Автоматика и телемеханика, № 6, 2021
Интеллектуальные системы управления,
анализ данных
© 2021 г. В.В. КОНЕВ , д-р физ.-мат. наук,
А.В. ПУПКОВ (andrewpupkov@gmail.com)
(Томский государственный университет)
ДОВЕРИТЕЛЬНОЕ ОЦЕНИВАНИЕ ПАРАМЕТРОВ АВТОРЕГРЕССИИ
ПО ЗАШУМЛЕННЫМ ДАННЫМ1
Рассматривается задача оценивания параметров процесса авторегрес-
сии по наблюдениям с аддитивным шумом. Разработан последовательный
метод построения доверительной области фиксированных размеров с за-
данным коэффициентом доверия для вектора неизвестных параметров
по конечной выборке. Получены формулы для длительности процедуры,
при которой достигается требуемое качество оценок неизвестных пара-
метров в случае гауссовских шумов. Построение доверительных оценок
параметров основано на использовании специальной последовательной
модификации классических оценок Юла-Уокера, позволяющей оценить
коэффициент доверия при малых и умеренных объемах выборки. Приво-
дятся результаты численного моделирования предлагаемых оценок и их
сравнение с оценками Юла-Уокера на примере доверительного оценива-
ния спектральной плотности.
Ключевые слова: идентификация авторегрессии по зашумленным наблю-
дениям, последовательные оценки Юла-Уокера, доверительное оценива-
ние, гарантированная точность.
DOI: 10.31857/S0005231021060052
1. Введение
Известно, что в теоретических и прикладных исследованиях, связанных с
задачами адаптивного управления и регулирования, фильтрации и прогнози-
рования, анализа спектров и обработки временных рядов, большое внимание
уделяется проблеме идентификации параметров динамических систем, опи-
сываемых стохастическими разностными и стохастическими дифференциаль-
ными уравнениями [1-3]. При этом для широкого круга используемых моде-
лей неизвестные параметры входят линейно в уравнения системы, а иден-
тификация параметров системы заключается в оценивании параметров де-
терминированной или стохастической регрессии [4-7]. Для идентификации
линейных динамических систем разработаны различные эффективные ме-
тоды: наименьших квадратов (МНК), максимального правдоподобия (МП),
1 Работа выполнена при финансовой поддержке Российского научного фонда (проект
№ 17-11-01049).
124
стохастической аппроксимации и др. Теория оценивания параметров детер-
минированной регрессии разработана с исчерпывающей полнотой, позволяя
строить оптимальные оценки по имеющимся данным и контролировать их
точность в момент прекращения наблюдений динамической системы (см.,
например, [8]). Методы классической теории оценивания параметров стоха-
стической регрессии, типичным примером которой являются временные ряды
типа авторегрессии, позволили установить важные асимптотические свойства
оценок при неограниченной длительности наблюдений. При практическом ис-
пользовании оценок обычно исходят из того, что эти свойства сохраняются
при малых и умеренных объемах данных. В последние годы в теоретических и
прикладных исследованиях статистики случайных процессов возрастает роль
последовательных методов анализа, которые отличаются тем, что объем дан-
ных, используемых в оценках, не фиксируется заранее, а определяется специ-
альными правилами остановки наблюдений. Впервые целесообразность при-
менения последовательного анализа для процессов с зависимыми значениями
была установлена в публикациях [9, 10] в задаче оценивания коэффициента
сноса диффузионного процесса. Было доказано, что оценка максимального
правдоподобия, вычисленная в специальный (случайный) момент времени,
превосходит классическую оценку максимального правдоподобия: она явля-
ется несмещенной и гарантирует заданную среднеквадратическую точность.
В дальнейшем последовательный анализ стал успешно применяться в зада-
чах идентификации стохастических динамических систем с дискретным вре-
менем и более сложных моделей с непрерывным временем, позволяя улуч-
шить как асимптотические [11, 12], так и неасимптотические свойства [13-16]
классических оценок МНК и МП. Одним из важнейших результатов после-
довательных методов идентификации является построение точечных оценок
неизвестных параметров уравнений с гарантированной среднеквадратиче-
ской точностью в момент прекращения наблюдений. Последовательные оцен-
ки обычно строятся на основе классических оценок МНК и МП, используя
специальные правила прекращения наблюдений и проводя дополнительные
структурные изменения классических оценок. При этом конструкция после-
довательных оценок существенно зависит от числа неизвестных параметров:
она использует одну классическую оценку МНК, если число неизвестных па-
раметров не превышает размерности процесса, описывающего динамику си-
стемы [13, 14], и она включает целую серию базовых оценок (случайной дли-
ны) в случае, когда число неизвестных параметров больше, чем размерность
процесса [15, 16].
В данной статье рассматривается задача идентификации параметров авто-
регрессии по наблюдениям, искаженным аддитивным шумом. Такая модель
широко используется в задачах фильтрации и прогнозирования, при обра-
ботке сигналов в информационно-измерительных комплексах, анализе речи
и др. Проблеме идентификации параметров зашумленной авторегрессии по-
священо много публикаций [17-22] и др. Основные методы идентификации
можно разбить на две группы. К первой группе относятся методы, исполь-
зующие для описания зашумленной авторегрессии, модели авторегрессии и
скользящего среднего. Затем параметры оцениваются применением модифи-
цированных оценок Юла-Уокера, метода максимального правдоподобия или
125
метода рекуррентного прогноза ошибок. К другой группе методов относят
улучшенные методы МНК [21]. Теоретические исследования свойств оценок
носят асимптотический характер. Они позволили определить потенциальные
возможности построения авторегрессионных моделей в условиях, когда авто-
регрессионный процесс недоступен прямым наблюдениям. При этом вопросы
о точности оценок при малых и умеренных объемах данных остаются откры-
тыми.
Цель данной статьи разработать метод неасимптотического доверитель-
ного оценивания параметров зашумленной авторегрессии. Предполагается,
что шумы, задающие динамику процесса авторегрессии, и шумы в канале из-
мерений являются гауссовскими. Последовательная процедура идентифика-
ции строится на основе одной классической оценки Юла-Уокера, используя
специальные правила остановки наблюдений и дополнительную модифика-
цию структуры оценки с помощью весовых коэффициентов. Конструкция по-
следовательных оценок параметров зашумленной авторегрессии и ее анализ
существенно опираются на недавние результаты по последовательной иденти-
фикации гауссовской авторегрессии по прямым наблюдениям [23, 24]. Задача
неасимптотического доверительного оценивания линейных параметров в мно-
гомерных динамических системах с условно-гауссовскими шумами изучалась
в [25] в предположении, что число неизвестных параметров не превышает
размерности процесса, а сам процесс доступен прямому наблюдению. Другие
подходы к построению последовательных процедур идентификации динами-
ческих систем исследованы в [26, 27]. Отметим, что, помимо задач иденти-
фикации динамических систем, последовательные методы играют ключевую
роль в теории оптимальной остановки [28] и в задачах скорейшего оптималь-
ного обнаружения разладок [29].
2. Постановка задачи. Построение доверительной оценки
для авторегрессии первого порядка
Рассмотрим модель зашумленной авторегрессии AR(p) p-го порядка, опи-
сываемого уравнениями
(2.1)
xk = θ1xk-1 + ··· + θpxk-p + εk,
(2.2)
yk = xk + ηk
,
k ≥ 1,
где {εk} и {ηk} независимые последовательности гауссовских случайных ве-
личин (шумы) с нулевыми средними Eεk = Eηk = 0 и дисперсиями Eε2k = σ2
и Eη2k = Δ2. Параметры θ1,... ,θp неизвестны, и их требуется оценить по на-
блюдениям процесса {yk}. Предполагается, что вектор начальных значений
x0,... ,x1-p процесса AR(p) является случайным, не зависящим от процессов
{εk} и {ηk}.
Из (2.1), (2.2) получаем уравнение для наблюдаемого процесса
(2.3)
yk = YTk-1θ + ξk,
126
где Yk = (yk, . . . , yk-p+1)T, θ = (θ1, . . . , θp)T, ξk = εk + ηk - θ1ηk-1 - . . .
··· - θpηk-p;T обозначает транспонирование. Поскольку оценка МНК для
вектора θ является смещенной, для оценивания θ часто используют оценку
Юла-Уокера, которая вычисляется по наблюдениям yp, . . . , yn по формуле
∑
∑
(2.4)
θ(n) = G-1
Yk-p-1yk, Gn =
Yk-p-1YTk-1.
n
k=2p+1
k=2p+1
Подставляя yk из (2.3) в (2.4), получаем уклонение оценки
∑
(2.5)
θ(n) - θ = G-1nζ(n), ζ(n) =
Yk-p-1ξk.
k=2p+1
Оценка (2.4) является нелинейной функцией от наблюдений, ее свойства
исследованы только при асимптотическом предположении, что объем выбор-
ки сколь угодно велик [2, 3]. Вопрос о качестве оценок (2.4) при малых и
умеренных объемах данных остается открытым.
Цель статьи получить решение задачи доверительного оценивания па-
раметров θ1, . . . , θp в системе (2.1), (2.2) в неасимптотической постановке. На
основе оценки Юла-Уокера (2.4), используя подход последовательного ана-
лиза, построим доверительные оценки для θ = (θ1, . . . , θp)T, выбрав вместо
n специальное правило остановки наблюдений в зависимости от требуемой
точности оценки и проведя дополнительную модификацию структуры самой
оценки (2.4).
Отложив до раздела 3 построение последовательных оценок Юла-Уокера
и их анализ в общей модели (2.1), (2.2), рассмотрим сначала задачу оценива-
ния параметра θ в зашумленном процессе авторегрессии первого порядка
(2.6)
xk = θxk-1 + εk, yk = xk + ηk
,
k ≥ 1.
При этом из (2.4)-(2.6) получаем, что
∑
1
ζ(n)
(2.7)
θ(n) =
yk-2yk,
θ(n) - θ =
,
n ≥ 3,
∑
∑
yk-2yk-1 k=3
yk-2yk-1
k=3
k=3
∑
(2.8)
ζ(n) =
yk-2ξk, ξk = ηk - θηk-1 + εk.
k=3
Точечная последовательная оценка для θ строится в два этапа.
Этап 1. Представление процесса ζ(n) в виде суммы двух мартингалов.
