0, достаточно близкой к левому или правому
концу отрезка [0, l], то получим управление, близкое к граничному. Если взять
N = 3, то можно две точки x0 и x1 выбрать достаточно близко к левому и
правому концам соответственно.
4. Основной результат для системы параболического типа (1)
Подставим (6) в (1) и запишем уравнение замкнутой системы:
zt(x,t) = a1zxx(x,t) + a2zx(x,t) + f(x,t) -
(9)
- (K - φ)z(x, t) + K[z(x, t) - Fj (z(xj , t), x, t)],
x ∈ [xj,xj+1), j = 0,... ,N - 1.
Теорема 1. Рассмотрим замкнутую систему (9) при граничных усло-
виях (2) или (3). Пусть для заданных коэффициентовR > 0, Δ > 0, δ > 0,
K > 0 будут разрешимы следующие два линейных матричных неравенства:
(10)
Ψ (a2 = a2) ≤ 0, Ψ (a2 = a2
) ≤ 0,
82
где
-2K + 2φ + 2δ + KR
a2
1
0
∗
-2a1 +4Δ2
KR-1
0
-4Δ2KR-1
π2
π2
(11)
Ψ=
.
∗
∗
-β1
0
∗
∗
∗
-β2 +4Δ2
KR-1
π2
Тогда будет выполнено следующее неравенство
γ
(12)
∥z(·, t)∥2L
≤ e-2δt∥z(·,0)∥2L
+
,
2
2
2δ
где
∫
l
∫
∑
γ = β1 sup
f2(x,t)dx + β2 sup
(Fjx (x, t))2dx.
t≥0
t≥0
0
j=0 xj
Перед доказательством теоремы 1 рассмотрим две вспомогательные лем-
мы.
Лемма 1 (расширенное неравенство Виртингера). Пусть z ∈ H1(0,l)
скалярная функция,
0=χ0 <χ1 <...χn-1 <χn =l и Δ≥χi -χi+1, i=
= 0, . . . , n - 1. Если z(χi) = 0, i = 1, . . . , n - 1, тогда
∫
l
∫
l
4Δ2
(13)
z2(ξ)dξ ≤
z2ξ
(ξ)dξ.
π2
0
0
Доказательство. Перепишем левую часть неравенства (13) в виде
l
χ1
l
∫
∫
∫
∫
∑
z2(ξ)dξ = z2(ξ)dξ +
z2(ξ)dξ +
z2(ξ)dξ.
0
0
i=1 χi
χn-1
Применяя неравенство Виртингера [16] к каждому интегральному выраже-
нию, получим
χ1
l
∫
∫
∫
∑
z2(ξ)dξ +
z2(ξ)dξ +
z2(ξ)dξ ≤
0
χn-1
i=1 χi
χ1
l
l
∫
∫
∫
∫
2
∑
4Δ
4Δ2
≤
z2ξ(ξ)dξ +
z2ξ(ξ)dξ ≤
z2ξ(ξ)dξ.
π2
π2
π2
0
χn-1
i=1 χi
0
Лемма 1 доказана.
83
Лемма 2. Пусть функция V : [t0,∞) → [0,∞) дифференцируема на
[t0, ∞) и задано дифференциальное неравенство
(14)
V
(t) ≤ -δV (t) + f(t),
где δ > 0 и sup |f(t)| = β. Тогда справедливо следующее неравенство
t≥t0
β
(15)
V (t) ≤ e-δ(t-t0 )V (t0) +
,
t≥t0.
δ
Доказательство. Обозначим
β
y(t) = e-δ(t-t0 )V (t0) +
,
t≥t0.
δ
Легко проверить, что функция y(t) является решением дифференциального
уравнения
(16)
y(t) = -δy(t) + β, t ≥ t0.
Воспользуемся принципом сравнения и покажем, что V (t) ≤ y(t) для любых
t ≥ t0. Пусть ε1 > ε2 > ... > εn > ...
последовательность положительных
чисел таких, что limn→∞ εn = 0+. Тогда функция
β
εn
(17)
yn(t) = -δy(t) +
+
δ
δ
является решением дифференциального уравнения
(18)
y(t) = -δy(t) + β + εn.
Предположим, что существует t∗ > t0, такое что
(19)
t∗ = inf{t > t0 : V (t) ≥ yn
(t)}.
Тогда V (t∗) ≥ yn(t∗) и V (t) < yn(t) при t0 ≤ t ≤ t∗. Из (14) и (18) имеем
V (t∗) < yn(t∗). С другой стороны, из V (t) < yn(t) при t < t∗ и V (t∗) = yn(t∗)
следует, что
V (t∗) ≥ yn(t∗). Пришли к противоречию. Значит, V (t) < yn(t)
для всех t ≥ t0 и n = 1, 2,
Следовательно, V (t) ≤ limn→∞ yn(t) = y(t) при
всех t ≥ t0. Доказательство леммы 2 закончено.
