Автоматика и телемеханика, № 4, 2021
© 2021 г. И.Б. ФУРТАТ, д-р техн. наук (cainenash@mail.ru)
П.А. ГУЩИН, канд. техн. наук (guschin.p@mail.ru)
(Институт проблем машиноведения РАН, Санкт-Петербург),
УПРАВЛЕНИЕ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
С ГАРАНТИЕЙ НАХОЖДЕНИЯ РЕГУЛИРУЕМОГО СИГНАЛА
В ЗАДАННОМ МНОЖЕСТВЕ1
Предложен метод управления динамическими системами, позволяю-
щий гарантировать нахождение выходного сигнала объекта в заданном
множестве в любой момент времени. Для решения задачи используется
специальная замена координат, позволяющая свести исходную задачу с
ограничениями к задаче исследования на устойчивость по вход-состоянию
новой расширенной системы без ограничений. Приведены примеры заме-
ны координат и синтезированы алгоритмы управления линейными объ-
ектами и системами с секторной нелинейностью при наличии параметри-
ческой неопределенности и возмущений. Полученные результаты сопро-
вождаются моделированием, иллюстрирующим эффективность предло-
женного метода и подтверждающим теоретические выводы.
Ключевые слова: динамическая система, замена координат, устойчивость,
управление.
DOI: 10.31857/S000523102104005X
1. Введение
Задача управления объектами с обеспечением желаемого качества пере-
ходных процессов по регулируемой переменной является одной из основ-
ных задач теории автоматического управления. В условиях определенности
параметров модели объекта существует ряд классических методов: методы
управления с заданным расположением собственных чисел замкнутой систе-
мы, методы управления с обеспечением желаемых частотных характеристик
замкнутой системы, методы оптимального управления и т.д., см., напри-
мер, [1-4]. Вопрос улучшения оценки сверху для отклонения регулируемой
переменной в линейных параметрически определенных системах с ненулевы-
ми начальными условиями до сих пор остается актуальным [5-7].
Для управления в условиях параметрической неопределенности и возму-
щений можно выделить методы адаптивного и робастного управления, где
качество регулирования задается эталонным сигналом, см., например, [8-10].
1 Результаты разделов 3-5 получены при поддержке гранта Российского научного
фонда (проект № 18-79-10104) в Институте проблем машиноведения РАН. Результаты
раздела 6 получены при поддержке гранта Президента Российской Федерации (грант
№ МД-1054.2020.8) в Институте проблем машиноведения РАН.
121
Однако методы [8-10] не гарантируют заданного отклонения регулируемого
сигнала от эталонного в переходном режиме. Если начальные условия объ-
екта неизвестны, то в начальный момент времени данные отклонения могут
быть произвольно большими. Методы [8-10] гарантируют только заданное от-
клонение регулируемой переменной от эталонного сигнала в установившемся
режиме.
Метод [11] позволяет гарантировать нахождение фазовых траекторий си-
стемы в некотором наименьшем эллипсоиде в переходном и установившемся
режимах. Однако данный эллипсоид остается одним и тем же в любой момент
времени, что может давать грубое качество регулирования в переходном и в
установившемся режимах.
В [12] рассмотрено применение адаптивного управления с обеспечением
регулируемой переменной в заданных множествах, которые могут быть раз-
ными для переходного и установившегося режимов. Данные множества за-
даются последовательностью прямоугольников, где высота каждого прямо-
угольника соответствует желаемому максимальному отклонению выходной
переменной объекта от положения равновесия, а длина прямоугольника
желаемому времени нахождения выходной переменной объекта в соответ-
ствующем прямоугольнике. Однако прямоугольные области в [12] достаточно
грубые и алгоритм применим только для объектов со скалярными входными
и выходными сигналами.
В отличие от [12] в [13] предложен метод управления с гарантией нахож-
дения регулируемой переменной в заданном криволинейном множестве для
объектов с векторными входными и выходными сигналами. Однако реализа-
ция данного метода требует знания знака и множества начальных условий
объекта, а полученные верхние и нижние оценки переходных процессов до-
статочно грубые в том смысле, что определяются одной функцией с разными
знаками. Причем верхние и нижние оценки должны асимптотически сходить-
ся к некоторым константам. В настоящее время результат [13] имеет большое
количество обобщений на разного рода системы, см. например, [14-16], но
все вышеперечисленные особенности метода [13] остаются справедливыми и
в [14-16].
Настоящая статья сфокусирована на получении нового метода управления
с обеспечением регулируемой переменной в заданном множестве. В отличие
от [13] целевое множество не будет зависеть от знака значений начальных
условий, а требуется только знание множества начальных значений объекта
управления. По сравнению с [12, 13] конфигурация заданного множества мо-
жет задаваться произвольными ограниченными непрерывно-дифференцируе-
мыми функциями, для которых не требуется асимптотическая сходимость.
В результате полученный метод позволит существенно расширить класс ре-
шаемых задач в смысле качества переходных процессов в отличие от [12, 13].
Статья организована следующим образом. В разделе 2 приведен класс ис-
следуемых объектов и поставлена цель управления в виде принадлежности
выходного сигнала объекта заданному множеству. Раздел 3 содержит основ-
ной результат, где предложена специальная замена координат, которая поз-
воляет свести исходную задачу с ограничениями к задаче исследования на
122
устойчивость по вход-состоянию новой расширенной динамической системы
без ограничений. Также в разделе 3 приведены примеры такой замены ко-
ординат. Возможность использования предложенного метода продемонстри-
рована в дальнейших разделах для некоторых видов систем. Так, в разде-
ле 4 предложен алгоритм управления по состоянию линейными объектами с
известными параметрами и неизвестным внешним ограниченным возмуще-
нием. Раздел 5 содержит синтез закона управления, который не зависит от
параметров объекта, где сам объект описывается динамической системой с
секторной нелинейностью и возмущениями. Раздел 6 иллюстрирует приме-
нимость предложенной схемы для объекта управления с произвольной отно-
сительной степенью. Разделы 4-6 сопровождаются моделированием, иллюст-
рирующим эффективность предложенного метода, и анализом полученных
результатов.
2. Постановка задачи
Рассмотрим динамическую систему
x = F(x,u,t),
(1)
y = h(x),
где t ≥ 0, x ∈ Rn
вектор состояния, u ∈ Rm
сигнал управления, y =
= col {y1, . . . , yv} выходной сигнал, вектор-функция F определена для всех
x, u и t, кусочно-непрерывна и ограничена по t, h(x) непрерывно-диффе-
ренцируемая функция по x. Объект управления (1) управляемый и наблю-
даемый для любого x ∈ Rn.
Требуется разработать закон управления, который обеспечит нахождение
выходного сигнала объекта y(t) в следующем множестве
{
}
(2)
Y = y ∈ Rv : gi(t) < yi(t) < gi(t), i = 1,...,v
для любых t ≥ 0,
где gi(t) и gi(t)
ограниченные функции вместе со своими первыми произ-
водными по времени. Данные функции выбираются разработчиком исходя
из требований работы системы. Например, при управлении электрическим
генератором [17] требуется поддержание частоты w(t) и выходного напряже-
ния V (t) в заданных пределах: w < w(t) < w и V < V (t) < V .