Этап 2. Построение момента остановки наблюдений и выбор весовых ко-
эффициентов в модифицированной оценке Юла-Уокера.
127
Множество индексов суммирования в (2.8) T (n) = {3, 4, . . . , n} разобьем
на нечетные и четные: T (n) = T1(n) ∪ T2(n), где
(2.9)
T1
(n) = {k = 2j + 1 : j = 1, 2, . . . ; k ≤ n},
T2(n) = {k = 2(j + 1) : j = 1,2,... ;k ≤ n}.
Заметим, что количества индексов во множествах T1(n) и T2(n) опре-
деляются величинами d1(n) = [(n - 1)/2], d2(n) = [(n - 2)/2], n ≥ 3, где
[a] обозначает целую часть числа a. Далее запишем сумму (2.8) в виде
ζ(n) = ζ1(n) + ζ2(n), где
∑
(2.10)
ζi(n) =
χ{k∈Ti(n)}yk-2ξk
,
i = 1,2;
k=3
χA обозначает индикатор события A.
Обозначим через m1(n) и m2(n) максимальные индексы в T1(n) и T2(n),
т.е.
m1(n) = max {2j + 1 : j = 1,2,... ;2j + 1 ≤ n},
m2(n) = max {2(j + 1) : j = 1,2,... ;2(j + 1) ≤ n}.
Введем две фильтрации {
n
}n≥0 и {
n
}n≥0, где
F(i)0 = σ{x0},
(2.11)
i = 1,2, n ≥ 1.
F(i)n = σ{x0,ε1,... ,εm
i (n),η1,...,ηmi(n)},
Первый этап завершается следующим результатом.
(
)
(
)
Лемма 1. Процессы ζ1(n),Fn1)
и ζ2(n),Fn2)
в разложении
n≥3
n≥3
(2.10) являются мартингалами.
Доказательство леммы 1 приводится в Приложении.
Построим теперь последовательную оценку Юла-Уокера.
Пусть h > 0. Введем два момента остановки по нечетным и четным на-
блюдениям процесса yk:
d1(n)∑
h
τ1(h) = inf
n≥3:
y22j-1 ≥
,
Δ2 + σ2
j=1
(2.12)
d2(n)∑
h
τ2(h) = inf
n≥1:
y22j ≥
Δ2 + σ2
j=1
Замечание 1. Известно (см., например, [11, 13]), что при построении
последовательных оценок параметра AR(1) по прямым наблюдениям момен-
ты остановки наблюдений определяются с помощью выборочной информа-
ции Фишера. В модели (2.6) с дополнительной аддитивной помехой моменты
128
τ1(h) и τ2(h) выбираются так, чтобы выборочные информации по Фишеру
∑d1(n)
∑d2(n)
y22j-1 и
y22j, содержащиеся отдельно в нечетных и четных на-
j=1
j=1
блюдениях, достигли заданного порога h/(Δ2 + σ2).
Длительность наблюдений в последовательной процедуре оценивания θ
определим равенством
(2.13)
τ (h) = max (τ1(h), τ2
(h)) .
Кроме замены в оценке (2.7) n на τ(h), потребуется некоторая модифика-
ция самой оценки, используя специальные весовые коэффициенты. Сначала
найдем корректирующие множители α1(h) и α2(h), компенсирующие пере-
скоки в (2.12), из уравнений
d1(τ1(h))-1∑
h
y22j-1 + α1(h)y22d
=
,
1(τ1(h))-1
Δ2 + σ2
j=1
d2(τ2(h))-1∑
h
y22j + α2(h)y2d
2(τ2(h)) =
Δ2 + σ2
j=1
Заметим, что 0 < αi(h) ≤ 1, i = 1, 2. Положим
если k = 2j - 1 и j < d1(τ1(h));
1,
β1,k =
α1(h), если k = 2d1(τ1(h)) - 1;
0,
если k > 2d1(τ1(h)) - 1;
если k = 2j + 2 и j < d2(τ2(h));
1,
β2,k =
α2(h), если k = 2d2(τ2(h));
0,
если k > 2d2(τ2(h)).
Построим точечную последовательную оценку Юла-Уокера в виде
τ (h)
-1 τ(h)∑
∑√
θ
(2.14)
τ (h) =
γkyk-2yk-1
√γkyk-2yk,
k=3
k=3
где весовые коэффициенты γk определяются по формуле
β1,k,еслиk∈T1(τ1(h));
(2.15)
γk =
β2,k, если k ∈ T2(τ2(h));
0,
если k ∈ T (τ(h)).
Заметим, что весовые коэффициенты γk в оценке (2.14) равны единице
для наблюдений с нечетными номерами до момента остановки τ1(h), а также
для наблюдений с четными номерами до момента τ2(h); наблюдения в эти
129
моменты используются в суммах с корректирующими множителями α1(h)
и α2(h); остальные коэффициенты в обеих суммах равны нулю.
Покажем, что последовательная оценка (2.14) дает возможность решить
задачу доверительного оценивания параметра θ в зашумленной авторегрес-
сии AR(1) в неасимптотической постановке. Подставляя yk из (2.6) в (2.14),
получаем
ζ(h)
θ
τ (h) - θ =
;
s(h)
(2.16)
τ (h)
τ (h)
∑
∑
s(h) =
√γkyk-2yk-1,
ζ(h) =
√γkyk-2ξk.
k=3
k=3
Обозначим:
τ (h)
∑
ζ(h) = κθζ(h) =
√γkyk-2
ξk,
k=3
(2.17)
√
Δ2 + σ2
ξk = κθξk,
κθ =
Δ2(1 + θ2) + σ2
Подставляя в (2.17) весовые коэффициенты (2.15), получаем разложение
(2.18)
ζ(h)
ζ1(h)
ζ2
(h);
τ1(h)∑
√
ζ1(h) =
χ{k∈T1(τ1(h))}
β1,kyk-2
ξk,
k=3
(2.19)
∑
√
ζ2(h) =
β2,kyk-2
ξk.
χ{k∈T2(τ2(h))}
k=3
Благодаря специальному выбору весовых коэффициентов (2.15) справед-
лив следующий результат.
Лемма 2. Пусть шумы {εk} и {ηk} в (2.6) являются гауссовскими, а
случайные величин
ζ1(h)
ζ2(h) определяются равенствами (2.19).
Тогда для любого h > 0 случайные величины h-1/2
ζ1(h) и h-1/2ζ2(h) явля-
ются стандартными гауссовскими.
Доказательство леммы 2, основанное на теореме П.1, приводится в При-
ложении.
Построим доверительный интервал для θ с заданным коэффициентом до-
верия 0 < ρ < 1. Используя (2.16), (2.18), получаем неравенство
(
)
(2.20)
h-1/2κ∗|θτ(h) - θ|s(h) ≤ h-1/2
ζ1(h)| +
ζ2(h)|
,
κ∗ = min κθ.
|θ|≤L
130
Применяя лемму 2, находим оценку вероятности
(
)
ζ1(h)|
|ζ2(h)|
Pθ
√
+
√
≥µ∗
≤
h
h
(
)
(
)
∗
ζ1(h)|
µ
ζ2(h)|
µ∗
≤Pθ
√
≥
+Pθ
√
≥
=
h
2
h
2
(
)
(2.21)
(
∗
ζ1(h)|
µ
(µ∗))
=2Pθ
√
≥
=4
1-Φ
,
h
2
2
∫z
2
где Φ(z) = (2π)-1/2
e-u2 du.
-∞
Из уравнения
4 (1 - Φ (µ∗/2)) = 1 - ρ определяем µ∗ = µ∗(ρ) = 2Φ-1×
× ((3 + ρ)/4) .
Используя неравенства (2.20), (2.21), приходим к следующему результату.
Теорема 1. Пусть шумы {εk} и {ηk} в (2.6) являются гауссовскими
и точечная последовательная оценкаθτ(h) определяется формулой (2.14).
Тогда для любых 0 < ρ < 1 и h > 0
{
}
|s(h)|
(2.22)
inf
Pθ κ∗
√
|θτ(h)
- θ| < µ∗
≥ ρ.
|θ|≤L
h
Неравенство (2.22) позволяет по заданным коэффициенту доверия ρ и па-
раметру h > 0 построить доверительный интервал для θ. При этом ширина
доверительного интервала зависит от уровней шумов σ2 и Δ2, а также от
статистики s(h).
Асимптотические свойства длительности последовательной процеду-
ры τ(h) и статистики s(h) при h → ∞ для устойчивого процесса авторе-
грессии (2.6) сформулируем в виде следующего утверждения.
Предложение 1. Пусть |θ| < 1, τ(h) и s(h) определяются равенства-
ми (2.13), (2.16). Тогда
τ (h)
2(1 - θ2)
(2.23)
lim
=
почти наверное (п.н.),
h→∞ h
(Δ2 + σ2)((1 - θ2)Δ2 + σ2)
s(h)
2σ2θ
(2.24)
lim
=
п.н.
h→∞ h
(Δ2 + σ2)((1 - θ2)Δ2 + σ2)
Утверждение предложения 1 следует из предложения 2, приведенного в раз-
деле 3.
3. Доверительное оценивание параметров AR(p)
по зашумленным наблюдениям
Рассмотрим теперь общую задачу неасимптотического оценивания пара-
метров θ1, . . . , θp в модели (2.1), (2.2). На основе оценки Юла-Уокера (2.4)
131
построим последовательную процедуру, гарантирующую точность оценок в
момент прекращения наблюдений. При этом развивается подход, использо-
ванный в разделе 2. Во-первых, заметим, что шумовая часть ζ(n) в уклонении
оценки (2.5) не является мартингалом, как и в случае одного неизвестного па-
раметра.
На первом шаге покажем, что процесс ζ(n) допускает представление в виде
суммы мартингалов. Начнем с разбиения множества индексов суммирования
в (2.5):
⋃
T (n) = {2p + 1, 2p + 2, . . . , n} =
Ti(n),
i=1
(3.1)
Ti
(n) = {k = (p + 1)j + p + i - 1 : j = 1, 2, . . . ; k ≤ n}.
Обозначим через di(n) число элементов в множестве Ti(n):
di(n) = [(n - p - i + 1)/(p + 1)], если Ti = ∅, и
di(n) = 0, если Ti = ∅.
При этом максимальный номер ti(n) в (3.1), если Ti(n) = ∅, есть ti(n) =
= 3di(n) + i + 1.