Доказательство теоремы 1. Для анализа устойчивости замкнутой
системы (9) рассмотрим следующий функционал Ляпунова
∫l
(20)
V (t) = z2
(x, t)dx.
0
84
Дифференцируя V (t) по времени вдоль траекторий (9), составим следующее
выражение
∫l
[
V (t) + 2δV (t) = 2
a1z(x,t)zxx(x,t) + a2z(x,t)zx(x,t) -
0
]
(21)
− (K - φ)z2(x, t) + z(x, t)f(x, t) dx +
∫
∫
l
∑
[
]
+ 2K
z(x, t) z(x, t) - Fj (x, t)
+ 2δ z2(x, t)dx,
j=0 xj
0
где ради краткости в доказательстве обозначим Fj (z(xj , t), x, t) = Fj (x, t).
С учетом граничных условий (2) или (3) проинтегрируем по частям первое
слагаемое в (21):
∫l
2a1
z(x, t)zxx(x, t)dx =
0
(22)
∫
l
∫
l
l
= 2a1z(x, t)zx(x, t)
- 2a1
z2
x
(x, t)dx ≤ -2a1 z2x(x, t)dx.
0
0
0
Используя неравенство Юнга для предпоследнего слагаемого в (21), полу-
чим
∫
[
]
∑
2K
z(x, t) z(x, t) - Fj (x, t) dx ≤
j=0 xj
(23)
∫l
∫
∑
[
]2
≤ K R z2(x,t)dx + K R-1
z(x, t) - Fj (x, t)
dx.
0
j=0 xj
Согласно условию (в) z(x, t) = Fj(x, t) в точке x = xj. Тогда применяя лем-
му 1 к (23), получим
∫
[
]2
∑
KR-1
z(x, t) - Fj(x, t)
dx ≤
j=0 xj
(24)
∫
2
∑
[
]
4Δ
≤
KR-1
z2x(x,t) - 2zx(x,t)Fjx(x,t) + (Fjx(x, t))2
dx.
π2
j=0 xj
85
Обозначим ηj = col{z(x, t), zx(x, t), f(x, t),
Fjx (x, t)}. Применяя (22)-(24)
к (21), получим
∫l
∫
∑
V (t) + 2δV (t) - β1 f2(x, t)dx - β2
Fjx(x,t)dx ≤
0
j=0 xj
(25)
∫
∑
≤
ηTjΨηjdx,
j=0 xj
где Ψ задана в (11). Матрица (11) аффинна по отношению к параметру a2.
Значит, согласно [17] если выполнены ЛМН (10) в вершинах a2 = {a2, a2}, то
ЛМН Ψ ≤ 0 будет выполнено для любых a2 ∈ [a2, a2]. Следовательно, будет
выполнено неравенство
∫l
∫
∑
(26)
V (t) + 2δV (t) - β1 f2(x, t)dx - β2
Fjx
(x, t)dx ≤ 0.
0
j=0 xj
Воспользовавшись леммой 2, решение дифференциального неравенства (26)
определим в виде
γ
(27)
V (t) ≤ V (0)e-2δt +
2δ
Тогда из (27) следует (12). Теорема 1 доказана.
5. Основной результат для системы гиперболического типа (4)
Подставим (6) в (4) и запишем уравнение замкнутой системы:
ztt(x,t) = a1zxx(x,t) + a2zx(x,t) - bzt(x,t) + f(x,t) -
[
]
(28)
- (K - φ)z(x, t) + K z(x, t) - Fj (z(xj , t), x, t) ,
x ∈ [xj,xj+1), j = 0,... ,N - 1.
Теорема 2. Рассмотрим замкнутую систему (28) при граничных усло-
виях (2) или (3). Пусть для заданных коэффициентов p ∈ (-0,5; 0,5),R > 0,
Δ > 0, δ > 0, K > 0 будут разрешимы следующие линейные матричные нера-
венства в соответствующих вершинах:
(
)
(29)
Ψ φ = {φ,φ},a2 = {a2,a2},b = {b,b}
≤ 0,
86
где
Ψ11
0,5pa2
Ψ13
0,5p
0
4Δ2
∗
Ψ22
a2
0
-
KR-1
π2
∗
∗
Ψ33
1
0
Ψ=
,
∗
∗
∗
-β1
0
2
4Δ
∗
∗
∗
∗
-β2 +
KR-1
(30)
π2
Ψ11 = -0,5p(K - φ) + 0,25KRp2 + 2δ,
Ψ13 = 1 - 0,5pb - K + φ + KRp,
2
4Δ
Ψ22 = -pa1 +
KR-1,
π2
Ψ33 = 0,5p - 2b + 0,5KR.
Тогда будет выполнено неравенство (12), параметры которого расчиты-
ваются с учетом (29).