3. Метод решения. Основной результат
Введем замену выходной переменной y в виде
(3)
y(t) = Φ(ε(t), t),
где ε(t) ∈ Rv непрерывно-дифференцируемая вектор-функция по t, функ-
ция Φ(ε, t) = col {Φ1(ε, t), . . . , Φv(ε, t)} удовлетворяет следующим условиям:
(а) gi(t) < Φi(ε, t) < gi(t), i = 1, . . . , v для любых t ≥ 0 и ε ∈ Rv;
123
2,0
e
S(e) =--
+ 1
|e| + 1
1,5
1,5ee + 0,5
S(e) =
---------
ee + 1
1,0
0,5
0
-5
0
5
e
ε
1,5eε + 0,5
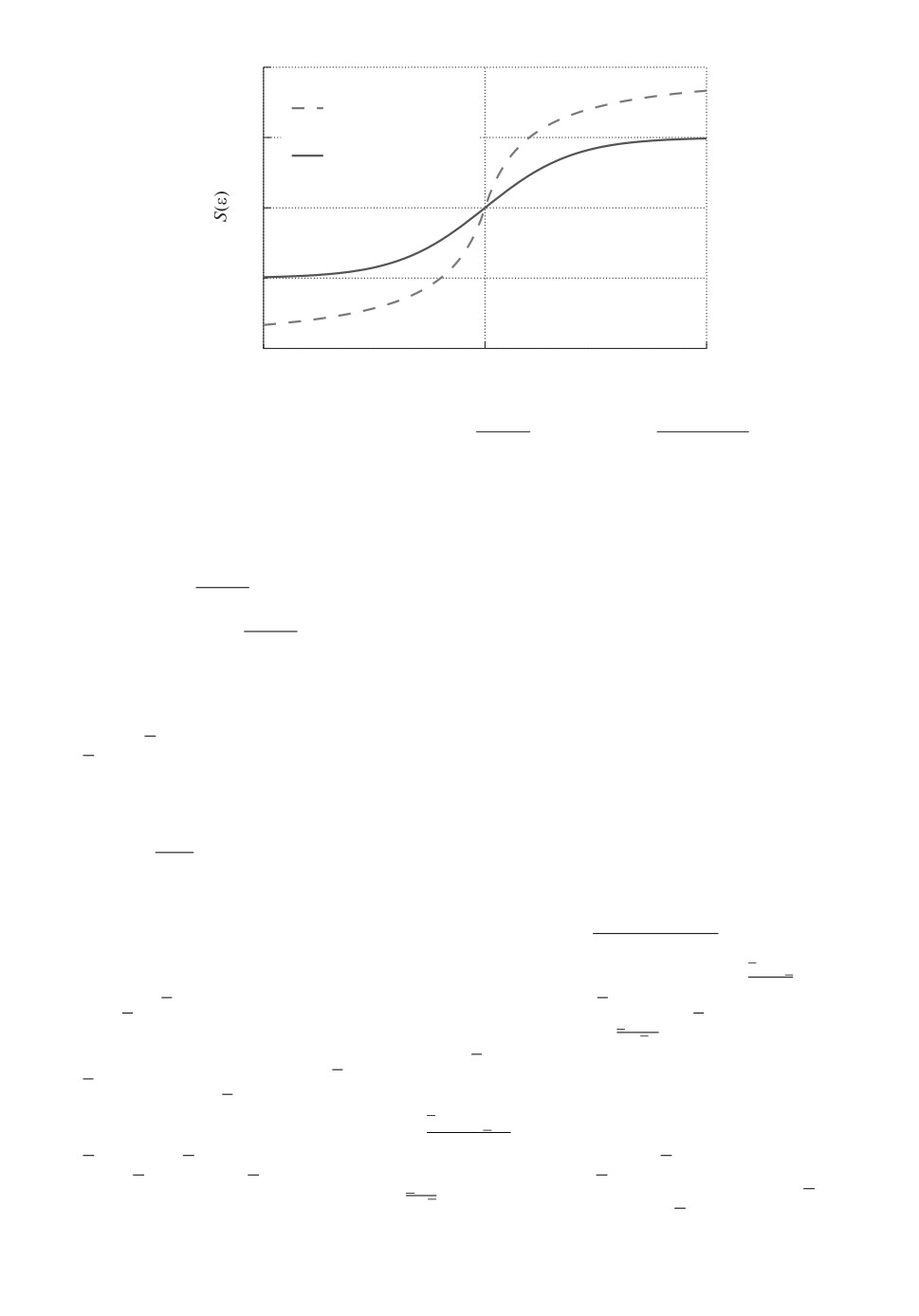
Рис. 1. Примеры функции S(ε) =
+ 1 и S(ε) =
1 + |ε|
eε + 1
(б) существует обратное отображение ε = Φ-1(y, t) для любых y ∈ Y и
t ≥ 0;
(в) функция Φ(ε, t) непрерывно-дифференцируемая по ε и t, а также
(
)
∂Φ(ε,t)
det
= 0 для любых y ∈ Y и t ≥ 0;
∂ε
(г) функция∂Φ(ε,t)∂t ограничена по t ≥ 0 для любых ε ∈ Rv.
Приведем четыре примера функции Φ(ε, t), где в примерах 1 и 2 верхняя
и нижняя границы множества будут зависеть от одной функции g(t), а в
примерах 3 и 4 границы множества будут заданы независимыми функциями
g(t) и g(t).
Пример 1. Пусть Φ(ε,t) = g(t)S(ε), где в данном случае функция S(ε) ∈
∈ R определяет замену координат, а функция g(t) ∈ R задает качество пере-
ходных процессов. Дополнительно, g(t) = 0 и ġ(t) ограниченные функции,
S(ε) =ε1+|ε| + r (см. пример функции S(ε) на рис. 1 для r = 1). Так как из (3)
y(t) = g(t)S(ε), то переменная y(t) содержится в множестве (r - 1)g(t) <
< y(t) < (r+1)g(t) при g(t) > 0 или в множестве (r+1)g(t) < y(t) < (r-1)g(t)
y-rg
при g(t) < 0. Обратное отображение имеет вид ε =
g-(y-rg) sign(ε)
Пример 2. Зададим в примере 1 функцию S(ε) в виде S(ε) = reε+reε+1 , где
0 < r < r (см. пример функции S(ε) на рис. 1 для r = 1,5 и r = 0,5). Тогда
из (3) обратное преобразование выглядит как ε = lnrg-yy-rg . Переменная y(t)
находится в множестве rg(t) < y(t) < rg(t) при g(t) > 0 или в множестве
rg(t) < y(t) < rg(t) при g(t) < 0.
, где Φ(ε, t) ∈ R, ε ∈ R, функции
1
g(t), g(t), ġ(t)и ġ(t) ограниченные для любого t и g(t) < g(t). С учетом (3)
обратное преобразование ε = lng-yy-g будет выполнено при g(t) < y(t) < g(t)
для любых t.
124
Пример 4. Зададим Φ(ε,t) в виде
{
g(t) + 0,5(g(t) - g(t))e-ε, ε ≥ 0,
Φ(ε, t) =
g(t) + 0,5(g(t) - g(t))eε,
ε < 0,
где остальные функции, как и в примере 3. Принимая во внимание (3), об-
ратное преобразование примет вид
g-g
ln
,
0≤y<g,
2(g - y)
ε=
2(y - g
ln
,
g < y < 0.
g-g
Значит, g(t) < y(t) < g(t) для любых t.
Теперь определим динамику по переменной ε для исследования устойчиво-
сти замкнутой системы. Для этого найдем по(ную п)изводную по времени
∂Φ(ε,t)
от (3) в виде y =∂Φ(ε,t)∂ε ε +∂Φ(ε,t)∂t . Так как det
= 0 (см. условие (в)),
∂ε
то перепишем последнее равенство как
)
)-1 (
(∂Φ(ε,t)
∂Φ(ε,t)
(4)
ε=
y-
∂ε
∂t
Выражение (4) содержит сигнал управления u(t), так как y =∂h(x)∂x F (x, u, t)
из (1). Теперь сформулируем основной результат статьи.
Теорема 1. Пусть для преобразования (3) выполнены условия (а)-(г).
Если существует такой закон управления u, что решения (4) ограничены,
то y(t) ∈ Yα ⊂ Y. Если при выбранном законе управления решения (4) неогра-
ниченны, то y(t) ∈ Y.
Доказательство. Пусть выбран закон управления так, что решения
уравнения (4) ограничены, т.е. |ε(t)| < N при любом t, где 0 < N < ∞. Тогда
в силу преобразования (3) и условия (а) следует, что
{
}
y∈Yα =
y ∈ Rv : Mi(t) < yi(t) < Mi(t), i = 1,...,v
,
где Mi(t) = inf {Φi(ε, t)} и Mi(t) = sup {Φi(ε, t)} для любых t ≥ 0. Посколь-
|ε|<N
|ε|<N
ку (3) является взаимно однозначным отображением, то Mi(t) < gi(t) и
Mi(t) > gi(t), значит, Yα ⊂ Y. Пусть теперь закон управления не обеспечи-
вает ограниченность решения (4), т.е. ε(t) ∈ Rv. Тогда в силу преобразова-
ния (3), а также условий (а) и (2) имеем, что y ∈ Y, где gi(t) = inf
{Φi(ε, t)}
ε∈Rv
и gi(t) = sup{Φi(ε,t)}. Теорема 1 доказана.
ε∈Rv
Теорема 1 позволяет перейти от задачи управления (1) с ограничения-
ми (2) к задаче управления (4) без ограничений. Следующие разделы демон-
стрируют возможность применения предложенного метода для некоторых
типов задач.
125
4. Управление линейным объектом с известными параметрами и
измеряемым вектором состояния в условиях возмущений
Пусть объект управления описывается следующим линейным дифферен-
циальным уравнением:
x = Ax + Bu + Df,
(5)
y = Lx.
Здесь x ∈ Rn, u ∈ R, y ∈ R, f ∈ Rl неизвестное ограниченное возмущение,
матрицы A ∈ Rn×n, B ∈ Rn и L ∈ R1×n известны, а матрица D ∈ Rn×l неиз-
вестна. Пара (A, B) управляема и пара (L, A) наблюдаема. Объект (5) имеет
относительную степень, равную единице (LB = 0 [10]).
Сформулируем результат, который содержит ¾простейший¿ закон управ-
ления в смысле ¾удобства¿ анализа замкнутой системы на устойчивость.