{
}
Для каждого i = 1, p + 1 введем фильтрацию F(i) = Fni)
, где
n≥0
F(i)0 = σ{x0,x-1,... ,x-p+1}, если ti(n) = 0,
(3.2)
F(i)n = σ{x0,x-1,... ,x-p+1;ε1,... ,εt
i(n),η1,...,ηti(n)},еслиti(n)≥1.
Далее векторный процесс ζ(n) в (2.5) представим в виде
∑
∑
(3.3)
ζ(n) =
ζ(i)(n), ζ(i)(n) =
χ{k∈Ti(n)}Yk-p-1ξk.
i=1
k=2p+1
Используя координаты p-мерного вектора ζ(i)(n), т.е.
∑
(3.4)
〈ζ(i)(n)〉l =
χ{k∈Ti(n)}yk-p-lξk
,
l = 1,...,p,
k=2p+1
введем процессы
∑
(3.5)
M(i)l(n) = κθ〈ζ(i)(n)〉l =
χ{k∈Ti(n)}yk-p-
ξk;
k=2p+1
(
)1/2
(3.6)
ξk = κθξk, κθ = (Δ2 + σ2)1/2/
σ2 + Δ2(1 + θ21 + ··· + θ2p)
Учитывая (2.3) и гауссовость шумов εk и ηk в (2.1), (2.2), отметим,
что случайная величин
ξk имеет гауссовское распределение с параметрами
(
)
0, Δ2 + σ2
132
Следующие свойства процессов (3.5) играют ключевую роль при анализе
рассматриваемой процедуры в Приложении.
Лемма 3. Для каждого i = 1,p + 1 случайные процессы M(i)l(n),
l = 1,p, являются квадратично-интегрируемыми мартингалами с условно-
гауссовскими приращениями, т.е.
(
)
Law
∆M(i)l(n)|F(i)
= N(0,σ2i,l(n - 1)),
n-1
причем
)
((
)2
σ2i,l(n - 1) = Eθ
∆M(i)l(n)
|F(i)
n-1
= χ{n∈Ti(n)}(σ2 + Δ2)yn-p-l.
Доказательство леммы 3 дано в Приложении.
На втором шаге построим последовательную модификацию оценки Юла-
Уокера. Сначала для каждого вектора ζ(i)(n) в разложении (3.3) введем p
моментов остановки, связанных с мартингалами (3.5). Пусть h > 0. Положим
τ(i)0(h) = 2p,
∑
h
τ(i)l (h) = inf
n > τ(i)l-1 (h) :
,
χ{k∈Ti(n)} yk-p-l ≥
Δ2 + σ2
(3.7)
k=τ(i)l-1(h)+1
l = 1,p.
Длительность наблюдений в последовательной процедуре определим по
формуле
(3.8)
τ (h) = max
τ(i)p
(h).
1≤i≤p+1
Введенные моменты остановки (3.7) дают возможность контролировать
процесс накопления информации о неизвестных параметрах θ1, . . . , θp. С их
помощью выберем весовые коэффициенты в последовательной оценке Юла-
Уокера. Во-первых, найдем корректирующие множители α(i)l(h), 1 ≤ l ≤ p,
компенсирующие перескоки в (3.7), из уравнений
τ(i)l(h)-1∑
h
χ
y2k-p-l + α(i)l(h)y2
=
,
{k∈Ti(τ(i)l(h))}
τ(i)l(h)-p-l
Δ2 + σ2
k=τ(i)l-1+1
τ(i)0(h) = 2p.
Отметим, что моменты остановки τ(i)1(h), . . . ,
p (h) для каждого i = 1, p + 1
образуют возрастающую последовательность, причем каждый из моментов
строится по квадратичной характеристике σ2i,l(n - 1) своего мартингала (3.5).
133
Положим
{
1,
если τ(i)
(h) < k < τ(i)l(h),
l-1
(3.9)
β(i)l,k(h) =
α(i)1(h), если k = τ(i)l(h),
и определим весовые коэффициенты γl,k равенствами
√
∑
]
(3.10)
γl,k =
µ(i)
β(i)l,k,
µ(i)k,l = χ{k∈T
(k).
k,l
i(k)}χ(τ(i)
(h),τ(i)l(h)
l-1
i=1
Построение последовательной оценки Юла-Уокера завершим определе-
нием.
Определение 1. Для каждого h > 0 последовательный план оценива-
ния вектора параметров θ = (θ1,... ,θp)T в модели (2.1), (2.2) задается па-
рой (τ(h),θ∗(h)), где τ(h)
длительность процедуры, определенная в (3.8),
θ∗(h) = (θ∗1(h),... ,θ∗p(h))T
вектор оценок, задаваемый формулами
(3.11)
θ∗(h) = G-1
(h)ϑ(h).
Здесь ϑ(h) = (ϑ1(h), . . . , ϑp(h))T
p-мерный вектор с координатами
τ (h)
∑
(3.12)
ϑl(h) =
γl,kyk-p-lyk
,
1 ≤ l ≤ p;
k=2p+1
G(h) матрица размера p × p с элементами
∑
(3.13)
〈G(h)〉l,s =
γl,kyk-p-lyk-s.
k=2p+1
Отметим, что в отличие от оценки (2.4) последовательная оценка (3.11)
строится по выборке случайного объема. При этом длительность процеду-
ры τ(h) и весовые коэффициенты γl,k зависят от выбора значения парамет-
ра h, который позволяет контролировать точность оценивания. Используя
точечную оценку (3.11), получаем решение задачи доверительного оценива-
ния в неасимптотической постановке.
Теорема 2. Пусть шумы {εk} и {ηk} в уравнениях (2.1), (2.2) являются
гауссовскими, θ ∈ Θ ⊂ Rp и последовательный план оценивания вектора па-
раметров θ = (θ1, . . . , θp)T определяется формулами (3.8), (3.11). Тогда для
любого 0 < ρ < 1 и h > 0
(
)
κ∗
inf
Pθ
√ ∥G(h)(θ∗(h) - θ)∥ < µ∗
≥ ρ,
θ∈Θ
h
где
κ∗ = inf
κθ,
θ∈Θ
134
(p+ρ)
µ∗ = (p + 1) Φ-1
,
p p+1
a
(3.14)
∫
2
1
Φp (a) =
(p) zp-1e-z2 dz, a ≥ 0.
22 -1Γ
2
0
Доказательство теоремы 2, приведенное в Приложении, опирается на
теорему П.2 о свойствах остановленных квадратично-интегрируемых мартин-
галов с условно-гауссовскими приращениями, установленных в [24]. Соглас-
но теореме 2 для построения доверительной области для вектора параметров
θ = (θ1,...,θp)T по заданному коэффициенту доверия ρ сначала находится
пороговое значение µ∗ по формуле (3.14). Размеры доверительной области
для θ можно сократить, увеличивая параметр h, определяющий длительность
наблюдений в процедуре.
Предложение 2. Пусть AR(p) процесс
(2.1) устойчив, моменты
остановки τ(h) и матрица G(h) определяются равенствами (3.8) и (3.13).
Тогда
τ (h)
p(p + 1)
(3.15)
lim
=
п.н.,
h→∞ h
(Δ2 + σ2) (〈F 〉11 + Δ2)
p
G(h)
(p + 1)F (AT)
lim
=
п.н.,
h→∞ h
(Δ2 + σ2)(〈F 〉11 + Δ2)
где
(
)
∑
θ1
... θp
F =
AjB(AT)j, B = ∥σ2δ1,iδ1,j∥, A =
Ip-1
0
j≥0
Доказательство предложения 2 приводится в Приложении.
Замечание 2. Из предложения 2 следует, что в случае устойчивого про-
цесса (2.1) диаметр доверительного эллипсоида, определяемый теоремой 2,
√
уменьшается с ростом h как const/
h.