Доказательство. Для анализа устойчивости замкнутой системы (28)
рассмотрим функционал Ляпунова в виде
∫l
[
]
(31)
V (t) =
a1z2x(x,t) + z2(x,t) + pz(x,t)zt(x,t) + z2t(x,t)
dx.
0
При p ∈ (-0,5; 0,5) будет справедливо неравенство z2 + pzzt + z2t ≥ 0. Значит,
V (t) ≥ 0. Дифференцируя V (t) по времени вдоль траекторий (28), составим
выражение
∫l
[
V (t) + 2δV (t) = 2
a1zx(x,t)zxt(x,t) + z(x,t)zt(x,t) + 0,5pz2t(x,t) +
0
[
][
+ 0,5pz(x, t) + zt(x, t) a1zxx(x, t) + a2zx(x, t) -
]
- bzt(x, t) + f(x, t) - (K - φ)z(x, t) dx +
(32)
∫
∑
[
][
]
+ 2K
0,5pz(x, t) + zt(x, t) z(x, t) - Fj (x, t)
+
j=0 xj
∫l
+ 2δ z2(x, t)dx,
0
87
где ради краткости в доказательстве обозначим Fj (z(xj , t), x, t) = Fj (x, t).
С учетом граничных условий (2) или (3), проинтегрируем по частям первое
слагаемое в (32):
∫l
2a1
zx(x,t)zxt(x,t)dx =
0
∫
l
l
(33)
= 2a1zx(x, t)zt(x, t)
- 2a1
zt(x,t)zxx(x,t)dx =
0
0
∫l
= -2a1
zt(x,t)zxx(x,t)dx.
0
Используя неравенство Юнга для предпоследнего слагаемого в (32), полу-
чим
∫
∑
[
][
]
2K
0,5pz(x, t) + zt(x, t) z(x, t) - Fj (x, t) dx ≤
j=0 xj
∫l
[
]2
(34)
≤KR
0,5pz(x, t) + zt(x, t)
dx +
0
∫
∑
[
]2
+KR-1
z(x, t) - Fj (x, t)
dx.
j=0 xj
Так как z(x, t) = Fj (x, t) в точке x = xj (см. условие (в)), то, применяя
лемму 1 к (34), получим (24). Обозначим
ηj = col{z(x, t), zx(x, t), zt(x, t), f(x, t),
x
(x, t)}.
Применяя (22), (33), (34) и (24) к (32), запишем результат в виде
∫l
∫
∑
V (t) + 2δV (t) - β1 f2(x, t)dx - β2
Fjx(x,t)dx ≤
0
j=0 xj
(35)
∫
∑
≤
ηTj Ψηjdx.
j=0 xj
88
ЗдесьΨ задано в (30). МатрицаΨ аффинна по отношению к параметрам φ,
a2 и b. Согласно [17] если выполнены ЛМН (29) в вершинах φ = {φ,φ}, a2 =
= {a2, a2} и b = {b, b}, то ЛМН
Ψ≤ 0 выполнено для любых φ ∈ [φ,φ],
a2 ∈ [a2,a2] и b ∈ [b,b]. Следовательно, будет выполнено неравенство (35).
Воспользовавшись леммой 2, решение дифференциального неравенства (35)
можно записать в виде (27). Тогда из (27) следует неравенство (12), парамет-
ры которого расчитываются с учетом (29). Теорема 2 доказана.
6. Решение краевой задачи
Покажем, что существуют решения уравнений (9) и (28), удовлетворяю-
щие граничным условиям (2) или (3).
6.1. Замкнутая система (9)
Сначала рассмотрим уравнение (9) с граничными условиями (2). Крае-
вую задачу (9), (2) можно сформулировать как абстрактную неоднородную
задачу Коши в гильбертовом пространстве H = L2(0, l) в виде
(36)
Ż(t) = Az(t) + F (t, z(t)), z0
= z(0) ∈ D(A).
Здесь оператор
∂2
∂
A=a1
+a2
+φ
∂x2
∂x
имеет область определения
D(A) = {z ∈ H2(0, l) : z(0) = z(l) = 0},
F (t, z(t)) = f(t) + u(t),
функция u(t) задана в (6). Согласно теореме 1, [18] и [19] инфинитезималь-
ный оператор A генерирует строго непрерывную экспоненциально устойчи-
вую полугруппу (C0-полугруппу) T (t). Тогда краевая задача (36) может быть
сформулирована как краевая задача на полубесконечном интервале [0, ∞) и
ее решения могут быть найдены как решения интегрального уравнения
∫t
(37)
z(t) = T (t)z(0) +
T (t - s)F (s, z(s))ds.
0
Так как функция F (t, z(t)) класса C1, то согласно теореме 3.1.3 из [19] су-
ществует единственное решение (36), которое удовлетворяет интегральному
уравнению (37). Краевая задача при смешанных граничных условиях (3) ре-
шается аналогично.