Теорема 2. Предположим, что для преобразования (3) выполнены усло-
вия (а)-(г),∂Φ(ε,t)∂ε > 0 для любых ε и t, а также существует вектор T ∈ Rn
такой, что матрица A - B(LB)-1LA - T L гурвицева. Тогда для любого
K > 0 закон управления
(6)
u = -(LB)-1
[LAx + Kε]
обеспечивает выполнение целевого условия (2).
Замечание 1. Отметим, что модель (5) с гурвицевой матрицей A-
-B(LB)-1LA - TL может описывать ряд технических систем. Например,
дистилляционная колонна [18], [4, с. 569], где сигнал управления расход
орошения, а регулируемый сигнал состав легких фракций верха колонны;
летательный аппарат [4, с. 565] на различных высотах и числах Маха, где u
управление рулями высоты, y вертикальное ускорение; электрический дви-
гатель постоянного тока [19], где сигнал управления входное напряжение,
выходной сигнал угловая скорость, и т.д.
Доказательство. Принимая во внимание преобразование (3) и урав-
нение объекта (5), перепишем выражение (4) в виде
)-1
(∂Φ(ε,t)
(7)
ε=
(LAx + LBu + ψ) ,
∂ε
где ψ = LDf -∂Φ(ε,t)∂t
ограниченная функция по ε и t. Подставив закон
управления (6) в первое уравнение (5) и уравнение (7), а также добавив в по-
лученном выражении слагаемое T Φ(ε, t) - T Lx(t) = 0 (которое справедливо
в силу (3) и второго уравнения (5)), получим
(8)
x = (A - B(LB)-1LA - TL)x - KB(LB)-1
ε + Df + TΦ(ε,t),
)-1
(∂Φ(ε,t)
(9)
ε=
[-Kε + ψ] .
∂ε
126
Введение вектора T позволяет рассматривать неустойчивые объекты (5). Ис-
следуем уравнение (9) на устойчивость по вход-состоянию. Для этого выберем
функцию Ляпунова вида V = 0,5ε2. Подставив (9) в условие
)-1
(∂Φ(ε,t)
(∂Φ(ε,t))-1
V
+ 2αV
- βψ2
≤ 0, где α > 0 и β > 0,
∂ε
∂ε
[
][
]
-K + α 0,5
ε
получим -(K - α)ε2 + εψ - βψ2 ≤ 0 или в виде [ε ψ]
≤ 0.
0,5
-β ψ
[
]
-K + α 0,5
Последнее неравенство будет выполнено, если матрица
будет
0,5
-β
отрицательно определенной, что равносильно выполнению условий K > α и
(K - α)β > 0,25. Поскольку K заданное число, то для него всегда найдутся
α и β такие, что данные условия будут выполнены. Значит, сигнал ε(t) бу-
дет ограниченным. Если матрица A - B(LB)-1LA - T L гурвицева, то в силу
ограниченности функций ε(t), Φ(ε, t) и f(t) сигнал x(t) будет ограниченным.
Значит, закон управления u, определенный в (6), будет ограничен. Тогда из
теоремы 1 следует, что целевое условие (2) будет выполнено. Теорема 2 до-
казана.
Пример 5. Продемонстрируем теперь качество переходных процессов на
примере управления объектом, параметры которого заданы в виде
[
]
[
]
[
]
[
]
0
1
0
1
]
2
A=
,
B=
,
D=
,
L=
[1
2
,
x(0) =
,
1
2
1
1
1
(10)
(
)
d(t)
f (t) = 0,1 + sin(3t) + sat
,
0,3
где sat(·) функция насыщения, сигнал d(t) смоделирован в Matlab Simulink
с помощью блока “Band-Limited White Noise” с мощностью шума 0,1 и вре-
менем выборки 0,1. Требуется обеспечить принадлежность выходного сиг-
нала y(t) множеству rg(t) < y(t) < rg(t), где r = 0,8 и r = 1, а функция g(t)
будет определена ниже.
Матрица A - B(LB)-1LA - T L гурвицева, например, при любом T =
= [T1 T2]T, где T1 > 0 и T2 > 0. Зададим K = 1 в (6). Определим функ-
цию Φ(ε, t), как в примере 2, задав g(t) в виде
(11)
g(t) = (g0 - g∞)e-kt + g∞.
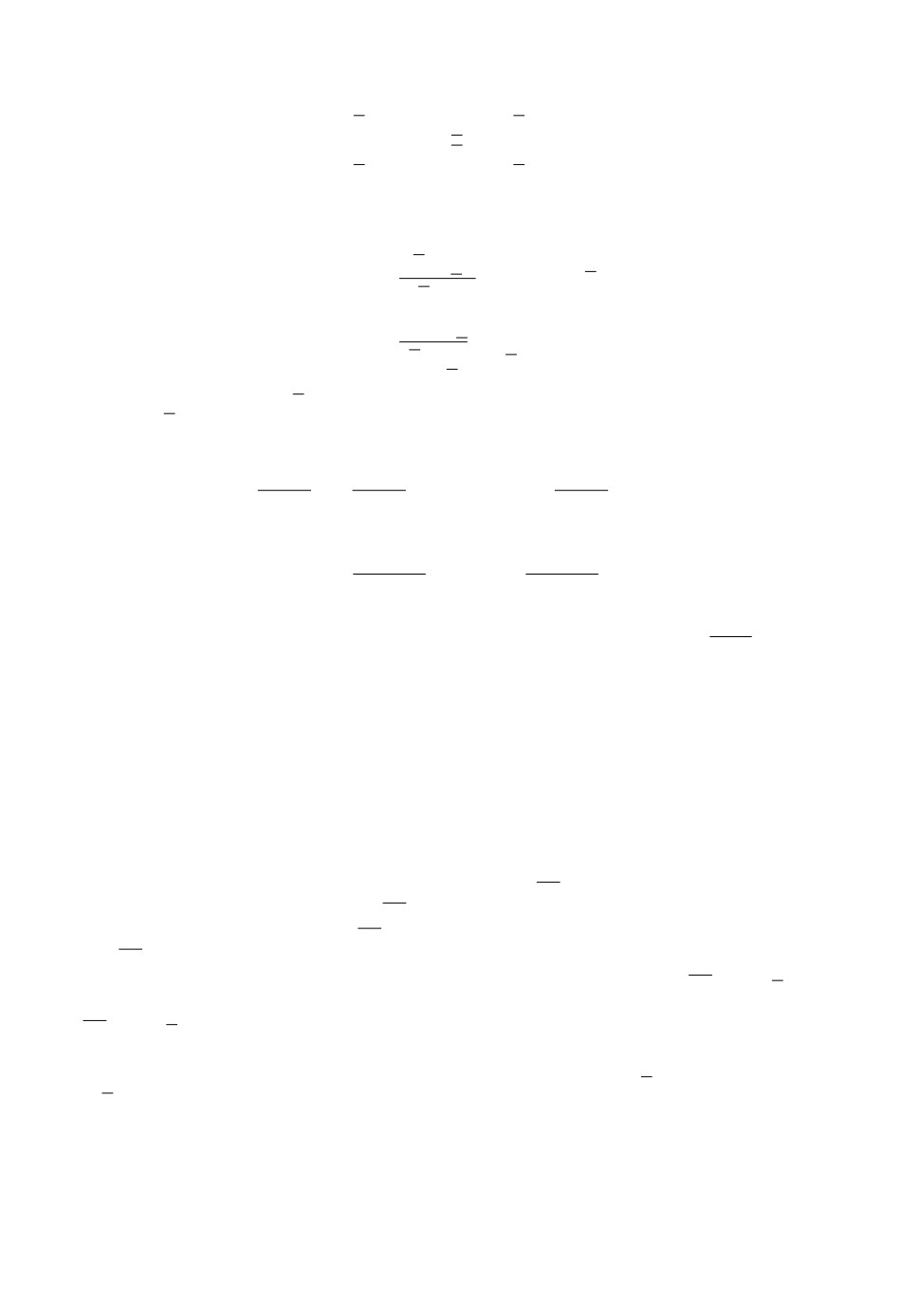
Здесь g0 = y(0) + 0,01, g∞ = 0,1 и k = 0,5. На рис. 2 приведены результаты
переходных процессов по y(t), u(t) и f(t). Колебания сигнала управления
на рис. 2 вызваны наличием возмущения f. Причем, как видно из рис. 2
(справа), после 3 с с начала работы системы амплитуда колебаний сигнала
управления соизмерима с величиной возмущения. На рис. 3 представлены
результаты моделирования при отсутствии возмущения (f = 0). Таким обра-
зом, для стабилизации объекта в заданном множестве не требуется большого
значения управляющего сигнала.