4. Численные результаты
Рассмотрим выборочные свойства построенных оценок и оценок Юла-
Уокера для параметра θ в модели (2.6) с гауссовским шумами {εk} и {ηk}
с Eεk = Eηk = 0, Eε2k = 1 и Eη2k = 0,01. Заметим, что при |θ| < 1 наблюдае-
мый процесс {yk} имеет спектральную плотность [2]
(
)
σ2 + Δ2
-2θ cos λ + 1 + θ2
(4.1)
f (λ) =
,
-π ≤ λ ≤ π,
2π (-2θ cos λ + 1 + θ2)
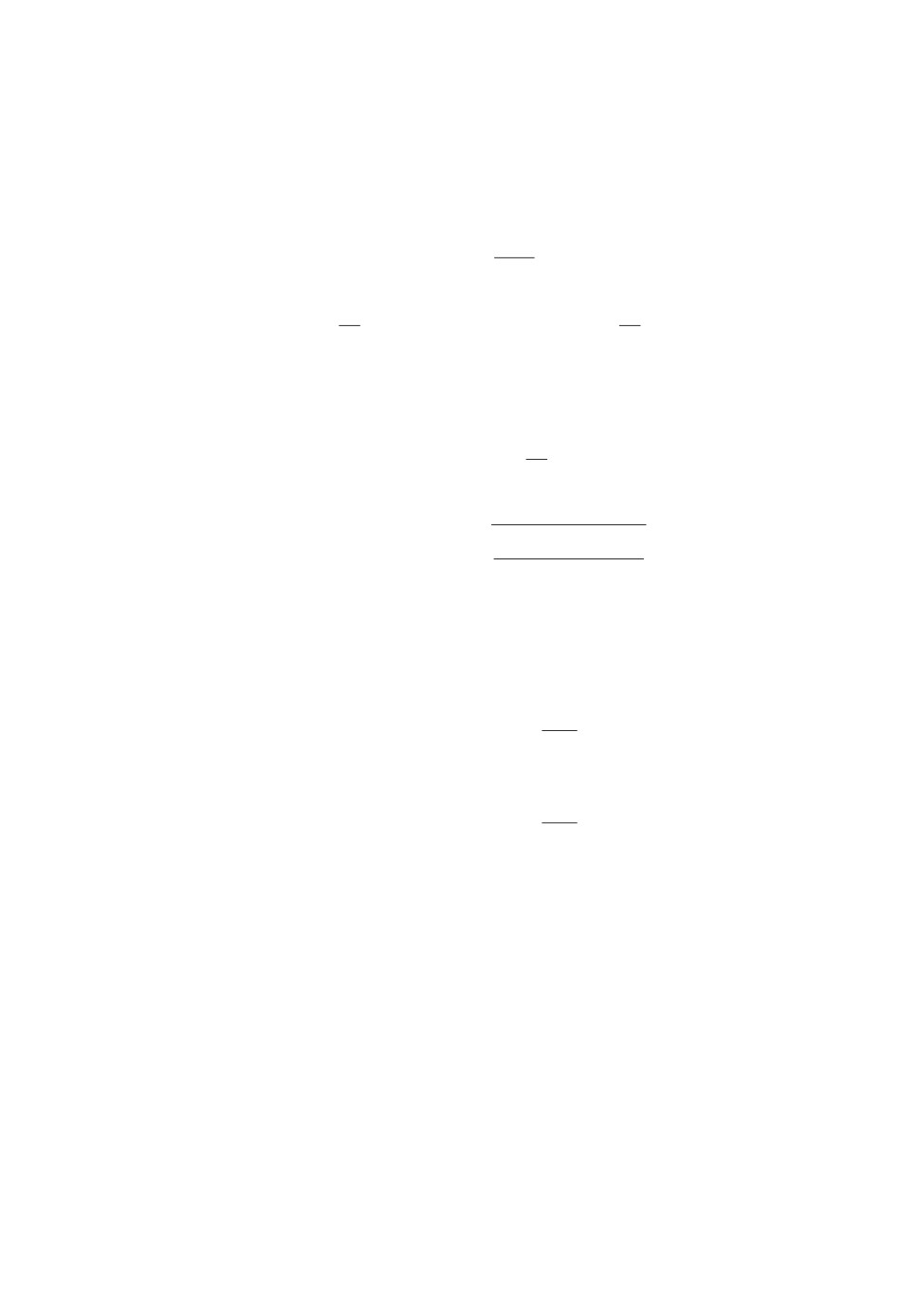
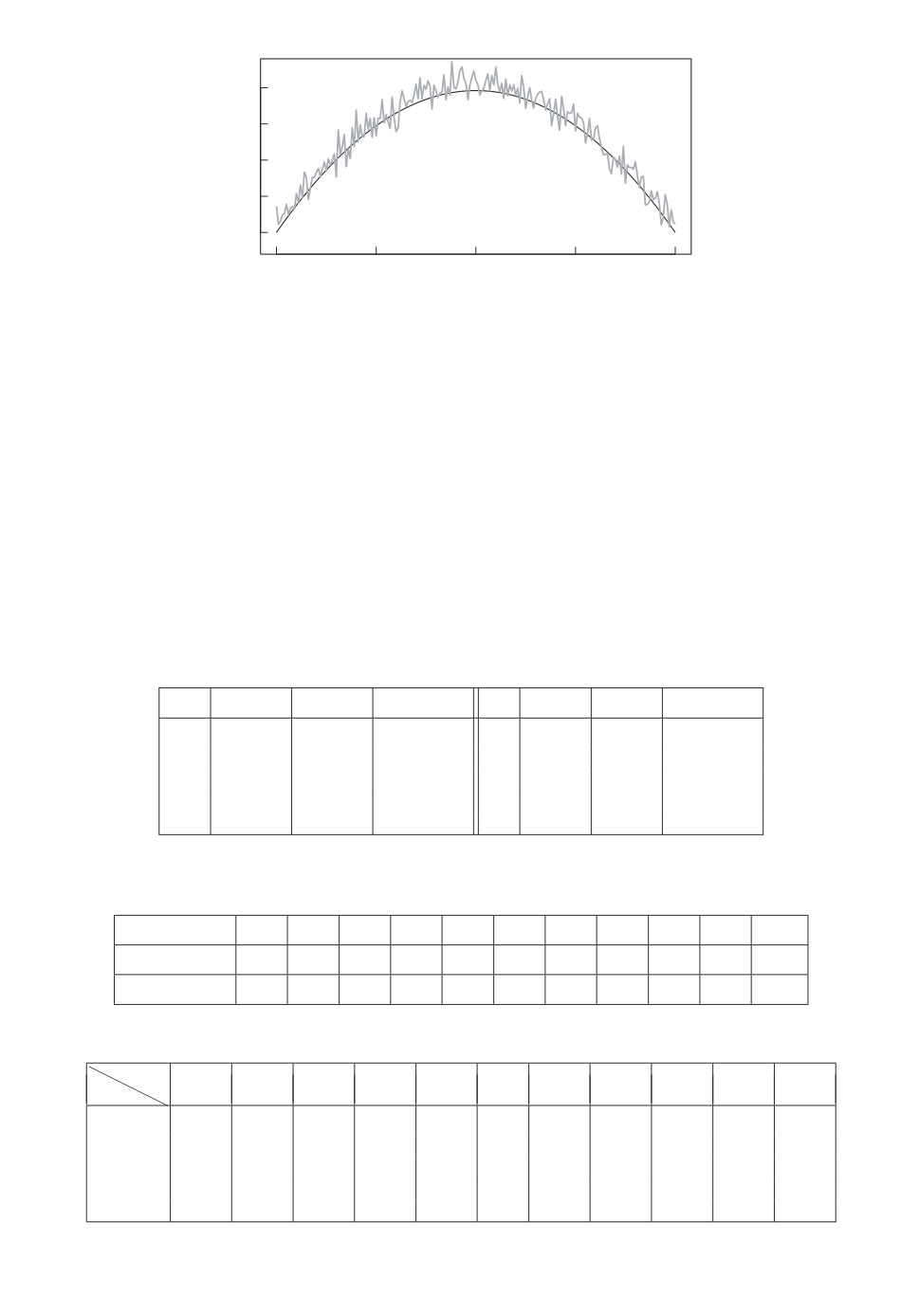
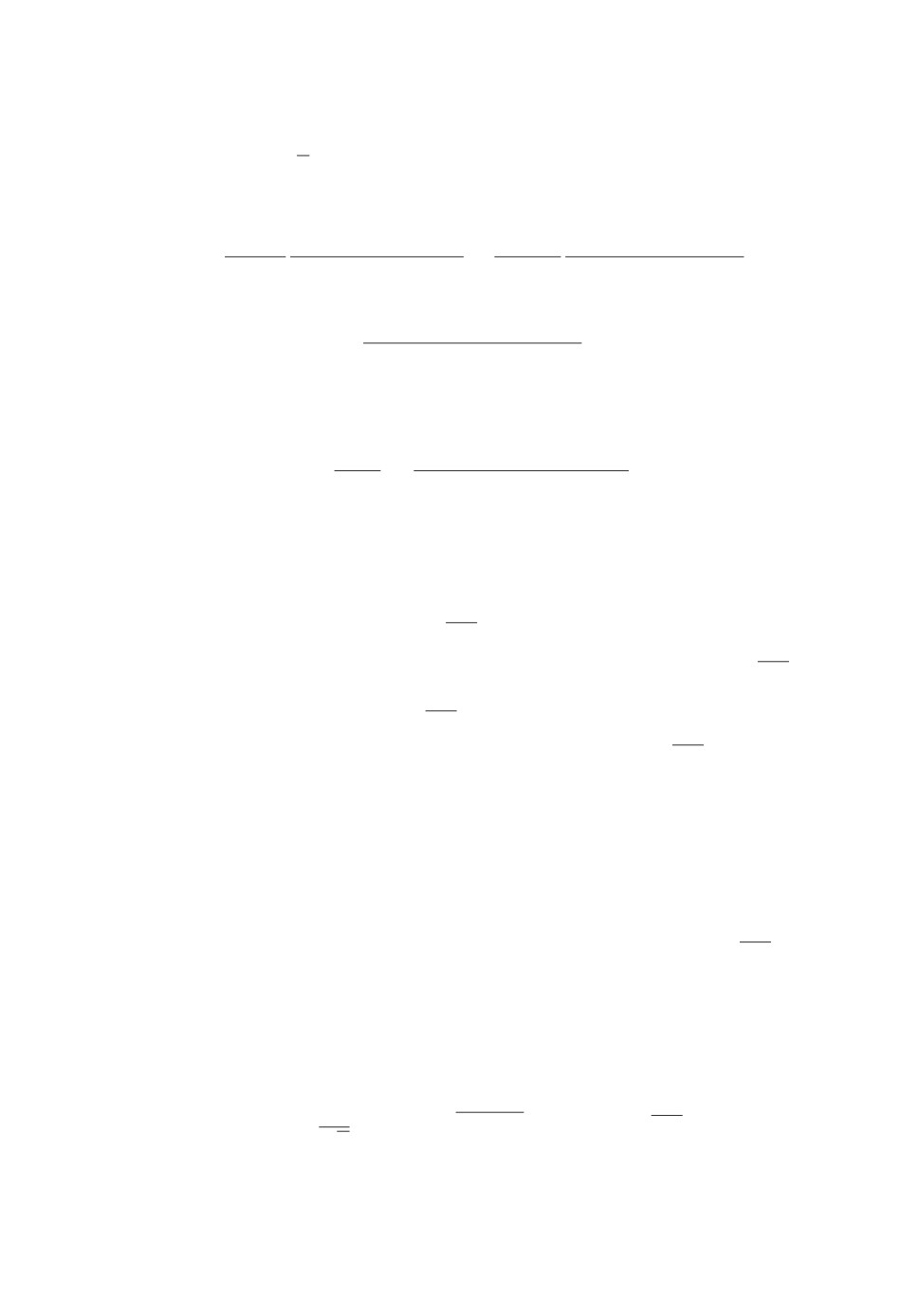
если {xk} в (2.6) является стационарным. На рис. 1 для длительности τ(h)
предлагаемой последовательной процедуры (2.14) приводится выборочное по-
ведение отношения τ(h)/h в зависимости от параметра -1 < θ < 1 при h =
= 300.
135
2,0
1,5
1,0
0,5
0
-1,0
-0,5
0
0,5
1,0
q
Рис. 1. Выборочное поведение отношения τ(h)/h (серая линия) и асимптоти-
ческая кривая (2.23) (черная линия).