89
6.2. Замкнутая система (28)
Теперь рассмотрим уравнение (28) с граничными условиями (2) или (3).
Запишем сначала краевую задачу (28), (2) как абстрактную неоднородную
задачу Коши в гильбертовом пространстве H = L2(0, l) в виде
(38)
ξ(t) =
Aξ(t)
F (t, ξ(t)), ξ0 = ξ(0) ∈
A,
где ξ = col{z, zt}, оператор
0
1
A=
∂2
-b
a1 ∂x2+φ
имеет область определения
D
A) = {ξ ∈ H2(0,l) : ξ(0) = ξ(l) = 0},
F (t, ξ(t)) = [0 1]T [f(t) + u(t)],
функция u(t) задана в (6). Согласно теореме 1, [18] и [19] инфинитезимальный
оператор A генерирует строго непрерывную экспоненциально устойчивую
полугруппу (C0-полугруппу) T (t). Следовательно, дальнейшие рассуждения
для уравнения (38) аналогичны рассуждениям для (36) в подразделе 6.1.
7. Численное исследование предложенной схемы управления
7.1. Моделирование системы управления
Пусть l = 1. Для моделирования систем (1) и (4) разделим отрезок [0, 1]
на 160 подынтервалов одинаковой длины. Тогда шаг дискретизации по про-
странственной переменной D = 1/160. Производные первого и второго по-
рядков по пространственной переменной от функции z(x, t) вычисляются в
точках 0 = x0 < x1 < . . . xl < . . . < x160 с помощью формул
z(xk+1, t) - z(xk, t)
zx(xk,t) =
D
и
z(xk+1, t) - 2z(xk, t) + z(xk-1, t)
zxx(xk,t) =
D2
Для формирования закона управления (6) разделим отрезок [0, 1] пооче-
редно на N = 2 и на N = 10 равных подынтервалов (см. (5)).
Рассмотрим системы (1) и (4) при граничных условиях Дирихле (2) и
a1 ≥ 0,5, a2 ∈ [-5,5], φ ∈ [-5,5], b = [-5,-1], |f(x,t)| ≤ 20 для любых x и t.