127
5
2
1,60
4
1,55
0
3
1
,4
1,5
1,6
-2
y(t)
2
-
rg(t)
-4
u(t)
rg(t)
f(t)
1
-6
-8
0
5
10
15
20
0
5
10
15
20
t
t
Рис. 2. Переходные процессы по y(t) (слева), u(t) и f(t) (справа) при g(t)
вида (11).
3
0
y(t)
2
-1
r
g(t)
u(t)
1
rg(t)
-2
-3
5
-4
4
-5
3
-6
2
1
-7
-8
2
4
6
8
10
0
5
10
15
20
t
t
Рис. 3. Переходные процессы по y(t) (слева) и u(t) (справа) для g(t) вида (12)
при отсутствии возмущения (f = 0).
6
4
y(t)
4
2
rg(t)
u(t)
2
rg(t)
0
-2
10
-4
8
-6
6
-8
4
2
-10
-12
0
5
10
15
20
0
5
10
15
20
t
t
Рис. 4. Переходные процессы по y(t) (слева) и u(t) (справа) для g(t) вида (12).
128
Отметим, что на рис. 2 (и в последующих примерах) выходные сигналы не
достигают границ желаемого множества, что согласуется с теоретическими
выводами и что читатель может легко проверить путем моделирования. Для
иллюстрации сказанного на рис. 2 приведен фрагмент рисунка в увеличенном
масштабе.
В отличие от [13] и рис. 2, 3, где границы целевого множества сходятся к
некторым числам, теперь обеспечим принадлежность выходного сигнала y(t)
ранее заданному множеству 0,8g(t) < y(t) < g(t), где функция g(t) не имеет
предела:
(12)
g(t) = g0 sin(kt) + g0 + g∞.
На рис. 4 приведены результаты моделирования по y(t) и u(t).
Из рис. 2-4 видно, что при r > 0 и r > 0 значение y = 0 недостижимо в си-
лу преобразования координат из примера 2. Нулевое значение y может быть
достигнуто только при r < 0 и r > 0 (с учетом g(t) > 0). Однако в таком слу-
чае заданное множество будет более грубым по сравнению с множествами из
рис. 2-4, поскольку нижняя граница желаемого множества будет находиться
в отрицательной области значений y. Данная проблема будет преодолена в
последующих примерах при использовании замены координат из примера 3.
5. Управление объектом по выходу с секторной нелинейностью
в условиях возмущений
Рассмотрим объект управления вида
x = Ax + Gϕ(x) + Bu + Df,
(13)
y = Lx.
Здесь x ∈ Rn, u ∈ Rm, y ∈ Rv (v ≤ m), f ∈ Rl неизвестная ограниченная
функция, A ∈ Rn×n, G ∈ Rn×k, B ∈ Rn×m, D ∈ Rn×l и L ∈ Rv×n извест-
ные матрицы, неизвестная нелинейность ϕ(x) ∈ Rk удовлетворяет условию
|ϕ(x)| ≤ C|x|, C > 0 известная константа. Пара (A, B) управляема и па-
ра (L, A) наблюдаема. Объект (13) имеет строгую относительную степень
(от англ. ¾strict relative degree¿), равную единице (т.е. LiBj = 0, где Li
i-я строка матрицы L и Bj i-я строка матрицы B, i, j = 1, . . . , n [20, 21]).
Требуется разработать алгоритм управления, обеспечивающий выполнение
целевого условия (2).
Зададим закон управления в виде
(14)
u=K1y+K2
ε,
где K1 ∈ Rm×v и K2 ∈ Rm×v выбираются разработчиком. В частности, K1
и K2 можно выбирать при условии, что матрицы A + BK1L и LBK2 гур-
вицевы. Принимая во внимание (3) и (14), а также добавив в полученном
выражении слагаемые T1Lx - T1Φ(ε, t) = 0 и T2Lx - T2Φ(ε, t) = 0 (которые
129
справедливы в силу (3) и второго уравнения (13)), перепишем (4) и (13) в
виде
x = (A + BK1L + T1L)x + BK2ε + Gϕ(x) + Df - T1Φ(ε,t),
)-1 [
(∂Φ(ε,t)
ε=
LBK2ε + (LA + LBK1L + T2L)x +
(15)
∂ε
]
∂Φ(ε,t)
+ LGϕ(x) + LDf -
- T2Φ(ε,t)
∂t
Здесь T1 ∈ Rn×v, T2 ∈ Rv×v, I единичная матрица. Введение матриц T1 и
T2 позволяет исследовать неустойчивые объекты (13).
Из второго уравнения (15) следует, что условие v ≤ m (т.е. dim ε ≤ dim u)
и единичная строгая относительная степень (13) позволит закону управле-
ния (14) обеспечить ограниченность ε(t). Введем новые обозначения
{
}
∂Φ(ε,t)
xe = col {x, ε}, fe = col f,
, Φ(ε,t)
,
∂t
A+BK1L+T1L
BK2
Ae(ε,t) =
(∂Φ(ε,t))-1
(∂Φ(ε,t))-1
,
(LA + LBK1L + T2L)
LBK2
∂ε
∂ε
(16)
G
Ge(ε, t) =
(∂Φ(ε,t))-1
,
LG
∂ε
D
0
-T1
De(ε,t) =
(∂Φ(ε,t))-1
(∂Φ(ε,t))-1
(∂Φ(ε,t))-1
LD -
-
T2
∂ε
∂ε
∂ε
и перепишем (15) в виде
(17)
xe = Ae(ε,t)xe + Ge(ε,t)ϕ(x) + De(ε,t)fe.
Теорема 3. Предположим, что для преобразования (3) выполнены усло-
вия (а)-(г),∂Φ(ε,t)∂ε > 0 для любых ε и t. Пусть для заданных α > 0, K1, K2,
T1 и T2 существует коэффициент β > 0 и матрица P = PT > 0 такие, что
выполнено матричное неравенство
Ae(ε,t)TP + PAe(ε,t) + αP + C2ETE PGe(ε,t) PDe(ε, t)
(18)
∗
-1
0
≤ 0.
∗
∗
-βI
Здесь
“ ∗” определяет симметричный блок симметричной матрицы,
E = [I 0]. Тогда закон управления (14) обеспечивает выполнение целевого
условия (2).
130
Доказательство. Для анализа устойчивости (17) зададим функцию
Ляпунова в виде V = xTeP xe, где P = PT > 0. С учетом (17), подставив вы-
ражение для V в неравенство
V
(19)
+ αV - βfTe fe
≤ 0,
получим
[
]
xTe
Ae(ε,t)TP + PAe(ε,t) + αP
xe +
(20)
+ 2xTe P Ge(ε, t)ϕ(x) + 2xTe P De(ε, t)fe - βfTe fe ≤ 0.
Введем новый вектор z = col {xe, ϕ(x), fe} и перепишем неравенство (20)
в виде
Ae(ε,t)TP + PAe(ε,t) + αP PGe(ε,t) PDe(ε,t)
(21)
zT
∗
0
0
z ≤ 0.
∗
∗
-βI
По условию задачи ϕ2(x) ≤ C2xTeETExe. Перепишем данное условие в ви-
де
C2ETE
0
0
(22)
zT
∗
-1 0z ≥ 0.
∗
∗
0
Согласно S-процедуре неравенства (21) и (22) будут одновременно выполне-
ны, если будет выполнено неравенство (18). Значит, из условия (19) функ-
ция xe(t) ограничена, следовательно, сигналы x(t) и ε(t) ограничены. Тогда
закон управления (14) будет ограниченным. В силу теоремы 1 цель управле-
ния (3) будет выполнена. Теорема 3 доказана.
Пример 6. Продемонстрируем качество управления на объекте с двумя
входами и двумя выходами со следующими параметрами:
0
1
0
1
2
1
A= 0
0
1
,B= 11,D= 1,
0,1
-2 -3
1
2
1
[
]
0
0
0
2
1
1
,ϕ(x)=sin(x),
L=
,
G= 0
0
0
1
2
1
0,1
0,1
0,1
возмущение f(t) определено в (10).
[
]
0
0
Параметры регулятора (14) зададим в виде K1 = 0,01
, K2 =
−1 -1
[
]
[
]
[
]
1,5
-1,75
1
2
1
1
2
=
. Дополнительно выберем T1 =
и T2 =
−1
1
1
2
1
1
2
131
Пусть Φ(ε, t) = diag {Φ1(ε1, t), Φ2(ε2, t)}, где Φi определены, как в приме-
ре 3, т.е.