В табл. 1 представлены средние значения последовательных оценокθτ(h),
полученные с помощью процедуры (2.14) с h = 1000, а также средние значе-
ния классических оценок Юла-Уокера θn. Средние в обоих случаях вычис-
лялись по 1000 повторений каждой процедуры. При этом объем выборки для
оценок Юла-Уокера выбирался равным соответствующей средней длитель-
ности последовательной процедуры, указанной в столбце τ. Доверительный
интервал на основе последовательной оценки (2.14) строился с помощью тео-
ремы 1. При уровне доверия ρ = 0,9 и |θ| < 1, используя (2.22), получаем
Таблица 1. Усредненные оценки параметра AR(1) (h = 1000)
θ
θ
θn
τ
θ
θ
θn
τ
τ (h)
τ (h)
–1,0
-1,0002
-0,9798
91,5450
0,3
0,2979
0,2979
1832,2460
–0,8
-0,7969
-0,7976
736,0060
0,4
0,3985
0,3987
1693,9700
–0,6
-0,6005
-0,5974
1291,7620
0,6
0,5966
0,5992
1293,2380
–0,4
-0,3972
-0,3998
1690,6190
0,8
0,7984
0,7973
729,5970
–0,3
-0,2994
-0,2991
1829,6720
1,0
0,9993
0,9817
94,9450
Таблица 2. Выборочное поведение отношения |s(h)|/h и предела lim |s(h)|/h
в зависимости от θ (h = 300)
θ
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
lim |s(h)|/h
1,98
1,58
1,18
0,79
0,39
0
0,39
0,79
1,18
1,58
1,98
|s(h)|/h
1,74
1,48
1,25
0,66
0,54
0,10
0,34
0,82
1,26
1,65
1,81
Таблица 3. Усредненная ширина полуинтервала интервальной оценки (4.2)
h
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
θ
500
0,099
0,113
0,151
0,228
0,464
20,1
0,465
0,227
0,152
0,113
0,100
1000
0,068
0,080
0,106
0,161
0,326
13,5
0,330
0,160
0,106
0,080
0,068
2000
0,047
0,056
0,075
0,113
0,226
27,9
0,224
0,112
0,075
0,056
0,047
3000
0,038
0,046
0,061
0,092
0,185
69,6
0,183
0,092
0,061
0,046
0,038
5000
0,029
0,035
0,047
0,071
0,140
10,7
0,143
0,071
0,047
0,035
0,029
136
0,8
q = -0,5
q = 0,5
0,4
0
-3
-2
-1
0
1
2
3
l
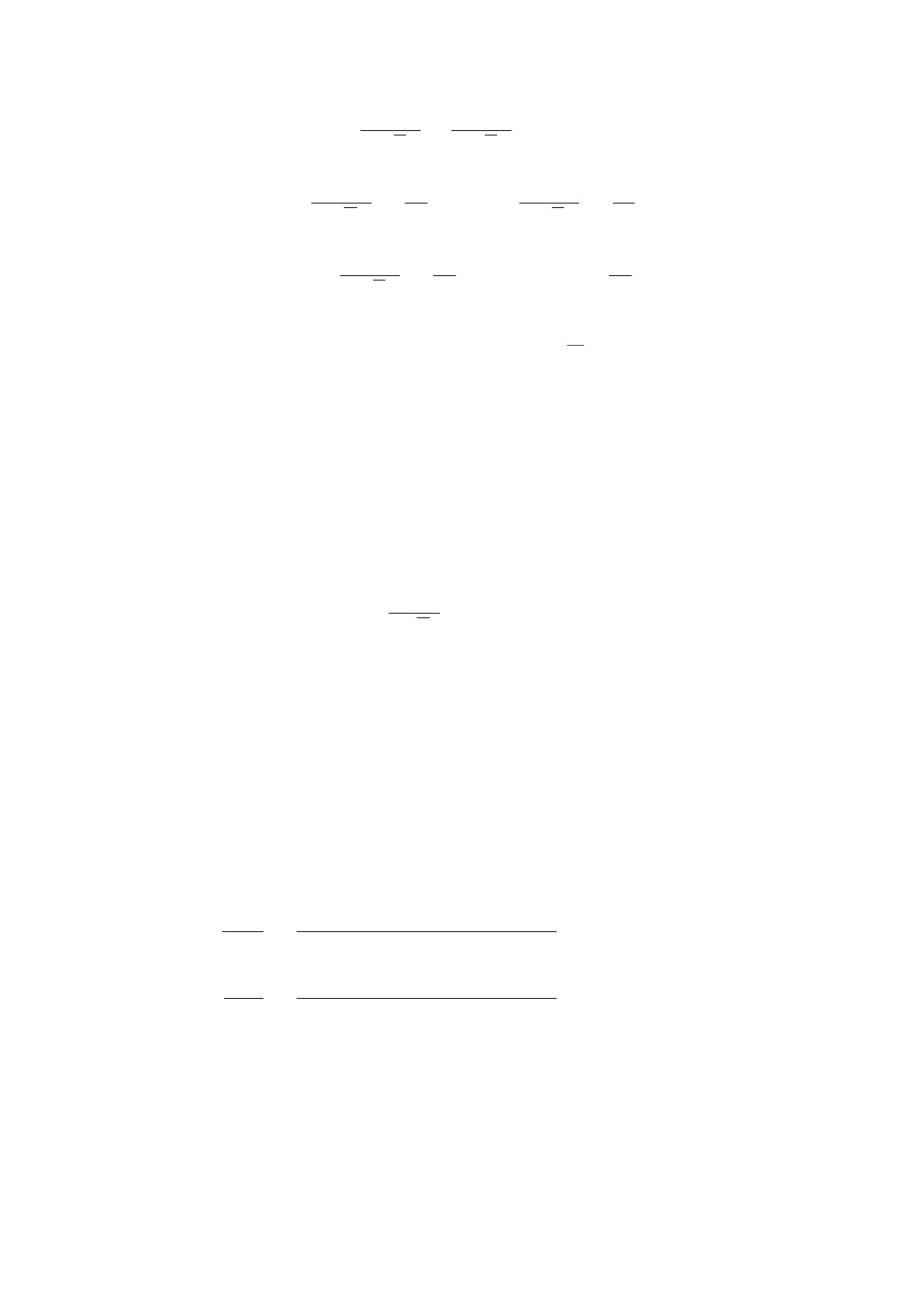
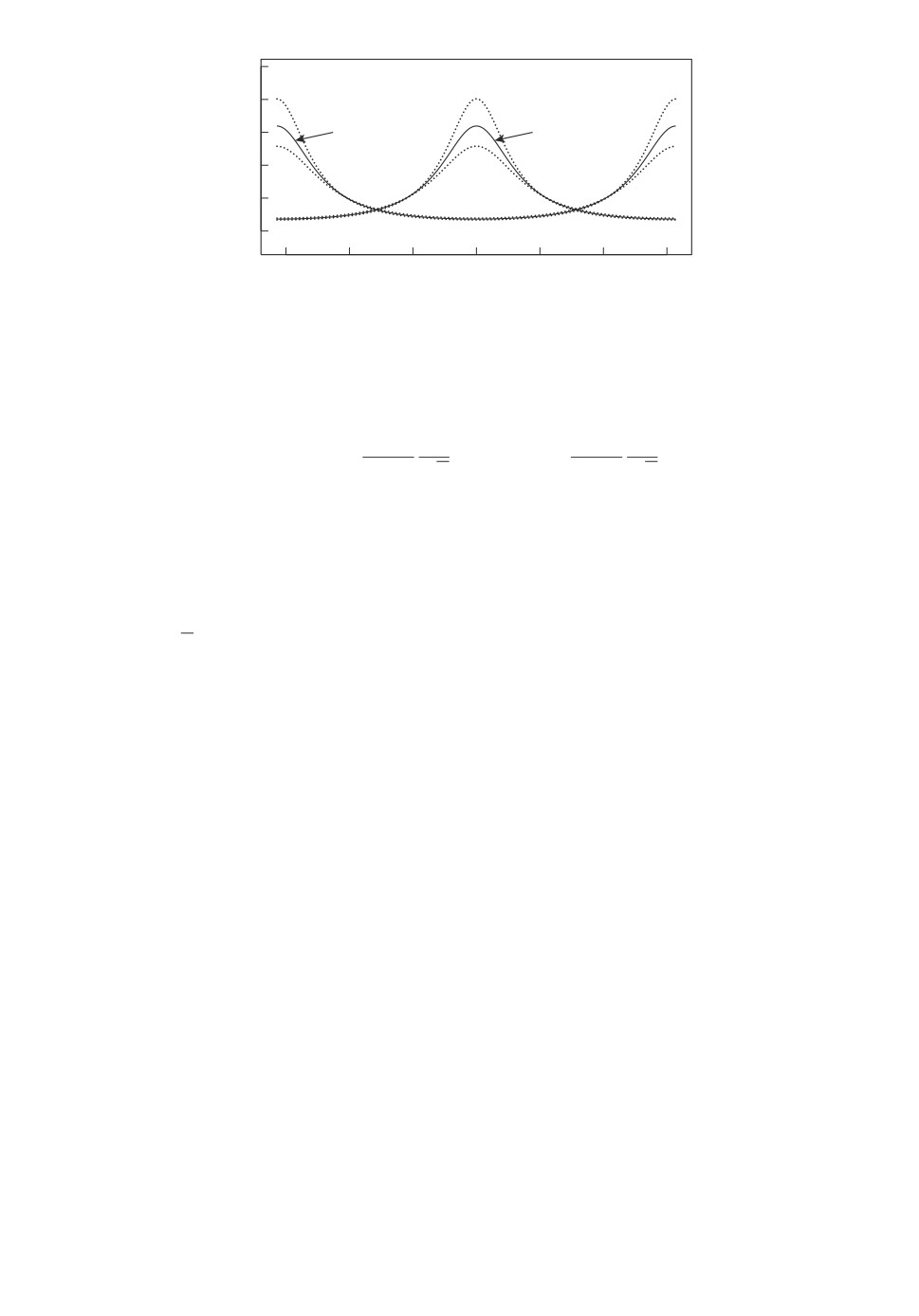
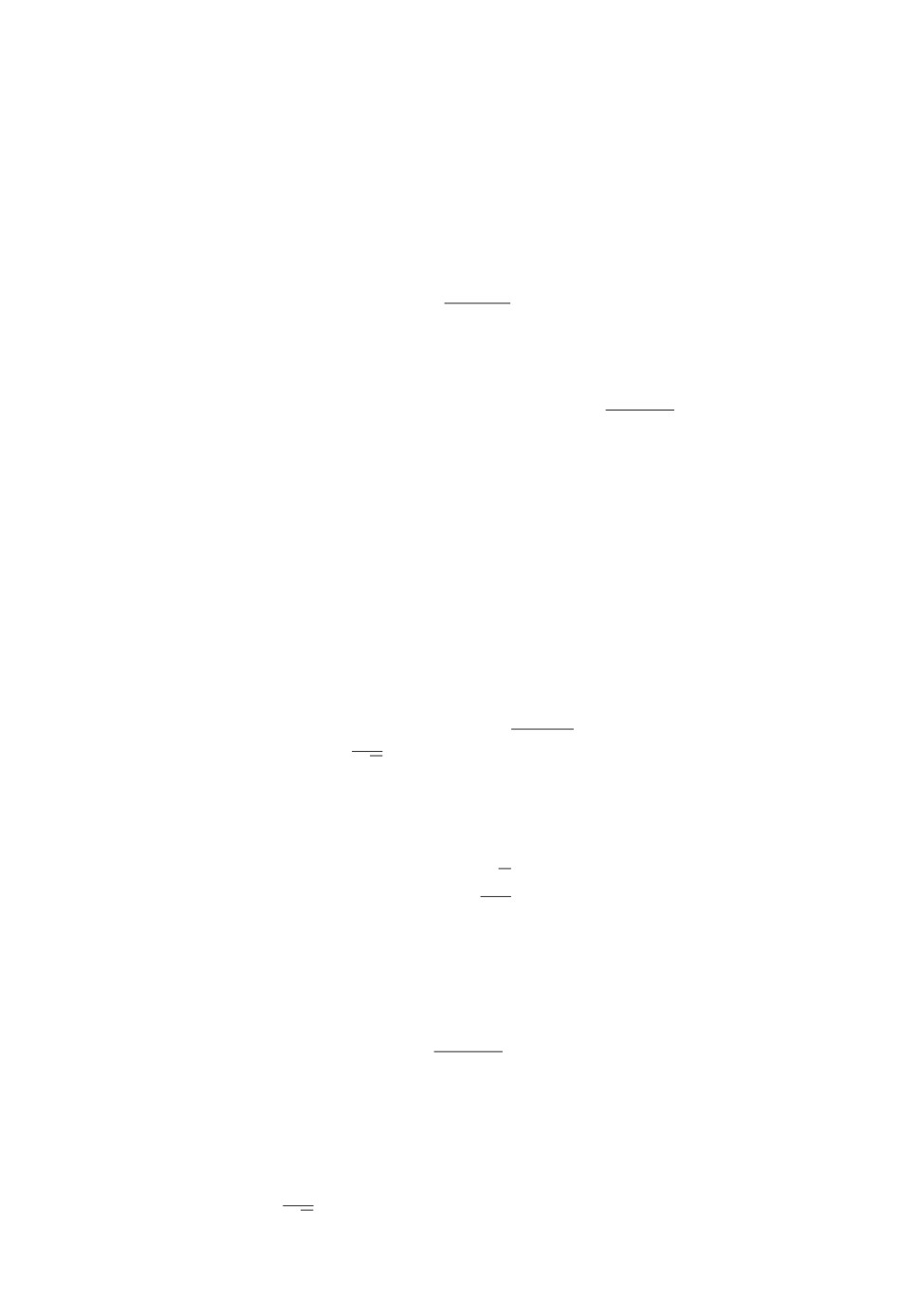
Рис. 2. Доверительные области для оценки спектральной плотности (4.1).
доверительный интервал для θ
(
)
h
1
1
(4.2)
θ
√
, θτ(h) + 3,94h
√
τ (h) - 3,94
|s(h)|
h
|s(h)|
h
Здесь множитель |s(h)|/h выделен, учитывая равенство (2.24). В табл. 2 ука-
заны значения модуля асимптотической кривой (2.24) из предложения 1 для
различных значений θ, а также выборочное поведение этого отношения при
h = 300.
В та√. 3 приводятся выборочные средние для ширины полуинтервала
µ = 3,94
h/|s(h)| доверительного интервала (4.2), полученные по 100 повто-
рениям процедуры, для различных значений θ и h. Как видно из табл. 3,
качество доверительных последовательных оценок существенно зависит от
значений параметра θ, если параметр h, определяющий длительность на-
блюдений τ(h), остается постоянным. При значениях θ, близких к нулю, что
соответствует ослаблению авторегрессионного сигнала xk, требуется значи-
тельно увеличивать порог h, чтобы сохранить приемлемую точность оцени-
вания θ. Это вполне объяснимо, если учесть в (4.2) асимптотическую зависи-
мость (2.24) от θ в предложении 1. При отсутствии условия отделимости |θ|
от нуля порог h, обеспечивающий приемлемое качество доверительного ин-
тервала (4.2), нельзя выбрать априорно, и его приходится подбирать эмпи-
рически, повторяя процедуру оценивания (2.14) для больших значений h.
На рис. 2 представлены доверительные области для оценки спектральной
плотности (4.1), полученные с помощью доверительных оценок для значе-
ний θ = -0,5 и θ = 0,5 при ρ = 0,9 и h = 5000.
5. Заключение
В разделах 2 и 3 предложены и исследованы последовательные процедуры
доверительного оценивания параметров гауссовской авторегрессии по наблю-
дениям с аддитивным гауссовским шумом. Последовательная оценка вектора