Матричные неравенства (10) и (29) разрешимы при K ≥ 100.
90
7.2. Результаты моделирования для системы (1)
В (1) выберем a1 = 1, a2 = -1, φ = 5, f(x, t) = 0,2[sin(30kt) + sin(2kt)],
k = 0,...,160 и z(x,0) = sin(πxk). Для моделирования алгоритмов управ-
ления рассмотрим два разбиения: N = 2 и N = 10 (см. (5)). Пусть xj =
= 0,5(xj + xj+1). В законе управления (6) выберем функцию Fj (z(xj , t), x, t)
из примера 3, где α = 103, а также βj = 1/8 при N = 2 и βj = 1/80 при N =
= 10.
На рис. 3-5 представлены решения (1) и графики u(x, t) для:
1) закона управления u(x, t) = -Kz(xj, t) из [14, 15] при K = 100;
2) предложенного закона управления (6) при K = 100;
3) предложенного закона управления (6) при K = 500.
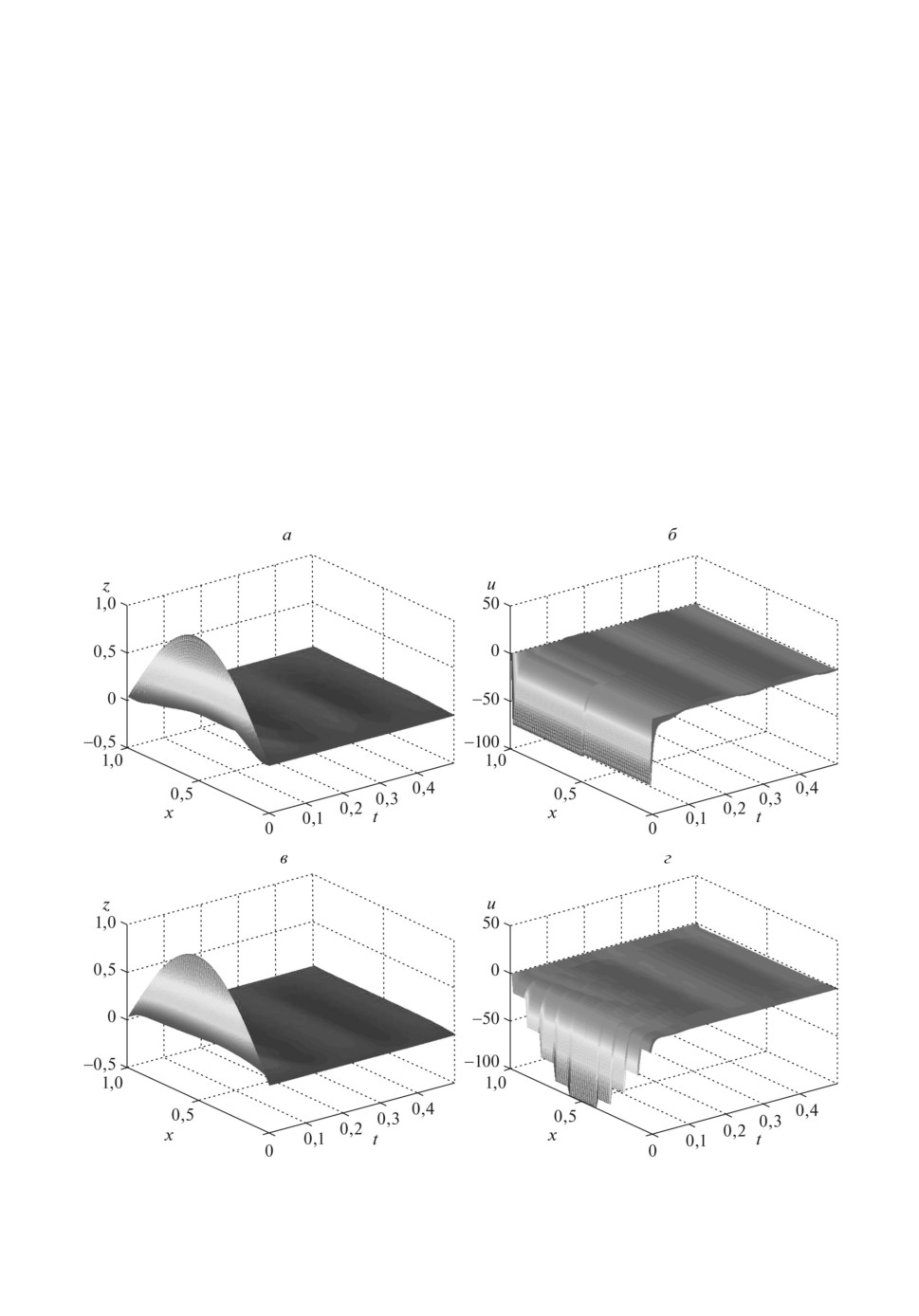
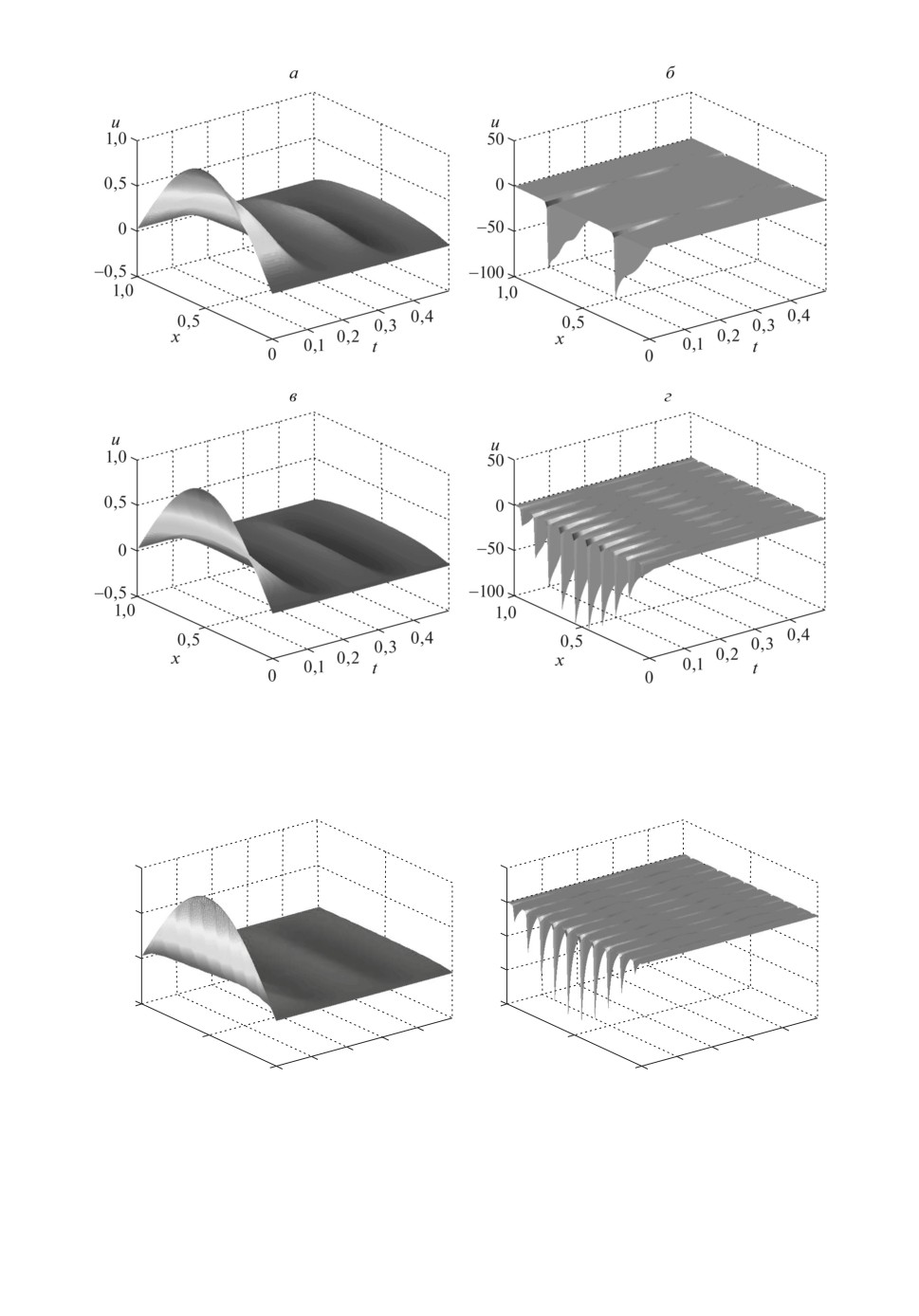
Из рис. 3 и 4 видно, что качество управления по z(x, t) для предложенного
закона управления незначительно уступает качеству управления для алго-
ритма из [14, 15]. При этом предложенный алгоритм обеспечивает экспонен-
циальную устойчивость по z(x, t) в условиях возмущений. Если же увеличить
коэффициент K в предложенном законе управлении в 5 раз, то амплитуда
Рис. 3. Пространственно-временные графики по z(x, t) и u(x, t) для [14, 15]
при N = 2 (а, б ) и N = 10 (в, г) при K = 100.
91
Рис. 4. Пространственно-временные графики по z(x, t) и u(x, t) для предло-
женного алгоритма при N = 2 (а, б ) и N = 10 (в, г) при K = 100.
u
u
1,0
200
0
0,5
-200
0
-400
-0,5
-600
1,0
1,0
0,4
0,4
0,5
0,3
0,5
0,3
x
0,2
x
0,2
0,1
t
0,1
t
0
0
Рис. 5. Пространственно-временные графики по z(x, t) и u(x, t) для предло-