εi + g
gi(t)e
(t)
i
Φi(εi,t) =
,
i = 1,2.
eεi + 1
Значит, Φ(ε, t) > 0 для любых ε и t. Тогда
∂Φi(εi,t)
eεi(gi(t) - g
(t))
i
=
> 0,
∂εi
(eεi + 1)2
(
)-1
∂Φi(εi,t)
так как gi(t) > g
(t). Дополнительно,
→ +∞ при ε → +∞ и
i
∂εi
(
)-1
∂Φi(εi,t)
4
наименьшее значение
=
> 0. Согласно [22], если
∂εi
gi(t)-g
(t)
ε=0
i
выполнено линейное матричное неравенство в вершинах политопа, то и
внутри политопа линейное матричное неравенство будет выполнено. В рас-
сматриваемом случае при каждом фиксированном∂Φi(εi,t) матричное нера-∂ε
i
венство (18) является линейным. Однако политоп не замкнутый, так как
(
)-1
∂Φi(εi,t)
→ +∞ при ε → +∞. Численное моделирование при увеличении
∂εi
(
)-1
∂Φi(εi,t)
показало, что собственные числа матрицы P сходятся к некото-
∂εi
4
рым положительным значениям. В вершинах
матричное неравен-
gi(t)-g
(t)
i
ство (18) также выполнено.
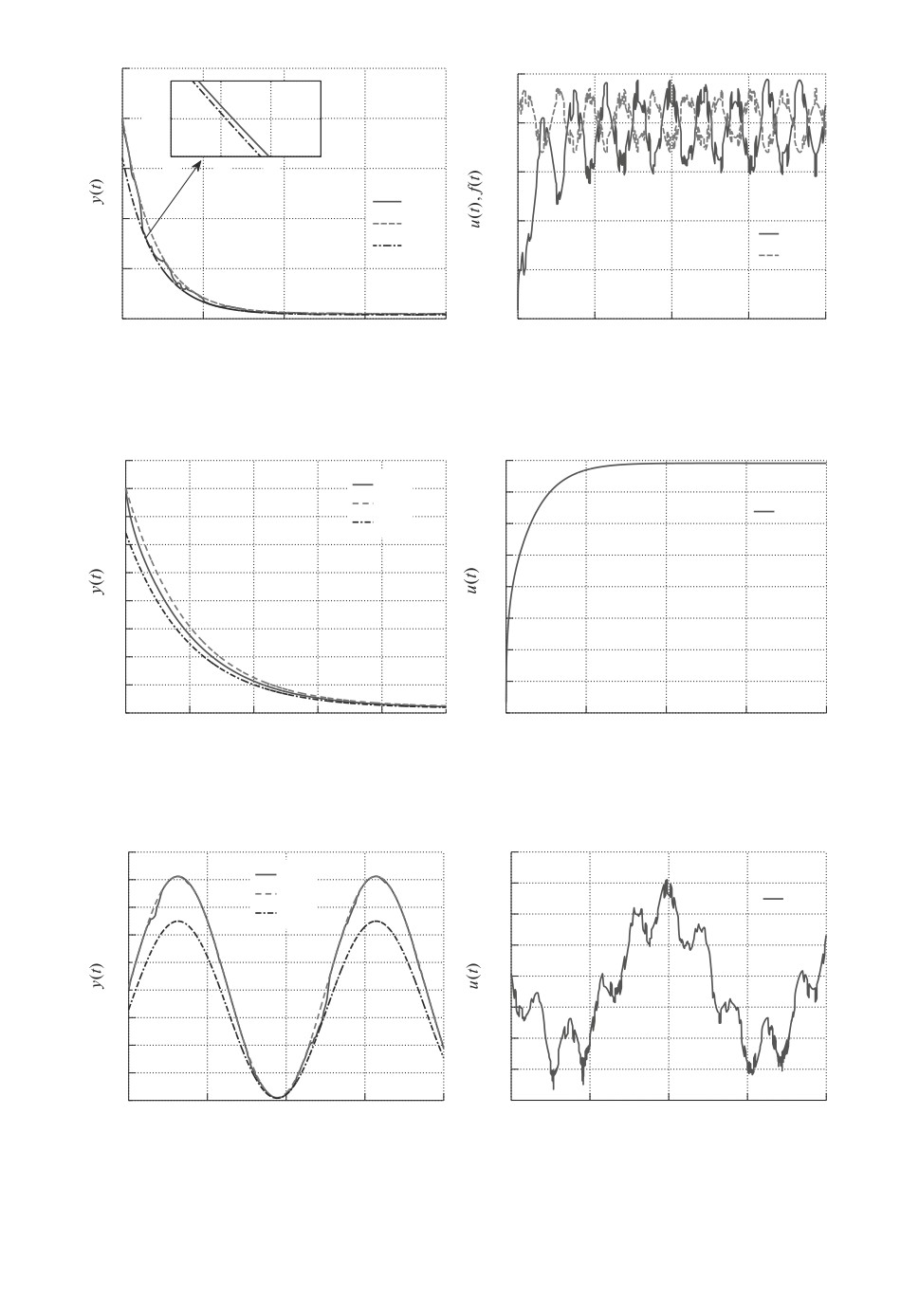
Зададим параметры функции Φ(ε, t) в виде
g1(t) = (g0 - g1)e-kt + g1,
g2(t) = (g0 - g2)cos(kt) + g4,
(23)
g1(t) = (g0 - g2)e-kt + g3,
g2(t) = cos(kt) + g5,
√
где g0 =
yT(0)y(0) + 0,01, g1 = 0,1, g2 = 2, g3 = -0,2, g4 = g0 - 0,1, g5 = 0,8
и k = 0,5.
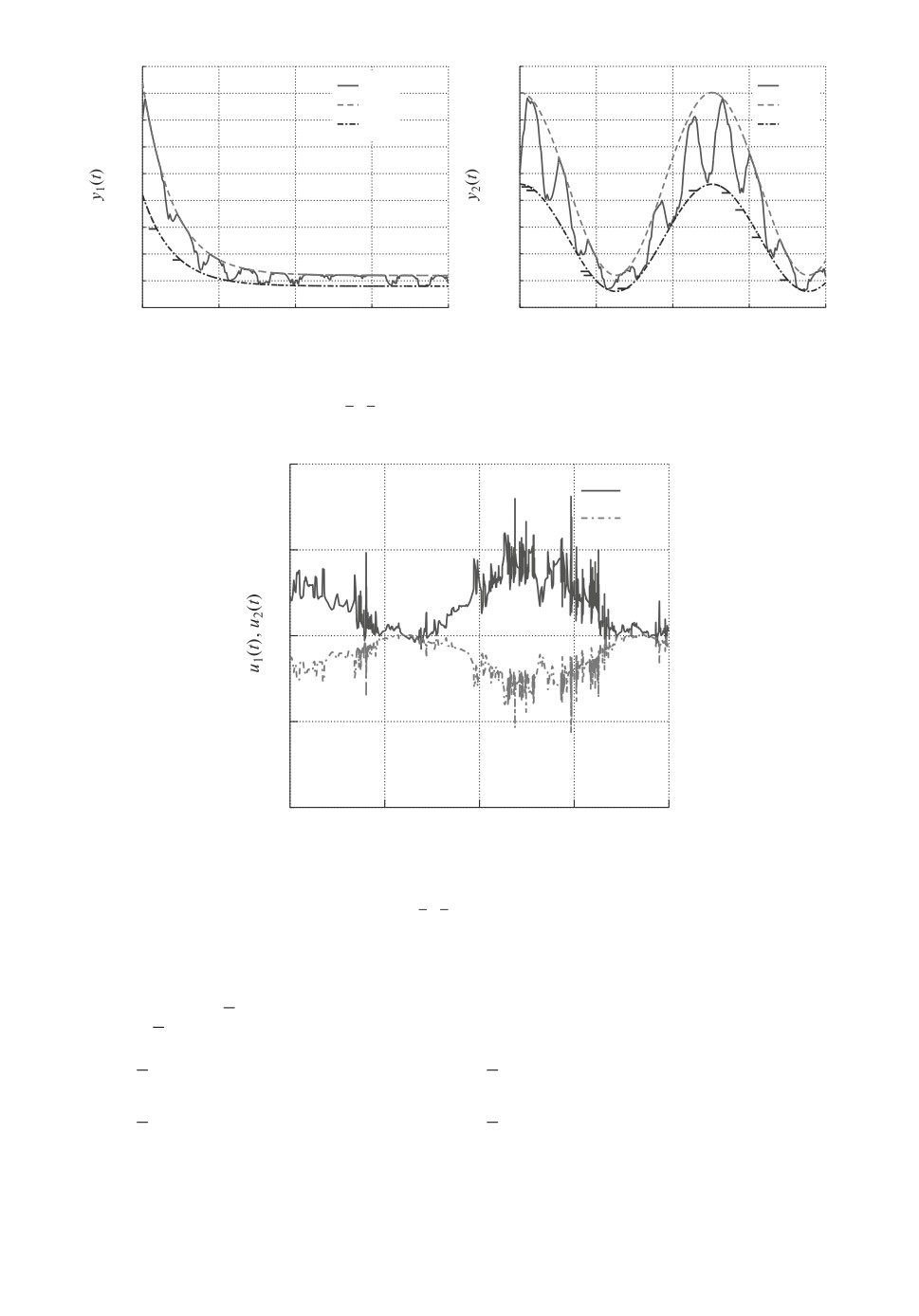
На рис. 5, 6 приведены результаты переходных процессов по y1(t) , y2(t) и
u(t) = col {u1(t), u2(t)} при x(0) = col {53 ,23 , -1}.