неизвестных параметров для авторегрессии любого порядка строится на ос-
нове одной классической оценки Юла-Уокера, вводя специальное правило
прекращения наблюдений и используя весовые коэффициенты в структуре
137
оценки. В теоремах 1 и 2 устанавливается, что предлагаемые последователь-
ные оценки Юла-Уокера дают решение задачи идентификации зашумленной
авторегрессии в неасимптотической постановке, позволяя определить дли-
тельность наблюдений в зависимости от требуемого качества оценивания.
В разделе 4 рассматривается численный пример доверительного оценивания
спектральной плотности зашумленной авторегрессии. Результаты могут ис-
пользоваться в задачах идентификации и управления.
Авторы выражают признательность анонимным рецензентам за конструк-
тивные замечания.
ПРИЛОЖЕНИЕ
Приведем теорему П.1 и теорему П.2 о свойствах остановленных мартин-
галов с условно-гауссовскими приращениями из публикаций [23] и [24], ис-
пользованных в разделах 2 и 3 при выборе весовых коэффициентов (2.15) и
(3.9), (3.10) в последовательных оценках Юла-Уокера (2.14) и (3.11), а также
при определении длительности процедуры. Дадим доказательства некоторых
технических результатов.
Теорема П.1. Пусть (Mk,Fk)k≥0 квадратично интегрируемый мар-
тингал [23] такой, что
а) его квадратическая характеристика удовлетворяет условию
Pθ (〈M〉∞ = +∞) = 1;
б) Law(∆Mk|Fk-1) = N (0, σ2k-1), k = 1, 2, . . ., т.е. Fk-1 условное распре-
деление ∆Mk = Mk - Mk-1 является гауссовским с параметрами 0 и σ2k-1 =
(
)
=E
(∆Mk)2|Fk-1
Для каждого h определим момент остановки
{
}
∑
(Π.1)
τ = τ(h) = inf n > 0 :
σ2k-1 ≥ h
,
inf{∅} = ∞,
k=1
и случайную величину
τ (h)
∑√
1
{ 1,
если 1 ≤ k < τ(h),
m(h) =
√
βk(h)∆Mk, βk(h) =
α(h), если k = τ(h);
h k=1
α(h) множитель, определяемый из уравнения
τ (h)-1∑
σ2k-1 + α(h)σ2τ(h)-1 = h.
k=1
Тогда для любого h > 0 величина m(h) является стандартной гауссов-
ской.
138
(
)
Доказательство леммы 1. Проверим, что
ζ1(n),Fn1)
мар-
n≥3
тингал. Измеримость ζ1(n) относительно
n следует из определений (2.10),
(
)
(2.11). Покажем, что E ζ1(n + 1)|Fn1)
= ζn1). Рассмотрим, например, случай
четного n. Пусть n = 2l, тогда
∑
ζ1(2l + 1) =
χ{k∈T1(2l+1)}yk-2ξk.
k=3
Отсюда
(
)
(
)
∑
E ζ1(2l + 1)|F(1)
=E
χ{k∈T1(2l+1)}yk-2ξk|F2l-
=
2l-1
1
k=3
∑
(
)
= χ{k∈T1(2l+1)}yk-2ξk + χ{(2l+1)∈T1(2l+1)}y2l-1E ξ2l+1|F2l-
1
= ζ1(2l).
k=3
Проверка мартингальности ζ2(n) проводится аналогично.
Лемма 1 доказана.
Доказательство леммы 2. Покажем, что требуемый результат сле-
дует из теоремы П.1. Введем случайные процессы
∑
∑
(Π.2)
M(1)n =
χ{k∈T1(n)}yk-
ξk, M(2)n =
χ{k∈T2(n)}yk-
ξk
,
n ≥ 3.
k=3
k=3
(
)
(
)
Процессы
n
,Fn1)
и
n
,Fn2)
являются мартингалами, при-
n≥3
n≥3
чем
)
((
)2
Eθ
∆M(1)n
|F(1)
=y2n-2Eθ
ξ2nχ{n∈T
n-1
1(n)},
(Π.3)
)
((
)2
Eθ
∆M(2)n
|F(2)
=y2n-2Eθ
ξ2nχ{n∈T
ξ2n = Δ2 + σ2.
n-1
2(n)};
Проверим эти свойства для
n
. По определению T1(n) и T2(n) в (2.9)
получаем
∑
M(1)n =
ξn =
χ{k∈T1(n)}yk-
ξk + χ{n∈T1(n)}yn-
k=3
=M(1)n-1 +χ{n∈T
ξn.
1(n)}yn-
Отсюда ∆
n
=χ{n∈T1(n)}yn-
ξn. Поэтому
)
((
)2
(
)
Eθ
∆M(1)n
|F(1)
ξ2n|F(1)
n-1
=χ{n∈T1(n)}Eθ yn-
n-1
139
Заметим, что если n ∈ T1(n), то F(1)n-1 = F(1)n-2. Если, например, n нечетно,
то число n - 1 четно. Следовательно, m1(n) = n, m1(n - 1) = m1(n - 2). По
определению F(1)n-1 = F(1)n-2. Так как ξ2n не зависит от F(1)n-2, то
)
((
)2
(
)
Eθ
∆M(1)n
|F(1)
=y2n-2Eθ
ξ2
n-1
n
χ{n∈T1(n)}
(
) (
)
Далее заметим, что мартингалы
n
,Fn1)
и
n
,Fn2)
, определяемые
равенствами (Π.2), и их квадратические характеристики (Π.3) удовлетворяют
условиям теоремы П.1. При этом момент остановки τ1(h) в (2.12) совпадает
√
√
с (Π.1). В силу теоремы П.1 случайные величин
ζ1(h)/
h
ζ2(h)/
h явля-
ются стандартными гауссовскими. Лемма 2 доказана.