женного алгоритма при N = 10 при K = 500.
92
I
I
a
б
140
80
120
70
60
100
50
80
40
60
30
40
20
20
10
0
0,1
0,2
0,3
0,4
0,5
0
0,1
0,2
0,3
0,4
0,5
t
t
Рис. 6. Разница затрат на управление при N
= 2
(а) и N = 10 (б ) меж-
ду использованием закона управления из [14,
15] и предложенным законом
управления соответственно при K = 100.
I
10
8
6
4
2
0
0,1
0,2
0,3
0,4
0,5
t
Рис. 7. Разница затрат на управление при N = 10 между использованием за-
кона управления из [14, 15] при K = 100 и предложенным законом управления
при K = 500.
управления также возрастет примерно в 5 раз, но при этом скорость экспонен-
циальной сходимости и качество подавления возмущения в установившемся
режиме будет выше, чем у алгоритма из [14, 15] при K = 100.
Теперь проанализируем затраты на управление. На рис. 6 и 7 представлена
интегральная разность вида
t
∫
∑
I =
(|uF&B(xj , s)| - |uproposed(xj, s)|) ds,
j=0 0
где uF&B(xj , t) - закон управления [14], uproposed(xj , t) - предложенный закон
управления. Из рис. 6 и 7 видно, что затраты на управление у предложенного
93
алгоритма меньше, чем у [14]. При этом предложенный закон управления
принимает ненулевые значения лишь на части пространственной переменной,
в то время как управление [14, 15] требует реализации на протяжении всей
пространственной переменной, см. рис. 3-5.
Отметим, что результаты моделирования для функции Fj(z(xj , t), x, t) из
примера 2 с α = 100 сопоставимы с результатами, полученными для функции
Fj(z(xj,t),x,t) из примера 3, поэтому они не приводятся.