Исследования робастности замкнутой системы с законом управления u =
= K1y + K2ε по отношению к параметрам объекта (5) путем моделирования
показали, что замкнутая система соханяет устчивостьи обеспечива вы-
0
1
0
0
0
0
полнение цели управления при A = 0
0
1
и G= 0
0
0
,где
a1
a2
a3
gϕ1
gϕ2
gϕ3
a1 ∈ [-5;0,1], a2 ∈ [-5;-2], a3 ∈ [-5;-3], b∈ [0,5;10] и gϕ1 ∈ [-3;3], gϕ2 ∈ [-3;3]
и gϕ3 ∈[-3;3].
Исследование робастности по отношению к начальным значениям объекта
показало следующее. Согласно условиям (3) и (a) начальные значения yi(0)
должны быть согласованы с неравенствами gi(0) < yi(0) < gi(0), i = 1, 2. Од-
нако начальные условия могут иметь существенную неопределенность, и ес-
ли они оказались на границе заданной области или за ее пределами, то закон
132
4,0
4,0
y1(t)
y2(t)
3,5
g
3,5
g
1(t)
2(t)
3,0
g1(t)
3,0
g2(t)
2,5
2,5
2,0
2,0
1,5
1,5
1,0
1,0
0,5
0,5
0
0
-0,5
-0,5
0
5
10
15
20
0
5
10
15
20
t
t
Рис. 5. Переходные процессы по y1(t) и y2(t) для функции Φ(ε, t) с парамет-
рами (23) при x(0) = col {53 ,23 , -1}.
20
u1(t)
u2(t)
10
0
-10
-20
0
5
10
15
20
t
Рис. 6. Переходные процессы по u(t) = col {u1(t), u2(t)} для функции Φ(ε, t) с
параметрами (23) при x(0) = col {53 ,23 , -1}.
управления будет неработоспособным в силу того, что обратная функция не
существует при таких значениях (см. пример 3). Для решения данной про-
блемы gi(t) и gi(t) в (23) можно задавать c ¾запасом¿ в начальный момент
времени, например в виде
g1(t)=(g0 -g1)e-kt +g1 +g6e-k0t, g2(t)=(g0 -g2)cos(kt)+g4 +g6e-k0t,
(24)
g1(t)=(g0 -g2)e-kt +g3 -g6e-k0t, g2(t)=cos(kt)+g5 -g6e-k0t,
где g6 > 0 и k0 > 0. Причем для покрытия большой области начальных зна-
чений с обеспечением нахождения выходных переменных объекта в множе-
стве (23) необходимо g6 и k0 выбирать достаточно большими числами. Ре-
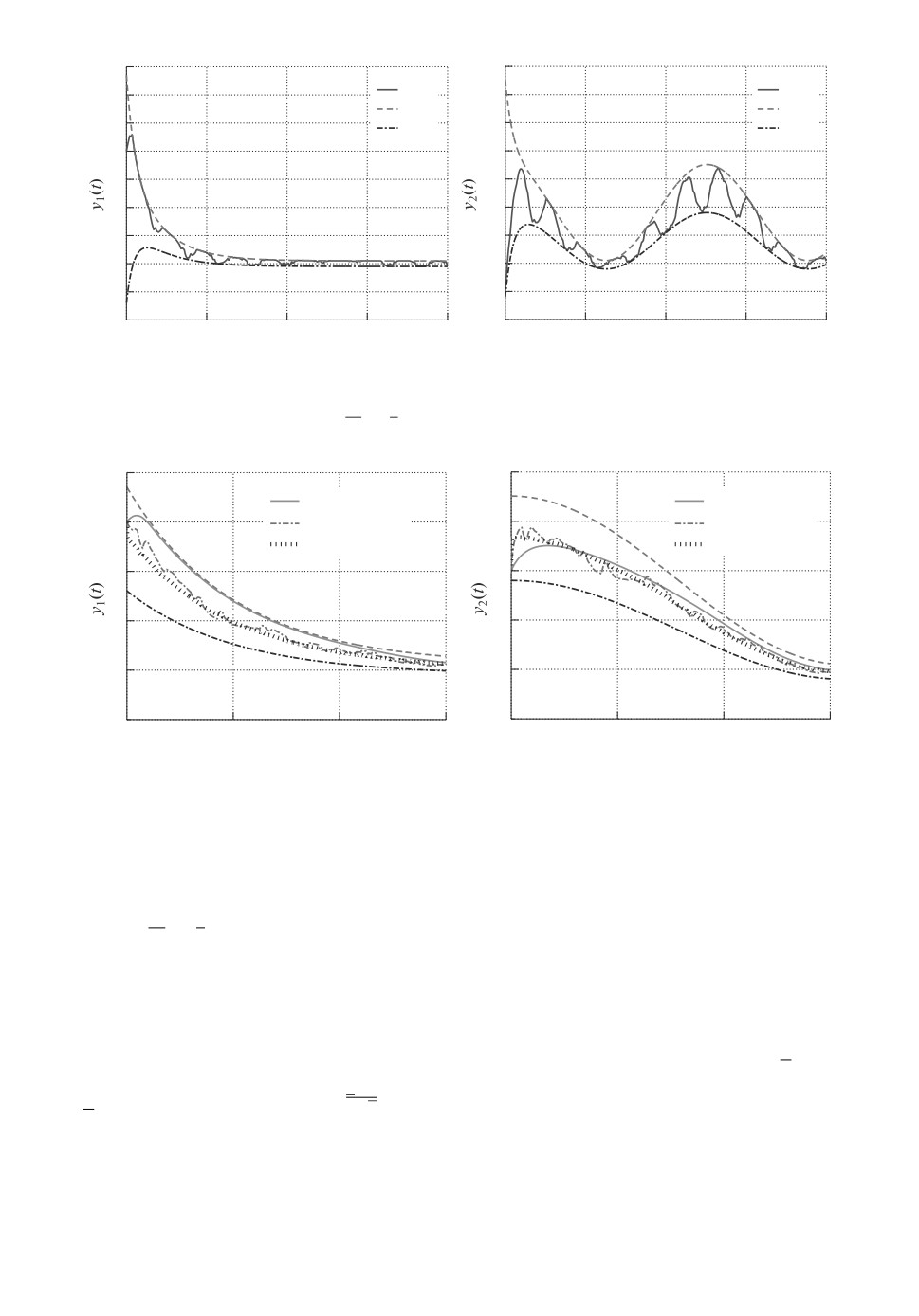
зультаты моделирования по выходным сигналам y1(t) и y2(t) представлены
133
7
7
y1(t)
y2(t)
6
g
6
g
1(t)
2(t)
5
5
g1(t)
g2(t)
4
4
3
3
2
2
1
1
0
0
-1
-1
-2
-20
5
10
15
20
0
5
10
15
20
t
t
Рис. 7. Переходные процессы по y1(t) и y2(t) для функции Φ(ε, t) с парамет-
рами (24) при x(0) = col {103 , -53 , -1}.
4
4
y1(t) : g = 1
y2(t) : g = 1
3
y1(t) : g = 10
3
y2(t) : g = 10
y1(t) : g = 100
y2(t) : g = 100
2
2
1
1
0
0
-1
-1
0
2
4
6
0
2
4
6
t
t
Рис. 8. Переходные процессы по y1(t) и y2(t) при γ = 1, γ = 10 и γ = 100 при
x(0) = col {1 1 0}.
на рис. 7 при g6 = 3 и k0 = 2 (значения g6 и k0 не выбраны достаточно больши-
ми числами для иллюстрации результата на рисунке) в (24), а также x(0) =
= col {103 , -53 , -1}.
Анализ результатов моделирования также показал, что если:
1) время переходного процесса по y(t) соизмеримо со временем переходного
процесса по ε(t);
2) функция |f(t)| принимает большие значения,
то переходные процессы по y могут протекать почти на границах g(t) и
g(t). Из выражения ε = lng-yy-g следует, что величина |ε(t)| может принимать
большие значения, а значит, возрастет вычислительная нагрузка на систему
управления. В результате увеличивается работа Matlab/Simulink, а иногда
Matlab/Simulink выдает ошибку в вычислениях. Для предотвращения дан-
ной проблемы рекомендуется выбирать настраиваемые параметры так, что-
бы переходные процессы по ε(t) протекали быстрее, чем по y(t). Это также
134
позволит повысить робастность по отношению к параметрической неопреде-
ленности в объекте и влиянию возмущения f. Так, из рис. 8 видно, что при
увеличении γ > 0 в законе управления u = K1y + γK2ε переходные процессы
по y отдаляются от границ g(t) и g(t).