Доказательство предложения 2. Модель (2.1), (2.2) в векторной
форме записывается в виде
(Π.4)
Xk = AXk-1 + νk, Yk = Xk + ζk,
где Xk = (xk, . . . , xk-p+1)T, νk = (εk, 0, . . . , 0)T, ζk = (ηk, . . . , ηk-p+1)T,
(
)
θ
1
... θp
A=
Ip-1
0
Для анализа τ(h) потребуется асимптотическое поведение суммы
∑
C(i)n =
χ{k∈Ti(n)}Yk-p-1
k-p-1
k=2p+1
Подставив Yk из (Π.4), имеем разложение
(Π.5)
C(i)n = U(i)n + V(i)n + R(i)n;
∑
U(i)n =
χ{k∈Ti(n)}Xk-p-1Xk-p-1,
k=2p+1
∑
V(i)n =
χ{k∈Ti(n)}ζk-p-1ζk-p-1,
k=2p+1
∑
∑
R(i)n =
χ{k∈Ti(n)}ζk-p-1Xk-p-1 +
χ{k∈Ti(n)}Xk-p-1ζk-p-1.
k=2p+1
k=2p+1
Учитывая (3.1), получаем
di(n)∑
(Π.6)
U(i)n =
ZjZTj, Zj = X(p+1)j+i-2.
j=1
140
Последовательность {Zj } удовлетворяет векторному уравнению авторе-
грессии
∑
Zj = Ap+1Zj-1 + wj, wj =
Ap+1-sν(p+1)(j-1)+i-2+s,
s=1
причем
∑
Ewj = 0, EwjwTj = AlB(AT)l =B, B = ∥σ2δ1,iδ1,j∥.
l=0
Поскольку процесс Zj устойчив, то (см., например, [2])
∑
1
lim
ZjZTj
F п.н.;
n→∞ n
j=1
(Π.7)
∑
∑
F = A(p+1)j B(AT)(p+1)j =
AjB(AT)j =: F.
j≥0
j≥0
Из (Π.6) и (Π.7) с учетом (3.1) находим
n
n di(n)
F
(Π.8)
lim
= lim
=
п.н.
n→∞ n
n→∞ di(n) n
p+1
Далее непосредственно проверяется, что
2
n
Δ
Rni)
lim
=
Ip,
lim
=0
п.н.
n→∞ n
p+1
n→∞ n
Отсюда и из (Π.5), (Π.8) получаем
(
)
lim
n-1C(i)n = (p + 1)-1
F +Δ2Ip
n→∞
Так как
∑
χ{k∈Ti(n)}yk-p-l = 〈Cni)〉ll,
k=2p+1
то
∑
(
)
1
1
(Π.9)
lim
〈F 〉11 + Δ2
,
l = 1,p.
χ{k∈Ti(n)}yk-p-l =
n→∞ n
p+1
k=2p+1
Найдем теперь асимптотику для моментов остановки τ(i)l(h). По определе-
нию τ(i)1(h) в (3.7) имеем
τ(i)1(h)-1∑
τ(i)1(h)∑
h
(
χ{
)}y2k-p-1 <
≤
χ{(
)}y2k-p-1.
k∈Ti τ(i)1
k∈Ti τ(i)
Δ2 + σ2
1
k=2p+1
k=2p+1
141
Отсюда, используя (Π.9), получаем
h
1
(
)
lim
=
〈F 〉11 + Δ2
,
p+1
h→∞ (Δ2 + σ2)τ(i)1(h)
т.е.
(i)
τ1
(h)
p+1
lim
=
h→∞ h
(Δ2 + σ2) (〈F 〉11 + Δ2)
Аналогично находим, что
(i)
τl
(h)
l(p + 1)
(Π.10)
lim
=
,
2 ≤ l ≤ p.
h→∞ h
(Δ2 + σ2) (〈F 〉11 + Δ2)
Принимая во внимание (3.8), получаем соотношение (3.15) для длительно-
сти последовательной процедуры. Далее рассмотрим асимптотическое пове-
дение матрицы G(h), определенной в (3.13). Для устойчивого процесса (2.1)
справедливо свойство [2]
∑
1
lim
Yk-p-1YTk-1 = F(AT)p.
n→∞ n
k=2p+1
Аналогично (Π.8) устанавливается, что матрица
∑
D(i)(n) =
χ{k∈Ti(n)}Yk-p-1
k-1
k=2p+1
удовлетворяет предельному соотношению
1
1
(Π.11)
lim
D(i)(n) =
F (AT)p.
n→∞ n
p+1
Далее, подставляя коэффициенты (3.10) в элемент матрицы (3.13) и учи-
тывая, что yk-p-l = 〈Yk-p-1〉l, yk-s = 〈Yk-1〉s, получаем
√
∑
τ(i)l(h)∑
(Π.12)
〈G(h)〉l,s =
χ{k∈Ti(k)}
〈Yk-p-1YTk-1〉l,s.
l,k
i=1 k=τ(i)l-1(h)+1
Учитывая определение коэффициентов (3.9), заметим, что внутренняя
сумма с точностью до одного слагаемого, отвечающего моменту τ(i)l(h), сов-
падает с суммой
τ(i)l(h)∑
〉l,s =
χ{k∈Ti(k)}〈Yk-p-1
k-1
k=τ(i)l-1(h)+1
D
(
)E
D
(
)E
= D(i) τ(i)l(h)
− D(i) τ(i)l-1(h)
l,s
l,s
142
Отсюда и из (Π.10), (Π.11) следует, что
τ(i)l(h)∑
1
lim
〉l,s =
χ{k∈Ti(k)}〈Yk-p-1
k-1
h→∞ h
k=τ(i)l-1(h)+1
D
(
)E
D
(
)E
(i)
D(i) τ(i)l(h)
D(i) τ(i)l-1(h)
τl
(h)
l,s
τ(i)l-1(h)
l,s
= lim
-
=
h→∞
h
h
τ(i)l(h)
τ(i)l-1(h)
T)p
F (A
l,s
=
(Δ2 + σ2) (〈F 〉11 + Δ2)
Используя это равенство в (Π.12), получаем
p
G(h)
(p + 1)F (AT)
lim
=
h→∞ h
(Δ2 + σ2)(〈F 〉11 + Δ2)
Предложение 2 доказано.
Теорема П.2. Пусть заданы [24]:
1) вероятностное пространство (Ω, F, P) с фильтрацией (F)k≥0;(
)
2) семейство M(l),F
, l
= 1, p, квадратично интегрируемых мар-
k
k
k≥0
тингалов с квадратическими характеристиками {〈M(l)〉n}n≥1, l = 1,p, та-
кими, ч(то
)
а) P
〈M(l)〉∞ = +∞
= 1, l = 1, p;
(
)
б) Law
∆M(l)|Fk-1
= N(0,σ2l (k - 1)), k = 1,2,..., l = 1,p, т.е. Fk-1
k
условное распределение приращения ∆M(l)k = M(l)k - M(l)k-1 является гауссов-
)
((
)2
ским с параметрами 0 и σ2l(k - 1) = E
∆M(l)k
|Fk-1
Для каждого h > 0 определим момент остановки
∑
τl = τl(h) = inf
n > τl-1(h) :
σ2l(k - 1) ≥ h
,
l = 1,p,
k=τl-1+1
τ0 = τ0(h) = 0, inf{∅} = +∞,
и случайные величины
∑
√
1
ml(h) =
√
βk(h,l)∆M(l)k, l = 1,p;
h k=τl-1+1
{ 1,
если τl-1(h) < k < τl(h),
βk(h,l) =
αl(h), если k = τl(h);
143
αl(h), l = 1,p,
корректирующие множители, определяемые из уравнений
∑
σ2l(k - 1) + αl(h)σ2l(τl(h) - 1) = h.
k=τl-1+1
Тогда для любого h > 0 случайный вектор m(h) = (m1(h), . . . , mp(h))T име-
ет стандартное нормальное распределение, т.е. m(h) ∼ N(0,Ip), где Ip
единичная матрица размерности p.
Доказательство леммы 3. Запишем (3.4) в виде
∑
M(i)l(n) =
χ{k∈Ti(n)}yk-p-
ξk + χ{n∈Ti(n)}yn-p-
ξn =
k=2p+1
= M(l)i(n - 1) + χ{n∈T
ξn,
i(n)}yn-p-
т.е.
(Π.13)
∆M(i)l(n) = χ{n∈T
ξn.
i(n)}yn-p-
Отсюда имеем
)
((
)2
σ2i,l(n - 1) = Eθ
∆M(i)l(n)
|F(i)
=
n-1
(Π.14)
(
)
ξ2n|F(i)
,
=χ{n∈Ti(n)}Eθ yn-p-
n-1
где F(i)n-1
σ-алгебра, определенная в (3.2). Далее заметим, что если
n ∈ Ti(n), то ti(n) = n, ti(n - 1) = n - p - 1. Поэтому F(i)n-1 = F(i)n-p-1 и слу-
чайная величина y2n-p-l измерима относительно F(i)n-p-1, а
ξn не зависит
от F(i)n-p-1. В силу (3.6) и гауссовост
ξn приращение (Π.13) имеет F(i)n-1
условно-гауссовское распределение, причем, учитывая (Π.14), σ2i,l(n - 1) =
= χ{n∈Ti(n)}(σ2 + Δ2)yn-p-l. Лемма 3 доказана.