7.3. Результаты моделирования для системы (4)
При моделировании (4) выберем a1 = 1, a2 = -1, b = -1, φ = 5 и f(x, t) =
= 0,2[sin(30kt) + sin(2kt)], k = 0, . . . , 160, z(x, 0) = sin(πxk) и zt(x, 0) = 0. В за-
коне управления (6) зададим параметры как в подразделе 7.2. На рис. 8
и 9 представлены решения (4) и графики u(x,t) для предложенного зако-
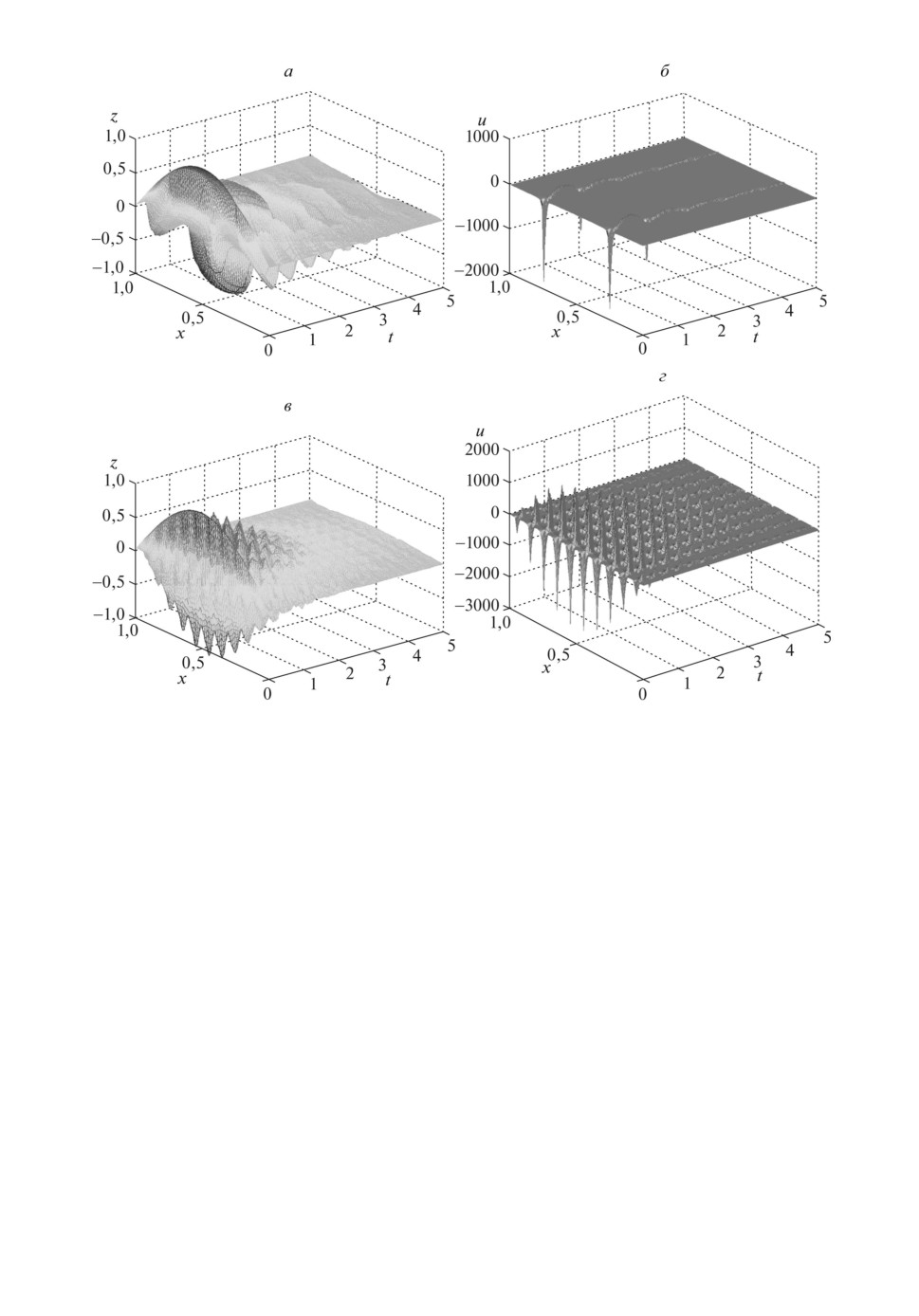
на управления (6) при K = 100 и K = 500, а также при N = 2 и N = 10. Из
рис. 8 и 9 видно, что предложенный алгоритм обеспечивает экспоненциаль-
ную устойчивость по z(x, t) в условиях возмущений. Результаты моделиро-
Рис. 8. Пространственно-временные графики по z(x, t) и u(x, t) для предло-
женного алгоритма при N = 2 (а, б ), N = 10 (в, г) и K = 100.
94
Рис. 9. Пространственно-временные графики по z(x, t) и u(x, t) для предло-
женного алгоритма при N = 2 (а, б ), N = 10 (в, г) и K = 500.
вания для функции Fj(z(xj , t), x, t) из примера 3 с α = 100 сопоставимы с
результатами, полученными для функции Fj (z(xj , t), x, t) из примера 2, по-
этому они не приводятся.