6. Динамический регулятор для объектов со скалярным входным и
выходным сигналами и произвольной относительной степенью
Результаты разделов 4 и 5 справедливы при относительной степени объек-
та, не превышающей единицы. Хорошо известно, что управление объектами
со скалярными входными и выходными сигналами и с произвольной отно-
сительной степенью в условиях параметрической неопределенности является
сложной задачей относительно обоснования работоспособности алгоритма,
см., например, [23, 24]. Поскольку основная цель статьи обеспечение целе-
вого условия (2) с применением нового преобразования (3), то в настоящем
разделе ради простоты выводов рассматривается объект со скалярными вход-
ным и выходным сигналами и с известными параметрами, но с произвольной
относительной степенью. В численном примере будет продемонстрирована
работоспособность алгоритма по отношению к параметрической неопреде-
ленности.
Пусть объект управления описывается уравнением
(25)
Q(p)y(t) = R(p)u(t) + f(t).
Здесь y ∈ R выходной сигнал, u ∈ R сигнал управления, f ∈ R ограни-
ченное возмущение, Q(p) и R(p) линейные дифференциальные операторы с
известными коэффициентами, Q(λ) гурвицевый полином, λ комплексная
переменная, p =ddt оператор дифференцирования. Требуется разработать
алгоритм управления, обеспечивающий выполнение целевого условия (2).
Подставив y(t) из (25) в (4), получим
)
(∂Φ(ε,t))-1 (pR(p)
pD(p)
∂Φ(ε,t)
(26)
ε=
u(t) +
f (t) -
∂ε
Q(p)
Q(p)
∂t
Закон управления u = -Q(p)pR(p) Kε, где K > 0, позволил бы свести уравне-
(
)-1 (
)
∂Φ(ε,t)
ние (26) к виду ε =
-Kε +pD(p)Q(p)f(t) -∂Φ(ε,t)
, решение которо-
∂ε
∂t
го было бы ограниченным при∂Φ(ε,t)∂ε > 0. Обозначим относительную степень
объекта (25) через ρ = deg Q(p) - deg R(p). Тогда приведенный закон управ-
ления не реализуем при ρ > 1 из-за требований к наличию ρ - 1 производных
от сигнала ε(t). Поэтому зададим закон управления в виде
Q(p)
(27)
u=-
Kε.
R(p)[p(µp + 1)ρ-1 + aµ]
Здесь достаточно малое число µ > 0 и коэффициент a > 0 выбираются из
условия гурвицевости полинома λ(µλ + 1)ρ-1 + aµ. Учитывая (27), перепи-
135
шем (25) и (26) как
1
D(p)
(28)
y(t) = -K
ε(t) +
f (t),
p(µp + 1)ρ-1 + aµ
Q(p)
)-1 (
)
(∂Φ(ε,t)
p - p(µp + 1)ρ-1
- aµ
(29)
ε=
-Kε - K
ε+φ
,
∂ε
p(µp + 1)ρ-1 + aµ
где φ =pD(p)Q(p) f(t) -∂Φ(ε,t)∂t
ограниченная функция.
Теорема 4. Пусть для преобразования (3) выполнены условия (а)-(г),
∂Φ(ε,t)
> 0 для любых ε и t. Тогда существуют коэффициенты µ0 и a такие,
∂ε
что при µ < µ0 полином λ(µλ + 1)ρ-1 + aµ гурвицев и закон управления (27)
обеспечивает выполнение целевого условия (2).
Доказательство. Рассмотрим уравнение (29), которое является регу-
лярно возмущенным при малом параметре µ. Перепишем (29) при µ = 0 в
виде
)-1
(∂Φ(ε,t)
ε=
(30)
(-Kε + φ) .
∂ε
Для анализа устойчивости (30) зададим функцию Ляпунова как V = 0,5ε2.
(
)-1
(
)-1
∂Φ(ε,t)
∂Φ(ε,t)
Проверим условиеV + 2αV
-β
φ2 < 0, где α > 0 и β > 0.
∂ε
∂ε
Подставив V и (30) в последнее неравенство, получим -(K - α)ε2 + εφ -
-βφ2 < 0. Данное неравенство будет выполнено при выполнении условия
K > α и (K - α)β > 0,25 (см. доказательство теоремы 2). Поскольку α и β
произвольные числа, то всегда можно обеспечить выполнение данных усло-
вий при заданном K. Следовательно, решение уравнения (30) предельно
ограниченное. Значит, согласно теореме 2.2 из [25] существует µ0 такое, что
при µ < µ0 выполнено условие |ε(t) - ε(t)| < O(µ), где limµ→0 O(µ) = 0. В ре-
зультате при µ < µ0 решение уравнения (29) также предельно ограничен-
ное. Тогда в силу ограниченности f(t) и ε(t), а также гурвицевости Q(λ)
и λ(µλ + 1)ρ-1 + aµ сигнал y(t) будет ограниченным из (28). Значит, закон
управления u будет ограничен из (27). Тогда из теоремы 1 следует, что целе-
вое условие (3) будет выполнено. Теорема 4 доказана.
Пример 7. Пусть параметры объекта управления (25) определены в виде
Q(p) = (p + 1)3, R(p) = 1 и возмущение f(t) задано в (10).
Параметры регулятора (14) зададим в виде K = 3, µ = 0,01 и a = 0,1. То-
гда закон управления (27) будет выглядеть как
3
3(p + 1)
(31)
u=-
ε.
p(0,01p + 1)2 + 10-3
и
1
{
{
2 cos(t) + 0,2,
0 ≤ t ≤ 2π,
2 cos(t) - 0,2,
0 ≤ t ≤ 2π,
g(t) =
g(t) =
2,2,
t > 2π;
1,8,
t > 2π.
136
3
2
1
y(t)
g
(t)
0
g(t)
-1
-2
-3
0
5
10
15
20
t
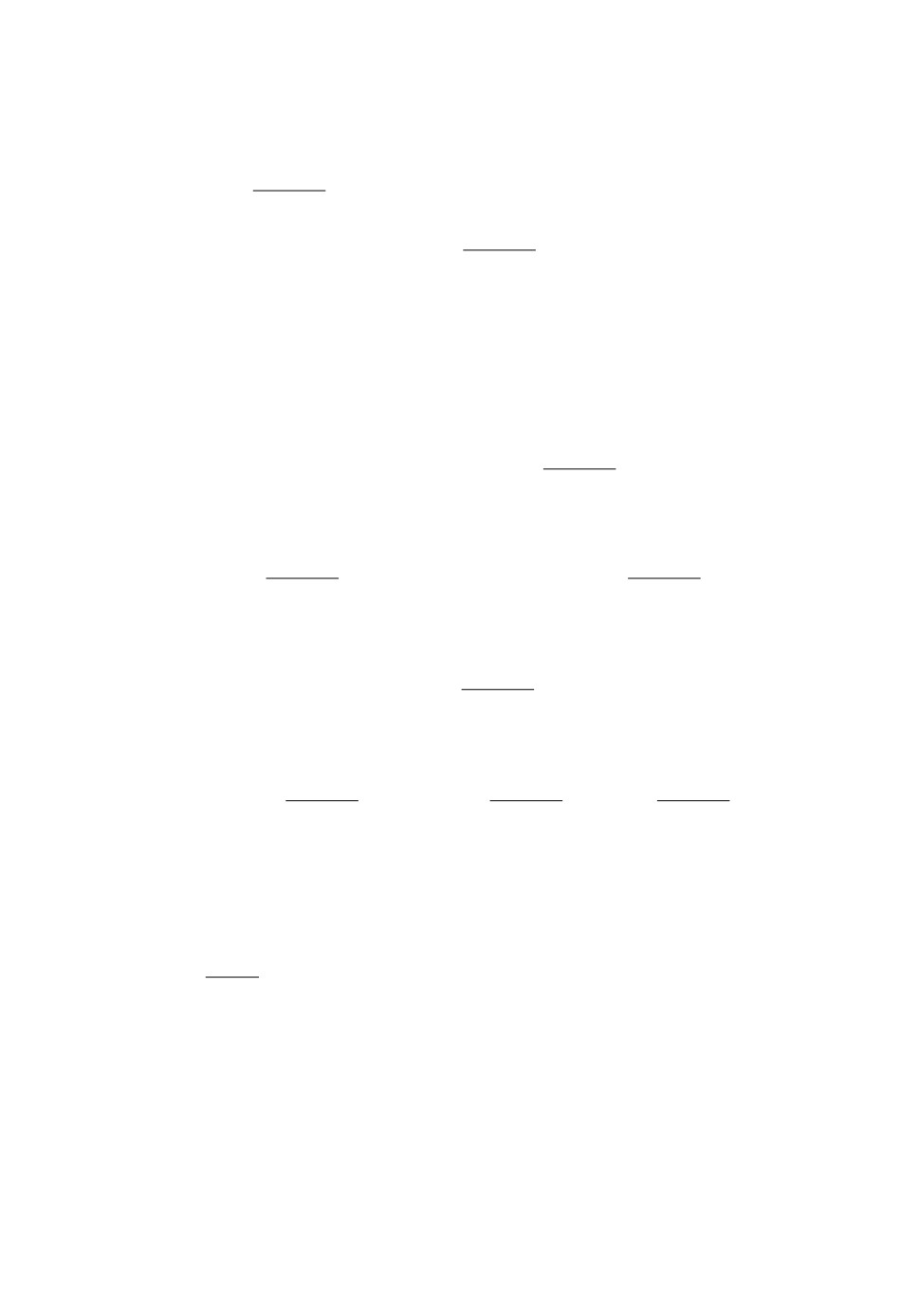
Рис. 9. Переходные процессы по y(t).