Доказательство теоремы 2. Подставляя yk из (2.1) в (3.12) и учи-
тывая (3.13), получаем
(
)
∑
∑
(Π.15)
ϑl(h) =
γl,kyk-p-l
yk-sθs + ξk
=
k=2p+1
s=1
τ (h)
τ (h)
∑
∑
∑
=
γl,kyk-p-lyk-s θs +
γl,kyk-p-lξk = 〈G(h)θ〉l + ζl(n),
s=1
k=2p+1
k=2p+1
где
∑
(Π.16)
ζl(h) =
γl,kyk-p-lξk
,
1 ≤ l ≤ p.
k=2p+1
144
В векторной форме система уравнений (Π.15) имеет вид
(Π.17)
ϑ(h) = G(h)θ + ζ(h); ζ(h) = (ζ1(h), . . . , ζp(h))T.
Подставляя весовые коэффициенты (3.10) в (Π.16), получаем
∑
ζl (h) =
ζ(i)l (h) ,
i=1
(Π.18)
√
τ(i)l(h)∑
ζ(i)l (h) =
β(i)l,k (h) χ{k∈T
i(k)} yk-p-lξk.
k=τ(i)l-1(h)+1
(
)T
Введя векторы ζ(i)(h) = ζ(i)1(h), . . . , ζpi)(h)
, i = 1,p + 1, имеем разложе-
ние
∑
ζ(h) =
ζ(i)(h).
i=1
Далее рассмотрим вектор
(
)T
(Π.19)
m(i)(h) = m(i)1(h),... ,m(i)p(h)
:= κθh-1/2ζ(i)
(h).
Учитывая (3.5), координаты этого вектора запишем в виде
√
τ(i)l(h)∑
1
(Π.20)
m(i)l(h) =
√
β(i)l,k(h)∆M(i)l
(k).
h
k=τ(i)l-1(h)+1
Используя (Π.17), (Π.18), (Π.19), получаем
√
∑
h
(Π.21)
G(h) (θ∗(h) - θ) =
m(i)
(h).
κ
θ i=1
К векторам (Π.19) применима теорема П.2, поскольку мартингалы (3.5) и мо-
менты остановки (3.7) в (Π.20) удовлетворяют в силу леммы 3 всем условиям
этой теоремы. Согласно теореме П.2 все векторы (Π.19) имеют стандартное
p-мерное нормальное распределение N (0, Ip). Отсюда следует, что квадраты
норм этих векторов ∥m(i)(h)∥2, i = 1, p + 1, имеют χ2 распределение с p сте-
(
)
пенями свободы, т.е. P
∥m(i)(h)∥ > a
= 1 - Φp(a), где Φp(a) функция рас-
пределения, определенная в (3.14). Построим доверительную область для θ
по заданной доверительной вероятности. Из (Π.21) имеем неравенство
∑
κθ
(Π.22)
√ ∥G(h)(θ∗(h) - θ)∥ ≤
∥m(i)
(h)∥.
h
i=1
145
Используя оценку
(p+1
)
(
)
∑
∑
µ
(Π.23)
Pθ
∥m(i)(h)∥ > µ
≤ Pθ
∥m(i)(h)∥ >
=
p+1
i=1
i=1
(
)
(
(
))
µ
µ
= (p + 1) Pθ
∥m(1)(h)∥ >
= (p + 1)
1-Φp
,
p+1
p+1
найдем µ по заданному ρ из уравнения (p + 1) (1 - Φp (µ/(p + 1))) = 1 - ρ.
Корень этого уравнения µ∗ определяется формулой (3.14). Используя (Π.22),
(Π.23), получаем
(
)
κθ
Pθ
√ ∥G(h)(θ∗(h) - θ)∥ ≤ µ∗
≥ ρ.
h
Теорема 2 доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Ljung L., Söderstrom T. Theory and Practice of recursive Identification. Cambridge,
Massachusetts: London The MIT Press, 1986.
2.
Андерсон Т. Статистический анализ временных рядов. М.: Мир, 1976.
3.
Brockwell P.J., Davis R.A. Time Series: Theory and Methods. N.Y.: Springer Sci-
ence+Business Media, 1991.
4.
Васильев В.А., Добровидов А.В., Кошкин Г.М. Непараметрическое оценивание
функционалов от распределений стационарных последовательностей. М.: Наука,
2004.
5.
Кашковский Д.В., Конев В.В. Последовательная идентификация линейной ди-
намической системы со случайными параметрами // АиТ. 2008. № 8. С. 82-95.
Kashkovskii D.V., Konev V.V. Successive Identification of the Random-parameter
Linear Dynamic Systems // Autom. Remote Control. 2008. V. 69. No. 8. P. 1344-
1356.
6.
Konev V.V., Pergamenshchikov S.M. Robust Model Selection for a Semimartingale
Continuous Time Regression from Discrete Data // Stoch. Process. Their Appl. 2015.
V. 125. No. 1. P. 294-326.
7.
Емельянова Т.В., Конев В.В. О последовательном оценивании параметров три-
гонометрической регрессии с непрерывным временем // АиТ. 2016. № 6. С. 61-80.
Emel’yanova T.V., Konev V.V. On Sequential Estimation of the Parameters of
Continuous-time Trigonometric Regression // Autom. Remote Control. 2016. V. 77.
No. 6. P. 992-1008.
8.
Себер Дж. Линейный регрессионный анализ. М.: Мир, 1980.
9.
Новиков А.А. Последовательное оценивание параметров диффузионных процес-
сов // Теория вероятн. и ее примен. 1971. Т. 16. № 2. С. 394-396.
10.
Липцер Р.Ш., Ширяев А.Н. Статистика случайных процессов. М.: Наука, 1974.
11.
Lai T.L., Siegmund D. Fixed Accuracy Estimation of an Autoregressive Parameter //
Ann. Statist. 1983. V. 11. P. 478-485.
12.
Galtchouk L., Konev V. On Asymptotic Normality of Sequential LS-estimate for
Unstable Autoregressive Process AR(2) // J. Multivariate Anal., Academic Press.
2010. V. 101. No. 10. P. 2616-2636.
146
13.
Борисов В.З., Конев В.В. О последовательном оценивании параметров дискрет-
ных процессов // АиТ. 1977. № 10. С. 58-64.
Borisov V.Z., Konev V.V. On Sequential Parameter Estimation in Discrete-time
Processes // Autom. Remote Control. 1977. V. 38. No. 10. P. 1475-1480.
14.
Воробейчиков С.Э., Конев В.В. О последовательной идентификации стохасти-
ческих систем // Изв. АН СССР. Техническая кибернетика. 1980. № 4. С. 91-98.
15.
Конев В.В., Пергаменщиков С.М. Последовательные планы идентификации па-
раметров динамических систем // АиТ. 1981. № 7. С. 84-92.
Konev V.V., Pergamenshchikov S.M. Sequential Plans of Parameter Identification in
Dynamic Systems // Autom. Remote Control. 1981. V. 42. No. 7. Part 1. P. 917-924.
16.
Васильев В.А., Конев В.В. Последовательное оценивание параметров динами-
ческих систем при неполном наблюдении // Изв. АН СССР. Техническая ки-
бернетика. 1982. № 6. С. 145-154.
17.
Xia Y., Zheng W.X. Novel Parameter Estimation of Autoregressive Signals in the
Presence of Noise // Automatica. 2015. V. 62. P. 98-105.
18.
Куликова М.В. Максимально правдоподобное оценивание линейных стохасти-
ческих систем в классе последовательных квадратно-корневых ортогональных
методов фильтрации // АиТ. 2011. № 4. С. 99-120.
Kulikova M.V. Maximum Likelihood Estimation of Linear Stochastic Systems in the
Class of Sequential Square-root Orthogonal Filtering Methods // Autom. Remote
Control. 2011. V. 72. No. 4. P. 766-786.
19.
Diversi R., Guidorzi R., Soverini U. Identification of Autoregressive Models in the
Presence of Additive Noise // Int. J. Adapt. Control Signal Process. 2008. V. 22.
No. 5. P. 465-481.
20.
Labarre D., Grivel E., Berthoumieu Y., Todini E., Najim M. Consistent Estimation
of Autoregressive Parameters from Noisy Observations Based on Two Interacting
Kalman Filters // Signal Processing. 2006. V. 86. No. 10. P. 2863-2876.
21.
Zheng W.X. Fast Identification of Autoregressive Signals from Noisy Observations //
IEEE Trans. Circuits and Systems-II: Express Briefs. 2005. V. 52. No. 1. P. 43-48.
22.
Pagano M. Estimation of Models of Autoregressive Signal Plus White Noise // Ann.
Stat. 1974. V. 2. No. 1. P. 99-108.
23.
Конев В.В. Об одном свойстве мартингалов с условно-гауссовскими прираще-
ниями и его применении в теории неасимптотических выводов // ДАН. 2016.
Т. 471. № 5. С. 523-527.
Konev V.V. On One Property of Martingales with Conditionally Gaussian Incre-
ments and Its Application in the Theory of Nonasymptotic Inference // Doklady
Mathematics. 2016. V. 471. No. 5. P. 523-527.
24.
Konev V., Nazarenko B. Sequential Fixed Accuracy Estimtion for Nonstationary
Autoregressive Processes // AISM. 2020. V. 72. No. 1. P. 235-264.
25.
Воробейчиков С.Э., Конев В.В. О доверительном последовательном оценивании
параметров стохастических динамических систем с условно-гауссовскими шума-
ми // АиТ. 2017. № 10. С. 90-108.
Vorobeichikov S.E., Konev V.V. On Sequential Confidence Estimation of Parameters
of Stochastic Dynamical Systems with Conditionally Gaussian Noises // Autom.
Remote Control. 2017. V. 78. No. 10. P. 1803-1818.
26.
Куржанский А.Б., Фурасов В.Д. Идентификация билинейных систем. Гаранти-
рованные псевдоэллипсоидальные оценки // АиТ. 2000. № 1. С. 41-53.
Kurzhanskii A.B., Furasov V.D. Identification of Bilinear Systems. Guaranteed Pseu-
doellipsoidal Estimates // Autom. Remote Control. 2000. V. 61. No. 1. P. 38-49.
147
27. Konev V.V., Pergamenshchikov S.M. General Model Selection Estimation of a Peri-
odic Regression with a Gaussian Noise // AISM. 2010. V. 62. No. 6. P. 1083-1111.
28. Ширяев А.Н. Статистический последовательный анализ. М.: Наука, 1976.
29. Tartakovsky A., Nikiforov I., Basseville M. Sequential Analysis: Hypothesis Testing
and Changepoint Detection. Chapman & Hall/CRC Press, 2015.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 03.02.2020
После доработки 02.04.2020
Принята к публикации 15.01.2021
148