8. Заключение
Предложен дискретный по пространственной переменной закон управле-
ния скалярными линейными дифференциальными уравнениями параболиче-
ского и гиперболического типов с интервально неопределенными параметра-
ми и внешними ограниченными возмущениями. Для синтеза закона управ-
ления используется конечный набор измерений выходного сигнала. Закон
управления зависит от функции, зависящей от пространственной коорди-
наты и текущего измерения. Данная функция позволяет достигать разных
свойств, например обеспечивать пониженные затратами на управление или
реализовывать управление, близкое к граничному. Доказана экспоненциаль-
ная устойчивость замкнутых систем и робастность по отношению к парамет-
рам и внешним возмущениям.
95
Численные примеры моделирования подтвердили результаты расчетов и
показали эффективность предложенного алгоритма по сравнению с резуль-
татом [14, 15] в том смысле, что при меньших затратах на управление можно
повысить скорость сходимости решений и повысить качество регулирования
в установившемся режиме.
СПИСОК ЛИТЕРАТУРЫ
1.
Candogan U.O., Ozbay H., Ozaktas H.M. Controller Implementation for a Class
of Spatially-varying Distributed Parameter Systems // IFAC Proceedings Volumes
(Proc. 17th IFAC World Congr.). 2008. V. 41. No. 2. P. 7755-7760.
2.
Hagen G., Mezic I. Spillover Stabilization in Finite-dimensional Control Observer
Design for Dissipative Evolution Equations // SIAM J. Control Optim. 2003. V. 42.
No. 2. P. 746-768.
3.
Smagina E., Sheintuch M. Using Lyapunov’s Direct Method for Wave Suppression
in Reactive Systems // Syst. Control Lett. 2006. V. 55. No. 7. P. 566-572.
4.
Demetriou M.A. Guidance of Mobile Actuator-plus-sensor Networks for Improved
Control and Estimation of Distributed Parameter Systems // IEEE Trans. Automat.
Control. 2010. V. 55. P. 1570-1584.
5.
Smyshlyaev A., Krstic M. On Control Design for PDEs with Spacedependent Diffu-
sivity or Time-dependent Reactivity // Automatica. 2005. V. 41. P. 1601-1608.
6.
Krstic M., Smyshlyaev A. Adaptive Boundary Control for Unstable Parabolic PDEs-
part I: Lyapunov Design // IEEE Trans. Automat. Control. 2008. V. 53. P. 1575-
1591.
7.
Delchamps D.F. Extracting State Information from a Quantized Output Record //
Syst. Control Lett. 1989. V. 13. P. 365-372.
8.
Brockett R.W., Liberzon D. Quantized Feedback Stabilization of Linear Systems //
IEEE Trans. Automat. Control. 2000. V. 45. P. 1279-1289.
9.
Baillieul J. Feedback Coding for Information-Based Control: Operating near the
Data Rate Limit // Proc. 41st IEEE Conf. Decision Control, Las Vegas, Nevada,
USA, 2002. P. 3229-3236.
10.
Zheng B.-C., Yang G.-H. Quantized Output Feedback Stabilization of Uncertain Sys-
tems with Input Nonlinearities via Sliding Mode Control // Int. J. Robust Nonlinear
Control. 2012. V. 24. No. 2. P. 228-246.
11.
Khapalov A.Y. Continuous Observability for Parabolic System under Observations of
Discrete Type // IEEE Trans. Automat. Control. 1993. V. 38. No. 9. P. 1388-1391.
12.
Cheng M.B., Radisavljevic V., Chang C.C., Lin C.F., Su W.C. A Sampled Data
Singularly Perturbed Boundary Control for a Diffusion Conduction System with
Noncollocated Observation // IEEE Trans. Automat. Control. 2009. V. 54. No. 6.
P. 1305-1310.
13.
Logemann H., Rebarber R., Townley S. Generalized Sampled-data Stabilization of
Well-posed Linear Infinite-dimensional Systems // SIAM J. Control Optim. 2005.
V. 44. No. 4. P. 1345-1369.
14.
Fridman E., Blighovsky A. Robust Sampled-data Control of a Class of Semilinear
Parabolic Systems // Automatica. 2012. V. 48. P. 826-836.
15.
Liu K., Fridman E., Xia Y. Networked Control under Communication Constraints:
A Time-Delay Approach. Springer International Publishing, Advances in Delays and
Dynamics, 2020.
96
16. Hardy G.H., Littlewood J.E., Polya G. Inequalities. Cambridge: Cambridge: Univer-
sity Press, 1988.
17. Fridman E. Introduction to Time-Delay Systems. Analysis and Control. Birkhauser,
2014.
18. Henry D. Geometric Theory of Semilinear Parabolic Equations. N.Y.: Springer-
Verlag, 1993.
19. Curtain R., Zwart H. An Introduction to Infinite-dimensional Linear Systems The-
ory. N.Y.: Springer-Verlag, 1995.
Статья представлена к публикации членом редколлегии А.Г. Кушнером.
Поступила в редакцию 18.08.2020
После доработки 20.10.2020
Принята к публикации 28.10.2020
97