500
u(t)
0
5
0
-5
10
1
5
20
-500
0
5
10
15
20
t
Рис. 10. График сигнала u(t).
Результаты моделирования показали, что закон управления (31) обеспечива-
ет цель управления (2). Моделирование также показало, что замкнутая си-
стема робастна по отношению к параметрическим неопределенностям. Так,
на рис. 9, 10 приведены результаты переходных процессов по y(t) и u(t) при
y(0) = 2, py(0) = p2y(0) = 1, неустойчивом полиноме Q(λ) = (λ - 1)3 и регу-
ляторе (31). Начальные всплески сигнала управления обусловлены рассогла-
сованием начальных условий в регуляторе и в объекте управления. Однако
после отработки регулятором рассогласования начальных условий дальней-
ший график управления принимает ¾небольшие¿ значения, которые соответ-
ствуют выходному сигналу в заданном множестве.
7. Заключение
Разработан новый метод управления динамическими системами, позво-
ляющий гарантировать нахождение выходной переменной объекта управле-
137
ния в заданном множестве. Для решения задачи предложена специальная
замена координат, позволяющая свести исходную задачу с ограничениями к
задаче исследования на устойчивость по вход-состоянию новой расширенной
динамической системы без ограничений. Приведены примеры замены коорди-
нат и алгоритмы управления линейными объектами и динамическими систе-
мами с секторной нелинейностью. Полученные результаты сопровождаются
моделированием, иллюстрирующим эффективность предложенного метода и
подтверждающими аналитические выводы.
Отметим, что основной результат, сформулированный в теореме 1, спра-
ведлив для объектов с произвольной размерностью входных и выходных сиг-
налов. Однако решение, полученное в разделе 5, не позволяет управлять объ-
ектами с размерностью выходного сигнала больше, чем размерность сигнала
управления. Для управления такими объектами существует ряд решений, см.,
например, [26, 27] и список литературы в них. Применение методов [26, 27]
и теоремы 1 может быть отдельным исследованием по управлению объек-
тами с размерностью выходного сигнала больше, чем размерность сигнала
управления.
СПИСОК ЛИТЕРАТУРЫ
1.
Первозванский А.А. Курс теории автоматического управления. М.: Наука, 1986.
2.
Теория автоматического управления: Учеб. для вузов по спец. “Автоматика и
телемеханика”. В 2-х ч. Под ред. А.А. Воронова. М.: Высш. шк., 1986.
3.
Поляк Б.Т., Хлебников М.В., Рапопорт Л.Б. Математическая теория автома-
тического управления, учебное пособие. М.: Ленанд, 2019.
4.
Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория кон-
струирования систем управления. М.: Высш. шк., 2003.
5.
Баландин Д.В., Коган М.М. Метод функций Ляпунова в синтезе законов управ-
ления при интегральном и фазовых ограничениях // Дифференц. уравнения.
2009. Т. 45. № 5. С. 655-664.
6.
Whidborne J.F., Amar N. Computing the Maximum Transient Energy Growth //
BIT Numerical Math. 2011. V. 51. No. 2. P. 447-557.
7.
Поляк Б.Т., Тремба А.А., Хлебников М.В., Щербаков П.С., Смирнов Г.В. Боль-
шие отклонения в линейных системах при ненулевых начальных условиях //
АиТ. 2015. № 6. С. 18-41.
Polyak B.T., Tremba A.A., Khlebnikov M.V., Shcherbakov P.S., Smirnov G.V. Large
Deviations in Linear Control Systems with Nonzero Initial Conditions // Autom.
Remote Control. 2015. V. 76. No. 6. P. 957-976.
8.
Tao G. Adaptive Control Design and Analysis. John Wiley & Sons, 2003.
9.
Андриевский Б.Р., Бобцов А.А., Фрадков А.Л. Методы анализа и синтеза нели-
нейных систем управления. Ижевск: Ин-т компьют. исслед., 2018.
10.
Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное и адаптивное
управление сложными динамическими системами. СПб.: Наука, 2000.
11.
Поляк Б.Т., Хлебников М.В., Щербаков П.С. Управление линейными система-
ми при внешних возмущениях: Техника линейных матричных неравенств. М.:
Ленанд, 2014.
12.
Miller D.E., Davison E.J. An Adaptive Controller Which Provides an Arbitrarily
Good Transient and Steady-State Response // IEEE Trans. Autom. Control. 1991.
V. 36. No. 1. P. 68-81.
138
13.
Bechlioulis C.P., Rovithakis G.A. Robust Adaptive Control of Feedback Linearizable
MIMO Nonlinear Systems With Prescribed Performance // IEEE Trans. Autom.
Control. 2008. V. 53. No. 9. P. 2090-2099.
14.
Bu X., He G., Wei D. A new prescribed performance control approach for uncertain
nonlinear dynamic systems via back-stepping // J. Franklin Institut. 2018. V. 355.
No. 17. P. 8510-8536.
15.
Yin Z., Luo J., Wei C., Yin Z., Luo J., We C. Robust Prescribed Performance
Control for Euler-Lagrange Systems with Practically Finite-Time Stability // Eur.
J. Control. 2020. V. 52. P. 1-10.
16.
Du P., Zhou Q., Liang H., Du P., Zhou Q., Liang H. Neural adaptive prescribed
performance control for interconnected nonlinear systems with output dead zone //
17.
Павлов Г.М., Меркурьев Г.В. Автоматика энергосистем. СПб.: Издание Центра
подготовки кадров РАО “ЕЭС России”, 2001.
18.
Буяхияуй К., Григорьев Л.И., Лаауад Ф., Хелласи А. Оптимальное нечеткое
управление для снижения энергопотребления в дистилляционных колоннах //
АиТ. 2005. № 2. С. 36-45.
Bouyahiaoui C., Grigoriev L.I., Laaouad F., Khelassi A. Optimal Fuzzy Control to
Reduce Energy Consumption in Distillation Columns // Autom. Remote Control.
2005. V. 66. No. 2. P. 200-208.
19.
Ruderman M., Krettek J., Hoffmann F., Bertram T. Optimal State Space Control of
DC Motor // Proc. 17th World Congress The International Federation of Automatic
Control, Seoul, Korea, 2008. P. 5796-5801.
20.
Isidori A. Nonlinear Control Systems. Springer, 1995.
21.
Фомичев В.В., Ильин А.В., Коровин С.К. Методы робастного обращения дина-
мических систем. М.: Физматлит, 2009.
22.
Fridman E. A refined input delay approach to sampled-data control // Automatica.
2010. V. 46. P. 421-427.
23.
Бобцов А.А. Алгоритм робастного управления в задаче слежения за эталонным
сигналом // АиТ. 2003. № 6. С. 104-113.
Bobtsov A.A. A Robust Control Algorithm for Tracking the Reference Signal //
Autom. Remote Control. 2003. V. 64. No. 6. P. 943-950.
24.
Цыкунов А.М. Алгоритмы робастного управления с компенсацией ограниченных
возмущений // АиТ. 2007. № 7. С. 103-115.
Tsykunov A.M. Robust Control Algorithms with Compensation of Bounded Pertur-
bations // Autom. Remote Control. 2007. V. 68. No. 7. P. 1213-1224.
25.
Васильева А.Б., Бутузов В.Ф. Асимптотические разложения решений сингу-
лярно возмущенных уравнений. М.: Наука, 1973.
26.
Liu X., Gu G., Zhou K. Robust stabilization of MIMO nonlinear systems by back-
stepping // Automatica. 1999. V. 35. P. 987-992.
27.
Estrada A., Fridman L., Iriarte R. Combined backstepping and HOSM control design
for a class of nonlinear MIMO systems // Int. J. Robust and Nonlinear Control. 2017.
V. 27. No. 4. P. 566-581.
Статья представлена к публикации членом редколлегии П.С. Щербаковым.
Поступила в редакцию 23.03.2020
После доработки 17.06.2020
Принята к публикации 09.07.2020
139